")
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Sesión # 1 MODELOS Y VARIABLES DE ESTADO
Objetivos:
1.
2.
3.
4.
5.
6.
Definir y clasificar sistemas
Definir las etapas para el estudio de sistemas
Plantear un ejemplo de descripción de un sistema.
Establecer relaciones entre las representaciones de sistemas
Definir variables de estado.
Plantear las ecuaciones de estado: circuitos eléctricos.
Referencias: El material ha sido parcialmente tomado de:
1. DORF Richard and BISHOP Robert. Modern Control Systems. 10th Edition.
Upper Saddle River: Pearson Prentice Hall. 2005. Sections: 2-2, 2-3, 2-4,
2-5, 3-1, 3-2, 3-3, 3.6.
2. CHEN Chi-Tsong. Linear Systems Theory and Design. 3rd Edition. New
York: Oxford University Press. 1999. Sections: 2-1, 2-2, 2-3, 2-5.
Temas para lectura previa:
1. Definición de Sistema, desde el punto de vista de ingeniería.
2. Concepto de sistema dinámico y sistema estático.
3. Concepto de sistemas con memoria y sin memoria.
4. Definiciones de: causalidad, concentración y distribución.
5. Definiciones de sistema continuo y discreto.
6. Definición de Linealidad – no linealidad
7. Definición de Variante – Invariante con el tiempo.
8. Etapas para el estudio de sistemas.
9. Clasificación de variables pasantes y transversales.
10. Definiciones de potencia y energía.
11. Descripción entrada-salida: integral de convolución y función de transferencia.
12. Descripción en el espacio de estado.
13. Función de transferencia a partir de la representación de estado.
14. Definir estado de un sistema.
15. Identificar las variables de estado en un sistema eléctrico.
16. Ecuaciones de estado sistema lineal e invariante.
17. Ecuaciones de estado sistema no lineal y variante.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
1
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Ejercicios Complementarios
Del texto guía resolver ejercicios P2.1, P2.7, E 3.4, E3.9 (Parte b), E3.17 (resolver por
superposición) y E3.19.
De la referencia 2 resolver los problemas 2.1, 2.3, 2.5, 2.10, 2.19.
Nota: en el libro:
DESOER Charles and KUH Ernest. Basic Circuit Theory. Tokyo: McGraw Hill
Kogakusha Ltd. 1969.
Sections 12-1,12-2,12-3, se encuentra un excelente tratamiento del tema.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
2
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
1. SISTEMAS Y MODELOS.
La ingeniería es la aplicación de los principios y leyes establecidas por la ciencia a la
solución de problemas: busca el beneficio de la humanidad y generar desarrollo.
El ingeniero requiere creatividad, criterio, intuición y habilidad para integrar los
conocimientos de diferentes campos para resolver los problemas de la ingeniería actual.
El estudio de los sistemas dinámicos y el diseño de sistemas de control proporcionan al
estudiante de ingeniería experiencias útiles para el desarrollo de dichas habilidades.
Modelo matemático:
Es un conjunto de ecuaciones que describen el comportamiento de un sistema y que se
obtienen a partir de las leyes de interconexión, las leyes de los elementos y de los principios
físicos fundamentales. A partir del modelo se puede analizar la respuesta, evaluar
parámetros de funcionamiento y diseñar los sistemas de control requeridos para modificar a
voluntad la respuesta dinámica del sistema.
Metodología:
Los pasos importantes para la solución de un problema de ingeniería son:
Delimitar el problema.
DEFINICIÓN
Plantear ecuaciones.
FORMULACIÓN.
SOLUCIÓN
Emplear herramientas
Comprobar resultados
VERIFICAR
En este curso se estudiaran sistemas dinámicos y se formulan modelos matemáticos de la
situación física.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
3
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
1.1 CONCEPTOS DE SISTEMA
Sistema es una colección de componentes que tienen dos propiedades fundamentales:
•
•
Las componentes internas o subsistemas, interactúan entre si.
Las fronteras del sistema separan a las componentes internas del mundo externo.
Las fronteras son arbitrarias y se representan por medio de una caja.
ENTRADA
SISTEMA
SALIDA
La condición o estado del sistema se describe por medio de variables de estado: estas, junto
con las entradas permiten determinar el estado futuro del sistema.
Un sistema dinámico es aquel en el cual las salidas actuales son el resultado de las
entradas actuales y la historia pasada.
En las aplicaciones de los sistemas dinámicos en ingeniería se esta interesado en controlar
los estados y las salidas del sistema para ello se debe emplear un controlador y su diseño en
parte del problema del control automático.
A diferencia de los sistemas dinámicos, en un sistema estático las variables o salidas sólo
dependen de las entradas actuales.
1.2 CLASIFICACIÓN DE SISTEMAS:
En un sistema se establece una relación entre las entradas (causas o excitaciones) y las
salidas (efectos o respuestas).
u (t) Î
entradas
SISTEMA
Î y(t)
salidas
Definición # 1:
Un sistema se denomina SISO (Single Input Single Output) si tiene una sola variable de
entrada y una sola variable de salida, de lo contrario es un sistema multivariable
denominado MIMO (Multiple Input Multiple Output).
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
4
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
En el sistema SISO las variables u y y son escalares, y en el sistema MIMO son vectores.
Definición # 2:
El estado de un sistema en el tiempo t0 es la mínima cantidad de información que junto con
la entrada u[t0 , ∞) determinan la respuesta del sistema para todo t ≥ t0.
