Notas de estructura Localizada
Anuncio

UNIVERSIDAD DE CHILE
FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS
DEPARTAMENTO DE FÍSICA
Estructuras localizadas
disipativas
Marcel G. Clerc
SANTIAGO DE CHILE
MARZO DE 2013
2
Índice general
Índice general
3
1. Ondas solitarias conservativas
5
1.1.
1.2.
Paradigma de ondas no-lineales: Ondas solitarias o Soliton . . . . . . .
6
1.1.1. Ondas solitarias en limite de baja profundidad . . . . . . . . . .
9
1.1.2.
Ondas lineales localizadas . . . . . . . . . . . . . . . . . . . . .
9
Problema de Fermi-Pasta-Ulam . . . . . . . . . . . . . . . . . . . . . .
11
1.2.1.
Problema de Fermi-Pasta-Ulam y Kdv . . . . . . . . . . . . . .
2. Solitones disipativos en sistemas paramétricos
2.1.
2.2.
12
17
Observaciones experimentales de solitones disipativos en sistemas paramétricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
Cadena de péndulos paramétricamente forzados . . . . . . . . . . . . .
20
2.2.1. Limite cuasi-reversible: ecuación de Schrodinger no-lineal forzada
parametricaménte . . . . . . . . . . . . . . . . . . . . . . . . . .
22
2.3.
Resonancia parámetrica efectiva . . . . . . . . . . . . . . . . . . . . .
30
2.4.
Interación de solitones paramétricos . . . . . . . . . . . . . . . . . . .
33
2.4.1. Interacción de un par de solitones . . . . . . . . . . . . . . . . .
34
2.4.2. dinámica auto similar de un gas de solitones . . . . . . . . . . .
39
2.5.
Solitones en un medio inhomogéneo . . . . . . . . . . . . . . . . . . .
42
2.6.
Solitones disipativos con armadura . . . . . . . . . . . . . . . . . . . .
47
2.6.1. Descripción analítica . . . . . . . . . . . . . . . . . . . . . . . .
48
3
4
ÍNDICE GENERAL
2.6.2. Dinámica de fase . . . . . . . . . . . . . . . . . . . . . . . . . .
54
2.6.3. Estabilidad de solitones con fase homogénea . . . . . . . . . . .
56
2.6.4. Solitones con armadura en dos dimensiones . . . . . . . . . . . .
60
3. Estructuras localizadas entre estados homogéneos
61
Bibliografía
63
Capítulo 1
Ondas solitarias conservativas
Los sistemas macróscopicos en equilibrio, es decir, sistemas compuestos por muchos
constituyentes fundamentales aislados o en contactos con un termostato que puede intercambiar energía, partículas, momentum o alguna otra cantidad física, se caracterizan
por exhibir equilibrios homogéneos temporalmente e uniformes espacialmente. Este tipo
de equilibrio son conocidos como equilibrio termodinámico [1]. Perturbaciones locales de
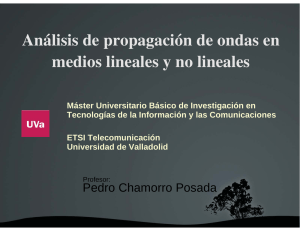
estos estados de equilibrio se caracterizan por exhibir ondas lineales que amortiguan su
amplitud en función del tiempo. En la figura 1.1 se ilustra este tipo de perturbaciones.
Este tipo de comportamientos se describen por medio de la ecuación de ondas o medio
dispersivo con disipación.
Figura 1.1: Ondas amortiguadas observadas en el océano.
5
6
CAPÍTULO 1. ONDAS SOLITARIAS CONSERVATIVAS
Por lo tanto los medios macroscópicos en equilibrio son medios ondulatorios dispersivos
con disipación. Sin embargo, este tipo de comportamiento cambia drásticamente cuando
uno hace perturbaciones de amplitud finita localizadas. Este tipo de perturbaciones
localizadas puede dar origen a uno de los fenómenos paradigmático de la Física NoLineal, la emergencia y evolución de ondas solitaries o solitones.
1.1.
Paradigma de ondas no-lineales: Ondas solitarias
o Soliton
En 1834 la física tendrá un año celebre gracias a las observaciones del ingeniero escocés
John Scott Russell, mientras realizaba experimentos para determinar el diseño más
eficiente para los barcos de un canal, descubrió un fenómeno que él describió como la
ola de traslación. En dinámica de fluidos esta ola o onda no-lineal ahora se llama onda
solitaria o soliton. El descubrimiento se describe a continuación, en sus propias originales
palabras ”Estaba observando el movimiento de un barco que estaba siendo trasladado
rápidamente a lo largo de un estrecho canal por un par de caballos, cuando el barco se
detiene repentinamente, lo que genera que una masa de agua en el canal se había puesto
en movimiento, la cual estaba acumulada entorno a la proa de el barco, y de pronto deja
atrás, rodando hacia adelante con gran velocidad, asumiendo la forma de una elevación
solitaria grande, un montículo redondo, suave y bien definida de agua, la cual siguió
su curso a lo largo del canal aparentemente sin cambio de forma o disminución de la
velocidad. Lo seguí a caballo, y aún así superó en la propagación en a un ritmo de
unos ocho o nueve millas por hora [14 km / h], conservando su figura original a unos
treinta pies [9 m] de largo ya un pie y medio [300-450 mm] de altura. Su altura fue
disminuyendo gradualmente, y después de una persecución de una o dos millas [2.3
km] Lo perdí en los extremos del canal. Tal es, en el mes de agosto de 1834, fue mi
primera oportunidad de ver este fenómeno singular y hermoso que he llamado la ola de
traslación"(John Scott Russel).
1.1. PARADIGMA DE ONDAS NO-LINEALES: ONDAS SOLITARIAS O SOLITON7
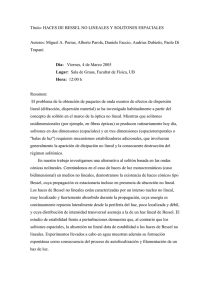
Figura 1.2: El ingeniero escocés John Scott Russell y una recreación de una onda solitaria similar
aquella observada por Scott Russell.
En la figura 1.2 se ilustra un recreación de la onda solitaria observada por John Scott
Russell.
Scott Russell posteriormente realizo investigaciones sistemáticas experimentales y teóricas de las ondas solitarias y concluyo: i) los solitones son estables, y pueden viajar a
distancias muy grandes1 , ii) La velocidad depende del tamaño de la onda, y su anchura
en la profundidad del agua. iii) A diferencia de las olas normales nunca se fusionarán,
por lo que una pequeña onda es alcanzado por una grande, en lugar de la combinación
de los dos. Si una onda es demasiado grande para la profundidad del agua, se divide en
dos, uno grande y uno pequeño.
Observaciones:
La primera caracterización simplemente la podemos entender como resultado que
esta solución es una forma localizada de transporte de energía. En el caso ideali1
Las olas normales tienden a aplanarse por estar en un medio dispersivo.
8
CAPÍTULO 1. ONDAS SOLITARIAS CONSERVATIVAS
zado de modelar este fenómeno por medio de ecuaciones Hamiltonianas [2], estas
soluciones se propagan sin deformación para siempre. Es importante notar que
Scott Russell nota que estas soluciones están fuera del equilibrio en sus términos
”Su altura (soliton) fue disminuyendo gradualmente, y después de una persecución
de una o dos millas”.
De su segunda observación podemos concluir que la forma se modifica en función
de la cantidad de agua transportada, la cual es a su vez una manifestación de
la conservación de energía y masa. Además es la primera manifestación del fenámeno no-lineal subyacente en los solitones, pues su velocidad no es la misma para
solitones de diferente altura. Lo cual contradice el comportamiento típico de un
medio ondulatorio lineal.
La tercera observación es una manifestación del fenámeno no-lineal subyacente en
los solitones. Las ondas lineales están caracterizadas por ser proporcionales a su
causa, es decir, una perturbación de doble amplitud genera ondas de doble amplitud. Luego, la colisión de dos ondas no es la suma de sus respectivas amplitudes,
hay fenómenos de desfasaje de sus posiciones sus máximos como veremos más
tarde.
Las ondas solitarias indeformables descritas por Scott Russell, son de una naturaleza unidimensional desde un punto de vista de su caracterización y dinámica,
es decir, la dirección transversal no juega ningún rol relevante. Sin embargo si
uno realiza una perturbación localizada sobre un lago, es decir ya no un sistema restringido unidimensional como es el caso del canal, no se observan ondas
solitarias.
Es importante notar el espíritu de físico integral de Scott Russell quien a diferencia de
muchos de sus contemporáneos y antecesores el realizo una actividad complementaria
tanto experimental como teórica.
1.1. PARADIGMA DE ONDAS NO-LINEALES: ONDAS SOLITARIAS O SOLITON9
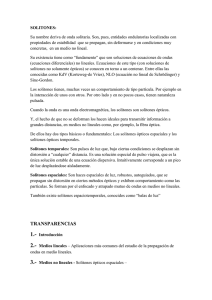
Figura 1.3: Modelo discreto de un medio ondulatorio.
1.1.1.
1.1.2.
Ondas solitarias en limite de baja profundidad
Ondas lineales localizadas
Un medio oscilatorio extendido esta caracterizado por estar constituido microscópicamente por elementos entorno a su posición de equilibrio, los cuales pueden ser modelados
a primera aproximación por osciladores acoplados (ver figura 1.3). Por ejemplo esta es
la descripción usual de una cuerda elástica la cual es modelada por
z̈i (t) = k (zi+1 − 2zi+1 + zi−1 ) ,
(1.1)
donde zi (t) da cuenta del desplazamiento con respecto a su posición de equilibrio del
elemento i-esimo. La separación entre estos elementos esta caracterizada por la distancia
dx. En el limite continuo, uno puede considerar que dx → 0 y k → ∞ de manera
que c2 ≡ k/dx2 es finito y la variable zi (t) se deviene en un campo z(x, t), donde x
da cuenta de la parametrización espacial. El parámetro c da cuenta de la velocidad de
propagación de las perturbaciones entorno a la posición de equilibrio. Luego la ecuación
de osciladores acoplados (1.1) toma la forma (ecuación de ondas lineal)
∂tt z = c2 ∂xx z,
(1.2)
La solución más intrigante de esta escuación es la solución propuesta por D’alambert
z(x, t) = f (x ± ct),
(1.3)
donde f es una función arbitraria que al menos debe ser diferenciable dos veces. Sí signo
± es − (+) la solución anterior da cuenta una solución con perfil f que se propaga
hacia la derecha (izquierda) sin deformarse. Por lo tanto este sistema exhibe ondas que
10
CAPÍTULO 1. ONDAS SOLITARIAS CONSERVATIVAS
se propagan en ambas direcciones con la misma rapidez. En la figura 1.4a se muestra
la evolución de la solución de D’alambert en diagrama espacio tiempo para el caso de
un perfil localizado. Es importante notar que independiente la forma del perfil esta se
propaga con la misma velocidad, como se ilustra en la figura 1.4b. Por lo tanto nunca una
perturbación puede alcanzar a otra. Note que estas soluciones no transportan materia
sino energía y momentun. Dado que el perfil es localizado uno naturalmente puede
asociar una posición a esta solución, por ejemplo la que corresponde a su máximo.
Luego uno puede considerar esta solución como una solución tipo partíacula, la cual
representa una onda aislada. Una pregunta de interés es que ocurre si uno hace colisionar
dos ondas contra propagativas. Es decir que uno considere una solución de D’alambert
más general
z(x, t) = f (x − ct) + h(x + ct),
(1.4)
Como consecuencia del principio de superposición estas dos ondas simplemente se superponen cuando colisionán y continúan sin defeormación e información de que hubo
una colisión. En la Figura 1.4c se ilustra este proceso.
Observaciones:
En estos medios lineales no se puede hablar de ondas solitarias ya que la solución
adquiere la forma que uno impone en las condiciones iniciales.
Como consecuencia del principio de superposición cada solución localizada es
Figura 1.4: Soluciones localizadas de la ecuación de ondas (1.2).
1.2. PROBLEMA DE FERMI-PASTA-ULAM
11
completamente independiente de las otras y por lo tanto no tiene sentido hablar de
interacción, es decir este sistema da cuenta de un gas de partículas independientes,
gas ideas sin ningún tipo de intercambio.
1.2.
Problema de Fermi-Pasta-Ulam
Naturalmente uno espera que la imagen del sistema lineal anterior se debiera modificar ligeramente con la inclusión de las primeras no-linealidades, sin embargo debido
a que el comportamiento anterior no es estructuralmente estable veremos como emergen nuevos comportamientos. En el verano de 1953 la ciencia no lineal entrara en una
inesperada paradoja: Fermi, Pasta, Ulam y María Tsingou (cf. figura 1.5) llevaron a
cabo simulaciones numéricas de una cuerda vibrante en un regimén no-lineal, es decir,
se consideran deformaciones no tan pequeñas. Se encontró que el comportamiento del
Figura 1.5: Evolución de la energía para diferentes modos.
