MEDIDOR DE DISTANCIA POR ULTRASONIDO
Anuncio

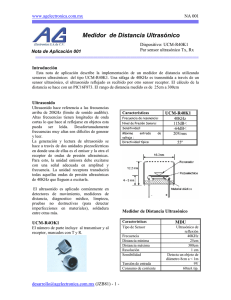
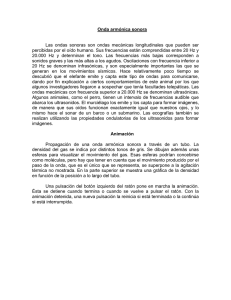
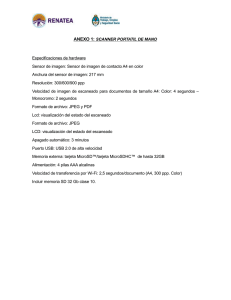
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD PROFESIONAL ADOLFO LÒPEZ MATEOS INGENIERIA EN COMUNICACIONES Y ELECTRÓNICA “MEDIDOR DE DISTANCIA POR ULTRASONIDO” QUE PARA OBTENER EL TITULO DE INGENIERO EN COMUNICACIÓNES Y ELECTRÓNICA P R E S E N T A N : MARIANA MARTÍNEZ RODRÍGUEZ JAZMÍN GONZÁLEZ GÓMEZ A S E S O R E S : ING. EDGAR ROMAN CALDERÓN DÍAZ ING. PATRICIA LORENA RAMÍREZ RANGEL MÉXICO, D.F. 28 DE MAYO DE 2014 DEDICATORIA Para hijos Alejandro Eissa González y Meztli Eissa González que amo con todo mi corazón. Para mi esposo Alejandro Eissa Beltrán que estuvo siempre a mi lado para brindarme su apoyo y comprensión en los momentos más difíciles de mi carrera. Para mis padres Caritina Gómez Chávez y Salvador González García que siempre creyeron en mí y por su incondicional apoyo que mantienen a través del tiempo. Gracias por ser mi inspiración y parte importante de mi desarrollo profesional. JAZMÍN GONZÁLEZ GÓMEZ AGRADECIMIENTOS En primer lugar agradezco a mi Alma Mater el Instituto Politécnico Nacional y con gran orgullo a la Escuela Superior de Ingeniería Mecánica y Eléctrica por brindarme mi formación académica. De forma muy especial agradezco al Ingeniero Edgar Edmundo Flores Díaz por todo el conocimiento que me proporciono durante mi carrera, por su dedicación y apoyo a lo largo de este proyecto. Resalto mi agradecimiento a mi asesor el Ingeniero Edgar Román Calderón Díaz por todo su apoyo académico. Por último agradezco al Ingeniero José Reyes Aquino y al laboratorio de electrónica por las facilidades brindadas para el desarrollo de este trabajo de tesis. JAZMÍN GONZÁLEZ GÓMEZ I DEDICATORIA A mis amados padres Guadalupe Rodríguez Hernández y Oscar Alberto Martínez Vargas, quienes me apoyaron y se esforzaron; para que lograra ser la mujer que ahora soy. Gracias por sus amor, oraciones, consejos, trabajo, sacrificios y motivarme constantemente para que pueda seguir logrando mis sueños. A mi linda y adorada hermana Ana María Martínez Rodríguez, por tus grandes manifestaciones de cariño, por ser mi confidente y acompañante de travesuras. También te agradezco tus consejos y hasta tus regaños, gracias por creer en mi hermosa hermana. A mi cuñis Luis Alberto Ortiz Estrada, por brindarme su cariño, apoyo y todos los consejos me has dado. Por estar con nosotras en los momentos más difíciles y los más felices. Y en especial por amar a mi gran tesoro, que es mi hermana. A mi abue Vicente Rodríguez Miguel, por su cariño, anécdotas, experiencias y hermosos momentos que me regalo en especial en estos últimos años. Y por último y no por eso el menos importante, a Dios; por ser mi fortaleza espiritual, por enseñarme a levantarme día con día y en especial darme el regalo de estar viva, a pesar de la adversidad. Mariana Martínez Rodríguez II AGRADECIMIENTOS Agradezco a Dios y a mi familia, que fueron la base para que culminara esta etapa de mi vida; este logro es gracias a todos ustedes. Nunca dejare de agradecerles todo el apoyo y la confianza que depositaron en mí. Agradezco al Instituto Politécnico Nacional por ser mi Alma Mater, por permitirme ser parte de esta comunidad, tener el honor y prestigio de poder representarla gracias a todas las enseñanzas o formación que me dio desde el nivel medio superior hasta concluir hoy mi ingeniería. Agradeciendo de una manera muy especial a todos y cada uno de mis profesores de la Escuela Superior de Ingeniería Mecánica y Eléctrica que con paciencia nos enseñaron y transmitieron sus conocimientos para cumplir el lema de mi instituto “La Técnica al servicio de la Patria” Agradezco a todas aquellas personas que me quieren sinceramente y que están hasta el día de hoy a mi lado (amigos, compañeros y profesores,….) que me han apoyado y ayudado durante todos estos años, haciéndome más fuerte con sus palabras; enviándome las mejores energías desde donde se encuentran. Muy en especial a mi querida Amiga Jazmín González Gómez, quien siempre estuvo apoyándome en todo momento y es una gran mujer. Agradezco a Marina Uribe, por el apoyo que me brindo en una etapa de mi vida muy importante; así como a toda su familia y a Gerardo Cortes por ser un gran ejemplo de vida. Agradezco a Iván Pérez Jiménez, por ser una persona muy especial, haber estado en los momentos más difíciles de mi vida y compartir extraordinarios momentos; pero muy en especial por ser un gran amigo. Agradezco a los asesores y jurado de tesis por su tiempo, apoyo, conocimientos y su constante orientación para que esta tesis concluyera de manera satisfactoria. Mariana Martínez Rodríguez III NOMENCLATURA Λ Longitud de onda Α Ángulo de reflexión Θ Ángulo de incidencia Φ Ángulo de refracción Hz Hertz 3 K Kilo 1x10 µ micro 1x10 M mili 1x10 Cm centimetro Mm milimetros -6 -3 A Ampere V Volts S Segundos IV GLOSARIO Ángulo de Incidencia: Es el punto de reflexión donde se ubica la normal de luz sobre algún objeto reflectado cóncavo o convexo. Ángulo de Reflexión: Angulo formado entre la dirección de un haz luminoso reflejado y la perpendicular a la superficie reflectora. Es igual al ángulo de incidencia. Cavitación: es un efecto hidrodinámico que se produce cuando el agua o cualquier otro fluido en estado líquido pasa a gran velocidad por una arista afilada, produciendo una descompresión del fluido debido a la conservación de la constante de Bernoulli. Difracción: Fenómeno por el cual se produce una desviación de los rayos luminosos cuando pasan por un cuerpo opaco o por una abertura de diámetro menor o igual que la longitud de onda. Eco: Fenómeno acústico en que se produce la repetición de un sonido al chocar las ondas sonoras contra un obstáculo y reflejarse hasta llegar al lugar donde se ha emitido. Interferencia: efecto que se produce cuando dos o más ondas se solapan o entrecruzan. Cuando las ondas interfieren entre sí, la amplitud (intensidad o tamaño) de la onda resultante depende de las frecuencias, fases relativas (posiciones relativas de crestas y valles) y amplitudes de las ondas iniciales . Impedancia Acústica (Z): es una propiedad de estado intensiva. Es la resistencia que opone un medio a las ondas que se propagan sobre este y por lo tanto es equivalente a la impedancia eléctrica, es decir una forma de disipación de energía de las ondas que se desplazan en un medio. Longitud de onda: es la distancia real que recorre una perturbación (una onda) en un determinado intervalo de tiempo. Ese intervalo de tiempo es el transcurrido entre dos máximos consecutivos de alguna propiedad física de la onda. Onda: Las ondas son una perturbación