El estado resume la información pasada requerida para determinar el comportamiento
futuro del sistema. Se pueden definir variables de estado en sistemas con memoria; no
aplica a sistemas instantáneos.
Un sistema con memoria se describe por medio de ecuaciones diferenciales o diferencia.
Los sistemas instantáneos se describen por ecuaciones algebraicas.
Definición # 3:
Un sistema concentrado se describe por medio de un conjunto finito de variables de estado,
y por ecuaciones diferenciales totales.
Un sistema distribuido requiere un número infinito de variables de estado y ecuaciones
diferenciales parciales.
Definición #4:
Un sistema es causal si la salida en t = t0 depende de los valores de la entrada y de la salida
para t ≤ t0.
Un sistema no causal es anticipatorio: genera una respuesta antes de tener aplicada una
entrada.
La respuesta de un sistema para todo t ≥ t0 se puede determinar si se conoce la entrada u(t) ∀
t ≥ t0 y el estado X(t0) y se puede representar como:
{ x(t0) , u[t0 , ∞) }
Estado en t0
y entrada ∀ t ≥ t0
======Î
{ x[t0 , ∞) , y[t0 , ∞) }
======Î
Estado x(t) ∀ t ≥ t0
Salida y(t) ∀ t ≥ t0
Definición # 5:
Un sistema es lineal si para los pares
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
5
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
{ x1(t0) , u1[t0 , ∞) }
======Î
{ x1[t0 , ∞) , y1[t0 , ∞) }
======Î
{ x2[t0 , ∞) , y2[t0 , ∞) }
y
{ x2(t0) , u2[t0 , ∞) }
y para todo α,β ∈ ℜ , las siguientes relaciones son validas:
1. Aditividad
{x1(t0) + x2(t0) , u1[t0 , ∞) + u2[t0 , ∞) }Î{x1[t0 , ∞) + x2[t0 , ∞) , y1[t0 , ∞) + y2[t0 , ∞)}
2. Homogeneidad
{ αx1(t0) , βu1[t0 , ∞) }
{ αx1[t0 , ∞) , βy1[t0 , ∞) }
======Î
En caso contrario el sistema es no lineal.
La combinación de las dos propiedades se conoce como la propiedad de superposición.
Definición # 6:
La respuesta de un sistema lineal se puede descomponer en dos partes:
Respuesta a {X(t0) , u(t0)} = Respuesta a {x(t0) , 0 } + Respuesta a { 0 , u(t0)}
La primera es la respuesta a entrada cero, debido a la energía inicial almacenada y la
segunda es la respuesta en estado cero debida únicamente a la entrada externa.
Definición # 7:
Un sistema es invariante con el tiempo si dado un estado inicial y una entrada:
{ x(t0) , u[t0 , ∞) }
======Î
{ x[t0 , ∞) , y[t0 , ∞) }
y para cualquier tiempo T∈ ℜ :
{ x(t0 + T) , u[t0 + T, ∞) } Î { x[t0 + T, ∞) , y[t0 + T, ∞) }
En otros casos el sistema es variante con el tiempo.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
6
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
En otras palabras, en un sistema invariante si las formas de onda de la excitación son
iguales, las formas de onda de la salida serán iguales, no importa el instante en el cual se
aplica la excitación.
La característica de un sistema invariante no cambia con el tiempo: como la respuesta es
independiente del instante inicial se asume t0 = 0 y el intervalo de interés es [0 , ∞).
Definición # 8:
Un sistema es continuo en el tiempo si acepta como entradas señales continuas en el tiempo
y genera como salidas señales continuas.
u(t) Î y(t)
ambas continuas
Un sistema es llamado de tiempo discreto si acepta como entrada señales discretas en el
tiempo y genera como salida señales discretas.
u(k t) Î y(k t)
ambas discretas
Existen diferentes criterios para clasificar los sistemas, la tabla siguiente resume los
diferentes tipos de sistemas, las herramientas matemáticas usadas para el análisis y
ejemplos de cada categoría.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
7
REV. 02
C. COTRINO B.
ENERO 2007
EJEMPLO
MATEMATICA
DESCRIPCION
CRITERIO
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Dimensión
Causalidad
# Entradas
/ Salidas
Comporta
miento en
el tiempo
Single
Input
Single
Output
(SISO)
Instantáneo Concentrado
Multiple
Input
Multiple
Output
(MIMO)
Con
memoria
Escalares
Ecuaciones Número finito de
algebraicas variables de estado.
Ecuación diferencial
total
Distribuido
Amplificad
or de
múltiples
canales /
mezclador
Dependencia
del tiempo
Invariante
Salida en t Cumplen
propiedad
de
= t0
superposición.
Depende de
la entrada
para t ≤ t0
Matrices - Ecuaciones Número infinito de
diferencial variables de estado.
Vectores
Ecuaciones
es
diferenciales
parciales.
Amplificad Arreglos
or de audio resistivos
canal
sencillo.
Linealidad
Amplificador de audio Todos los
sistemas
físicamente
realizables.
Tanque de Microondas; líneas de NOTA: Se
pueden
almacenam transmisión
construir
iento
de
sistemas
agua
anticipativo
s basados en
un modelo
Continui
dad
Variable
dependie
nte
Continui
dad
Variable
tiempo
Análogo
Continuo
para
todo t
No lineales
Variante
Cuantiza Discreto
do
Funciones y
ecuaciones
lineales.
Matrices o
ecuaciones de
coeficientes
constantes
Función
continua
Funciones y
ecuaciones no
lineales.
