Conclusiones
Capítulo 4
Aplicación al Modelo de la Diabetes
Estructuras de Control Robusto en NCS
46
Introducción a la Diabetes Mellitus Tipo 1
4. APLICACIÓN AL MODELO DE LA DIABETES
Los estudios sobre los sistemas de control hormonales están implicados en la
regulación del metabolismo de la glucosa, lo cual permite obtener enormes ventajas
potenciales a fisiólogos y científicos. El funcionamiento eficiente de estos procesos
complejos, con su control de niveles múltiples, puede proporcionar un paradigma útil
para el científico. Igualmente, el malfuncionamiento de estos sistemas de control, da
lugar a los estados patológicos que son la preocupación del médico.
La insulina es el factor más importante para el proceso de la digestión, en el
cual se descomponen los alimentos para crear glucosa, la mayor fuente de combustible
para el cuerpo. Esta glucosa pasa a la sangre, donde la insulina favorece su entrada a las
células. Cuando la glucosa eleva su concentración, se estimula la secreción de la
insulina desde el páncreas. Esto conlleva un aumento en el nivel de insulina en sangre,
induciendo el ingreso de la glucosa al interior de las células de todos los tejidos. La
salida creciente de la insulina en la sangre y del líquido intersticial conduce a una
disminución de la concentración de la glucosa, que produce posteriormente una
reducción en la secreción de la insulina.
Este defecto de la insulina provoca que la glucosa se concentre en la sangre, de
forma que el cuerpo se ve privado de su principal fuente de energía. Además, los altos
niveles de glucosa en la sangre pueden dañar los vasos sanguíneos, los riñones y los
nervios. No existe una cura para la diabetes, por lo que el método de atención para
personas afectadas por este trastorno metabólico, es solo controlarlo, es decir, mantener
los niveles de glucosa en la sangre lo más cercanos posibles a los normales, vía
suministro externo de insulina. Un buen control puede ayudar a la prevención de
complicaciones de la diabetes relacionadas al corazón y el sistema circulatorio, los ojos,
riñones y nervios.
Los modelos matemáticos biológicos brindan características del comportamiento
de algunos procesos biológicos estudiados, en este caso de la regulación de glucosa en
el organismo humano (Modelo de Bergman), en las diferentes etapas del consumo diario
para el mantenimiento del equilibrio de concentraciones normales de glucosa e insulina.
4.1. Introducción a la Diabetes Mellitus Tipo 1
La diabetes es una alteración del metabolismo caracterizada por el aumento de
los niveles de glucosa en sangre (hiperglucemia), causada por un defecto (completo o
no) de la secreción o acción, de una hormona: la insulina. La insulina se produce en
unas formaciones especiales que se encuentran en el páncreas: los islotes de
Langerhans.
Los niveles de glucosa en la sangre se mantienen en las personas no diabéticas
dentro de unos límites normales muy estrechos, sobrepasando muy rara vez los 130
mg/dl, incluso cuando se han tomado alimentos muy ricos en azúcares ó grasas.
Esta estabilidad de la glucemia se debe a la existencia de un mecanismo
regulador extraordinariamente fino y sensible. Cuando una persona no diabética ingiere
alimentos, los azúcares que éstos contienen se absorben desde el intestino y pasan a la
Aplicación al Modelo de la Diabetes
47
Introducción a la Diabetes Mellitus Tipo 1
sangre, tendiendo a elevar los niveles de glucosa en esta. Tal tendencia a la elevación es
inmediatamente detectada por las células productoras de insulina que responden con una
secreción rápida de esta hormona. La insulina, a su vez, actúa como una llave que abre
las puertas de las células en los músculos, el tejido graso y el hígado, permitiendo la
entrada de glucosa y disminuyendo por tanto su nivel en la sangre. Todo este
mecanismo es muy rápido, no dando tiempo a que la glucemia se eleve. Una vez que la
glucosa ha entrado en los tejidos, es metabolizada y produce energía que es utilizada
para mantener las funciones de los órganos y su estructura.
En una persona con diabetes, la producción de la insulina está tan disminuida
que se altera todo el mecanismo regulador: las elevaciones de la glucosa sanguínea no
son seguidas por un aumento suficiente de la insulina, la glucosa no puede penetrar en
las células y su cantidad continúa elevándose. Como consecuencia, las células, faltas de
combustible, no producen energía suficiente y alteran sus funciones. Esta falta de
energía es la razón de que un diabético mal controlado pueda sentirse débil, sin fuerza
(astenia). Por el mismo motivo, las células se encuentran hambrientas, siendo esta la
razón de que una persona con diabetes no controlada pueda sentir hambre (polifagia).
Puesto que no puede recibirse energía de los azucares, el organismo intenta
obtenerla a partir de las grasas, produciéndose una movilización de las que se
encuentran almacenadas en el tejido adiposo. Esta es una de la razones del posible
adelgazamiento del diabético no controlado.
Debido a los altos niveles de la glucosa en la sangre, el riñón, que actúa como un
filtro para esta, recibe una notable sobrecarga de glucosa. Como la capacidad del riñón
para concentrarla es limitada, se ve obligado a diluirla utilizando agua del organismo.
Esta situación conduce a una cierta deshidratación que se percibe por el diabético como
un aumento de la sensación de sed (polidipsia). Por otra parte, el aumento de la
eliminación de agua hace que las personas con diabetes no controlada puedan orinar
más de lo normal (poliuria).
