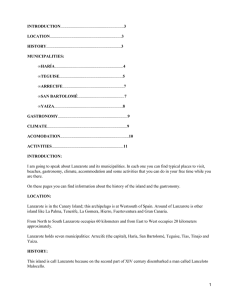
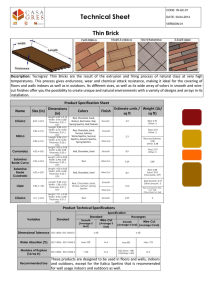
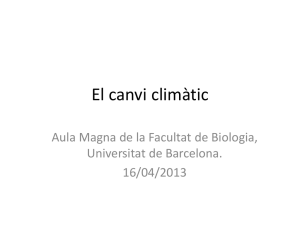
Design and initial testing of a piezoelectric sensor to quantify aeolian sand transport Raygosa-Barahona, R.a , Ruı́z-Martı́nez, G.a,∗, Mariño-Tapia, I.a , Heyser-Ojeda, E.a a Departamento de Recursos del Mar, Centro de Investigación y de Estudios Avanzados del IPN, Mérida Yucatán, México, 97310. Abstract This paper describes a sensor for measuring the mass flux of aeolian sand transport based on a low-cost piezo-electric transducer. The device is able to measure time series of aeolian sand transport. Maximum fluxes of 27 mg per second can be achieved. The design includes a sand trap, an electronic amplifier circuit and an embedded system for data collection. A field test was performed, where the basis for signal interpretation and the corresponding measurements of aeolian sand transport are presented. The sensor successfully measures fluxes driven by sea breezes of 10 m s−1 , showing the importance of this process for dune-building in the region. Keywords: aeolian sediment transport, impact sensor, piezoelectric sensor, field instrumentation, mass sediment flux 1. Introduction 5 10 15 20 25 The quantification of aeolian sediment transport is necessary to understand the patterns of erosion, accretion and other morphodynamic phenomena (i.e. bedform development) forced by wind action on beaches, agriculture soils and deserts. Aeolian sediment transport occurs when the wind blows over a sand surface or soil and its particles are moved by the resulting shear stress. Particles can be lifted and transported momentarily in the air (saltating or bouncing), or can be transported by rolling, or sliding (reptating) in the layer of sand close to the bed. In this study the aeolian transport measured is produced by all the particles that move over the surface of the sand by rolling, reptating (sliding), or saltating (bouncing). The quantification of aeolian transport has important implications for the development of coastal dunes, which are natural elements that influence the stability of the coast (Hesp, 2011). In these environments, aeolian sediment transport is influenced by variables such as the magnitude and direction of the wind, topography of the beach where the wind is acting, dune vegetation, variability in surface moisture and sediment textural characteristics, including sorting, skewness and kurtosis. The combination of these factors changes with time and results in considerable spatial and ∗ Corresponding author Email address: gruizm@cinvestav.mx (Ruı́z-Martı́nez, G.) Preprint submitted to Journal of Aeolian Research temporal variability of aeolian sand transport in coastal environments. 30 35 40 45 50 55 Aeolian sand scientists have implemented different methods to measure sediment transport. One of the methods used to quantify aeolian transport is sand traps which capture the moving sand grains in containers (Bagnold, 1954; Horikawa & Shen, 1960; Leatherman, 1978; Wilson & Cooke, 1980; Fryrear, 1986; Arens & van der Lee, 1995; Jackson, 1996; Nickling & McKenna Neuman, 1997; Sherman et al., 2014). However, the high frequency variability of aeolian transport needs to be resolved and for this reason, electronic instruments have been developed to record data continuously at sampling rates of 1 Hz or higher (Sherman et al., 1998; van der Wal, 1998; Baas & Sherman, 2006). Aeolian transport instruments include acoustic, piezoelectric, and photo electronic sensors, electronic sand traps (weight recorders) and a combination of the above (Namikas, 2002; Barchyn & Hugenholtz, 2010; Ellis et al., 2012). The acoustic sensors record the sound produced when grains of sand impact a membrane which works as a diaphragm and vibrates, generating an electronic signal from which it infers the number of impacts that are produced by the moving sand grains (Spaan & van den Abeele, 1991; Ellis et al., 2009; Yurk & Hazle, 2013; Poortinga et al., August 27, 2016 60 