1. preliminares del curso diseño de elementos de máquinas
Anuncio

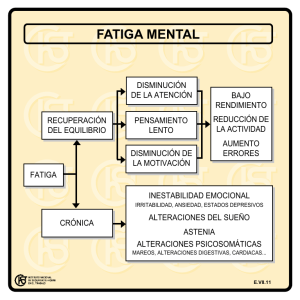
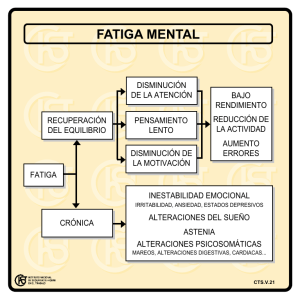
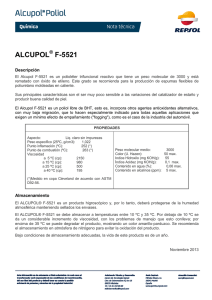
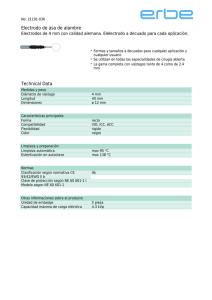
1. PRELIMINARES DEL CURSO DISEÑO DE ELEMENTOS DE MÁQUINAS Al diseñar los elementos de máquinas en general son varios los criterios que deben ser tenidos en cuenta para garantizar su funcionalidad, estabilidad de trabajo y fiabilidad bajo todas las condiciones de operación. Entre los criterios que el diseñador debe considerar al proyectar cualquier componente se cuentan la resistencia mecánica en el núcleo y en la superficie, la rigidez y la estabilidad de las formas y las superficies de los elementos bajo cargas estáticas, de impacto y variables. En este capítulo se recuerdan algunos conceptos de resistencia de materiales, los más utilizados en los cálculos de diseño de piezas a partir del criterio de la resistencia mecánica. El diseñador debe siempre preguntarse si es la resistencia el criterio fundamental de dimensionamiento o en qué casos debe utilizarse en una etapa de cálculo de comprobación. 1.1. CONSIDERACIONES DE RESISTENCIA EN LAS SOLICITACIONES ESTÁTICAS DE LAS PIEZAS. La mayoría de los diseños en los sistemas de potencia mecánicos vinculan las cargas que una pieza de un material dado debe soportar o transmitir, bajo unas condiciones de operación y seguridad estipuladas, con la forma y las dimensiones de dicha pieza. Se habla así de los diseños de proyecto, a partir de la resistencia mecánica. Los otros cálculos pueden resultar de análisis y comprobación. Algunos piezas por su aplicación pueden incluir modificaciones constructivas generadas por perforaciones o labraduras para posicionamiento de piezas, estrías internas o externas bajo diferentes ángulos, canales de lubricación, inclusión de elementos de diferente material (piezas compuestas), etc. En esos casos es importante realizar un análisis de los esfuerzos en los planos relativos o aledaños a esas zonas, con el fin de compararlos con los esfuerzos permisibles para la pieza. En piezas que estén sometidas a esfuerzos bidimensionales (reducción de los estados tensionales a dos esfuerzos principales 1 y 2), como en los recipientes a presión, piezas sometidas a esfuerzos de contacto, discos, volantes, etc. los esfuerzos normales y cortantes en un plano de interés (figura 1.1) estarán dados por: 1 cos 2 2 cos 2 2 ó 1 cos 2 2 sin 2 0 ,5· 1 sin 2 0 ,5 2 sin 2 2 ó 0 ,5 1 2 sin 2 (1.1) (1.2) 1 Se recuerda que los esfuerzos cortantes máximos son iguales a la mitad de la diferencia entre los esfuerzos normales principales y se ubican en secciones a 45° con relación a las secciones de aplicación de los esfuerzos principales, resultado de hacer sin 2 1 : max 1 2 / 2 ; 45 . (1.3) Figura 1.1. Esfuerzos en las secciones inclinadas en una zona de una pieza bajo la acción de esfuerzos planos o bidimensionales. Para el caso en que los dos esfuerzos principales sean iguales (figura 1.1,c): 1 2 -estado denominado de tracción (compresión) biaxial uniforme-, los esfuerzos cortantes en todas las secciones que pasen por el punto de estudio serán iguales a cero, mientras que el esfuerzo normal no cambiará: . Para el caso en que los dos esfuerzos principales sean iguales en magnitud pero diferentes en signo (figura 1.1,d): 1 3 - estado denominado de deslizamiento puro-, los esfuerzos normales y cortantes en los planos inclinados bajo los ángulos = 45° y = 135° son 0 y . El caso más generalizado al planteado hasta ahora consiste en determinar los esfuerzos nomales y y cizallantes actuantes sobre una sección bajo cualquier ángulo , dada una combinación de esfuerzos normales y y cizallantes , en un elemento infinitesimal de una pieza. El problema se ilustra en la figura 1.2. 2 Figura 1.2. Determinación de los esfuerzos normales y cizallantes sobre un plano ubicado bajo un ángulo dado. Proyectando todas las fuerzas en las direcciones normal y tangencial al plano en cuestión: dA dA cos cos dA cos sin ·dA sin cos dA sin sin 0 dA dA cos sin dA cos cos dA sin sin dA sin cos 0 Se obtienen las expresiones para los esfuerzos y : cos 2 sin 2 sin 2 (1.4) 0 ,5 sin 2 cos 2 Igualando los esfuerzos cortantes a cero, se obtienen los planos de ubicación de los esfuerzos principales (o y o+/2): 0 ,5 sin 2 0 cos 2 0 0 , ó tan 2 0 2 / . (1.5) Considerando las relaciones trigonométricas sin 2 0 tan 2 0 1 tan 2 0 2 cos 2 0 0 ,5 1 cos 2 0 ; ; cos 2 0 1 1 tan 2 2 0 sin 2 0 0 ,5 1 cos 2 0 , se obtienen las expresiones para dos de los esfuerzos principales: max 0 ,5 0 ,5 2 4 2 (1.6) min 3 En el caso de estado de esfuerzos biaxial, el tercer esfuerzo es igual a cero, por lo que la definición convencional de los esfuerzos 1, y depende de las magnitudes y signos obtenidos para los esfuerzos max y min. Si uno de los esfuerzos es igual a cero, la expresión anterior se simplifica: max 0 ,5 0,5 2 4 2 (1.7) min Los esfuerzos cortantes máximo y mínimo se hallan igualando a cero la derivada de los esfuerzos cortantes : max 0 ,5 2 4 2 (1.8) min Ejemplo. Determinar la magnitud y dirección de los esfuerzos principales para el elemento mostrado en la figura 1.2, si = 45 MPa, = 32 MPa y = 15 MPa. 2 15 2 ,307 ; 32 45 2 0 6634' ; tan 2 0 0 3317' El signo negativo indica que el ángulo o se cuenta a partir de la dirección del esfuerzo en el sentido de giro de las manecillas del reloj. 45 32 1 45 32 2 4 15 2 37 ,5 16 ,35 53,85 MPa , 2 2 37 ,5 16 ,35 21,15 MPa max min max actúa sobre el área en la dirección o, mientras que min actúa en el área ubicada bajo el ángulo o + /2. Si en el ejemplo dado el esfuerzo cizallante tuviera la dirección contraria, el ángulo obtenido o sería positivo, lo que ubicaría a max a un ángulo o, con respecto a la dirección del esfuerzo , contado en el sentido de giro contrario a las manecillas del reloj. 