revision matematica de las hipotesis del modelo neoclasico del
Anuncio

REVISION MATEMATICA DE LAS HIPOTESIS
DEL MODELO NEOCLASICO DEL CONSUMIDOR
R.Barbolla y P. Sanz
Dpto. Análisis Económico: Economía Cuantitativa
Facultad de Ciencias Económicas y Empresariales
Universidad Autónoma de Madrid. Cantoblanco 28049 MADRID
91-3974840, 91-3974825
rosa.barbolla@uam.es, paloma.sanz@uam.es
Un problema clásico de la Economía matemática es demostrar la existencia de
equilibrio competitivo; es decir determinar la asignación preferida por el individuo que
elegirá dentro de su conjunto presupuestario a unos precios y renta dados. Si se
considera que las preferencias del consumidor vienen reflejadas por una función de
utilidad, la formulación matemática de la situación a la que se enfrenta el consumidor es
la resolución de un problema de optimización. En este trabajo se analizan las hipótesis
matemáticas en las que, a partir de la solución de este problema, se puede garantizar la
existencia, continuidad y diferenciabilidad de las funciones de demanda. Se estudia el
alcance y significado de las hipótesis de crecimiento y estricta cuasiconcavidad de la
función de utilidad, claves para establecer la existencia de las funciones de demanda, asi
como la importancia de la no nulidad del hessiano orlado de la función de utilidad, que
es indispensable para poder obtener funciones de demanda diferenciables.
1. INTRODUCCIÓN.
En Economía Matemática un problema clásico es demostrar la existencia del
equilibrio competitivo; es decir, determinar la asignación preferida por el individuo que
elegirá dentro de su conjunto presupuestario a unos precios y renta dados.
Para ello, se considera que las necesidades del individuo están expresadas por una
función de utilidad u que vendrá explicada por las cantidades de los bienes que éste
puede consumir. En esta situación, si el consumidor dispone de una cantidad de dinero
dada, que gastará en adquirir cantidades de mercancías cuyos precios están fijados en el
mercado, elegirá las cantidades de bienes que puede adquirir dentro de sus posibilidades
presupuestarias, de manera tal que, con su elección maximice su utilidad. Así pues, si se
supone que R es la renta fija de la que dispone el individuo, con la cual puede comprar
cantidades xi de n bienes i=1,...,n a precios pi i=1,...,n dados por el mercado, entonces
el problema de optimización que el consumidor habrá de resolver es
max u ( x1 ,..., xn )
n
s.a. ∑ i =1 pi xi ≤ R
x = ( x1 ,..., xn ) ∈ X
1
donde por u ( x1 , x 2 ,..., x n ) se denota su función de utilidad, por X el conjunto de
combinaciones de bienes admisibles y siendo el vector de precios p = ( p1 ,..., p n ) > 0 y
la renta R > 0 .
Ahora bien, bajo el supuesto de insaciabilidad local, una combinación x
maximizadora de la utilidad debe cumplir la restricción presupuestaria con igualdad, por
tanto, se considera representado formalmente, el comportamiento del consumidor en
términos matemáticos por
max u ( x1 ,..., x n )
n
s.a. ∑i =1 p i xi = R
( P)
x = ( x1 ,..., x n ) ∈ X p > 0, R > 0
Cuando el problema (P) tiene solución x * , y ésta es única, es posible definir la
cantidad demandada del bien en función de los precios p y la renta R. Por otra parte,
una vez conocidas las funciones de demanda también puede ser interesante saber como
se ven afectadas las demandas de los bienes cuando varían sus precios o la renta en un
mercado competitivo.
El análisis de este modelo económico y su resolución han sido abordados con
frecuencia en la literatura económica, siendo las hipótesis habituales las siguientes:
El conjunto admisible X es convexo, cerrado y acotado inferiormente,
coincidiendo en muchas ocasiones con n+ .
- La función u, definida de X en
se la considera C2, y estrictamente
cuasicóncava en X.
El hessiano orlado de la función u en la solución óptima x * del problema de
optimización (P) debe tener determinante no nulo.
Cuando un estudioso de formación muy teórica revisa por primera vez esta
literatura, puede parecerle a primera vista que algunas de las hipótesis tienen
exclusivamente contenido económico. Sin embargo, al realizar una lectura más
profunda, esta impresión se desvanece y, como se pone de manifiesto en algunas
demostraciones, se ve la necesidad de imponerlas como hipótesis matemáticas. Por
ello, en este trabajo se analiza el alcance de cada una de las hipótesis que se efectúan,
tanto sobre la función u como en el conjunto admisible X y su influencia en cada paso
de aproximación a la solución del problema.