Matrices o
ecuaciones de
coeficientes
variantes
Función
Discreta
Todo
sistema
construido
con
elementos lineales
y operado dentro
de
su
rango
dinámico
Sistemas con
características
independientes
de t.
Rectificadores
válvulas
reacciones
químicas.
Vehículo con
masa variable
/ m(t)
/ Reacciones con
catalizador
Filtros
Converti digitales
Control
dor
Digital/ digital
Análogo.
CLASIFICACIÓN DE SISTEMAS
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
8
Ecuación
diferenci
al;
transfor
mada de
Laplace.
Ecuación
diferenci
a;
transfor
mada z.
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
1.3 CONSTRUCCION DE MODELOS
La formulación de un modelo físico consta de dos pasos:
1. Dividir el problema en el sistema de interés y su entorno.
2. Descomponer el sistema en sus componentes básicos.
Una descomposición organizada y formal es la parte más importante del análisis de
sistemas. Una vez descompuesto el sistema se puede definir o aproximar el
comportamiento de los componentes individuales.
Procedimiento para formulación:
a. Identificar los componentes, numerarlos y plantear los diagramas de cuerpo libre
que muestran las entradas, salidas y las interacciones internas y externas.
b. Identificar todos los parámetros y variables necesarias, sus convenciones y
orientaciones.
c. Escribir las relaciones entrada / salida de los componentes individuales.
Una vez identificados los componentes básicos y sus relaciones de entrada – salida, es
necesario plantear las ecuaciones del sistema a partir de las interconexiones existentes entre
los elementos y de las leyes de conservación requeridas.
Independientemente de la naturaleza del sistema, se busca llegar a una descripción
matemática unificada, de tal forma que se pueda emplear la misma técnica de análisis,
parámetros de rendimiento y procedimientos de diseño de control
Parámetros físicos: el primer grupo de parámetros físicos básicos que se debe identificar
son las constantes, que establecen las unidades, dimensiones, rangos y medidas. Muchas
veces estas constantes son desconocidas o poco definidas y por lo tanto se deben encontrar
por medio de un proceso de identificación de sistemas.
Variables: describen el comportamiento del sistema respecto al tiempo: las excitaciones
son externas y conocidas a priori, las salidas y los estados internos se deben determinar.
Las variables se pueden dividir en:
Variables pasantes o transversales (“Through”): aquellas que se miden a través de la
sección transversal del medio por el cual se transmiten:
•
•
•
•
Flujo de fluidos
Corriente (carga) eléctrica
Fuerza
Momento o Torque
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
9
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
•
Flujo de calor
Para medir estas variable el medidor se debe insertar en serie con el medio de transmisión.
Variables sobre o de potencial (“Across”): aquellas que se miden entre dos puntos; la
medida es la diferencia entre dos valores, uno de ellos de referencia:
•
•
•
Presión
Voltaje
Posición (velocidad)
Para medir estas variable el medidor se debe insertar en paralelo con el medio de
transmisión.
Para la descripción de los componentes se requieren dos variables una pasante y otra
sobre.
En algunos sistemas además de las variables principales, se deben definir variables
secundarias ya sea por derivación o integración:
SISTEMA
Eléctrico
Mecánico
Traslación
SOBRE Primaria.
(V) Voltaje
Secundaria
Φ integral
PASANTE Primaria Secundaria.
(i) Corriente
q (Carga) integral
(v) Velocidad
a (aceleración) derivada
x (posición) integral
Θ integral
α derivada
(f) fuerza
Mecánico
Rotacional
Térmico
(w) velocidad angular
(T) Temperatura
Hidráulico
(p) Presión
Momento o Torque
(q) Flujo de calor
(W) Tasa de flujo
Volumen - integral
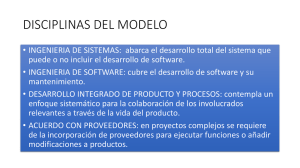
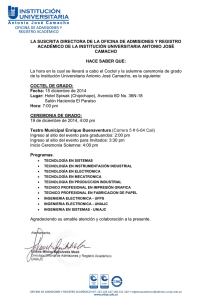
EJEMPLO 1.1 Para el sistema de distribución de agua considerar como subsistemas al
tanque y a la válvula de salida.
.
1. Plantear las ecuaciones de cada subsistema
2. Identificar relaciones dinámicas y estáticas
3. Identificar linealidad de cada subsistema
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
10
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Pozo
i. Válvula:
La presión en el fondo del tanque es:
p (t ) = ρ * g * h(t ) + Pa
Pa : Presión atmosférica
h : nivel del agua en el tanque
La presión p1 , aguas arriba de la válvula es:
p1 (t ) = ρ * g * H 0 + p1 (t )
p1 (t ) = ρ * g * (h(t ) + H 0 ) + Pa
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
11
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
La presión p2 , aguas abajo de la válvula es:
p2 (t ) = Pa
El flujo a través de un orificio esta dado por la ley de Bernoulli, la gravedad específica del
agua GF es uno.
q 0 (t ) = C ∆P (t )
Donde C es la constante del orificio y ∆P es la diferencial de presión sobre el orificio.
q0 (t ) = C ( P1 (t ) − P2 (t ))
q 0 (t ) = C ρ * g * ( H o + h(t ))
Esta es la ecuación que describe la válvula: es una relación instantánea. q0(t) NO depende
de la historia del tanque: solamente depende del valor instantáneo de h(t). Adicionalmente
la relación es no lineal.