1.1.1. RELACIÓN ENTRE LAS DEFORMACIONES Y LOS ESFUERZOS Considerando la ley de Hooke para el estado de esfuerzos uniaxial, la relación entre las deformaciones longitudinales y transversales y el principio de independencia de acción de las cargas (superposición), los esfuerzos se relacionan con las deformaciones por las expresiones: 4 1 E( 1 2 ) /( 1 2 ) y 2 E( 2 1 ) /( 1 2 ) (1.9) Para el estado de cargas tridimensional, cuando los esfuerzos principales se conocen, las deformaciones en los ejes principales son determinadas por las expresiones: 1 1 2 3 , E 1 2 2 3 1 , E 1 3 3 1 2 E 1 (1.10) Estas expresiones representan la ley de Hooke generalizada. Si se toman las dimensiones de las aristas de un cubo igual a 1 mm, su volumen es igual a 1 mm3 y el volumen después de la deformación provocada por la aplicación de cargas está dado por: V 1 1 1 2 1 3 1 1 2 3 (1.11) La variación relativa del volumen es: V1 V0 / V0 1 2 3 , (1.12) ó, en términos de los esfuerzos principales: 1 2 1 2 3 / E (1.13) Figura 1.3. El cubo de caucho ABCD sin holguras está incrustado en un molde de acero de manera que puede deformarse por dos de sus caras opuestas, al tiempo que por la cara superior se le aplica una presión p. Se debe determinar el esfuerzo x, las deformaciones y y z y también el cambio relativo v del volumen. El módulo de elasticidad y el coeficiente de Poisson son E y respectivamente; se desprecia la fricción entre el cubo y las paredes del molde [1]. 5 Un ejemplo de aplicación de las expresiones para las deformaciones relativas puede ser el ilustrado en la figura 1.3. Dados y 0 , z p y x 0 , si se desprecia la fricción entre las caras del cubo y el molde y considerando a ésta absolutamente rígida, se obtiene: x p ; y 1 p / E ; z 1 2 p / E; x y z 1 2 1 p / E 1.1.2. ESFUERZOS COMBINADOS Y TEORÍAS DE FALLA Para la mayoría de los materiales de ingeniería son conocidas y reportadas comercialmente las propiedades mecánicas fundamentales limitantes de las máximas cargas simples que en el laboratorio se pueden aplicar a las probetas respectivas en acuerdo con los estándares de pruebas y ensayos. Así, las características del diagrama esfuerzo-deformación de un acero de construcción, obtenidas tras cargar a tracción o compresión una probeta de este material, o su dureza luego de un tratamiento térmico, son reportadas por los fabricantes o procesadores del acero dado. Sin embargo, las piezas de las máquinas pueden ser sometidas a modos de solicitación complejos, en los que no solamente se generan esfuerzos normales, sino también cizallantes, en combinaciones no previstas por las pruebas estandarizadas y no resulta económico para cada combinación de esfuerzos prescribir nuevos montajes de prueba. Por lo anterior se hace necesario disponer de ayudas analíticas que permitan valorar el peligro de que el material, sometido a esfuerzos combinados, esté cercano a perder su elasticidad (en materiales dúctiles) o cercano a la rotura (en materiales frágiles), sin recurrir a complicados montajes experimentales y utilizando sólo la información de las pruebas de estado uniaxiales. Las ayudas analíticas mencionadas se conocen como hipótesis o teorías de resistencia y, a pesar de tener carácter teórico, han sido validadas por los resultados experimentales, teniendo ellas diferentes grados de aplicabilidad, según el caso y el material. Son muchas las teorías que grupos de investigación en diferentes países han elaborado y probado desde mediados del siglo 19. Las teorías de resistencia tienen como premisa que dos estados de esfuerzos cualesquiera son igualmente peligrosos y de igual solicitación si el estado límite se alcanza simultáneamente en ellos al aumentárseles proporcionalmente los esfuerzos principales en una misma magnitud. Para el diseño o cálculos de comprobación de resistencia de los elementos de los sistemas de transmisión de potencia es amplio el uso de las teorías del esfuerzo 6 normal máximo, del esfuerzo cortante máximo y del esfuerzo cortante octaédrico. Según la teoría del esfuerzo normal máximo una pieza, sometida a esfuerzos combinados normales y cizallantes, se encuentra en su estado peligroso si en alguno de sus puntos el esfuerzo máximo supera el límite último de resistencia del material (reducido por los factores modificadores y, considerando, claro, los esfuerzos límites para los esfuerzos normales de tracción o de compresión, según sea el caso). Para el estado de carga compuesto de esfuerzos normales biaxiales y esfuerzo cizallante, la aplicación de la primera teoría de resistencia a un problema de diseño se traduce en la expresión: max 0 ,5 0 ,5 2 4 2 , (1.14) min siendo [] el esfuerzo permisible o admisible de la pieza. Se observa que se obtienen dos esfuerzos principales que pueden ser ambos positivos, ambos negativos o uno positivo y otro negativo. Las comparaciones se harán respectivamente con el esfuerzo último de tracción, el esfuerzo último de compresión o con ambos. La teoría de los esfuerzos normales máximos se verifica experimentalmente con mayor aproximación para materiales bastante frágiles y lo suficientemente homogéneos como vidrio, yeso y algunos compuestos cerámicos. Si sólo se aplican esfuerzos normales en una dirección, la expresión de cálculo por la primera teoría de resistencia se reduce a: max 0 ,5 0 ,5 2 4 2 (1.15) min En diseño se habla de que en la pieza actúa un esfuerzo equivalente: e 0 ,5 0 ,5 2 4 2 (1.16) El esfuerzo equivalente debe interpretarse como el esfuerzo de tracción (o de compresión) uniaxial que debe crearse en la pieza para que