superresolucion: reconstruccion de datos en 1d resumen
Anuncio

ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
SUPERRESOLUCION: RECONSTRUCCION DE DATOS EN 1D
1
Prof. Sebastián Hernández1 y Dr. Claudio Delrieux2
{Alumno de la Maestría en Informática y Sistemas, UNPA}
sebastian.unpa@gmail.com
2
{Docente Investigador, UNS}
cad@uns.edu.ar
UNPA – UARG
Universidad Nacional de la Patagonia Austral – Unidad Académica Río Gallegos
Departamento de Ciencias Exactas y Naturales
Grupo de Investigación: Computación Gráfica
Río Gallegos, Julio 2013
RESUMEN
Hoy el procesamiento de imágenes se volvió cotidiano debido a la masificación de equipos
que generan, almacenan y muestran imágenes digitales. Esto ocurre porque son necesarias (o
deseables) imágenes con mayor resolución y tamaño a medida que se encuentran nuevas
aplicaciones que dependen de ellas y el recambio de equipos no siempre es una opción viable.
La reconstrucción de imágenes (ya sea ampliación, aumento de resolución o definición de
detalles) se hace a través de algoritmos matemáticos. En este informe se propone un algoritmo
capaz de identificar regiones y extraer información de ellas en vectores de datos de 1D. Esto
es un paso fundamental para poder crear un algoritmo capaz de segmentar e identificar bordes
correctamente.
Palabras Clave: super resolución; detección de bordes; procesamiento de imágenes.
109
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
INTRODUCCIÓN
Existen dos tipos principales de imagen: vectorial y plana. Las vectoriales son en realidad un
conjunto de instrucciones geométricas que un software interpreta y como resultado genera una
imagen. En cambio las imágenes planas, generalmente obtenidas con algún dispositivo
capturador como una cámara digital o un teléfono celular, poseen información sobre cada uno
de los píxeles que las componen. Esto ocurre cuando un dispositivo intenta capturar el
espectro de luz visible emitido desde un objeto que incide sobre un sensor digital que procesa
y almacena esta información. Uno de los formatos más comunes de representación de una
imagen es el espacio cromático RGB, donde cada pixel tiene asociados 3 valores, rojo (Red),
verde (Green) y azul (Blue)con valores enteros que van desde 0 hasta 255. La composición de
estos tres valores genera, de acuerdo a la sensibilidad del ojo humano, los colores
visualizados.
Una característica importante de las imágenes planas es su resolución. Cuantos más píxeles
pueda capturar un sensor con respecto a una superficie determinada, mejor resolución tendrá,
debido a que es mayor la cantidad de información obtenida y almacenada con respecto a un
objeto real. Sin embargo, cuando la superficie cubierta por el objetivo de la cámara es mucha,
cada píxel se corresponde con una gran cantidad de área real. Por ejemplo, no es lo mismo
una foto de un rostro que una imagen satelital. Cada píxel de la segunda imagen contiene
información de una gran superficie, pudiendo medirse en metros cuadrados o incluso en
kilómetros cuadrados. En cambio, cada píxel de la primera representa una pequeña porción,
equiparabletal vez a una superficie medida en milímetros cuadrados.
Cuando ocurre que un píxel representa mucha información, es posible que el color
almacenado en ese píxel sea combinación de varios colores reales. Esto se aprecia cuando se
fotografía desde una distancia considerable, un objeto pequeño o una frontera entre objetos
diferentes. Si fotografiamos desde un satélite una cancha de fútbol, posiblemente el píxel que
tiene la información del césped y la pelota sea verde, aunque ligeramente diferente de los
píxeles que contienen solo césped.
En este informe se muestra la generación y aplicación de un algoritmo capaz de identificar
cambios de tipos de superficie en una dimensión y determinar con precisión la proporción
correcta de superficies diferentes presentes en la frontera.La organización del trabajo es la
siguiente: (1) Introducción, (2) Marco histórico, (3) Marco conceptual, (4) Marco teórico,
(5) Materiales y Método, (6) Resultados, (7) Discusión, (8) Conclusiones,
(9) Recomendaciones y (10) Agradecimientos.
