Inicio »Arduino Servo Controlador Servo Junta de Control
Anuncio

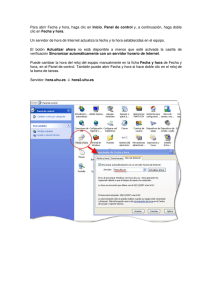
Inicio »Arduino Servo Controlador Servo Junta de Control de la USC Panel de control de servo. Prueba rápida Instrucciones del panel de control para el uso de los servos Servocontrol ordenador de a bordo de software Panel de control de servo Android teléfono móvil de software Dirigir panel de equipo de control con 51 procedimientos de comunicación de un solo chip Inicio » Arduino Servo Servo controlador de panel de control USC »las instrucciones para el uso servocontrolador Arduino Mini USB instrucciones servocontrolador (USC) actualización: 20/10/2011 I. Introducción 32 de alta velocidad de la CPU, un procesamiento más rápido, el control es más preciso y un funcionamiento más estable. Reconoce automáticamente la velocidad de transmisión (9600,19200,38400,57600,115200,128000 identificación automática). Nota: chip de fuente de alimentación USB, puerto USB y el aislamiento de energía del chip puede evitar que el flujo de la corriente inversa en el puerto USB. El aparato de gobierno necesita una gran cantidad de corriente, así que no recomiendo el aparato de gobierno y el chip directamente a compartir el poder, si el número de servos de un montón de acción del aparato de gobierno cuando el chip se puede restablecer! Indirectamente, se puede compartir el poder, de la siguiente manera: Si la tensión de alimentación de 12V, este poder se dividió en dos grupos (dos líneas en cuatro líneas), de los cuales dos estabilizador de tensión de línea, regulador de voltaje de tensión al aparato de gobierno necesitan y, a continuación para el suministro de energía del aparato; las otras dos líneas están conectados directamente a la derecha de la entrada de potencia de chips (ya que el dispositivo regulador de chips de a bordo). Servocontrolador requiere de dos fuentes de alimentación, el suministro de energía del chip y el poder del servo, el suministro de energía en los procesadores pueden funcionar con la computadora vía USB, el poder del aparato de gobierno no puede utilizar el aparato de gobierno alimentado por USB es un dispositivo de alta potencia, si se utiliza la conexión USB quemar a su equipo, y el control del aparato de gobierno. De energía del chip, si no mediante un cable USBpowered, por la fuente de alimentación de VSS en la siguiente figura, la tensión de entrada entre 6.5V ~ 12V, por favor, tenga cuidado! Dirección Asistida engranaje es la entrada por la imagen de arriba VS, a continuación, introduzca cuántos voltios engranaje de dirección por el número de fuente de alimentación es voltios de entrada directamente a la fuente de energía del aparato! Rango de tensión de entrada se determina con base en las necesidades reales de su aparato de gobierno, como el servo de metal TR213 4.8V-7.2V, si hay más de este rango va a quemar el aparato de gobierno. Con el fin de evitar pérdidas innecesarias, en estricta conformidad con las instrucciones! En segundo lugar, la instrucción 1, mueva el aparato de gobierno Formato de instrucción: # P <num> <pwm> .... T-<hora> \ R \ n <num> = número de equipos de dirección, rango de 1 a 32 (decimal) <pwm> = ancho de pulso (posición del servo) 500-2500 rango. Unidades de nosotros (microsegundos) <hora> = moverse a la ubicación especificada con el tiempo, todos los servos efectiva (rango :100-9999). \ R \ n-= 0x0D número hexadecimal, 0x0A (retorno de carro), los comandos de terminación. Por ejemplo: # 8P600T1000 \ r \ n Mueva el aparato de gobierno el 8 de ancho de pulso 600US, el uso del tiempo de 1000 ms # # 11P2000 30P2500T1500 \ r \ n Mobile en el equipo 11 de la dirección de la anchura del pulso 2000us aparato de gobierno se mueven 30 a las 2500us ancho de pulso, el tiempo de 1500 ms, la velocidad del aparato de gobierno del movimiento depende de la posición de tiempo servo anterior para decidir el aparato de gobierno, el 11 y 30 El aparato de gobierno al mismo tiempo, llegó a la ubicación designada. 