En relación a esto, podemos destacar que las restricciones impuestas sobre el
conjunto admisible X y suponer que u es dos veces diferenciable con continuidad, es
decir C2, son condiciones bastante lógicas dado el marco del problema de optimización
que se está considerando.
El carácter creciente, en sentido fuerte, de la función u es también un requisito
razonable tanto desde el punto de vista económico como matemático. En la literatura
económica esta hipótesis se garantiza exigiéndole a u la condición suficiente de poseer
todas las utilidades marginales estrictamente positivas en cada punto de X. Esta
condición es exigente en exceso, pues basta con suponer la no negatividad del vector ∇u
y que éste al menos tenga una componente no nula para obtener resultados análogos, en
cuanto a crecimiento.
2
Las propiedades de concavidad impuestas sobre la función u repercuten en la
unicidad y globalidad de la solución del problema de optimización (P) siendo éste un
requisito indispensable para asegurar la existencia de las funciones de demanda. Al
analizar los diferentes conceptos de concavidad de una función u y lo que éstas implican
en el contexto de la optimización matemática, se observa que la condición de estricta
cuasiconcavidad de la función u es la más débil de las que permiten asegurar que el
problema tiene solución única global.
La hipótesis de estricta cuasiconcavidad de la función u incide en las
propiedades de convexidad de los conjuntos Ωα = {x ∈ X / u ( x ) ≥ α } y la estructura de
Sα = {x ∈ X / u ( x ) = α } . En concreto, se verifica que cuando u es de esta clase de
funciones los conjuntos Sα no pueden contener segmentos planos y los Ωα son
estrictamente convexos para todo α.
El carácter definido negativo de la forma cuadrática q ( z ) = z ' Hu ( x ) z en el
conjunto M = {z ∈ n / z ∇u ( z ) = 0} es una condición suficiente de segundo orden para
la estricta cuasiconcavidad de u. Esta condición, siempre que ∇u ( x ) ≠ 0 es equivalente
~
a que los menores principales de orden r=3,4,...,n+1 de la matriz Hu ( x ) sean
alternativamente positivos y negativos. Así pues, cuando esto se verifica la función u
cumple también la tercera de las hipótesis que antes enumeramos, es decir, el
determinante de su hessiano orlado en x * es diferente de cero.
~
Este valor no nulo de | Hu ( x * ) | es, como demuestra Katzner(1968) una
condición necesaria y suficiente para que las funciones de demanda sean diferenciables.
~
Ahora bien, la no nulidad del determinante de la matriz Hu ( x * ) es una exigencia muy
restrictiva, pues este comportamiento del hessiano orlado no está garantizado, ni
siquiera para funciones estrictamente concávas. De hecho, esta propiedad sólo la
verifican las funciones fuertemente cuasicóncavas definidas por Barten y Böhm(1982),
a partir de la condición de segundo orden antes enunciada.
Desde un punto de vista geométrico (n=2) la no nulidad del determinante
~ *
| Hu ( x ) | , significa que el radio de curvatura de u ( x ) = u ( x * ) en x * es infinito, es
decir, la curva de nivel u ( x ) = u ( x * ) es "casi plana" en un entorno de x * . En general,
este concepto para n>2 se traduce en que la superficie de indiferencia tiene curvatura
gaussiana nula en x * , es decir que en un entorno de x * , la hipersuperficie u ( x ) = u ( x * )
"casi no se aleja" del hiperplano tangente a u ( x ) = u ( x * ) en el punto x * .
2. CONCEPTOS PREVIOS.
2.1. CONCAVIDAD Y CONCAVIDAD DÉBIL DE FUNCIONES.
Dada la relevancia que tiene la característica de "concavidad" de la función
objetivo del problema que en este trabajo se analiza empezaremos, en primer lugar,
recogiendo distintas definiciones de concavidad y concavidad débil de funciones. La
selección que aquí se presenta no es la única posible, pero es la más representativa y
completa teniendo en cuenta el objetivo de este trabajo.
3
Las definiciones de los diferentes conceptos de concavidad que utilizaremos se
indican a continuación divididas en dos bloques. El contenido de cada uno de ellos
viene determinado por la necesidad o no de la diferenciabilidad de la función para
establecer el concepto correspondiente.
I.
