Document
Anuncio

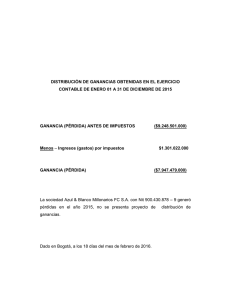
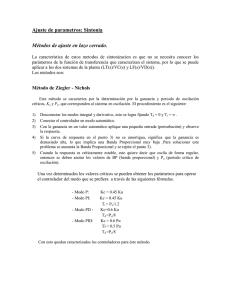
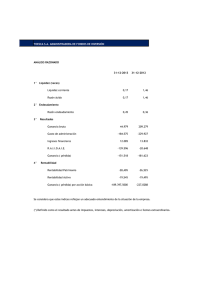
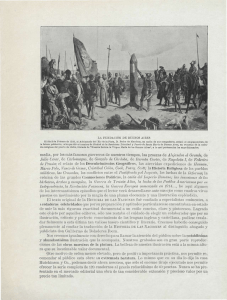
Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. KK • I • I .. .. K K • I • I 1 V I 1 .. .. I V Página 171 − β K • FS • Cp S • (Tin − TK ) 1 (Tamb − T K ) 1 K 1 α' .. .. = * K2 α ' .. .. U • Ak (Tamb − TK ) V α ' − β K • FS • Cp S • (Tin − T K ) V Ec_ E-11 para V serie de datos. Tras la ejecución de este algoritmo se obtiene la siguiente matriz de valores: K1 Celda 02 Celda 49 Celda 99 0.0397 0.0372 0.0394 278.8436 372.4970 344.7155 542.1017 617.0298 530.3066 α' K2 α' U • AK α' Tabla 9. Resultados de parámetros para modelo de celda electrolítica. donde las unidades de cada término son: K1 α' en kcal kcal kcal ; K 2 en ; U • AK en 2 α' α' h·(kA) h·kA h·º C Las tres ilustraciones que se muestran a continuación y que devuelve este programa muestran los valores que devuelve una de las partes de la igualdad de la Ec_ E-11 para cada punto y para cada una de las tres celdas. Se representa potencia calórica, en kcal y ordenadas, frente a tiempo, en minutos y abscisas : h Página 172 Autor: Alberto Ojeda Pérez Celda 02 Celda 49 Celda 99 Ilustración E.II-2 Potencia calórica calculada por mínimos cuadrados para las celdas Como se podrá observar en el algoritmo, se representan en verde los valores simulados, es decir correspondientes al término A* X del sistema lineal A* X = B , mientras que en rojo se representan los valores no simulados, es decir B de un sistema como el anterior. Finalmente el programa realiza un análisis de la solución alcanzada comprobando la similitud entre los dos términos a banda y banda de la igualdad de la Ec_ E-11 para cada uno de los datos recogidos. Se ha representado una línea negra sobre la gráfica para mostrar la región considerada como de solución correcta para los datos. Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 173 Ilustración E.II-3 Comprobación del resultado obtenido por mínimos cuadrados Como se puede observar los valores oscilan aleatoriamente entorno a esta recta de manera proporcional a ambos lados de la misma con lo que se considera como satisfactorio. E.III Validación del modelo Una vez resuelto el sistema de incógnitas se procede, como medida de validación, a la aplicación de la solución alcanzada sobre los datos de origen así como sobre otros datos recogidos en planta. A tal efecto se crearon dos programas que se muestran a continuación de forma cronológica. El primero de ellos fue el fichero mincuadrados.m. Este fichero parte de la matriz de soluciones, So en programa, obtenidas en el anterior subapartado. Para esto se ha identificado So como el término X de un sistema A * X = B . Al final se realizan cuatro representaciones gráficas. Las tres primeras corresponden a gráficas de valores reales y simulados de potencia calórica para cada uno de los puntos o datos de origen. La última gráfica representa la dispersión de los valores de solución tal y como hiciera el anterior algoritmo. Página 174 Autor: Alberto Ojeda Pérez Célula 02 Célula 49 Célula 99 Gráfica Q(vs)Qs Ilustración E.III-1 Validación de solución empleando datos: 24 horas de 7 agosto 2003 a 8 agosto 2003 En las gráficas de cada celda, los valores simulados (verde) reaccionan similarmente a los valores reales (rojo) con un cierto desvío o “offset” que se mantiene prácticamente constante. También se aprecia una respuesta demasiado rápida por parte de los datos simulados. La existencia del “offset” tiene su origen en el modelo propuesto y las asunciones y aproximaciones del mismo debido a la complejidad del modelado de una reacción electrolítica. Tal y como se está mostrando y se plantea en la configuración del modelo, no es necesario la obtención de un modelo complejo para el modelado del sistema. Gracias a este modelo sencillo, modelo “caja gris”, se obtiene un comportamiento muy similar al sistema real así como un modelo que no requiere de excesivos recursos a la hora de simular. Respecto a la respuesta inmediata de los valores simulados, esto se debe a que estos datos no se encuentran filtrados. En efecto, el sistema simulado debería filtrarse Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 175 por algún algoritmo de filtro pasabajos de primer orden, por ejemplo. Se aplicará un filtraje de los datos por un filtro de primer orden pasabajos sustentándose en los siguientes razonamientos: Ø Los sistemas químicos en general se pueden identificar por sistemas de primer orden sin alejarse demasiado de la realidad. Es por esto que no se considera necesario la aplicación de un filtro de orden superior. Ø En cada celda la sal que circula a través de la misma permanece de media un tiempo estimado de 30 minutos. Este valor se estima en el parámetro TAU del programa que se muestra en la página siguiente. Con todo esto se propone una variante al último programa utilizado, dando lugar al fichero mincuadradoss.m . Este fichero es como el anterior pero incluye dicho filtraje a los resultados simulados. Por otro lado, la constante de tiempo del mismo, TAU en el algoritmo, es función del caudal que circula por la celda, es decir, ft ( k ) / beta0 