su estado de esfuerzos sea igual al estado de esfuerzos complejos real al que está sometida la pieza. Según la teoría de los esfuerzos cortantes o tangenciales máximos el estado peligroso tiene lugar cuando el esfuerzo cortante máximo en algún punto de la pieza sometida a esfuerzos combinados supera el máximo esfuerzo cortante admisible en una probeta sometida tracción max 1 3 / 2 . En el caso particular en el que para un punto sobre el plano de cálculo actúan solamente un esfuerzo normal y un esfuerzo cizallante la expresión de cálculo toma la forma: max 0 ,5 2 4 2 (1.17) min 7 Como el límite de resistencia en cizalladura es igual a la mitad del límite de resistencia en tracción (si 1 0, 2 = 3 = 0, = 1/2 = /2), al hacer uso de esta teoría se deriva un esfuerzo equivalente, que para el caso de combinación de esfuerzo normal uniaxial y esfuerzo cizallante se encuentra como: e 2 4 2 (1.18) La teoría del esfuerzo cortante máximo arroja buen acuerdo con los resultados experimentales para los materiales dúctiles que resisten de igual manera la tracción y la compresión. La aplicación de esta teoría permite también expresar el límite de fluencia en cizalladura en función del límite de fluencia normal: y = 0,5y (1.19) La teoría del esfuerzo cortante octaédrico establece que una pieza se encuentra en su estado límite cuando en algún punto de ella el máximo esfuerzo cortante octaédrico supere el esfuerzo cortante octaédrico presentado en la pieza sometida sólo a tracción, cuando el máximo esfuerzo de tracción ha alcanzado su estado límite. El esfuerzo cortante octaédrico se determina por la expresión: oct 1 3 1 - 2 2 1 - 3 2 2 - 3 2 (1.20) Esta teoría genera las mismas expresiones que la teoría de la energía potencial unitaria de variación de la forma, según la cual el estado peligroso se determina por el valor máximo de la energía unitaria acumulada de variación de la forma, la cual puede compararse con la variación unitaria máxima admisible de la forma de la pieza sometida sólo a tracción. De la teoría del esfuerzo cortante octaédrico puede derivarse una expresión de esfuerzo equivalente, que para el caso más sencillo compuesto de un esfuerzo normal y un esfuerzo cizallante tiene la forma: e 2 3 2 (1.21) La aplicación de esta teoría permite expresar el límite de fluencia en cizalladura en función del límite de fluencia normal (a partir del caso de deslizamiento puro, cuando e 3 2 ; y 3 y ) : y y / 3 0,577 y (1.22) La teoría del esfuerzo cortante octaédrico se emplea ampliamente al calcular elementos, fabricados de materiales dúctiles, sometidos a esfuerzos combinados. 8 1.2. ESFUERZOS VARIABLES Y TEORÍAS DE FATIGA Es común en las piezas de máquinas la rotura ocurrida tras la aplicación repetida de cargas variables de magnitud muy por debajo del límite de resistencia estático. La variedad de este tipo de fallas se agrupa bajo el conjunto conocido de fallas producidas por fatiga del material. En el laboratorio de resistencia de materiales se suele determinar el límite de fatiga de una probeta giratoria de un material dado, sometida a flexión derivada de la aplicación de una carga constante en el centro del vuelo. Los esfuerzos así generados son esfuerzos normales alternativos y simétricos, el esfuerzo medio es igual a cero y el esfuerzo alternativo es igual al esfuerzo normal máximo generado por la flexión. El límite de resistencia hallado para un número de ciclo base en este caso se conoce como límite de fatiga y se denota como -1. Como las piezas mecánicas pueden cargarse con diferentes combinaciones de esfuerzos alternos, a y medios, m, se utilizan las teorías de fatiga para determinar el estado de seguridad de un caso en particular. Entre estas teorías, las más utilizadas son las de Goodman, para materiales frágiles y las de Soderberg y Gerber para materiales dúctiles. La expresión de Goodman relaciona los límites último y de fatiga con los esfuerzos medio y alterno respectivamente, al tiempo que la expresión de Soderberg relaciona los límites de fluencia y de fatiga con los respectivos medio y alterno. Dichas expresiones son: 1 m a y N u -1 1 m a , N y -1 Ecuación de Goodman: Ecuación de Soderberg: (1.23) (1.24) donde N es el coeficiente de seguridad. De las expresiones de Goodman y Soderberg se pueden derivar expresiones para un esfuerzo equivalente de carácter estático, si se multiplican las expresiones por el límite último (para materiales frágiles) o de fluencia (para materiales dúctiles), o de carácter de fatiga bajo régimen alternativo simétrico, si se multiplican las ecuaciones por el límite de fatiga. Es conveniente para los aceros hablar de un esfuerzo de naturaleza estática, equivalente por sus resultados al estado de esfuerzos variables. Multiplicando la expresión de Soderberg a ambos lados por el esfuerzo límite de fluencia, y, se obtiene: e y N m y -1 a (1.25) 9 Análogamente, puede hablarse de un esfuerzo equivalente en cizalladura, cuando está se presenta bajo ciclos variables. e y N m y -1 a (1.26) En las expresiones anteriores podría hablarse de un coeficiente de seguridad según los esfuerzos normales, n, y un coeficiente de seguridad según los esfuerzos cizallantes, n. Como las expresiones e y e tienen ya carácter estático, ellas pueden reemplazarse en las expresiones de esfuerzos combinados, dadas por las teorías de esfuerzo cortante máximo y esfuerzo cortante octaédrico y, considerando el esfuerzo permisible [] igual al límite de fluencia sobre el coeficiente de seguridad, y/N, se puede obtener la expresión generalizada para el cálculo de cualquier componente mecánico sometido a esfuerzos combinados y variables: 2 2 1 1 m a m a N N y -1 y - 1 (1.27) En esta expresión los límites de