")
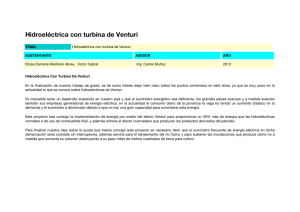
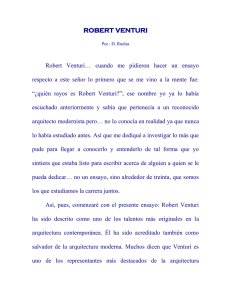
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Termofluidos “Experimentación y modelado en parámetros distribuidos de flujo cavitante en geometría Venturi” S Cruza, M Navarretea, FA Godíneza, J Naudeb, F Méndezb a Instituto de Ingenieria, Universidad Nacional Autónoma de Mexico, Av Universidad 3000 circuito exterior s/n, Ciudad Universitaria, CDMX 04510, Mexico. b Facultad de Igeniería, Universidad Nacional Autónoma de México, Av Universidad 3000 circuito interior s/n, Ciudad Universitaria, CDMX 04510, México. *Autor contacto: mnm@iingen.unam.mx RESUMEN En la industria es común el uso de caudalímetros críticos (toberas y venturis) que entregan un caudal másico constante de gases y vapores, su característica distintiva es que el fluido es acelerado a velocidad sónica en la garganta y el caudal queda determinado únicamente por el estado del flujo de la entrada. Cuando el fluido de trabajo es un líquido (cerca del estado saturado o superenfriado) estos operan con principios diferentes, en éstos se producen cambios de fase (liquido-vapor) que causan la condición de flujo ahogado (choked). El flujo multifásico (líquido y burbujas de vapor-gas) que se forma en la garganta reduce la velocidad de propagación de las ondas de presión, debido a su compresibilidad, y se producen fenómenos dinámicos con consecuencias fisicoquímicas, luminiscentes y emisión de ondas de choque a velocidades de flujo moderadas. En este trabajo se realiza un estudio teórico-experimental para elucidar las diferentes etapas en las que puede operar un tubo Venturi equiparándolo con sus potenciales aplicaciones. Palabras Clave: Cavitación hidrodinámica, condiciones crítica de flujos, parámetros distribuidos, cavitación aplicada. ABSTRACT In industry it is common to use critical flow meters (nozzles and venturis) that deliver a constant mass flow of gases and vapors, its distinguishing characteristic being that the fluid is accelerated to sonic velocity in the throat and the flow is determined only by the state of the input flow. When the working fluid is a liquid (near the saturated or supercooled state) these operate with different principles, in which there are phase changes (liquid-vapor) that cause the condition of drowned (choked) flow. The multiphase flow (liquid and vapor-gas bubbles) formed in the throat reduces the propagation velocity of pressure waves due to their compressibility, and dynamic phenomena occur with physicochemical, luminescent and shock wave emission At moderate flow rates. In this work a theoretical-experimental study is carried out to elucidate the different stages in which a Venturi tube can be operated, matching it with its potential applications. Keywords: Hydrodynamic cavitation, Critical flow meters, Distributed parameters, Applied cavitation. 1. Introducción Cuando la presión de un flujo confinado decrece hasta llegar a un valor inferior a la presión de vapor, la cavitación aparece. Estas discontinuidades llenas de vapor y gas se presentan como burbujas, y luego como conglomerados formando superficies, nubes o vórtices, etc. Su apariencia y estructura dependen de las características hidrodinámicas de dicho flujo y de la geometría que lo conduce. En la mayoría de los casos, la cavitación tiene un efecto negativo, el fenómeno es responsable de problemas como la erosión, ruido y vibraciones, los cuales conllevan a un mal funcionamiento de las turbomáquinas y dispositivos ISSN 2448-5551 TF 18 hidráulicos. Por otra parte, en algunos casos particulares, tiene un efecto positivo por ejemplo: logrando reducir el arrastre, como en el caso de los vehículos submarinos [1], aumentando la eficiencia de las reacciones químicas [2], para procesos de limpieza o preparación de nanopartículas, entre otras cosas [3]. La dinámica que presentan los Venturis cavitantes se estudia desde hace 60 años debido a la amplia gama de fenómenos que presenta su comportamiento [4]. Por ejemplo en la referencia [5] se desarrolla un modelo teórico junto a mediciones experimentales que enfatizan el papel preponderante que tiene el porcentaje de vapor en el comportamiento del flujo. Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Recordemos que un tubo Venturi es un dispositivo diseñado para medir y/o controlar flujo. Consiste en una entrada convergente conectada a una constricción (garganta) que a su vez está conectada a una sección divergente. El flujo pasa a través del Venturi presenta una caída en la presión entre la entrada y la garganta que se relaciona con el caudal másico. Figura 1. Zonas de un tubo Venturi en condiciones cavitantes. Diagrama indicando sus principales zonas y el comportamiento de una nube de burbujas. Innumerables estudios de tubos Venturi como caudalímetros se han llevado a cabo en las últimas décadas [6-10], ver Fig. 1. Hay situaciones en donde el objetivo es controlar el caudal, como en los motores de cohetes propulsores de líquido [11] y en los carburadores para automóviles [12], por mencionar sólo un par de ejemplos. Desde un punto de vista teórico, se han desarrollado varios enfoques para modelar las características de flujo de un Venturi. El trabajo pionero en el flujo de dos fases a través de una boquilla convergentedivergente fue realizado por Tangren et al. [13]. Asumieron una relación barotrópica entre la presión y la densidad del fluido, despreciando así la dinámica de la burbuja de la mezcla. En un trabajo posterior, Wijngaarden [14] y Wang & Brennen [15] demostraron que la dinámica de la burbujas afecta el comportamiento del flujo binario. Ellos calculan el flujo a través de un Venturi mediante la aplicación de un modelo de mezcla de burbujas continuo no lineal en el que el crecimiento, el colapso y los rebotes de las burbujas se simulan a través de la ecuación de Rayleigh-Plesset. Otras contribuciones importantes en la misma línea de investigación han sido realizadas por Delale et al. [16] y Moholkar y Pandit [17]. A pesar de los avances alcanzados, todos los modelos mencionados son aproximaciones y no dan una descripción completa del comportamiento de flujo cavitante en geometría Venturi. Así encontramos una serie de modelos refinados con condiciones de estado no estacionario, por ejemplo el de Preston [18] encontró que dependiendo del valor del número de cavitación, , se tienen cuatro diferentes regímenes de flujo: 1) flujo en estado estacionario sin formación de ondas de presión ~1.2; 2) la caída de presión es alta y causa ahogamiento en la garganta y hay formación de ondas presión estacionarias en la sección divergente, ~ 0.94; 3) la caída de presión es tan alta que llega a causar que la onda de choque se desplace hacia fuera de la sección divergente y se propaga aguas abajo,~ 0.93; y 4) flujo estacionario sub-expandido. La creciente potencial en el cálculo, así como el software de CFD libre y comercial disponibles, han permitido cálculos precisos para simular la interacción de líquidos y gases con ISSN 2448-5551 superficies como el flujo de burbujas multifásico en Venturis [19-21]. Pero, como se verá más adelante, los experimentos revelan regímenes en el flujo más complejos que los predichos numéricamente. Extensas investigaciones experimentales de flujo a través de Venturis se han llevado a cabo utilizando técnicas de medición como PIV [22-24], video ultrarrápido en el intervalo de rayos X [25], procedimientos de visualización con técnicas como Schlieren [26], de sombras [27] y por dispersión láser [28]. Por otra parte, también hay estudios de emisión acústica y sensores de presión [29]. Además, la emisión de luz en el colapso de burbujas individuales y nubes se detectan utilizando fotomutiplicadores [30]. En los últimos años, la visualización del flujo con video de alta velocidad ha revelado en gran detalle la presencia e interacción de fenómenos complejos y regímenes de flujo cuya evolución temporal y localización a lo largo del tubo dependen de varios factores, incluyendo la potencia de la bomba, relación líquido/gas/vapor, los efectos de la tensión superficial y la viscosidad del líquido, el perfil y las dimensiones del Venturi, la fricción entre sólido / fluido y los efectos de los cambios en las variables termodinámica (presión, temperatura, densidad) en el flujo, entre otros. Algunos ejemplos de esta variedad de fenómenos son: a) patrones de flujo cavitante como: burbujas cavitantes viajeras, vórtices formados de burbujas y supercavitación [31]; b) ondas interfaciales en flujos bifásicos anulares y fenómenos de atomización [32]; c) formación de estructuras cilíndricas llenas de vapor, cavidades de vapor especulares y plumas de vapor; c) mezclas turbulentas espumosas [30], etc. Toda esta plétora de fenómenos y su dependencia de muchos factores hacen difícil establecer un comportamiento de flujo universal dentro de un Venturi. 