en el algoritmo. El volumen de celda VK se ha tomado un valor estimativo según responsables de la sala de control de la planta UE, que la estimaron en 2.4m 3. Aplicando el algoritmo que se muestra a continuación sobre todos los datos recogidos se obtuvieron gráficas que se muestran tras el algoritmo del programa. Como se podrá observar los puntos en azul, correspondientes a valores simulados y filtrados, tienden a reaccionar de una forma más parecida al sistema real. También se comprobará en el algoritmo la existencia del término Qm término que muestra que la utilización de un valor medio para K1 α' K2 α' y U • AK α' en vista a las gráficas, es viable. Por esto se tomaran los resultados finales: K1 α' 0.038 K2 α' 332.019 U • AK α' 562.146 Tabla 10 Valores estimados del modelo para células electrolíticas donde K1 en kcal kcal kcal ; K2 en ; U·AK en 2 h·(kA) h·kA hº·C Página 176 Autor: Alberto Ojeda Pérez Mincuadradoss.m Fa=96478; cp=0.796; dens=1164; close all A=[]; B=[]; X=[]; Q=[]; Qs=[]; Qm=[]; Qmf=[]; beta0=1/100; So=[ 0.039 0.037 0.039; 278.844 372.497 344.716; 542.102 614.030 530.307]; Sm=[0.038; 332.019; 562.146]; V=2.4; t=[t2 t49 t99 tamb]; fk=[k2,k49,k99]; for c=1:3 X=[]; A=[]; B=[]; for k=1:length(i) A=[A;[fk(k,c)*i(k)^2 i(k) (t(k,4)-t(k,c))]]; B=[B;[-(beta0)*ft(k)*dens*cp*(tin(k)-t(k,c))]]; end Q=[Q,B]; Qs=[Qs,A*So(:,c)]; Qm=[Qm,A*Sm]; Qmfa1=Qm(1,c); Qmfa=[]; for k=1:length(i) TAU=60*V/ft(k)/beta0; Qmfa1=Qmfa1*exp(-1/TAU)+(1-exp(-1/TAU))*Qm(k,c); Qmfa=[Qmfa;Qmfa1]; end Qmf=[Qmf,Qmfa]; end So figure(5) plot(Q,Qs) hold on plot(Q,Qm) hold on plot([min(Q),max(Q)],[min(Qs),max(Qs)]) for c=1:3 figure(c) plot(Q(:,c),'r') hold on plot(Qs(:,c),'g') hold on plot(Qm(:,c),'k') hold on plot(Qmf(:,c),'b') end Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Celda 02 Celda 49 Celda 99 Gráfica Q(vs)Qs Página 177 Ilustración E.III-2 Gráficas de validación de solución empleando datos: 27 de febrero 2003 a 4 de marzo 2003 Para estos datos se puede comprobar como la gráfica azul que corresponde a los valores simulados y filtrados responde, como un sistema de primer orden, de una manera más natural a los cambios, asemejándose más todavía que los valores simulados sin filtrar, verde, a los valores reales, de color rojo. Los puntos en negro son los valores simulados sin filtrar recogiendo la solución única propuesta para K1 α' K2 α' y U • AK α' . La última gráfica muestra una distribución bien repartida entorno a la región correcta de valores, remarcada por una línea negra gruesa. Estos valores permiten validar los resultados obtenidos. Todo y con esto se procede a aplicar las soluciones halladas a otros valores. Página 178 Autor: Alberto Ojeda Pérez Celda 02 Celda 49 Celda 99 Gráfica Q(vs)Qs Ilustración E.III-3 Gráficas de validación de solución empleando datos: 24 horas de 20 febrero 2003 a 21 febrero 2003 En las gráficas de las células con estos datos se aprecia más fácilmente la respuesta de los valores simulados y filtrados (azul) en comparación con los valores simulados sin filtrar (verde) así como con los valores reales (rojo). Estos datos también permiten validar los resultados obtenidos. Finalmente se procede a aplicar la solución obtenida sobre los últimos datos obtenidos en planta. Hasta ahora los valores mostrados correspondían al período de invierno, por lo que a continuación se obtendrán resultados en unos datos recogidos en verano para comprobar que el sistema no es sensible a este cambio temporal. Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Celda 02 Celda 49 Celda 99 Gráfica Q(vs)Qs Página 179 Ilustración E.III-4 Gráficas de validación de solución empleando datos: 24 horas de 7 agosto 2003 a 8 agosto 2003 Página 180 Autor: Alberto Ojeda Pérez Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 181 F. Implementación de controladores Todos los programas que se citan en este apartado se pueden encontrar en el CD complementario al proyecto. Observar muchas veces se omitirá la dependencia temporal a fin de facilitar la notación y ajustarla al tamaño de página. F.I Linealización de un SNL entorno un punto de equilibrio Para este proyecto, debido a que todos los puntos de equilibrio del sistema intercambiador de calor son estables y para un sistema no lineal, SNL, “multiple input multiple output”, MIMO, de segundo orden con dos salidas y dos entradas del tipo: • X 1 (t ) = f 1 ( X (t ), U (t )) • f ( X (t ), U (t )) X 2 (t ) 2 Y ( t ) = g ( X (t ), U (t )) Ec_ F-1 se empleará la linealización por un punto de equilibrio (PE). A tal efecto, para un sistema como el anterior, el sistema linealizado entorno un PE se expresa: ( ) Y = J (g ( X ,U ) ) • X = J 1 f ( X ,U ) 1 X PE ,U PE ( ) (g ( X ,U )) * X (t ) + J 2 f ( X , U ) X PE ,U PE * X (t ) + J 2 X PE ,U PE * U (t ) Ec_ F-2 * U (t ) X PE ,U PE donde: df1 ( X ,U ) dX 1 J f ( X ,U ) = df 2 ( X ,U ) dX 1 ( ) df 1 ( X , U ) dX 2 df 2 ( X , U ) dX 2 df1 ( X ,U ) dU 1 df 2 ( X ,U ) dU 1 corresponde al jacobiano mientras que W Z PE df 1 ( X , U ) dU 2 df 2 ( X , U ) dU 2 Ec_ F-3 indica que la expresión W se evalúa para la variable Z en el PE [The Control Handbook, 1996, p.388]. Este jacobiano se puede expresar como combinación lineal de sus columnas: X J f ( X , U ) * = J1 