2, la ejecución del grupo de acción Formato de instrucción: # <num> G # G C <num> <cycle> \ r \ n <num> = acción número de grupo, el rango 1-N-(un número decimal, n es el número real) <Cycle> = Número de ciclos, rango 1-999 (decimal). Por ejemplo: # 1GC99 \ r \ n La implementación de un grupo de acción, el bucle se ejecuta 99 veces. # # 1G 2G 4G # # 2GC1 \ r \ n Ordenar la ejecución de la primera, segunda, cuarta, el grupo de acción en segundo lugar, el bucle se ejecuta una vez (grupo de acción pueden ser reutilizados, como en este caso # 2G tiene dos). Ejecutado volverá a la AGF, como una señal de ejecución. 3, ejecute en línea Formato del comando: # # Habilitar <num> G # C <cycle> ... \ r \ n Por ejemplo: # # la opción Activar 1GC5 \ r \ n De energía del aparato de control de grupo de acción del primer bucle se ejecuta 5 veces. # DISABLE \ r \ n deshabilitar ejecutar sin conexión. 4, lea el valor de la tensión analógica Por ejemplo: # AD [1] \ r \ n lectura AD1 puerto de tensión # AD [2] \ r \ n lectura AD2 puerto de tensión Regresar a la forma de una cadena de decimales (precisión 12bit0V-3.3V) para devolver el rango de datos es 0000-4095 En tercer lugar, las instrucciones de control de servo de software para su uso 32 canales de software de control de servo un puerto está establecido en Abierto y conectado con el número de serie del control del aparato de gobierno, y establecer la velocidad de transmisión. Este proceso verifica si el usuario es el controlador de nuestra empresa! b, el panel (cada panel se corresponde con la forma en que el aparato de gobierno) Arrastre el control deslizante en el panel, si el control del aparato de gobierno y las conexiones de ordenador a la derecha en el controlador de diodo emisor de luz de flash (conexión USB no está parpadeando), el aparato de gobierno también seguirá la acción deslizante. c, la configuración del panel "Configuración del Panel" -> Haga clic en la esquina superior izquierda del modo de panel de edición. En este modo, puede arrastrar la posición del panel 32, haga clic en el botón para ocultar y mostrar el panel correspondiente. Haga clic en "X" se guarda automáticamente la ubicación del panel y mostrar la información oculta. d, edición y acción de prueba En primer lugar, arrastre la barra deslizante para ajustar el estado del servo de cada aparato de gobierno correspondiente, después del ajuste, la parte inferior derecha del software de la opción "Agregar", luego el software se forman en la parte inferior de un comando, que se imagina que este comando para todos los actuales El aparato de gobierno de un estado, un comando que corresponde a un estado, luego de una serie de comandos es una serie de Estado, una serie de Estado es una acción del robot, similar a la animación. Se puede continuar para seguir los pasos anteriores para añadir una serie de otros comandos. Una serie de comandos para depurar añadir una buena, puede hacer clic en el software de la derecha de "Ejecutar" para observar los movimientos del aparato de gobierno o un robot es la correcta. Durante la operación, el código de la ventana de código será una ejecución baja, la ejecución vuelva a parar. Haga clic en el ciclo "de la operación, el código para mostrar la ventana de comandos se repetirá hasta que haga clic en el final, sólo para detener la ejecución. e para trabajar sin conexión El controlador se basa en el grupo de acción para gestionar el movimiento de datos, haga clic en el botón Descargar en el software de control, la ventana de visualización del código, el código se puede descargar con el control del aparato de gobierno, el grupo de acción por controlador servo descarga 1 . Cuando la descarga grupo de acción después de lo cual se puede leer el grupo de acción "para ver el grupo de acción del controlador, seleccione el usuario que desea llevar a cabo ese grupo de acción, el número predeterminado de ejecuciones de una lista desplegable, el usuario puede modificar la aplicación de la El número de veces, y luego haga clic en la aplicación ", por lo que el control del aparato de gobierno llevará a cabo inmediatamente definido por el usuario grupo de acción. Haga clic en "Activar", el control del aparato de gobierno cada poder realiza automáticamente el grupo de acción deseada (que se conoce comúnmente como el funcionamiento en línea). Cuando haga clic en el "discapacitado", el hecho de no ejecutar sin conexión. "Leer la acción número de grupo, este comando es el número de grupos que lean la acción almacenada en Flash. f, el