12
CAPÍTULO 1. ONDAS SOLITARIAS CONSERVATIVAS
sistema era bastante diferente de lo que la intuición habría llevado a esperar. Fermi
pensó que después de muchas iteraciones, el sistema podría presentar termalización,
es decir una repartición o equipartición de la energía (comportamiento ergódico) entre
los modos y así olvidaría su condición inicial. Esto basado en el hecho de creer que
los sistemas de pocos grados de libertad exhibían comportamiento caóticos los cuales
no equiparten la energía, pero a medida que uno aumenta los grados de libertad, los
sistemas tienen a equipartir la energía como se observa en el limite termodinámico.
Sin embargo, el sistema exhibe una muy complicada dinámica cuasi-periódica, es decir,
emergían ciertos comportamientos recurrentes privilegiados. Publicaron sus resultados
en un informe técnico de Los álamos en 19552 [3].
El comportamiento exhibido por este sistema se debe a que esté no tiende al equilibrio
termodinámico debido a la razón de que este sistema es integrable [17], es decir, si se
aumenta el grado de libertad también se agregan en la misma proporción cantidades
conservadas, luego la dinámica no es simplemente conservar la energía sino una serie de
otras cantidades, las cuales restringen la dinámica. Como veremos es este en el contexto
que uno espera para sistemas conservativos encontrar soluciones localizadas tipo onda
solitaria.
1.2.1.
Problema de Fermi-Pasta-Ulam y Kdv
Con el objetivo de tener una mejor comprensión del problema tomaremos el límite
continuo de la cadena de osciladores no-lineales siguiendo la linea de pensamiento de
Kruskal and Zabusky [5]. La ecuación que describe la cadena de osciladores (1.1) puede
generalizarse considerando que la constante de acoplamiento entre los osciladores k es
no-lineal, luego la ecuación que describe la cadena de osciladores toma la forma
z̈i (t) = (zi+1 − 2zi+1 + zi−1 ) (ko + α(zi+1 − zi−1 )),
2
(1.5)
Enrico Fermi murió en 1954 y por lo que este informe técnico se publicó después de la muerte de
Fermi.
1.2. PROBLEMA DE FERMI-PASTA-ULAM
13
donde ko y α dan cuenta del acoplamiento lineal y nolinealidad entre los osciladores.
Para considerar el límite continuo consideraremos el siguiente estrategia zi+1 = z(x + h)
y expandiremos esta expresión hasta las derivadas de orden cuatro con el objetivo
de generalizar la ecuación de ondas, es decir, z(x + h) ≈ z(x) + h∂x z + h2 ∂xx z/2 +
h3 ∂xxx z/3! + h4 ∂xxx z/4!. Introduciendo esta aproximación en la ecuación anterior
h4
∂tt z ≈ h ∂xx z + ∂xxxx z
12
!
2
h3
ko + α2 h∂x z + ∂xx z
6
!!
.
(1.6)
consideramos los términos dominantes obtenemos
∂tt z =h2 ko ∂xx z +
h4 ko
∂xxxx z + α2h3 ∂xx z∂x z.
12
(1.7)
En el límite h → 0 y ko → ∞ con hko = c2 , uno obtiene la ecuación de ondas lineal, sin
embargo si consideramos las correcciones anteriores y normalizando la unidades de z
de manera que el coeficiente no-lineal es uno, obtenemos que la ecuación anterior toma
la forma
∂tt z = c2 ∂xx z + γ∂xxxx z + ∂xx z∂x z.
(1.8)
donde γ ≡ h4 ko /12, el cual es un numero pequeño. Esta es una ecuación no-lineal de
ondas. Introduciendo la siguiente variable z = ∂x u y tomando la derivada parcial con
respecto al espacio, la ecuación anterior toma la forma (Ecuación de Boussinesq)
u2
c u+
+ γ∂xx u .
2
!
∂tt u = ∂xx
2
(1.9)
Esta ecuación fue derivada por Boussinesq para dar cuenta de las ondas de superficie
observada por John Scott Russell [6].
Para encontrar la solución y describir la dinámica exhibida por la ecuación (1.8) consideraremos el siguiente ansatz z(x, t) = f (x−ct, τ = t)+w(x−ct, τ ), donde f (ζ ≡ x−ct, τ )
es una función pequeña (f 1) y lentamente variable en ζ y τ , es decir, las derivadas
sucesivas de f cada vez son más pequeñas (∂ζζ f ∂ζ f 1 y ∂τ τ f ∂τ f 1 ), ζ
es la coordenada en el sistema co-movil, τ da cuenta de la dinámica lenta y W es una
función correctiva que dará cuenta de las correcciones no-lineales para f . Introduciendo
el ansatz anterior en la ecuación (1.8) al orden más bajo tenemos
∂tt f (x − ct) = c2 ∂xx f.
14
CAPÍTULO 1. ONDAS SOLITARIAS CONSERVATIVAS
Figura 1.6: Ondas solitarias exhibidas por la ecuación de Korteweg-de Vries (1.15). a) una onda solitaria
y su respectiva evolución en el diagrama espacio temporal; b) colisión de dos ondas solitarias.
Lo que satisface cualquier función suficientemente suave. Al orden siguiente uno obtiene
∂tt W −c2 ∂xx W = c∂ζτ f + γ∂ζζζζ f + ∂ζζ f ∂ζ f.
(1.10)
Para poder resolver la ecuación de W debemos invertir esta ecuación lineal. Luego
imponemos la condición de solubilidad, la cual se traduce en que no pueden haber
términos que dependan explícitamente de ζ. Luego f debe satisfacer
c∂ζτ f = −γ∂ζζζζ f − ∂ζζ f ∂ζ f.
(1.11)
Introduciendo el cambio de variable u(τ, ζ) = −∂ζ f y normalizando el tiempo en unidades de la velocidad de propagación de las ondas, satisface la ecuación de Korteweg-de
Vries
∂τ u = −γ∂ζζζ u + u∂ζ u.
(1.12)
Usualmente este modelo se denomina como ecuación KdV. Este modelo fue propuesto
para explicar las olas en la superficie del agua de poca profundidad por Diederik Korteweg y Gustav de Vries (Korteweg y de Vries 1895) [7] 3 . Es particularmente notable que
KdV sea resoluble exactamente, es decir, una ecuación no lineal en derivadas parciales
cuyas soluciones pueden ser exactamente y con precisión calculada, sistema integrable.
Consideremos el sistema móvil τ = t and ζ = ξ − vt, luego
u2
−γ∂ξξ u +
+ vu .
2
!
0 = ∂ξ
3
la primera vez que se deriva ecuación KdV es por Boussinesq [6].
(1.13)
1.2. PROBLEMA DE FERMI-PASTA-ULAM
15
Si el sistema no tiene flujos exteriores, la constante de integración de la ecuación anterior
es cero. Luego, las soluciones estacionarias de este sistema satisfacen la ecuación tipo
Newton siguiente
γ∂ξξ u = −vu −
u2
.
2
(1.14)
Los puntos de equilibrio de este sistema son u = 0 y u = 2v. El análisis lineal entorno al
origen nos dice que este es un centro y que el otro equilibrio es un punto hiperbólico. En
la Figura 1.8 es ilustrado el respectivo espacio de fase. Donde los equilibrios representan los estados uniformes solo el punto de equilibrio hiperbólico es estable, las órbitas
entorno al centro dan cuenta de soluciones periódicas propagativas, sin embargo estas
soluciones son inestables para el sistema espacio temporal. La solución más interesante
es la solución homoclina que conecta la variedad estable e inestable, respectivamente,
del punto hiperbólico. Esa solución da cuenta de una onda solitaria (ver figura 1.8).
Esta onda es una solución estable del sistema espacio temporal. La homoclina se puede obtener por integración directa de la ecuación tipo Newton (1.14), la cual tiene la
solución (onda solitaria)
"s
2
u(ζ − vτ ) = 3vsech
#
v
(ζ − vτ ) .
4γ
(1.15)
En la figura 1.8 se ilustra la solución anterior. Notamos que para amplitud de la solución
Figura 1.7: Espacio de fase de la ecuación tipo Newton (1.14). Las soluciones periódicas dan cuenta de
ondas periódicas. propagativas y la homoclina da cuenta de una onda localizada
16
CAPÍTULO 1. ONDAS SOLITARIAS CONSERVATIVAS
Figura 1.8: Solitones brillantes y oscuro obtenido desde la ecuación de KdV para positiva y negativa
nolinealidad.
localizadas mas grande la velocidad es mayor y la relación entre ellas esta dada por
una ley de potencia del tipo raíz cuadrada. Luego ondas solitarias de mayor amplitud
atrapan a los solitones más pequeños (ver figura 1.8). Debido a que la ecuación es no
lineal el principio de superposición no es cierto. Al colisionar los solitones la amplitud
del más grande disminuye y la del más pequeño crece y además el más grande y mas
pequeño se adelante y se retrasan en su movimiento, respectivamente.
Por medio de la introducción del campo u(x, t) hemos logrado deducir la ecuación
de Korteweg y de Vries, ecuación (1.15), la cual tiene ondas solitarias como aquellas
ilustradas es la figura (1.6). En el caso de considerar una reflexión en el campo u(x, t)
de la forma u → −u, la ecuación de de KdV es solo modificada por medio del cambio
de signo del termino no-lineal
∂τ u = −γ∂ζζζ u − u∂ζ u.
(1.16)
Esta ecuación exhibe ahora solitones que presenta un hoyo, usualmente denominados
en la literatura como solitones oscuros particularmente en el contexto de la óptica nolineal. Los cuales están asociado a que el medio óptico es de tipo defocousing. Luego
diremos que cuando este signo es positivo (negativo) el medio es de tipo focousing
(defocousing).
Capítulo 2
Solitones disipativos en sistemas
paramétricos
Una forma eficiente de inyectar energía en un oscilador es por medio de realizar un forzamiento exterior a una frecuencia cercana a su frecuencia natural, fenómeno conocido
como resonancia1 . Un fenómeno similar puede ser logrado por medio de la modulación
temporal de algún parámetro físico en un múltiplo de la mitad de la frecuencia natural, lo cual puede generar inestabilidades lineales de los equilibrios bajo estudio. Este
fenómeno es conocido como resonancia paramétrica [9]. Una generalización de este fenómeno a un sistema que no es un oscilador también se puede lograr, es decir, cuando
un sistema es simplemente sometido a forzamiento de frecuencia ω y este responde a
la frecuencia subarmónica ω/2. Este fenómeno puede ser entendido por medio de que
el forzamiento induce un oscilador y a su vez logra hacerlo resonar, auto-resonancia
paramétrica [10]. Luego para dar cuenta de la dinámica exhibida por estos sistemas
es necesario tomar en cuenta los mecanismos de disipación de energía. El balance y
entre disipación e inyección de energía generara comportamientos atractivos, los cuales
usualmente se llaman auto-organización equilibrio [11].
1
Desde los albores de la física moderna este fenómeno fue reconocido y caracterizado por uno de
los fundadores de la física moderna, Galileo Galilei [8].
17
18 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
2.1.
Observaciones experimentales de solitones disipativos en sistemas paramétricos
Cuando uno considera un canal con agua y este se oscila verticalmente, para adecuadas
condiciones iniciales y de los parámetros se observan solitones disipativos (ver figura 2.1)
[12], en este contexto particular se llaman solitones hidrodinámicos no propagativos. Sin
embargo, cuando uno considera un contenedor extendido en dos dimensiones con agua
u otros fluidos newtonianos, no se observa el mismo tipo de comportamiento localizado.
En este caso se observan soluciones localizadas propagativas (c.f. figura 2.1)[13]. La
dirección de propagación es escogida por un quiebre expontáneo de la simetría de revolución de la solución. No obstante, si uno considera otro tipos de fluidos más complejos
Figura 2.1: solitones disipativos paramétricos observados: a) en un canal de agua oscilado verticalmente
[12], estas estructuras localizadas son estacionarias. b) contenedor cilíndrico vibrado verticalmente [13],
en este caso las estructuras localizadas son propagativas.