1.1. Velocidad del sonido en un líquido con burbujas Las burbujas en los flujos cavitantes, además de contener vapor del líquido suelen contener cierta cantidad de gas permanente que se difunde desde el líquido a medida que se expanden y no tienen el tiempo suficiente para re-disolverse durante el colapso [35]. Una de las consecuencias de la presencia de las burbujas en estos flujos es su marcada reducción en la velocidad de propagación de las ondas de presión. Debido a esta baja velocidad de sonido, se desarrollan los fenómenos asociados con la compresibilidad, como son por ejemplo los choques producidos por condensación que se propaguen lentamente. Los experimentos de Reisman et al [36] aclaran que los choques de condensación causan grandes picos de presión en el orden de cientos de kPa. En resumen, dos parámetros clave: la densidad y la compresibilidad son responsables del cambio de la velocidad del sonido, un monitoreo cuidadoso del espectro en frecuencia en función de la potencia de la bomba captura indirectamente el cambio en el volumen gas/vapor en el líquido. TF 19 Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO geometría Venturi, aparece también el mecanismo de generación de ruido adicional pero en forma masiva. Hay en realidad un enorme número de burbujas de diferente talla y tiempo de colapso, por lo que es difícil predecir numérica o analíticamente el valor y posición exacta del ruido emitido. Sin embargo, si podemos calcular el orden de los valores de dichas frecuencias para velocidades de flujo en particular. Por lo anterior, el siguiente modelo trata de emular el comportamiento que exhibe la frecuencia de un flujo cuando pasa por una geometría Venturi. Las características Así, se aplican las ecuaciones de continuidad y movimiento de Navier-Stokes [27], considerando un flujo bifásico unidimensional con una fase dispersa homogénea que entra en equilibrio (termodinámico y mecánico) a un tubo con geometría Venturi por lo que tenemos que para M<1: 1.2. Ruido producido por flujos cavitantes Cuando se presenta la cavitación dentro de un dispositivo hidráulico, emerge en forma adicional un mecanismo de generación de ruido – el llamado ruido de cavitación que tiene un crujido o silbido muy característico –. El ruido es producido por las ondas pulsantes emitidas por las burbujas (monopolos) y por su colapso (implosión de las burbujas de vapor) en el momento en que entran en la región de alta presión. Al comienzo del proceso (cavitación incipiente), las burbujas son pequeñas y pocas, ellas colapsan causando variaciones de presión debido al cambio de su volumen y el ruido es proporcional a la segunda derivada de su volumen en función del tiempo así, el impulso acústico se determina integrando las variaciones de la presión. Esto se expresa para una única burbuja por la ecuación para una fuente y su integración nos da el impulso acústico: 𝜌 𝑑2 𝑉 (1) 𝑡 𝑝𝑎 (𝑥, 𝑡) = 𝐿 2 , 𝐼 = ∫𝑡 2 𝑝𝑎 𝑑𝑡, (Pa·s) en donde pa es la 4𝑟𝜋 𝑑𝑡 1 presión acústica, t1 es el tiempo inicial del impulso acústico en (s) y t2 es el tiempo de la duración del impulso debido al colapso de la burbuja. 𝜕𝜌(𝑥, 𝑡) 𝜕𝑢(𝑥, 𝑡) 𝑢(𝑥, 𝑡)𝜌(𝑥, 𝑡) 𝜕𝐴(𝑥) 𝜕𝜌(𝑥, 𝑡) + 𝜌(𝑥, 𝑡) + + 𝑢(𝑥, 𝑡) =0 𝐴(𝑥) 𝜕𝑡 𝜕𝑥 𝜕𝑥 𝜕𝑥 (2) Ecuación de movimiento 1 𝜕𝐴(𝑥)𝑢2 (𝑥, 𝑡)𝜌(𝑥, 𝑡) 𝜕𝑃(𝑥, 𝑡) 𝒫𝜏0 𝜕𝜌(𝑥, 𝑡)𝑢(𝑥, 𝑡) + =− + 𝜕𝑡 𝐴(𝑥) 𝜕𝑥 𝜕𝑥 𝐴(𝑥) 1.3. Modelado en parámetros distribuidos Los modelos en parámetros distribuidos son aproximaciones que engloban variables locales dominantes para determinar la respuesta tanto de la dinámica puntual como general de un sistema cerrado bajo una perturbación que al cederle o quitarle energía compromete su estabilidad. Sus aplicaciones abarcan el modelado de diversos procesos físicos continuos como son la conducción de calor, vibraciones, propagación de ondas, hidrodinámica y aerodinámica. Estas aproximaciones también son usadas para el estudio de la cavitación ya que las variaciones que inician una dinámica específica empiezan a nivel local [34]. Este tipo de análisis implica que el sistema es representado y analizado usando ecuaciones diferenciales parciales. Resumiendo, el objetivo principal de este trabajo es estudiar experimentalmente y modelar numéricamente el flujo bifásico que pasa a través de un Venturi usando como líquido agua de grifo. El modelo matemático que se usa para calcular el comportamiento el flujo estacionario bifásico es mediante parámetros distribuidos y se describe en la sección 2. En la sección 3 se describe el arreglo experimental. En la sección 4, los resultados experimentales son expuestos y discutidos. Dentro de esta sección se realiza una comparación entre simulaciones y los datos experimentales. Las observaciones finales se resumen en la sección 5. 