MARCOS DE REFERENCIA
1.1. Marco histórico
Super resolución es un término que identifica a un conjunto de métodos para mejorar la
resolución, de imágenes y videos. Algunos métodos de super resolución se basan en el uso de
110
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
dos o más tomas del mismo objeto para mejorar la información de que se dispone en cada
pixel. Otros métodos proponen el uso de funciones no lineales de reconstrucción, basadas en
sistemas polinomiales, tales como Lagrange o Hermite (Alegre et al., 2003), o funciones no
derivables, tal como la reconstrucción fractal (Manual Perfect Photo Suite 7, 2013).
Finalmente, cuando no se poseen más tomas o no se puede asumir un método paramétrico o
procedimental de reconstrucción, el aumento de resolución se realiza a través de las técnicas
más simples, conocidas como upscaling o upsampling.El cambio en la resolución tiene como
objetivo lograr una mejor definición de los detalles de la imagen aunque no necesariamente
implica un cambio en su tamaño.
La mayoría de las técnicas de super resolución con cuadros múltiplesse basan en una idea
simple: utilizar información de diferentes imágenes con el fin de crear una nueva que
aproveche las mejores características de las imágenes utilizadas como base. El primer trabajo
de este tipo fue publicado en la década del 80, (Tsai y Huang, 1984) aunque el término super
resolución aparece finalmente en los años 90, (Irani y Peleg, 1990). Hoy está extendido y es
la base de las mejoras en dispostivos de captura digital como cámaras fotográficas y
filmadoras.
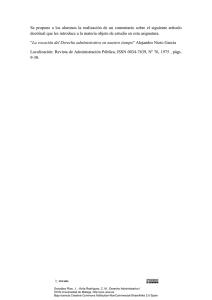
En la Figura 1 se observa un ejemplo de super resolución logrado combinando 9 imágenes. La
imagen resultantefue extraída de (Wikimedia Commons, 2007), donde se observa una mejora
importante en los detalles, las claridad de los colores y la reducción del ruido digital.
Figura 1: Superresolución obtenida combinando 9 imágenes.
Otro problema de índole similar al ya comentado es el de detección de bordes, el cual es un
caso particular del problema general de la segmentación, o sea, la separación de figura y
fondo, que consiste en identificarla frontera de un objeto del mundo real representado en una
imagen. Dentro del lenguaje específico hay dos términos principales, llamando foreground al
objeto y background al resto de la imagen, distinta del objeto. Lainterfase entre foreground y
background se denomina borde. En la Figura 2 el texto ICT tiene color negro y el fondo es de
color gris (0 y 203 en escala de grises respectivamente) y su tamaño real es de 300×250px.
111
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
Figura 2: Texto ICT sobre fondo gris. Tamaño original.
Para simular la digitalización el texto, es decir la transformación en imagen plana, se le aplica
una reducción al 25% observable en la Figura 3, lo que es habitual cuando un sensor captura
una imagen de un objeto real. Es muy difícil que el área abarcada por un píxel en el sensor
corresponda con una superficie equivalente en el objeto real. ¡Sería necesario para esto tener
sensores del mismo tamaño que los objetos!
Figura 3: Texto ICT sobre fondo gris. Reducción al 25%.
La figura 4 se obtiene al ampliar la Figura 3 en un intento de rescatar el tamaño original de la
imagen, pero se observa pixelado que distorsiona la imagen, impidiendo detectar claramente
la interfase entre background y foreground. Esto muestra que el borde no es tan simple de
detectar en una imagen digital como en el objeto real (Marr y Hildreth, 1980).
Figura 4: Texto ICT sobre fondo gris. Tamaño original obtenido por ampliación.