2.1. OBSERVACIONES EXPERIMENTALES DE SOLITONES DISIPATIVOS EN SISTEMAS PARAM
Figura 2.2: Solitones disipativos paramétricos observados: a) medio granular vibrado verticalmente,
oscilón [14]. b) fluido coloidal vibrado verticalmente[15].
tales forzados paramétricamente como fluidos coloidales [15] o medios granulares fluidizados [14], en dos dimensiones espaciales, uno puede observar soluciones localizadas
estables (cf. figura 2.2). Este tipo de soluciones se suelen denominar como oscilones.
ya que corresponden a soluciones tipo partículas localizadas y oscilatorias. Todas estas
soluciones se caracterizan por ser encontradas en la región donde el estado uniforme
que soporta estas soluciones es estable. Además, esto ocurre en la región de parámetros
cerca donde el sistema exhibe formación de partrones. Luego para observar estas soluciones hay dos caminos simples: i) realizar una perturbación finita localizada, la cual
supera una barrera de nucleicaón, la cual origina la estructura localizada, ii) estar en la
región de parámetros donde se observan patrones y mover los pará metros a la región
de estructura localizadas. En esta última región el patrón se desarma en una suma de
estruturas localizadas [16].
A partir de todos los ejemplos mencionados anteriormente, uno puede concluir que
las estructuras localizadas o solitones disipativos pertenecen a una clase universal de
fenómenos en los sistemas paramétricos. Para entender esto, en la próxima sección
analizaremos un ejemplo prototipo de sistema paramétrico.
20 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.3: Cadena de péndulos acoplados forzados verticalmente.
2.2.
Cadena de péndulos paramétricamente forzados
Un ejemplo clásico que exhibe una resonancia paramétrica es una cadena de péndulos
acoplados forzada verticalmente y amortiguada, la cual se ilustra en la figura 2.3, que
se describe en el límite continuo por
h
i
θ̈(z, t) = − ωo2 + γ sin(ωt) sin θ − µθ̇ + κ∂zz θ,
(2.1)
donde θ(z, t) da cuenta del ángulo del péndulo con la vertical en la posición x en un
instante t, ωo es la frecuencia natural de los péndulos, la cual corresponde en el caso
idealizado a ωo =
q
g/lo con g = 9,8m/s2 y lo es el largo del péndulo. γ da cuenta
de la amplitud del forzamiento, la cual esta relacionado al desplazamiento de la barra
vertical a, por medio de la relación γ = aω 2 /lo y ω es la frecuencia del forzamiento. µ
da cuenta de los mecanismo de disipación de energía y κ da cuenta del acoplamiento
entre los péndulos.
En el límite de γ = ν = 0, la ecuación anterior corresponde a un sistema hamiltoniano
conocido en la literatura como el modelo de Sine-Gordon, el cual es además reversible
temporalmente, cuando uno considera la transformación t → −t y θ → θ. Una solución
trivial del sistema anterior, ecuación (2.1), es θ(x, t) = 0, la cual corresponde a la solución de los péndulos que oscilan simultáneamente de forma vertical. Si uno fuerza el
sistema a una frecuencia cercana a la frecuencia natural ω = 2(ω + ν), donde ν es el
θ( x )
γ
21
θ( x )
2.2. CADENA DE PÉNDULOS PARAMÉTRICAMENTE FORZADOS
x
θ( x )
x
x
θ( x )
γ=ν
x
ν
Figura 2.4: Lengua de Arnold, diagrama de bifurcación de la cadena de péndulos acoplados forzados
verticalmente.
parámetro de desacorde2 entre las frecuencias. Un análisis lineal de la solución vertical
muestra que esta solución es inestable al interior de la región ν 2 + µ2 /4 = γ 2 /16 para
pequeño detuning y amplitud de forzamiento. Esta región es usualmente denominada
lengua de Arnold [17]. En la figura 2.4 se ilustra esta lengua de Arnold en el espacio
de parámetros {γ, ν}. Además, en esta figura se ilustran algunos de los comportamientos dinámicos observados por este sistema tales como oscilaciones uniformes, solitones
disipativos, estructuras localizadas, frentes y soluciones kinks.
Debido a la compleja dinámica exhibida por la cadena de péndulos una estrategia es
estudiar analíticamente la ecuación (2.1). Sin embargo esta ecuación es de un complejo
estudio analítico. Una segunda posibilidad es estudiar numéricamente esta ecuación
acompañada simultáneamente por ecuaciones simplificadas validas en ciertos limites.
2
Este paramétro es conocido como detuning.
22 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Las cuales nos permitirán hacer cálculos analíticos aproximados.
2.2.1.
Limite cuasi-reversible: ecuación de Schrodinger no-lineal
forzada parametricaménte
Consideraremos el límite donde la inyección y disipación de energía es pequeña [18],
es decir, γ ∼ µ ∼ 1 donde es un pequeño parámetro de control de escala.
Por lo tanto, consideraremos el limite de Sine-Gordon, perturbado. Además, para que
la inyección de energía sea eficiente consideraremos que la frecuencia de forzamiento
es cercana al doble de la frecuencia natural, es decir, ω = 2(ω0 + ν) donde ν es el
parámetro de desintonización o detuning y satisface ν ∼ . Luego la ecuación (2.1) se
puede rescribir
θ̈(z, t) = −ωo2 sin θ + κ∂zz θ−µθ̇ + γ sin (2(ω + ν)t),
(2.2)
donde los términos más claros son perturbativos de orden . Introduciendo el siguiente
ansatz basado en la perturbación no-lineal del campo oscilatorio [19]
ε
ε A3 (x, τ )
i(ωo +ν)t
θ(z, t) = 2
A(x, τ )e
−2
ωo
ωo
48
)
iγε
iγ
A(x, τ ) − 3 |A (x, τ ) |2 A(x, τ ) e3i(ωo +ν)t
+
2
16ω0
8ω0
+c.c. + h.o.t,
s
s
(
donde A(x, τ ) es la envolvente de la oscilación vertical uniforme, τ ≡ εt, x ≡
(2.3)
q
2εω0 /kz
son variables lentas, es decir, dan cuenta de la variación lenta de este sistema. La
cual es consecuencia de la separación de escalas entre la oscilación y la dinámica de
la envolvente. Los símbolos c.c. and h.o.t. dan cuenta respectivamente del complejo
conjugado y términos correctivos superiores.
Introduciendo el ansatz anterior en la ecuación (2.2) y después de una gran cantidad
de pasos directos uno puede obtener la siguiente ecuación para la envolvente al orden
dominante (este modelo es conocido como la ecuación de Schrodinger no-lineal forzada
2.2. CADENA DE PÉNDULOS PARAMÉTRICAMENTE FORZADOS
23
parametricaménte)
∂τ A = −iνA − i |A|2 A − i∂x2 A − µ̃A + γ̃ Ā,
(2.4)
donde µ̃ ≡ µ/2, γ̃ ≡ γ/4, y Ā representa el complejo conjugado de A. Los términos
de la ecuación anterior son de orden ε3/2 y las primeras correcciones son de orden ε5/2 .
Este modelo ha sido usado profusamente para describir la formación de patrones y
estructuras localizadas en diversos sistemas físicos tales como: canal de agua forzado
verticalmente [20, 21], estructuras espaciales en redes no-lineales [22], osciladores ópticos paramétricos [23], hilos magnéticos forzados con un campo oscilatorio [24, 25],
medios granulares fluidizados por medio de flujos modulados temporalmente [26], por
mencionar algunos. A partir de los ejemplos anteriores inferimos que el modelo (2.4)
es universal pues da cuenta de una gran gama de sistemas físicos. Por lo tanto su
comprensión nos permitirá entender diversos sistemas físicos que comparten diversos
fenómenos.
Es importante mencionar que la ecuación anterior en el limite reversible, es decir, no
considerar inyección y disipación de eneroía (γ = µ = 0) describe la ecuación de Schrodinger no-lineal, la cual tiene la forma
∂τ A = −iνA − i |A|2 A − i∂x2 A.
(2.5)
Esta es una ecuación hamiltoniana, reversible3 e quizás su propiedad más sorprendente
es que es integrable, luego exhibe solitones o ondas solitarias [27]. Esta ecuación de
campo clásico presenta aplicaciones en óptica, condensado de Bose Eistein y las ondas
de agua. Una simple imterpretación de la ecuación anterior es que esta da cuenta de
una cadena de osciladores no-linales acoplados.
Ecuación de Schrodinger no-lineal forzada parametricaménte: Solitones disipativos
En la figura (2.5) se ilustra el diagrama de bifurcación de la ecuación de Schrodinger
no-lineal forzada parametricaménte (2.4). En la cual se ilustra la región donde se ob3
Transformación de reversibilidad es t → −t y A → −A.
24 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.5: Diagrama de bifurcación de Ecuación de Schrodinger no-lineal forzada parametricaménte.
La linea roja da cuenta de la bifurcación saddle-node donde nacen estas soluciones. En la curva de
Arnold estas soluciones desaparecen pues el soporte homogéneo es inestable.
servan soluciones localizadas exhibidas por este modelo la cual da cuenta a oscilaciones
tipo oscilatorias de la cadena de péndulos (2.1). Con el objetivo de obtener estas soluciones introduciremos la siguiente representación polar A(x, t) = R(x, t)eiθ(x,t) , luego
las ecuaciones toman la forma
∂t R = 2∂x R∂x θ + ∂xx θ − µR + γR cos(2θ),
R∂t θ = νR − R3 − ∂xx R + R(∂x θ)2 − γR sin(2θ).
(2.6)
(2.7)
La solución que da cuenta de los péndulos vertical es R = 0 y θ arbitrario. Consideremos
el siguiente ansatz A(x, t) = R(x)eiθ0 [24, 28], es decir, la fase es constante y la amplitud
es solo función del espacio. Luego
0 = −µR + γR cos(2θ0 ),
(2.8)
0 = νR − R3 − ∂xx R − γR sin(2θ0 ).
(2.9)
2.2. CADENA DE PÉNDULOS PARAMÉTRICAMENTE FORZADOS
25
Luego uno encuentra que
cos (2θ0 ) =
µ
.
γ
(2.10)
La segunda ecuación toma la forma de una ecuación tipo Newton
∂xx R = δ± R − R3 .
donde δ± ≡ −ν − γ sin (2θ) = −ν ±
(2.11)
√ 2
γ − µ2 . La ecuación de Newton tiene un espacio
de fase caracterizado simétrico con respecto al eje ∂x R, luego tiene tres puntos de
√
equilibrio R = 0 y R = δ± , respectivamente uno hiperbólico y los otros son centros.
Dado que este sistema es conservativo y hamiltoniano. Los centros están rodeados de
familias de órbitas periódicas, estas familias asociadas a cada centro están separadas por
sus respectivas separatices o órbitas homoclinas. Todo esto es ilustrado en el respectivo
figura del espacio de fase (ver figura 2.6). Las curvas homoclinas corresponde a solitones
disipativos. Para obtener estas soluciones integramos la ecuación de Newton
E=
(∂x R)2
R2 R4
− δ±
+
,
2
2
4
Donde E es la respectiva energía efectiva asociada a la ecuación tipo Newton. Considerando que la solución asintoticaménte converge al estado cero. la Energía de estas
curvas homoclinas es cero, luego integramos la ecuación anterior y obtenemos
√
Z
Z
2dR
q
= dx = x − xo .
R 2δ± − R2
Introduciendo el cambio de variable u(x) = 1/R(x), entonces du = dr/R2
√
Z
2du
q
= x − xo .
2δ± u2 − 1
√
Posteriormente consideramos el cambio u(x) = cosh(φ(x))/ 2δ± , luego
Z
dφ = φ =
q
δ± (x − xo ),
tomando el coseno hiperbólico de esta expresión obtenemos y dividiendo por
√
cosh δ± (x − xo )
cosh φ
√
u= √
=
,
2δ±
2δ±
√
2δ±
26 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.6: Espacio de fase de la ecuación tipo Newton 2.11. Los puntos {a, b} dan cuenta de los puntos
de equilibrio del sistema. La curva roja representa la solución homoclina.
finalmente la solución soliton disipativo tiene la forma
q
1 q
δ± (x − xo ) ,
= 2δ± sec h
u
µ
,
cos(2θ) =
γ
R± (x) =
(2.12)
(2.13)
La amplitud del soliton y el respectivo ancho están caracterizados por el parámetro δ± .
Por otro lado, la fase del soliton esta fijada por el balance entre la disipación e inyección
√
de energía. El parámetro δ± = −ν ± γ 2 − µ2 . Donde la curva ν 2 = γ 2 − µ2 , lengua de
Arnold, da cuenta de la región en el espacio de parámetros donde la solución uniforme
de los péndulos que oscilan verticalmente θ = 0 (A = 0) es inestable. Notamos que la
Figura 2.7: Representación gráfica de solitones para diferentes amplitud de forzamiento γ1 < γ2 < γ3 .
La solución continua y segmentada corresponde a δ+ (estable) y δ− (inestable), respectivamente.