2. Modelado Cuando se presenta la cavitación dentro de un dispositivo hidráulico, en nuestro caso un dispositivo pasivo con ISSN 2448-5551 Ecuación de continuidad TF 20 (3) Velocidad del sonido en el medio 𝛼 1−𝛼 𝜕𝑃(𝑥, 𝑡) = [(𝛼𝜌𝑣 + (1 − 𝛼)𝜌𝑙 ) ( + )] 𝜕𝜌(𝑥, 𝑡) 𝛾𝑃(𝑥, 𝑡) 𝜌𝑙 𝑎𝑙2 −1 𝛼𝜌 −1 ] ≈[ 𝛾𝑃(𝑥, 𝑡) en donde: 𝛼(𝑥, 𝑡) = 𝑓𝑟𝑎𝑐𝑐𝑖ó𝑛 𝑣𝑜𝑙𝑢𝑚é𝑡𝑟𝑖𝑐𝑎, 𝜌(𝑥, 𝑡) = 𝑑𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝑑𝑒 𝑙𝑎 𝑚𝑒𝑧𝑐𝑙𝑎, 𝑢(𝑥, 𝑡) = 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑙𝑜𝑐𝑎𝑙 𝑑𝑒𝑙 𝑓𝑙𝑢𝑗𝑜, 𝐴(𝑥) = á𝑟𝑒𝑎 𝑡𝑟𝑎𝑛𝑠𝑣𝑒𝑟𝑠𝑎𝑙 𝑒𝑛 𝑙𝑎 𝑝𝑜𝑠𝑖𝑐𝑖ó𝑛 𝑥 , 𝜏0 = 𝑓𝑢𝑒𝑟𝑧𝑎𝑠 𝑑𝑒 𝑓𝑟𝑖𝑐𝑐𝑖ó𝑛, 𝑃(𝑥, 𝑡) = 𝑝𝑟𝑒𝑠𝑖ó𝑛 𝑎 𝑙𝑎 𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑥, 𝒫(𝑥) = 𝑝𝑒𝑟í𝑚𝑒𝑡𝑟𝑜 𝑒𝑛𝑙𝑎 𝑝𝑜𝑠𝑖𝑐𝑖ó𝑛 𝑥 𝑡 = 𝑡𝑖𝑒𝑚𝑝𝑜, 𝑥 = 𝑐𝑜𝑜𝑟𝑑𝑒𝑛𝑎𝑑𝑎 𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑𝑖𝑛𝑎𝑙, 𝑥 , 𝛾 = í𝑛𝑑𝑖𝑐𝑒 𝑝𝑜𝑙𝑖𝑡𝑟ó𝑝𝑖𝑐𝑜, 𝑎 = 𝜕𝑃(𝑥, 𝑡)⁄𝜕𝜌(𝑥, 𝑡) 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒𝑙 𝑠𝑜𝑛𝑖𝑑𝑜 𝑒𝑛 𝑒𝑙 𝑚𝑒𝑑𝑖𝑜 s = pendiente geométrica del Venturi M = número de Mach Subíndices l= fase líquida y υ= fase de vapor. A partir de las ecuaciones (1)-(3) se determinan los parámetros distribuidos R(x), L(x) y C(x). Para encontrar estos parámetros en función de la geometría Venturi, su longitud total, L, se divide en un numero finito de celdas con talla x constante que representa la impedancia en x (considerando tanto del flujo como la geometría). Así, usando el concepto de derivada Lagrangiana (𝜕𝑃 ⁄𝜕𝑡 + Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO 𝑢 𝜕𝑃 ⁄𝜕𝑥 ) y la velocidad del sonido (3); la ecuación de continuidad (1) se reduce a: 2 1 𝜕𝑢(𝑥, 𝑡) ⏞ −1 𝑑𝑃(𝑥, 𝑡) ⏞1 𝜕𝐴(𝑥) = 2 − 𝑢(𝑥, 𝑡). 𝜕𝑥 𝜌𝑎 𝐴(𝑥) 𝜕𝑥 𝑑𝑡 (4) La ecuación (4) se asocia a la capacidad que tiene el flujo para transferir energía. El primer término representa la analogía eléctrica de la capacitancia del flujo C(x), que es solo dependiente de la compresibilidad del medio, en serie al segundo término que es una resistencia estática Re(x). Para determinar la inductancia L(x) se desarrolla las derivadas de la ecuación (2) y se incluye la igualdad (4), así con la velocidad del sonido del medio (3), la definición del número de Mach M y el concepto de pérdidas en ductos con lo cual se tiene una relación en donde se distinguen los términos distribuidos a saber: 2 1 𝜕𝑃(𝑥, 𝑡) ⏞ 𝜌 𝜕𝑢(𝑥, 𝑡) ⏞ 𝑀 𝜕𝑃(𝑥, 𝑡) = 2 − 𝜕𝑥 𝑀 −1 𝜕𝑡 𝑎(𝑀2 − 1) 𝜕𝑡 3 ⏞ 1 𝜕𝐴(𝑥) 𝜀 𝜌 −[ − ] 𝑢2 𝐴(𝑥) 𝜕𝑥 2𝐷(𝑥) (𝑀2 − 1) (5) que representan en conjunto la impedancia de entrada en cada celda. El primer término representa la inductancia L(x), que es solo función de los cambios en el fluido debidos a su velocidad. El segundo término, es una capacitancia dinámica cuya magnitud es inferior a la establecida en la ecuación (4) y debido a que a >>M se elimina. El último término, es la resistencia del flujo total R(x), que engloba tanto los cambios geométricos como los dinámicos. La existencia de los parámetros distribuidos en forma implícita en las ecuaciones de Navier-Stokes señala obviamente la transferencia de energía que existe entre las fases de la mezcla. 2.2. Modelo aplicado a una geometría Venturi El modelo anterior se aplica para determinar el comportamiento de la frecuencia para un Venturi con las características geométricas ilustradas en la figura 2 y las propiedades físicas que se tiene en la ciudad de México, ver Tabla 1. Figura 2. Corte longitudinal del tubo Venturi indicando sus características geométricas. La longitud de la garganta se diseña para dar tiempo a la transferencia de calor entre el gas atrapado y los alrededores del líquido, lo cual es decisivo con respecto al fenómeno de la luminiscencia. A1/A2 = 14.95, Cd = 0.995, L = 265mm, material de manufactura acrílico comercial. En la Fig. 3 se despliegan los perfiles para la relación de frecuencias del tubo Venturi, en donde los cálculos de (𝜔 = ∫ 𝜔0 𝑑𝑥 ) entre su magnitud 𝜔∗ = √𝛾𝑃(𝑥, 𝑡)⁄𝑠𝜌𝑙 se aproximan para la condición de régimen estacionaria sin choques en donde se cumple que M ≤ 0.3. 