De este modo, se observa como el aumento de la glucosa en la sangre, debido a
la falta de insulina, conduce a los que se consideran como síntomas cardinales de la
diabetes: poliuria, polidipsia, polifagia, adelgazamiento y astenia.
4.1.1. Tipos de diabetes
Se pueden distinguir dos tipos de diabetes:
·
Diabetes Mellitus Tipo 1: Resultante de la destrucción de tipo
autoinmunitaria de las células beta del páncreas.
·
Diabetes Mellitus Tipo 2: Acompaña a individuos que presentan
resistencia a la insulina y usualmente tienen una relativa deficiencia
insulínica.
De forma muy esquemática se puede resumir las "diversas diabetes" en función
de cuántos de los siguientes factores coincidan y en función de en qué medida lo hagan.
Aplicación al Modelo de la Diabetes
48
Introducción a la Diabetes Mellitus Tipo 1
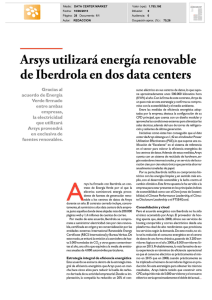
Figura 4.1.1-1: Tipos de Diabetes Mellitus
Sabiendo que a la glucosa que circula por la sangre se le llama glucemia, en la
Fig. 4.1.1-2, se puede observar un esquema con los distintos valores de glucosa en
sangre:
Figura 4.1.1-2: Valores típicos de glucosa en sangre
Todas las células del cuerpo necesitan energía para estar en activo, mantener las
funciones vitales (como el latido cardíaco, movimientos digestivos, respiración...) y
además mantener la temperatura corporal y los movimientos musculares. La glucosa es
la principal fuente de energía para el cuerpo humano, como la gasolina lo es para
mantener el motor del automóvil en marcha.
Aplicación al Modelo de la Diabetes
49
Introducción a la Diabetes Mellitus Tipo 1
4.1.2. Conceptos fundamentales
Entre los conceptos más importantes de la Diabetes Mellitus, se pueden destacar
los siguientes: hipoglucemia, hiperglucemia e insulina.
Estos conceptos son descritos a continuación.
4.1.2.1. Hipoglucemia
Cuando los niveles de glucosa en sangre están por debajo de la normalidad se
produce una Hipoglucemia:
Hipo = bajo
glucemia = glucosa en sangre
En general, se empiezan a sentir las manifestaciones físicas de falta de glucosa
cuando el nivel de glucemia está en 55 mg/dl o menos, cifra por debajo de la cual
empiezan los síntomas o "señales de alerta", aunque la sensibilidad y/o percepción de
los mismos es diferente para cada persona. Las "señales de alerta" más frecuentes son:
§
§
§
§
§
§
§
§
§
Sudoración (sin calor)
Sensación de hambre de aparición brusca
Debilidad
Palidez
Sensación de mareo
Temblores y nerviosismo
Palpitaciones
Alteraciones del comportamiento
Irritabilidad
Si no se corrige rápidamente esta situación pueden aparecer: visión borrosa,
dificultad para hablar, confusión mental y pérdida del conocimiento (coma
hipoglucémico).
Los síntomas de hipoglucemia no aparecen todos por igual, cada persona debe
aprender a identificar sus propias señales de alerta.
Cuando la glucosa escasea, el cerebro y las células del tejido nervioso no pueden
ser nutridas normalmente, entonces el organismo activa una serie de mecanismos para
protegerse de la situación de peligro y para advertir al individuo que debe actuar con
rapidez. Se produce la elevación de una serie de hormonas como la adrenalina, el
glucagón, el cortisol... con la finalidad de movilizar las reservas de glucosa que existen
fundamentalmente en el hígado.
Por ello, el glucagón es la hormona producida en las células alfa, con efecto
opuesto al de la insulina, es decir, actúa sobre el glucógeno del hígado liberando la
glucosa al torrente sanguíneo.
Aplicación al Modelo de la Diabetes
50
Introducción a la Diabetes Mellitus Tipo 1
4.1.2.2. Hiperglucemia
Cuando los valores de glucosa en sangre se encuentran elevados se produce una
Hiperglucemia.
Hiper = gran
glucemia = glucosa en sangre
La hiperglucemia es indolora, de implantación progresiva y muchas veces pasa
inadvertida en los primeros estadíos.
Pueden darse dos tipos de situaciones:
I.
II.
Hiperglucemia brusca o aguda.
Hiperglucemia sostenida o crónica.
En la hiperglucemia brusca o aguda, en pocos días la glucemia llega a valores de
250 mg/dl, o más. Después del ayuno y el descanso nocturno, algunas veces a mucho
más. Síntomas o señales de alerta:
·
·
·
·
·
·
Ganas de orinar con frecuencia y hacer micciones muy largas (poliuria)
Mucha sed (polidipsia)
Hambre (polifagia)
Fatiga
Aliento con olor a acetona (halitosis cetósica)
Olor de acetona en la orina
4.1.2.3. Insulina
La insulina es una hormona del aparato digestivo que tiene la misión de facilitar
que la glucosa que circula en la sangre penetre en las células y sea aprovechada como
energía.
