20 Ingeniería de Control Presentación Capitulo 4 Sesión 20 Enero
Anuncio

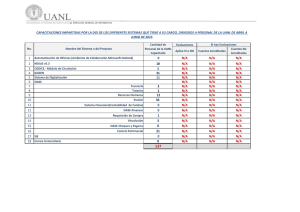
Capítulo 4 Sesión 20 UANL UANLFIME F IME #1 INGENIERÍ INGENIERÍA DE CONTROL CAPÍ CAPÍTULO 4 Controladores Comerciales y Redes Compensadoras Sesió Sesión 20 Objetivo: El objetivo de este apartado es dotar a los alumnos de los conocimientos y las habilidades necesarias para que adquiera la Competencia de reconocer las estrategias de control analó analógico lineal bá básicas, demostrando matemá matemáticamente los efectos que producen en el comportamiento temporal de los sistemas y las contrapartes fí físicas que sin las cuales la estrategia de control no se podrí podría realizar. Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #2 Curva de operació operación del El Amplificador Operacional. Amplificador Operacional. Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #3 Conexió El Amplificador Operacional, Conexión bá básica de un Amplificador Operacional. conexió conexión con varias entradas. Zf Vo =− Vi Zi Zf Zf Vo = − V1 + V2 Z Z 1 2 Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #4 Controlador P M ( s) = K p [ R ( s) − B ( s)] M ( s) = Rf Ri ( R( s) − B( s)) Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #5 Controlador PI M (s) = K p (S + 1 S Ki ) [ R ( s ) − B ( s)] Rf s + 1 Ri R f C M ( s) = ( R ( s) − B ( s) ) s Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #6 Controlador PD M ( s) 1 = K p Kd s + E ( s) K d R3 1 M (S ) R2 (S + R1C ) =− E(S ) (S + 1R1C + 1R2C ) Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #7 Controlador PID 1 1 K p Kd s 2 + s+ Kd K d K i M ( s) = E ( s) s Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #8 Controlador PID R 1 1 1 3 2 s +( + )s+ R R C R C R C R C M ( s) 2 3 2 1 1 1 1 3 2 =− E ( s) 1 1 s s + + R C R C 1 1 2 1 Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #9 Redes Compensadoras: Red Compensadora de Adelanto: ( ) ( ) d v −v + 1 v −v = 1 v C dt o o i R1 i R2 o C s [Vi ( s) − Vo ( s)] + R1 [Vi ( s) − Vo ( s)] = R1 Vo ( s) 1 2 Vo ( s) = Vi ( s) s+ s+ 1 R1 C 1 R1 C + 1 = s+a s+b R2 C Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez UANL UANLFIME F IME Controladores Comerciales y Redes Compensadoras Redes Compensadoras: i R1 + Red Compensadora de Atraso: Capítulo 4 Sesión 20 #10 1 t i dt + iR2 = vi C ∫0 1 R1 + R2 + I ( s) = Vi ( s) sC 1 Vo ( s) = R2 + I ( s) sC R2 1 (s + ) a ( s + b) R2 C Vo ( s) R1+ R2 Patraso = = = b 1 (s + a) Vi ( s) (s + ) R2 + R2 C ( UANL UANLFIME F IME ) Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez Controladores Comerciales y Redes Compensadoras Capítulo 4 Sesión 20 #11 Redes Compensadoras: Red Compensadora de Atraso Adelanto: ( ) ( ) d v −v + 1 v −v =i C1 dt o o i R1 i 1 t C2 ∫0 i dt + i R2 = vo C1 s [Vi ( s) − Vo ( s)] + R1 [Vi ( s) − Vo ( s)] = 1 1 R2 + 1 sC Vo ( s) 2 Vo ( s ) = Vi ( s) 1 1 )( s + ) R1C1 R2 C 2 ( s + a1 )( s + b2 ) = 1 1 1 ( s + b1 )( s + a 2 ) 1 S +( + + )s + R C R C R1C1 R2 C2 R2 C1 1 1 2 2 (s + Ingenierí Ingeniería de Control M.C. Manuel Amarante Rodrí Rodríguez