periódica del medio en que se mueven. En las ondas longitudinales, el medio se desplaza en la dirección de propagación. En las ondas transversales, el medio se desplaza en ángulo recto a la dirección de propagación. Propagación de onda: es un fenómeno físico fundamental, las ondas sobre la superficie del agua y los terremotos; las ondulaciones en resortes, las ondas de luz, las ondas de radio, las ondas sonoras, etc. Resonancia: es el reforzamiento de ciertas amplitudes sonoras como resultado de la coincidencia de ondas similares en frecuencias, es un caso particular de resonancia mecánica. Reflexión: fenómeno por el cual una onda se absorbe o regresa. V Refracción: es un fenómeno que afecta a la propagación del sonido, y que consiste en la desviación que sufren las ondas en la dirección de su propagación, cuando el sonido pasa de un medio a otro distinto. Sensor: Dispositivo que capta magnitudes físicas (variaciones de luz, temperatura, sonido, etc.) u otras alteraciones de su entorno. Transductor: es un dispositivo que convierte una señal de un tipo en otra (ondas sonoras, corriente, voltaje, vibraciones en ondas electromagnéticas) Transmisor: Aparato que sirve para transmitir o emitir señales eléctricas o telefónicas. Receptor: Aparato que recibe señales eléctricas, telegráficas, telefónicas o radiofónicas y las convierte en sonidos o señales que se pueden oír o ver. Umbral: es la cantidad mínima de señal que ha de estar presente para ser registrada por un sistema. Ultrasonido: es una onda sonora cuya frecuencia supera el límite perceptible por el oído humano (es decir, el sonido no puede ser captado por las personas ya que se ubica en torno al espectro de 20.000 Hz). VI ÍNDICE GENERAL CAPÍTULO I. ANTECEDENTES 1,1 1,2 1,3 1,4 ANTECEDENTES DETECCIÓN Y MEDIDA DE LOS ULTRASONIDOS EFECTO DE LOS ULTRASONIDOS APLICACIONES DE LOS ULTRASONIDOS 2 3 4 5 CAPÍTULO II. DISEÑO Y CONSTRUCCIÓN 2,1 EL HAZ ULTRASÓNICO 2.1.1 2.1.2 2.1.3 2.1.4 2,2 2,3 2,4 2,5 7 ZONA MUERTA ZONA DE CAMPO CERCANO ZONA DE CAMPO LEJANO CARACTERÍSTICAS DE LOS TRANSDUCTORES 8 9 9 10 FUNCIONAMIENTO BÁSICO DE LOS ULTRASONIDOS PROBLEMAS CON LOS ULTRASONIDOS SENSOR ULTRASÓNICO HC-RS04 DISEÑO DEL MEDIDOR DE DISTANCIA 11 11 13 14 2.5.1 2.5.2 2.5.3 2.5.4 2.5.5 15 16 16 17 17 ETAPA DE SENSADO FUNCIONAMIENTO DEL SENSOR ULTRASÓNICO HC- SR04 ETAPA DE PROCESAMIENTO ETAPA DE ALIMENTACIÓN ETAPA DE VISUALIZACIÓN 2,6 CONSTRUCCION DEL MEDIDOR DE DISTANCIA 19 CAPÍTULO III. PRUEBAS Y RESULTADOS 3,1 PRUEBA DEL MODULO DE ULTRASONIDO HC-SR04 3,2 PRUEBAS DEL MEDIDOR DE DISTANCIA 3,3 COSTOS DE CONSTRUCCIÓN 22 22 24 CONCLUSIONES 25 BIBLIOGRAFÍA 26 APENDICE A. HOJAS DE DATOS DEL SENSOR ULTRASÓNICO HC- SR04 APENDICE B. HOJAS DE DATOS DEL MICROCONTROLADOR TEXAS INSTRUMENT MS APENDICE C. HOJAS DE DATOS DEL Display LCD de 16X2 APENDICE D. HOJAS DE DATOS DEL Regulador de voltaje 7805 y 7833 APENDICE E. CÓDIGO DEL PROGRAMA DEL MEDIDOR DE DISTANCIA APENDICE F. HOJAS DE DATOS DEL TRANSISTOR BC548 27 29 35 43 49 52 ÍNDICE DE FIGURAS Figura 2.1 Figura 2.2 Figura 2.3 Figura 2.4 Figura 2.5 Figura 2.6 Figura 2.7 Figura 2.8 Figura 2.9 Figura 2.10 Figura 2.11 Figura 2.12 Figura 2.13 Figura 2.14 Figura 2.15 Figura 2.16 Figura 2.17 Figura 2.18 Figura 2.19 Figura 2.20 Figura 2.21 Figura 2.22 Figura 3.1 Figura 3.2 Figura 3.3 Figura 3.4 Acción de una onda en una superficie límite Acción dispersión del haz para varias frecuencia Haces secundarios Diagrama del haz ultrasónico mostrando las diferentes zonas de intensidad Geometría de un haz ultrasónico Distribución de la presión acústica a lo largo del recorrido del haz Emisión de un pulso de ultrasonido Incertidumbre angular en la medida de un ultrasonido Distancia de detección Falsos ecos Reflexión de las ondas Dimensión y precisión del sensor Diagrama a bloques del medidor de distancia Configuración del sensor HC-SR04 y su funcionamiento Implementación del microcontrolador MSP430G2553 con el sensor HC-SR04 Diagrama a bloques de la etapa de alimentación Configuración de la pantalla LCD Diagrama eléctrico del medidor de distancia Circuito impreso Circuito soldado con componentes Dimensiones de Prototipo Diagrama de flujo del medidor de distancia Pulso de disparo y salida del medidor de distancia Pruebas de medición A Pruebas de medición B Pruebas de medición C 6 7 7 8 8 9 10 11 11 12 13 13 14 15 16 16 17 18 18 19 20 21 22 24 25 26 INDICE DE TABLAS Tabla 2.1 Descripción de las terminales pantalla LCD 16X2 Tabla 3.1 Cuadro de Resumen de Pruebas Tabla 3.2 Costo de Componentes del Dispositivo 17 24 25 OBJETIVO GENERAL Diseñar y construir un medidor de distancia a través de ondas de ultrasonido, implementado con el microcontrolador MSP4302553 y para visualizar la información en un display de cristal líquido. OBJETIVOS PARTICULARES x Poner en marcha el módulo de ultrasonido, utilizando un microcontrolador MSP4302553, para procesar la señal de dicho módulo. x Obtener mediciones de distancia a través de ondas ultrasónicas. x Interpretar los datos obtenidos, mostrando la información necesaria en un display de cristal líquido (LCD) x Diseñar y construir un prototipo de bajo costo, portátil y fácil de utilizar. X JUSTIFICACIÓN Debido a la gran diversidad de instrumentos de medición de distancia en el mercado, es necesario diseñar un dispositivo de fácil implementación y de bajo costo de construcción. Este prototipo está diseñado para detectar objetos sólidos a distancia, con la finalidad de adaptarlo a diversas áreas, como la industria o la vida cotidiana, con la posibilidad de adicionar nuevas herramientas para aplicaciones futuras. XI CAPÍTULO I. ANTECEDENTES 1.1 ANTECEDENTES Se denomina ultrasonido, tanto al estudio como a la aplicación de una vibración de las partículas (suspendidas en el aire) cuya frecuencia es superior al umbral de audición humana, o sea 20 KHz. La existencia de los ultrasonidos se conoce desde el año 1883, por los trabajos realizados por Galton relacionados con los límites de audición humana, al experimentar un resonador de alta frecuencia para medir el límite superior de frecuencia de respuesta del oído humano. El pequeño valor de la longitud de onda de los ultrasonidos, es el factor que ha permitido en muchos casos la aplicación de estas ondas. Su propagación en los diferentes medios materiales es análoga a la propagación de las ondas sonoras dentro del margen audible, aunque con una absorción mucho mayor, por lo que el aire se puede considerar prácticamente opaco para los ultrasonidos. Los métodos para producir estas vibraciones son muy variados, dependiendo de su uso. Los procedimientos más conocidos y estudiados son los que se fundan en la variación de las dimensiones de un sólido al someterlo a diferentes