El efecto comentado ocurre muy seguido cuando se captura una imagen y el sensor está
ubicado muy lejos del objeto real, tal como ocurre en las imágenes satelitales. Una imagen
satelital es la representación gráfica de una porción de terreno, capturada por el sensor digital
de un satélite artificial. Este tipo de digitalización permite observar características especiales
de la zona visualizada tales como vegetación, cursos de agua, tipos de suelo, etc. La
aplicación de las imágenes satelitales es variada, desde uso civil (estudio de clima, océanos,
vientos y suelo) hasta militar (espionaje y reconocimiento de terreno).
112
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
Además de los ya mencionados existen otros factores que impiden que la imagen digitalizada
sea tan clara como el objeto del mundo real:
• Digitalización: Es casi seguro que el contorno del objeto real no coincida con la
distribución de píxeles en el sensor. Es decir que un píxel que capture informacióndel
“borde” contiene información de foreground y background, en porcentajes variables.
Un caso real es el satélite LandSat 7, que tiene una banda espectral (Banca
Pancromática) con resolución espacial de 15m. Es decir que un píxel de la imagen
digitalizada representa un cuadrado de 15m de lado. Es imposible que un teselado en
cuadrados de lado 15m coinciada con las divisiones exactas de objetosdel mundo real
(parcelas).
• Ruido digital: Interactúan también otros factores de índole física, como el tipo de
cámara, material y sensibilidad del sensor, temperatura, polvo, movimiento, etc. Es
muy difícil que dos píxeles que correspondan al mismo nivel de grises tengan el
mismo nivel en la imagen digitalizada.
1.2. Marco conceptual
En el caso de objetos del mundo real cuyos colores sean similares, una de las técnicas para
identificarlos consiste en utilizar un sensor infrarrojo en vez de uno RGB. Lo que se digitaliza
es la radiancia espectral de los objetos y con ello la identificación es más sencilla. Es sabido
que los cuerpos calientes emiten radiación térmica en todo el espectro electromagnético, sobre
todo en la zona del infrarrojo. Si se mide la radiancia de un cuerpo para todo el espectro de
frecuencias, se obtiene la radiancia espectral del cuerpo.
Al analizar las curvas obtenidas con el cuerpo a distintas temperaturas, es evidente que esta
curva depende fuertemente de la temperatura, y del material debido a que cada material tiene
su propia curva de emisividad espectral. Además, a medida que aumenta la temperatura, la
frecuencia a la que ocurre la máxima radiancia va aumentando, y pasa del infrarrojo al rojo
opaco, luego al rojo brillante y al blanco.
Teniendo en cuenta este fenómeno físico,podemos medir diferentes objetos de acuerdo a su
radiancia espectral además de hacerlo teniendo en cuenta sus colores visibles. Todo depende
de la paleta de colores utilizada en la imagen capturada. Una explicación más detallada se
encuentra en el sitio del telescopio espacial Spitzer (Jet Propulsion Laboratory, 2000).
1.3. Marco teórico
La detección de bordes es una sección fundamental dentro del análisis de imágenes y la
computación gráfica(Bindu Basal, 2012) (Shrivakshan y Chandrasekar, 2012). El poder
detectar correctamente la frontera entre foreground y background permite cuantificar
superficies en imágenes satelitales (Pena et al, 2012), identificar tejidos extraños (y conocer
su tamaño) en imágenes médicas, por dar un par de ejemplos.
Existen diversos algoritmos para realizar el trabajo de identificar los puntos en los que el
brillo de la imagen cambia bruscamente. La mayoría emplea operadores locales basados en la
aproximación discreta de la derivada primera y segunda de los niveles de gris de la imagen.
113
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
Para un conjunto continuo de datos, es posible aproximar la derivada primera teniendo en
cuenta la definición del cociente incremental, por lo que:
f '( x) =
f ( x) − f ( x + h)
,
h
lo que se denomina primera aproximación por diferencias no centrales y depende del
incremento h. En el caso de datos discretos, x y h no son otra cosa que las posiciones de los
píxeles en los que se desea aproximar la derivada.