fatiga normales y cizallantes, -1 y -1, deben modificarse por los concentradores de esfuerzo, los factores de escala, de superficie y de longevidad, al utilizar la fórmula para el cálculo de una pieza en concreto (tal como está se aplica sólo al cálculo de una probeta). La reflexión hecha anteriormente para obtener la ecuación general tiene un carácter práctico y convencional, pero no hay que olvidar que “la teoría de la elasticidad, que permite calcular de una manera precisa los esfuerzos estáticos y sus efectos (alargamientos, flechas, etc.), no parece conducir a resultados exactos de los efectos en los casos de esfuerzos dinámicos y, de manera general, variable. Los materiales no son ni continuos ni homogéneos; la repartición de los esfuerzos no es homogénea porque siempre existen concentraciones de esfuerzos; la ley de Hooke no se aplica exactamente en cargas variables porque se presentan fenómenos de histéresis tras la carga y descarga de la pieza” [1]. El coeficiente de seguridad N de la fórmula anterior es la resultante de un coeficiente de seguridad según los esfuerzos normales y un coeficiente de seguridad según los esfuerzos cizallantes. La fórmula podría plantearse como: N 10 n n n2 n2 N (1.28) 1.2.1. ALGUNAS CARACTERÍSTICAS DE LAS ROTURAS POR FATIGA Entre las conclusiones de los estudios sobre fatiga se afirma que una pieza puede resistir un número indefinido de esfuerzos alternativos cuando no se alcanza el límite elástico en ningún punto y que, en caso contrario, es el trabajo no restituido el que, acumulándose, termina por producir la deformación permanente. Eliminando el metal en ciertas partes de las piezas puede aumentarse la elasticidad de las mismas, lo que las habilita para amortiguar una mayor energía dinámica. La rotura de una pieza de acero por fatiga presenta un aspecto característico, compuesto por dos zonas: una de superficie lustrosa que constituye la fractura por fatiga propiamente dicha (en las aleaciones no ferrosas la zona propiamente de fatiga presenta grano cristalino con de poco relieve) y otra de grano cristalino o fibroso más o menos aparente que forma la fractura final instantánea. Examinando con atención los bordes de la rotura de fatiga muchas veces se distinguen estrías o pequeñas grietas que nacen en defectos de la sección o de la superficie externa. El origen de la rotura por fatiga puede estar en una fisura muy pequeña que se extiende progresivamente hasta el instante en que no existe suficiente metal en la sección como para resistir la carga, produciéndose la rotura brusca e instantánea por deformación plástica o por fragilidad de acuerdo con las propiedades del metal y su sensibilidad a la entalla. La fractura presenta una zona de aspecto liso, resultante del frotamiento prolongado de los bordes de la fisura, y una zona fibrosa o granular en la sección final que resiste la carga. Es común en las piezas que fallan por fatiga la observación de unas divisiones en líneas paralelas o líneas de detención (por los períodos de descanso de la pieza entre los períodos de operación) que corresponden a los sucesivos frentes de la rotura por fatiga. Las líneas de detención también se explican por la deformación plástica del material, la cual le permite aumentar su resistencia y por un tiempo (por unos ciclos) aguantar la carga. Cuando la rotura ocurre tras una sobrecarga fuerte, ella se origina en varios puntos situados en planos diferentes. Los cambios de sección, los sitios de montajes y formas de fijación de las piezas, las perforaciones y ranuras para pines o conductos de lubricación, las superficies roscadas, estriadas o dentadas, los sitios de montajes con ajuste (considerados como concentradores de esfuerzos) y las rayas de mecanizado (acabado superficial) sirven frecuentemente de orígenes de las fallas por fatiga. Cuanto mayores sean las dimensiones de las piezas (mayor escala), mayor es la probabilidad de la rotura por fatiga. Los análisis de las fallas de piezas pueden iniciarse en la búsqueda de la posición y orientación del origen, los cuales son definidos por los modos de solicitación a los que las piezas se han sometido. 11 La naturaleza de la rotura por fatiga se ha buscado explicar con muchas teorías, entre las que figuran la teoría de los esfuerzos secundarios de Grifith, la teoría de la histéresis de las deformaciones seudoelásticas, la teoría del deslizamiento molecular, la teoría del amortiguamiento interno. Es importante desarrollar y emplear métodos para la detección de grietas o fisuras de fatiga, de suerte que se pueda detectar a tiempo, al comienzo de su aparición, de suerte que se puedan desmontar o sacar de operación y evitar a tiempo las consecuencias de una rotura no prevista. 1.2.2. ANÁLISIS DE CASOS DE ROTURAS POR FATIGA A continuación, a manera de ejemplo se detalla el análisis macroscópico realizado a dos piezas que fallaron por fatiga: el cigüeñal de un motor fuera de borda y una de las barras guía de una máquina inyectora de plástico. Las fallas por fatiga son muy comunes en los cigüeñales de los motores, árboles que trabajan en regímenes muy variados de carga y revoluciones. Particularmente exigentes son las condiciones para este tipo de árboles en los motores fuera de borda, porque además de los regímenes de operación tienen mucha influencia los factores ambientales y las condiciones de conservación. A continuación se expone el concepto dado a la rotura de un cigüeñal de un motor fuera de borda Yamaha de cuatro cilindros, dos tiempos, tras el análisis de las secciones y las superficies de las piezas partidas. El cigüeñal en este tipo de motores se apoya completamente en rodamientos de agujas partidos. Las bielas también se articulan con los pasadores de pistón y muñones de bielas mediante rodamientos de agujas (canastillas). El material en su núcleo no presenta defectos de grietas y su estructura es totalmente homogénea. Las características tanto de núcleo como de superficies son las de un acero de alta resistencia y elevada templabilidad (figuras 1.4 y 1.5). Estos aceros son de elevada sensibilidad a la concentración de esfuerzos y defectos de superficie. Figura 1.4. 