campos. Uno de lo más generales es el que se refiere a los materiales que presentan la “piezoelectricidad”, u otros fenómenos análogos, se le da este nombre al fenómeno que aparece en ciertos materiales naturales y sintéticos, al cambiar de dimensiones cuando se aplica una carga eléctrica a las caras del cristal obtenido de estos mismos. La transformación de energía mecánica en eléctrica se denomina efecto piezoeléctrico directo, y a la producción de energía mecánica al aplicar un potencial eléctrico, se denomina efecto piezoeléctrico inverso. El efecto piezoeléctrico directo fue descubierto por los hermanos Curie en 1880, y el efecto piezoeléctrico inverso lo predijo Lippman en 1881, completando su estudio W. Voigt en 1890 [2]. El primer intento práctico de aplicar el efecto piezoeléctrico como emisor de ondas ultrasónicas se debe a Langevin en Francia, quien lo empleó durante la primera guerra mundial para sondeos submarinos, utilizando una onda continua para detectar submarinos mediante el eco de dicha onda. Richarson en 1912 y Fessenden en 1914 propusieron el procedimiento para localizar icebergs mediante ultrasonidos. Posteriormente en 1933 Mulhauser estudió la posibilidad de aplicar estas ondas a la inspección de materiales en la industria metalúrgica, debiéndose a Firestone en 1942 la utilización de impulsos para la inspección de materiales. El empleo de ondas continuas para agitación, fue estudiado por Wood y Loomis en 1927. La idea de acoplar los transductores con líquidos para la inspección de materiales se debe a Sokolov, permitiendo este método la detección ultrasónica de grietas en los sismos [2]. Los cristales que presentan el efecto piezoeléctrico son los que no tienen centro de simetría y destacan el cuarzo, la sal de Rochelle, el titanio de bario, el sulfato de litio, etc. Si se aplicamos en vez de un campo continuo, un campo alterno, el efecto producido del rango ultrasónico, estos cristales piezoeléctricos vibrarán a una frecuencia propia de los ultrasonidos y transmitirán su vibración al medio que los rodea [2]. Los progresos en la teoría y aplicaciones de los ultrasonidos llevan un crecimiento exponencial desde hace años, existiendo una enorme variedad de aparatos que responden a especificaciones muy concretas. El interés práctico del empleo de los 1 ultrasonidos reside, bien sea en el aprovechamiento de la energía transmitida, o bien en el análisis del rayo ultrasónico que pasa de un medio a otro de diferente impedancia acústica, parte de él se refleja y otra se transmite, dependiendo la relación de una a otra de las impedancias acústicas de ambos medios. De acuerdo con esto si interesa una posible máxima transmisión, se situará entre el transductor y el medio una capa líquida cuya impedancia acústica sea intermedia entre la de éste y la del medio, ya que si existiese una capa de aire una capa de aire entre ellos la transmisión sería muy incompleta o nula. Si lo que conviene es estudiar la energía transmitida a través de un material, todo el proceso se efectúa en un baño de líquido, en el cual se sitúan en el emisor y en el receptor, denominándose a este procedimiento de inmersión. En ocasiones interesa estudiar un impulso que envía un transductor emisor, que a la vez hace de receptor del impulso reflejado, llamado a este sistema método de ecos. En el procedimiento de contacto angular, en el que el rayo incide sobre la superficie con un ángulo de 30o, con el fin de propagar sólo ondas superficiales, el acoplamiento se hace mediante una pieza de forma y material apropiado. Anteriormente, se ha citado la propagación de las ondas ultrasónicas de modo continuo y por impulsos, pero existen otros procedimientos, como el de frecuencia modulada, en el que la vibración ultrasónica se transporta por otra vibración de mayor energía [2]. Las ondas ultrasónicas se pueden considerar generalmente como ondas planas. Una de las características que presentan las ondas ultrasónicas, es su propagación rectilínea, debido al pequeño valor de su longitud de onda, o sea el movimiento de la onda se transmite en línea recta, y la energía no puede desplazarse a través de discontinuidades, ésta propiedad es la que permite utilizar este tipo de ondas para localizar pequeños objetos [2]. 1.2 DETECCIÓN Y MEDIDA DE LOS ULTRASONIDOS En los casos que interesa conocer las características de un campo ultrasónico, cuya energía va a utilizarse, se disponen de medios para el conocimiento de la misma, como son los radiómetros y los micrófonos. En estudios de carácter físico en la medida de las constantes de propagación, la absorción y la velocidad, se utilizan sistemas electrónicos o bien ópticos [2]. En estudio de inspección de materias, por lo general, es medida relativa de la energía del rayo ultrasonoro, antes y después de atravesar dicho material, obteniendo conclusiones de la diferencia. En otros casos interesa simplemente la detección cualitativa del campo ultrasónico, existiendo también técnicas apropiadas como son el humo, nieblas, difracción de la luz, distorsión de la superficie de separación de dos medios, etc. [2]. Se puede clasificar también los métodos de detección y medida por el fenómeno físico que se utiliza para ello, como por ejemplo: a) Detectores mecánicos. Si se utiliza una placa o un disco en un campo ultrasónico, de tal manera que las ondas incidan sobre el disco en dirección normal, ejercen una presión sobre el mismo, de tal manera que la fuerza que produce hace que el disco gire, lo que nos permite medir la energía que incide sobre el disco, y la que se reflejada por él. Este tipo de detectores incluye uno 2 de los primeros dispositivos utilizados, como es el disco de Rayleigh o radiómetro, así como los indicadores de humo, gotas de agua, etc. b) Detectores eléctricos. Se sabe que la resistencia de un hilo fino calentado eléctricamente es proporcional al enfriamiento del hilo por el movimiento de las partículas producidas por las ondas ultrasónicas. c) Detectores calorimétricos. Se basan en el efecto de que cuando las ondas ultrasonoras son absorbidas se produce calor, pudiendo usarse este calor como una indicción de la cantidad de energía de las ondas originadas. d) Detectores ópticos. Basados en la aplicación de los ultrasonidos a la difracción de la luz en el ensayo de materiales, depende fundamentalmente del hecho de que las ondas ultrasonoras se componen de dilataciones y compresiones alternadas, que por tanto alteran la densidad del medio a través del cual pasan, de tal forma que usando un haz de luz monocromático, se observa una debido a esto un y varias líneas. Este tipo de detectores se usa para obtener fotografías de una forma de onda [2]. 