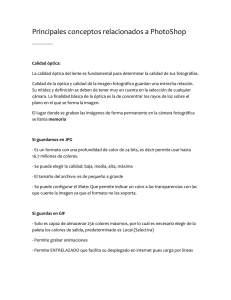
En el siguiente ejemplo se muestra la realización de detección de bordes en una fila de píxeles
de la imagen constituida por tres rectángulos cuya intensidad de gris es 25, 230 y 140. Al
aplicar la aproximación discreta de la derivada primera, Figura 5, se detecta un borde en el
píxel 50 y otro en el píxel 100. El tamaño del salto en la función corresponde al cambio en la
intensidad de grises y la orientación indica el pasaje de una gama de 25 a 230 (aumento de
luminosidad, pico orientado hacia abajo) o cambio de gama de 230 a 140 (disminución de
luminosidad).
0
-100
-200
40
80
120
Figura 5: Aproximación discreta de f’(x) con gamas de gris.
Este método es simple de implementar y extrapolar para el análisis de imágenes en 2D, sin
embargo es sensible al ruido presente en la imagen.
Otra forma de detectar bordes es por medio de la similitud con una muestra estándar o
clusterización. En este caso, con los métodos de minería de datos, o también data mining, se
trata de segmentar (clusterizar) una imagen a través de información extraída de un conjunto
de ejemplos existentes (Hernández Orallo et al., 2007). Por medio de esos ejemplos
conocidos, se intentará predecir las características de un nuevo dato no perteneciente al
conjunto de ejemplos. Es decir que el objetivo es determinar cuán similar es un píxel ubicado
en cercanías al borde, con respecto a una región u otra.
Para ello, es necesario tener en cuenta que por “similar” se considera la distancia matemática
de las características de un píxel con respecto a otro. Las medidas de distancia más
tradicionales son aquellas que se aplican sobre dos instancias o ejemplos, tales que todos los
atributos son numéricos. Las siguiente son algunas de las métricas más utilizadas:
114
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
•
Distancia Euclídea:
d ( x, y ) =
•
n
∑(x − y )
i =1
i
2
i
Distancia de Manhattan:
n
d ( x, y ) = ∑ xi − yi
i =1
•
Distancia de Chebychev:
d ( x, y ) = max xi − yi
i =1,2,..., n
También es posible encontrar métodos híbridos que, combinando varias técnicas en
simultáneo, consiguen resultados de calidad superior a los identificados a través de métodos
simples (Vasavada y Tiwari, 2013). Estos métodos se definen para imágenes en gamas de gris
y luego se extrapolan hacia la representación en formato RGB.
Algoritmos de ampliación de imágenes
Los algoritmos de interpolación (ampliación) de imágenes se basan en el proceso de calcular
valores numéricos desconocidos (píxeles) a partir de otros conocidos mediante la aplicación
de algoritmos finitos. La idea central es producir una imagen de tamaño superior a la original,
completando la información faltante con datos interpolados a partir de un algoritmo específico
(González y Woods, 2008).
Los siguientes son algunos de los métodos más conocidos y simples de aplicar:
•
Vecino más cercano: Es el más básico, con resultados de baja calidad si la imagen
tiene una gran varación en las gamas de gris. Lo que hace es considerar el píxel más
cercano al píxel a interpolar, de forma sencilla puede decirse que sólo se agranda el
píxel. A favor puede decirse que requiere un tiempo de procesamiento muy pequeño,
en comparación con otros métodos.
•
Interpolación Lineal: Considera los 4 píxeles más cercanos al que se desea interpolar.
La forma de interpolar es calculando el promedio de los valores de gris de los 4 puntos
usados como referencia. Debe tenerse en cuenta que la imagen resultante es más suave
que la generada por el método del vecino más cercano. Puede causar que la imagen
resultante se vea difusa, con poco detalle fino.
•
Interpolación Bicúbica: Actualmente es uno de los algoritmos de interpolación más
utilizado, lo que hace es considerar los 16 píxeles más cercano al que se desea
interpolar. O sea, se aproxima localmente el nivel de gris en la imagen original
mediante la generación de una superficie polinómica bicúbica. Es el algoritmo óptimo
entre tiempo de procesamiento y calidad de la imagen de salida.