f ( X , U ) * X + J 2 f ( X ,U ) * U U ( para ) ( ) ( ) Ec_ F-4 Página 182 Autor: Alberto Ojeda Pérez df 1 ( X , U ) dX 1 J1 f ( X ,U ) = df 2 ( X , U ) dX 1 df 1 ( X ,U ) dX 2 df 2 ( X ,U ) dX 2 Ec_ F-5 df 1 ( X , U ) dU1 J1 f ( X ,U ) = df 2 ( X , U ) dU 1 df 1 ( X ,U ) dU 2 df 2 ( X ,U ) dU 2 Ec_ F-6 ( ) ( ) Sea la primera componente del vector de entradas el caudal de la parte derecha de un intercambiador genérico: este caudal es la variable de control. Ø Linealización para intercambiadores S302/1y/2 (fase calentamiento) Sea u1 (t ) = FR (t ) y u 2 (t ) = F (t ) . Recordando las expresiones en términos de control: • X 2 (t) = • X1 (t ) = u2 ( t ) A •U (TIN , C ( t ) − X 2 ( t )) + ( X 1( t ) − X 2 (t )) V ρC • CpC • V Ec_ F-7 u1 (t ) A •U (TIN , H ( t ) − X1 (t )) + ( X 2 (t ) − X 1( t )) V ρ H • CpH • V Ec_ F-8 queda un sistema linealizado de segundo orden: A•U − u1 • V − ρ • Cp • V H H X• 1 = A•U X 2 ρC • CpC • V A•U ρH • CpH •V −F A •U − V ρ C • CpC • V ( X PE ;u ) TI N , H − X1 ) X1 V * + X2 0 PE u * 1 TI N ,C − X 2 ) u2 V X P E ;u P E ( 0 ) Ec_ F-9 1 0 X1 Y (t) = * 0 1 X 2 donde se ha omitido la dependencia temporal por cuestiones de espacio. Ø Para intercambiadores S302/3y/4 (fase enfriamiento) Sea u1 (t ) = FC ( t ) y u 2 (t ) = F (t ) . • X 2 (t ) = u1 (t ) A •U (TIN ,C (t ) − X 2 ( t )) + ( X (t ) − X 2 (t )) V ρ C • Cp C • V 1 Ec_ F-10 Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. • X 1 (t ) = Página 183 u 2 (t ) A •U (TIN , H ( t ) − X 1 ( t )) + ( X ( t ) − X 1 ( t )) V ρ H • Cp H • V 2 Ec_ F-11 En este caso el sistema linealizado queda: A •U − F • V − ρ • Cp • V H H X• 1 = A • U X 2 ρ C • Cp C • V A •U ρ H • Cp H • V −u1 A •U − V ρ C • Cp C • V X PE ;u PE 0 X1 * + X 2 (TIN , C − X 2 ) V (T − X 1 ) V 0 IN ,H u * 1 u 2 X PE ; u PE 1 0 X 1 Y (t) = * 0 1 X 2 Como se podrá comprobar en los ficheros realizados en Maple V dedicados a la linealización de los intercambiadores, IntercambHH.mws y IntercambHC.mws , una vez obtenido el sistema linealizado en espacio de estados, EE, se ha convertido a matriz de transferencia mediante la aplicación de la conocida expresión: G( s ) = C • ( s • I − A)−1 • B + D Ec_ F-13 válida para sistemas invariantes en el tiempo. F.II Ganancia K2 cadena ganancias IC calentamiento En la determinación de parámetros del modelo completo de intercambiadores de calor se determinaron sendas curvas que relacionaban el coeficiente global de transferencia de calor, U, con el caudal de agua, caso intercambiadores fase enfriamiento, y con el caudal de recirculación, caso de intercambiadores fase calentamiento. A continuación se recuperan las curvas obtenidas en Matlab y que también figuran en el Anexo, en páginas 155 y 159 respectivamente: Ec_ F Página 184 Autor: Alberto Ojeda Pérez U1( Fc ) = −0.0012 Fc2 + 6.6404 Fc + 491.3324 U 2 ( Fc ) = 0.0000 Fc + 3228.4000 Ilustración 13-1. U(vs)Fc fase enfriamiento U ( Fc) = −0.0052 FR + 6.9091FR + 289.3943 2 Ilustración 13-2. U(vs)FR fase calentamiento § K2 para intercambiadores fase calentamiento, S302/1 y/2: Para caracterizar esta ganancia se ha optado por determinar el ratio entra el caudal de de sal que entra al intercambiador por la parte fría, Fs, y el caudal de sal recirculado desde la sala de células, FR. Este ratio surge para poder estimar un caudal de recirculación a partir del caudal de sal que entra al intercambiador para ser calentada. Así se trata de obtener una relación entre la posición angular de la válvula y el caudal de recirculación que circula por ella. FR (t ) FR máx 500 = = = 0.87 Fs( t ) Fsmáx 575 Ec. 13-1 De esta manera se determina el caudal de recirculación como: FR (t ) = FR máx α α • Fs (t ) • ⇒ FR (t ) = 0.87 • Fs(t ) • Fsmáx 100 100 Ec. 13-2 Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 185 Sin embargo, cabe remarcar que esta última expresión es una aproximación para poder trabajar con un modelo Simulink y con un modelo de los datos de origen de planta. En la realidad este caudal de recirculación es indeterminado ya que no se conoce por instrumentación de planta. Además, realmente no se puede establecer una relación unívoca entre posición de válvula α y caudal que circula por ella ya que el mismo dependerá del número de bombas que “soplan” caudal. En la expresión anterior se han recogido los valores máximos de FR mediante la gráfica de la Ilustración 13-2, y de Fs observando los datos recogidos en la obtención del modelo completo. Así, la ganancia K2 se puede definir mediante este ratio como: K2 = dFR ( t ) Fs( t ) ⇒ K 2 = 0.87 • dα ( t ) 100 Ec. 13-3 donde aparece el término 100 en el denominador debido a que la posición de válvula se obtiene en porcentaje. F.III Historial de diseño de ganancia variable para intercambiadores En este apartado se muestra un resumen del estudio realizado en el intento de determinar una expresión de ganancia variable para el controlador secundario en función de parámetros de planta. Finalmente, tal y como se mostrará en la memoria, un diseño robusto de parámetros constantes para el PI que controla dichos intercambiadores se mostrará como la solución más práctica. Se recomienda atender a la nomenclatura propuesta en Ilustración 9-1 de la página 58. Ø Intercambiadores de calor