1.3 EFECTO DE LOS ULTRASONIDOS a) Efectos físicos. Algunos de los efectos más conocidos son los denominados de cavitación, calentamiento local, de torsión del cuarzo y de producción de niebla. El llamado efecto de cavitación se aplica a una serie de efectos ultrasónicos que se caracterizan por la formación y destrucción de burbujas en el seno de un líquido, pudiendo estar estas burbujas vacías o llenas de un gas o vapor, la cavitación se puede formar por ultrasonidos o por otros medios, formándose experimentalmente en los lugares de máxima intensidad. El efecto calorimétrico, se conoce por los resultados experimentales que indican que a 4 MHz, la energía acústica se convierte en calor mediante una relación definida. El efecto de producción de niebla, se basa en que cuando ondas ultrasónicas intensas inciden sobre una superficie de separación entre un líquido y el aire, se lanza hacia arriba un chorro de líquido y se produce una fina niebla. b) Efectos químicos. Se sabe que los ultrasonidos producen cambios químicos, que no se pueden efectuar de ninguna otra forma. Estos cambios se atribuyen generalmente a la cavitación, existiendo varias hipótesis que intentan explicar estos fenómenos como son: aumento de temperatura, variación de presión, fenómenos eléctricos, resonancias internas, etc. además pueden variar las condiciones experimentales que afectan a los resultados, como son la frecuencia, intensidad, temperatura, presión, etc. La cavitación producida ultrasónicamente en ciertos líquidos tiene el efecto de reacciones químicas en su interior, esto se debe a la acción electrolítica provocada por la aparición de cargas eléctricas igual y opuesta en los extremos contrarios de las burbujas. c) Efectos biológicos. Se ha comprobado que los ultrasonidos de alta energía afectan a la forma de vida de pequeños animales (peces, ranas, etc.)pudiendo llegar a matarlos. Parece probable que ciertos resultados se deben a algunas de las características de los ultrasonidos, tales como: cavitación, calor generado localmente, altas presiones y aceleraciones. Mediante los ultrasonidos puede variarse el ritmo cardiaco de los animales, así como 3 producir fiebre artificial, pensando que estos fenómenos se deben a la formación de burbujas en el interior del cuerpo y a la cavitación. Como ejemplo de alguno de estos efectos se pueden citar, la destrucción de la capacidad reproductora de las células, la variación del tiempo de germinación de las semillas, etc. [2]. Los ultrasonidos adquirieron gran importancia en la medicina en los años 1949 hasta 1951, época en que este método fue puesto en práctica por primera vez para el tratamiento en numerosas afecciones. En el año de 1942 se informó por primera vez sobre las posibilidades que ofrece el ultrasonodiagnóstico. Se obtuvieron buenos resultados por primera vez mediante el procedimiento de ecos, que se empleó primeramente como método monodimencional en la región craneal, y que ha recibido el nombre de ecoencefalografía. Este procedimiento se emplea para el diagnóstico de hemorragias intracraneales, tumores y dilataciones ventriculares. Desde 1956 se utilizan ultrasonidos para el diagnóstico en oftalmología, empleándose aquí preferentemente el sistema monodimencional. Sirve para la medición de la longitud del eje óptico, desprendimientos de retina, hemorragias, cuerpos extraños intraoculares, etc. [2]. Sobre el ultradiagnóstico en el campo de la obstetricia y de la ginecología, informó por primera vez Donald en 1958, en los últimos años siguieron ponencias y trabajos de diversos autores, destacándose entre ellos los del sueco Sunden y del americano Taylor. Con auxilio del procedimiento monodimencional se indicó el diámetro biparietal del cráneo fetal en el útero. Asimismo, se desarrollaron aparatos ultrasónicos que proporcionan imágenes, con ayuda de las cuales se lograron diagnosticar tumores abdominales y reconocer embarazos, actualmente se sigue trabajando en la mejoría de las imágenes ultrasónicas [2]. 1.4 APLICACIONES DE LOS ULTRASONIDOS Entre las aplicaciones más importantes de los ultrasonidos se citan: los dispositivos de sonar (ecogoniómetro); los detectores de grietas en los materiales metálicos (opacos a las radiaciones electromagnéticas), que se basan en el hecho de que las grietas reflejan parcialmente la energía ultrasónica incidente; las “líneas de retardo” ultrasónicas (utilizadas en las calculadoras electrónicas), que se basan en el hecho de que la propagación de los ultrasonidos en los sólidos es de 100-1000 m/seg, por lo tanto inferior a la velocidad de las ondas electromagnéticas (3X108 m/seg). También se usan en la medida de propiedades elásticas de los sólidos y de materias plásticas artificiales (como altos polímeros); en el trabajo mecánico de materiales extremadamente duros, donde el utensilio se sustituye por una cabeza radiante ultrasónica con una pasta abrasiva intermedia; la producción de emulsiones entre dos líquidos de densidad diferente mediante las irradiaciones de la superficie de separación; la precipitación de partículas en suspensión en un gas por efecto de la coagulación de las mismas y que se produce por la acción de una intensa radiación ultrasónica. Además, se aplican en ciertos procedimientos metalúrgicos, como el refinado de los granos cristalinos durante el enfriamiento de las coladas fundidas, la ventilación de metales fundidos mediante irradiación por ultrasonido y la soldadura del aluminio 4 mediante la irradiación ultrasónica de las superficies que se van a soldar, para eliminar la capa superficial de óxido. Finalmente, se aplican también los ultrasonidos en bacteriología (destrucción de microorganismos) y en medicina (curación de enfermedades del oído, neuritis, periartritis, artrosis y úlceras) [3]. Existen módulos de ultrasonido como el HC-SR04, que nos permite medir distancias de hasta 3 m, la ventaja de este es que es económico y de fácil implementación, a continuación se describe dicho sensor: x x x Tienen dos transductores. Ofrece una excelente detección sin contacto (remoto) con elevada precisión y lecturas estables en un formato fácil de usar. El funcionamiento no se ve afectado por la luz solar o el material negro como telémetros ópticos (aunque acústicamente materiales suaves como telas pueden ser difíciles de detectar). 