2.1. Cálculo de la velocidad de onda y su frecuencia Se establecen la velocidad de la onda 𝐶0 , y su frecuencia natural 𝜔0 (𝑥) asociando los términos de las ecuaciones desarrolladas en el inciso anterior con su analogía con los lementos de transmisión eléctrica: 𝐶𝑜 2 = 1 = 𝑎2 [1 − 𝑀 2 ] , 𝐿(𝑥)𝐶(𝑥) 𝐶𝑜 𝑎 √1 − 𝑀 2 . 𝜔0 (𝑥) = = 𝐷(𝑥) 𝐷(𝑥) (6) (7) En donde D(x) es el diámetro transversal de la tubería. De acuerdo a la ecuación (8) y (9), tanto la velocidad como frecuencia de la onda generada son complejas y su valor real o imaginario se establecen mediante 𝑀. En otras palabras, para valores reales (𝑀 < 1) la velocidad de onda es inferior a la del sonido en el medio. Así mismo, el atractor principal es la frecuencia de la geometría del Venturi y sus cambios se deben a las variaciones de 𝛼, 𝑎 𝑦 𝑀. ISSN 2448-5551 Fig. 3. Relación de frecuencias entre su magnitud en función de la longitud del tubo Venturi, en estado estacionario, para α=0.9, α=0.7, α=0.5. Los perfiles de frecuencia se inician desde un 𝜔0 debido a la frecuencia natural de la estructura del sistema hidráulico que soporta al tubo Venturi con sus características elásticas e inerciales por lo que es un “atractor”. Al pasar el fluido bifásico a través de sistema, esta frecuencia se va modificando por la compresión-expansión del fluido que se induce por la geometría del Venturi, el orden de la compresión-compresión depende de la fracción volumétrica de aire-vapor que contenga el fluido. Así, en los 3 perfiles de la Fig. 3 se observa que la frecuencia se incrementa desde la tobera y alcanzar su valor máximo a salida de la garganta para disminuir en el difusor. También, conforme se incrementa aumenta el máximo de la frecuencia. TF 21 Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Como el atractor principal en la frecuencia de la geometría Venturi, los cambios se deben a las variaciones de 𝛼, 𝑎, y M del flujo como se muestra en los perfiles de la Fig. 4, en donde cada perfil corresponde a diferentes cálculos para diferentes aumentando M. Figura 5. Arreglo experimental. Esquema del circuito hidráulico indicando sus principales componentes, medidores, tanques y válvulas de regulación de gasto. Figura 4. Perfiles de frecuencias (𝝎 = ∫ 𝝎𝟎 𝒅𝑴) entre su magnitud (𝜔∗ = √𝛾𝑃(𝑥, 𝑡)⁄𝐷(𝑥)𝜌𝑙 ) en función del número de Mach, cuando 𝑫(𝒙) = 𝒄𝒕𝒆. para α=0.9, α=0.7, α=0.5. De acuerdo a la Fig.4, tanto el incremento en M como en α desfasan las frecuencias a magnitudes mayores. En otras palabras, ambos números adimensionales están implicados directamente tanto en la frecuencia natural como en su ancho de banda que van variando conforme el fluido va pasando por la geometría Venturi. 3. Circuito experimental En la Fig. 5 se esquematiza el circuito hidráulico en donde se realizan las corridas experimentales con sus componentes y equipo electrónico e instrumentos. El circuito cuenta con un sistema de enfriamiento, una bomba de 5 hp controlada por un convertidor de frecuencia que asegura un ajuste de la tasa de flujo del líquido, dos válvulas de regulación de gasto, un tanque de almacenamiento 70 l con sistema de enfriamiento, y un tanque auxiliar de 300 l, la tubería del circuito es de PVC de 2 pulgadas cédula 40 y 80. El tubo Venturi es manufacturado en PMMA para permitir la visualización, tiene una sección interna circular y una externa rectangular, la garganta es de 66x6.6 mm y una longitud total de 265 mm. La instrumentación consta de tres transductores de piezoeléctricos centrados en 500 kHz, 1 MHz, 5 MHz respectivamente cuyas señales son adquiridas con un osciloscopio digital de 1GHz. La tasa de flujo (gasto, l/s) se mide mediante manómetro de Hg en forma de U. Los datos de temperatura y el porcentaje de oxígeno en disuelto son colectados vía un sistema de adquisición de datos. ISSN 2448-5551 TF 22 3.1 Instrumentación. Se cuenta con un variador de frecuencia de tipo incremental Yaskawa J1000 que se emplea para el control de velocidad rotacional de la bomba de 5 HP. Un fotomultiplicador (Hamamatsu Photonics; R5783-04) se orienta y se fija para detectar la luminiscencia en la parte divergente del dispositivo Venturi. Un sensor de fuerza dinámico (PCB Piezotronics, ICP 200B05) y un piezoeléctrico centrado en 5 MHz (Olimpus, V310-SU) se fijan en la garganta para adquirir el ruido acústico y la fuerza producidos durante la cavitación. Las señales son capturadas con un osciloscopio digital (Lecroy LC584AM, 1GHz). La concentración de oxígeno disuelto en el líquido se mide con un sensor de fibra óptica (Piccolo2, Pyro Science). Este sensor se fija en el interior del tanque de enfriamiento. También, se adquiere Video de alta velocidad usando una cámara Phantom v.1 en un intervalo de 25,000-40,000 cuadros por segundo (cps). 