12 Figura 1.5 La superficie de las piezas en la zona de rotura correspondiente al sitio de montaje de la volante no tiene un acabado acorde con una o dos montadas cuidadosas de la misma; la zona presenta ralladuras (ver figuras 1.6 y 1.7) que no son propias de un motor nuevo o siquiera de una sola desmontada; no ha habido un montaje cuidadoso de la volante, luego de los posibles desmontes que haya sufrido, hay ralladuras excesivas no originales, las cuales hacen de concentradores de esfuerzos. Figura 1.6. Figura 1.7. La zona interior de montaje de la volante en las piezas presenta un decapamiento de considerable espesor, causado por corrosión (color rojizo del óxido de hierro, ver figura 1.8). No es normal tal estado de corrosión, a menos que se haya estado guardado sin operar y en condiciones no muy bien protegidas (lo que se puede haber dado por estancamiento de humedades en ese intersticio durante largas paradas, agravadas por las condiciones de salinidad en la costa). Existen en el borde de la superficie donde se inició la rotura suficientes discontinuidades y porosidades de corrosión (ver figura 1.9), para que las pequeñas cargas de flexión y de torsión surgidas durante el trabajo y las arrancadas originaran una destrucción por fatiga. Figura 1.8. Figura 1.9. En la zona externa de la sección de corte se observan profundizaciones, a manera de estrías, de las irregularidades superficiales (ralladuras y porosidades de corrosión) que tienen el aspecto estrella de puntas múltiples (ver figura 1.10) propio de las roturas de fatiga iniciadas por corrosión. 13 Figura 1.10. Figura 1.11. En esta zona se inició la destrucción de la pieza. Los pequeños esfuerzos de flexión existentes en este tramo fueron suficientes para iniciar la propagación de la grieta. La grieta se propagó por flexión, de lo que son prueba los surcos descentrados; luego hubo un arranque de un pedazo de material (ver figura 1.11) que no se encontró, pero que al empatar las partes, se ve claro que no está y que se desprendió mucho antes. Con la sección debilitada y la grieta ya profundizada continuó el proceso de fatiga por flexión, ya con un ligero desbalanceo del extremo del eje. Los surcos espaciados (ver figura 1.6) muestran que durante las arrancadas la grieta se iba propagando. En unas arrancadas posteriores, ya más desbalanceado el extremo del eje y con la carga del arranque (cerca de 200 N·m de par de arranque) la grieta se propagó por torsión (se aprecia un ángulo de aproximadamente 45 en la segunda fase de la rotura) intensivamente hasta que en la pequeña zona de grano superfino se desprendió el conjunto (ver figuras 1.12 y 1.13). Figura 1.12. Figura 1.13. En síntesis la rotura es de fatiga de corrosión iniciada por flexión y terminada por torsión y se inició por irregularidades y ralladuras causadas durante el montaje de la volante y, mayormente por la corrosión superficial (un mal cuidado o una mala conservación). No hay problemas de material ni en el núcleo, ni en la superficie. Los problemas de agrietamiento previo del extremo del eje generaron irregularidades de funcionamiento del motor, ya que en ese extremo se encuentra el generador: una irregularidad de flujo magnético se manifiesta en 14 irregularidades del sistema de carga y del encendido y se pudo haber detectado de haber desmontado la volante a tiempo. Figura 1.14. Figura 1.15. El factor de concentrador de esfuerzo en la zona corroída fue mucho mayor que el del chavetero y esto es mucho decir, por que la falla, de iniciarse en un cigüeñal, debía iniciarse allí o en el hombro, antes que en la superficie lisa, pero se reitera que estaba mal cuidada, mal tratada. Diagnóstico de Eje de una Inyectora de Plástico El eje guía y apoyo de las placas de la inyectora presenta evidencias de haber fallado por fatiga en flexión. El eje está diseñado para trabajar sólo en tracción, bajo ciclo pulsante. Sin embargo, tolerancias en el sistema de regulación de la posición de la placa de apoyo originaron que ésta se atravesara y se sometiera a flexión, lo que combinado con una pequeña falla superficial en la rosca del tornillo, con tratamiento superficial evidente, terminó originando la rotura. Figura 1.16. Imperfecto en el diámetro interno rosca, en el que se origina el inicio de la falla por fatiga. Se observan las maclas de una falla progresiva de fatiga con carga de flexión. Un desvanecimiento dúctil ocurrido con pocos ciclos. 15 Figura 1.17. Zona de inicio de la rotura. Una imperfección o pequeña grieta, no es claro que la puedo haberla causado fue extendiéndose en la periferia. Figura 1.18. Dos zonas en la rotura por fatiga: la zona izquierda evidencia las maclas, al tiempo que la zona derecha tiene la apariencia rugosa y abrupta de la rotura frágil. El grano es bastante fino, propio de los materiales para ejes que eventualmente pueden soportar cargas de impacto. Figura 1.19. Última zona de resistencia. Se puede ver la zona final de rotura, en la que el material continúa desprendiéndose de manera profunda, soportándose por los hilos de la rosca, en los cuales termina cizallándose. 16 Figura 1.20. Debilitamiento en el entorno de la rosca (presencia de escamas). Iniciada la reducción del área, las inmediaciones del diámetro interno son más sensibles a la fatiga, por tener un tratamiento para darle resistencia a la abrasión. 