65 70 75 80 85 90 95 100 2015). The piezoelectric sensors detect the impacts of the grains using a highly sensitive ceramic sensor that generates small electrical pulses which are proportional to the mass of the sediments that are carried by the wind (Baas, 2004; Udo et al., 2008; Udo, 2009; Swann & Sherman, 2013). The photo electronic sensors detect the grains of sand as they cross a laser beam, interrupting the signal. The characteristics of said interruption (variation of the laser wave) provide information on the size and number of particles passing the sensor (Jackson & McCloskey, 1997; Mikami et al., 2005; Redmond & Dial, 2010; Hugenholtz & Barchyn, 2011; Barchyn et al., 2014). Bauer & Namikas (1998) presented sand traps based on an electro-mechanical instrument which automatically derived the total mass of the sediments that were caught in the traps. Schönfeldt (2012) implemented an electronic device which uses acoustic sensors and a digital web camera to measure the mass of sediments that are moved by the wind on a beach. As with any other type of sensor, sand transport sensors should be calibrated using a previously calibrated instrument, nevertheless there is no consensus amongst aeolian transport researchers as to which sensor is optimal for quantifying aeolian mass transport (Barchyn & Hugenholtz, 2010; Sherman et al., 2011); most of the calibrations are based on acoustic or piezoelectric methods. Regardless of which method is used, there is still a need for calibration. The goal of this study is to present the development of a piezoelectric sensor to measure the rate of sand mass transport at low costs with reasonable accuracy. The complete electronic system amounts to approximately $50 USD, which includes circuit boards, resistors, diodes, microprocessors, and a piezo-electric sensor. This could allow the sensor to be massively deployed in networks. The purpose of using a piezoelectric device is that it can provide a direct measurement of the force exerted by the sand grains. The sensor has a resolution of 2.5 x 10-4 g, when calibrated in the laboratory with a high precision electronic weighing scale. The article is organized as follows: section two presents the methodology including the calculation of mass, the calibration procedure and a case study in the field. Section three presents the results, and four and five present the discussions and conclusions. when subjected to a force. The amount of charge produced can be represented in a simplified form as q = K1 F where q is the electrical charge, K1 is a constant which depends on the physical characteristics and dimensions of the material, and F is the acting force. Because piezoelectric materials are also capacitors, they must follow the capacitor equation: Z q 1 t idt = (2) V= C 0 C 105 dq , also called the electrical current in where i = dt amperes, which can be approximated with the time (t) derivative of charge (q); V is the voltage and C the capacitance in Farads. Details on the principles of operation and the electronics amplifier of the sensor are presented in Appendix 1. 2.1. Mass Computation According to equation A.2, (Appendix A.1) the signal obtained by the combined embedded-piezoelectric system is related to the momentum of the mass of sands grains impacting the sensor. Assuming that the sand grains are spherical and that the d50 parameter can represent the characteristic size (and therefore the mass) of a sand sample, then we can assume the same fall velocity for all grains. This assumption results in the next equation: Z m = Kc dmdt (3) 110 115 where m is the total mass, Kc is a calibration constant which needs to be found, and t stands for the time. As will be shown in the next section, experimental tests suggest that it is enough to calculate only one value of Kc since there is no significant difference between a Kc calculated for the D5 0 and values for individual size fractions. 