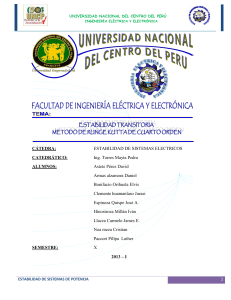
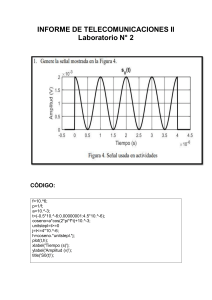
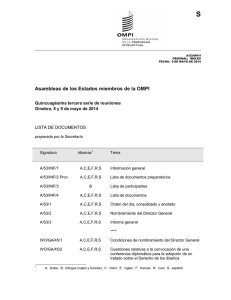
Movimiento en Dos Dimensiones con Resistencia del Aire Ruiz Atanacio Nihel 10 de junio de 2019 Resumen En este apartado analizaremos por un método numérico las variables de un proyectil como ser la posición, velocidad y energías en un plano, es decir, en las variables ’x’ y ’y’ en cada instante del tiempo, ya se había visto este problema en muchos casos, pero este nos dará mas precisión por que tomaremos en cuenta la resistencia del aire, la forma aerodinámica del proyectil y la masa del mismo; lo que significa que los resultados serán muy diferentes al del caso ideal. Para el análisis cuantitativo se recurre a un método muy conocido Runge Kutta de 4to orden y para simplificar el problema utilizaremos el MATLAB. Estos datos a mostrar son bastante precisos porque se aproxima al caso real, esto por las variables que no se consideraba en el caso ideal. El código del programa esta en la sección de los anexos listos para ser ejecutados en MATLAB. Palabras Claves: Parabólico, Proyectil, Resistencia del aire, Forma aerodinámica y Runge Kutta. 1. Introducción Es este una aproximación del movimiento de un proyectil considerando la resistencia del fluido en el que un sólido esta sumergido en el, dicho de otra manera la resistencia del aire que se opone al movimiento, se ve muchos fenómenos con esta naturaleza por ej: Un motociclista que realiza sus pruebas para desplazarse de un punto a otro. Figura 1: trayectoria parabólica Pues en este ejemplo tan simple se puede ver con bastante claridad como el motociclista adquiere diferente velocidades en cada punto de la trayectoria, bien se sabe que la velocidad es nula cuando alcanza el punto máximo en altura, este problema podrá resolverse aplicando las ecuaciones de movimiento parabólico pero el problema es que tales ecuaciones son para idealizar el fenómeno físico. Entonces tenemos que ajustar o aproximar nuestro problema a un caso mas real, 1 es decir, considerando la resistencia del aire la forma aerodinámica y la masa del cuerpo. En el caso ideal considera al cuerpo como un masa puntual lo quiere decir que no toma en cuenta la forma aeordinámica o que el diámetro del mismo tiende a cero, pues este problema es valido para entender la trayectoria del cuerpo. Ahora trataremos de ver este problema de diferente manera, incluiremos las variables que afectan al cuerpo cuando esta en movimiento, este ejemplo nos ayudara a entenderlo mejor. Figura 2: Mov. parabólico Ideal y Real La resistencia es un efecto del fluido, este puede adecuarse dependiendo del cuerpo que realizara el movimiento, entonces podemos ajustarlo a una resistencia lineal o cuadrática, este problema se había discutido ya desde los tiempos de Aristoteles y Galileo. Para resolver este problema aplicaremos el método numérico de Runge Kutta de 4to orden, realizar esto analáticamente tomará mucho tiempo entonces recurriremos a un software que realice este problema, es decir, que el fenómeno físico se traduzca a un lenguaje ejecutable por el software ’El MATLAB’. 