1.3. CÁLCULO POR CARGAS DE IMPACTO “Una cargas se considera que es de impacto cuando el tiempo que tarda la respuesta en alcanzar su máximo valor es menor que el más bajo período natural de vibración del cuerpo incidido. Si el impacto es ocasionado repetidamente, puede adicionalmente causarse un debilitamiento por fatiga con impacto. Si la velocidad de aplicación de una carga variable aumenta, la frecuencia de la carga aplicada llegará a ser mayor que la frecuencia de respuesta, y en este caso el fenómeno corresponde a la definición de carga por impacto” [4]. La aplicación de la mayoría de las cargas sobre las piezas no se produce bajo la consideración de carga estática. En el arranque de cualquier máquina, salvo que se implementen dispositivos especiales, la carga aplicada (y la potencia demandada) es mayor que la nominal; entre los dientes de los engranajes, al iniciarse la transmisión de potencia, existe una holgura (si son muchos los engranajes en serie engranados existen muchas holguras); en todas las articulaciones de los mecanismos existen holguras. En la medida en que a un dispositivo con holgura se le aplique una carga en un tiempo muy pequeño, habrá implicaciones dinámicas cercanas a las de impacto. Por el principio de la transmisibilidad, si en una caja de velocidades, por ejemplo, el momento torsor de entrada tiene características de impacto, las cargas radiales y axiales, y los momentos flectores sobre los ejes, lo mismo que las reacciones en los apoyos tendrán características de impacto también. 1.3.1. CÁLCULO POR IMPACTO DURANTE LA APLICACIÓN DE UNA CARGA AXIAL Para evaluar la influencia de la acción dinámica de la carga sobre la deformación o tensión se usa el coeficiente dinámico: 17 kd d est (1.29) siendo est la deformación del elemento elástico durante la aplicación estática de la carga Q y d la deformación durante la aplicación de impacto de la carga. Figura 1.21. Representación esquemática para el cálculo del impacto por carga axial [3]. La relación entre los esfuerzos dinámicos y estáticos se expresa así, mediante el coeficiente dinámico: Q d k d est k d (1.30) F La relación entre los esfuerzos y las deformaciones se mantiene igual tanto para la carga estática Pest como para la dinámica Pd: Pest c P d d c est siendo c EF la rigidez de la barra. l El cambio en la energía potencial de un peso T al caer desde una altura H y recorrer el trayecto H + d será: (1.31) T Q( H d ) La energía potencial de deformación de la barra, acumulada durante el impacto: Ud c e 1 Pd d d 2 2 (1.32) Considerando el principio de conservación de la energía: T = Ud c d2 Q( H d ) 2 18 (1.33) considerando que est = Q/c: d2 2 est · d 2 est H 0 De aquí, la deformación dinámica: 2 d est est 2 estH (1.34) La expresión anterior se puede presentar en la forma: d est 1 1 2 H est Por consiguiente el coeficiente dinámico de acuerdo con (1.30) es: 2H kd 1 1 (1.35) est como H = v2/2g (v es la velocidad del peso caído al inicio del impacto), entonces: kd 1 1 puesto que 2H est v2 gest (1.36) To , siendo To = QH = Qv2/2g la energía cinética del peso caído U est en el momento del impacto y Uest=Q·est/2 la energía potencial de deformación de la barra durante la aplicación estática de la carga Q, el coeficiente dinámico se expresa: kd 1 1 To U est (1.37) cuando H = 0, Kd = 2. puesto que por regla general H >> est, entonces: kd 1 2H est 1 v2 est 1 To U est (1.38) Esfuerzo dinámico durante el impacto: d k d est est 1 1 2 H Q 2QHE est F IF (1.39) La carga dinámica durante el impacto: 19 2H Pd d F k d est F Q 1 1 est (1.40) 1.3.2. ESFUERZO DURANTE EL IMPACTO TORSIONAL Dado el caso de caída de un peso Q sobre una manivela empotrada en un árbol, el esfuerzo de cizalladura máximo en el árbol se determina, de manera general, por la expresión d max k d estmáx (1.41) donde k d 1 1 Figura 1.22. Representación esquemática elementos cargados a impacto torsional [3]. est R estmáx 2H est (1.42) de M tor l QR 2 l R ; GI p GI p M tor QR Wp Wp H es la altura de caída del peso; Q es el peso de la carga que cae; R es el radio de la manivela; l es la longitud del árbol; Ip, Wp son el momento de inercia polar y el módulo polar de la sección, respectivamente. La energía cinética: (1.43) T o = Ud Ud es la energía potencial de deformación del árbol durante la torsión de impacto. Teniendo en cuenta que Ud M2 l 1 M tor .d d tor .d 2 2GI p (1.44) y, considerando que d max M tor .d Wp ó M tor .d d max ·W p d 3 16 d max se puede escribir que Ud 20 d2 max 2 d 6 l 16 2 GI p ·2 d2 max lF 2G (1.45) Sustituyendo (1.45) en (1.43) y despejando el esfuerzo dinámico máximo: d max 2 To G lF (1.46) 1.3.3. CÁLCULO POR IMPACTO DURANTE LA FLEXIÓN Por analogía con los casos anteriores, los esfuerzos dinámicos máximos durante la flexión de impacto: d max k d est max siendo k d 1 2H f est el coeficiente dinámico. Figura 1.23. Representación esquemática de una viga sometida a impacto de flexión [3]. fest es la flecha estática en el lugar del impacto que depende del esquema de solicitación y las condiciones de apoyo. En el caso de impacto en la mitad de la viga con rigidez a la flexión de la sección EI se tendrá: Ql 3 M Ql f est , est max 48 EI W 4W Y los esfuerzos dinámicos máximos en este caso serán: d max k d est max Ql 4W 96 To EI 1 1 Q 2 l 3 designando QH = To, entonces: d max Ql 4W 1 1 96T2o EI Q l3 (1.47) La condición de resistencia: d max Q 4W 1 1 96 T2o EI Q l3 d f d , (1.48) nd 21 Donde nd es el coeficiente de seguridad contando con la carga dinámica; f es el límite de fluencia del material de la viga; la energía cinética del peso es Qv12/2g. 1.4. COLUMNAS PARA CARGAS CENTRADAS Cuando