Document
Anuncio

SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
Tema 3.
Sistemas.
un sistema discreto con entrada x[n] y salida y[n] . La relación
entrada−salida para este sistema es:
1. Considere
y[n] = x[n ]⋅ x[n − 2 ]
a) ¿El sistema es sin memoria?
b) Determine la salida del sistema cuando la entrada es A ⋅ δ [n] , donde “A” es un
número real o complejo.
c) ¿El sistema es invertible?
[Sol.: (a) No; (b) y[n] = 0; (c) No]
[P 1.16 de Oppenheim ]
Considere un sistema continuo con entrada x (t ) y salida y (t ) , estando relacionadas
mediante:
2.
y (t ) = x(sen( t ) )
a) ¿El sistema es causal?
b) ¿El sistema es lineal?
[Sol.: (a) No; (b) Sí]
[P 1.17 de Oppenheim ]
3.
Determine (argumentando la respuesta) qué propiedades (sin memoria, invariante
en el tiempo, lineal, causal, estable) cumplen los siguientes sistemas continuos:
b) y (t ) = [cos( 3t )] ⋅ x (t )
a) y (t ) = x(t − 2) + x (2 − t )
c) y (t ) =
: t<0
0
d) y (t ) =
x(t ) + x (t − 2) : t ≥ 0
2t
∫ x(τ ) ⋅ dτ
−∞
: x (t ) < 0
0
e) y (t ) =
x(t ) + x (t − 2) : x (t ) ≥ 0
g) y (t ) =
t
f) y (t ) = x
3
dx (t )
dt
[Sol.: (a) Lineal, estable; (b) Sin memoria, lineal, causal, estable; (c) Lineal;
(d) Lineal, causal, estable; (e) Invariante, causal, estable; (f) Lineal, estable;
Pág.
1
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
(g) Invariante, lineal]
[P 1.27 de Oppenheim]
4. Determine
(argumentando la respuesta) qué propiedades (sin memoria, invariante en
el tiempo, lineal, causal, estable) cumplen los siguientes sistemas discretos:
a) y[n] = x[− n ]
b) y[n] = x [n − 2] − 2 ⋅ x [n − 8]
c) y[n] = n ⋅ x[n]
d) y[n] = Par {x [n − 1]}
: n≥1
x [n]
e) y[n] = 0
: n =0
x [n + 1] : n ≤ −1
x[n ] : n ≥ 1
f) y[n] = 0
: n =0
x[n ] : n ≤ −1
g) y[n] = x[4n + 1]
[Sol.: (a) Lineal, estable; (b) Invariante, lineal, causal, estable; (c) Sin memoria, lineal,
causal; (d) Lineal, estable; (e) Lineal, estable; (f) Sin memoria, lineal, causal, estable;
(g) Lineal, estable]
[P 1.28 de Oppenheim]
5. Determine
si cada uno de los siguientes sistemas es invertible. En caso afirmativo,
construya el sistema inverso. Si no, encuentre dos señales de entrada al sistema que den
la misma salida .
a) y (t ) = x( t − 4)
b) y (t ) = cos[x( t ) ]
c) y[n] = n ⋅ x[n]
d) y (t ) =
t
∫ x(τ ) ⋅ dτ
−∞
x[n − 1] : n ≥ 1
e) y[n] = 0
: n =0
x[n ]
: n ≤ −1
f) y[n] = x [n] ⋅ x [n − 1]
g) y[n] = x [1 − n]
h) y (t ) =
t
∫e
− (t −τ )
−∞
1
i) y[n] = ∑
k = −∞ 2
n
n− k
⋅ x[k ]
j) y (t ) =
Pág.