5 CAPÍTULO II. DISEÑO Y CONSTRUCCIÓN 2.1 EL HAZ ULTRASÓNICO Un haz ultrasónico se propaga a través de un material con muy poca divergencia. Aunque se puede considerar un haz así como confinado a la proyección de la cara del transductor, en realidad, siempre hay alguna expansión. Esta expansión es función de la razón λ/D, donde λ es la longitud de onda de la onda ultrasónica y D es la distancia a través de la cara del transductor. En una placa circular de cuarzo ordinaria, la energía está localizada en un cono cuyo ángulo mitad de la abertura está dado por ecuación 2.1. = 1.2 ….. Ec. 2.1 Como se puede observar en la figura 2.1 la ecuación no muestra resultados exactos, debido a que la manera en que el cristal está montado afecta a sus características radiantes. Los efectos de los bordes pueden producir haces secundarios. Figura 2.1 Acción de una onda en una superficie límite. Estos rayos secundarios no están determinados por la razón anterior, sino que tienen mayores ángulos de abertura. Sin embargo, en el trabajo práctico el haz básico es único que tiene consecuencias. Cuando las ondas ultrasónicas inciden sobre la cara de un material en el que se van a propagar, solamente el haz principal es transmitido a través de la intersuperficie y entra realmente en el medio, ya que la energía transmitida depende del ángulo con el que la onda incide. Hay una refracción tan grande en el caso ordinario de una superficie aceite- metal, que cualquier haz diverja más de un ángulo relativamente pequeño, será totalmente refractado. Este ángulo es de aproximadamente 15º respecto a la normal y está determinado por relación entre las velocidades de los 6 ultrasonidos en los dos medios: el medio donde las ondas se transmiten y el medio donde entran (figura 2.1). La figura 2.2 muestra como las partes del haz que inciden bajo un ángulo mayor que el valor crítico se desvían tanto, que no llegan a cruzar la superficie de separación. En la ecuación 2.1, “A” representa un haz refractado. El haz puede ser dispersado de otras maneras distintas a la de su divergencia normal. Por ejemplo, si el medio en que se propaga está lleno de pequeñas discontinuidades dispersas o de tamaño de grano muy grande, la energía ultrasónica se rompe, se refleja y se refracta de una manera desordenada. Esto puede ocurrir incluso entre cristales vecinos de diferentes propiedades elásticas. De esta manera, la energía puede ser difundida por reflexión continua. Esta dificultad puede ser minimizada disminuyendo la frecuencia de transmisión, aumenta con ello la anchura del haz. La figura 2.2 muestra la manera en que se distribuyen los haces de energía ultrasónica de diferentes frecuencias a partir de un cuerpo radiante. La figura 2.3 muestra los posibles efectos de la montura del elemento vibratorio en la producción de lóbulos secundarios. Además del efecto normal del haz de ultrasonidos más nítidamente [1]. Figura 2.2 Acción dispersión del haz para varias frecuencias. 7 Figura 2.3 Haces secundarios. 2.1.1 ZONA MUERTA La zona muerta se debe a la interferencia producida por las vibraciones del cristal; y su presencia en el haz, está determinada por el tiempo de oscilación, o sea, el tiempo requerido por el cristal para generar el pulso de vibración, tal como se indica en la figura 2.4. Figura 2.4 Diagrama del haz ultrasónico mostrando las diferentes zonas de intensidad. 2.1.2 ZONA DE CAMPO CERCANO El efecto producido por la zona de campo cercano o zona de Fresnel (ver figura 2.4), de un haz ultrasónico es, a veces ignorado o desconocido, teniendo una gran importancia para la validez de los resultados. La energía es irradiada en todas las direcciones, a partir del punto de origen, y la presión acústica varía presentándose con máximos y mínimos; sin embargo, el haz tendría una forma totalmente esferoidal, de no ser por la existencia de los lóbulos laterales o secundarios, que no son más que zonas de fluctuación de la intensidad, producidas por efecto de los bornes del cristal, según el principio de Huygens (figura 2.5). La zona de Fresnel, varía de acuerdo con la longitud de onda y las dimensiones del cristal. En la zona de campo cercano, por efecto de las fluctuaciones de la intensidad, es sumamente difícil lograr la detección de discontinuidades, pues se producirán indicaciones múltiples, y la amplitud de las mismas tendrá grandes variaciones de acuerdo a la distancia desde la superficie reflectora, a la cara del transductor. Figura 2.5 Geometría de un haz ultrasónico. 8 2.1.3 ZONA DE CAMPO LEJANO Inmediatamente después de la zona de interferencia, o zona de campo cercano, comienza la zona de campo lejano, o zona de Freunhofer. En ésta zona, la intensidad o la presión sonora se estabiliza, teniendo mayor magnitud alrededor del eje imaginario del haz (figura 2.4), y ya disminuyendo hacia los límites del mismo. De la misma forma, con aumentos de la distancia, desde el límite entre las zonas de campo cercano y lejano, la presión disminuye exponencialmente por efecto de varios factores de pérdidas (figura 2.6). Uno de estos factores se denomina: divergencia del haz. Figura 2.6 Distribución de la presión acústica a lo largo del recorrido del haz. La divergencia del haz, se produce por lo que conocemos como el factor de Fraunhofer. El área cubierta por el haz sonoro, en la zona de campo lejano, aumenta la distancia, lo que se traduce como dispersión de la presión acústica. 2.1.4 CARACTERÍSTICAS DE LOS TRANSDUCTORES RESOLUCION. Es la habilidad que presentan para separar o identificar las señales de indicación de varios reflectores diferentes y cercanos, en lo que a profundidad se refiere. SENSIBILIDAD. Es la habilidad de detectar discontinuidades del menor tamaño posible, característica que debe ser suministrada por el fabricante como dato de calibración [6]. ESTABILIDAD. Qué tanto se modifica con el cambio de variables ajenas a la entrada (temperatura, material, tiempo). EXACTITUD. La exactitud de la medición debe ser tan alta como fuese posible. Se entiende por exactitud que le valor verdadero de la variable se pueda detectar sin errores sistemáticos positivos o negativos en la medición. Sobre varias mediciones de la variable, el promedio de error entre el valor real y el valor detectado tendera a ser cero. 9 PRECISIÓN. La precisión de la medición debe ser tan alta como fuese posible. La precisión significa que existe o no una pequeña variación aleatoria en la medición de la variable. La dispersión en los valores de una serie de mediciones será mínima. RANGO DE FUNCIONAMIENTO. El sensor debe tener un amplio rango de funcionamiento y debe ser exacto y preciso en todo el rango. VELOCIDAD DE RESPUESTA. El transductor debe ser capaz de responder a los cambios de la variable detectada en un tiempo mínimo, lo ideal sería una respuesta instantánea. CALIBRACIÓN. El sensor debe ser fácil de calibrar. El tiempo y los procedimientos necesarios para llevar a cabo el proceso de calibración deben ser mínimos. Además, el sensor no debe necesitar una recalibración frecuente. El término desviación se aplica con frecuencia para indicar la pérdida gradual de exactitud del sensor que se produce con el tiempo y el uso, lo cual hace necesaria su recalibración. FIABILIDAD. El sensor debe tener una alta fiabilidad. No debe estar sujeto a fallos frecuentes durante el funcionamiento [7]. 