2.2. Sampling rate 120 2. Methodology The piezoelectric effect refers to the capability of certain materials to produce an amount of electric charge (1) 125 2 A heuristic procedure showed that a 10 kHz sampling rate provides a smooth measure of the signal produced by a grain of sand of approximately 0.5 mm, which free falls from at height of 10 cm (Figure 1). Subsequent tests were carried out using sand samples comprising a range of grain sizes showing that the sampling rates also work for smaller and larger grains. The sampled signal is integrated to produce a measure of the 130 mass. Two versions of the prototype were developed: a standalone version for field deployment, which saves the cumulative data over a 10 second time interval and a desktop version for calibrating purposes. The desktop version sends the accumulated data every 1.5 milliseconds through a serial port. The supplied data is received by a computer running Matlab. 160 165 170 175 The calibration of the piezoelectric was performed on a vertical sand fall flume. The devices consist of the following elements from top to bottom (Figure 2): (1) a funnel with a small orifice at the bottom which acts as a dispenser, (2) a cylindrical flume tube made of acrylic with a diameter of 76.2 mm, (3) the sensor mounted horizontally with the center aligned with the sand grains stream, (4) a high precision electronic weighing scale to collect the grains and obtain the mass. The grains were left to free fall into the funnel by hand. The flow rates could be controlled by adjusting the size of the orifice at the bottom of the funnel. Readings from both the sensor and the scale were logged to compare the relationship between both measures. Taking a sample of sand grains from the sieved D5 0 fraction, we throw sand into the funnel. In the bottom the electronic weighing scale obtains the accumulated mass of the sample. Figure 1: The amplified signal produced by a 0.5 mm sand grain in free fall. Note that we could consider a 200 ms interval in which the signal vanishes at a constant rate. 135 140 145 150 155 2.3. Calibration process Using the Basset Boussinesq Oseen (B.B.O.) equation to solve acceleration (see Appendix B) it is possible to compute the fall velocity of a spherical particle under the influence of gravity as it falls through a fluid (Graf, 1984). Baas (2004) presented a correction of the B.B.O. equation as a function of grain diameter assuming that all grains follow a vertical trajectory in the flux, neglecting the inter-grain effects. Figure A.4 in Appendix C shows the effects of this correction, which shows that the final velocity of a grain falling in the flume, after a critical fall height of 0.5 cm is a function of grain size alone. This was done under the assumption that the mass of a sand grain is a function of its diameter, neglecting variation in other physical characteristics such as density, chemical composition or porosity of the grain. During the tests carried out in this study the previous assumption was valid. After recovering the sand sample from the trap, a calibration process is needed in order to overcome the differences in the sediment composition and properties. A simple procedure was followed to calibrate the piezoelectric sensor by sieving the sand to obtain the D50 value which describes the diameter of the sand grains that form the sediment sample. Figure 2: The test device used to estimate the calibration constant Kc . 180 185 3 Figure 3 shows the linear relationship between the mass obtained with the scale and the response of the piezoelectric sensor. Test C1 was performed with sieved sand released from a height of 25 cm, in test C2, the sand was released from 50 cm, while in test C3 the height was increased to 60 cm. There were no significant differences in the response of the sensor, which is in accordance with the results of Baas (2004). Test C4 was performed with a sample of silt released from a height of 50 cm. As we expected the counts were reduced but the linear relationship was maintained, reinforcing the idea that a site specific calibration is needed. Tests C5, C6, C7, and C8 were carried out 190 195 with samples of unsieved sand, which included the silt of test C4. Comparing the results from C1, C2, C3 (sieved sand) and C5, C6, C7, C8 (unsieved sand) we can assure that the mass of the sample of sand grains can be approximated considering their representative D50 calibration curve. As depicted in Table 1, the correlation coefficient, R2 , was approximately 0.99 in all cases. 