2
dx (t )
dt
⋅ x(τ ) ⋅ dτ
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
x [n + 1] : n ≥ 0
k) y[n] =
: n ≤ −1
x [n]
l) y (t ) = x( 2t )
m) y[n] = x [2n ]
n
x
: n par
n) y[n] = 2
0
: n impar
[Sol.: (a) Invertible, y (t ) = x( t + 4 ) ; (b) No invertible, x1 (t ) = x (t ) , x 2 (t ) = x( t ) + 2π ;
(c) No invertible, x1 [n] = δ [n] , x 2 [n] = 2 ⋅ δ [n ] ; (d) Invertible, y (t ) = dx( t ) dt ;
x [n + 1] : n ≥ 0
(e) Invertible, y[n] =
; (f) No invertible, x1 [n ] = x[n] , x 2 [n] = − x[n] ;
: n<0
x [n]
(g) Invertible, y[n] = x[1 − n ] ; (h) Invertible, y (t ) = x(t ) + dx(t ) dt ; (i) Invertible,
y[n] = x [n] − 0'5 ⋅ x[n − 1] ; (j) No invertible, x1 (t ) = x (t) , x 2 (t ) = x (t) + cte. ;
(k) No invertible, x1 [n] = δ [n] , x 2 [n] = 2 ⋅ δ [n] ; (l) Invertible, y (t ) = x(t / 2) ;
(m) No invertible, x1 [n ] = δ [n ] + δ [n − 1] , x 2 [n] = δ [n] ; (n) Invertible, y[n] = x[2n ] ]
[P 1.30 de Oppenheim]
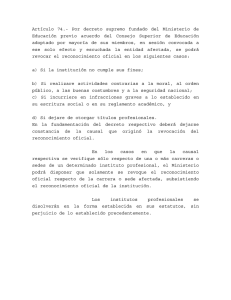
6. En
este problema, ilustramos una de las consecuencias más importantes de las
propiedades de linealidad y de invarianza en el tiempo. Específicamente, una vez que
conocemos la respuesta de un sistema lineal invariante en el tiempo (LTI) a una sola
entrada o las respuestas a varias entradas, podemos calcular de manera directa las
respuestas a muchas otras señales de entrada.
a) Considere un sistema LTI cuya respuesta a la señal x1 ( t ) en la Figura 6.A(a) sea la
señal y1 (t ) ilustrada en la Figura 6.A(b). Determine y dibuje cuidadosamente la
respuesta del sistema a la entrada x 2 (t ) dibujada en la Figura 6.A(c).
b) Determine y dibuje la respuesta del sistema considerado en la parte (a) para la
entrada x 3 ( t ) mostrada en la Figura 6.A(d).
[Sol.:
y2 (t)
2
y3( t)
1
2
0
1
2
3
4
t
-1
-1
0
1
2
t
-2
]
[P 1.31 de Oppenheim]
Pág.
3
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
x 1(t)
y 1(t)
2
1
1
0
1
2
0
t
1
2
(a)
t
(b)
x 2(t)
x 3(t)
2
1
1
-1
0
1
2
3
4
-1
t
0
1
2
3
4
t
-1
(c)
(d)
Figura 6.A
7.
a) ¿Es verdadero o falso el siguiente enunciado?
La interconexión en serie de dos sistemas lineales e invariantes en el tiempo es también
un sistema lineal e invariante en el tiempo.
b) ¿Es verdadero o falso el siguiente enunciado?
La interconexión en serie de dos sistemas no lineales es también un sistema no lineal.
c) Considere tres sistemas con las siguientes relaciones entrada−salida:
Sistema 1:
n
x
: n par
y[n] = 2
0
: n impar
Sistema 2:
y[n] = x[n] +
Sistema 3:
y[n] = x [2n ]
1
1
⋅ x [n − 1] + ⋅ x[n − 2]
2
4
Pág.
4
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
Suponga que estos sistemas están conectados en serie como se muestra en la Figura 7.A.