2.2. CADENA DE PÉNDULOS PARAMÉTRICAMENTE FORZADOS
27
expresión δ± solo es real para γ 2 > µ2 , es decir, cuando la inyección de energía supera la
disipación el sistema exhibe la emergencia de soluciones localizadas por medio de una
bifurcación saddle-node. Por lo tanto, emergen un par de soluciones extendidas finitas
y por razones topológicas una debe ser estable y la otra inestable. A medida que uno
continua aumentando por ejemplo el forzamiento estas soluciones se van diferenciando
pues una crece en amplitud y disminuye en el ancho–la cual esta determinada por δ+ –y
la otra inversamente decrece en amplitud y aumenta en el ancho (ver figura 2.7)–la
cual esta determinada por δ+ . Luego cuando el parámetro de forzamiento coincide con
la lengua de Arnold δ− se hace cero, luego el soliton disipativo de pequeña amplitud
colisiona con la solución uniforme, produciendo que esta se deviene inestable. Notar
bien que esto corresponde a la inestabilidad paramétrica de la solución vertical. Luego
Por consistencia topologíca, dado que la solución uniforme vertical era estable, entonces
el soliton de pequeña amplitud (δ− ) debe ser inestable y luego el de amplitud grande
es estable. Sin embargo, al interior de la lengua de Arnold la solución uniforme que
0.6
0.4
Re(ψ)
Im(ψ)
0.3
Re(ψ)
Im(ψ)
0.2
0
1.0
80
cos(2ϕ)= µ_
γ
120
0
80
120
0.5
-3
-2
-1
1
2
3
0
0
-0.5
-0.2
-0.4
80
-0.3
Re(ψ)
Im(ψ)
120
-1.0
-0.6
80
Re(ψ)
Im(ψ)
120
Figura 2.8: Representación gráfica del mecanismo de emergencia de solitones disipativos, saddle-node.
Las figuras insertadas dan cuenta de las soluciones en las respectiva representación cartesiana. Las
soluciones estables e inestables están representadas por círculos llenos (vacíos) o figuras insertadas con
marcos continuos (segmentados).
28 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
soporta al soliton es inestable luego en esta región el soliton también es inestable. En
resumen el más grande soliton disipativo es estable y nace por saddle-node en γ 2 = µ2
y es inestable en la curva de la lengua de Arnold. La región coloreada de la figura 2.5
ilustra la zona donde los solitones disipativos son observados.
Otra manera de entender el mecanismo de aparición de estas soluciones es por medio
de analizar geométricamente la condición que fija la fase cos(2θ) = µ/γ. En la figura 2.8
se ilustra la intercepción respectiva de una constante con la función trigonométrica en
el rango (−π, π). Luego para γ pequeño no hay intercepción, es decir, no hay soluciones.
Aumentando γ hasta que es igual a µ, entonces la ecuación anterior tiene soluciones,
las cuales aparecen de a dos pares como se ilustra en la figura 2.8. La aparición de
apares es consecuencia de la simetría de reflexión de la ecuación de Schrodinger no-lineal
forzada parametricaménte (2.4), es decir, el sistema es invariante ante la transformación
A → −A. Por lo tanto el sistema exhibe dos soluciones estables e inestables. En la figura
2.8, las soluciones estables e inestables esta representadas por círculos llenos (vacíos) o
a)
b)
6 cm
h(x)/H
0.6
c)
0.4
0.2
0
−6
−4
−2
0
(x−xo)/H
2
4
6
Figura 2.9: Solitones disipativos (a) soliton disipativo estable observado en la modelo (2.4). (b) Imagen
de un soliton hidrodinámico no propagativo observado en un recipiente 45 cm de largo y 2,54 cm
rectangular, lleno de H = 1,5 cm de agua y forzado verticalmente. Solo dos terceras partes de la canal
se muestra. (c) perfil de la superficie instantánea (línea azul) con la imagen mostrada en (b). La línea
roja continua muestra el ajuste predicho por la solución (2.12).
2.2. CADENA DE PÉNDULOS PARAMÉTRICAMENTE FORZADOS
29
figuras insertadas con marcos continuos (segmentados).
El análisis anterior nos permite concluir que un mecanismo natural de emergencia
de soluciones localizadas es por medio de la parición de un par de soluciones con estabilidades complementarias (estable-inestable), saddle-node. Este tipo de mecanismo ha
sido usado para explicar la emergencia de pulsos en medios oscilatorios genéricos [29].
Comparación con los solitones hidrodinámicos no propagativos en un fluido
forzado verticalmente
Teóricamente un canal con agua forzado paramentricaménte es descrito por la ecuación
de e Schrodinger no-lineal forzada parametricaménte [20, 30, 31], donde la amplitud A
da cuenta del modo sub-harmónico transversal para la altura4 y da cuenta del potencial
para la velocidad. En la figura 2.9 se ilustra el soliton hidrodinámico no propagativo
observado en este sistema y se compara con la solución predicha, formula (2.12), la cual
4
Si h es la altura entonces h = Aeωt y si φ potencial de velocidad φ = Aeωt/2 .
Figura 2.10: Fase de equilibrio, del soliton no propagativo en función del forzamiento. Los puntos
representan datos experimentales subiendo y bajando el forzamiento. La linea sementada es obtenida
usando la formula (2.14).
30 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
muestran un muy buen acuerdo.
Otra propiedad interesante que uno puede deducir de la condición geométrica es el
comportamiento de la fase como función del parámetro de forzamiento, el el caso que
el forzamiento es del orden de la disipación γ = µ + ∆γ, ∆γ 1, entonces
cos(2θ0 ) =
µ
1
∆γ
=
∆γ ≈ 1 −
µ + ∆γ
µ
1+ µ
por otro lado cuando, la inyección de energía es del orden de la disipación el ángulo es
pequeño (ver figura 2.9), luego θ0 es pequeño y entonces el cos(2θ0 ) ≈ 1 − (2θ0 )2 /2,
luego uno encuentra la relación para la fase y el incremento del forzamiento
s
θ0 ≈
∆γ
,
2µ
(2.14)
es decir, la fase crece con la raíz cuadrada del corrimiento del forzamiento con respecto
al punto crítico. En la figura 2.9, se comprueba la ley anterior.
2.3.
Resonancia parámetrica efectiva
El análisis anterior, se uso como pilar fundamental la resonancia parámetrica basada
que un sistema se fuerza al doble de su frecuencia natural. Sin embargo éste concepto se
puede generalizar de la siguiente manera: Un sistema exhibe una resonancia paramétrica
cuando este es sometido a una frecuencia ω y el responde a una frecuencia subarmónica
del forzamiento nω/2. Éste tipo de fenómeno puede ocurrir a cualquier sistema que
incluso no tienen una frecuencia natural [10].
Con el objetivo de enfatizar la idea anterior, seguiremos el método propuesto por E.
Butikov [32], para analizar la inestabilidad paramétrica de un oscilador forzado descrito
por la ecuación.
h
i
θ̈(t) = − ωo2 + γ sin(ωt) sin θ − µθ̇.
(2.15)
Primeramente, nosotros consideraremos que el ángulo es pequeño luego, la ecuación
anterior se puede rescribir
h
i
θ̈(t) ≈ − ωo2 + γ sin(ωt) θ − µθ̇.
(2.16)
2.3. RESONANCIA PARÁMETRICA EFECTIVA
31
consideremos el siguiente ansatz
θ(t) =
∞
X
C2n−1 eiωt(2n−1)/2 + C̄2n−1 e−iωt(2n−1)/2
n=1
donde Cn son constantes. Introduciendo el ansatz anterior en la ecuación (2.16) uno
encuentra una jerarquía de ecuaciones, donde cada termino es proporcional a eiωtn/2 .
Por simplicidad, a primer orden consideraremos los primeros modos e ignorando los
modos superiores5 los cuales satisfacen la ecuación
iω
ω2
γ
C1 = − ω02 + µ
C1 − i C̄1 ,
4
2
2
2
γ
iω
ω
C̄1 + i C1 ,
− C̄1 = − ω02 − µ
4
2
2
−
(2.17)
(2.18)
Esta expresión se puede rescribir
5
ω02
+
µ iω
2
−i γ2
−
ω2
4
i γ2
ω02 − µ iω
−
2
ω2
4
C1
= 0,
C̄1
Método de Galerkin [33].
Figura 2.11: Curvas de inestabilidad paramétrica. las curvas son obtenidas usando diferentes número
de modos.
32 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
esta ecuación tiene una solución no trivial si el determinante de la matriz anterior es
cero, luego
ω02
ω2
−
4
!2
ω
− µ
2
2
2
γ
2
=
.
Introduciendo el desplazamiento del péndulo en unidades de longitud del péndulo γ =
aω 2 , luego la relación anterior toma la forma
ω02 1
−
ω2 4
!2
µ
−
2ω
2
2
=
a
2
.
En la figura 2.11, la curva segmentada negra ilustra la formula anterior. La expresión anterior se puede mejorar considerando los otros modos. Es decir, aumentando la
dimensión del Galerkin bajo estudio
θ = C1 eiωt/2 + C̄1 e−iωt/2 + C3 ei3ωt/2 + C̄3 e−i3ωt/2 ,
luego uno obtiene el conjunto de ecuaciones
ω2
C1 = − ω02 + i µω
C1 − i γ2 C̄1 − i γ2 C3,
2
4
ω2
− C̄1 = − ω02 − i µω
C̄1 + i γ2 C1 + i γ2 C̄3,
2
4
ω2
= − ω02 + i µω
− C3
C3 − i γ2 C1 ,
2
4
ω2
= − ω02 − i µω
− C̄3
C̄3 + i γ2 C̄1 .
2
4
−
(2.19)
(2.20)
(2.21)
(2.22)
Luego escribiendo la expresión anterior en forma matricial
2
µω
ω
2
− 4 + ω0 + i 2
−i γ2
i γ2
2
− ω4 + ω02 − i µω
2
i γ2
0
0
−i γ2
i γ2
0
0
−i γ2
2
− ω4
+
ω02
0
+
i µω
2
0
2
− ω4 + ω02 − i µω
2
C3
C1
C̄1
C̄3
y calculando el determinante uno puede derterminar la relación crítica. En la figura
2.11, se ilustra esta relación y la también obtenida usando tres modos. En interesante
si uno continua usando más modos las curvas convergen a una curva común. La cual
tiene uno numéricamente se puede verificar y luego encontrar un muy buen acuerdo
= 0,
2.4. INTERACIÓN DE SOLITONES PARAMÉTRICOS
33
Figura 2.12: Interacción de solitones no propagativos hidrodiná micos a), b) en fase y c),d) en anti
fase.
con esta aproximación basada en este método de truncara de modos. Por lo tanto, uno
puede estudiar las inestabilidades paramétricas lejos de la condición resonante. Incluso
en el método anterior no se requiere que el sistema tenga una frecuencia resonante ya
que la curva esta bien definida.
Este método propuesto por E. Butikov [32] tiene la ventaja de transformar el problema dependiente del tiempo en uno de más variables a coeficientes independientes del
tiempo.
El resumen el fenómeno de resonancia paramétrica se basa en que si un sistema es
sometido a una frecuencia ω de forzamiento paramétrico y el responde a una frecuencia
subarmónica del forzamiento nω/2.
2.4.
Interación de solitones paramétricos
Como ya hemos mostrado los solitones disipativos son soluciones que tienen una
identidad en su forma (cf. a la expresión 2.12) y están caracterizados por una posición
la cual corresponde al máximo de su amplitud (ver figuras 2.7 y 2.9). Además, como
34 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
ya hemos mencionado hay dos tipos de solitones en fases y desfasados en medio periodo. Por lo tanto, la pregunta natural que emerge si este tipo de soluciones pueden
interactuar y si interactuan, cual es la ley de interacción. Estudios cualitativos de la
interacción entre solitones no propagativos hidrodinámicos han sido reportado en la
literatura [34, 35]. Motivados por la pregunta anterior recientemente hemos realizado
un estudio experimental sistemático y cuantitativo de la interacción de solitones no
propagativos hidrodinámicos en un canal angosto con agua [21, 36]. En la figura 2.12
se muestra un par de solitones interactuando en fase y en anti fase. Para entender, la
dinámica exhibida por este sistema consideraremos la interacción de un par de solitones
disipativos
2.4.1.
Interacción de un par de solitones
Para dar cuenta de la interacción consideraremos la representación polar de la ecuación
de schrodinger no-lineal forzada parametricaménte, ecuaciones 2.6 y 2.7, introduciremos
el siguiente ansatz que describe dos solitones interacutuando respectivamente en las
posiciones ∆/2 y −∆/2
!
∆(t)
∆(t)
R(x, t) = R+ x +
+ χR+ x −
2
2
+ρ(x, ∆),
θ(x, t) = θ0 + ϕ(x, ∆),
!