ii. Tanque
Para el subsistema del tanque la tasa de cambio del volumen en el tanque es función de la
diferencia de flujo entrante y flujo saliente. Asumiendo que el flujo hacia otros usuarios es
cero:
dυ
= qin − q0
dt
Si el área de la sección transversal del tanque es constate:
υ = Ah
A
dh(t )
= qin − q0
dt
y
t
h(t ) =
1
(qin − q0 )dt + h(0)
A ∫0
donde h(0) es el nivel inicial y depende de la historia del sistema.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
12
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Esta es la ecuación dinámica del integrador: la salida en un instante t es función de las
variables actuales y de la historia o memoria del sistema representada por la condición
inicial, h(0)
u(t) Î Integrador Î y(t)
y(t) = ∫ u (t )dt + y (0)
Cuando la posición de la válvula se modifica q 0 cambia y se va a afectar la condición
{ q in − q 0 } en el tanque. Si no hay cambio en qin el nivel del agua h va a cambiar.
¿Es instantáneo este cambio en el nivel?
Un cambio en q 0 se debe propagar a lo largo de la tubería:
v=
T0 =
q0
AP
(velocidad )
A L
L
L
=
= p
Q0
v
Q0
Ap
El tiempo muerto To es el tiempo que tarda la variable en empezar a responder al cambio,
es una propiedad del sistema y esta asociado al retardo de transporte de energía o materia
prima.
u(t) Î Retardo T0
Î y(t)
y(t) = u(t – T0)
La potencia instantánea entregada o disipada por el componente es el producto de la
variable “sobre” por la variable “pasante”, excepto en los sistemas térmicos donde el flujo
de calor tiene unidades de potencia.
En el sistema eléctrico
p(t) = v(t) i(t)
La energía o trabajo:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
13
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
w(t) =
T
T
0
0
∫ p(t )dt =
∫ v(t )(i)dt
EJEMPLO 1.2
Una hidroeléctrica tiene una cabeza efectiva de 324 m y un flujo promedio de 137 m3 /s. La
represa cubre un área de 640 km2. La eficiencia de las turbinas es el del 92% y la del
generador del 95%.
a) Calcular la potencia hidráulica disponible
b) Asumiendo 0 efectos externos cual es la disponibilidad de energía, si el nivel del
agua puede bajar 1 m ?
c) Cual es el máximo de la potencia y de la energía eléctrica disponible
SOLUCIÓN
a) La presión en el fondo es:
P = ρgh
P = 1000 kg/m3 * 9.8 m/s2 * 324 m = 3.175*106 N/ m2
La potencia disponible
P=p*f = 3.175*106 N/ m2 * 137 m3 / s
= 4.35 * 108 N*m/s
= 4.35 * 108 W
= 435 MW potencia hidráulica
b) 1 metro de altura equivale a
V = 640 km2 *1 m = 640 km2 *106 m2 */km2* 1m
= 6.4 * 108 m 3
Asumiendo un comportamiento aproximadamente lineal, el tiempo necesario para evacuar
el volumen anterior es:
Q = V/t Î t = 6.4*108 m3/ 1.37*102 m3/s
t = 4.67*106 s = 1297.2 horas
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
14
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Cuando h caiga a 323 metros la potencia hidráulica es de 433.7 MW (El promedio es de
434.4MW)
Energía hidráulica disponible:
434.4 MW*1.2972*103 horas = 563.4 GW-hora. (promedio)
c) Potencia Eléctrica
PTURBINA= ηT*PHIDRAULICA = 0.92*434,4MW
= 399.6MW
PGENERADOR = ηG * 399.6MW
= 0.95*399.6MW
PGENERADOR = 379.6MW
La energía eléctrica disponible:
W = 379.6 MW * 1.297*103 H
W = 492.3 GW- hora Energía disponible
1.4 DESCRIPCION DEL SISTEMA
Una vez que se delimita el sistema físico es necesario plantear el conjunto de ecuaciones
que lo describen. Dependiendo de las preguntas a resolver o del objetivo del análisis se
puede plantear dos tipos diferentes de descripciones:
•
•
Entrada-Salida
Ecuaciones de estado.
1.4.1 DESCRIPCION ENTRADA SALIDA
Por la propiedad de descomposición, Definición # 6, se sabe que la respuesta total del
sistema es debida al estado inicial en to= 0 y a la entrada u[0,∞). La respuesta en estado
cero de un sistema lineal se puede obtener a partir de la descripción Entrada-Salida.
Sea un sistema SISO excitado por un pulso de ancho ∆, δ∆ (t-t1), amplitud 1/∆ y definido
en t = t1
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
15
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
[δ∆ (t-t1)]*∆=1
u(ti) [δ∆(t-ti)∆]
∆
1/ ∆
t1 + ∆
t1
ti
Pulso en t1
ti + ∆
Aproximación de la señal de entrada
La entrada u(t) se puede representar por:
u(t) ≈
∑ u (t ) δ∆(t- t )∆
i
i
i
Sea g∆ (t,ti) la salida en el tiempo t producida por el pulso u(t) = δ∆(t- t i ) aplicada en t i
δ∆(t- t i )
g∆ (t, t i )
Como el sistema es lineal cumple:
δ∆(t-ti) u(ti) ∆
Homogeneidad:
g∆ (t,ti) u(ti) ∆
y
Aditividad:
∑ δ ∆(t-ti)u(ti)∆
i
∑ g ∆(t,ti)u(ti)∆
i
⇒ la salida y(t) producida por la entrada u(t) se puede aproximar como:
y(t) =
∑ g ∆(t,ti)u(ti)∆
i
Cuando ∆ tiende a cero δ∆(t-ti) se convierte en un impulso δ(t-ti), g∆ (t,ti) se convierte en
h(t,ti), la sumatoria se convierte en integral, el tiempo discreto t i se convierte en un tiempo
continuo y se puede reemplazar por τ y ∆ por dτ .