Determine la relación entrada−salida para el sistema total. ¿El sistema es lineal? ¿Es
invariante?
x[n]
Sistema 1
Sistema 2
Sistema 3
y[n]
Figura 7.A
[Sol.: (a) Verdadero; (b) Falso; (c) y[n] = x[n ] +
[P 1.42 de Oppenheim]
1
⋅ x[n − 1] , Sí, Sí]
4
8.
a) Considere un sistema invariante en el tiempo con entrada x (t ) y salida y (t ) .
Demuestre que si x (t ) es periódica con periodo T, entonces también lo es y (t ) .
Demuestre que el resultado también se cumple en tiempo discreto.
b) Dé un ejemplo de un sistema invariante en el tiempo y una señal x (t ) de entrada no
periódica tal que la correspondiente salida y (t ) sea periódica.
[Sol.: (b) x (t ) = t , y (t ) = sen (x (t ) ) ]
[P 1.43 de Oppenheim]
9.
a) Demuestre que la causalidad para un sistema lineal continuo es equivalente a la
siguiente afirmación: “Para cualquier tiempo t0 y cualquier entrada x (t ) tales que
x (t ) = 0 para t < t 0 , la salida correspondiente y (t ) también debe ser 0 para t < t 0 ”.
b) Encuentre un sistema no lineal que satisfaga la condición anterior pero que no sea
causal.
c) Encuentre un sistema no lineal que sea causal pero que no satisfaga la condición.
d) Muestre que la invertibilidad para un sistema lineal discreto es equivalente a la
siguiente afirmación: “La única entrada que produce y[n] = 0 para todo ‘n’ es
x[n] = 0 para todo n”. La afirmación análoga también es válida para un sistema
lineal continuo.
e) Encuentre un sistema no lineal que satisfaga la condición de la parte (d) pero que no
sea invertible.
[Sol.: (b) Por ej.: y (t ) = x(t ) ⋅ x(t + 1) ;
y[n] = (x [n ]) ]
(c) Por ej.: y (t ) = x(t ) + 1 ;
2
[P 1.44 de Oppenheim]
Pág.
5
(e) Por ej.:
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
10.
Considere una entrada x[n] y una respuesta al impulso unitario h[n] dadas por:
1
x[n] =
2
n −2
⋅ u[n − 2]
h[n] = u[n + 2]
Determine y dibuje la salida y[n] = x[n ]* h[n] .
1 n+1
[Sol.: y[n] = 2 ⋅ 1 − ⋅ u[n] ]
2
[P 2.3 de Oppenheim]
11.
Un sistema lineal “S” tiene la relación
∞
y[n] = ∑ x[k ] ⋅ g [n − 2 k ]
k = −∞
entre la entrada y la salida, donde g [n] = u [n] − u[n − 4] .
a)
b)
c)
d)
Determine y[n] cuando x[n] = δ [n − 1] .
Determine y[n] cuando x[n] = δ [n − 2] .
¿S es LTI?
Determine y[n] cuando x[n] = u[n ] .
[Sol.: (a) y[n] = u [n − 2] − u [n − 6] ; (b) y[n] = u [n − 4 ] − u[n − 8] ; (c) No;
(d) y[n] = 2 ⋅ u [n] − δ [n] − δ [n − 1] ]
[P 2.7 de Oppenheim]
12.
Suponga que
1 : 0 ≤ t ≤ 1
x (t ) =
0 : resto
y h (t ) = x(t α ) donde 0 < α ≤ 1 .
a) Determine y dibuje y (t ) = x(t ) * h (t ) .
Pág.
6
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
b) Si dy (t ) dt contiene sólo tres discontinuidades, ¿cuál es el valor de α?