115
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
Método propuesto
El método que se propone en este informe se basa en una segmentación por patrones de un
vector de datos en 1D para luego interpolar los datos sobre los bordes encontrados. Es decir
que, primero se detectará qué píxel es parte del borde de la imagen, y después se calculará la
composición de ese píxel que contiene información de los dos patrones que generan la
frontera. De esta forma se generará un nuevo vector, con información relativa a los patrones
encontrados y con una frontera bien definida entre los patrones. La aplicación de este método
no puede realizarse en imágenes puesto que sólo se define para detección de vectores
unidimensionales.
RESULTADOS, ANÁLISIS Y CONCLUSIÓN
2.1. Materiales y método
Como aplicación concreta de lo antes desarrollado, se intentará segmentar correctamente un
vector extraído de una imagen digital que contenga datos de dos fuentes diferentes pero del
mismo objeto real. Un ejemplo claro de esto es dos imágenes digitales, del mismo objeto real,
pero capturadas con diferentes sensores, uno RGB y otro infrarrojo.
Para determinar qué proporción tienen de cada clase los píxeles del borde es necesario lograr
la identificación automática. Para ello se ejecuta el código en EulerMath:
function bases(x:real)
n=length(x);
p=4; ## longitud de la base a analizar, contiene dos tipos de información
baseA=[134,80,113,76];## datos conocidos de antemano, identifican a un material em
concreto
baseB=[72,226,69,180];
baseC=[155,141,178,234];
pA=zeros(1,n/p);
pB=pA;
pC=pA;
for i=1 to n/p;## compara similitudes de cada componente con alguna de las bases conocidas
pA[i]=1-round(sum(abs(x[p*i-3:p*i]-baseA))/1020,2);
pB[i]=1-round(sum(abs(x[p*i-3:p*i]-baseB))/1020,2);
pC[i]=1-round(sum(abs(x[p*i-3:p*i]-baseC))/1020,2);
end
x2=pA_pB_pC;
return x2
endfunction
A modo de ejemplo, segenera un vector de pruebaV con datos que pueden ser de la clase A, B
o C, con las siguientes características de información:
• A=[134,80,113,76]
• B=[72,226,69,180]
116
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
•
C=[155,141,178,234]
Los datos de V son generados de la siguiente forma:
• V=[A1 | A2 | 0.359*A3+0.641*B1 | B2 | B3 | 0.234*B2+0.766*C2 | C1 | C3| A2]
para simular la respuesta que tendrá un sensor digital (o dos como en este caso) a la radiación
electromagnética recibida.
Los datos simulados del ejemplo anterior:
• A1=[ 132 80 112 76 ]
• A2=[ 133 80 113 76 ]
• A3=[ 132 80 111 76 ]
• B1=[ 72 224 69 180 ]
• B2=[ 70 226 69 180 ]
• B3=[ 72 227 69 180 ]
• C1=[ 155 139 178 234 ]
• C2=[ 154 142 178 234 ]
• C3=[ 56 141 176 234 ]
• C4=[ 156 141 176 234 ]
Es decir que los datos son muy similares a los datos utilizados como base para clusterizar. Las
diferencias en la información radican en los problemas ya comentados de las imágenes como
ruido, movimientos en el sensor, tipo de sensor, etc. Es de notar que la tercera y sexta
componente de V contienen información mezclada de dos tipos, aunque no se sabe las
proporciones de la mezcla de información. Esto indica que el borde (o la frontera entre las dos
regiones adyacentes) se encuentra en esos píxeles.
Aplicando el código de detección e identificación se obtiene como resultado:
V=[A | A | 0 | B | B | 0 | C | C | A],
donde 0 indica la presencia de un píxel frontera. El resto de la información es clusterizada de
acuerdo a las bases conocidas.
En los píxeles con valor 0 se identifica una mezcla de información de las bases adyacentes.