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
16
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
y(t) =
∫
∞
h (t,τ)u(τ)dτ
−∞
Donde t:
tiempo en el cual se observa la salida
τ:
tiempo en el cual se aplica la excitación
h(t,τ): respuesta impulso
Como el sistema es causal no hay respuesta para t < τ → h(t,τ) = 0 ∀ t<τ y los tiempos
τ > t no cuentan y el límite superior se puede reemplazar por t. Como el sistema esta
relajado en to la salida y(t) ∀ t > to es debida exclusivamente a u(t) y por lo tanto el
límite inferior de la integral se puede reemplazar por to .
Por lo tanto para un sistema lineal, causal lineal y relajado en to:
t
y(t)= ∫ h (t,τ)u(τ)dτ
t0
Si el sistema es invariante con el tiempo la entrada u aplicada en el instante (to+T)
segundos genera la salida y desplazada (to+ T) segundos. El mismo argumento aplica para
la respuesta a entrada cero respecto al corrimiento del instante inicial.
En otras palabras si la entrada y el estado inicial conservan su forma de onda, no importa en
que tiempo se apliquen, la forma de onda de la salida y será igual, y
h(t,τ) = h(t+T,τ+T)= h(t-τ,τ-τ)= h(t-τ)
aunque las funciones son diferentes, se usa el mismo símbolo.
Como el sistema esta relajado en t o se puede elegir t o = 0
t
y(t)= ∫ h (t-τ)u(τ)dτ o
0
t
y(t)= ∫ h (τ)u(t-τ)dτ
0
Si el sistema es variante con el tiempo h es función de 2 variables: el tiempo de aplicación
de la excitación τ y el tiempo de observación de la respuesta t En el sistema invariante solo
es función
de (t-τ) el tiempo transcurrido desde la aplicación de la excitación.
Si el sistema es multivariable con (p) entradas y (q) salidas la integral de convolución se
extiende a:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
17
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
t
y(t)= ∫ H (t,τ)u(τ)dτ
to
H(t,τ) =
h11 (t,τ) . . . h1p (t,τ)
.
.
.
.
.
.
hq1 (t,τ) . . . hqp (t,τ)
donde hi j (t,τ) es la respuesta impulso en el tiempo t medida en el terminal de salida i
debido a un impulso aplicado en el instante τ en la entrada j, con todas las demás entradas
en cero.
1.4.2 FUNCION DE TRANSFERENCIA
Para el estudio de los sistemas lineales e invariantes con el tiempo se puede emplear la
transformada de Laplace.
Aplicando la definición de transformada a la ecuación de convolución
Y(s) =
∫
∞
0
∞ t
y (t )e dt = ∫ [ ∫ h (t-τ)u(τ)dτ] e − st dt
− st
0 0
Como el sistema es causal h(t-τ) ≡ 0 ∀ t<τ se puede cambiar el limite superior de la integral
interna a ∞. Intercambiando el orden de integración:
∞ ∞
Y(s) = ∫ [ ∫ h (t-τ) e − s ( t −τ ) dt] u(τ) e − st dτ
0 0
Haciendo un cambio de variable λ = t − τ
∞ ∞
Y(S)= ∫ [ ∫ h (λ) e − λs dλ] u(τ) e − st dτ
0 −τ
Como el sistema es causal para λ < 0 (t < τ) la respuesta impulso h(λ) = 0 y el límite
inferior de la integral interna se puede cambiar por 0.
∞ ∞
Y(S)= ∫ [ ∫ h (λ) e − λs dλ] u(τ) e − st dτ
0 0
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
18
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Como la integral interna es función únicamente de λ y la externa de τ:
∞
∞
0
0
Y(s) = [ ∫ h ( λ) e − λs dλ] [ ∫ u (τ) e − st dτ]
que por la definición de la transformada de Laplace corresponde a:
Y(s)=H(s)U(s)
Hacer la convolución de dos funciones en el dominio del tiempo es equivalente a
multiplicar las transformadas de las funciones en el dominio s.
Cuando U(s) = 1, transformada de la función impulso, H(s) = Y(s) es la transformada de
Laplace de la respuesta impulso:
H(s) = Y(s)/ U(s)
en estado cero =
L{ y (t )}
L{u (t )}
en estado cero
La función de transferencia sólo se puede emplear en sistemas lineales, invariantes con el
tiempo y sólo da información sobre el estado cero.
Si el sistema es multivariable con (p) entradas y (q) salidas se debe evaluar una matriz de
funciones de transferencia H(s) de orden pxq.
Definición # 9.
Una función racional de s es el cuociente de dos polinomios de s con coeficientes reales.
H (s) =
B( s ) bm s m + bm −1s m −1 + ..... + b1s + b0
=
A( s ) an s n + an −1s n −1 + ..... + a1s + a0
Definición # 10.
Una función racional es propia si el grado del polinomio del numerador (m) es igual o
menor que el grado del denominador (n): m ≤ n.
Definición # 11.