La insulina se produce en el páncreas, concretamente en las células betapancreáticas. El páncreas es una glándula situada detrás del estómago, al mismo nivel
que el hígado, pero en la parte izquierda de la cintura. Cuando se empieza a comer
alimentos que contienen hidratos de carbono, se activan unos sensores y el páncreas
empieza a producir insulina que libera directamente a la sangre.
Para que la insulina sea efectiva deben cumplirse dos condiciones:
a) que el páncreas segregue insulina en cantidad suficiente.
b) que las células la identifiquen y permitan su acción.
4.1.3. Datos relevantes
Finalizando con esta breve introducción, cabe destacar dos datos bastante
relevantes:
·
Los estudios científicos actuales, permiten predecir el escenario de la
diabetes en el próximo siglo:
Aplicación al Modelo de la Diabetes
51
Modelo de la Diabetes Mellitus Tipo 1
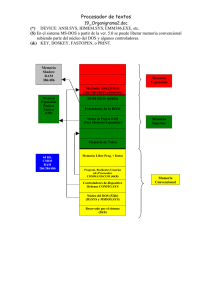
Figura 4.1.3-1: Estimación de la evolución de la Diabetes en España
·
La Organización Mundial de la Salud, publicó un informe titulado:
"Global Burden of Diabetes 1995-2025: Prevalence, Numerical
Estimates and Projections” (Impacto global de la Diabetes 1995-2025:
Prevalencia, Estimaciones cuantitativas y Previsiones futuras). En este
informe y, basándose en los datos epidemiológicos disponibles en la
actualidad, se estiman una serie de predicciones. De ellas, la notación de
mayor relevancia es: Actualmente hay aproximadamente 143 millones de
personas con Diabetes en todo el mundo. Está previsto que esta cifra se
eleve a 300 millones para el año 2025 debido, sobre todo, al aumento,
envejecimiento y urbanización de la población.
4.2. Modelo de la Diabetes Mellitus Tipo 1
El modelo que se va a utilizar para definir el sistema gluco-regulatorio es el
llamado Modelo de Bergman. En primer lugar se presentará el modelo formado por sus
ecuaciones diferenciales no lineales. Posteriormente, se simplificará dicho modelo
mediante la linealización del mismo entorno a un punto de equilibrio.
4.2.1. Definición del modelo no lineal
El Modelo de Bergman, que se va a emplear en este trabajo, viene descrito por
las siguientes ecuaciones diferenciales no lineales, descritas en Bergman et al. (1981):
ௗீ
ௗ௧
ௗூ
ௗ௧
ௗ
ௗ௧
ൌ െܲଵ ܩെ ܺሺ ܩ ܩ ሻ ܦሺݐሻ
ൌ െ݊ሺ ܫ ܫ ሻ ൌ െܲଶ ܺ ܲଷ ܫ
ܦሺ ݐሻ ൌ ሺ௧ሻ
భ
Ec. (4.2.1-1)
Ec. (4.2.1-2)
Ec. (4.2.1-3)
ି ݁ݐ ீܣ ீܦ௧Ȁ௧ೌೣǡ
ଶ
ܸீ ݐ௫ǡீ
Aplicación al Modelo de la Diabetes
52
Modelo de la Diabetes Mellitus Tipo 1
donde:
-
G(t) es la concentración de glucosa en plasma (mmol/L).
I(t) es la concentración en plasma de la insulina (mU/L).
X(t) es proporcional a la concentración de insulina en plasma en el
compartimiento remoto (min-1).
D(t) es la perturbación de la glucosa ocasionado por la comida
(mmol/Lmin-1).
U(t) es el flujo de infusión de insulina exógena (mU/min).
Un paciente común se puede representar de forma aceptable proporcionando los
siguientes valores a los parámetros del modelo:
Ø
Ø
Ø
Ø
Ø
Ø
Ø
Ø
Ø
Ø
P1=0.028 min-1
P2=0.025 min-1
P3=0.000013 L/mU min2
VI=12 L, y n=5/54 min-1
AG=0.8 Adimensional
Tmax,G=40 min
Tmax,I=55 min
VG=13.79 L
Ib=15 mU/L
Gb = 4.5 mmol/L
Para construir este modelo se han empleado las herramientas Matlab y Simulink,
donde se han implementado las ecuaciones del modelo descrito por medio de funciones
y bloques, descritas en Barragán et al. (2010).
El modelo creado en Simulink, llamado Modelo de Bergman No Lineal, está
construido en el siguiente bloque:
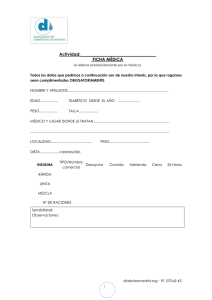
Figura 4.2.1-1: Bloque de Simulink que contiene el
Modelo de Bergman no lineal
A su vez, el bloque de la Fig. 4.2.1-1 estará formado por
elementos:
Aplicación al Modelo de la Diabetes
los siguientes
53
Modelo de la Diabetes Mellitus Tipo 1
Figura 4.2.1-2: Modelo de Bergman no lineal detallado
En el interior del bloque que aquí aparece, se encuentran implementadas las
ecuaciones diferenciales no lineales del Modelo de Bergman vistas al comienzo de este
apartado: Ec. (4.2.1-1), Ec. (4.2.1-2) y Ec. (4.2.1-3).