210 the sensor. Figure 5 shows a diagram of the sand trap system. Figure 4: Semilog cumulative probability curve of the sand sample used in the calibration processes (Test C1, C2 and C3). The main values are: D50 = 0.389 mm (1.362 φ-units), moderately well sorted, coarsely skewed, and mesokurtic. Figure 3: Comparison between the measurements obtained from the sensor and the total mass obtained by direct mass measurement. Table 1: Comparative between different tests, note that in the worst case (Test C4) the linear relation was maintained and the correlation was approximately 0.998. Test C1 Test C2 Test C3 Test C4 Test C5 Test C6 Test C7 Test C8 200 Sample Sieved sand (D50 =0.389 mm) Sieved sand (D50 =0.389 mm) Sieved sand (D50 =0.389 mm) Silts (D50 < 0.062 mm) Unsieved sand Unsieved sand Unsieved sand Unsieved sand Falling height (cm) 25 50 60 50 25 25 25 25 Counts 234700 211870 229960 59050 160520 168200 150060 162460 R2 0.998128 0.99989 0.999928 0.998108 0.999988 0.999964 0.999991 0.999969 Figure 5: Diagram of the sand trap used (the design was based on Swann & Sherman (2013)). Figure 4 presents the cumulative probability curve of the sand sample used in the calibration processes where the range of sediment sizes can be seen. 3. Results 215 3.1. Field test 205 Following Swann & Sherman (2013), the piezoelectric sensor was installed inside a buried sand trap below a funnel in order to measure time series of aeolian sand transport in the field. The sand trapped by the system was retained to validate the mass estimated by 220 4 The funnel-sensor system was installed inside a polyethylene container to protect the batteries and the electronics. The trap was deployed for three days on the beach face close to a vegetated dune in Telchac, Yucatán, Mexico (20.936N, 89.30W), as shown in Figure 6. This region is subject to erosion problems and the development of dune systems is crucial for the protection of the coast. A weather station (Davis 6152 Wireless Vantage Pro2 Weather Station) is located 150 m onshore from the sand trap, where an anemometer is installed at a height of 10 m from the ground. The vertical sand fall ’flume’ was aligned perpendicular 225 to the NE, which is the dominant wind direction in the region (Ruiz et al., 2016). Although, since it was leveled to the ground, sand from any direction could potentially fall into it. 4. Discussion 245 250 255 Figure 6: Geographical location of Telchac (image from Google Earth). 260 230 Figure 7 shows a picture of the systems installed on the beach. The sand trap (white container) includes a vertical sand fall ’flume’ and the funnel-sensor system (Figure 5). The vertical sand fall ’flume’ is the only aperture where sand can enter the trap. 265 270 275 Figure 7: Sand trap deployed in Telchac, Yucatn, Mexico. a) Trap being installed and buried in the sand, b) final view of the chimney at ground level. 235 240 Figure 8 shows the behavior of the mass transport of sand for the three days of the field test. Increased aeolian sand transport tends to occur preferentially between 16:00 and 20:00 with peaks coinciding with the maximum wind velocity which was from the NE-ENE quadrant. This behavior of the wind is typical for sea breezes which predominate in the region (Enriquez et al., 2010). Wind velocities above 7 m s−1 are necessary to accumulate sand in the trap. 280 285 In this paper, we have considered the assumptions that the sand grains are spherical, we have also assumed that the fall velocity calculated with the D50 diameter is adequate to characterize the whole sample, which might not be entirely