Sea M un subconjunto convexoi y no vacio de n y f una función definida de M
en . Entonces se dice que:
(i)
La función es cóncava en M si y sólo si para cualesquiera x , y ∈ M y
para todo λ∈[0,1] se verifica que
f (λx + (1 − λ ) y ) ≥ λf ( x ) + (1 − λ ) f ( y )
(ii)
La función f es estrictamente cóncava en M si y sólo si para
cualesquiera x , y ∈ M con x ≠ y y para todo λ∈(0,1) se verifica que
f (λx + (1 − λ ) y ) > λf ( x ) + (1 − λ ) f ( y )
(iii) La función f es cuasicóncava en M si y sólo si para cualesquiera
x , y ∈ M y para todo λ∈[0,1] se verifica que
f (λx + (1 − λ ) y ) ≥ mín{ f ( x ), f ( y )}
(iv)
La función f es semiestrictamente cuasicóncava en M si y sólo si para
cualesquiera x , y ∈ M con x ≠ y tales que f ( x ) ≠ f ( y ) y para todo
λ∈(0,1) se verifica que
f (λx + (1 − λ ) y ) > mín{ f ( x ), f ( y )}
(v)
La función f es estrictamente cuasicóncava en M si y sólo si para
cualesquiera x , y ∈ M con x ≠ y y para todo λ∈(0,1) se verifica que
f (λx + (1 − λ ) y ) > mín{ f ( x ), f ( y )}
II.
Sea M un subconjunto convexo, abierto y no vacio de n y f una función
definida de M en , diferenciableii en M. Entonces se dice que:
(vi)
La función f es seudocóncava en M si y sólo si se verifica una de las
siguientes condiciones equivalentes:
- Para cualesquiera x , y ∈ M , tales que f ( y ) > f ( x ) se tiene queiii
( y − x ) ⋅ ∇f ( x ) > 0.
- Para cualesquiera x , y ∈ M tales que ( y − x ) ⋅ ∇f ( x ) ≤ 0 se tiene que
f ( y) ≤ f (x ) .
(vii) La función f es estrictamente seudocóncava en M si y sólo si se verifica
una de las siguientes condiciones equivalentes:
- Para cualesquiera x , y ∈ M , con x ≠ y y tales que f ( y ) ≥ f ( x ) se
tiene que ( y − x ) ⋅ ∇f ( x ) > 0.
- Para cualesquiera, con x ≠ y tales que ( y − x ) ⋅ ∇f ( x ) ≤ 0 se tiene
que f ( y ) < f ( x ) .
Observación
(a) Las definiciones (iii), (iv) y (v) sólo recogen algunas de las posibles
generalizaciones del concepto de concavidad de una función. La elección de estas
definiciones en particular, está motivada porque son las que reflejan los mínimos
requerimientos para que en ciertas condiciones un problema de maximización tenga
solución, ésta sea única y pueda ser global.
(b) Como puede observarse sólo las definiciones (vi) y (vii) se enuncian para funciones
diferenciables, mientras que las restantes son válidas para cualquier tipo de
4
funciones. Algunos autores como Thompson y Parke(1973) y Avriel et al.(1981)
dan los conceptos de seudoconcavidad y seudoconcavidad estricta para funciones
no diferenciables.
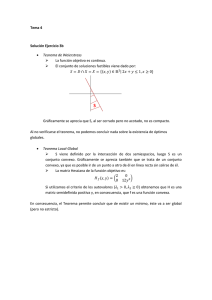
Entre los siete conceptos de concavidad que se han considerado puede establecerse
las relaciones que se recogen en el cuadro 1. Algunas de ellas se verifican siempre
mientras que otras, en particular las señaladas con un asterisco, sólo se cumplen bajo
ciertas condiciones adicionales
Cuadro 1
Las implicaciones (3), (4), (7), (10), (11) y (12) son inmediatas. La implicación
(6) sólo es cierta cuando f es semicontinua superiormente. Las demostraciones de (2),
(5), (6) y (9) pueden verse en Barbolla y Sanz(1995). Por último las implicaciones (1) y
(8) son válidas si se supone explícitamente la diferenciabilidad de la función, por tanto
son condiciones de primer orden.
Además de las implicaciones que se indican en el cuadro 1, se verifica que si una
función diferenciable es seudocóncava y estrictamente cuasicóncava, entonces es
también estrictamente seudocóncava (ver Ponstein(1967), pp. 118).
2.2. CONTORNOS SUPERIORES
FUNCIONES “CONCAVAS”
Y
CONJUNTOS
Sean M un subconjunto no vacío y convexo de
Para cualquier α ∈ se consideran los conjuntos
n
DE
NIVEL
y f una aplicación de M en
DE
.
Ω α = {x ∈ M / f ( x ) ≥ α }
y
Sα = {x ∈ M / f ( x ) = α }
5
Las características de convexidad o estricta convexidad de estos conjuntos,
determinados por la naturaleza de la función f son de gran relevancia para poder
establecer la unicidad de la solución óptima del problema de optimización del
consumidor.