2. Método: El Método a aplicar es Runge Kutta de 4to orden. f = f (x, y) dy = f (x, y) dx k1 = f (x, y) (1) (2) (3) k2 = f (x + h/2, y + h ∗ k1/2) (4) k3 = f (x + h/2, y + h ∗ k2/2) (5) k4 = f (x + h, y + h ∗ k3) (6) k1 + 2 ∗ k2 + 2 ∗ k3 + k4 (7) 6 Entonces aplicamos las ecuaciones de movimiento parabólico en 2D (dos dimensiones). yi+1 = yi + h ∗ m∗ dvy M ∗m = −G ∗ − f (v) ∗ vy dt (R + y)2 (8) dvx = −f (v) ∗ vx dt (9) m∗ 2 Donde f (v) es la resistencia que se opone al movimiento, esta puede ser lineal o cuadrática dependiendo de la relación entre las mismas. fcuad flin > 10, entonces consideramos fcuad ; si fuera el caso contrario entonces consideramos flin . La única variable quien definirá que tipo de resistencia es el diámetro de la esfera. Por tanto las ec. 8 y 9 se modelan con las ec 1 y 2, entonces puede verse que se ajusta muy bien a Runge Kutta. Y finalmente sera el MATLAB quien ejecute este trabajo, dándole un lenguaje adecuado. 3. Resultados Los resultados tienen los siguientes datos vo = 120[m = s], θ = 57o . (a) Diametro constante 0.1m (b) Masa Constante 7kg Figura 3: Energias para un caso ideal 3 (a) Energias para un caso real, to- (b) Datos para cada instante del tiempo, camando en cuenta las variables que da columna representa a un tipo de variafectan a un cuerpo en movimiento ble(tiempo, posición, Altura, ve- locidad x, velocidad y, energía Cinetica, Energía Potencial y Energía total) 4. Discusión y Conclusión: Este en un problema que se habá discutido por mucho an os desde los tiempos de galileo, cuando observo que un cuerpo con mayor peso caía a la superficie mucho mas rápido que otro con menor peso. También observo que influá la forma del cuerpo, esta claro por la simulación en la parte de los resultados como afecta el peso y la forma aerodinámica de material; podemos concluir que existe una gran diferencia con el caso ideal y la resistencia del fluido donde el cuerpo esta sumergido (aire) no es despreciable. 5. Referencia Bibliográfica: 1. Classical Mechanics John R.Taylor. 6. Anexos: Programa Ejecutable MATLAB. Primer archivo .m ejecutable, función de datos de entrada y salida (loop para Runge Kutta). %Resolucion de ecuaciones diferenciales por el Metodo de Runge kutta function [t,x,y,vx,vy,v,k,U,E]=rkparab(fx,fy,t0,tf,x0,y0,v0,rou,h,M,m,G,R) %variables iniciales de entrada n=(tf-t0)/h; t=t0:h:tf; vy(1)=v0*sind(rou); y(1)=y0; vx(1)=v0*cosd(rou); x(1)=x0; v(1)=sqrt((vx(1)).^2+(vy(1)).^2); k(1)=0.5*m*(v(1))^.2; U(1)=m*G*M*m/(R+y(1)).^2*y(1); 4 E(1)=k(1)+U(1); %loop para la ec dif. for i=1:n %funciones varibles de RK1, RK2, RK3 y RK4 kx1=h*fx(t(i),x(i),y(i),vx(i),vy(i)); ky1=h*fy(t(i),x(i),y(i),vx(i),vy(i)); kx2=h*fx(t(i)+h/2,x(i)+h/2,y(i)+h/2,vx(i)+h*kx1/2,vy(i)+h*ky1/2); ky2=h*fy(t(i)+h/2,x(i)+h/2,y(i)+h/2,vx(i)+h*kx1/2,vy(i)+h*ky1/2); kx3=h*fx(t(i)+h/2,x(i)+h/2,y(i)+h/2,vx(i)+h*kx2/2,vy(i)+h*ky2/2); ky3=h*fy(t(i)+h/2,x(i)+h/2,y(i)+h/2,vx(i)+h*kx2/2,vy(i)+h*ky2/2); kx4=h*fx(t(i)+h,x(i)+h,y(i)+h,vx(i)+h*kx3,vy(i)+h*ky3); ky4=h*fy(t(i)+h,x(i)+h,y(i)+h,vx(i)+h*kx3,vy(i)+h*ky3); % x, y, vx, vy, k, U y E varibles de salida vx(i+1)=vx(i)+(kx1+2*(kx2+kx3)+kx4)/6; x(i+1)=x(i)+h*vx(i); vy(i+1)=vy(i)+(ky1+2*(ky2+ky3)+ky4)/6; y(i+1)=y(i)+h*vy(i); v(i+1)=sqrt((vx(i+1)).