4.2.2. Linealización del modelo
A partir de las ecuaciones diferenciales que describen al sistema, para el
desarrollo de los controladores se representa el mismo en función de las ecuaciones de
estado:
ܽଵଵ
ݔଵሶ
ڭ൩ ൌ ڭ
ܽଵ
ݔሶ
ܿଵଵ
ݕଵ
ڭ൩ ൌ ڭ
ݕ
ܿଵ
ݔଵ
ܽ ڮଵ
ܾଵଵ
ڰ
ڭ൩ ڭ൩ ڭ
ݔ
ܽ ڮ
ܾଵ
ڮ
ڰ
ڮ
ݔଵ
ܿଵ
݀ଵଵ
ڭ൩ ڭ൩ ڭ
ܿ
ݔ
݀ଵ
ڮ
ڰ
ڮ
ڮ
ڰ
ڮ
ݑଵ
ܾଵ
ڭ൩ ڭ൩
ݑ
ܾ
ݑଵ
݀ଵ
ڭ൩ ڭ൩
ݑ
݀
Procediendo con la linealización de Ec. (4.2.1-1), Ec. (4.2.1-2) y Ec. (4.2.1-3), se
obtienen las siguientes ecuaciones en derivadas parciales:
ࡱ ൌ con
݀ܩ
ൌ െܲଵ ܩെ ܺ ሺ ܩ ܩ ሻ ܦሺݐሻ
݀ݐ
߲ࡱ
ൌ െܲଵ െ ܺ
߲ܩ
߲ࡱ
ൌ െܩ െ ܩ
߲ܺ
߲ࡱ
ൌͳ
߲ܦ
Aplicación al Modelo de la Diabetes
54
Modelo de la Diabetes Mellitus Tipo 1
ࡱ ൌ con
݀ܫ
ܷሺݐሻ
ൌ െ݊ሺ ܫ ܫ ሻ ݀ݐ
ܸଵ
߲ࡱ
ൌ െ݊
߲ܫ
ͳ
߲ࡱ
ൌ
ܸଵ
߲ܷ
ࡱ ൌ con
݀ܺ
ൌ െܲଶ ܺ ܲଷ ܫ
݀ݐ
߲ࡱ
ൌ െܲଶ
߲ܺ
߲ࡱ
ൌ ܲଷ
߲ܫ
Agrupando los términos obtenidos mediante las derivadas parciales, el modelo
linealizado en torno al punto de equilibrio (X0, G0) queda definido mediante:
െܲଵ െ ܺ
Ͳ
ܣൌ
Ͳ
ܥൌ ሾͳ
Ͳ
െ݊
ܲଷ
Ͳ
െܩ െ ܩ
ͳ
Ͳ
൩ ܤൌ ൦
ܸଵ
െܲଶ
Ͳ
Ͳ
Ͳ Ͳሿ ܦൌ ቂ ቃ
Ͳ
ͳ
Ͳ൪
Ͳ
Se pretende realizar un control del mismo en torno a un punto de equilibrio dado
por X0=G0=0, por lo que para obtener los controladores, se debe linealizar el sistema en
torno a dicho punto:
െܲଵ
ܣൌ Ͳ
Ͳ
ܥൌ ሾͳ Ͳ
Aplicación al Modelo de la Diabetes
Ͳ
െ݊
ܲଷ
Ͳ
െܩ
ͳ
Ͳ ൩ ܤൌ ൦
ܸଵ
െܲଶ
Ͳ
Ͳ
Ͳሿ ܦൌ ቂ ቃ
Ͳ
ͳ
Ͳ൪
Ͳ
55
Modelo de la Diabetes Mellitus Tipo 1
De esta forma, el modelo de la diabetes en el punto de equilibrio dado
anteriormente queda como sigue:
െܲଵ
ܩሶ
ܫሶ ൩ ൌ Ͳ
Ͳ
ܺሶ
donde:
ݕൌ ሾͳ
Ͳ
െ݊
ܲଷ
Ͳ
െܩ
ܩ
ͳ
Ͳ ൩ ܫ൩ ൦
ܸଵ
െܲଶ
ܺ
Ͳ
Ͳ Ͳሿ ܩ ሾͲ
ݑଵ
Ͳሿ ቂ ݑቃ
ͳ
ݑଵ
Ͳ൪ቂ ݑቃ
Ͳ
ଶ
ଶ
ݑଵ
ܷ െ ܷ
ቂ ݑቃ ൌ ቂ
ቃ
ଶ
ܦെͲ
Siendo Ub = 16.66667 mU/min la insulina necesaria para mantener el equilibrio
en torno a dicho punto de funcionamiento.
El modelo creado en Simulink, llamado Modelo de Bergman Lineal, está
construido en el siguiente bloque:
Figura 4.2.2-1: Bloque de Simulink que contiene el
Modelo de Bergman lineal
Dicho bloque, a su vez, está formado por los siguientes elementos:
Figura 4.2.2-2: Modelo de Bergman lineal detallado
El interior del bloque State-Space, hace referencia a las ecuaciones del Modelo
de Bergman linealizado, las cuales se encuentran definidas en el fichero de Matlab
llamado Modelo de Bergman Lineal.