La definición de conjunto estrictamente convexo que se considera en este trabajoiv
es la siguiente:
DEFINICION.
Un conjunto M ⊂ n es estrictamente convexo si y sólo si es convexo y para
cualesquiera x , y ∈ M , se tiene que el segmento abierto
( x , y ) = {z ∈ n / z = λx + (1 − λ ) y , λ ∈ (0,1)}
está contenido en el interior de M..
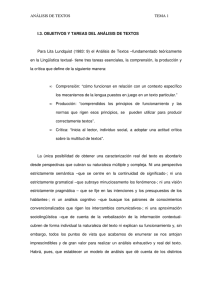
De acuerdo con esta definición Las relaciones entre la convexidad de los
conjuntos Ωα y las características de concavidad o cuasiconcavidad de f se reflejan en el
cuadro 2
f cóncava (1)⇒ Ωα es un conjunto convexo para todo α∈
f estrictamente cóncava (2)⇒ Ωα es estrictamente convexo para todo α ∈
f cuasicóncava (3)⇔Ωα es un conjunto convexo para todo α ∈
f estrictamente cuasicóncava (4)⇒ Ωα es estrictamente convexo para todo α ∈
f semiestrictamente cuasicóncava (5)⇒ Ωα es convexo para todo α ∈
f seudocóncava (6)⇒ Ωα es un conjunto convexo para todo α ∈
f estrictamente seudocóncava ⇐(7) Ωα es estrictamente convexo para todo α ∈
Cuadro 2.
Estas implicaciones se deducen de las definiciones salvo (5), que es cierta
cuando f es semicontinua superiormente y (7), que se verifica si f es C1 y tiene vector
gradiente no nulo en todo punto del conjunto convexo, abierto y no vacio en el que se
define la función f.
3. ANÁLISIS DE LA RESOLUCIÓN DEL PROBLEMA DEL
CONSUMIDOR
Al plantear el problema de maximizar una función sobre un conjunto no vacio M,
puede suceder que el problema tenga o no solución, si existe puede ser local o global y
única o múltiple. Así pues, nos interesará conocer como son, cuando existen, las
soluciones del problema
max f ( x )
( P ')
x ∈M ⊂ n
teniendo en cuenta las características de la función objetivo f, y del conjunto de
soluciones factibles M.
Respecto a esta cuestión la Teoría de la Optimización Matemática (ver Arrow y
Enthoven(1961), Barbolla et al(1991), Bazaraa y Shetty (1982)) indica que si el
problema (P´) tiene solución entonces es posible afirmar que es
6
•
global si f es semiestrictamente cuasicóncava, siendo por tanto cierto también en
todos los casos, excepto cuando f es cuasicóncava. En esta última situación, existe
solución global x * si f tiene un máximo local estricto en x * .
• única si f es estrictamente cuasicóncava, estrictamente seudocóncava o estrictamente
cóncava.
Por tanto, de las implicaciones recogidas en el cuadro 1 y de lo anterior se deduce
que cuando el problema (P´) tiene solución, para que ésta sea única y global la función
objetivo f ha de ser al menos estrictamente cuasicóncava en el conjunto convexo de
soluciones factibles M.
En el contexto de la Teoría del Consumidor, lo anterior se traduce en que para
garantizar la existencia de las funciones de demanda, la función de utilidad ha de ser al
menos estrictamente cuasicóncava. Esta hipótesis, junto con la continuidad y
crecimientov estricto de u en el conjunto de posibles consumos X que se considera
convexo, cerrado y acotado inferiormente, permite demostrar la existencia y continuidad
de las funciones de demanda (ver Malinvaud(1974) , Mas-Colell et al.(1995)).
La estricta cuasiconcavidad de la función u garantiza que para cualquier α∈ ,
los conjunto Ωα son estrictamente convexos, y es precisamente esta última propiedad la
clave para poder garantizar la unicidad del óptimo, y en consecuencia la existencia de
las funciones de demanda. Esto se pone de relieve en el siguiente resultado
PROPOSICION
Sea la familia de problemas (P) con p ∈ n y R∈ vi, X conjunto convexo,
cerrado y acotado inferiormente, y u función cuasicóncava, creciente y C1. Entonces se
verifica que si existe solución del problema (P) y ésta es única y global para todo
p ∈ n y R ∈ , el conjunto Ωα es estrictamente convexo para todo α∈ .
Demostración
Supuesto que el problema (P) tiene solución única para todo p y R veamos que
Ωα es estrictamente convexo para todo α∈ .
Por ser u cuasicóncava Ωα es convexo cualquiera que sea α∈ .