3.2 Procedimiento experimental La corrida experimental empieza cuando el fluido, que en éste caso es agua natural (mezcla de agua pura con sólidos, líquidos y gases disueltos en suspensión) que se obtiene del grifo, esta se recicla en el circuito para obtener una mezcla homogénea aire-liquido, con el sistema de enfriamiento funcionando hasta que el líquido alcanza a la temperatura de 15 ° C. Fijando la potencia de la bomba al 10% se mide el oxígeno disuelto del líquido. El Venturi es usado también como medidor de la velocidad del flujo, por lo que tiene conectado un manómetro tipo U de mercurio. En la Tabla 1 se indican las propiedades termodinámicas principales del líquido de trabajo. Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Tabla I. Propiedades físicas del agua natural Propiedad Punto de ebullición Valor 373.12 K @ 1 atm Punto de fusión 273.15 K @ 1 atm Condiciones críticas 647.1K pCR=22,06MPa, ρCR=322 kg/m3 Presión de vapor 15 º C 25 º C 60 º C Peso molecular Viscosidad dinámica, 15 °C 60 °C Densidad en estado líquido a 15°C Densidad en estado de vapor a 100 °C Densidad del vapor a 20°C 1.71 [kPa] 3.06 [kPa] 19.92 [kPa] la bomba. Estos datos son adquiridos durante cada corrida experimental. El perfil de DO disminuye y el de [H2O(g)] aumenta, el primero nos indica hay menos aire disuelto para la nucleación de burbujas y por ende mayor energía para aumenten su radio máximo lo que significa que presentaría un colapso más violento. El segundo perfil, nos demuestra que no hay condensación total del vapor a la salida del Venturi ya que aumenta levente la proporción del vapor disuelto en el tanque. 0.018 [Kg/mol] 1.139 [mPa·s] 0.466 [mPa·s] 997.38 Kg/m3 3 0.597 Kg/m 0.02176 Kg/m3 a =1481 m/s a (p < 1 MPa) a= 404 m/s 3.3 Caracterización del sistema hidráulico Primeramente, se realiza la caracterización en frecuencia del sistema hidráulico sin líquido y apagado usando un sensor de fuerza fijado sobre la tubería cerca de donde se encuentra el Venturi. La prueba consiste en aplicar un golpe sobre la tubería como fuente de excitación acústica (de banda ancha) y adquirir la señal acústica que capta el sensor cuando el sistema está sin líquido y con líquido, ver Fig 6. Los perfiles de los espectros respectivos se presentan en la Fig. 7. Entre ambos perfiles se distingue un desplazamiento de alrededor de 1 kHz como un efecto del aumento de masa cuando se llena de líquido el tubo Venturi (en negro). Figura 6. Esquema del circuito hidráulico indicando la posición de los sensores para determinar la frecuencia natural del sistema hidráulico. Fig. 8. Condiciones de oxígeno disuelto en el tanque de enfriamiento. El tiempo de una corrida experimental es de alrededor 20 min, en éste tiempo el aire disuelto disponible en el líquido para formar burbujas cae a un 60%. En la Fig. 9 se despliegan las señales de PMT y los pulsos de presión que se detectan a la salida del tubo Venturi, cuando bomba alcanza entre el 60-70 % de su potencia. También, se distingue que en un intervalo de tiempo de 45 ms se detectan cuatro pulsos de luz de diferente magnitud y seis agrupaciones de pulsos de presión. No todos los grupos de pulsos de presión coinciden en tiempo con la emisión de luz. Fig. 7. Espectro en frecuencias del sistema hidráulico con y sin líquido. Tiempo, ms En la Fig. 8 se muestran los perfiles el porcentaje de oxígeno disuelto, DO y la concentración de vapor, [H2O(g)] ambos en ppm y en función del aumento del porcentaje de potencia de ISSN 2448-5551 Fig. 9. Señales provenientes del fotomultiplicador y del sensor de fuerza, fijados a la salida del Venturi. TF 23 Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Con los perfiles que muestra la Fig. 11 se determina la condición de ahogamiento del Venturi, que se alcanza cuando la potencia de la bomba se encuentra en el intervalo del 68-75 %, que corresponde a = 0.5 ± 0.2, en este mismo intervalo se detecta emisión de luz en a la salida del difusor. En la Fig. 12 