Para analizar en detalle esos píxeles (y detectar las proporciones que tiene de cada base) se
aplica el código:
function resolver(vec, baseA, baseB, baseC, x)
n1=length(vec); ## vec es string y tiene las bases identificadas y valores 0 del borde
n2=length(x); ## x es el vector de la imagen a filtrar
n=n2/n1; ## longitud de las bases
for i=1 to n1
if vec[i]=="0"##se analiza sólo aquellos elementos que tienen información mezclada
if vec[i-1]=="A" then base1=baseA; endif
if vec[i-1]=="B" then base1=baseB; endif
if vec[i-1]=="C" then base1=baseC; endif
if vec[i+1]=="A" then base2=baseA; endif
117
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
if vec[i+1]=="B" then base2=baseB; endif
if vec[i+1]=="C" then base2=baseC; endif## se identifican las bases
adyacentes, a fin de poder resolver un sistema de ecuaciones lineales sobredimensionado
round(svdsolve((base1_base2)',x[(i-1)*n+1:i*n]'),3)
endif
end
endfunction
El código antes mostradoresuelve un sistema de ecuaciones lineales sobredimensionado por
medio de la descomposición en valores singulares, (Burden y Faires, 2002),y da como
resultado la proporción de cada una de las bases utilizadas. En el ejemplo ya presentado, para
el primer elemento 0, el planteo es el siguiente
α . A + β .B = V [3] ,
y el cálculo de la composición de los dos píxeles del borde da como resultado α=0.352 y
β=0.641 para el primer borde y para el segundo α=0.235 y β=0.759, lo que es cierto dentro de
un pequeño margen de error, recordando la forma en que fueron generados.
2.2. Resultados
La segmentación del vector de prueba se realizó por comparación con un patrón definido,
utilizando distancias entre las gamas de gris de los píxeles. El resultado final, es decir, la
detección de la composición de cada píxel frontera se obtuvo a través de la resolución de un
SEL sobredimensionado por medio del método de descomposición en valores singulares.A
partir de esto, también será posible redimensionar un vector de 1D en otro sin perder
información de la frontera. Retomando el ejemplo numérico, si se intentara aumentar el
tamaño al triple del vector V, quedaría el triple de elementos (píxeles). Se centrará la atención
en las componentes, ya clusterizadas,2 a 4 debido a que la componente 3 contiene la frontera:
V = [… | A | 0 | B | …]
V* = [… | A | A | A| 0 | 0 | 0 | B | B | B | …]
O sea que la frontera, es decir los píxeles que la contienen, también se han triplicado. Sin
embargo, al conocer la proporción de las clases será posible reescribirlo de la siguiente
manera:
V* = [… | A | A | A| A | k1.A+k2.B| B | B | B | B | …],
El primer píxel frontera se identifica íntegramente como clase A, ya que su componente
original, y por ende de toda la frontera, era 35,2% A y 64,1% B. El tercer píxel, del mismo
modo que el anterior, se transforma en clase B. En cambio el píxel frontera intermedio, debe
tener componentes tanto de clase A como de clase B, entonces por medio de proporciones se
calcula que k1 = 0.019 y k2 = 0.308. Es decir que la frontera nuevamente queda contenida en
un solo píxel y no se desparrama esta información hacia los píxeles adyacentes.
118
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
2.3. Discusión
Las siguientes son preguntas aún abiertas, que espero poder responder durante el desarrollo de
la tesis.
• ¿El resultado será el mismo si se aplica en imágenes 2D tomando el vector de prueba
como filas o columnas de la imagen original?
• ¿Es un algoritmo sensible al ruido cuando éste afecta al borde?
• ¿Qué tan fiable será el modelo en caso de muestras (clases) muy parecidas en ambos
tipos de dato (RGB e infrarrojo)?
• ¿Podrá utilizarse algún otro método numérico para predecir las regiones en el caso de
que las bases sean similares en intensidad de gris?