robot de tipo El valor por defecto de software tiene TOROBOT, el robot de seis patas "," 19 grados de libertad del humanoide "," 17, el robot bípedo humanoide DOF, el robot cuadrúpedo "manipulador" siete tipos, puede cambiar fácilmente . Seleccione un tipo determinado, haga clic en el conjunto del panel se corresponde con el tipo de configuración del panel, haga clic en la "X" para salir del modo de edición y guardar. g, el restablecimiento del panel El comando de reinicio para restaurar las configuraciones del panel, panel de 32, distribuidos uniformemente. h, Todos los XXX = Todos los comandos = XXX es para todos deslizante del panel en XXX. i, borrar el flash Cuidado con este comando! Este comando se utiliza para borrar todos los datos almacenados en Flash, incluyendo el grupo de todas las acciones. Después de ejecutar este comando, es necesario esperar más de diez segundos (se recomienda que este proceso no en el software y el controlador), cuando el software le preguntará si desea borrar el éxito de borrado completo. Si ella tenía el control del aparato de gobierno de apagado, y luego borrado se interrumpe en este tiempo de borrado no está terminado, pero el flash entero será parte de la borró todo de este accidente, se recomienda que se ejecuta este comando hasta que el mensaje "Borrar completar." Configuración avanzada de J, el grupo de acción "Avanzado" de ajuste es un conjunto más avanzado para la ejecución del grupo de acción y grupo de acción para ejecutar en línea, la necesidad de introducir manualmente manualmente el comando a ejecutar. Haga clic en trabajar sin conexión, dentro de la "avanzada" para entrar en la interfaz de configuración avanzada Se recomienda hacer clic en "leer el grupo de acción" para conseguir el aparato de gobierno el control de la acción número de grupo, porque el identificador de grupo de acción de la entrada del usuario no puede ser mayor que el valor máximo actual en la entrada antes de la orden, si se produce un error, el software le pedirá . El formato del comando es la siguiente: # 1 G # 2G # 1GC8 cuadro de texto sólo se pueden introducir números, letras mayúsculas "G" y el carácter "C" "#" no puede entrar en otros personajes de la última No agregue un retorno de carro y salto de línea, ya que el programa añaden automáticamente, el grupo de acción se puede repetir. Este comando es la aplicación continua de la primera, segunda, un grupo de acción, el bucle se ejecuta ocho veces. Entrada de comando se termina, el usuario puede hacer clic en "Ejecutar" para observar el efecto. (Ejecutar el comando a ejecutar de inmediato el cuadro de entrada) el usuario también puede hacer clic en "Activar" para ejecutar la línea de comandos. (Activar el encendido de forma automática). "Disabled" es el comando para deshabilitar el funcionamiento en línea, es decir, eliminar el último comando se ejecuta en línea. Nota: Si la entrada del usuario para ejecutar el comando en línea requiere de la implementación de un tiempo muy largo, como por ejemplo # # 2GC999 1G, en teoría, este comando sin ningún error, pero que necesita para ejecutarse 999 veces, el tiempo muy, muy largo, el usuario puede encontrar una razón de running S1 controlador de servo, y luego volver a encender, por lo que el último entró el comando ejecutar en línea se desactiva. k, utilizando el mando a distancia Mando a distancia para controlar el grupo de acción en el panel de mando del aparato debe ser confirmado antes de usar el mando a distancia, cuatro de control de botón del control remoto ya está configurado el grupo de acción correspondiente, es decir, para establecer las necesidades de cada botón la ejecución del grupo de acción, y para abrir la función de control remoto. l, importación y exportación Exportar es el comando de exportación para editar el comando área a su equipo, el valor de las exportaciones es el ancho de pulso del aparato de gobierno para completar un valor exportado en el "valor de las exportaciones en relación" la forma es el ancho de pulso del aparato de gobierno en relación a la posición inicial valor en la forma de exportación y la función de importación es todo lo contrario. m, comprobación de actualización automática El software de control del control del aparato de gobierno