(2.23)
(2.24)
donde R+ da cuenta del modulo del soliton estable el cual esta definido en 2.12 y ∆(t)
da cuenta de la distancia entre solitones. Para dar adecuadamente cuenta de la interacción la posición de los solitones se ha promovido a una función y además como una
consecuencia de que las ecuaciones son no-lineales, cuando los solitones están suficientemente separados (∆ 1), el modulo y la fase se corrigen por pequeñas funciones
ρ(x, ∆) y ϕ(x, ∆) (ρ, ϕ 1). El parámetro χ da cuenta si los solitones están en fase
(χ = 1) o en anti-fase (χ = −1). En el límite que los solitones están bastante separados
(solitones diluidos), uno afecta exponencialmente al otro por medio de su cola que decae
2.4. INTERACIÓN DE SOLITONES PARAMÉTRICOS
35
asintoticaménte a cero. Luego, uno espera que la ∆(t) sea en este limite una variable
¨ ∆
˙ 1.
lenta temporal, es decir ∆
Por razones de simplicidad introducimos la notación
R+,+ (z+ ) = R+ (z+ ≡ x + ∆/2),
(2.25)
R+,− (z− ) = R+ (z− ≡ x − ∆/2),
(2.26)
W
= (R+,+ + χR+,− ) ,
(2.27)
donde z+ y z− son las coordenadas en los respectivos sistemas móviles. Introduciendo el
ansatz de un par de solitones (ecuaciones 2.23 y 2.24) en la ecuación (2.6) y linearizando
en ρ and ϕ, obtenemos después de unas pasos algebraicos directos
q
˙ ∆
∂z+ R+,+ − χ∂z− R+,− = W ∂xx ϕ + 2∂x W ∂x ϕ − 2 γ 2 − µ2 W ϕ.
2
(2.28)
Esta ecuación no depende de ρ, además esta ecuación se puede integrar por medio
del factor de integración W e integrando dos veces uno obtiene la siguiente relación
recursiva
ϕ=
Zx
√
dx0
−∞
0
x0
Zx
0 ˙ Zx
γ 2 − µ2 Z
dx
∆
2
.
R
R
−
χ∂
dyW
ϕ
(y,
t)
+
dyW
∂
+,−
+,+
z
z
−
+
W2
2W 2
−∞
−∞
−∞
(2.29)
Para poder resolver la ecuación anterior consideraremos el limite de la bifurcación saddle
node donde nacen los solitones (γ − µ 1), es decir el primer término del lado derecho
es pequeño. Luego en este límite podemos usar la aproximación de Born, y entonces
obtenemos
√
˙
ϕ = ∆Θ(x,
∆) + O( γ − µ),
(2.30)
con
Θ(x, ∆) ≡
Zx
−∞
x0
dx0 Z
dyW
∂
R
−
χ∂
R
z+ +,+
z− +,− .
2W 2
−∞
Por lo tanto, las correcciones de la fase al orden dominante en este límite son del orden
de las variaciones temporales de la distancia entre solitones.
36 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Luego hemos logrado obtener una adecuada aproximación de la fase. Para el modulo,
analogaménte, podemos introducir el Ansatz 2.23 en la ecuación (2.7) y linearizando
para ρ y ϕ, nosotros obtenemos
2
2
W ∂t ϕ = Lρ − 2µW ϕ − 3χR+,+
R+,− − 3R+,− R+,+
(2.31)
con
L ≡ −ν +
q
γ 2 − µ2 − 3 (R+,+ + χR+,− )2 − ∂xx .
(2.32)
Utilizando la aproximación para la fase (2.30), la ecuación anterior toma la forma
2
˙ − 3χR+,+
Lρ = −2µW (x)Θ(x)∆
(x)R+,− (x)
2
−3R+,− (x)R+,+
(x).
(2.33)
Dado que esta es una ecuación lineal, para imponer que hay solución, introducimos el
siguiente producto escalar en el espacio funcional de Hilbert
hf |gi =
Z∞
f (x)g (x) dx,
−∞
El operador lineal L es auto-adjunto (L = L† ). El kernel de este operador—conjunto
de funciones {v} que satisface Lv = 0—es de dimensión 2. Dado que L∂x R+,± ≈ 0
1/2
es exponencialmente pequeño (e−δ+
∆
), las funciones R+,± son seudo vectores propios
del kernel de L. Por lo tanto, el campo ρ tiene solución si se cumple (condición de
solubilidad)
D
E
D
E
2
2
˙ + ∂z+ R+,+ | 3χR+,+
h∂z+ R+,+ | 2µW Θi ∆
R+,− + ∂z+ R+,+ | 3R+,+ R+,−
= 0.
(2.34)
Un resultado equivalente obtenemos si usamos el otro elemento del kernel ∂z+ R+,−
para ∂z+ R+,+ . Dado que ∂z+ R+,+ es una funcción de orden uno cerca de la posición del
soliton R+,+ y que esta decae exponencialmente cerca de la posición del soliton R+,− ,
2.4. INTERACIÓN DE SOLITONES PARAMÉTRICOS
37
entonces el ultimo tt́ermino de la ecuación anterior es despreciable en comparación al
segundo, es decir,
D
˙ =−
∆
2
3χ ∂z+ R+,+ | R+,+
R+,−
E
,
2µ h∂z+ R+,+ | W Θi
(2.35)
donde
h∂z+ R+,+ | W Θi =
Z ∞
−∞
dz∂z R+,+ W (z)
Zx
−∞
Zx0
dx0
dyW (y)Λ(y),
2W 2 (x0 )
(2.36)
−∞
es un numero positivo por argumentos de simetría, Λ(y) ≡ ∂z+ R+,+ (y) − χ∂z− R+,− (y),
y
D
E
2
∂z+ R+,+ | R+,+
R+,− =
Z ∞
−∞
2
dz∂z R+,+ (z)R+,+
(z) R+,− (z + ∆) .
(2.37)
Con el objetivo de estimar la integrar anterior nosotros la evaluamos cerca de la posición
√
del soliton R+,+ , donde R+,− (z + ∆) ≈ 2δ+ e−δ+ (z+∆) y entonces
D
∂z+ R+,+ |
2
R+,+
R+,−
E
≈
q
−δ+ ∆
2δ+ e
Z ∞
−∞
2
dz∂z R+,+ (z)R+,+
(z) e−δ+ z .
(2.38)
Finalmente, obtenemos la ley de interacción de un par de solitones
˙ ≈ −Rχe−δ+ ∆ ,
∆
donde
(2.39)
√
R∞
2
3 2δ+ −∞
(z) e−δ+ z
dz∂z R+,+ (z)R+,+
R=
µ
R∞
−∞ dz∂z R+,+ W (z)
Rx
−∞
dx0
2W 2 (x0 )
Rx0
dyW (y)Λ(y)
−∞
es una constante positiva. Por lo tanto, la interacción entre dos solitones disipativos para
un medio forzado paramétricamente esta caracterizado por una interacción exponencial
como función de la distancia entre solitones. Esta interacción es atractiva (repulsiva)
cuando los solitones están en fase (anti fase), es decir, para χ = 1 (χ = −1).
Dada la simplicidad de la dinámica que describe la interacción entre solitones, si
uno considera una condicón inicial arbitraria, podemos integrar la ecuación anterior y
encontramos
−1
∆ (t) = δ+
ln [−χδ+ R (t − t0 )] ,
(2.40)
38 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.13: Interacción de solitones disipativos en la ecuación de Schrodinger no-linealde forzada
parametricamente 2.4. a) Diagrama espacio temporal del modulo R(x, t). b) Evolución temporal de la
distancia entre los solitones ∆(t).
donde t0 esta determinado por la condición inicial
t0 = χ
eδ+ ∆(t=0)
δ+ R
Por lo tanto, dos solitones disipativos que están en fase (anti-fase) se caracterizan por
una disminución (aumento) logarítmica de la distancia de separación soliton. La Figura 2.13 muestra la evolución temporal de la distancia entre solitones para dos solitones
disipativos en fase. Los puntos rojos dan cuenta de la posición de los solitones obtenidas
numéricamente y la curva continua es obtenida a partir de la formula (2.46). Es importante notar que esta expresión manifiesta un adecuado acuerdo, incluso para distancia
pequeñas donde el calculo pierde validez. En el caso (χ = 1) la expresiń anterior es solo
valida t ≤ τ ≡ −1/δ+ R + t0 , donde τ da cuenta del tiempo de colapso, es decir, el
instante en el cual ambos solitones se fusionan. Numericaménte, uno observa después
del colapso entre los solitones sobrevive solo un soliton. Además, este proceso de fusión
es acompañado por radiación en ambas direcciones, ver figura 2.13. Un proceso similar
es observado en la función de dos solitones en sistemas no integrales hamiltonianos [37].
En este contexto, el proceso auto-similar de fusión de solitones ha sido desarrollado
basado en una teoría estadística basada en argumentos entrópicos [38]. Es importante
notar que el proceso de interacción descrito solo toma en cuenta cuando los solitones
2.4. INTERACIÓN DE SOLITONES PARAMÉTRICOS
39
Figura 2.14: Interacción de solitones hidrodinámicos no propagativos en en una canal con agua forzado
verticalmente. Imagen instantánea de solitones en fase {a), b)} y en antifase {c), d)}, c) evolución
de la distancia de los solitones como función del tiempo. Los círculos azules son valores obtenidos
experimentalmente y la curva rojas es por medio del uso de la formula 2.46.
están distantes y luego el proceso de fusión no es descrito. En el caso que los solitones
estén en anti-fase (χ = −1), la ley de interacción de un par de solitones es valida para
t > t0 , donde el parámetro t0 esta relacionado a la condición inicial.
Recientemente en la Ref. [21], hemos verificado experimentalmente la ley de interacción de a pares, ecuación 2.39, en el caso de considerar dos solitones en fase o antifaces.
Los resultados muestran un adecuado acuerdo, lo cual enfatiza que un soliton disipativo
afecta exponencialmente al otro.
2.4.2.
dinámica auto similar de un gas de solitones
En el espacio de parámetro al interior de la lengua de Arnold, uno observa soluciones
periódicas. A partir de estas soluciones si uno se desplaza a la región de solitones
entonces estas soluciones se transforman en un gas de solitones los cuales comienzan a
interactuar. En la figura 2.15 se ilustra la evolución temporal de un gas de solitones.
Debido a la interacción los solitones se fusionan de apares, por lo tanto a medida que
evoluciona el tiempo los solitones que restan cada vez se van separando unos de otros
(ver figura 2.15). Luego, si el sistema fuera infinito la evolución del sistema sería estática,
40 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.15: Dinámica de interacción de gas de solitones. a) Siulación numérica de la ecuación de
Schrodinger no-lineal forzada parametricaménte. b) Representación esquemática de la interacción de
solitones disipativos.
pues permanentemente estaríamos en el estado de un gas de solitones interactuando que
se alejan, donde la única sensación seria que la evolución temporal seria cada vez mas
lenta. Debido al proceso anteriormente descrito, la interacción de solitones lejanos son
despreciable, ya que estos son exponencialmente suprimida por los solitones vecinos.
Luego la interacción de n-solitones esta dada por
żi =
X
(−1)Re−δ(zi −zi−j ) + Re−δ(zi+j −zi ) ,
(2.41)
j=1
donde zi es la posición del i-esimo soliton. Luego la interacción a primeros vecinos esta
dada por
żi = −Re−δ(zi −zi−1 ) + Re−δ(zi+1 −zi ) .
(2.42)
Esta ecuación es auto similar si consideramos la siguiente transformación de dilatación
en las coordenadas y en el tiempo:
zi+1 − zi−1 → zi+1 − zi−1 + h∆i0 ,
(2.43)
t → te3δh∆i0 /2 ,
(2.44)
es decir, si separamos los solitones disipativos la dinámica exhibida será simular a
aquella dado por los solitones disipativos sin separar, pero la escala temporal será
2.4. INTERACIÓN DE SOLITONES PARAMÉTRICOS
41
exponencialmente más peuqeña y el factor dependerá de la distancia de separación.
Luego uno espera encontrar leyes que caractericen la dinámica la evolución temporal de
la distancia promedio entre solitones. La distancia característica entre s solitones esta
dada por
Figura 2.16: Ley de la distancia promedio entre solitones o dinámica de dominios para a) la ecuación paramétrica de Schrodinger no-lineal, b) cadenas de péndulos forzado verticalmente, c) modelo
magéntico forzado.
42 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
X
(zi+1 − zi )
h∆(t)i =
i=0
N
,
(2.45)
con N el numero de solitones disipativos. La dinámica de esta función debes estar dada
por la interacción entre solitones, ecuación 2.42. Luego esta también debe ser invariante
por la ley de auto similitud, es decir
∆(t) → ∆(t) + h∆i0 ,
(2.46)
t → te3δh∆i0 /2 ,
(2.47)
Luego la uńica función que respeta este tipo de simetría es
h∆i = h∆i0 +
2
ln t,
3δ
(2.48)
Luego la distancia promedio a medida que evolucione el tiempo aumenta con una ley logarítmica. En la figura 2.16 se muestra la evolución temporal de la distancia de solitones
disipativos forzados parametricaménte para diversos sistemas. En la cual se encuentra
un cercano acuerdo entre la teoría y las simulaciones [39]. Experimentalmente, es complejo poder crear un gas de solitones para verificar la ley anterior. En el canal con agua
forzado verticalmente se observa al menos del orden de hasta cuatro solitones [39].