Una función racional es estrictamente propia si el grado del numerador es menor que el
grado del denominador: m < n.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
19
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
1.4.3 DESCRIPCION EN EL ESPACIO DE ESTADO
Todo sistema lineal y concentrado se puede describir por un conjunto de ecuaciones de la
forma:
•
X 1 (t) = a11(t)x1(t) + … + a1n(t)xn(t) + b11(t)u1(t)+ … + b1p(t)up(t)
.
.
.
•
X n (t) = an1(t)x1(t) + … + ann(t)xn(t) + bn1(t)u1(t) + … + bnp(t)up(t)
y las salidas
y1 (t) = c11(t)x1(t) + … + c1n(t)xn(t) + d11(t)u1(t)+ … + d1p(t)up(t)
.
.
.
yq (t) = cq1(t)x1(t) + … + cqn(t)xn(t) + dq1(t)u1(t) + … + dqp(t)up(t)
Que se representan en notación matricial como:
•
X (t) = A(t)X(t)+ B(t)U(t)
Ecuación dinámica de estado, sistema LVT
Y(t) = C(t)X(t)+D(t)U(t)
Donde:
•
X (t) vector de variables de estado del sistema (n x
1)
• A (t) matriz del sistema (n x n)
• B (t) matriz de entrada (n x p)
• U (t) vector de variables de entrada (p x 1)
• Y (t) vector de variables de salida (q x 1)
• C (t) matriz de salida (q x n)
• D (t) matriz “hacia delante” (q x p)
Los elementos de las matrices A(t), B(t), C(t), D(t) son variables con el tiempo.
La primera ecuación forma un conjunto de n ecuaciones diferenciales de primer orden. La
ecuación de salida es un conjunto de q ecuaciones algebraicas.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
20
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Cuando el sistema es lineal invariante con el tiempo (LIT) los elementos de las matrices
A(t), B(t), C(t), D(t) son constantes con el tiempo y la notación se simplifica:
•
X (t) = AX(t)+ BU(t)
Ecuación dinámica de estado, sistema LIT
Y(t) = CX(t)+DU(t)
El conjunto de variables de estado X(t) debe describir totalmente el efecto de la historia del
sistema sobre la repuesta futura. (Ver definición # 2). Como la historia del sistema depende
de la energía inicial almacenada, se asocia una variable de estado con cada elemento de
almacenamiento de energía.
La selección de variables de estado no es única, pero el conjunto debe ser independiente:
ninguna variable se debe poder representar por una combinación algebraica de las demás y
de las entradas.
En algunos casos, el número de variables de estado es diferente al número de elementos de
almacenamiento, ya sea por una interconexión especial entre componentes, o por que se
necesitan variables no directamente relacionadas con el almacenamiento de energía; pero se
debe verificar que el conjunto de variables de estado sea linealmente independiente.
La descripción de sistemas por variables de estado es muy general: se puede emplear para
sistemas lineales, invariantes, variantes, no lineales, discretos, SISO, MIMO como se vera
en sesiones posteriores.
EJEMPLO 1.3 El sistema de retardo unitario esta definido por
y(t) = u(t-1)
a) Para determinar la respuesta {y(t), t ≥ t o } a partir de la entrada {u(t), t≥ t o }, es
necesario conocer la información {u(t), t o -1 ≤ t < t o }
u
y
RETARDO
to-1
to
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
t
to-1
21
to
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
el estado inicial del sistema esta dado por {u(t), t o -1 ≤ t < t o } y existen infinitos puntos
entre t o -1 ≤ t < t o : como el número de variables de estado es infinito el sistema es
distribuido
b) para determinar la respuesta impulso
u(t) = δ(t)
y(t) = δ (t-1)
Entonces la respuesta impulso es g(t) = δ (t-1) y se puede emplear el teorema de
convolución para evaluar la respuesta en estado cero.
1.4.4 Relación tiempo-frecuencia.
La descripción por medio de la función de transferencia es válida solamente cuando las
condiciones iniciales son cero. La descripción en variables de estado es adecuada cuando es
necesario analizar el comportamiento del sistema y la respuesta debida a la energía inicial
almacenada.
La transformada de Laplace de la ecuación dinámica de estado del sistema LIT,:
•
L{ X } = L{ A X (t ) + B U (t )}
s X ( s ) − X (0) = A X ( s ) + B U ( s )
( sI − A) X ( s ) = X (0) + BU ( s )
premultiplicando por (sI - A) -1
X ( s ) = ( sI − A) −1 X (0) + ( sI − A) −1 B U ( s )
Respuesta a
entrada cero
Repuesta en
estado cero
La respuesta completa del sistema es:
Y ( s ) = CX ( s ) + DU ( s )
Y ( s ) = C ( sI − A) −1 X (0) + [C ( sI − A) −1 B + D ]U ( s )
Respuesta a
entrada cero
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
Repuesta en
estado cero
22
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
En el estado cero X(0) = 0:
Y ( s ) = [C ( sI − A) −1 B + D]U ( s )
Y la función de transferencia representada por G(s) es:
G ( s ) = C ( sI − A) −1 B + D
Esta ecuación permite obtener G(s) a partir de la descripción en variables de estado, si el
sistema es SISO se obtiene una función propia, si el sistema es MIMO con p entradas y q
salidas, se obtiene una matriz de funciones de transferencia de orden (q x p) y cada uno de
los elementos de la matriz es una función propia.
EJEMPLO 1.4.
Dada la ecuación entrada-salida de un sistema LIT
du (t )
d 2 y (t )
d y (t )
+2
+ 4 y (t ) =
+ 4u (t )
2
dt
dt
dt
Hallar:
a) Función de transferencia.
