Teoría de Sistemas y Señales s K K
Anuncio

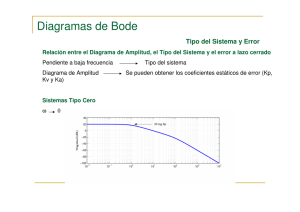
Teoría de Sistemas y Señales Problemas Propuestos - Serie 6 Descripción: Diagrama de Bode y Estabilidad 1. Dados los siguientes polinomios denominadores de Funciones Transferencias racionales, determine si existen raíces en el eje imaginario o en el semiplano derecho. a ( s ) = s 5 + 5s 4 + 11s 3 + 23s 2 + 28s + 12 7 6 5 4 3 2 b. a ( s ) = s + 8s + 21s + 10 s + 5s + 12 s + 6 s + 3 4 3 2 c. a ( s ) = s + 8s + 32 s + 80 s + 100 5 4 3 2 d. a ( s ) = s + 10 s + 30 s + 80 s + 344 s + 480 4 3 2 e. a ( s ) = s + 2 s + 7 s − 2 s + 8 3 2 f. a ( s ) = s + s + 20 s + 78 a. 2. Hallar el rango de valores de K para el cual todas las raíces del siguiente polinomio están en el semiplano izquierdo a ( s ) = s 5 + 5s 4 + 10 s 3 + 10 s 2 + 5s + K 3. Hallar el rango de valores de K p y K I tal que el sistema con retroalimentación PI (Proporcional + Integral) de la figura sea asintóticamente estable. + Kp + KI s 1 ( s + 1)( s + 2) _ 4. La ecuación diferencial que describe un motor de corriente continua con excitación independiente constante, si se desprecia la inductancia de armadura, está dada por ω ' (t ) + Rb + k 2 k 1 ω (t ) = u a (t ) − τ ( t ) RJ RJ J (1) ω (t ) , es la velocidad del motor, u a (t ) es la tensión de armadura, τ (t ) es el torque de carga, R es la resistencia de armadura, J es el momento de inercia del rotor, k es la constante de conversión electro-mecánica, y b es el coeficiente de rozamiento en el eje del motor. Para regular la velocidad del motor respecto a una velocidad de referencia ω ref , se mide la donde velocidad del motor y se computa la tensión de armadura como una función del error ε = ω ref − ω de la siguiente forma t ua (t ) = k pε (t ) + k I ∫ ε (τ )dτ 0 a. Determinar el rango de valores de las ganancias k p y k I para que el sistema con retroalimentación sea asintóticamente estable. Suponga que los parámetros del motor asumen valores tales que la ecuación diferencial (1) resulta TeSyS Página 1 de 4 ω ' (t ) + 60ω (t ) = 600ua (t ) − 1500τ (t ) b. Hallar la función transferencia entre la entrada salida ω. c. Calcular los valores de las ganancias ω ref y la salida ω , y entre la entrada τ y la k p y k I para que el sistema en lazo cerrado tenga polos en − 60 ± j 60 . 5. 6. Trazar los Diagramas de Bode de Amplitud y Fase de los siguientes sistemas, y siempre que sea posible determinar la frecuencia de cruce por cero, y la frecuencia para la cual la fase es -180°. a. G( s) = b. G( s) = c. G( s) = d. G( s) = e. G( s) = f. G( s) = g. G( s) = h. G( s) = i. G( s) = j. G( s) = 1 (s + 1) (s 2 + s + 4 ) s (s + 1)(s + 10)(s 2 + 5s + 2500) 4 s (s + 10) (s + 50)(4 s 2 + 5s + 4 ) 10(s + 4 ) s (s + 1)(s 2 + 2 s + 5) 1000( s + 1) s (s + 2 )(s 2 + 8s + 64 ) (s + 5)(s + 3) s (s + 1)(s 2 + s + 4 ) 4000 s (s + 40 ) 100 s (1 + 0.1s )(1 + 0.5s ) 1 s (1 + s )(1 + 0.02 s ) s −1 s (1 + s )(1 + 0.02 s ) 2 La figura representa el Diagrama de Bode asintótico (de Amplitud) de un sistema lineal estacionario. Determine y grafique la respuesta del sistema a un escalón unitario de entrada, asumiendo condiciones iniciales nulas. G ( jω ) 10 1 0.1 1 7. 10 100 ω 1000 La función transferencia de un SLE es G (s) = A502 - TeSyS ωn 2 s 2 + 2ξω n s + ω n 2 . Página 2 de 4 Verificar que el Ancho de Banda Bω del sistema se puede calcular como Bω = ω n 1 − 2ξ 2 + 2 + 4ξ 4 − 4ξ 2 . 8. La función transferencia de un SLE es ωn s 2 G (s) = s 2 + 2ξω n s + ω n 2 . a. Determinar analíticamente la amplitud y fase de la transferencia armónica función de la frecuencia normalizada ω ωn , para G ( jω ) , y graficarlas en ξ = 0.1, 0.25 , 0.5 ,1 . Bω como la distancia entre las frecuencias a ambos lados de ω n para las cuales la amplitud cae 3 dB por debajo de su valor a la frecuencia ω n , mostrar que el ancho de b. Si se define el ancho de banda banda así definido está dado por Bω = 9. ξω n . π En cada uno de los siguientes casos, trazar los Diagramas de Bode de amplitud y fase para K = 1 . Determinar el rango de valores de K para que el sistema en lazo cerrado con retroalimentación unitaria sea estable. a. KG ( s ) = b. KG ( s ) = f. KG ( s ) = g. KG ( s ) = K ( s + 2) s + 10 K (s + 10)(s + 2 )2 K (s + 10 )(s + 1) c. KG ( s ) = (s + 100)(s + 2 )3 K (s + 1) d. KG ( s ) = 2 s (s + 10 ) K (s + 1) e. KG ( s ) = s (s + 2 ) K (s + 2 ) s 2 + 9 ( K (s + 1) s 3 (s + 10 ) ) 2 10. Trazar el Diagrama de Bode para el sistema de la figura, y determinar el rango de valores de que el sistema sea estable, usando el criterio de Routh. + K para 1 s + 2s + 2 K 2 _ 1 s +1 TeSyS Página 3 de 4 11. La función transferencia en lazo abierto de un SLE es s 100 + 1 10 G (s) = s s s − 1 + 1 1 100 a. Hacer un diagrama de Bode de amplitud y fase. b. Indicar si el sistema en lazo cerrado con retroalimentación unitaria es estable. 12. Idem problema 11., para el sistema cuya FT en lazo abierto es G (s) = 25(s + 1) . s (s + 2 ) s 2 + 2 s + 16 ( ) 13. Dado el sistema representado en la figura + 1 s −1 K _ s+2 (s + 1)2 + 1 a. Determinar la estabilidad del sistema a lazo cerrado para todos los valores de criterio de Routh. b. Trazar el diagrama de Bode del sistema. A502 - TeSyS K , usando el Página 4 de 4