Aplicación al Modelo de la Diabetes
56
Aplicación de la estrategia de control robusto para NCS
4.2.3. Comparación Modelo Lineal vs Modelo No Lineal
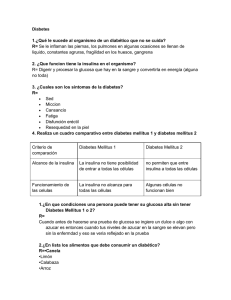
Mediante la Fig. 4.2.3-1, basada en el fichero de Simulink Comparacion_
Modelo_Lineal_Vs_No_Lineal.mdl, se pretende demostrar como la linealización del
Modelo de Bergman dado por la Fig. 4.2.2-1, y calculado en el punto de equilibrio
descrito previamente, representa de una forma muy fiable al modelo basado en
ecuaciones diferenciales no lineales dado por la Fig. 4.2.1-1 para entradas en escalón
(inyecciones de insulina) en torno a dicho punto de equilibrio.
Figura 4.2.3-1: Comparación Modelo Lineal vs Modelo No Lineal
Es por ello, que por simplicidad de cálculo se trabajará más fácilmente con el
Modelo de Bergman linealizado, pudiéndose diseñar controladores robustos lineales sin
una notable pérdida de eficacia cuando trabajan en torno al punto de equilibrio del
modelo linealizado.
4.3. Aplicación de la estrategia de control robusto para NCS
Una vez identificado el modelo de gluco-regulatorio, se pueden aplicar las
distintas estructuras de control, presentadas en el capítulo anterior, que permiten regular
la cantidad de glucosa en sangre. Para ello se hará uso de un sistema basado en redes de
comunicación como el representado en la Fig. 4.3-1.
Figura 4.3-1: Sistema de control robusto para monitorización y control
de la glucosa en un paciente con Diabetes Mellitus Tipo 1
haciendo uso de redes de comunicación
Aplicación al Modelo de la Diabetes
57
Aplicación de la estrategia de control robusto para NCS
En el mismo se dispondrá de un paciente, que será nuestra planta dada por las
ecuaciones del Modelo de Bergman, un sensor que dará una lectura de la glucosa en
sangre, una bomba de insulina (actuador), encargada de inyectar insulina vía
intravenosa para regular la glucosa en sangre, y una red de comunicación a través de la
cual se conectará un controlador que proporcionará la cantidad de insulina que es
necesaria inyectar en el paciente gracias a la realimentación obtenida. Por simplicidad,
la dinámica del actuador no será tenida en cuenta.
Debido a la aplicación de monitorización y control de la glucosa que se pretende
implementar, y a la capacidad de autonomía por parte del paciente que transporta la
bomba de insulina, la necesidad de uso de un sistema inalámbrico de comunicaciones se
hace indispensable, tal y como se presenta en la Fig. 4.3-2.
Figura 4.3-2: Aplicación inalámbrica de un sistema de control robusto
para monitorización y control de la glucosa en un
paciente con Diabetes Mellitus Tipo 1
En los siguientes apartados se presentan las distintas estructuras de control
robusto, introducidas en el capítulo anterior, que han sido implementadas para la
monitorización y control, a través de redes de comunicación, de la glucosa en sangre en
pacientes con Diabetes Mellitus Tipo 1. Otros trabajos basados en técnicas de control
H∞ son estudiados en Parker et al. (2000), Kamath et al. (2002) y en Kovacs et al.
(2007). Otro trabajo basado en la técnica de control predictivo basado en modelo es
presentado en Dua et al. (2006). Por último, técnicas de control basadas en PID y
control borroso se presentan en Chen et al. (2007). Todas ellas, con el Modelo de
Bergman como definición del sistema gluco-regulatorio.
Los resultados de las simulaciones realizadas serán mostrados y analizados en el
Capítulo 5.
Aplicación al Modelo de la Diabetes
58
Aplicación de la estrategia de control robusto para NCS
4.3.1. Implementación con controlador de 2 g.d.l. de síntesis escalonada
En el Apartado 3.1, se presentó una estructura de control basada en el diseño de
un controlador robusto de 2 g.d.l. para NCS mediante una síntesis escalonada del
mismo. Se muestra ahora la implementación de dicha técnica de control en el modelo de
la Diabetes Mellitus Tipo 1.
Se comienza presentando el fichero de Matlab con el diseño de los controladores
de 1 g.d.l. correspondientes a cada fase y posteriormente se muestran los esquemas de
Simulink tanto para las simulaciones del controlador para las incertidumbres del modelo
de la planta (lineal y no lineal), como para el posterior controlador de la red de
comunicación (modelo equivalente y real).