[Sol.:
t
α
(a)
y (t ) =
1 + α − t
0
(b)
α = 1]
[P 2.10 de Oppenheim]
13.
a)
:
:
:
:
0≤ t ≤α
α ≤ t ≤1
1 ≤ t ≤ (1 + α )
resto
Calcule la convolución y[n] = x[n ]* h[n] de los siguientes pares de señales:
x[n] = α n ⋅ u[n ]
α≠β
h[n] = β n ⋅ u[n]
b) x[n] = h[n ] = α n ⋅ u [n]
n
1
x[n] = − ⋅ u[n − 4]
c)
2
h[n] = 4 n ⋅ u [2 − n ]
d) x[n] y h[n] son como se muestran en la Figura 13.A.
x[n]
1
-1 0
1 2 3 4 5 6
h[n]
1
-1 0
1 2 3 4 5 6 7
8 9 10 11 12 13 14 15 16 17
Figura 13.A
[Sol.: (a) y[n] =
β n+1 − α n+1
⋅ u[n] ; (b) y[n] = α n ⋅ (1 + n) ⋅ u[n] ;
β −α
Pág.
7
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
4n
: n≤6
4.608
y[n] =
;
n
8 ⋅ − 1 ⋅ 64 : n > 6
9 2
(d) y[n] = h[n ] + h[n − 1] + h[n − 2] + h[n − 3] + h[n − 4] ]
(c)
(d)
[P 2.21 de Oppenheim]
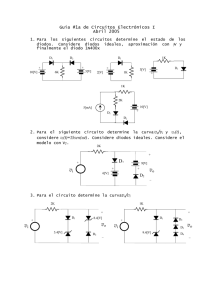
14.
Para cada uno de los siguientes pares de formas de ondas, use la integral de
convolución para encontrar la respuesta y (t ) a la entrada x (t ) del sistema LTI cuya
respuesta al impulso es h (t ) .
a)
b)
x (t ) = e −αt ⋅ u (t )
para α ≠ β , y para α = β
h (t ) = e − βt ⋅ u (t )
x (t ) = u (t ) − 2 ⋅ u( t − 2) + u (t − 5)
h (t ) = e 2t ⋅ u (1 − t )
c) x (t ) y h (t ) son como en la Figura 14.A(a).
d) x (t ) y h (t ) son como en la Figura 14.A(b).
e) x (t ) y h (t ) son como en la Figura 14.A(c).
e −αt ⋅ t ⋅ u( t )
: α=β
[Sol.: (a) y (t ) = e −αt
;
⋅ e (β −α )⋅ t − 1 ⋅ u ( t ) : α ≠ β
β −α
(
(
(
(
)
)
)
1 2t
2 ⋅( t − 2 )
+ e 2⋅( t− 5)
2 ⋅ e − 2 ⋅ e
1
2
2⋅( t −2 )
+ e 2⋅( t −5)
(b) y (t ) = 2 ⋅ e − 2 ⋅ e
1 2⋅ (t −5)
− e2
⋅e
02
(c)
0
1
⋅ [1 − cos (π ⋅ (t − 1) )]
π
y(t ) =
1
⋅ [cos (π ⋅ (t − 3)) − 1]
π
0
)
: t ≤1
: 1≤ t ≤ 3 ;
: 3≤ t ≤ 6
: t>6
: t ≤1
: 1≤ t ≤3
: 3≤t ≤ 5
;
: t>5
Pág.
8
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
1
1
1
2
− t + t + 4 : − 2 < t < 2
(d) y (t ) = x(t ) ; (e) y (t ) =
, periodo “2” ]
7
1
3
t 2 − 3t +
:
<t<
4
2
2
[P 2.22 de Oppenheim]
x(t)
h(t)
1
0
1
Un periodo de sen(πt)
1
2
t
0
1
0
1
2
3
t
(a)
x(t)
h(t)
4/3
Pendiente = a
b
2
t
t
-1/3
(b)
x(t)
h(t)
1
-1
0
1
1
2
3
0
t
1
t
-1
(c)
Figura 14.A
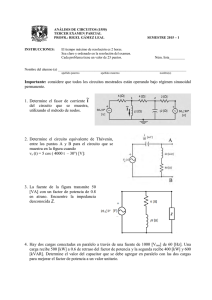
15.