2.2 FUNCIONAMIENTO BÁSICO DE LOS ULTRASONIDOS El funcionamiento básico de los ultrasonidos como medidores de distancia se muestra de una manera muy clara en la figura 2.7, donde se tiene un transmisor que emite un pulso de ultrasonido que rebota sobre un determinado objeto y la reflexión de ese pulso es detectada por un receptor de ultrasonidos. Figura 2.7 Emisión de un pulso de ultrasonido. 2.3 PROBLEMAS CON LOS ULTRASONIDOS A pesar de que su funcionamiento parece muy sencillo, existen factores inherentes tanto a los ultrasonidos como al mundo real, que influyen de una forma determinante en las medidas realizadas. Por tanto, es necesario un conocimiento de las diversas fuentes de incertidumbre que afectan a las medidas para poder tratarlas de forma adecuada, minimizando su efecto en el conocimiento del entorno que se desea adquirir. Entre los diversos factores que alteran las lecturas que se realizan con los sensores de ultrasonido cabe destacar: x El campo de actuación del pulso que se emite desde un transductor de ultrasonido tiene forma cónica, como se muestra en la figura 2.8. El eco que se recibe como respuesta a la reflexión del sonido indica la presencia del objeto 10 más cercano que se encuentra dentro del cono acústico y no especifica en ningún momento la localización angular del mismo. Aunque la máxima probabilidad es que el objeto detectado esté sobre el eje central del cono acústico, la probabilidad de que el eco se haya producido por un objeto presente en la periferia del eje central no es en absoluto despreciable y ha de ser tenida en cuenta y tratada convenientemente. ∝ = á ó. Figura 2.8 Incertidumbre angular en la medida de un ultrasonido x La cantidad de energía acústica reflejada por el obstáculo depende en gran medida de la estructura de su superficie. Para obtener una reflexión altamente difusa del obstáculo, el tamaño de las irregularidades sobre la superficie reflectora debe ser comparable a la longitud de onda de la onda de ultrasonido incidente. x En los sensores de ultrasonido de bajo costo se utiliza el mismo transductor como emisor y receptor. Tras la emisión del ultrasonido se espera un determinado tiempo a que las vibraciones en el sensor desaparezcan y esté preparado para recibir el eco producido por el obstáculo. Esto implica que existe una distancia mínima d (proporcional al tiempo de relajación del transductor) a partir de la cual el sensor mide con precisión (figura 2.9). Por lo general, todos los objetos que se encuentren por debajo de esta distancia, d, son interpretados por el sistema como que están a una distancia igual a la distancia mínima. d Figura 2.9 Distancia de detección. 11 x La sensorización mediante ultrasonidos se ve afectada por factores medio ambientales y por factores relacionados con el objeto reflector. En el caso de aplicaciones de medición de distancias mediante la técnica del pulso – eco el factor más importante que afecta la exactitud del sistema está relacionado con la variación de la velocidad de la onda ultrasónica debido a la temperatura y a la composición del medio de transmisión en efecto, la velocidad del sonido en el medio , varia como una función de la temperatura, donde es la velocidad absoluta en el medio a 0°C, y T es la temperatura del medio en grados centígrados. = 1 + x ……………… Ec. 2.2 Un factor de error muy común es el conocido como falsos ecos como muestra la figura 2.10. Estos falsos ecos se pueden producir por razones diferentes: Puede darse el caso en que la onda emitida por el transductor se refleje varias veces en diversas superficies antes de que vuelva a incidir en el transductor (si es que incide). Este fenómeno, conocido como reflexiones múltiples, implica que la lectura del sensor, muestra la presencia de un obstáculo a una distancia proporcional al tiempo transcurrido en el viaje de la onda; es decir, una distancia mucho mayor que a la que está en realidad el obstáculo más cercano, que pudo producir la primera reflexión de la onda. Otra fuente más común de falsos ecos, conocida como crosstalk, se produce cuando se emplea un cinturón de ultrasonidos donde una serie de sensores están trabajando al mismo tiempo. En este caso puede ocurrir (y ocurre con una frecuencia relativamente alta) que un sensor emita un pulso y sea recibido por otro sensor que estuviese esperando el eco del pulso que él había enviado con anterioridad (o viceversa). Figura 2.10 Falsos ecos. x Las ondas de ultrasonido obedecen a las leyes de reflexión de las ondas como indica la figura 2.11, por lo que una onda de ultrasonido tiene el mismo ángulo de incidencia y reflexión respecto a la normal a la superficie. Esto implica que si la orientación relativa de la superficie reflectora con 12 respecto al eje del sensor de ultrasonido es mayor que un cierto umbral, el sensor nunca recibe el pulso de sonido que emitió. Figura 2.11 Reflexión de las ondas. 2.4 SENSOR ULTRASÓNICO HC-SR04 En el capítulo I se mencionaron algunas ventajas del sensor HC- SR04 por esa razón es que se eligió para la construcción del medidor de distancias y sus características se mencionan a continuación; en la figura 2.12 podemos observar la dimensión y precisión de dicho dispositivo [5]: x x Los módulos incluyen transmisores ultrasónicos, el receptor y el circuito de control. Número de pines: - x x x x x x x x VCC: Alimentación 5 V (4.5 V min – 5.5 V máx. TRIG: Trigger entrada (input) del sensor (TTL*). ECHO: Echo salida (output) del Sensor (TTL*). GND (tierra). Corriente de reposo: < 2 mA. Corriente de trabajo: 15 mA. Ángulo de medición: 30º. Ángulo de medición efectivo: < 15º. Detección de 2 cm a 400 cm (Sirve a más de 4 m, pero el fabricante no garantiza una buena medición). “Resolución” La precisión puede variar entre los 3 mm o 0.3 cm. Dimensiones: 45 mm x 20 mm x 15 mm. Frecuencia de trabajo: 40 KHz. *TTL: Lógica transistor- transistor Figura 2.12 Dimensión y precisión del sensor. 13 2.5 DISEÑO DEL MEDIDOR DE DISTANCIA En la figura 2.13 se muestra el diagrama a bloques del diseño del medidor de distancia, para su construcción se utiliza los siguientes componentes: x x x x x x Sensor ultrasónico HC- SR04. (APENDICE A) Microcontrolador Texas Instruments MSP430G2553. (APENDICE B) Display LCD de 16X2. (APENDICE C) Regulador de voltaje LM7805 y LM7833. (APENDICE D) C.I SN74HC164. (APENDICE E) Pila de 9V. El medidor de distancia se divide en diferentes etapas, consta de una etapa de sensado, en la cual se calcula la distancia a la que se encuentra un objeto; en la etapa de procesamiento se activa el sensor y este a su vez entrega la medición para posteriormente desplegar los resultados en una pantalla LCD, tal como se muestra en la figura 2.13. OBJETO Etapa de sensado ETAPA DE ALIMENTACION TRANSDUCTOR RECEPTOR Etapa de procesamiento MICROCONTROLADOR TRANSMISOR CALCULO DE LA DISTANCIA VISUALIZACIÓN Figura 2.13 Diagrama a bloques del medidor de distancia. 