Supongamos que existe α*∈
tal que Ωα* no es estrictamente convexo. Así
0
pues, existirán x , x '∈ Ωα * tales que el segmento ( x 0 , x * ) ⊄ int(Ωα* ) . Ahora bien, como
int(Ωα*) es convexo por serlo Ωα*, de lo anterior se desprende que puede encontrarse
( x 1 , x 2 ) ⊂ ( x 0 , x * ) tal que ( x 1 , x 2 ) ⊂ Fr (Ω α* )
y por tanto, ( x 1 , x 2 ) ∈ Sα * , es decir, para todo λ∈(0,1), z = λx 1 + (1 − λ ) x 2 ∈ Sα * .
Dado que z = x 2 + λ ( x 1 − x 2 ) , si consideramos un vector p* ∈ n
perpendicular a x 1 − x 2 y en la dirección del vector ∇u ( z ) y un número real
R * = p * x 2 , entonces, para todo λ∈(0,1) los puntos z = λx 1 + (1 − λ ) x 2 son soluciones
del problema
7
n
*
s.a. ∑i =1 pi xi = R *
x∈X
ya que p '* z = R * y el hiperplano de la restricción p '* x = R * es paralelo al segmento
( x 1 , x 2 ) pues en cada z ∈ ( x 1 , x 2 ) el vector ∇u ( z ) es paralelo a p * . Así pues, todo
punto del segmento ( x 1 , x 2 ) es óptimo del problema lo que contradice la hipótesis de
unicidad de la solución.
max u ( x )
Una vez analizadas las hipótesis que garantizan la existencia y continuidad de
las funciones de demanda, nos ocupamos ahora de analizar sus características de
diferenciabilidad.
Consideremos de nuevo el problema (P) donde suponemos que pi>0, i=1,...,n,
R≥0 y que la función de utilidad es creciente, estrictamente cuasicóncava y
diferenciable con continuidad. Esto como sabemos, nos asegura que el problema (P)
tiene solución x * única y global, pero además debido a la diferenciabilidad de u,
podemos calcular dicha solución x * a partir de las condiciones de Lagrange de primer
orden resolviendovii el sistema
∂u
( x ) − λpi = 0 i = 1,..., n
∂xi
(2)
n
∑i=1 pi xi = R
*
cuya única solución x * es máximo global y es de la forma xi = xi ( p, R) i = 1,..., n
Obsérvese que el multiplicador de Lagrange λ asociado a la solución óptima será
positivo siempre que la función de utilidad verifique la condición suficiente de
∂u
creciemiento, es decir
( x ) > 0 i=1,...,n para todo x ∈ X o al menos en un entorno
∂xi
de la solución óptima x * Además el carácter creciente de u impide que λ sea negativo
y, si la solución óptima x * lleva asociado un multiplicador nulo, entonces x * es un
punto crítico de la función de utilidad.
Las funciones de demanda xi * = xi ( p, R) i=1,..,n son continuas como ya se
indicó, pero además si u es C2 entonces serán diferenciables sí y sólo si (ver
Katzner(1968)) la matriz
M
−p
0
A=L L
L
− p ' M Hu ( x * )
tiene determinante distinto de cero en el punto x * o, de manera equivalente, teniendo
en cuenta las condiciones necesarias de primer orden, y las propiedades de los
determinantes, si y sólo si el hessiano orlado de la función de utilidad u en x * dado por
8
0
M ∇u ( x * )
~
Hu ( x * ) = L
L
L
∇u ( x * )' M Hu ( x * )
es no singular.
Obsérvese que si el determinante del hessiano orlado de u en x * es no nulo,
entonces el jacobiano de la función vectorial que define el sistema de ecuaciones (1)
tiene rango completo y, por el Teorema de la Función Implícita este sistema define
implícitamente en un entorno de ( x * , λ* ) a x y λ como funciones diferenciables de p
~
y R, es decir, las funciones de demanda son diferenciables. La condición | Hu ( x * ) |≠ 0
no es sólo suficiente para establecer la diferenciabilidad de las funciones de demanda,
sino que además es necesaria. Sin embargo, es de destacar que comprobar esto último
no es inmediato.
3.1. DETERMINANTE DEL HESSIANO ORLADO.
En contra de lo pudiese parecer en un principio, no es frecuente que una función
~
f verifique que | Hf |≠ 0 en todo punto ya que, de hecho, como se indicó en la
introducción, ni siquiera las funciones estrictamente cóncavas cumplen necesariamente
~
4
4
esta propiedad. Así por ejemplo para f(x1,x2) = − x1 − x 2 se tiene que | Hf |= 0 en los
puntos de la forma (x1,0) ó (0,x2). Por tanto, si tenemos en cuenta el cuadro 1, sin
ninguna hipótesis adicional no es posible afirmar, para ninguno de los tipos de
~
funciones cóncavas y C2 a las que este cuadro se refiere que el valor de | Hf | es
distinto de cero en cada punto.
