Sistemas De Medida,Sensores,Galgas Extensométricas,Potenciometros,Sensibilidad,Ejemplos,Electròni
Anuncio

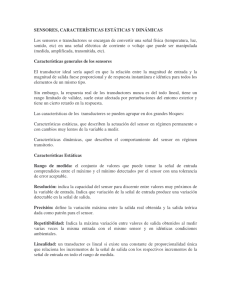
www.geocities.com/galafa En esta web encontrarás información sobre este y otros temas como Criptología, Máquinas Eléctricas, Informática, Electrónica y muchos temas te enterés Introducción a los sistemas de medida 1.1. Sistemas de medida Se define un sistema de medida como un conjunto de elementos cuya función es la asignación objetiva y empírica de un número a una cualidad o propiedad de un objeto o evento, de tal forma que la describa. Por tanto, el resultado de la medida debe ser independiente del observador (objetiva), basado en alguna experimentación (empírica), y de tal forma que exista una correspondencia entre las relaciones numéricas y las relaciones de las propiedades descritas. En la figura se muestra la estructura general de un sistema de medida y control. En ella se puede observar como el proceso de la medida incluye, además de la adquisición de la información por parte de un sensor o transductor, el procesamiento de la misma y su presentación para que nuestros sentidos puedan percibir los resultados. Por otro lado, cuando dichas medidas se realizan de manera remota se requiere la transmisión de la información. Transductor: Dispositivo que convierte un magnitud física a otra magnitud física de diferente naturaleza. Las señales pueden ser de seis tipos: mecánicas, térmicas, magnéticas, eléctricas, ópticas y químicas. Por tanto, se considerará transductor a cualquier dispositivo que convierta una señal de un tipo en otro distinto. Sin embargo, lo normal es que la señal de salida del dispositivo sea una señal eléctrica. Las ventajas de estos dispositivos electrónicos son las siguientes: - - - Debido a la estructura electrónica de la materia, cualquier variación de un parámetro no eléctrico viene acompañada de un cambio en un parámetro eléctrico. Es relativamente sencillo amplificar señales eléctricas, no tanto así otro tipo de señales. Existen muchos tipos de dispositivos, además de los amplificadores, que permiten modificar y presentar las señales eléctricas (modularlas, acondicionarlas, presentarlas, registrarlas). La transmisión de señales eléctricas es más maleable que la de señales mecánicas, hidráulicas o neumáticas. Sensor: dispositivo que, a partir de la energía del medio donde se mide, da una señal de salida que es función de la variable medida. 1.2 Tipos de Sensores: - Aporte de energía: - Moduladores: Usan una fuente auxiliar de energía para obtener la salida del sensor. - Generadores: El propio sensor genera la señal o energía. - Señal de Salida: o Analógicos: La salida varía de manera continua. o Digitales: La salida varía en forma de saltos o pasos discretos - Modo de Funcionamiento: o Deflexión: la magnitud a medir produce algún efecto físico que da lugar a algún efecto similar pero opuesto en el instrumento de medida, el cual está relacionado con alguna variable útil. En el caso del dinamómetro es la fuerza del muelle y la fuerza de la gravedad. La fuerza es proporcional a la longitud F= k.x o Comparación: Se intenta mantener nula la deflexión mediante la aplicación de un efecto bien conocido, opuesto al generado por la magnitud a medir. Hay un detector del desequilibrio y un medio para restablecerlo. El ejemplo mas común es la balanza, voy poniendo pesas hasta que esté en equilibrio. A pesar de la clasificación anterior, desde el punto de vista de la electrónica es más útil una clasificación según el parámetro variable del dispositivo utilizado: resistencia, capacidad, inductancia, generadores de tensión, corriente, etc. En la tabla 1.1 se recogen diferentes tipos de sensores ordenados según este criterio de clasificación. Magnitud Sensores Posición Distancia Desplazamiento Resistivos Potenciómetros Galgas Magnetorresistencias Capacitivos Condensador diferencial Inductivos y electromagnéticos LDVT Corrientes Foucalt Resolver Inductosyn Efecto Hall Velocidad Aceleración Vibración Temperatura Galgas + masaresorte RTD Termistores Ley Faraday LVT Efecto Hall Corrientes Foucalt LVDT + masaresorte Piezoeléctricos + masa-resorte Codificadores incrementales y absolutos Uniones P-N Fotoeléctricos Ultrasonidos Reflexión Potenc. + Tubo Bourbon Caudal