se grafican la presión de entrada y de salida del tubo Venturi, marcando la zona de ahogamiento y el picos de presión, así como oscilaciones. Fig. 10 Perfil del tiempo de arribo que ajusta a los datos adquiridos (*) en donde se observa que hay una caída de magnitud en la velocidad del sonido del flujo bifásico al aumentar el % de potencia de la bomba. La velocidad del sonido del flujo bifásico que se forma en la garganta también fue medida mediante la técnica del martillo. Aquí, se deja caer a una altura de 2 cm un sensor de impacto sobre la superficie plana, en la parte superior de la garganta del Venturi, y del otro lado se coloca otro sensor piezoeléctrico que nos dice el tiempo de arribo en que llega el impulso. Con estos datos se puede ver en la Fig. 10 que al aumentar el % de potencia de la bomba el tiempo de arribo aumenta y luego dramáticamente cae. Lo que significa que la velocidad del sonido de flujo bifásico baja hasta en dos órdenes en magnitud con respecto a la del líquido solo. Fig. 12. Perfiles de la presión de entrada y de salida del dispositivo Venturi como una función del aumento de la potencia de la bomba, en (%). Obviamente, al aumentar la potencia, la velocidad del flujo aumenta también hasta alcanzar el ahogamiento en la garganta. 4. Resultados La Fig. 11 muestra el comportamiento del número de cavitación, s, y la caída de presión en la garganta como una función del % de la potencia de la bomba. Fig. 11. Datos adquiridos a partir de varias corridas experimentales, en donde se observa como varían el número de cavitación, y la caída de presión en la garganta del Venturi. ISSN 2448-5551 TF 24 En la Fig. 13 se despliegan los espectros en frecuencia del ruido adquirido cerca de la garganta del Venturi, en donde se observa que al aumentar la velocidad del flujo aumenta también la amplitud y el ancho de banda de los espectros. Fig. 13. Espectros en frecuencia de las señales adquiridas en función de la potencia de la bomba con un piezoeléctrico pegado a la zona de la garganta y sobre la salida del difusor. Cuando se detecta la presencia de luz el intervalo de ruido se encuentra entre de 6-12 kHz. Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Observaciones generales en el video tomado a alta velocidad (las imágenes no son incluidas). Al 30%; La cavitación incipiente es visible, las inestabilidades de KelvinHelmholtz generan remolinos en las interfaces a lo largo de la línea horizontal. Como sabemos, dentro de los remolinos la presión es menor que en el exterior dando lugar a la evaporación, llevando a la formación de una mezcla de capa de cavitación. Al 50%; la implosión de las burbujas tiene lugar a 48 mm de la garganta, donde aparecen filamentos de burbujas no periódicos, el caudal en la pared alcanza los 6,8 m /s y 14 m/s en la parte media. Al 65%; la implosión de los filamentos se produce a 29 mm de distancia de la garganta, mientras que el caudal en el centro alcanza los 28 m/s. A este nivel, la emisión de ondas de choque se hace observable. Al 65%; una nube de burbujas se estanca y va creciendo de forma ordenada a 13,6 m /s hasta que la sección divergente del Venturi se llena completamente. Esta nube se forma y se destruye periódicamente en el mismo lugar. Un aumento adicional en la potencia de la bomba (70%) hace que la nube vuelva a nacer en la sección recta del tubo. Creemos que esto se debe en parte a la preexistencia de estructuras de núcleos-racimos que de repente crecen por una caída repentina de presión por la coda de las ondas de choque. A este nivel, las nubes en la zona divergente y en la sección recta de la tubería emiten ondas de choque hacia la fase líquida a una velocidad aproximada de 2450 m/s. Del análisis del ruido acústico el ancho de banda de emisión de ruido cavitante se encuentra entre (6-10) kHz: mientras la emisión de luz corresponde al intervalo de ruido entre (8-10) kHz. 4.1. Comparación entre modelo-experimentos Desde el punto de vista experimental nuestro sistema hidráulico es capaz de alcanzar las cuatro regímenes de comportamiento de flujo que se describe la referencia [18] a saber: 1) flujo estacionario sin choques; 2) ahogamiento de la garganta y generación de choque estacionario en la sección divergente del Venturi; 3) producción de choque no estacionario que se desplaza fuera de la sección divergente; 4) formación de flujo intermitente. Sin