true because the terminal fall velocity depends on the grain size. Nevertheless, tests using an unsieved sample showed the same linear response as for a sieved sample with only D50 sizes. We also show that sand grains with a smaller D50 produce a lower response (Figure 3), however the relationship is still linear. To overcome the variability imposed by the sand grain variations (variations in the D50 ) calibration needs to be performed wherever the sensor is deployed. The sensor essentially differs from the one presented by Sherman et al. (2011) in terms of the methodology used to process the signal provided by the sensor. The signal is processed (modified in size and shape) and then sampled, while in Sherman et al. (2011) the signal is sampled without any modification of its shape. The sensor presented does not amplify the negative part of the oscillations produced by the impacts, unlike other existing sensors (e.g. Swann & Sherman (2013)). This is due to the use of an amplifier with a single voltage source and not two sources as commonly used in operational amplifiers. To reduce the effect of noise, we also remove signals below 200 mV and apply an analog low pass filter prior to feeding the signal into the analog-to-digital converter, making the signal more robust. In other sensors ((Swann & Sherman, 2013; sensit, 2013)) the signals are processed digitally, requiring a large processor, which is not always ideal for transportable embedded systems. Also the interpretation of the calculation of the mass is obtained based on the momentum, which is linear with respect to the mass and velocity, presenting an important advantage over using energy (sensit, 2013) which is quadratic in speed. The sensor was deployed in a sand trap (Swann & Sherman, 2013); inside the trap it was assumed that there was no direct effect of the wind, and the velocity used to calculate the momentum is only related to the fall velocity (sediment size). From Figure 3, we can obtain the resolution of the sensor which is 2.5 x 10-4 gr/count. As the number of counts is updated with a frequency of 10 kHz, we can read a sand flux at a maximum rate of 27 mg s−1 . 5. Conclusions 290 5 A piezoelectric sensor for the estimation of aeolian transport has been presented, which includes an elec- Figure 8: Graph of winds recorded in Telchac and the sediment fluxes. Panel a) shows the wind direction (stars), panel b) presents the relationship between the sediment fluxes measured by the sensor and the wind speed (circles). Grey bars highlight the peaks in sediment flux, which are identified during the afternoon when the breezes from ENE and NE occur. 295 300 305 tronic circuit to amplify and condition the signal from the sensor. The complete system includes an embedded acquisition and data processing system including an 8bit ADC with a sampling frequency of 10 mHz and a resolution of 2.5 x 10-4 g. The sensor showed a linear relationship between the number of counts and the mass of the samples. The system can be fed by both, batteries or small solar panels. A case study is shown where aeolian sand transport was measured at a beach, showing the importance of NE winds in aeolian transport for dune building. The sensor is economical ( $50 USD), which makes it attractive for integration into large sensor networks for more complex studies. Appendix A. Appendix A.1. Principles of Operation of the Piezoelectric Sensor 315 Figure A.1 shows a simplified electrical diagram of the sensor. In this figure, R1 is the resistance between the piezoelectric element plates, C1 is the intrinsic capacitance device and F1 is the acting force. 6. Acknowledges Figure A.1: A simplified diagram for the piezoelectric device. 310 The authors thank to Dr. David Valds Lozano for sharing the wind record data for Telchac. Our sincere thanks to all the reviewers for their comments and suggestions, which helped to improve and enrich this manuscript. Thanks to Gemma Franklin for reviewing the English grammar. 