Flujo Anenómetros de hilo caliente Galgas + voladizo Termistores Cond. variable + diafragma Generadores Digitales Presión Codificadores incrementales LVDT + diafragma Reluctancia variable + diafragma Termopares Piroeléctricos Piezoeléctricos Osciladores de cuarzo Codificador + tubo Bourbon L VDT + rotámetro Ley Faraday Fuerza Potencióm. + flotador Termistores LDR Galgas Humistor Cond. variable Galgas capacitivas Dieléctrico variable LVDT + flotador Corrientes Foucalt Magnetoelástico LVDT + célula de carga Vórtices SAW Fotoeléctricos Efecto Doppler Tiempo tránsito Vórtices Reflexión Absorción 1.3 Características de los sistemas de medidas Exactitud: Tiene que ver con la cualidad de un instrumento para que sus indicaciones se aproximen al verdadero valor de la variable medida. Se entiende por valor verdadero el que se obtendría haciendo uso de un instrumento ideal o perfecto. La diferencia entre ese valor verdadero y el resultado mostrado por el instrumento se denomina error absoluto. Error Absoluto = Valor medido – Valor Real. Ejemplo: Error absoluto = 1V -> 0.1.Vfe Error relativo = - Humedad Piezoeléctricos Diodo Transistor Convertidores T/I Efecto Doppler Nivel error absoluto valor verdadero Fidelidad: (precisión) caracteriza la capacidad de un instrumento de medida para dar el mismo valor de la magnitud medida, al medir varias veces en unas condiciones determinadas. Por tanto, que un instrumento no tenga una gran exactitud no quiere decir que no sean fiables sus medidas. Es más exacto Es más Fiel - Repetibilidad: La Repetibilidad se refiere al mismo hecho que la fidelidad, pero cuando las medidas se realizan en un intervalo de tiempo corto. De manera cuantitativa, se especifica como la diferencia en valor absoluto de dos resultados individuales obtenidos en las condiciones anteriores para una probabilidad dada (se suele tomar del 95%). por ejemplo que el 95% de los casos no supera a 0,1V. - Reproducibilidad: Se refiere al mismo hecho pero a largo plazo o ante condiciones diferentes de medida. - Sensibilidad o Factor de Escala: Es la pendiente de la curva de calibración, que puede ser o no constante a lo largo de la escala de medida. Así, para un sensor cuya salida esté relacionada con la entrada x mediante la ecuación y = f(x), se tiene que la sensibilidad en el punto xa, S(xa), es: S= dF ( x ) x = xa dx En los sensores interesa tener una sensibilidad alta y, si es posible, constante. En este caso, se dice que el sensor es lineal o presenta una respuesta lineal. - - Linealidad: Tiene que ver con el grado de coincidencia entre la curva de calibración y una línea recta determinada. (es cuando la sensibilidad es cte). Error de carga: Tiene que ver con las perturbaciones sobre la variable a medir durante el proceso de medida. Esto es, todo sensor perturba, en mayor o menor medida, la variable a medir y, por tanto, la magnitud medida estará en parte alterada debido a la presencia de éste. - Impedancia de entrada de un sensor: o Variable esfuerzo (X1): Se mide entre 2 puntos y la impedancia debe ser infinita. Ejm tensión eléctrica o Variable Flujo X2 : Sólo se mide en un punto y la impedancia del instrumento debe ser 0. ejem Corriente eléctrica. Impedancia del Sensor: Z ( s) = X1 X2 2 Sensores Resistivos: 2.1 El potenciómetro: sensor resistivo de dos terminales en el que uno es móvil. lL A l = resistividad L = longitud A = area(seccion trasnversal) l R = ( L − x) A R0 = Si calculamos la fracción de longitud nos queda: x L R = R0 (1 − α ) α= 2.2 Galgas extensométricas: R = lL A #Derivamos y aplicamos logaritmos: dR dl dL dA = + − l R L A # Por la ley de Hooke tenemos: σ= F = Kε A ε = micodeformacion = dl l K = modulo de Young Si tiro de la galga por F ésta se encoge y se alarga dt dL = −µ t L µ = Coef de Poisson Sección transversal circular: A= π t2 4 (π r 2 ) = LnA = Ln π 4 πd 2 4 + Ln t 2 dA dt dL =2 = −2 µ A t L Por el caso de los metales, por su efecto piezoresistivo dρ ρ donde C = Cte de Bridguen =C dv v Para un conductor: V = AxL dV dA dL = V A L (1 − 2 µ ) dL L dR dL = [C (1 − 2 µ ) + (1 + 2 µ )] = Kε R L K = [C (1 − 2 µ ) + (1 + 2 µ )] K = factor de sensibilidad Para cambios pequeños -> ∆R = kε R0 R − R0 = kε R0 R = R0 (1 + kε ) R = R0 (1 + x ) Los próximos capítulos los encontrarás en: www.geocities.com/galafa