fase calentamiento: De este sistema se trata de determinar la variación que experimenta la temperatura de entrada a la sala de células, TIN,S(t) respecto la variación de la variable de control, FR(t). Página 186 Autor: Alberto Ojeda Pérez Recordando la expresión de la Ec. 9-2 en página 59, eliminando la dinámica: FR (t ) • ρ1 • Cp1 • (T1, R ( t ) − T2 , R (t )) − A • U • (T2, R (t ) − T2 (t )) = 0 Ec_ F-14 expresión de la que se puede aislar el término: T2, R (t ) = FR (t ) • ρ1 • Cp1 • T1, R (t ) + A • U • T2 (t ) Ec_ F-15 FR ( t ) • ρ1 • Cp1 + A • U De la suma de la Ec. 9-1 que se recuerda a continuación, eliminando la dinámica: F ( t ) • ρ 2 • Cp 2 • (T1 (t ) − T2 (t )) − A • U • (T2 (t ) − T2, R (t )) = 0 Ec_ F-16 y la Ec_ F-14 se obtiene: F ( t ) • ρ 2 • Cp 2 • (T1 (t ) − T2 (t )) = − FR (t ) • ρ 1 • Cp1 • (T1, R (t ) − T2, R (t )) Ec_ F-17 De esta última expresión se puede aislar el término: T2 (t ) = FR (t ) • ρ1 • Cp1 • (T1, R ( t ) − T2, R (t )) + F ( t ) • ρ 2 • Cp 2 • T1 ( t ) F (t ) • ρ 2 • Cp 2 Ec_ F-18 Partiendo de la definición de ganancia y recogiendo esta última expresión: K≡ dT (t ) dY (t ) → 2 = dU ( t ) dFR (t ) ρ1 • Cp1 • (T1, R (t ) − T2, R (t )) − FR (t ) • ρ1 • Cp1 • dT2, R (t ) dFR (t ) F (t ) • ρ 2 • Cp2 Ec_ F-19 para U(t) y Y(t) las entradas y salidas del sistema. En este caso la entrada se asigna a la variable de control, FR(t), mientras que la salida se asigna a la única temperatura que interesa, la temperatura de entrada a sala de células, TIN,S(t). Finalmente, derivando el resultado de la Ec_ F-15 y sustituyendo se concluye: K= ρ 1 • Cp1 • (T1, R (t ) − T 2 (t )) ρ 1 • Cp1 • (T1, R (t ) − T 2, R (t )) − FR (t ) • A • U • F (t ) • ρ 2 • Cp 2 (FR (t ) • ρ1 • Cp1 + A • U )2 Ec_ F-20 De esta expresión se desprende que se podría caracterizar la ganancia del sistema como: K = K1 • (T1, R ( t ) − T2 , R (t )) F (t ) − K2 • (T1, R ( t ) − T2 ( t )) F ( t ) • FR (t ) para K1 , K2 constantes a determinar. Ec_ F-21 Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 187 Sin embargo, finalmente se estudió la implementación de la siguiente expresión: K = Ki • (T1, R (t ) − T2 (t )) F ( t ) • FR (t ) +γ Ec_ F-22 El razonamiento de esta reducción se basa en criterios de robustez, tratando de minimizar el número de señales que intervienen en el modelo. Para la justificación de esta simplificación se optó por un estudio del sistema linealizado. A tal efecto, en el fichero IntercambHH.mws de Maple V se realiza la linealización y la determinación de la expresión analítica de la ganancia del sistema intercambiadores S302/1y/2. Tras la linealización se recogen expresiones genéricas que toman las variables de estado en los puntos de equilibrio genéricos del sistema. Una explicación de la linealización propuesta se plantea en el Anexo F.I. en página 181. Sobre el sistema linealizado se sustituye aquella variable de estado que no se identifica con la TIN,S o temperatura de entrada de sala. Esto se debe a que la variable de estado que no se identifica con esta temperatura es una variable de salida del sistema que no interesa. La otra variable, la que sí se identifica con dicha temperatura de entrada a sala, es muy interesante, recogiéndose datos de ella continuamente. Esta ganancia obtenida y simplificada en Mapple se programa en otro fichero denominado IntercambHH_k.m de Matlab y se calculan las siguientes curvas: Ilustración F.III-1 Curvas del fichero IntercambHH.m La gráfica superior indica la variación de la ganancia (K), en ordenadas, respecto: Página 188 Autor: Alberto Ojeda Pérez K (vs) TIN,S K (vs) F S K (vs) FR para Fs el caudal de sal y FR el caudal realimentado desde sala. Se aprecia una variación significativa de la ganancia con respecto a la temperatura de entrada a la sala de células. Esta temperatura se ha escogido en esta gráfica ya que es un término que aparece en los modelos de ganancia propuestos, se recuerdan: K = K1 • (Tout, S (t ) − T2, R ( t )) F (t ) − K2 • (Tout, S (t ) − Tin, S (t )) F (t ) • FR ( t ) Ec_ F-23 ganancia obtenida del estudio analítico realizado, K = K1 • (Tout, S ( t ) − T2, R (t )) Ec_ F-24 F (t) primera de las posibles reducciones de ganancia. K = K2 • (Tout, S (t ) − Tin, S (t ) F (t ) • Fr (t ) ) Ec_ F-25 reducción de ganancia deseable. De las dos gráficas siguientes: Ilustración F.III-2 Curvas del fichero IntercambHH.m Ø La gráfica de la izquierda muestra la diferencia entre la ganancia real y la ganancia simplifica, en ordenadas, respecto el término (Tout,S -Tin,S ) Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 189 Ø La gráfica de la derecha muestra la misma diferencia, respecto el término (Tin,S -T2,R) nomenclatura según Ilustración 9-1 de la página 58. Como se puede apreciar la evolución de la ganancia respecto a estas dos diferencias es relativamente paralela. Además, de los valores de diferencia obtenidos con la ganancia completa, se podría asumir la predominancia del término (Tin, S (t ) − Tout, S ( t )) por lo que se plantea la reducción a la expresión: K = K3 • (Tout,S (t ) − Tin, S ( t )) F ( t ) • FR (t ) Ec_ F-26 +γ donde, como se puede observar y en vistas a las curvas de evolución paralela de las dos últimas gráficas, se plantea un “offset” o desviación