4.3.1.1. Diseño de los controladores
Comenzando con la síntesis del controlador robusto que actúa sobre las
incertidumbres en el modelo de la planta, es necesario proporcionarle a la función
hinfsyn, contenida en el µ-Analysis and Synthesis Toolbox de Matlab, la planta
aumentada definida en el Apartado 3.1, la cual, teniendo en cuenta el esquema de
control de la Fig. 3.1.1-1, se puede calcular mediante la función sysic:
systemnames = 'Planta_sys Ws_sys Wt_sys Wks_sys';
inputvar = '[ref(1); control(1)]';
outputvar = '[Ws_sys; Wt_sys; Wks_sys; ref - Planta_sys]';
input_to_Planta_sys = '[control]';
input_to_Ws_sys = '[ref - Planta_sys]';
input_to_Wt_sys = '[Planta_sys]';
input_to_Wks_sys = '[control]';
sysoutname = 'Planta_aumentada';
cleanupsysic = 'yes';
sysic
Una vez calculado el controlador anterior, se procede con la síntesis del
controlador que actué sobre la red de comunicación haciendo uso de la función h2syn
contenida en el µ-Analysis and Synthesis Toolbox de Matlab, por lo que teniendo en
cuenta el esquema de control presentado en la Fig. 3.1.2-1, se define la función sysic de
la siguiente forma:
systemnames = 'Planta_sys P_sys';
inputvar = '[q{1}; control{1}]';
outputvar = '[P_sys; q - P_sys]';
input_to_Planta_sys = '[control]';
input_to_P_sys = '[Planta_sys]';
sysoutname = 'Planta_aumentada';
cleanupsysic = 'yes';
sysic
Métodos adicionales para el cálculo de la planta aumentada se pueden encontrar
en Allgwer (2009).
Aplicación al Modelo de la Diabetes
59
Aplicación de la estrategia de control robusto para NCS
4.3.1.2. Simulaciones del NCS
Las simulaciones necesarias para estudiar el comportamiento del sistema
mediante los controladores robustos lineales diseñados son mostradas en este apartado.
Así, introduciendo el Modelo de Bergman No Lineal, basado en ecuaciones
diferenciales no lineales de la Fig. 4.2.1-1, y Modelo Real Red Comunicación dado por
la Fig. 4.3.1.2-3, en las estructuras de control para NCS con controlador de 2 g.d.l. de
síntesis escalonada, representadas en las Fig. 3.1.1-1 y Fig. 3.1.2-1, respectivamente, se
obtienen los diagramas de bloques en Simulink dados por las Fig. 4.3.1.2-1 y Fig.
4.3.1.2-2.
Figura 4.3.1.2-1: Implementación de NCS con controlador de 2 g.d.l. de síntesis
escalonada para el las incertidumbres del modelo de la planta
definido por el Modelo de Bergman no lineal
Figura 4.3.1.2-2: Implementación de NCS con controlador de 2 g.d.l. de síntesis
escalonada para los problemas generados en la red de comunicación real
Aplicación al Modelo de la Diabetes
60
Aplicación de la estrategia de control robusto para NCS
Los bloques Comida (perturbaciones del sistema en forma de ingesta de
comidas) y Saturacion (referente a la saturación del controlador) que aparecen en el
diagrama de Simulink correspondiente a la Fig. 4.3.1.2-1, y en general en el resto de
simulaciones, serán explicados en el siguiente capítulo.
Figura 4.3.1.2-3: Bloque de Simulink correspondiente al
modelo real de la red de comunicación
Los diagramas de las figuras anteriores pueden ser referidos para el modelo
lineal y la red equivalente sin más que sustituir los bloques Modelo de Bergman No
Lineal y Modelo Real Red Comunicación por los bloques Modelo de Bergman Lineal de
la Fig. 4.2.2-1 y Modelo Equivalente Red Comunicación dado por la Fig. 2.2.2.2-1,
respectivamente.
4.3.2. Implementación con controlador robusto de 2 g.d.l.
En este apartado se presenta la implementación del NCS basado en el diseño de
un controlador robusto de 2 g.d.l., ya estudiado en el Apartado 3.2, en la aplicación
inalámbrica que permite controlar y monitorizar el nivel de glucosa en sangre.
En primer lugar se define el fichero de Matlab en el que se ha diseñado el
controlador robusto lineal de 2 g.d.l. para NCS.
Posteriormente, se presenta el diagrama de bloques de Simulink que permite
probar dicho controlador tanto en el esquema de control basado en el NCS equivalente y
en el Modelo de Bergman lineal, como en el esquema de control basado en el NCS real
y en el Modelo de Bergman no lineal.
4.3.2.1. Diseño del controlador
Para realizar la síntesis del controlador es necesario proporcionarle a la función
hinfmix contenida en el µ-Analysis and Synthesis Toolbox de Matlab, la planta
aumentada, la cual ya fue calculada cuando se presentó esta técnica de control robusto
en el Apartado 3.2. En este caso, la planta será introducida mediante la función sysic, la
cual quedará definida como sigue:
Aplicación al Modelo de la Diabetes
61
Aplicación de la estrategia de control robusto para NCS
systemnames = 'Planta_sys Ws_sys Wt_sys Wks_sys P_sys';
inputvar = '[ref{1}; q{1}; control{2}]';
outputvar = '[Ws_sys;Wt_sys;Wks_sys;P_sys;ref-control(2);P_sys+q]';
input_to_Planta_sys = '[control(1)]';
input_to_Ws_sys = '[ref - Planta_sys]';
input_to_Wt_sys = '[control(2)]';
input_to_Wks_sys = '[control(1)]';
input_to_P_sys = '[Planta_sys]';
sysoutname = 'Planta_aumentada';
cleanupsysic = 'yes';
sysic
De esta forma, estableciendo las relaciones existentes entre los distintos bloques
y señales del esquema de control de la Fig. 3.2-1, se genera la planta aumentada.