320 6 Once the acting force has vanished, the resultant charge generates a voltage which decays at a logarithmic rate; however there is a time interval (T) in which we could consider a linear rate of discharge, as shown in Figure A.2. 350 355 Amplifier. The Operational Amplifier U3A provides a first amplification stage for the signal coming from the piezoelectric element. The output signal from the amplifier U3A is passed through a low-pass filter which consists of a capacitor (C1) and a resistor (R3), U3B is a second amplifier which is split into the rectifiers D1 and D2. The output signal from D1 decays at a rate determined by the capacitor C3 and the resistor R4. The output signal from D2 is used to trigger the sand grain impact counter. Figure A.2: A simplified diagram for the piezoelectric device. Using that consideration we could approximate the acting force over the piezoelectric as F = K2 T 360 (A.1) where K2 , is a proportionality constant and T is the time interval in which the signal decays to a predetermined voltage level. Taking the integral of F over the time interval T, and using equations (1), (2) and (A.1) results in the moment equation: 365 370 dm v = K Z T Vdt (A.2) 0 325 330 where K = K2 /C, a constant of proportionality, V is voltage, and v the velocity of the particle of mass dm, (in our case the mass of a sand grain). If in equation (A.2), we obtain with any other method information about v, then we could find the value of dm or at least approximate its behavior. This is fairly simple in our system since v is the fall velocity of the sand grains in the trap. 375 380 Appendix A.2. Sensor Amplifier and Signal Conditioning 335 340 345 Prior to any digital processing procedure, the signal supplied by any sensor should be treated or conditioned according to the measuring devices that will receive the signal. For this purpose we developed the electronic system shown in Figure A.3. The sensor amplifier and signal conditioning are composed of a piezoelectric disk Kepo KP2310 with a diameter of 23 mm and a 4 kHz resonant frequency, a microcontroller Atmel ATmega328, resistors and diodes. The amplifier circuit is depicted in Figure A.3, where every component is labeled, including a letter for the type of component, and a number of the part to clarify the electronic diagram: ”CONN” is used for connectors, ”R” for resistors, ”D” for diodes, ”C” for capacitors, ”U” for the Integrated Circuit and ”OPAMP” for a dual Operational 385 390 395 Appendix A.3. Embedded System for Mass Computation and Signal Processing Devices used for monitoring environmental variables often require their own power supply since in most cases they are installed far from the main electrical networks. Solar panels, batteries, gasoline based, or manual power generators are frequently used to supply the necessary energy to the instruments. Generators and solar panels are prone to vandalism and therefore need full-time supervision. Batteries are small and easy to hide nevertheless the energy supply is finite. Therefore, systems that use batteries should be energy efficient. Embedded systems meet both specifications; they are small enough and energy friendly. In an embedded system greater sampling rates mean more power consumption, so the duration of the deployment needs to be balanced with adequate sampling rates. The microcontroller system Atmel (ATmega328) has a power requirement of only 60 mA. The voltage supplied by the amplifier is sampled by the embedded system and then compared with a predetermined voltage level. If the voltage sampled is greater than the predefined level, a continuous pulse train triggers an incremental counter. This process occurs until the voltage falls below a predetermined level. The value stored in the counter will be a function of the momentum transferred by the sand grain to the piezoelectric sensor. The predetermined level should be adjusted according to the predominant grain size. As an example, the tests carried out in laboratory for 0.5 mm sand grains suggested an appropriate