constante γ. Ø Intercambiadores de calor fase enfriamiento: Se realiza un análisis análogo al anterior, empleando los ficheros IntercambHC.mws y IntercambHC_K.m de Maple V y Matlab respectivamente. Con esto se llega a la misma conclusión, readaptando los índices de temperatura. Ø Determinación de ganancia del controlador: U 2(t) α(t) K1 K2 FR(t) K T IN,S(t) Ilustración F.III-3. Cadena de ganancias del secundario. Para adaptar la ganancia del controlador secundario hay que tener en cuenta la cadena de ganancias mostrada en la ilustración anterior. A continuación se realizar un estudio de cada una de estas ganancias. Ø K Esta es la ganancia que hace referencia al modelo reducido de los intercambiadores. Se recuerda a continuación: Página 190 K = Ki • Autor: Alberto Ojeda Pérez (T1, R ( t ) − T2 ( t )) F (t ) • Fr (t ) o +γ Ec_ F-27 K para intercambiadores fase calentamiento, S302/1 y/2: Sean T1, R (t ) = Tout, S (t ) y T2 (t ) = Tin, S (t ) según la Ilustración 9-1. Recuperando el fichero IntercambHH.mws se puede observar que al final del mismo aparecen varias ganancias bajo la variación de Tin,S(t), Tc,o en programa, asignando valores habituales a los demás parámetros. Se procede a igualar estos valores de ganancia, correspondiente a la ganancia no reducida de los intercambiadores, con la ganancia reducida propuesta en la Ec_ F-27, con lo que se obtiene: K no reducida K3 γ -13.667 ∀ -13.667 -7.326 76080 -13.667 -0.985 76080 -13.667 Tabla 11. Valores de modelo de ganancia variable para controlador secundario siendo ∀ un valor cualquiera. De esto y para intercambiadores de la fase de calentamiento se concluye: K= 76080 • (Tout, S (t ) − Tin, S ( t )) F (t ) • FR ( t ) o Ec_ F-28 − 13.667 K para intercambiadores fase enfriamiento, S302/3 y/4: Sea T2 (t ) = TOUT , S ( t ) según la Ilustración 9-1 de la página 58. Realizando un estudio análogo al anterior se genera el fichero IntercambHC.mws en el que se puede observar que al final del mismo aparecen varias ganancias bajo la variación de TOUT,S(t), Th,o en programa, dando valores habituales a los demás parámetros. Se procede a igualar estos valores de ganancia, correspondiente a la ganancia no reducida de los intercambiadores y se concluye la expresión: Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. K= − 179400 • (T1, R ( t ) − Tout, S (t )) F ( t ) • FR ( t ) + 16.506 Página 191 Ec_ F-29 Ø K2 Atender apartado 9.2.2. Diseño del controlador secundario o esclavo en página 72 de la memoria. Ø K1 Atender apartado 9.2.2. Diseño del controlador secundario o esclavo en página 72 de la memoria. Ø Determinación ganancia del controlador, Kc: Para la determinación del la ganancia del controlador secundario se parte de un estudio recogido en la bibliografía y recopilada en el Anexo F.V. Reglas de tuning de PID (IMC tuning) [S.Skogestad 2003,p.294]. Así se plantea la ganancia del controlador como: Kc = τi 1 • K (τ c + θ ) Ec_ F-30 siendo K la ganancia del sistema a controlar. Esta ganancia, en este caso, corresponde al producto de todas las ganancias planteadas anteriormente. En el diseño del controlador en Simulink se puede distinguir la implementación de esta ganancia K, remarcada sobre la siguiente ilustración: Página 192 Autor: Alberto Ojeda Pérez Ilustración F.III-4. Modelado del controlador secundario en Simulink Este modelo se puede consultar en el fichero montaje_fallido.mdl Con este diseño en Simulink la ganancia del controlador se puede redefinir como: Kc = 1 • k0 K identificando Ec_ F-31 k0 = τi . Para el caso de los intercambiadores, tal y como se (τ c + θ ) muestra en la memoria, se opta por una τi escogida según criterios de robustez sobre el modelo de referencia, por lo que los parámetros que dan lugar a k0 toman valores: τi τc θ 40,0 s. 3,7 s. 13,0 s. en segundos, con lo que k0=2.39. Las expresiones mostradas para los caudales FR , en ilustración anterior, han sido obtenidas por regresión sobre los datos de planta recogidos para la creación de los modelos completos, en los capítulos 7 y 8. Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 193 Esta implementación se simuló sin éxito. La ganancia del controlador secundario permanecía en los valores límites situados a fin de acotar la ganancia, como un control todo o nada entre dos valores. Esto se debe a que el modelo reducido de ganancia para los intercambiadores no es válido. Los motivos son varios: 1. Se parte de un modelo muy reducido por lo que puede repercutir en la validación de las asunciones que se han tenido que asumir. 