Resulta interesante destacar el método de obtención de los controladores de
1.g.d.l., K1(z) y K2(z), a partir del controlador robusto de 2 g.d.l., K(z), calculado
mediante la función hinfmix. Para ello, una vez obtenido y analizado el controlador K(z),
se observa que tiene la siguiente estructura:
K(z) = [K11(z) K12(z); 0 0]
Por lo que las salidas de los controladores estarán definidas como:
[u1; u2] = [K11(z) K12(z); 0 0] [m1; m2]
De esta ecuación, se tiene obtiene lo siguiente:
u1 = K11(z) m1 + K12(z) m2
u2 = 0
Ec. (4.3.2.1-1)
Ec. (4.3.2.1-2)
Por otra parte, de la estructura de control representada en la Fig. 3.1-1, se tiene
demuestra que:
m1 = r - u2
Ec. (4.3.2.1-3)
Así, de las ecuaciones Ec. (4.3.2.1-1), Ec. (4.3.2.1-2) y Ec. (4.3.2.1-3) se puede
deducir lo siguiente:
u1 = K11(z) r + K12(z) m2
u1 = K11(z) [r + K12(z)/K11(z) m2]
Por lo que para dividir el controlador K(z) en los controladores K1(z) y K2(z), de
forma que sea coherente con la estructura de control del la Fig. 3.1-1, que cumple:
u1 = K1(z) [r - K2(z) m2]
Los siguientes cambios deberán ser realizados:
K1(z) = K11(z)
K2(z) = - K12(z)/K11(z)
Aplicación al Modelo de la Diabetes
62
Aplicación de la estrategia de control robusto para NCS
4.3.2.2. Simulaciones del NCS
Insertando el Modelo de Bergman linealizado de la Fig. 4.2.2-1, junto con el
modelo equivalente de la red de comunicación descrito en la Fig. 2.2.2.2-1, en la
estructura de control para NCS con controlador robusto de 2 g.d.l. representada en la
Fig. 3.2-1, y añadiendo un mantenedor de orden cero para el muestreo del sistema
discreto, se obtiene el diagrama de bloques en Simulink, dado por la Fig. 4.3.2.2-1, que
permite realizar la simulación del sistema.
Figura 4.3.2.2-1: Implementación de NCS con controlador robusto de 2 g.d.l.
mediante un esquema de control basado en NCS equivalente y
Modelo de Bergman lineal
El bloque de Simulink llamado Modelo Equivalente Red Comunicación de la
Fig. 4.3.2.2-1 está formado por:
Figura 4.3.2.2-2: Bloque de Simulink correspondiente al
modelo equivalente de la red de comunicación
Por otra parte, sustituyendo en la Fig. 4.3.2.2-1, el bloque Modelo de Bergman
Lineal por el bloque Modelo de Bergman No Lineal, basado en ecuaciones diferenciales
no lineales de la Fig. 4.2.1-1, y el bloque Modelo Equivalente Red Comunicación por el
bloque Modelo Real Red Comunicación dado por la Fig. 4.3.1.2-3 y descrito en la Fig.
2.2.1.2-1, se puede probar la efectividad del controlador lineal diseñado, y probado
previamente en el modelo lineal, en el modelo real (no lineal), tal y como se representa
en la Fig. 4.3.2.2-3.
Aplicación al Modelo de la Diabetes
63
Aplicación de la estrategia de control robusto para NCS
Figura 4.3.2.2-3: Implementación de NCS con controlador robusto de 2 g.d.l.
mediante un esquema de control basado en NCS real y
Modelo de Bergman no lineal
Para mejorar el control del sistema se incluye el término anti-windup, como se
puede ver en la Fig. 4.3.2.2-4, el cual tiene la función de evitar que el término integral
incremente su valor, fuera de determinados límites, cuando hay un error sostenido
debido a la saturación del controlador. Esto puede provocar que la actuación se
produzca con cierto retraso, dado que se tiene que contrarrestar el término integrado.
Mediante esta técnica se consigue mejorar el control, disminuyendo la sobreoscilación o
disminuyendo el tiempo de respuesta. La técnica se basa en la realimentación del error
de saturación con un efecto integral Tt añadiéndolo a la actuación del controlador
calculado.
Figura 4.3.2.2-4: Implementación de NCS con controlador robusto de 2 g.d.l.
mediante un esquema de control basado en NCS real y
Modelo de Bergman no lineal con anti-windup
Aplicación al Modelo de la Diabetes
64
Aplicación de la estrategia de control robusto para NCS
4.3.3. Implementación con compensador para pérdida de datos
Se implementa la última técnica de control robusto aplicada a NCS, vista en el
Apartado 3.3, donde se busca introducir el Modelo de Bergman en el esquema de
control NCS basado en el diseño de un compensador que actúe sobre las pérdidas de
datos que se producen en la red de comunicaciones.
Al igual que se ha realizado con las dos técnicas anteriores, se describirá en
primer lugar como se diseña el compensador usando las funciones contenidas en el µAnalysis and Synthesis Toolbox de Matlab, y a continuación, se representan los
esquemas para las distintas simulaciones creados mediante Simulink.