un elemento es sometido a una carga de compresión, dependiendo de su forma, dimensiones y material, puede perder su estabilidad de forma, sin que necesariamente pierda su resistencia. Este tipo de fenómeno puede hacer que los mecanismos pierdan su funcionalidad. La varilla de accionamiento de un embrague multidisco, los émbolos buzos de las bombas y las agujas de los inyectores, las bielas en los motores y compresores, los varillajes de los mecanismos de accionamiento deben prever en su diseño este fenómeno. El cálculo a la estabilidad o el pandeo en los elementos estructurales, en las construcciones civiles es un cálculo obligatorio de diseño. En el diseño de elementos de máquinas, el cálculo al pandeo de los elementos, usualmente, es un cálculo de comprobación. A la pérdida de forma se someten los elementos con cierto grado de esbeltez, entendiendo por esbeltez la relación de la longitud efectiva de pandeo, Le, sobre el radio de giro de la sección, k. Como el radio de giro es la relación entre el momento de inercia I y el área, A de la sección, los cálculos consideran, inicialmente, el menor de los momentos de inercia. De haber pandeo en un elemento o pérdida de estabilidad, ésta se producirá, con mayor probabilidad, en torno al eje con respecto al cual la sección posee menos inercia (sin embargo, se han observado bielas en motores de combustión, con sección en I, en las cuales el pandeo se ha producido en torno a los dos ejes). Los cálculos de los elementos esbeltos sometidos a compresión o cálculos de columnas centradas están orientados a verificar que la carga aplicada sobre el elemento esté por debajo de la carga crítica, Fc, que produce el pandeo de éste, según el material de que él esté hecho. Para los cálculos de la carga crítica de las denominadas columnas largas, sin rozamiento en los extremos, se emplea la fórmula de Euler, la cual tiene la forma: Fc 2 ·E · A Le k 2 , (1.49) donde Fc es la carga concéntrica axial, llamada carga crítica, que origina que la columna esté en el punto de iniciación del pandeo y E es el módulo de elasticidad del material de que está hecha la columna. 22 Figura 1.24. Esquema de cálculo de una columna con carga centrada. En la expresión de Euler no se incluye la característica de resistencia del material y daría la impresión que cualquier carga que no supere la crítica puede ser soportada por la columna, así el esfuerzo generado de compresión supere el límite de fluencia. Por esto la fórmula de Euler es válida sólo por encima de cierto valor de esbeltez, Le/k. Para estar seguros de que no hay peligro de pérdida de elasticidad, o de rotura de la piezas, la carga real F sobre una columna debe ser menor que Fc, es decir, el coeficiente de seguridad o el coeficiente de cálculo N debe ser aplicado ahora a la carga F: N Fc F (1.50) Para una sección transversal y una longitud determinada, la capacidad de carga, Fc de una columna depende sólo del módulo de elasticidad E. Como los valores del módulo de elasticidad, E para todos los aceros es muy cercano, el cambio de un acero de baja resistencia por otro de mayor resistencia no genera mayor incremento de la carga critica que puede soportar la columna. 1.4.1. LONGITUD EFECTIVA O LIBRE La forma de aseguramiento de la columna determina la forma de pandeo principal. Los esquemas simples de aseguramiento de las columnas se ilustran en la figura 1.25. La ecuación de Euler se aplica a una columna con extremos empotrados de manera arbitraria, tomando la longitud de pandeo igual a la distancia entre las secciones libres de momento flector; a esta longitud se le denomina longitud libre o efectiva Le. Considerando el coeficiente de seguridad de seguridad, N, la ecuación de Euler toma la forma: 2 ·E · A 2 ·E· A 2 ·E·I ó (1.51) F Fc N F 2 2 N ·L2e Le Le N k k 23 Para columnas estructurales, calculadas por la fórmula de Euler, el coeficiente de seguridad tiene un valor cercano a N = 3,5. a) b) c) d) Figura 1.25. Formas de deformación de las columnas, para diferentes formas de empotramiento. Según el tipo de apoyos en los extremos, la columna aguantará una mayor carga si los apoyos son de tipo empotramiento (figura 1.25,b), con Le = L/2, y la columna con un extremo libre será a la que se le podrá aplicar la menor carga (figura 1.25,d), con Le = 2L. 1.4.2. COLUMNAS CORTAS Por debajo de cierto valor de esbeltez, Le/k, para cada material, la fórmula de Euler queda limitada por la resistencia de fluencia: por debajo de cierto valor la pérdida de la funcionalidad puede ser debida a una pérdida de elasticidad y, para prevenir esto durante el diseño, se debe calcular la carga de compresión que no produce el pandeo y que además garantiza la conservación de las deformaciones de compresión dentro de la zona de elasticidad del material. Se utiliza en este caso la ecuación o criterio de Johnson, la cual establece el valor de la carga crítica como: 2 y Le k Fc y · A1 4 2 ·E ó 2 y Le k F , e 1 A 4 2 ·E (1.52) El coeficiente de seguridad con la fórmula de Johnson en consideración se expresa también como la relación de los esfuerzos N = Fc/F = y/e; siendo F/A el esfuerzo real nominal. Las constantes en la ecuación de Johnson son tales que la curva es tangente a la curva de Euler y siempre en Fc/A = y/2. 24 En el cálculo de las columnas se utilizan otras fórmulas, diferentes a las de Euler y Johnson, como la fórmula de la secante, la cual considera cierto valor de excentricidad, e, en la aplicación de la carga. La forma de la función de Euler es una hipérbola, la forma de la función de Johnson es una parábola invertida, con vértice en el límite de fluencia. Se emplean también fórmulas lineales, como las empleadas en las edificaciones urbanas y las para columnas fabricadas de fundición de hierro. 