en el 5s detecta automáticamente cada vez que abra el programa después de la actualización, a fin de garantizar que los usuarios ahora pueden usar el software más reciente, lo haremos de vez en cuando arreglar algunos bugs y añadir un poco más humano.m, desinstalar el software de control del software de mando del aparato en el directorio de registro de la computadora para crear una clave relacionados con mantener los datos de software, si un usuario ya no utilizar este software, usted puede hacer clic en "Configuración" en el software de la parte superior derecha. a continuación, haga clic en "Desinstalar" Esta operación borrará todos los datos almacenados en el registro de la computadora del usuario, tales como el panel se organiza, ajustes del puerto COM, el idioma, etc, por favor tenga cuidado. En cuarto lugar, la instalación del controlador Descargar Driver: http://www.torobot.com/down/USC_driver.exe Haga doble clic en USC_driver.exe, haga clic en Siguiente para instalar automáticamente los controladores. El proceso de instalación del controlador, aparece el siguiente mensaje, seleccione la opción "Siempre instale este software de controlador". El proceso de instalación del controlador, aparece el siguiente mensaje, seleccione "continuar". Preguntas más frecuentes ¿Por qué utilizar el software de ordenador puede controlar la dirección, pero me han escrito para el software de sistema operativo y el uso de microprocesador que controla cuando se envía # 1P1500T100 \ r \ n, aparato de gobierno y no pasa nada? La causa de este fenómeno, ya que no lea cuidadosamente y entienda las instrucciones. En primer lugar de todos los comandos de control a través del puerto serie se produjo como una cadena a partir de un comando como un terminador de comando tiene un \ r \ n \ r \ n son los dos caracteres, \ r retorno de carro, \ n los saltos de línea, retornos de carro, los 0x0d número hexadecimal, las envolturas 0x0A hexadecimal, algunos compiladores \ r \ n retorno de carro y salto de línea compilado, lo que, naturalmente, no será un problema , pero algunos compiladores, dependiendo del contenido específico de la función de correlación. Tal situación, usted tiene que verificar su función de envío es el \ r \ n-como "\ r \ n" de la cadena, o como un retorno de carro y salto de línea, cuando el uso del microcontrolador para enviar comandos, no 99% de los problemas anteriores el envío de la función es la \ r \ n-como "\ r \ n" una cadena, lo que demuestra que usted está enviando función no puede ser \ r \ n convierte automáticamente en un retorno de carro y línea, esta vez se puede modificar la función, el método más sencillo es # 1P1500T100 \ r \ n se divide en el 1P1500T100 # y \ r \ n # 1P1500T100 cadena normal enviado \ r \ n es un número hexadecimal para enviar a (enviar 0x0D y 0x0A). Si utiliza otro software, u otro programa o un microcontrolador para enviar # 1P1500T100 \ r \ command nen el panel de mando del aparato, del aparato de gobierno sin ningún tipo de respuesta, esta vez se puede usar ayudantes serie de depuración o puerto serial del software de monitoreo, seguimiento de los datos que usted envíe a número hexadecimal, si es 0x20 0x23 0x31 0x50 0x31 0x35 0x30 0x30 0x54 0x31 0x30 0x30 0x0D 0x0A, entonces puede ser la causa del problema es que los 0x0D 0x0A últimos, la última debe ser trabajo de 0x0A 0x0D. Chr (13), avance de línea de retorno de carro, Chr (10). La elaboración de software para PC en la parte posterior, al mismo tiempo con estos dos personajes para representar el retorno de carro y la línea, por ejemplo, '# 1P1500T100 "+ Chr (13) + Chr (10). Glosario: ¿Cuál es el grupo de acción Servocontrol consejo grupo de acción, nuestra propia independencia y la desarrolló por primera vez, se ha ajustado una característica gesto es el software para PC del lado del empaquetado en un grupo de acción, y luego se cargan en el panel de mando del aparato, después de la descarga ha sido exitosa, la formación de un número, como el número 1, si desea llevar a cabo este grupo de acción, envíe # 1GC1 \ r \ n al (ciclo C1 1). Glosario: ¿Qué está en línea Sin conexión está fuera de la computadora, microcontrolador, siempre y cuando un engranaje de dirección del panel de control conectada a la fuente de