Examine la interconexión en cascada de los tres sistema LTI causales ilustrados
en la Figura 15.A(a). La respuesta al impulso h2 [n ] es:
h2 [n ] = u[n] − u [n − 2 ]
y la respuesta total al impulso es como se muestra en la Figura P55(b).
a) Encuentre la respuesta al impulso h1 [n] .
b) Encuentre la respuesta del sistema total a la entrada
Pág.
9
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
x[n] = δ [n ] − δ [n − 1]
[Sol.: (a) h1 [0 ] = 1 , h1 [1] = 3 , h1 [2] = 3 , h1 [3] = 2 , h1 [4] = 1 ; (b) y[n] = h[n ] − h[n − 1] ]
[P 2.24 de Oppenheim]
x[n]
h1 [n]
h 2[n]
h2 [n]
y[n]
(a)
h[n]
11
10
8
5
4
1
-1 0
1
1 2
3 4
5 6 7
n
(b)
Figura 15.A
16.
Considere las respuestas al impulso de los siguientes sistemas LTI discretos.
Determine si cada sistema es causal y/o estable.
n
1
a) h[n] = ⋅ u[n]
5
b) h[n] = (0'8) n ⋅ u[n + 2]
n
1
c) h[n] = ⋅ u[− n ]
2
d) h[n] = (5) n ⋅ u [3 − n]
n
1
e) h[n] = − ⋅ u[n] + (1'01) n ⋅ u[n − 1]
2
n
1
f) h[n] = − ⋅ u[n] + (1'01) n ⋅ u[1 − n]
2
n
1
g) h[n] = ⋅ u[n − 1]
3
Pág.
10
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
[Sol.: (a) C,E; (b) NC, E; (c) NC, NE; (d) NC, E; (e) C, NE; (f) NC, E; (g) C,E ]
[P 2.28 de Oppenheim]
17.
a) Considere un sistema LTI con entrada y salida relacionadas a través de la ecuación:
y (t ) =
t
∫e
− (t −τ )
⋅ x (τ − 2) ⋅ dτ
−∞
¿Cuál es la respuesta al impulso de este sistema?
b) Determine la respuesta del sistema cuando la entrada x (t ) es como se muestra en la
Figura 17.A.
x(t)
1
-1
0
1
2
t
Figura 17.A
0
[Sol.: (a) h (t ) = e
⋅ u( t − 2) ; (b) y (t ) = 1 − e − (t −1)
e − (t − 4) − e − ( t−1)
[P 2.40 de Oppenheim]
− (t − 2 )
: t <1
: 1≤t ≤ 4 ]
: t>4
18.
Determine si cada una de las siguientes afirmaciones concernientes a los
sistemas LTI son verdaderas o falsas:
a) Si h (t ) es la respuesta al impulso de un sistema LTI y h (t ) es periódica y diferente
de cero, el sistema es inestable.
b) El inverso de un sistema LTI causal es siempre causal.
c) Si h[n] ≤ K para cada n, donde K es un número dado, entonces el sistema LTI cuya
d)
e)
f)
g)
respuesta al impulso sea h[n] será estable.
Si un sistema LTI discreto tiene una respuesta al impulso h[n] de duración finita, el
sistema es estable.
Si un sistema LTI es causal, es estable.
La conexión en cascada de un sistema LTI no causal con uno causal es
necesariamente no causal.
Un sistema LTI continuo es estable si y sólo si su respuesta al escalón s(t ) es
absolutamente integrable, esto es, si y sólo si:
Pág.
11
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
+∞
∫ s (t ) ⋅ dt < ∞
−∞
h) Un sistema LTI discreto es causal si y sólo si su respuesta al escalón s[n ] es cero
para n < 0 .
[Sol.: (a) V; (b) F; (c) F; (d) V; (e) F; (f) F; (g) F; (h) V]
[P 2.48 de Oppenheim]
Pág.
12
SISTEMAS Y CIRCUITOS ~ PROBLEMAS
Curso Académico 2003−2004
Pág.
13