Tomando la transformada de Laplace y asumiendo condiciones iniciales nulas:
s 2 Y ( s ) + 2 s Y ( s ) + 4Y ( s ) = s U ( s ) + 4U ( s )
G (s) =
Y (s)
s+4
= 2
U (s) s + 2 s + 4
Función racional estrictamente propia, definición # 11.
b) La respuesta impulso: si u (t ) = δ (t )
h(t ) = l −1{Y ( s )} = L−1 {
= L−1 {
s+4
( s + 2) 2
⇒
U ( s) = 1
}
1
2 ⎫
+
= (1 + 2t )e − 2t
2 ⎬
( s + 2) ( s + 2) ⎭
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
23
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
1.5 VARIABLES DE ESTADO DE SISTEMA ELÉCTRICO.
El comportamiento dinámico de un circuito eléctrico está determinado por los elementos de
almacenamiento de energía L y C. Por lo tanto la escogencia natural de variable de estado
es iL y vC . También se pueden emplear las variables integrales asociadas como q (carga) y
Φ (flujo).
En los ejemplos siguientes se analizaran los criterios de escogencia y la relación que existe
entre los diferentes modelos obtenidos.
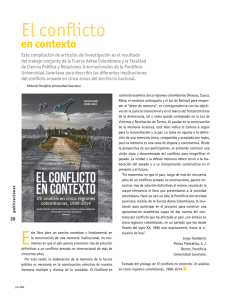
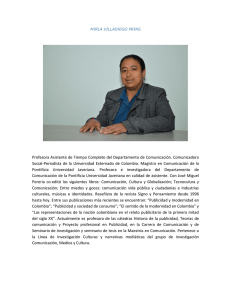
EJEMPLO 1.5
Plantear el conjunto de ecuaciones de estado que describe al sistema. Tomar como salida
vR 2
Variables de estado:
Corriente en la inductancia 1: i1
Corriente en la inductancia 2: i2
Voltaje en el condensador:
vc
Para los condensadores se plantean las ecuaciones de corriente de nodo (KCL).
KCL para el nodo 1:
i C = i1 − i2
dvC
= i1 − i2
dt
•
1
1
v c = i1 − i2
C
C
C
Para las inductancias se plantean las ecuaciones de voltaje de malla (KVL)
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
24
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
KVL para la malla 1:
e s = i1 R1 + vL1 + vc
di1
= −i1 R1 − vc + es
dt
•
R
1
1
i1 = − 1 i1 − vc + es
L1
L1
L1
L1
KVL para la malla 2:
vc = vL 2 + i2 R2
di2
= −i2 R2 + vc
dt
•
R
1
i 2 = − 2 i2 + vc
L2
L2
L2
En notación matricial:
⎛
1
⎛ • ⎞ ⎜0
v
⎜
c
⎜ ⎟
C
⎜• ⎟ ⎜ 1
R1
⎜ i1 ⎟ = ⎜ −
L1
⎜ • ⎟ ⎜ L1
⎜⎜ i 2 ⎟⎟ ⎜ 1
0
⎝ ⎠ ⎜⎜
⎝ L2
y = vR2
-
⎞
⎟
⎛0 ⎞
⎟
⎟⎛⎜ vc ⎞⎟ ⎜⎜ 1 ⎟⎟
0 ⎟⎜ i1 ⎟ + ⎜ ⎟e s
⎟⎜ ⎟ ⎜ L1 ⎟
⎟⎝ i2 ⎠ ⎜ ⎟
R2 ⎟
⎝0 ⎠
⎟
L2 ⎠
1
C
⎛ vc ⎞
⎜ ⎟
= i2 R2 = (0 0 R2 )⎜ i1 ⎟
⎜i ⎟
⎝2⎠
b) También se pueden seleccionar como variables de estado el flujo en la inductancia y la
carga en los condensadores.