A partir de las condiciones, tanto de primer como de segundo orden aplicables a
estas funciones (Barbolla y Sanz(1995)) se deduce que únicamente cuando la función f
cumple la condición suficiente de segundo orden de estricta cuasiconcavidadviii.puede
~
afirmarse que | Hf ( x ) | será no nulo en cada punto.
Existe una condición más débil debida a Katzner, que garantiza, en parteix, la no
~
nulidad de | Hf ( x ) | (ver Katzner(1970) pp. 211).
Alternativamente desde un enfoque de teoría de optimización se puede
~
garantizar que | Hf ( x * ) |≠ 0 si en la solución óptima x * del problema del consumidor se
verifica la condición suficiente de segundo orden de máximo local.
~
Dado que, como ya se ha indicado, la condición | Hf ( x * ) |≠ 0 es clave para
establecer la diferenciabilidad de las funciones de demanda y que esta característica del
hessiano orlado no se verifica de manera inmediata, es razonable cuestionarse de qué
~
forma se traduce la nulidad de | Hf ( x ) | en el comportamiento de la función f.
~
*
*
En relación a esto, cuando n=2 el hecho de ser | Hf ( x1 , x 2 ) |= 0 es equivalente
*
*
a que la curva de nivel f ( x1 , x 2 ) = f ( x1 , x 2 ) tenga curvatura nula en el punto
x * = ( x1 , x 2 ) . En efecto, si se supone que ∇f ( x1 , x 2 ) ≠ 0 , y que f es C2, la curva de
*
*
*
*
9
nivel f ( x1 , x 2 ) = f ( x1 , x 2 ) = c * de f define implícitamente a x2 como funciónx de x1,
x2=h(x1), en un entorno U(x1*) de x1*. Teniendo esto en cuenta, se puede considerar la
parametrización de la curva f(x1,x2) = c* en un entorno de x * en la forma
*
x ≡ ( x1 , x2 ) = ( x1 , h( x1 )) con x1 ∈ U ( x1 )
Ahora bien, como la curvatura k de la curva x en x * (ver [15]) se define por
x& &x& − x& 2 &x&1
k= 1 2
3 x =x *
x& 2 + x& 2 1 1
2
1
obtenemos que
*
h" ( x1 )
k=
3/ 2
*
1 + (h' ( x1 )) 2
y como
∂f
(x * )
∂x
*
h' ( x1 ) = − 1
∂f
(x * )
∂x 2
*
*
(
)
2
∂f
∂2 f *
∂f
∂2 f
∂ 2 f * ∂f
* ∂f
*
*
x
−
x
x
x
+
( x * )
(
)
2
(
)
(
)
(
)
( x )
( x * )
2
2
∂x
∂x1
∂x 2
∂x1 x 2
∂x 2
*
∂x1
∂x1
h" ( x1 ) = − 2
3
∂f
( x * )
∂x 2
resulta finalmente que
k=
2
~
Hf ( x * )
∇f ( x * )
3
~
Así pues, si | Hf ( x * ) |= 0 entonces k=0 lo que intuitivamente significa que en las
proximidades de x * , la curva f(x1,x2)=c* es casi “una recta”.
~
En el caso de n>2 el significado de | Hf ( x * ) |= 0 es similar, ya que la nulidad del
determinante del hessiano orlado de f en x * equivale a que la superficie f ( x ) = f ( x * )
tenga curvatura gausssiana nula en el punto x * tal como se muestra en el siguiente
desarrollo.