4.3.3.1. Diseño del compensador
La síntesis del compensador se realizará mediante la función hinfmix contenida
en el µ-Analysis and Synthesis Toolbox de Matlab, proporcionándole la planta
aumentada, ya calculada en el Apartado 3.3 a partir de la Fig. 3.3-4, mediante la función
sysic descrita a continuación:
systemnames = 'Planta_sys Wt_sys Ws_sys Wks_sys P_sys z_sys';
inputvar = '[ref{1}; control{2}]';
outputvar = '[Ws_sys; Wt_sys; Wks_sys; P_sys; ref - control(2) P_sys; z_sys]';
input_to_Planta_sys = '[control(1)]';
input_to_Ws_sys = '[ref - Planta_sys]';
input_to_Wt_sys = '[control(2) + P_sys]';
input_to_Wks_sys = '[control(1)]';
input_to_P_sys = '[Planta_sys]';
input_to_z_sys = '[Planta_sys]';
sysoutname = 'Planta_aumentada';
cleanupsysic = 'yes';
sysic
Al igual que en el Apartado 4.3.2.1, se comenta aquí el método de obtención de
los controladores, K1(z) y K2(z), a partir del controlador robusto de 2 g.d.l., K(z),
calculado mediante la función hinfmix.
Del esquema de control de la Fig. 3.3-4, se puede obtener la siguiente ecuación:
m1 = r - u2 - q - Py
Ec. (4.3.3.1-1)
Por lo que teniendo en cuenta las ecuaciones Ec. (4.3.2.1-1), Ec. (4.3.2.1-2) y
Ec. (4.3.3.1-1) se puede deducir lo siguiente:
u1 = K11(z) (r - q - P y) + K12(z) m2
u1 = K11(z) [r - q - P y + K12(z)/K11(z) m2]
Observando de nuevo la estructura de control de la Fig. 3.3-4, se deduce que la
señal de control u1 debe ser:
u1 = K1(z) [r - q - P y - K2(z) m2]
Aplicación al Modelo de la Diabetes
65
Aplicación de la estrategia de control robusto para NCS
Por lo que para descomponer el controlador K(z) en los controladores K1(z) y
K2(z), se deben realizar los siguientes cambios:
K1(z) = K11(z)
K2(z) = - K12(z)/K11(z)
4.3.3.2. Simulaciones del NCS
El diagrama de bloques en Simulink mostrado en la Fig. 4.3.3.2-1, que permite
realizar la simulación del sistema, se ha creado a partir de la estructura de control
robusto para NCS con compensador para la pérdida de datos en la red representada en la
Fig. 3.3-4, en la cual se ha introducido el Modelo de Bergman linealizado de la Fig.
4.2.2-1, junto con el modelo equivalente de la red de comunicación descrito en la Fig.
4.3.2.2-2.
Figura 4.3.3.2-1: Implementación de NCS con compensador para pérdida de datos
mediante un esquema de control basado en NCS equivalente y
Modelo de Bergman lineal
Si se sustituye en la Fig. 4.3.3.2-1, el bloque Modelo de Bergman Lineal por el
bloque Modelo de Bergman No Lineal de la Fig. 4.2.1-1, y el bloque Modelo
Equivalente Red Comunicación por el bloque Modelo Real Red Comunicación de la
Fig. 4.3.1.2-3, se puede comprobar el funcionamiento del compensador lineal diseñado,
y probado previamente en el modelo lineal, en el modelo real basado en ecuaciones
diferenciales no lineales. Si además se incluyen el anti-windup para atenuar los efectos
de la saturación del controlador, se obtiene el siguiente esquema de control de la Fig.
4.3.3.2-2.
Aplicación al Modelo de la Diabetes
66
Conclusiones
Figura 4.3.3.2-2: Implementación de NCS con compensador para pérdida
de datos mediante un esquema de control basado en NCS real y
Modelo de Bergman no lineal con anti-windup
4.4. Conclusiones
En el capítulo anterior se han presentado una serie de técnicas de control robusto
para NCS, proporcionando las formulaciones necesarias para ser aplicadas a un modelo
generalizado. Es en este capítulo donde se han implementado las técnicas anteriormente
estudiadas, escogiendo para ello el modelo de la Diabetes Mellitus.
Así, se ha proporcionado una visión general del trastorno metabólico conocido
como Diabetes Mellitus, y más concretamente sobre su variante Tipo 1. De esta forma,
conceptos como hipoglucemia, hiperglucemia e insulina, además de los valores típicos
en los que deben moverse los parámetros asociados a este sistema, han sido estudiados
para proporcionar un mayor conocimiento que permita diseñar un control eficiente del
sistema.
Se ha utilizado el Modelo de Bergman, pues permite estudiar y controlar un
sistema de tal complejidad reduciendo las variables implicadas a su mínima expresión,
lo cual reduce la potencia de cálculo necesaria para el controlador. Por tanto, partiendo
de un modelo basado en ecuaciones diferenciales no lineales, se ha conseguido
linealizar el mismo en torno a un punto de equilibrio para aplicar las estructuras de
control robusto sobre NCS vistas en el capítulo anterior.
Aplicación al Modelo de la Diabetes
67
Conclusiones
Por último, se han comentado los aspectos más destacables de los ficheros
implementados en Matlab para el diseño de los controladores, así como los esquemas
para la ejecución de las simulaciones realizadas mediante Simulink para las distintas
técnicas de control robusto aplicadas a NCS.
Los resultados obtenidos, incluyendo perturbaciones en forma de ingesta de
comidas y saturación de los controladores, en el NCS real y empleando el Modelo de
Bergman, basado en ecuaciones diferenciales no lineales, son presentados y analizados
en el siguiente capítulo.
Aplicación al Modelo de la Diabetes
68