threshold value of 200 mV (see Figure 1 in the main document). Sensor sensitivity can vary slightly due to capacitance differences. If during the testing process the variance in the capacitance of the sensor is greater than 10%, that piezoelectric sensor is regarded as faulty. Appendix B. The BassetBoussinesqOseen (B.B.O.) equation for the acceleration of a spherical particle in a fluid under 7 Figure A.3: Signal conditioner and amplifier circuit. the influence of gravity is given by Graf (1984): 4πa3 4πa3 2πa3 ρ s v̇ s = ρv̇ − ρ (v̇ s − v̇) − · · · 3 3 3 " # Z t a v̇ s (t1 ) − v̇(t1 ) − 6πµa (v s − v) + √ dt1 √ + ··· t − t1 πυ t0 4πa3 (ρ s − ρ) g + 3 (B.1) 400 where v(t) is the velocity of liquid phase (m s−1 ), v s (t) is the velocity of solid phase (m s−1 ), ρ s , ρ are the density of fluid and particle, respectively (kg m3 ); v̇, v̇ s are the acceleration of fluid and particle (m s−2 ); a is the particle radius, t0 the starting time (s); υ = µ/ρ the kinematic viscosity (m2 s−1 ); g the gravitational acceleration (m s−2 ). Figure A.4: Depth-velocity trajectories for 2 different grain sizes in flume found by Baas (2004). The graph is reproduced with permission from the author A.C.W. Baas. Appendix C. 425 405 Figure A.4 shows the graph for terminal velocity of two different grain sizes in a flume; Note that for grains with a diameter smaller or near 0.6 mm, velocity could be considered constant. 430 References 435 410 415 420 Arens, S., & van der Lee, G. (1995). Saltation sand traps for the measurement of aeolian transport into the foredunes. Soil Technology, 8, 61–74. doi:10.1016/0933-3630(95)00007-5. Baas, A. (2004). Evaluation of saltation flux impact responders (safires) for measuring instantaneous aeolian sand transport intensity. Geomorphology., 59, 99–118. doi:10.1016/j. geomorph.2003.09.009. Baas, A., & Sherman, D. (2006). Spatiotemporal variability of aeolian sand transport in a coastal dune environment. Journal of Coastal Research, 22, 1198–1205. doi:10.2112/06-0002.1. Bagnold, R. (1954). The Physics of Blown Sand and Desert Dunes. London: Methuen. Pp. 265. 440 445 8 Barchyn, T., & Hugenholtz, C. (2010). Field comparison of four piezoelectric sensors for detecting aeolian sediment transport. Geomorphology, 120, 368–371. doi:10.1016/j. geomorph.2010.03.034. Barchyn, T., Hugenholtz, C., Li, B., Neuman, C., & Sanderson, R. (2014). From particle counts to flux: Wind tunnel testing and calibration of the wenglor aeolian sediment transport sensor. Aeolian Research., 15, 311–318. doi:10.1016/j.aeolia.2014. 06.009. Bauer, B., & Namikas, S. (1998). Design and field test of a continuously weighing, tipping-bucket assembly for aeolian sand traps. Earth Surface Processes and Landforms, 23, 1171–1183. doi:10.1002/(SICI)1096-9837(199812)23: 13<1171::AID-ESP925>3.0.CO;2-H. Ellis, J., Morrison, R., & Priest, B. (2009). Detecting impacts of sand grains with a microphone system in field conditions. Geomorphology, 105, 87–94. doi:10.1016/j.geomorph.2008. 02.017. Ellis, J., Sherman, J., Farrell, E., & Li, B. (2012). Temporal and spatial variability of aeolian sand transport: implications for field measurements. Aeolian Research, 3, 379–287. doi:10.1016/j. aeolia.2011.06.001. Enriquez, C., Mariño Tapia, I., & Herrera-Silveira, J. (2010). Dispersion in the yucatan coastal zone: Implications for red tide events. Continental Shelf Research, 30, 127–137. doi:doi:10. 1016/j.csr.2009.10.005. Fryrear, D. (1986). A field dust sampler. Journal of Soil and Water 450 455 460 465 470 475 480 485 490 495 500 505 510 Conservation, 41, 117–120. Graf, W. (1984). Hydraulics of Sediment Transport.. Highlands Ranch, CO: Water Resources Publications. Hesp, P. (2011). Treatise on estuarine and coastal science. chapter Dune coast. (pp. 193–223). Waltham: Academic Press volume 3. Horikawa, K., & Shen, W. (1960). Sand movement by wind action (on the characteristics of sand traps). Tech. Memo. 119 US Army Corps of Engineers, Beach Erosion Board. Pp. 62. Hugenholtz, C., & Barchyn, T. (2011). Laboratory