2.5.
Solitones en un medio inhomogéneo
Como hemos visto en las secciones anteriores, los solitones disipativos exhiben propiedades similares a las partículas. Una pregunta de interés que emerge naturalmente
es la posibilidad de poder manipular o controlar la posiciones de los solitones disipativos. Una forma intuitiva de generar que los solitones se propaguen es por medio de
quebrar la inavariancia de translación espacial, es decir, que el medio que sustenta los
solitones es inhomogeneo. Lo anterior se puede lograr considerando que los parámetros
seán inhomogeneos
µ → µ0 + µ1 (x),
2.5. SOLITONES EN UN MEDIO INHOMOGÉNEO
43
Figura 2.17: Diagrama espacio-temporal de los solitones disipativos en medios inhomegéneos obtenidos
mediante simulaciones numéricas de la ecuación de Schrodinger no-lineal forzada parametricaménte.
γ → γ0 + γ1 (x),
ν
→ ν0 + ν1 (x),
(2.49)
por motivos de simplicidad solo consideraremos que un solo parámetro es inhomogéneo, pero los resultados obtenidos son similares so consideramos los otros parámetros
inhomogeneos.
µ = µ0 + µ1 (x),
y los otros restantes son homogńeos. Por ejemplo, en el caso de una canal forzado
verticalmente un pequeño ángulo de inclinación del canal podría inducir una disipación
inhomogénea pequeña (µ1 (x) 1). Luego, las ecuaciones (2.6) y (2.7) toman la forma
∂t R = 2∂x R∂x θ + ∂xx θ − µR + γR cos(2θ) − µ1 (x)R,
R∂t θ = νR − R3 − ∂xx R + R(∂x θ)2 − γR sin(2θ).
(2.50)
Uno espera que para ángulos pequeños, los solitones disipativos son persistentes. Sin
embargo, la falta de homogeneidad genera dos efectos: (i) estados localizada son modificadas por la perturbación, se devienen en soluciones asimétricas, y (ii) el modo de
traslación espacial de los solitones disipativos—el modo Goldstone— adquiere una dinámica como resultado de la ruptura de la simetría traslacional. La Figura 2.17 muestra
44 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
el comportamiento típico de un solitón disipativo cuando uno considera una disipación
no homogénea que aumenta cuadraticamente con la posición. Por lo tanto la solitones
disipativos se mueve hacia la región de menor disipación. numéricamente, se observó
que la amplitud del solitón disipativo aumenta cuando se penetra en las regiones de
menor disipación.
Para tener en cuenta estos efectos, se considera la siguiente ansatz
R(x, t) = R+ (x − x0 (t)) + r(x, x0 ),
θ(x, t) = θ0 + ϕ(x, x0 ),
donde r(x, x0 ) y ϕ(x, x0 ) son funciones correctivas, respectivaménte. Además, nosotros
consideraremos que la variable x0 (t) es una variable temporal lenta, es decir, ẍ0 ẋ0 1, donde ẋ0 (t) son del orden de la perturbación. Introduciendo las expresiones anteriores
en el conjunto de ecuaciones (2.50) y linealizando en las perturbaciones después de
cálculos directos, uno encuentra
2∂x ϕ∂x R+ + ∂xx ϕR+ = 2γϕ sin(2θ0 )R+ + µ1 (x)R+
−∂z R+ ẋ0 ,
R+ ∂t ϕ =
h
(2.51)
i
2
ν − γ sin(2θ0 ) − 3R+
− ∂xx r +
−2γR+ cos(2θ0 )ϕ,
(2.52)
donde z ≡ x−x0 (t) es la coordenada en el sistema de referencia co-movil. Multiplicando
la ecuación (2.51) por el factor de integración R+ y después de cálculos simples uno
obtiene
ϕ(x) =
+
Z x
Z x
Z x
dx0 Z x0 00
00
2
0
(x
)
−
ẋ0 dx0
dx
µ
(x
)R
1
+
2
R+
(x0 )
2γ sin(2θ0 )dx0 Z x0 00
dx ϕ(x00 )R+ (x0 ),
2
R+
(x0 )
(2.53)
la cual es una integral de Fredholm para el campo ϕ(x) [40]. Para resolver la ecuación
√
integral anterior, nosotros consideraremos el límite γ sin(2θ0 ) = γ 2 − µ2 1, el cual
es equivalente a considerar una inyección y disipación de energía similar (γ ∼ µ). En
2.5. SOLITONES EN UN MEDIO INHOMOGÉNEO
45
base a este supuesto, podemos utilizar la aproximación
ϕ≈
Z x
dx0 Z
2
(x0 )
R+
x0
2
dx00 µ1 (x00 )R+
(x0 ) −
Z x
ẋ0 dx0 .
(2.54)
Es importante tener en cuenta que se puede calcular iterativamente las correcciones a
√
la aproximación anterior en una serie de potencias en el parámetro pequeño γ 2 − µ2
[40]. Introduciendo el operador lineal
2
L ≡ ν − γ sin(2θ0 ) − 3R+
− ∂xx ,
la ecuación (2.52) se puede rescribir como
Lr = R+ ∂t ϕ + 2γR+ cos(2θ0 )ϕ.
(2.55)
Para resolver esta ecuación lineal, se utiliza la alternativa de Fredholm. En consecuencia,
se introduce el siguiente producto interno
hf |gi =
Z∞
f (x)g (x) dx.
−∞
El operador lineal L es auto-adjunto L = L† . El kernel de este operador lineal es
de dimensión 1. Como resultado de la invariancia de translación espacial, uno tiene
L∂x R+ = 0, donde ∂x R+ s el modo de Golstone asociado a la invariancia de traslación
espacial. Luego el campo r tiene una solución si se satisface
0 = h∂x R+ | R+ ∂t ϕi + h∂x R+ | 2γR+ cos(2θ0 )ϕi .
(2.56)
Usando la aproximación (2.54), considerando los términos dominantes y después de
cálculos directos uno obtiene
R∞
ẋ0 =
−∞
dz∂z R+
R z dx0 R x0
R2
R ∞+
−∞
dx00 µ1 (x00 + x0 )R+ (x00 )
dzR+ z∂z R+
.
(2.57)
Esta ecuación da cuenta de la dinámica del soliton como consecuencia de la inhomogénidad. Es trivial por argumentos de paridad ver que, si µ1 (x) es una función par,
46 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
entonces no hay correcciones. Motivados por el experimento del canal con agua podemos considerar en el caso de un pequeño ángulo [41]
µ1 (x) = αx.
Entonces la formula (2.57) puede ser rescrita como
R∞
ẋ0 = α
−∞
R z dx0 R x0
dz∂z R+
R+
R∞
−∞
R∞
+αx0
−∞
dx00 x00 R+ (x00 )
dzR+ z∂z R+
dz∂z R+
R∞
−∞
R z dx0 R x0
2
R+
dx00 R+ (x00 )
.
dzR+ z∂z R+
(2.58)
Usando la expresión (2.23) y argumentos de paridad
R∞
ẋ0 ≈ α
−∞
dz∂z R+
R∞
R z dx0 R x0
−∞
R+
dx00 x00 R+ (x00 )
dzR+ z∂z R+
.
(2.59)
La integral anterior se puede estimar numéricamente, entonces obtenemos [41]
ẋ0 ≈ −
1,65327
α.
δ 3/2
En el límite en estudio el soliton se propaga con velocidad constante. Por lo tanto, si
uno considera una rampla la cual se puede cambiar α(t), entonces uno puede posicionar
donde uno quiera al soliton. Sin embargo, a medida que el soliton se propaga se va
modificando su forma y esto puede generar nuevas correcciones para la velocidad.
Figura 2.18: Evolución de soliton hidrodinámico en un canal inclinado. a) imagen instantánea y b)
diagrama espacio temporal.
2.6. SOLITONES DISIPATIVOS CON ARMADURA
47
Experimentalmente, se observa que el detuning es cuadratico (ver referencia [41]),
esto se debe a que los bordes del canal inducen una fuerza efectiva que obliga al soliton
propagarse al centro del recipiente. Este tipo de inhomogeneidad mas la inclinación
hacen que el soliton hidrodinámico tienda a realizar trayectorias de relajación a un
equilibrio. En la figura 2.18 se ilustra este tipo de trayectoria.
2.6.
Solitones disipativos con armadura
Recientemente, observaciones numéricas de solitones disipativos de la ecuación de
Schrodinger no-lineal forzada parametricaménte muestran que la fase tiene una estructura compleja [42, 43], los cuales serán denominados solitones disipativos con armadura.
En la figura 2.19a se ilustra el soliton disipativo estudiado en la secciones anteriores,
es decir, un soliton caracterizado por una forma de campana en el modulo de la amplitud y fase homogénea descrito por la formulas 2.12. En la figura 2.19b, se ilustra
las solitones disipativos con armadura. Estas soluciones están caracterizadas por una
estructura de campana similar para el modulo y una estructura con diferentes saltos
de fase. Estas soluciones fuerón descubiertas por simplemente perturbar el soliton di-
Figura 2.19: Solitones disipativos de la ecuación de Schrodinger no-lineal forzada parametricaménte.
a) solitones de fase homogénea, b) solitones disipativos con armadura.
48 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
sipativo y observar la evolución de su respectiva fase. Es importante mencionar que la
fase presenta una dinámica más lenta que el modulo. Inicialmente la fase exhibe transcientes complejos y posteriormente emerge dos frentes contraporpagativos que conecta
dos estados homogéneos que se propagan con una velocidad relativamente constante,
lejos del corazón o posición del soliton (que esta dado por la posición del máximo en
el modulo del soliton) y finalmente este frente se detiene dando origen a la solución
estacionaria que es el solitones disipativos con armadura. En la figura 2.20 se muestra
la evolución temporal de los frentes de fase contrapropagativos, donde se manifiesta la
velocidad como se propagan los frentes de fase contra propagativos.
2.6.1.
Descripción analítica
Con el objetivo de entender el origen de estos solitones, por motivos de simplicidad
consideraremos un sistema de coordenadas tales que la posición del soliton se encuentra
en el origen y solo consideraremos las coordenadas espaciales positivas, luego solo con-
Figura 2.20: Diagrama espacio temporal de los frentes de fase observados en la ecuación de Schrodinger
no-lineal forzada parametricaménte.
2.6. SOLITONES DISIPATIVOS CON ARMADURA
900 b)
R(x)
(x)
700
(x)
time
a)
1
49
1
0.5
500
0
0
300
−0.5
−1
−1
Space
100
0
100
200
300
400
50
150
x
250
350
Figura 2.21: Frente de fase de un soliton disipativo con armadura, a) perfil del frente de fase (linea
azul continua) y modulo (curva roja segmentada), b)diagrama espacio temporal del frente de fase.
sideraremos un solo frente de fase para entender la dinámica de los solitones disipativos
con armadura, naturalmente la otra mitad se entenderá por una extensión trivial del
análisis anterior. En la figura 2.21a es bosquejado el tipo de sistema de coordenada bajo
consideración. En este sistema de representación observamos que el frente emerge lejos
de la posición del soliton (ver 2.21a). Por lo tanto para la dinámica del frente de fase
el modulo se puede aproximar en esta región a
q
R(x ∆, x0 ) = 2 2δ+ e−f (x,x0 ) ,
(2.60)
ϕ(x) = ϕF (x − xf ),
(2.61)
y
donde xf da cuenta de la posición del frente de fase. Al orden dominante nosotros po√
demos considerar f (x, x0 ) ≈ δ+ (x − x0 ). En esta aproximación, R(x, x0 ) coincide con
el decaimiento exponencial de la solución estable soliton disipativo con fase homogénea. Sustituyendo el ansatz anterior en las ecuaciones de del modulo y fase, ecuaciones
(2.6) y (2.7), obtenemos dos ecuaciones diferentes. La primera nos permite obtener
analíticamente el perfil dominante del frente de fase. La segunda describe el comportamiento dinámico frente de fase, es decir describe la ecuación para el frente de fase. En
consecuencia, el perfil de fase se caracteriza por la ecuación
q
∂xx ϕF = 2 δ+ ∂x ϕF + µ − γ cos(2ϕF ).
(2.62)
50 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.22: Soliton con armadura, ilustración de los frentes de fase como curvas heteroclinas.