^2+(vy(i+1).^2)); k(i+1)=0.5*m*v(i+1).^2; U(i+1)=m*G*M*m/(R+y(i+1)).^2*y(i+1); E(i+1)=k(i+1)+U(i+1); %grafica para y=y(t) %axis([0 inf 0 inf]) %hold on %plot(t(i),y(i),’*’) %pause(0.1) end end Segundo Archivo .m Ecuaciones diferenciales para un proyectil y datos de entrada. %problema de RK clear all clc %close all D=input(’Diametro del proyectil: ’); m=input(’Masa del proyectil: ’); t0=input(’Ingrese Tiempo inicial: ’); tf=input(’Ingrese Tiempo final: ’); h=input(’Ingrese Tama\~no de paso: ’); v0=input(’Ingrese Velocidad inicial del proyectil: ’); 5 rou=input(’Ingrese Angulo de disparo: ’); %constantes que dependen medio en STP(Condiciones normalizadas de presion y temperatur beta=1.6e-4;%N-s/m^2 gamma=0.25;%N-s^2/m^4 %Constantes gravitacional y radio-masa de la tierra R=6371000; G=6.674e-11; M=5.972e24; %valores iniciales de la posicion x0=0; y0=0; fcuad=gamma*D.^2*v0; flin=beta*D*v0; if (fcuad/flin > 10) %fcuad/flin > 10 considera el caso cuadratico a=2; fx=@(t,x,y,vx,vy) -gamma*D.^2*(vx.^2+vy.^2).^((a-1)/2)*vx/m; fy=@(t,x,y,vx,vy) -G*M/(R+y).^2-gamma*D.^2*(vx.^2+vy.^2).^((a-1)/2)*vy/m; [t,x,y,vx,vy,v,k,U,E]=rkparab(fx,fy,t0,tf,x0,y0,v0,rou,h,M,m,G,R); else %fcuad/flin < 10 considera el caso lineal a=1; fx=@(t,x,y,vx,vy) -beta*D*(vx.^2+vy.^2).^((a-1)/2)*vx; fy=@(t,x,y,vx,vy) -G*M/(R+y).^2-beta*D*(vx.^2+vy.^2).^((a-1)/2)*vy; [t,x,y,vx,vy,v,k,U,E]=rkparab(fx,fy,t0,tf,x0,y0,v0,rou,h,M,m,G,R); end figure; subplot(2,3,1) plot(t,x) axis([0 inf 0 inf]) title ’Runge kutta x=x(t)’ grid on grid minor xlabel ’t’ ylabel ’x’ subplot(2,3,2) plot(t,y) axis([0 inf 0 inf]) title ’Runge kutta y=y(t)’ grid on grid minor xlabel ’t’ ylabel ’y’ subplot(2,3,3) 6 plot(t,vx) axis([0 inf 0 inf]) title ’Runge kutta vx=vx(t)’ grid on grid minor xlabel ’t[2]’ ylabel ’vx[m/s]’ subplot(2,3,4) plot(t,vy) axis([0 inf 0 inf]) title ’Runge kutta vy=vy(t)’ grid on grid minor xlabel ’t’ ylabel ’vy[m/s]’ subplot(2,3,5) plot(x,y) axis([0 inf 0 inf]) title ’Runge kutta y=y(x)’ grid on legend(’Mov Parabolico’) grid minor xlabel ’x[m]’ylabel ’y[m]’ figure; plot(x,y) axis([0 inf 0 inf]) title ’Runge kutta y=y(x)’ grid on grid minor xlabel ’x[m]’ ylabel ’y[m]’ legend (’Caso Ideal’,’Diametro 0.08 m’,’Diametro 0.12 m’,’Diametro 0.18 m’) plot(x,k,x,U,x,E) axis([0 inf 0 inf]) title ’Runge kutta y=y(x)’ grid on grid minor xlabel ’x[m]’ ylabel ’Energia[J]’ %legend (’Energia Cinetica’,’Energia Potencial ’,’Energia total’) %tabla datos de t, x, y, vx, vy, k, U y E. %estos datos puede ver en worspace, cada coluumna pertenece a cada tipo de variable z=t’; z(:,2)=x; z(:,3)=y; 7 z(:,4)=vx; z(:,5)=vy; z(:,6)=k; z(:,7)=U; z(:,8)=E; f (v) = flin + fcuad + ... (10) flin = b ∗ v = β ∗ D ∗ v fcuad = c ∗ v 2 = γ ∗ D2 ∗ v 2 Beta y Gamma dependen de la naturaleza del medio en condiciones estándar, es decir, T = 20o C y P = 1atm. D es el diámetro de la esfera. β = 1,6 ∗ 10−4 [ γ = 0,25[ 8 N ∗s ] m2 N ∗ s2 ] m4