2.5.1 ETAPA DE SENSADO Para este diseño se eligió el sensor de distancia HC-SR04 (ver figura 2.14), por ser uno de los módulos ultrasónicos económicos en el mercado; sin reducir su estabilidad; altamente compatible con diferentes plataformas de microcontroladores que en nuestro caso es el MSP430G2553 de Texas Instruments. 14 Esta etapa se encarga de enviar una ráfaga de pulsos que al chocar con un objeto regresa para posteriormente pasarlos a la etapa de procesamiento. Figura 2.14 Configuración del sensor HC-SR04 y su funcionamiento. 2.5.2 FUNCIONAMIENTO DEL SENSOR ULTRASÓNICO HC- SR04 1. Enviar un pulso de al menos de 10 µs por el Pin Trigger (Disparador) para iniciar la lectura. 2. El sensor envía 8 pulsos de 40 khz (Ultrasonido) y coloca su salida Echo a un nivel alto, debe detectar este evento e iniciar un conteo de tiempo. 3. La salida Echo se mantiene en alto hasta recibir el eco reflejado por el obstáculo a lo cual el sensor pone su pin Echo a bajo, es decir, terminar de contar el tiempo. 4. Se recomienda dar un tiempo de espera después de terminar la cuenta. aproximadamente 50 ms de 5. La distancia es proporcional a la duración del pulso y se calcula con las ecuaciones siguientes (Utilizando la velocidad del sonido = 340 m/s): Distancia en cm (centímetros) = Tiempo medido en µs x 0.0167……….Ec.2.3 Distancia en in (pulgadas) = Tiempo medido en s x 0.00675 [4] ……..….Ec.2.4 2.5.3 ETAPA DE PROCESAMIENTO Para esta etapa se eligió el microcontrolador Texas Instruments MSP430G2553 que está formado por un microprocesador, mapa de memoria, puertos de entrada y salida; es de bajo costo y de fácil implementación; este se encargará de activar al sensor con un pulso de 10 µs y a su vez procesa la señal proveniente del HC-SR04 para desplegar los resultados en la pantalla LCD. En la figura 2.15 se muestra como se 15 conecta el sensor y el microcontrolador para la transmisión y recepción de datos, se coloca un transistor BC548, para que reduzca el voltaje (de 5 V a 3.3 V aproximadamente) proveniente de la terminal ECHO del sensor para evitar que se dañe el microcontrolador. Figura 2.15 Implementación del microcontrolador MSP430G2553 con el sensor HC-SR04. 2.5.4 ETAPA DE ALIMENTACIÓN Para esta etapa es necesario emplear 2 reguladores de voltaje, el LM7805 que alimenta al sensor HC-SR04 y al LCD; el LF33 para el microcontrolador MSP430G2553 como se muestra en la figura 2.16. BATERIA DE 9V LM7805 (5V) LF33 (3.3V) LCD HC-SR04 MSP430G2553 Figura 2.16 Diagrama a bloques de la etapa de alimentación. 2.5.5 ETAPA DE VISUALIZACIÓN Se utiliza una pantalla LCD de 16 caracteres y dos líneas (ver figura 2.17), este dispositivo es elegido en el proyecto por su capacidad de mostrar caracteres 16 alfanuméricos y por la facilidad de utilizar un display tipo gráfico; permitiendo representar la información que sea generada por cualquier equipo electrónico. En la tabla 2.1 se muestra la descripción de las terminales de la pantalla LCD. Figura 2.17 Configuración de la pantalla LCD. En la tabla 2.1, se muestra a detalle el funcionamiento de cada uno de los pines de la pantalla LCD. Tabla 2.1 Descripción de las terminales pantalla LCD 16X2. SÍMBOLO FUNCIÓN GND Tierra VCC Alimentación + 5V VCD VEE Voltaje de ajuste de contraste RS Selección de dato/comando R/W Lectura/escritura EN Habilitador DB0-DB7 Líneas de datos LED + Alimentación Backlight +3.5V a +5V LED - GND del Backlight 17 2.6 CONTRUCCIÓN DEL MEDIDOR DE DISTANCIA En la figura 2.18 se muestra el diagrama eléctrico que conforma todas las etapas del medidor de distancia, la etapa de sensado, la etapa de visualización y la etapa de alimentación que es la encargada de dar energía suficiente al sistema para su correcto funcionamiento. Figura 2.18 Diagrama eléctrico del medidor de distancia. Con ayuda del software PCB Wizard se diseña el circuito impreso mostrado en la figura 2.19, para la transferencia en la placa fenolica se utiliza el método del planchado. Figura 2.19 Circuito impreso. 18 Posteriormente se perforan todos los lugares correspondientes en la placa para montar los componentes y proceder a soldarlos (ver figura 2.20) Figura 2.20 Circuito soldado con componentes. 19 Se utiliza una caja de madera con las medidas mostradas en la figura 2.21 y a su vez se muestra el prototipo terminado. Figura 2.21 Dimensiones de Prototipo. 20 En la figura 2.22 se muestra el diagrama de flujo para programar el microcontrolador en lenguaje ensamblador (Ver apéndice E). INICIO 1 CONFIGURAR EL TEMPORIZADOR PARA CONTAR INTERVALOS DE TIEMPO DE 58ms 2 CONFIGURAR TERMINAL P1.1 PARA RECIBIR FLANCO DE SUBIDA DE LA TERMINAL ECHO DEL MODULO HC- SR04 3 4 GENERAR EL PULSO DE DISPARO PARA EL MODULO HC-SR04 A TRAVÉS DE P1.0 CONTADOR DE DISTANCIA= 0 TEMPORIZADOR ON ESPERANDO ECO 5 RECONFIGURAR P1.1 COMO FLANCO DE BAJADA 6 ECO RX 7 LEER CONTADOR Y ENVIAR INFORMACIÓN AL LCD Figura 2.22 Diagrama de flujo del medidor de distancia 21 CAPITULO III. PRUEBAS Y RESULTADOS 3.1 PRUEBA DEL MÓDULO DE ULTRASONIDO HC- SR04 Esta prueba tiene la finalidad de verificar que el módulo de ultrasonido y el microcontrolador estén funcionando de manera óptima. Se realizó con ayuda del osciloscopio, colocando el canal A en la terminal del microcontrolador (P1.0) que envía los 10 µs a la terminal TRIGGER (disparo) del módulo ultrasónico; a su vez el canal B se coloca en la terminal ECO (pulso de salida) del módulo. La Figura 3.1 muestra el pulso de disparo, y el pulso de salida (ECO), el cual cambia conforme se acerque o aleje un objeto, es decir que el módulo esté funcionando correctamente. PULSO DE DISPARO PULSO DE SALIDA IMAGEN 2 Figura 3.1 Pulso de disparo y salida del medidor de distancia. 