Introduciendo el siguiente potencial efectivo U (ϕF ) ≡ −µϕF + γ/2 sin(2ϕF ), la ecuación (2.62) puede ser escrita como una ecuación tipo Newton, la cual describe una
partícula en un potencial periódico con una fuerza constante, con un término de inyección de energía proporcional a la velocidad (∂x ϕF ), es decir,
q
∂U
∂xx ϕF = −
+ 2 δ+ ∂x ϕF .
∂ϕF
(2.63)
Luego, las soluciones de la ecuación anterior corresponden a soluciones estacionarias. En
particular los frentes de fase corresponden a soluciones heteroclinas. Los equilibrios uniformes de la ecuación 2.62 coinciden con los equilibrio de fase, es decir, cos(2ϕs ) = µ/γ
en el rango de interés −π to π. Por lo tanto, los frentes de fase representan soluciones homoclinas en el espacio {ϕ, ϕx }, el cual corresponden a órbitas que conecta un
equilibrio de la ecuación de Newton con otro (2.63) (ver Fig. 2.22).
√
Introduciendo el siguiente cambio de variable x = 2 δ+ x0 en la Ec. 2.63, uno puede
considerar la siguiente serie asintótica
ϕF (x) = ϕ0 + Γϕ1 (x) + Γ2 ϕ2 (x) + · · · ,
2.6. SOLITONES DISIPATIVOS CON ARMADURA
51
Figura 2.23: familia de solitones con armadura. Las curvas segmentadas dan cuenta de la amplitud y
las curvas continuas dan cuenta de las diferentes estructuras de fase.
con Γ ≡ 1/4δ 1, la cual al orden dominante tiene la siguiente forma analítica
ϕF (x, xf ) ≈ ϕ0 =
fsol ,
fsol = arctan
h
fsol + π,
donde
"s
h
fsol − π,
γ±µ
tanh
γ∓µ
√
−π, − π2
− π2 , π2
h
π
,π
2
#
γ 2 − µ2 (x − xf )
√
.
2 δ+
(2.64)
Es importante notar que los frentes de fase están parametrizado por el parámetro xf .
Figura 2.21a muestra el frente de fase calculado numericaménte, el cual tiene una diferencia de 1 % con respecto a la anterior expresión analítica. Si uno considera las
√
correcciones ϕF ≈ ϕ0 + ∂x ϕ0 /4 δ la diferencia se reduce a un 0.8 %.
Teniendo en cuenta el dominio completo del soliton, obtenemos las ocho posibles
configuraciones de solitones con armadura que hemos observado anteriormente en simulaciones numéricas. En la figura 2.23 se ilustra la familia de diferentes solitones con
armadura.
Un análisis más meticuloso de simulaciones numéricas revela que los solitones con
armadura están constituidos por dos regiones cualitativamente diferentes: las regiones
interior y exterior. Las regiones interior y exterior se destacan por la parte central
y asintótica del soliton con armadura, respectivamente. Tenga en cuenta que la fase
52 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.24: Estructura del soliton con armadura. La imagen superior de cuenta de la estructura de
fase y la inferior da cuenta del logaritmo de la amplitud. Lo cual permite desvelar la estructura del
soliton. Las curvas punteadas dan cuenta de los dos comportamientos asintóticos de los solitones con
fase uniforme.
asintótica de los solitones con armadura en las regiones interior y exterior coincide
con la fase de los solitones con fase homogénea estables e inestables, respectivamente
(véase la figura 2.24.). Por lo tanto, los solitones con armadura se puede entender como
un soliton construido por la (zona interior) estable y la inestable (zona exterior) de
soluciones de solitones con fase homogénea.
Con el objetivo de ilustrar esta afirmación la fig. 2.24 muestra el logaritmo del
modulo de los solitones con armadura como función del espacio. Claramente, hay una
región intermedia entre las dos tasas de decaimiento exponencial de los solitones con
fase homogénea que se caracteriza por un punto de transición. Este punto describe la
2.6. SOLITONES DISIPATIVOS CON ARMADURA
53
transición entre las regiones de interior y exterior y corresponde a la posición central
frente de fase xf . Por lo tanto, la tasa de decaimiento exponencial f (x, x0 ) de los los
solitones con armadura debe ser modificado por
f (x, x0 ) ≈
q
δ+ (x − x0 ) + B(x, xf )
(2.65)
con
B(x, xf ) ≡
q
δ− −
q
δ+ Θ(x − xf )(x − xf )
(2.66)
donde Θ(x − xf )da cuenta de la función escalón. Es importante notar que la función
f (x, x0 ) es una función suave. Sin embargo, la aproximación (2.65) es continuo pero no
es diferenciable en x = xf .
Usando el ansatz correguido 2.65, en las ecuaciones (2.62-2.63) uno puede re-obtener
los resultados anteriores en la región interior y exterior. En la región interior, las Ecs.
(2.62-2.63) permanecen no modificadas. Por otro lado, estas ecuaciones son modificadas
por medio de remplazar δ+ por δ− en la región exterior. Siguiendo el procedimiento mostrado anteriormente uno encuentra después de cálculos directos la siguiente expresión
para el frente de fase,
"s
ϕ0 (x) = arctan
γ±µ
tanh
γ∓µ
√
γ 2 − µ2 (x − xf )
2δ(x, xf )
#
(2.67)
con
δ(x, xf ) ≡
q
q
δ+ + ( δ− −
q
δ+ )Θ(x − xf ) .
(2.68)
En esta aproximación los frentes de fase son continuos pero no diferenciable en x = xf .
Enfatizando que los solitones de armadura es constituidas por el estable e inestable
soliton de fase homogénea.
Es importante tener en cuenta que ansatz (2.60) considera una tasa de decaimiento
exponencial uniforme del módulo. Este supuesto, al orden dominante, para obtener
soluciones frente de fase (fórmula 2.64). Correcciones de orden superior nos permiten
obtener una descripción mejorada del soliton con armadura de fase en la que el módulo
también presenta una estructura de blindaje en la amplitud (véase la figura 2.24). Sin
54 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
embargo, esta estructura se suprime de manera exponencial en comparación con la
√
altura soliton 2δ+ , por varios ordenes de magnitud en las simulaciones numéricas se
observan al menos de 50 ordenes de magnitud. Por el contrario, la estructura de fase
es de orden uno. Por lo tanto, una posible caracterización experimental de los solitones
con armadura debe lograrse por medio de mediciones de fase.
2.6.2.
Dinámica de fase
Como se discutió en la sección anterior, el comportamiento transitorio anterior a
la formación del frente de fase se rige por la dinámica de los frentes de fase. Aquí
proponemos un estudio analítico de la evolución dinámica de estos frentes. Para ello
vamos a considerar la evolución típica de un soliton en un sistema semi infinito, como se
muestra en la figura 2.21b. Como puede verse a partir de esta figura, el frente muestra un
comportamiento dinámico que se caracteriza por un movimiento no trivial. En aras de
la simplicidad, consideremos el ansatz (2.60)-(2.61) al orden dominante que f (x, x0 ) ≈
√
δ(x − x0 ) y δ ≡ δ+ . Reemplazando en la ecuación (2.7), se obtiene la ecuación de la
posición del frente,
√
− ẋf ∂x ϕF = −(ν + δ) − 8δe−2
δx
+ (∂x ϕF )2 − γ sin(2ϕF ),
(2.69)
Con el objetivo de derivar la dinámica del frente de fase xf (t), uno permite que la
posición del frente de fase sea promovida a una función temporal. La derivada temporal
de xf esta dada por ẋf . Uno asume que esta variable xf es una variable lenta.
Multiplicando la ecuación anterior por ∂z ϕF (z) con z ≡ x − xf , y introduciendo el
siguiente producto interno hf |gi ≡
R
f gdz, se obtiene después de los cálculos sencillos,
una ecuación diferencial ordinaria para la posición del frente de fase,
√
ẋf = A + Be−2
donde
δxf
D
A≡
,
(ν + δ + γ sin(2ϕF ) − (∂z ϕF )2 )|∂z ϕF
h∂z ϕF |∂z ϕF i
(2.70)
E
,
2.6. SOLITONES DISIPATIVOS CON ARMADURA
55
y
D
B ≡ 8δ
√
e−2
δz
|∂z ϕF
E
h∂z ϕF |∂z ϕF i
.
{A, B} son números reales, que puede ser positivo o negativo dependiendo de la forma
del frente de fase.
Por ejemplo, cuando se considera un frente de fase que aumenta monótonamente con
la coordenada espacial, A (B) tiene un valor negativo (positivo) constante. El término
proporcional a A en la ecuación cinemática para la posción del frente (ec. 2.70) representa la velocidad constante a la cual fase de mayor valor invade al más pequeño dando
lugar a un frente de fase que se propaga hacia la posición del soliton x0 . Esta velocidad puede ser entendida como una consecuencia de la diferencia de energía potencial
efectivo (U (ϕF )) entre ambos equilibrios. En contraste, el término proporcional a B da
cuenta del efecto de la variación espacial de la cola del soliton en la amplitud o modulo,
que induce una fuerza que conduce a los frentes de fase a que se alejan de la posición de
la soliton. Por consiguiente, la superposición de estas dos fuerzas antagónicas genera un
equilibrio estable de la posición de la frente de fase, lo cual es consistente con el comportamiento dinámico ilustrado por el diagrama espacio-temporal de la figura 2.21b.
Resolviendo la ecuación (2.70), se obtiene una solución analítica para la trayectoria
típica,
√
log B
log e−2 δA(t−t0 ) − 1
A
√ +
√
xf (t) =
− A(t − t0 ).
2 δ
2 δ
(2.71)
La curva segmentada mostrada en la figura 2.21b es obtenida usando la fórmula anterior
donde A and B son usados como parámetros de ajuste. Es importante notar que la cons√
tante log (B/A) /2 δ describe la posición de equilibrio del frente, el cual corresponde
al tamaño característico de la estructura de carcaza en la fase. Para las correcciones de
orden superior de la fase, se obtiene una expresión similar para la dinámica del frente
de fase.
56 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
2.6.3.
Estabilidad de solitones con fase homogénea
Como ya hemos demostrado los solitones, de fase uniforme y con estructura de fase,
son soluciones de la ecuación de Schrodinger no lineal forzada parametricamente (2.4).
Por lo tanto, una pregunta natural que surge es: cuáles son los escenarios de bifurcación
de estas soluciones? Con el objetivo de examinar esta cuestión, uno puede realizar un
análisis de estabilidad lineal numérica similar aquello realizado en la Ref. [24]. Dada
la complejidad del operador lineal, un análisis de estabilidad analítica no es asequible.
Consideramos que una pequeña perturbación ρ y Ω torno a la solución de Rs (x) y ϕ0 ,
respectivamente, es decir,
R = Rs (x) + ρ(x, t) and ϕ = ϕ0 + Ω(x, t),
(2.72)
donde ρ, Ω 1. Remplazando en (2.6), (2.7) y linearizando, uno obtiene
q
∂t ρ = 2∂x Rs ∂x Ω + Rs ∂xx Ω + 2 γ 2 − µ2 ΩRs ,
(2.73)
Rs ∂t Ω = δρ − 3Rs2 ρ − ∂xx ρ − 2µRs Ω,
(2.74)
y
respectivamente. La ecuación anterior se puede rescribir de la siguiente forma
˙
ρ
Ω
ρ
=M
Ω
(2.75)
donde
M ≡
0
1
(δ
Rs (x)
− 3Rs (x)2 − ∂xx )
√
2∂x Rs (x)∂x − Rs (x)∂xx − 2Rs (x) γ 2 − µ2
−2µ
(. 2.76)
Soluciones analíticas de la ecuación 2.75 es una compleja tarea [24]. Por lo tanto,
uno debe usar como estrategia de estudio el análisis numérico, es decir, por medio
de métodos numérico uno debe determinar el conjunto de valores propios (espectro).
Luego para calcular este espectro uno procede a discretizar el espacio, x → j∆x,
F (x, t) → F (j∆x, t) ≡ Fj (t) con j = 1, · · · , N donde N es el nḿuero de puntos considerado en el sistema y L = N ∆x. Por lo tanto, el operador diferencial M se deviene
2.6. SOLITONES DISIPATIVOS CON ARMADURA
57
en una matriz de rango N 2 . Además, uno puede considerar µ = µ0 y x0 = L/2 para
diferentes valores de {γ, ν} en la región de existencia de solitones, es decir, γ 2 ≤ ν 2 + µ2
and ν < 0.
El parámetro-L controla el tamaño del del sistema y da cuenta de los efectos espaciales. Cambiando N con ∆x fijo, podemos fácilmente modificar este parámetro. En
muchos estudios este parámetro no ha considerado como un parámetros de sistema
relevantes, siendo por lo general un numero pequeño constante. Veremos que el parámetro L desempeña un papel principal en las propiedades de estabilidad de los estados
disipativos localizados.