2. El estudio realizado en este apartado de Anexo contempla el sistema de controladores aisladamente, es decir, sin tener en cuenta la sala de células. Esta es una práctica habitual de diseño de controladores en sistema en cascada pero puede no resultar válido en sistemas recirculados. Este es el caso y el motivo radica en que en el modelo aparece la temperatura de salida de la sala de células, Tout,s (t). Al no contemplar la sala de células no se tiene en cuenta su efecto sobre dicha temperatura, con lo que el modelo está incompleto. El resultado final es un controlador cuya ganancia queda fijada por los límites establecidos. Según las condiciones de temperatura y de intensidad en la simulación, se pueden alcanzar estados de funcionamiento cíclicos en los intercambiadores, es decir, la señal de salida del controlador secundario deviene oscilatoria con lo que se alcanza un ciclo límite. Debido a la naturaleza estable del sistema de intercambiadores, esto no conlleva un resultado catastrófico sino únicamente un comportamiento indeseado que se traduce en una continua alternancia de apertura de las válvulas que habilitan los intercambiadores de calentamiento y de enfriamiento, respectivamente. Este problema unido a la velocidad de la dinámica de los intercambiadores, τ de 25 segundos frente a τ de 30 minutos de promedio para la sala de células, hace que dicha oscilación sea de elevada frecuencia, respecto la evolución de temperatura de la sala de células. Página 194 Autor: Alberto Ojeda Pérez F.IV Estabilidad modelo intercambiadores de calor A continuación se demuestra la estabilidad en cualquier punto de funcionamiento del sistema, justificando esta afirmación desde tres puntos de visto: 1. Desde un punto de vista empírico: en un intercambiador tiene lugar el intercambio de energía calórica entre dos fluidos. Por el primer principio de la termodinámica no se puede dar el caso que los dos fluidos se calienten, es decir, no se puede crear energía. Al ser un sistema disipativo y la entrada de energía es acotada por el flujo caliente, el sistema nunca se inestabilizará. 2. Se pueden analizar los polos de la matriz del sistema linealizado entorno a un punto de equilibrio genérico (ver Anexo F.I. Linealización de un SNL entorno un punto de equilibrio en página 181 ). Si para este punto genérico el SL es estable, el SNL será estable para todo punto ya que todos los puntos de funcionamiento son puntos de equilibrio. Esta demostración se realiza en Mapple V y se incluye en el CD complementario a este proyecto. Este estudio se encuentra en el fichero: EstabIntercamb1.mws. Del sistema de segundo orden, si se observan las raíces halladas en el fichero citado, una se muestra claramente negativa mientras que la otra no resulta evidente. Esta imagen muestra el plano por el que se mueve la raíz cuyo valor a priori no se podía asegurar que fuese negativo. Se comprueba como, para los valores de caudal en el rango de funcionamiento del sistema, la raíz, ordenadas, se mantiene negativa. Ilustración 13-3. Estabilidad intercambiadores. Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 195 Al tener dos polos con parte real negativa, se cumple la condición necesaria y suficiente para estabilidad en un sistema tiempo continuo 3. En el fichero EstabilidadIntercamb2.mws de Mapple V se realiza el estudio en el plano de fases de un sistema de segundo orden, concretamente sobre el SL equivalente. Se puede probar que para diversos valores o puntos de funcionamiento, el punto de equilibrio cambia y es estable. Esta prueba sola no sería suficiente como para garantizar estabilidad global del sistema. A continuación se demuestra una gráfica del plano de fases para un punto de funcionamiento del sistema: Ilustración 13-4. Plano fases Intercambiadores. Como se puede observar a partir del SL equivalente, el punto de funcionamiento es un nodo estable. Esto no se podría generalizar a todos los puntos de funcionamiento pero recogiendo resultados anteriores sí que se puede establecer que para todo punto de funcionamiento el SNL es estable. Este estudio de estabilidad, en sus puntos 2 y 3 se ha realizado sobre intercambiadores S302/1y/2. Se puede realizar análogamente para los S302/3/4 llegando a las mismas conclusiones. Página 196 Autor: Alberto Ojeda Pérez F.V Reglas de tuning de PID (IMC tuning) [S.Skogestad 2003,p.294] Estas reglas son aplicables a sistemas en tiempo continuo de primer o segundo orden con o sin retraso. Ganancia Kc Kc = 1 τi • K (τ c + θ ) Constante τi Constante τd τi = τ L 0 para una planta de primer orden tipo: G( s ) = K donde τL es la constante de tiempo mínima del sistema de segundo (τ L s + 1) orden del que proviene, en base a criterios de control robusto. Con esto se obtiene un controlador PI tipo serie donde τC es la constante de tiempo deseada para un sistema de primer orden: y y deseada = 1 • e−θs τc s + 1 Ec_ F-32 En el caso particular del controlador primario, se plantea un PID en base a este criterio y a la relación: 1 τd = τi 4 basada esta última en criterios de control robusto. Ec_ F-33 F.VI Efecto de una solución “feedforward” A continuación se muestran, para una misma serie de datos, como afecta la existencia o no de una estrategia de “feedforward” en los resultados obtenidos sobre el sistema controlado. Las graficas mostradas se han obtenido manipulando el fichero montajesinff.mdl, fichero idéntico al presentado en el apartado 10. Modelado en Simulink e implementación en página 85 eliminando la solución de “feedforward” [K.Astrom & T.Hägglund,1995,p.281]. Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 197 Ilustración F.VI-1. Resultados anulando bloque “feedforward”, ejecutando montajesinff.mdl Página 198 Autor: Alberto Ojeda Pérez Ilustración F.VI-2. Resultados con bl oque “feedforward”, ejecutando montajenofallos.mdl Se aprecia claramente como en la ilustración de la simulación sin “feedforward” existe un sobrepico de 3ºC de la temperatura real de la sal de salida (amarillo) respecto la temperatura de “setpoint” deseada (celeste en 85ºC) en gráfica TempSala. Especialmente interesante resulta observar también que el tiempo en el que se mantiene la temperatura de salida de la sala de célula por encima de la deseada es de, aproximadamente, 170 minutos. Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 199 Sin embargo, con una solución de “feedforward” se minimiza el valor de sobrepico hasta obtener un exceso de 0.7ºC, mientras que el tiempo en el que la temperatura de salida permanece por encima de la deseada se reduce hasta 120 minutos, aproximadamente. F.VII “Windup” y diseño “antiwindup” en PID primario El efecto de “windup” se da en sistemas de amplio rango de funcionamiento cuando algún elemento del sistema satura. Cuando esto tiene lugar se rompe el lazo “feedback” de control y el sistema queda en lazo abierto. Si en el sistema de control existe una parte integradora, el resultado es la integración de una señal de error ε =SP-PV que hace que cada vez el valor de la parte integral vaya aumentando conforme aumenta la diferencia entre PV y SP, estando PV saturada. La consecuencia de esta integración es que, cuando la señal SP varia de tal forma que la señal PV debería salir de la región de saturación, el valor acumulado debido a la parte integral es muy elevado y el sistema ha de desintegrarlo, lo que se traduce en un transitorio, ∆t, largo hasta que la señal de control toma valores adecuados y se aprecie un cambio en la señal de salida PV. Este fenómeno se conoce como efecto “windup” integral y se da en muchos sistemas en cascada [K.Astrom & T.Hägglund,1995,p.279]. Un esquema de todo lo planteado seria: ε SP + U PI”o”PID Planta PV - valor t ∆t Usaturación t Ilustración F.VII-1. Esquema conceptual de efecto “windup” integral. Página 200 Autor: Alberto Ojeda Pérez A continuación se plantea un breve análisis de la importancia de aplicar una solución antiwindup” en este caso. Para esto se simulará el sistema definitivo propuesto, eliminando la solución “antiwindup” de control. Para poder apreciar la diferencia se recomienda atender la Ilustración F.VI-2 en página 198. Ilustración F.VII-2. Comportamiento simulado sin “antiwindup” , ejecutando montajesinawu.mdl Las imágenes obtenidas pertenecen al fichero montajesinawu.mdl. Se puede comprobar como hasta el instante de tiempo 900 minutos, aproximadamente la imagen de TempSala muestra que la temperatura de salida de la sala de células (lila) es inferior a la de “setpoint”. En todo este tramo, al no existir solución “antiwindup”, la salida del controlador secundario, (lila) en imagen INTER, crece de forma continua mientras que la señal de salida de los intercambiadores (amarillo) permanece saturada en gran parte del rango. A partir del instante 900 minutos se dan unas condiciones que permiten el aumento de la temperatura de salida en sala de células de tal manera que en el instante marcado por la línea roja la temperatura de salida de la sala es idéntica a la de “setpoint”. En este instante el funcionamiento ideal debería mostrar como se cierra la válvula del circuito de calentamiento, (amarillo) en pantalla TODO Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 201 NADA y como se abre la válvula de circuito enfriamiento (lila). Sin embargo, debido a la gran diferencia entre el valor de salida del intercambiador secundario y la salida de los intercambiadores de calor, existe un período de tiempo en el que se va “desintegrando” esta diferencia de tal manera que pasan casi 300 minutos hasta que este hecho sucede (línea color celeste). A partir de ese instante comienza a apreciarse la acción de control sobre las válvulas, p.e, mirando la pantalla TODO NADA, donde se aprecia como la señal pasa de 1 (válvula Vp1 ON) a 0 (válvula Vp2 ON) según nomenclatura propuesta en página 19. Sin embargo, esta reacción ha sido tan lenta que ha devenido un estado catastrófico en el que la temperatura de salida de la sala de células ha alcanzado una cota máxima de temperatura de 133ºC con lo que las células se han comenzado a desintegrar. F.VIII Diseño PID serie mediante Lag El diseño de un controlador tipo PID se puede ajustar al siguiente esquema: ε SP + + d dt - W Κ + τd U + + 1 τi PV Ilustración F.VIII-1. PID serie en espacio temporal A continuación se demostrará que los dos esquemas propuestos a continuación son equivalentes: ε SP + - + s τd W Κ 1 s + U + 1 τi + PV primario ε SP + - + s τd Κ + W+ U + 1 1+ τi·s PVprimario Ilustración F.VIII-2. PID serie en variables de espacio de Laplace Página 202 Autor: Alberto Ojeda Pérez Efectivamente, resolviendo analíticamente el diagrama de bloques del “feedback” negativo de la parte integral de la imagen anterior se obtiene [K.Astrom&T.Hägglund,1995,p.91]: τ ·s τ ·s + 1 1 → W ( s ) = U ( s ) i → U ( s) = W ( s) i W ( s ) = U ( s )1 − τ i ·s + 1 τ i ·s + 1 τ i ·s Ec_ F-34 La expresión obtenida es la que se obtiene para el ciclo paralelo asociada a la parte integral de la primera imagen de la ilustración anterior. El interés que platea el último esquema es el de poder implementar una estrategia “antiwindup” integral fácilmente en la estructura del controlador primario. Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. Página 203 G. Estrategias de control El sistema a analizar en este proyecto se caracteriza por ser un sistema químico recirculado. La recirculación es una estrategia industrial cada vez más extendida debido a regulaciones ambientales así como debido a la necesidad de optimizar recursos y rendimientos globales. Las tradicionales técnicas de control no tienen en cuenta la interacción entre varias unidades de proceso por lo que son inadecuadas a pesar de su simplicidad. Es por esto que existen diversos métodos para tratar con sistemas realimentados. El efecto de la recirculación sobre el comportamiento dinámico del sistema ha sido y es objeto de estudio de varios autores como, p.e, Luyben o Taiwo. Varios autores proponen distintas técnicas para el control de estos sistemas aunque bajo diversas restricciones. Así algunos proponen técnicas que requieren de una caracterización muy detallada de la planta, lo que no siempre es posible. Otros proveen soluciones o estrategias bajo condicionantes a veces demasiado duras, como es el caso de Luyben que propone soluciones únicamente válidas para sistemas recirculados con ganancias mayores que dos, lo que no es muy habitual en sistemas recirculados. En la bibliografía se cita un artículo de la revista Journal of Process Control [Surya Chodavarapu & Alex Zheng, 2001, p.459] bastante interesante al respecto. Este artículo propone una guía para el diseño de controladores para sistemas recirculados. El interés recae en que no se requiere un conocimientos detallado de la planta para aplicar los resultados que propone esta guía para determinar que criterios emplear para el diseño de controladores mediante “adaptative internal mode control” (AIMC) para una planta con recirculación. Estos criterios tratan sobre la necesidad o no de utilizar el sistema recirculado junto con el sistema que se encuentra fuera de la recirculación, a la hora del diseño de controladores por AIMC. Sin embargo, este proyecto propone una estrategia de control por “gain scheduling” (GS) por lo que no se utilizará esta guía. Se trata de estudiar un sistema no lineal (SNL) mediante técnicas lineales unidas a estrategias de GS. También propone otro diseño de control bajo criterios de robustez. Página 204 Autor: Alberto Ojeda Pérez Evidentemente existen varias técnicas posibles al respecto aunque para el caso de la industria química y, más concretamente, para el caso de sistemas recirculados, la estrategia más extendida es la de GS. G.I Algunas estrategias alternativas El ámbito de estudio del control de procesos es un campo muy extenso y en continuo desarrollo. En el caso particular de este proyecto se trata de escoger una metodología adecuada para el control de un sistema estable en anillo abierto y recirculado. Tal y como se ha citado en la introducción de este capítulo de Anexo existen varias metodologías y una de las citadas ha sido la AIMC (Adaptative Internal Mode Control). Ø AIMC.Se trata de una estrategia que propone un controlador que incorpora un modelo de la planta que opera en paralelo. Es por tanto necesario disponer de un modelo del sistema para poder utilizarlo internamente en la estructura del controlador. Sea Q el controlador AIMC, sea K el controlador convencional y sea Gm el modelo de la planta G. Con estas definiciones se puede establecer la siguiente relación: K= Q 1 − GmQ Ec_ G-1 Variable manipulable: PV Controlador estándar, K SP + E AIMC controlador, Q Perturbación: D + Planta, G - OUT + + + + Modelo de planta, Gm Ilustración G.I-1. Esquema de un control AIMC - Ruido: W Control de temperatura en sala de células electrolíticas. Complejo Solvay Martorell. + E SP AIMC controlador, Q Página 205 PV - Modelo de planta, Gm E SP K PV Ilustración G.I-2. Relación entre controlador convencional y controlador AIMC Con respecto a las ilustraciones mostradas y a la ecuación propuesta cabe mención de las siguientes observaciones: Ø Si Gm=G , esto es el modelo coincide exactamente con la planta real, entonces el controlador AIMC equivale a un controlador K “open loop” estándar, véase Ilustración G.I-2. La consecuencia de esto es que si el sistema es inestable anillo abierto el sistema controlado es inestable. Ø Si sistema estable, entonces si Q es estable el conjunto se mantiene estable y este resultado es válido también para SNL. Respecto al primer punto y para el sistema objeto de este proyecto no plantea ningún problema ya que, como se demuestra en el proyecto, el sistema de intercambiadores es un sistema estable en anillo abierto así como también el sistema de la sala de células electrolíticas. La concatenación de dos sistemas estables en el mismo lazo da como resultado que el conjunto del sistema sea estable en anillo abierto. Esta estrategia es una posibilidad para la resolución de este problema aunque se ha optado por otro tipo de solución. Se desestimó este control AIMC debido al consumo de recursos que implica mantener en el sistema de control distribuido un modelo de la planta. Existen otras posibilidades como, p.e, el control óptimo, control por modelo de referencia, control adaptativo, control por redes neuronales, control difuso,…