Dada una superficie S = {x ∈ n / f ( x1 ,..., xn ) = f ( x * ) = c*} definida por una
función f C2 y que admite una parametrización regular a partir de n-1 parámetros en la
forma x = x (α 1 ,...,α n −1 ) , es posible definir una aplicación N que asocie a cada punto
x 0 de S un vector unitario de n perpendicular a S en x 0 . En concreto si ∇f ( x * ) ≠ 0 ,
∂f
siendo por ejemplo
( x * ) ≠ 0 se tiene, en virtud del Teorema de la Función
∂x n
10
Implícita,
la
parametrización
de
S
en
un
entorno
de
x0
x (α 1 ,...,α n −1 ) = (α 1 ,α 2 ,...,α n −1 , h(α 1 ,...,α n −1 )) siendo h la función implícita definida por
*
*
la ecuación f ( x ) = f ( x * ) en un entorno U de ( x1 ,..., x n −1 ) . En este caso una posible
definición de N es
∂h
∂h
−
,...,−
,1
∂α 1
∂α n −1
N (x) =
( x1 ,..., x n −1 ) ∈ U
2
2
α = ( x1 ,..., x n −1 )
∂h
∂h
+ 1
+ ... +
α
α
∂
∂
1
n −1
Si se considera ahora cualquier curva ω (t ) = (α 1 (t ),...,α n−1 (t )) de la hipersuperficie S de
manera que ω ( 0 ) = x * , se define la curvatura Gaussiana (Do Carmo(1995)) de S en
x * como el determinante de la matriz asociada a la aplicación lineal
dN x * : Tx * ( S )
→ Tx * ( S )
donde Tx * ( S ) es el subespacio tangente a S en x * . Ahora bien, teniendo en cuenta que
ω ' (0) ∈ Tx ( S ) tenemos que
*
(
dN x * (ω '(0)) = dN x * xα1 α1 '(t ) + xα2 α '(t ) + ... + xαn−1 α 'n −1 (t )
)
t =0
=
n −1
d
N x * ( α1 (t ),..., α n −1 (t ) ) t =0 = ∑ N αi ⋅α 'i (t ) t =0
dt
i =1
y como para cada i=1,...,n-1 , Nα i ∈ Tx * ( S ) y una base de Tx * ( S ) es {xα1 ,..., xα n−1 }
=
resulta que para cada i=1,...,n-1
n −1
Nα i = ∑ aij xα j
j =1
de donde
n −1 n −1
dN * (ω '(0)) = ∑ ∑ aij xα j
x
i =1 j =1
α i '(t )
siendo entonces la matriz asociada a dN
la dada por
x
*
n −1 n −1
=
t = 0 ∑ ∑ aij α i '(t ) xα j
j =1 i =1
t =0
respecto de la base {xα1 ,..., xα n−1 } de Tx * ( S )
A = (aij ) i =1,.., n −1
j =1,..., n −1
*
y la curvatura gaussiana de S en x , k =| A | .
En particular, para n=3, si se considera la parametrización de la superficie
f ( x1 , x2 , x3 ) = f ( x * ) en la forma antes indicada
x (α1 ,α 2 ) = (α1 ,α 2 , h(α1 ,α 2 ))
y la aplicación N definida por
11
N (α1 ,α 2 ) =
∂h
∂h
−
,−
,1
∂α1 ∂α 2
2
2
∂h ∂h
+
+ 1
∂α1 ∂α 2
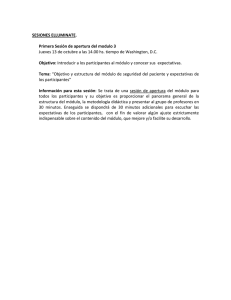
siendo en este caso
∂h
xα1 = 1,0,
∂α1
se obtiene que la curvatura gaussiana de
k=
a11
a21
∂h
xα 2 = 0,1,
∂α 2
f ( x1 , x2 , x3 ) = f ( x * ) en x * es
~
Hf ( x * )
a12
=−
4
a22
∇f ( x * )
y
% (x*) = 0
de donde k = 0 si y solo si Hf
4. CONCLUSIONES
Tras el análisis efectuado en este trabajo podemos concluir lo siguiente:
(i)
Para demostrar la existencia y continuidad de las funciones de demanda es
preciso que el problema (P) tenga solución única y global, y esto se garantiza si
u es continua, creciente y estrictamente cuasicóncava. Esta última hipótesis
gerantiza la estricta convexidad de los conjuntos Ωα , que es condición necesaria
para la unicidad del óptimo emn el problema (P).
(ii)
La obtención de funciones de demanda diferenciables para las que es posible
establecer la ecuación de Hicks-Slustky (ver Varian(1980)), exige como
~
condición, que además es necesaria y suficiente la no nulidad de Hu ( x*) . Para
que esto se cumpla, es preciso considerar que la función u, no sólo es C2 y
estrictamente cuasicóncava, sino que debe también verificar las condiciones
suficientes de segundo orden para funciones estrictamente cuasicóncavas. Así
pues, esta hipótesis es quizás la más restrictiva del modelo neoclásico del
consumidor, ya que además de ser necesaria para la diferenciabilidad de las
funciones de demanda, es así mismo la que permite garantizar el carácter
negativo del efecto de sustitución.
Por tanto, la clase de funciones en la que es posible elegir una función de
utilidad, que nos permita conocer cómo varía la cantidad demandada de un bien, frente a
los cambios en los precios, queda muy restringida dados el tipo y el número de las
hipótesis que han de verificarse.