alimentación puede controlar los servos 32 en el movimiento mismo tiempo. Definición: fuera de línea es como funciona El funcionamiento sin conexión se debe establecer de antemano. Abra el software de cliente de PC en su ordenador, seleccione el grupo de acción que se realiza en línea, a continuación, seleccione el número de veces, y luego haga clic en "Activar", el programa final se le pedirá que configure el éxito, esta vez, puede dejar que el aparato de gobierno el control de reinicio del panel (se puede desconectar la potencia del chip, y luego vuelva a enchufar), el fenómeno de fuera de él! Glosario: 32 CPU Muchos de el panel de control de la dirección tradicional de arte es un barato 8 CPU, tales como el AVR microcontrolador 51, ocho, velocidad de la CPU y el rendimiento está muy por detrás de la 32 de las varias veces de la CPU. Inicio » Servo Servo controlador Arduino del panel de control USC »Android software para teléfonos móviles 6 deslizador de control de servos (6 Haga clic en el botón a la izquierda, y se controla el número del aparato de gobierno se pueden personalizar) 16 de control de botón de comando de la acción de grupo 16 (Mantenga pulsado el botón, usted puede orden de encargo) Configuración de la página de Software Servocontrolador teléfono Android de software de control Descargar: http://www.torobot.com/down/RIOS_USC.apk Inicio » Servo Servo controlador Arduino del panel de control USC »Android teléfono para controlar el robot Materiales esenciales: Servo tablero de control ( panel de control de 32 servos , panel de control de 24 servos panel de control de 16 servos , consejo controlador del robot ) Módulo Bluetooth Software para teléfonos móviles Android Módulo Bluetooth En primer lugar conectado a la tarjeta de control de servo (tablero fila 5P intermedia de la madre de negro) y, a continuación, respectivamente, en el tablero de mando del aparato de la viruta y el aparato de gobierno la fuente de alimentación, el suministro normal de electricidad, el presidente del módulo Bluetooth de color verde brillante LED ( módulo Bluetooth fuente de alimentación es normal), el LED rojo parpadea (para el módulo Bluetooth aún no se ha conectado). A continuación, abra la http://www.torobot.com/usc-android/ página, descargar e instalar el software del teléfono. A continuación, abra el software RIOS en el teléfono, haga clic en "Configuración de Bluetooth" en la página, si es un teléfono Android, el número de IMEI de la parte inferior de la página es enviada a la empresa (mayúsculas y minúsculas); usuario de Android tableta, abrir el software antes de abrir la plana wifi acceso inalámbrico a Internet, a continuación, abra el software en la página de configuración del software, el software bajo la dirección MAC de los comerciantes (tenga en cuenta los símbolos y el caso, exactamente el mismo). Después de aproximadamente un minuto, se puede activar (proceso de activación requiere la creación de redes, redes y luego haga clic en el botón Activar, el software le pedirá la activación de éxito o de la activación falla, sólo la primera activación sólo es necesario la creación de redes, el futuro no tiene por qué utilizar el proceso de trabajo en red también se puede utilizar) . Si la activación falla, se confirma el número IMEI del comerciante o el número de MAC se muestra con el software exactamente lo mismo (mayúsculas y minúsculas). La activación es exitosa, el mismo en el teléfono RIOS página, haga clic software de configuración de la búsqueda "para Bluetooth, y luego esperar un tiempo (unos diez segundos), el botón de búsqueda aparecerá al lado de la búsqueda de dispositivos, el módulo Bluetooth, esta vez haga clic en esta búsqueda en el equipo, el software le pedirá que introduzca una contraseña, introduzca la contraseña por defecto 0000, después de la luz roja LED del módulo Bluetooth en el presidente, dijo que la conexión es correcta. Si el software del teléfono móvil durante un largo tiempo no sucede, se recomienda que reinicie el teléfono, y vuelva a intentarlo. Después de una conexión con éxito, puede introducir los Ríos de la página del aparato de gobierno, el control directo del aparato de gobierno (Arrastre el control deslizante para ver el número uno de la correspondencia).