and field performance of a laser particle counter for measuring aeolian sand transport. Journal of Geophysical Research: Earth Surface., 116, –. doi:10.1029/2010JF001822. Jackson, D. (1996). A new, instantaneous aeolian sand trap design for field use. Sedimentology, 43, 791–796. doi:10.1111/j. 1365-3091.1996.tb01502.x. Jackson, D., & McCloskey, J. (1997). Preliminary results from a field investigation of aeolian sand transport using high resolution wind and transport measurements. Geophysical Research Letters, 24, 163–166. doi:10.1029/96GL03967. Leatherman, S. (1978). A new eolian sand trap design. Sedimentology, 25, 303–306. doi:10.1111/j.1365-3091.1978.tb00315.x. Mikami, M., Yamada, Y., Ishizuka, M., Ishimaru, T., Gao, W., & Zeng, F. (2005). Measurement of saltation process over gobi and sand dunes in the taklimakan desert, china, with newly developed sand particle counter. Journal of Geophysical Research: Atmospheres, 110, 1–12. doi:10.1029/2004JD004688. Namikas, S. (2002). Field evaluation of two traps for high-resolution aeolian transport measurements. Journal of Coastal Research, 18, 136–148. Nickling, W., & McKenna Neuman, C. (1997). Wind tunnel evaluation of a wedge-shaped aeolian sediment trap. Geomorphology, 18, 333–345. doi:10.1016/S0169-555X(96)00040-2. Poortinga, A., van Rheenen, H. A., Ellis, J., & Sherman, D. (2015). Measuring aeolian sand transport using acoustic sensors. Aeolian Research, 16, 143–151. doi:10.1016/j.aeolia.2014.12.003. Redmond, H., & Dial, J., K.D. andThompson (2010). Light scattering and absorption by wind-blown dust: theory, measurement, and recent data. Aeolian Research, 2, 5–26. doi:10.1016/j.aeolia. 2009.09.002. Ruiz, G., Mariño, I., Mendoza, E., Silva, R., & Enrquez, C. (2016). Identifying coastal defence schemes through morphodynamic numerical simulations along the northern coast of yucatan, mexico. Journal of Coastal Research, 32, 651–669. doi:10.2112/ JCOASTRES-D-15-00009.1. Schönfeldt, J. (2012). High resolution sensors in space and time for determination saltation and creep intensity. Earth Surface Processes and Landforms, 37, 1065–1073. doi:10.1002/esp. 3228. sensit (2013). Data processing and calibrations tm-h14-lin. technical note. http://www.sensit.com/resources/technicaldocuments.html. Accessed 10.03.16. Sherman, D., Jackson, D., Namikas, S., & Wang, J. (1998). Windblown sand on beaches: an evaluation of models. Geomorphology, 22, 113–133. doi:10.1016/S0169-555X(97)00062-7. Sherman, D., Li, B., Farrell, E., Ellis, J., Cox, W., Maia, L., & P., S. (2011). Measuring aeolian saltation: A comparison of sensors. Journal of Coastal Research, SP 59, 280–290. doi:10. 2112/SI59-030.1. Sherman, D., Swann, C., & Barron, J. (2014). A high-efficiency, low-cost aeolian sand trap. Aeolian Research, 13, 31–34. doi:10. 1016/j.aeolia.2014.02.006. Spaan, W., & van den Abeele, G. (1991). Wind borne particle measurements with acoustic sensors. Soil Technology, 4, 51–63. doi:10.1016/0933-3630(91)90039-P. Swann, C., & Sherman, D. (2013). A bedload trap for aeolian sand 515 520 525 530 9 transport. Aeolian Research, 11, 61–66. doi:doi:10.1016/j. aeolia.2013.09.003. Udo, K. (2009). New method for estimation of aeolian sand transport rate using ceramic sand flux sensor (ud-101). Sensors, 9, 9058– 9072. doi:10.3390/s91109058. Udo, K., Kuriyama, Y., & Jackson, D. (2008). Observations of windblown sand under various meteorological conditions at a beach. Journal of Geophysical Research: Earth Surface, 113, –. doi:10. 1029/2007JF000936. van der Wal, D. (1998). Effects of fetch and surface texture on aeolian sand transport on two nourished beaches. Journal of Arid Environments, 39, 533–547. doi:10.1006/jare.1997.0364. Wilson, S., & Cooke, R. (1980). Soil erosion. chapter Wind erosion. (pp. 217–251). Chichester: Wiley. Yurk, E., B.P.and Hansen, & Hazle, D. (2013). A deadtime model for the calibration of impact sensors with an application to a modified miniphone sensor. Aeolian Research, 11, 43–54. doi:10.1016/j. aeolia.2013.07.003.