BIBLIOGRAFÍA.
Apostol, T. (1979). Análisis Matemático, 2ª Ed. Reverté, S.A.
Arrow, K.J.; Enthoven, A.C. (1961). Cuasiconcave Programming. Econométrica 29, pp.
779-800.
12
Avriel, M.; Diewert, W.E.; Schaible, S.; Ziemba, W.T. (1981). Introduction to concave
and generalized Concave Functions . Generalized concavity in optimization and
Economics. Academic Press. pp. 21-50.
Barbolla, R.; Cerdá, E.; Sanz, P. (2000). Optimización. Cuestiones, ejercicios y
aplicaciones a la economía. Prentice Hall.
Barbolla, R.; Sanz, P. (1995). La concavidad en un modelo Económico: funciones de
demanda. Pirámide.
Barten, A.P.; Böhm, V. (1982). Consumer Theory. Handbook of Mathematics
Economics. Vol. II. Ed. Arrow and Intriligator North-Holland pp. 381-429.
Bazaraa, M.S.; Shetty, C.M. (1979). Nonlinear Programming: Theory and Algorithms.
J. Wiley.
Do Carmo, M. (1995). Geometría diferencial de curvas y superficies. Alianza
Universidad.
Katzner, D.W. (1968). A note on the differentiability of consumer demand functions.
Econométrica 36, nº2, pp. 415-418.
Katzner, D.W. (1970). Static Demand Theory. Macmillan Company.
Malinvaud, E. (1974). Lecciones de Toería Microeconómica. Ariel.
Mangasarian, O.L. (1969). Nonlinear Programming. Mc. Graw-Hill Book Company.
Mas-Colell, A.; Whinston, M.D.; Green, J.R.(1995). Microeconomic Theory. Oxford
University.
Ponstein, J. (1967). Seven kinds of convexity. SIAM Review 9, pp. 115-119.
Stein, S.K. (1982). Cálculo y Geometría analítica. Mc. Graw-Hill.
Thompson, W.A.; Parke, D.W. (1973). Some Properties of Generalized Concave
Functions. Operations Research, 21 , pp. 305-313.
Varian, H. (1980). Análisis Microeconómico. Bosch.
i
Un conjunto M ⊂
verifica que
n
es convexo si y sólo si para cualesquiera x , y ∈ M y para todo λ∈[0,1], se
z = λ x + (1 − λ ) y ∈ M
es decir, el segmento [ x , y ] = { z ∈
/ z = λx + (1 − λ ) y , λ ∈ [0,1]} está contenido en M.
ii
Como definición de función diferenciable se considera la que se recoge en Apóstol (1979) pp. 420.
iii
Por a ⋅ b ó ab se notará el producto escalar de los vectores a y b
n
iv
Una definición alternativa de conjunto estrictamente convexo es la siguiente: Un conjunto M ⊂
n
es
estrictamente convexo si y sólo si es convexo y para cualesquiera x , y ∈ M , se tiene que el segmento
abierto ( x , y ) = { z ∈
n
/ z = λ x + (1 − λ ) y , λ ∈ (0,1)} está contenido en el interior de M respecto de la
topología relativa al subespacio afín que contiene a M.
v
Si x > y ( xi > yi , i = 1,..., n ) entonces u ( x ) > u ( y ).
El enunciado de esta proposición es cierto incluso si p y R no cumplen la restricción de no
negatividad. Esto último carece de significado económico, sin embargo como resultado matemático que
engloba esta situación particular, mantiene su sentido.
vii
Al resolver el sistema no se consideran las soluciones ( x% , λ% ) para las que no se verifique que x ≥ 0 .
vi
viii
Sea M un subconjunto convexo, abierto y no vacío de
r=2,3,...,n+1 se verifica que
r −1
% ( x )] > 0
( −1) D [ Hf
r
n
. Si para todo x ∈ M y
(3)
13
% ( x )] el
entonces, f es estrictamente seudocóncava y, por tanto estrictamente cuasicóncava, siendo Dr [ Hf
menor principal de orden r de la matriz hessiana orlada de f. Esta condición, cuando el vector ∇f ( x ) es
no nulo en cada punto, equivale a que la forma cuadrática q ( v ) = v ' Hf ( x ) v restringida a
{v ∈
/ v ∇f ( x ) = 0} sea definida negativa para todo x ∈ M .
ix
Si f es una función estrictamente cuasicóncava, C2 y con derivadas parciales positivas en M, entonces
la condición (2) se verifica en un subconjunto D⊂M denso en M”
x
Se razona de manera análoga cuando x1 es función implícita de x 2 .
n
14