embargo, en nuestros experimentos, a diferencia de ellos, en todos nuestros perfiles siempre se presenta un salto que consideramos que se debe a un efecto de rotación en el flujo intermitente. De acuerdo al modelo cuando se incrementa el valor de y M, se incrementan las ondas de presión progresivamente desde la tobera, alcanzo las máximas frecuencias en la garganta, ver Fig. 2, que concuerda con la Fig. 13 de los espectros en la garganta. Venturi. Encontramos que estos elementos están en función principalmente de , a y M. Este estudio se ampliara en otro trabajo tomando en cuenta la rotación mediante vórtices. Agradecimientos Trabajo patrocinado por el Programa de Apoyo a Proyectos de Investigación Tecnológico PAPIIT-UNAM, IN105117: Erosión por cavitación óptica, ultrasónica e hidrodinámica. REFERENCIAS 1] 2] 3] 4] 5] 6] 7] 8] 9] 10] 11] 12] 13] 14] 15] 16] 17] 18] 19] 4. Conclusión 20] Se ha estudiado experimentalmente y analíticamente la dinámica y la acústica de un flujo bifásico en geometría Venturi. Encontramos que usando un modelo simple barotrópico en donde incluyen las analogías de los elementos eléctricos L(x), C(x) y R(x) es fácil estimar las frecuencias correspondientes a la primer régimen de flujo en dispositivo ISSN 2448-5551 21] 22] 23] TF 25 P. Tomov, S. Khelladi, F. Ravelet, C. Sarraf, P Bakir, P. Vertenoeuil. Exp. Thermal and Fluid Science 70 (2016) 85. I. Nesteruk. Supercavitation. Advances and Perspectives. Springer-Verlag Berlin Heidelberg (2012). H. Soyama, J Hoshino. Applied Physics Reviews 6 (2016) 045113. P. Jarman, K Taylor. Brit. J. Appl. Phys., 16 (1965) 67. R. Ishii, Y. Umeda, S. Murata, N Shishido. Physics of Fluids A: Fluid Dynamics 5(7)(1993) 1630. X. Huang, S.W. Van Sciver. Cryogenics 36(4)(1996) 303. T. Elperin, A. Fominykh, M. Klochko. Flow Measurement and Instrumentation 13 (1–2) (2002)13. Z. Huang, D. Xie, H. Zhang, H. Li. Flow Measurement and Instrumentation, 16(23)(2005)177. Z. Meng, Z. Huang, B. Wang, H. Ji, H. Li, Y. Yan. Flow Measurement and Instrumentation 21(3)(2010)268. H. Ghassemi, H. Farshi. Flow Measurement and Instrumentation 22(5)(2011) 406. A. Ulas. Flow Measurement and Instrumentation 17(2)(2006)93. E. Itano, A. Shakal, J. Martin, D. Shears, et al., SAE Technical Paper 961730, 1996. R. F. Tangren, C. H. Dodge, H. S. Seifert, Journal of Applied Physics 20(1949)637. L. Wijngaarden. Annual Review of Fluid Mechanics, 4(1972)369. Y. Wang, C.E. Brennen. ASME. J. Fluids Eng. 120(1)(1988)166. C. F. Delale, G. H. Schnerr, J. Sauer. Journal of Fluid Mechanics, 427 (2001)167. V.S. Moholkar, A.B. Pandit. Chemical Engineering Science, 56(4)(2001)1411. A. T. Preston, T. Colonius, C.E. Brennen. Physics of Fluids 14 (2002) 300. A. B. Tausif, G. S. Advait, V. M. Amit, A. B. Pandit, Can. J. Chem. Eng. 89(2011)1366. D. A. Arias, T. A. Shedd. Journal of Fluids Engineering 129 (2007) 1193. J. Kumar, J. Singh, H. Kansal, G. Singh Narula, P. Singh, IJRMET 4(2) (2014) 2. K. Harada, M. Murakami, T. Ishii. Cryogenics 46(9) (2006) 648. D. Giddings, B.J. Azzopardi, A. Aroussi, S.J. Pickering. Powder Technology 207 (2011) 370. Derechos Reservados © 2017, SOMIM MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO 24] K. Harada, M. Murakami, AIP Conference Proceedings 823, 1677 (2006). 25] A.Vabre, M. Gmar, D. Lazaro, S. Legoupil, O. Coutier, A. Dazin, W.K. Lee, K. Fezza. Nuclear Instruments and Methods in Physics Research A 607(2009) 2015. 26] Y. Zhu, P. Jiang. Energy Conversion and Management 88(2014), 907. 27] D. Munday, E. Gutmark, J. Liu, K. Kailasanath, Physics of fluids 23(2011) 116102. 28] M.V. Srisha Rao, G. Jagadesh. Journal of the Indian Institute of Science 93 (2013)1. 29] R. Garcia, F. G. Hammitt, M. J. Robinson. Technical Report No. 1, Michigan. Univ., Ann Arbor. Coll. of Engineering (1964). 30] F. B. Peterson, T. P. Anderson. Physics of Fluids 10 (1967) 874. 31] C. Mishra, Y. Peles. Physics of Fluids 18(10), (2006) 103603. 32] P. Rudolf, M. Hudec, M. Gringer, D. Stefan. EPJ Web of Conferences 67(2014)02101. 33] G. Salque, P. Gajan, A. Strzelecki, J.P. Couput, L. ElHima. Int. Journal of Multiphase Flow 51(2013)87. 34] B. Yang, C. A. Tan. Journal of Applied Mechanics 1009(1992)59. 35] A. Prosperetti. Interface Focus 5:20150024. 36] GE Reisman, Y-C Wang, CE Brennen, J. Fluid Mech. 355(1998)255. ISSN 2448-5551 TF 26 Derechos Reservados © 2017, SOMIM