1.4.3. PUNTO DE TRANSICIÓN ENTRE COLUMNAS LARGAS E INTERMEDIAS El punto de tangencia de las funciones expresadas por las fórmulas de Johnson y Euler corresponde, para cada material, a un valor de Le/k determinado, que marca los límites de aplicación de las dos teorías, denominado valor de transición entre las columnas cortas y las columnas largas. Este valor se halla igualando las derivadas con respecto a Le/k de las dos funciones: [d(F/A)/d(Le/k)]E=[d(F/A)/d(Le/k)]J . Igualando los valores de Fc/A, se obtiene el valor de transición de Le/k. En general, se emplea la fórmula de Johnson cuando Le/k es menor que el valor correspondiente al punto de tangencia; se usa la fórmula de Euler cuando Le/k es mayor que dicho punto. La fórmula de Johnson es la que, en general, se emplea más para el cálculo de elementos de máquinas; la fórmula de Euler es más empleada en elementos de construcción y estructuras metálicas. En el cálculo de resistencia, el área de la sección de una columna se podrá tantear como A = F/e, (e = y/N), utilizando para el esfuerzo equivalente, e, la expresión de Euler (fórmula 1.54) o la expresión de Johnson (fórmula 1.53). F 1 F Por Johnson, e (1.53) 2 A A Le y k 1 4 2 ·E L 2 e F y k F Por Euler, e (1.54) 2 A ·E A Los esfuerzos equivalentes encontrados por las expresiones (1.53) y (1.54) se suman, donde se esté aplicando también flexión, a los esfuerzos normales generados por ésta. 25 1.5. ESFUERZOS DE CONTACTO Los esfuerzos y deformaciones que surgen durante la presión mutua de dos cuerpos contiguos se denominan de contacto. El material en el lugar de contacto, sin poder deformarse libremente, se halla en estado de esfuerzos volumétrico (figura 1.26). Los esfuerzos de contacto tienen un carácter puramente local y disminuyen muy rápidamente a medida que se alejan del lugar de contacto. Hay que presentar especial atención a los esfuerzos de contacto durante el cálculo a la resistencia de tales piezas como son los rodamientos de bolas y rodillos, las ruedas dentadas, las ruedas de vagones ferroviarios, rieles, etc. Figura 1.26. Esquema representativo para el cálculo de los esfuerzos de contacto en elementos contiguos [3]. 1.5.1. COMPRESIÓN DE ESFERAS El radio en la zona circular a que se forma en el lugar de contacto durante la presión mutua con la fuerza P de dos esferas de radios R1 y R2 y módulos de elasticidad E1 y E2, respectivamente, se determina mediante la fórmula: 1 1 E E2 a 0 ,88 3 P 1 (1.55) 1 1 R1 R2 Los esfuerzos normales (de compresión) están distribuidos en la zona de contacto por una semiesfera. El esfuerzo máximo, que tiene lugar en el centro de la zona de contacto, puede determinarse por la fórmula: 3 max 1,5 P 0 ,388 a2 3 4P E12 E22 R1 R2 E1 E2 2 R12 R22 2 (1.56) Los demás esfuerzos principales en el centro de la zona son iguales a: 1 2 0 ,8 max Gracias al estado de esfuerzos volumétrico del material en el centro de la zona de contacto, cuando los tres esfuerzos de compresión son prácticamente iguales, el material de ese punto puede resistir, sin que aparezcan deformaciones permanentes, unas presiones bastante grandes que son, por ejemplo, de acuerdo 26 con la teoría del esfuerzo cortante máximo, iguales a max 5 y . Para el acero que tiene y 1000 MPa, max alcanza 5000 MPa. El punto más peligroso en la zona de contacto está situado sobre el eje z a una profundidad igual a la mitad del radio de la zona de contacto, aproximadamente. Los esfuerzos principales en este punto son iguales a: 1 2 0 ,18 max ; 3 0 ,8 max (1.57) Determinándose max por la expresión (1.56). El esfuerzo cortante máximo en el punto peligroso es: max 1 3 2 0 ,31 max (1.58) 1.5.2. COMPRESIÓN DE CILINDROS Durante la compresión mutua por una carga distribuida uniformemente q de dos cilindros que se tocan con las generatrices paralelas, el ancho de la zona de contacto rectangular se determina mediante la expresión: 1 1 E E2 (1.59) b 2 ,15 q 1 1 1 R1 R2 El esfuerzo máximo que actúa en los puntos del eje de la zona de contacto se haya por la expresión: E E R R2 q (1.60) max 1,27 0 ,418 2 q 1 2 1 b E1 E 2 R1 R2 El punto peligroso en la zona de contacto se encuentra sobre el eje z a una profundidad igual a 0,4b. Los esfuerzos principales en este punto tienen los siguientes valores: 1 0 ,180 max ; 2 0 ,288 max ; 3 0 ,780 max . (1.61) El esfuerzo cortante máximo en el punto peligroso es: max 0 ,3 max (1.62) 27 Cambiando en la fórmula 1.60 el signo de R2 por el inverso se obtiene el esfuerzo en el caso de que la presión del cilindro sea sobre una superficie cilíndrica cóncava: max 0 ,418 2q E1 E 2 R2 R1 E1 E 2 R1 R2 (1.63) Durante la presión mutua del cilindro de radio R1 = R y el plano, tomando en (1.60) R2 = , se tendrá: 2 q E1 E2 max 0 ,418 (1.64) R E1 E2 Las anteriores fórmulas fueron obtenidas para el coeficiente de Poisson = 0,3. Sin embargo, en los cálculos prácticos son también válidas para otros valores de . Ejercicio. Analizar las cargas y definir los criterios de cálculo de los elementos componentes del mecanismo de conmutación de cambios de una caja de velocidades, mostrado en la figura 1.27. Figura 1.27. Mecanismo de conmutación de cambios de una caja de velocidades. 28 BIBLIOGRAFÍA. [1] STEPIN, P. A. Resistencia de Materiales. Escuela Superior, sexta edición. Moscú, 1979. [2] TIMOSHENKO, S. Resistencia de Materiales. Espasa-Calpe, S. A. Madrid, 1978. [3] PISARENKO, G. S. y otros. Manual de Resistencia de Materiales. Mir. Moscú, 1989. [4] FAIRES, V. M. Diseño de Elementos de Máquinas, Limusa, México: 1995. [5] CAZAUD, R. La Fatiga de los Materiales. Aguilar. Madrid, 1957. [6] HALL, A. S. y otros. Diseño de Máquinas, serie Schaum. McGraw-Hill. México, 1987. 29 30