22 3.2 PRUEBAS DEL MEDIDOR DE DISTANCIA Se realizaron las pruebas de medición con objetos de distintos materiales que se mencionan a continuación: - Prueba 1: con caja de cartón. Se colocó la caja a 2 cm del sensor, este entregó una lectura de entre 2 y 3 cm. - Prueba 2: con un objeto de plástico de forma rectangular. Este objeto fue colocado a 16 cm del sensor y en la pantalla se observó una lectura de 16 a 17 cm. - Prueba 3: con un frasco de vidrio. El frasco se fijó a 25 cm del sensor variando la distancia entre 25 y 26 cm. - Prueba 4: con una lata de aluminio. Esta fue puesta a 48 cm, se observa una lectura de 48 a 49 cm. - Prueba 5: con un vaso de unicel de 1 litro de capacidad. El vaso se coloca a 55 cm de distancia, se visualizó una lectura de 55 a 56 cm. - Prueba 6: con un trozo de madera de forma rectangular. La madera fue colocada a 67 cm del sensor, entregó una lectura de 66 a 67 cm. - Prueba 7: con una placa de acrílico. La placa fue colocada a 75 cm, se observa que la distancia variaba de 74 a 75 cm. - Prueba 8: con una hoja de papel. Se coloca a 93 cm, se observa una lectura de 93 a 94 cm. - Prueba 9: con un plato de cerámica. El plato fue colocado a 150 cm, entregando una lectura de 151 a 153 cm. - Prueba 10: con una regla metálica. La regla fue colocada a 200 cm del sensor, se observó que entrego una lectura de 200 cm. Al realizar estas pruebas, se observa que el medidor de distancia tiene una incertidumbre de 400 cm ± 1 cm (99.75%). En la Tabla 3.1 se muestran los resultados obtenidos al medir a distintas distancias comparándolas con un flexómetro. 23 Tabla 3.1 Cuadro de Resumen de Pruebas. PROTOTIPO DEL MEDIDOR DE DISTANCIA (CM) FLEXÓMETRO (CM) 2 17 30 48 55 65 80 100 150 MÍNIMIO MÁXIMO 2 16 30 48 55 65 80 100 151 3 17 31 49 56 66 81 101 153 Las pruebas anteriores se realizaron periódicamente (durante 15 días), obteniendo los mismos resultados en la tabla. En las figuras siguientes se observar las pruebas realizadas con el dispositivo. Figura 3.2 Pruebas de medición A 24 Figura 3.3 Pruebas de medición B Figura 3.4 Pruebas de medición C 25 3.3. COSTOS DE CONSTRUCCIÓN En la tabla 3.2 se presentan los costos de construcción del dispositivo. Tabla 3.2 Costo de Componentes del Dispositivo INSUMO Sensor ultrasónico HC –SR04 CANTIDAD 1 COSTO UNITARIO $120.00 COSTO TOTAL $120.00 Microcontrolador MSP430G2553 1 $60.00 $60.00 C.I. SN74LS164N 1 $7.00 $7.00 Pantalla LCD 16X2 1 $60.00 $60.00 Transistor BC548 1 $1.00 $1.00 Resistencia de 1 KΩ 2 ¢0.50 $1.00 Resistencia de 10 KΩ 1 ¢0.50 ¢0.50 Regulador de voltaje LM7805CV 1 $15.00 $15.00 Regulador de voltaje LMG33CV 1 $15.00 $15.00 Placa fenolica 1 $10.00 $10.00 Pila de 9V 1 $50.00 $50.00 Interruptor 1 $5.50 $5.50 Conector para pila de 9V 1 $3.00 $3.00 Caja de madera 1 $30.00 $30.00 26 CONCLUSIONES. El proyecto se enfoca en la obtención de mediciones de distancia a través de una pantalla LCD de 16X2, implementada al microcontrolador y al sensor ultrasónico HCSR04. Los sensores ultrasónicos generan un lóbulo de radiación en su frente que en teoría recoge cualquier variación de cuerpos extraños. Sin embargo por efectos de difracción los cuerpos que no cumplen con cierta altura no son detectados y algunos materiales como las telas, son traspasadas. El prototipo se diseña de forma tal que los componentes no requieren un consumo mayor al que pueda proveer una fuente de alimentación, por ser portátil esta última es una batería alcalina de 9 V, capaz de entregar 565 mAh, siendo reajustada en voltaje para alimentar la pantalla LCD (5 V), el microcontrolador (3.3 V) y el sensor ultrasónico (5 V). El consumo máximo en corriente es de 200 mA, debido a esto la vida útil que ofrece la batería es de 350 mediciones antes de ser reemplazada. De acuerdo con los resultados obtenidos en el capítulo 3 se cumple con los requisitos de medición, ya que tiene un margen de error de ±0.75% Por lo tanto el proyecto cubre los objetivos de este trabajo cumpliendo con cada punto específico, entregando un dispositivo confiable. Como trabajo futuro se tiene la posibilidad de: mayor alcance y mediciones a distintas temperaturas. 27 BIBLIOGRAFÍA [1] Benson Carlin, Ultrasónica, Editorial Urmo, España 1982, p.p. 37- 39 [2] Manuel Recuero López, Ingeniería acústica, Editorial Thomson-Paraninfo, España 1999, p.p. 440 – 442, 455- 459 [3] http://www.profesorenlinea.cl/fisica/ultrasonidoAPLICAC.htm Consultado el 17 de Octubre de 2013 [4] http://bkargado.blogspot.mx/2013/09/todosobrehc-sr04.html Consultado 28 de Diciembre de 2013 [5] http://www.techmake.com/hc-sr04.html Consultado el 30 de Enero de 2014 [6] http://sistendca.com/DOCUMENTOS/Curso%20Ultrasonido%20Basico.pdf Consultado el 5 Junio de 2014 [7] https://electronicavm.files.wordpress.com/2011/09/tema-4-sensores.ppt Consultado el 31 Enero de 2015 28 APENDICE A. DATASHEET HC- SR04 29 30 APENDICE B. DATASHEET MSP430G2553 31 32 33 34 35 36 APENDICE C. DATASHEET DISPLAY LCD DE 16X2 37 38 39 40 41 42 43 44 APENDICE D. DATASHEET LM7805 Y LF33 45 APENDICE E. DATASHEET SN74HC164 46 47 48 APENDICE E. CÓDIGO DEL PROGRAMA DEL MEDIDOR DE DISTANCIA NAME main PUBLIC main ; Nombre del Modulo ; make the main label vissible ; outside this module #include "msp430g2553.h" ; #define controlled include file #include "Lib LCD.s43" #define FLANCO_BAJADA (0x205) #define SR04_LISTO (0x206) ;------------------------------------------------------------------------------ORG 0xC000 ;Inicio del programa ;------------------------------------------------------------------------------main RESET MOV.W #0x400,SP ; Inicialización del stackpointer MOV.W #WDTPW+WDTHOLD,&WDTCTL ; Watchdog timer detenido MOV.B &CALBC1_1MHZ,&BCSCTL1 ; DCO funcionando a la frecuencia MOV.B &CALDCO_1MHZ,&DCOCTL ; calibrada de 1MHz CLR.B &P1SEL MOV.B #0xFD,&P1DIR CLR.B &P1OUT 2 BIC.B #BIT1,&P1IES BIS.B #BIT1,&P1IE CLR.B &P1IFG 1 MOV.W #TASSEL_2+MC_1+TAIE,&TACTL MOV.W #57,&TACCR0 MOV.B #0,FLANCO_BAJADA MOV.B #0,SR04_LISTO CALL #INI_LCD MOV.W #LET1,R13 CALL #IMP_LET EINT SEND_US BIS.B #BIT0,&P1OUT MOV.W #1,R14 3 CALL #TIEMPO BIC.B #BIT0,&P1OUT ESP_ECO CMP.B #1,SR04_LISTO JNE ESP_ECO ;Pulso de activación del modulo de SR04 49 MOV.B #0xC6,R15 CALL #CMD_LCD 7 MOV.B CENTENA,R15 CALL #DATO_LCD MOV.B DECENA,R15 CALL #DATO_LCD MOV.B UNIDAD,R15 CALL #DATO_LCD JMP SEND_US ;DATO LISTO, ENVIAR AL LCD ;RUTINA DE TIEMPO MOV.W #65535,R14 CALL #TIEMPO MOV.W #65535,R14 CALL #TIEMPO MOV.B #0,SR04_LISTO 4 JMP SEND_US ;------------------------------------------------------------------------------; Rutinas de Servicio de Interrupción ;------------------------------------------------------------------------------ECO BIT.B #BIT1,P1IFG JZ NO_ECO CMP.B #0,FLANCO_BAJADA JNE RX_ECO CLR.B R4 5 CLR.W &TAR BIS.B #BIT1,&P1IES MOV.B #1,FLANCO_BAJADA CLR.B &P1IFG RETI 6 RX_ECO MOV.B MOV.B CALL BIC.B #BIT1,&P1IES #0,FLANCO_BAJADA #1,SR04_LISTO #BIN_A_BCD NO_ECO CLR.B &P1IFG RETI TA_HND ADD &TAIV,PC RETI JMP CCIFG_1_HND JMP CCIFG_2_HND RETI RETI TAIFG_HND: INC.B R4 50 RETI CCIFG_2_HND RETI CCIFG_1_HND RETI LET1 DC8 ' DISTANCIA',0 ;--------------------------------------------------------------------------; Vectores de Interrupción ;------------------------------------------------------------------------------ORG 0xFFFE ;Vector de RESET del MSP430 DW RESET ORG DW 0xFFF0 TA_HND ORG DW 0xFFE4 ECO END END main 51 APENDICE F. HOJAS DE DATOS DEL TRANSISTOR BC548 52 53 54