Por el momento no es posible comparar los resultados obtenidos con imágenes en 2D puesto
que el método propuesto se desarrolla en 1D. Se tendrá en cuenta, una vez ampliado el
algoritmo para datos en 2D, la comparación con los métodos propuestos, aunque no se
encuentra en la bibliografía la superresolución a partir de dos tipos diferentes de imagen. Éste
es uno de los motivos por el cual el avance es lento.
CONCLUSIONES
El algoritmo presentado para identificación de bordes en vectores de 1D se ejecuta con bajo
tiempo de cómputo y obtiene resultados de calidad para un vector generado en forma manual.
Es necesario conocer la información básica que corresponden a las regiones, a fin de poder
detectar el borde. En el caso de no conocer la información de las regiones, es posible
calcularla por medio del algoritmo de K-Medias.La etapa experimental del trabajo a futuro
incluye la ampliación de este algoritmo para matrices de datos (imágenes en gamas de gris).
RECOMENDACIONES
Con el fin de aprovechar los diferentes tipos de información, debe considerarse que la
información de cada clase corresponde a datos de gama de gris (o RGB) y la medición
correspondiente en infrarrojo. Esto se hará con el fin de evitar que colores parecidos
devuelvan clases parecidas, la componente infrarroja generará una diferencia sustancial.
AGRADECIMIENTOS
A Claudio Delrieux por el apoyo, paciencia y tiempo dedicado. A María Laura Ivanissevich,
por la búsqueda de información y revisiones periódicas.
119
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.
ICT-UNPA-75-2013
ISSN: 1852-4516
Aprobado por Resolución N° 1091/13-R-UNPA
REFERENCIAS
Alegre E., Sánchez L., Fernández R. Á., Mostaza J. C., 2003. Procesamiento Digital de
Imagen: fundamentos y prácticas con Matlab. Universidad de León.
Bindu Bansal, et al. (2012) Comparison of Various Edge Detection Techniques. Journal of
Information and Operations Management ISSN: 0976–7754 & E-ISSN: 0976–7762, Volume
3, Issue 1, pp– 103-106.
Burden R. y D. Faires, 2002, Análisis Numérico. Ed. Thompson, séptima edición.
González R. C. y Woods R. E., 2008, Digital Image Processing, 3rd edition. Pearson
Education.
Hernández Orallo J., Ramírez Quintana J. y Ferri Ramírez C., 2007, Introducción a la Minería
de Datos. Pearson Educación.
Irani M. y Peleg S., 1990, “Super Resolution From Image Sequences” ICPR, 2:115--120.
Jet Propulsion Laboratory, 2000, “Grupo de Educación y Difusión Pública en el Centro
Científico Spitzer”. http://legacy.spitzer.caltech.edu/espanol/edu/learn_ir/
Marr D. y Hildreth E., 1980, “Theory of Edge Detection”, Proceedings of the Royal Society
of London. Series B, Biological Sciences 207 (1167): 187—217.
Manual Perfect Photo Suite 7, 2013, p212, onOne Software, versión digital.
Pena N., Garza G., Cao Y. y Qiao Z., 2012, “Edge Detection of Real Synthetic Aperture
Radar Images through Filtered Back Projection”, in International Conference on Systems and
Informatics
Shrivakshan G.T. y Chandrasekar C., 2012, “A Comparison of various Edge Detection
Techniques used in Image Processing” in IJCSI International Journal of Computer Science
Issues, Vol. 9, Issue 5, No 1.
TsaiR. Y. y HuangT. S., 1984, “Multiframe image restoration and registration”, in Advances
in Computer Vision and Image Processing, vol. 1, chapter 7, pp. 317--339, JAI Press,
Greenwich, Conn, USA.
Vasavada J. y Tiwari S., 2013, “A Hybrid Method for Detection of Edges in Grayscale
Images” in I.J. Image, Graphics and Signal Processing, DOI: 10.5815/ijigsp.2013.09.04.
Wikimedia
Commons,
2007,
“File:Super-resolution
example
http://en.wikipedia.org/wiki/File:Super-resolution_example_closeup.png
closeup.png”.
120
Esta obra está bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivar 4.0 Internacional.