Por lo tanto, vamos a considerar, L como parámetro de control del sistema y fijo
los parámetros {µ, ν, γ}. Cuando L es lo suficientemente pequeño como el espectro se
caracteriza por estar centrada sobre un eje paralelo al imaginario, donde cada valor
Figura 2.25: (color online) La parte real del valor propio más grande Max(Re(λ)) (puntos rojos) y auto
valores relacionados al modo de Goldstone (triángulos azules) como función del tamaño del sistema.
Las figuras insertadas A, B y C son el espectro del soliton con fase homogénea antes (L = 284),
durante (L = 304) y despues (L = 324) de la bifurcación, respectivamente, para γ = 0,105, µ = 0,1, y
ν = −0,05.
58 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
propio tiene parte real negativa. Este tipo de comportamiento de los valores propios
es típico de los sistemas cuasi-reversibles [18]. Aumentando L, el conjunto de valores
propios comienzan a chocar y dan origen a la creación de un conjunto continuo. Hasta
un valor crítico de Lc , donde algunos de ellos cruzan el eje imaginario en una frecuencia
diferente de cero, mostrando una bifurcación Andronov-Hopf [44, 45]. En la figura 2.25
se describe el espectro antes, durante y después de la bifurcación, respectivamente. En
esta figura se ilustra la parte real de la mayor auto valor máx [Re(λ)] (puntos rojos)
y el valor propio relacionado con el modo de Goldstone (triángulos azules) en función
del tamaño del sistema L. Como consecuencia de la invariancia de translación, el valor
propio relacionado a el modo de Goldstone está en el origen del plano complejo [?].
Para γ = 0,105, µ = 0, 1 y ν = −0, 05, se observa que (ver fig. 2.25 recuadro A) por
debajo el valor crítico Lc = 304, el valor propio más grande corresponde al modo de
Goldstone. Cerca de la bifurcación, el valor propio conmayor parte real y su respectivo
conjugado cruza el eje real, dando origen a la desestabilización de la solución de fase
uniforme (véase la fig. 2.25).
El análisis de la estabilidad numérica de de solitones con fase uniforme revela una
fuerte dependencia del tamaño del sistema. Este resultado está de acuerdo con la región
de cruce interior y exterior. La región interior tiene una longitud definida por el conjunto
dado de parámetros del sistema {µ, ν, γ}. Si el tamaño del sistema es lo suficientemente
pequeño (L menor que el tamaño de la región interior), no se produce el cruce. Entonces,
el soliton con estructura de fase no energe y el soliton con fase uniforme es la única
solución estable. Para L mayor que el tamaño de la región interior, el soliton de fase
uniforme se desestabiliza por una bifurcación oscilatoria, generando la emergencia de
solitones con estructura de fase.
Dado que el decaimiento exponencial de los solitones con fase uniforme estables,
y por lo tanto la longitud de la región interior, es una función de los parámetros del
sistema {µ, ν, γ} es natural inferir que la variación de dichos parámetros con L fijo,
pueden generar la desestabilización de los solitones con fase uniforme. En efecto, a raíz
de la estrategia anterior, llevamos a cabo un análisis de la estabilidad numérica de
2.6. SOLITONES DISIPATIVOS CON ARMADURA
59
Figura 2.26: (color online) La parte real del valor propio más grande Max(Re(λ)) (puntos rojos) y el
valor propio relacionado con el modo de Goldstone (triángulos azules) como función de la amplitud de
forzamiento γ. A, B y C son los respectivos espectros del soliton de fase uniforme antes (γ = 0,1065),
durante (γ = 0,1090) y después (γ = 0,1115) de la bifurcación, para µ = 0,1, y ν = −0,05 con L = 280
fijo.
estas soluciones variando γ para L fijo con µ = 0, 1 y ν = −0,05. Elegimos la misma
región parámetro {νγ} con L = 280 (antes de la bifurcación generada por el cambio
del tamaño de sistema, ver fig. 2.26) para asegurar que el soliton con fase uniforme
es estable. La figura 2.26 muestra la evolución valor propio como función de γ. Al
igual que antes, hasta un cierto valor crítico de γc , el sistema exhibe una bifurcación
de Andronov-Hopf, que conduce a la aparición de solitones con estructura de fase. El
escenario de bifurcación es similar aquel observado cambiando el tamaño del sistema.
En resumen, el mecanismo de la inestabilidad anterior es un fenómeno robusto. La
figura 2.27 muestra la estabilidad de los solitones de fase uniforme sobre una región
de parámetro {ν, γ} con µ = 0, 05 y L = 400 fijo. Para un sistema de tamaño más
pequeño que el crítico, se observa que para los parámetros 0 < γµ 1, el solitón con
fase constante es estable. No obstante, el aumento de la amplitud del forzando γ o el
60 CAPÍTULO 2. SOLITONES DISIPATIVOS EN SISTEMAS PARAMÉTRICOS
Figura 2.27: (color online) PSS bifurcation diagram in the γ − ν space obtained from solving 2.75
numerically for µ = 0,050 and L = 400.
parámetro de desintonización ν, el solitón se desestabiliza de nuevo por una bifurcación
Andronov-Hopf.
En el caso de que el tamaño del sistema es lo suficientemente grande, el soliton
de fase uniforme exhibe una bifurcación Andronov-Hopf que conduce a un soliton con
armadura. Aumentando aún más los parámetros del sistema {ν, γ} una bifurcación secundaria conduce a un comportamiento periódica como aquellos observados en [46]. Por
el contrario, para las pequeños L la bifurcación Andronov-Hopf conduce directamente
a solitones periódicos localizados sin una bifurcación secundaria.
2.6.4.
Solitones con armadura en dos dimensiones
Capítulo 3
Estructuras localizadas entre estados
homogéneos
61
62CAPÍTULO 3. ESTRUCTURAS LOCALIZADAS ENTRE ESTADOS HOMOGÉNEOS
Explicar soluciones localizadas solitarias
Bibliografía
[1] L.D. Landau, M.E. Lifshitz. Course of theoretical Physics. Volume 9: Statistical
Physics; Part 1. (Oxford, Singapore, 1980).
[2] L.D. Landau, M.E. Lifshitz, Course of Theoretical Physics: Fluid Mechanics, Volume 6.
[3] E. Fermi, J. Pasta, S. Ulam, Studies of Nonlinear Problems. Document LA-1940
(1955).
[4] V.I. Arnold, Mathematical Methods of Classical Mechanics (Springer, 1989).
[5] N. J. Zabusky and M. D Kruskal,Ïnteractions of solitons in a collisionless plasma
and the recurrence of initial states". Phys. Rev. Lett. 15 240Ð243 (1965).
[6] J. Boussinesq, Essai sur la theorie des eaux courantes, Memoires presentes par
divers savants Acad. des Sci. Inst. Nat. France, XXIII, 1-670 (1877).
[7] D.J Korteweg, G. de Vries, Philosophical Magazine 39, 422Ð443 (1895).
[8] A. Frova and M. Marenzana, Thus Spoke Galileo: The Great ScientistÕs Ideas and
their Relevance to the Present Day (Oxford University Press, 2006).
[9] L.D. Landau and E.M. Lifshiftz, Mechanics, Volume 1 (Course of Theoretical Physics) (Pergamon Press, 1976).
[10] M.G. Clerc, C. Falcon, C. Fernandez-Oto and E. Tirapegui, EPL, 98, 30006 (2012).
63
64
BIBLIOGRAFÍA
[11] G. Nicolis and I. Prigogine, Self-Organization in Non Equilibrium Systems (J. Wiley & Sons, New York, 1977).
[12] J. Wu, R. Keolian, and I. Rudnick, Phys. Rev. Lett. 52, 1421 (1984).
[13] O. Lioubashevski, H. Arbell, and J. Fineberg, Phys. Rev. Lett. 76, 3959 (1996).
[14] P. B. Umbanhowar, F. Melo, and H. L. Swinney, Nature, 382, 793 (1996).
[15] O. Lioubashevski, Y. Hamiel, A. Agnon, Z. Reches, and J. Fineberg, Phys. Rev.
Lett. 83, 3190 (1999).
[16] M.G. Clerc, U Bortolozzo and S Residori, New J. Phys. 11, 093037 (2009).
[17] V. I. Arnold, Geometrical Methods in the Theory of Ordinary Differential Equations
(Springer, NY, 1983).
[18] M. Clerc, P. Coullet, and E. Tirapegui, Phys. Rev. Lett. 83, 3820 (1999); Opt.
Commun. 167, 159 (1999); Prog. Theor. Phys. Suppl. 139, 337 (2000); Int. J. Bifurcation and Chaos 11, 591 (2001).
[19] M.G. Clerc, S. Coulibaly and D. Laroze, Int. J. Bifurcation Chaos 19, 3525-3532
(2009).
[20] J.W. Miles, J. Fluid Mech. 148, 451 (1984).
[21] M.G. Clerc, S. Coulibaly, N. Mujica, R. Navarro, and T. Sauma Phil. Trans. R.
Soc. A 367, 3213 (2009).
[22] B. Denardo, B. Galvin, A. GreenÞeld, A. Larraza, S., Putterman, and W. Wright,
Phys. Rev. Lett. 68, 1730 (1992).
[23] S Longhi, Phys. Rev. E 53, 5520 (1996).
[24] I. V. Barashenkov, M.M. Bogdan, and V.I. Korobov, Europhys. Lett. 15, 113
(1991).
BIBLIOGRAFÍA
65
[25] M. G. Clerc, S. Coulibaly, and D. Laroze, Phys. Rev. E. 77, 056209 (2008); Physica
D 239, 72 (2010).
[26] J. Garay, I. Ortega, M. G. Clerc, and C. Falcon Phys. Rev. E 85, 035201(R) (2012).
[27] A. C. Newell, Solitons in Mathematics and Physics (Society for Industrial and
Applied Mathematics, Philadelphia 1985).
[28] J. Miles, J. Fluid Mech 83, 153 (1977).
[29] O. Descalzi, A. Argentina, E. Tirapegui, Phys. Rev. E, 67, 015601 (2003)
[30] X. Wang and R. Wei, Phys. Rev. E 57, 2405 (1998).
[31] Leonardo Gordillo, Tesis de Doctorado, "Non-propagating hydrodynamic solitons in a quasi-one dimensional free surface subject to vertical vibrations",
http://www.tesis.uchile.cl/handle/2250/112129
[32] E. I. Butikov, J. Phys. A 35, 6209 (2002); Am. J. Phys. 69, 755 (2001).
[33] P. Holmes, J. L. Lumley, and G. Berkooz, Turbulence, Coherent Structures, Dynamical Systems and Symmetry (Cambridge University Press, Cambridge, 1998).
[34] X. Wang, and R. Wei, Phys. Rev. Lett. 78, 2744 (1997).
[35] X. Wang, and R. Wei. Phys. Lett. A 227, 55Ð60 (1997).
[36] Tania Sauma, Tesis de Magister, INTERACCION Y CARACTERIZACION DE ESTRUCTURAS LOCALIZADAS EN SISTEMAS NO LINEALES,
http://www.dfi.uchile.cl/marcel/DatosPersonales.html
[37] S. Dyachenko, V.E. Zakharov, A.N. Pushkarev, V.F. Shvets, and V.V. Yankov,
Sov. Phys. JETP 69, 1144Ð1162 (1989).
[38] B. Rumpf, and A.C. Newell, Physica D 184, 162Ð191 (2003).
66
BIBLIOGRAFÍA
[39] M.G. Clerc, S. Coulibaly, L. Gordillo, N. Mujica, and R. Navarro, Phys. Rev. E
84, 036205 (2011).
[40] G. Arfken, H. Weber, Mathematical Methods for Physicists (Elsevier Academic
Press, Burlington, 2001).
[41] L. Gordillo, T. Sauma, Y. Zarate, I. Espinoza, M.G. Clerc and N. Mujica), Eur.
Phys. J. D 62, 39-49 (2011).
[42] M.G. Clerc, S. Coulibaly, M.A. Garcia-Nustes, and Y. Zarate, Phys. Rev. Lett.
107, 254102 (2011).
[43] M.G. Clerc, M. A. Garcia-Nustes, Y. Zarate, and S. Coulibaly Phys. Rev. E. 87,
052915 (2013).
[44] S. H. Strogatz, Nonlinear Dynamics and Chaos: With Applications to Physics,
Biology, Chemistry and Engineering (Addison Wesley, Reading, Mass, USA, 1994).
[45] J. Hale and H. Kocak, Dynamics and Bifurcations (Texts in Applied Mathematics.
Springer-Verlag, New York, 1991).
[46] M. Bondila, I. V. Barashenkov, and M. M. Bogdan, Physica D 87, 314 (1995).