φ1 = L1i1 (t )
φ2 = L2i2 (t )
q (t ) = C v c (t )
La ecuación de corriente en el condensador:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
25
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
•
q (t ) =
φ1
L1
−
φ2
L2
Las ecuaciones de voltaje de malla:
es =
φ1
L1
•
•
R1 + φ1 +
φ1 = es −
y
•
φ1 =
φ1
L1
R1 −
qc (t )
C
qc (t )
C
q(t ) • φ2
= φ2 + R2
C
L2
• ⎛
1
R ⎞
q(t ) − φ2 ⎜⎜ 2 ⎟⎟
C
⎝ L2 ⎠
En notación matricial:
⎛
⎛ • ⎞ ⎜0
⎜ qc ⎟ ⎜
⎜• ⎟ ⎜ 1
⎜ φ1 ⎟ = ⎜ −
⎜ • ⎟ ⎜ C
⎜⎜ φ ⎟⎟ ⎜ 1
2
⎝ ⎠ ⎜⎜
⎝C
1 ⎞
⎟
L2 ⎟
⎟
0 ⎟
⎟
R ⎟
- 2 ⎟⎟
L2 ⎠
1
L1
-
-
R1
L1
0
⎛ ⎞
⎜ qc ⎟
⎜ ⎟ ⎛⎜ 0 ⎞⎟
⎜ φ1 ⎟ + ⎜1 ⎟ es
⎜ ⎟ ⎜ ⎟
⎜φ ⎟ ⎝ 0 ⎠
⎜ 2⎟
⎝ ⎠
La ecuación de salida:
vR 2 =
R2φ2
L2
⎛ qc ⎞
⎛
R2 ⎞⎜ ⎟
⎟⎜ φ1 ⎟
y = ⎜⎜ 0 0
L2 ⎟⎠⎜ ⎟
⎝
⎝ φ2 ⎠
Como las dos descripciones corresponden al mismo sistema, la descripción de entrada –
salida debe ser la misma. Evaluando la función de transferencia en cada caso:
G (s) =
VR2 ( s )
ES ( s )
→
→
= C ( S I − A) −1 b
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
26
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Para el primer modelo:
→
→
( S I − A) −1
⎛
⎜S
⎜
⎜ 1
=⎜
⎜ L1
⎜
⎜− 1
⎜ L
⎝
2
1
C
S+
0
1
C
R1
L1
0
S+
R2
L2
⎛⎛
⎞⎛
⎞
1⎛
R ⎞
⎜ ⎜⎜ S + R1 ⎟⎟⎜⎜ S + R2 ⎟⎟
− ⎜⎜ S + 2 ⎟⎟
L1 ⎠⎝
L2 ⎠
L1 ⎝
L2 ⎠
⎜⎝
⎜
⎛
1⎛
1
R ⎞
R ⎞
⎜
⎜⎜ S + 2 ⎟⎟
S ⎜⎜ S + 2 ⎟⎟ +
L2 ⎠
L2 ⎠ L2C
⎜ C⎝
⎝
⎜
1⎛
1
R ⎞
⎜ − ⎜⎜ S + 1 ⎟⎟
⎜
C⎝
L1 ⎠
L1C
⎝
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
−1
=
1
⎡⎛
R ⎞
R ⎞
R ⎞⎤
R ⎞⎛
1 ⎛
1 ⎛
⎜⎜ S + 2 ⎟⎟ +
⎜⎜ S + 1 ⎟⎟
S ⎢⎜⎜ S + 1 ⎟⎟⎜⎜ S + 2 ⎟⎟⎥ +
L1 ⎠
L2 ⎠ L2 C ⎝
L 2 ⎠⎦ L1C ⎝
L1 ⎠⎝
⎣⎝
1 ⎛
R ⎞ ⎞
⎜⎜ S + 1 ⎟⎟ ⎟
L2 ⎝
L1 ⎠ ⎟
⎟
1
⎟
L2C
⎟
⎛
R1 ⎞ 1 ⎟
⎟
⎜
S ⎜ S + ⎟⎟ +
L1 ⎠ L1C ⎟⎠
⎝
T
⎛0⎞
⎜ ⎟
1
G ( s ) = (0 0 R2 )( S I − A) −1 ⎜ ⎟
⎜ L1 ⎟
⎜0⎟
⎝ ⎠
→
→
R2
L1 L2C
G ( s) =
⎛R R ⎞ ⎛RR
1
1 ⎞ R1 + R2
⎟⎟ +
+
S 3 + S 2 ⎜⎜ 1 + 2 ⎟⎟ + S ⎜⎜ 1 2 +
⎝ L1 L2 ⎠ ⎝ L1C2 L1C L2C ⎠ L2 L1C
A partir del segundo conjunto de ecuaciones de estado se obtiene la misma función de
transferencia. Obviamente se llega a la misma G(s) empleando análisis directo en el plano
s.
Del ejemplo su pueden extraer las siguientes conclusiones:
1. No hay una descripción de estado única, sin embargo como el estado es la mínima
cantidad de información
que, junto con la entrada, permite evaluar el
comportamiento dinámico del sistema, el número de variables de estado de un
sistema si es único.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
27
REV. 02
C. COTRINO B.
ENERO 2007
×
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
2. Sólo existe una representación entrada – salida: la respuesta impulso y la función de
transferencia son únicas.
3. La función de transferencia que se obtiene es racional, definición # 9.
4. Las diferentes representaciones de estado que se obtienen de un mismo sistema
deben estar relacionadas por transformaciones lineales.
5. En los casos SISO si el objetivo final del análisis es obtener la función de
transferencia, NO se emplea el análisis por variables de estado: se plantea
directamente el modelo en el plano s.
EJEMPLO 1.6.
Para el circuito dado plantear el modelo en variables de estado. C1 = 1; C2 = C3 = 2 y R = 2.
Como existen tres condensadores inicialmente se toman 3 variables de estado:
vC1 , vC2 , vC3
Las ecuaciones de corriente en los condensadores:
ic1 = C1
dvc1
ic2 = C2
dvc2
ic3 = C3
dvc3
dt
=
vs − vc1
R
− C2
dvc2
dt
dt
dt
Reemplazando los valores numéricos:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
28
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
vs − vc1
2
•
•
•
= vc1 + 2 vc2
•
vc2 = vc3
Pero:
vc1 = vc2 + vc3
•
•
•
vc2 = vc1 − vc2
•
vc2 =
•
1 •
vc1 = vc3
2
No se necesita sino 1 variable de estado:
•
1
1
vc1 = − vc1 + vs
4
4
El ejemplo muestra que el conjunto de variables de estado debe ser linealmente
independiente.
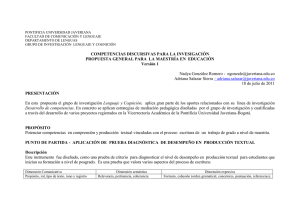
EJEMPLO 1.7
Plantear el modelo en variables de estado tomando como variables de estado:
a. La carga
b. El voltaje
c. Encontrar la relación entre los dos modelos.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
29
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
i1 =
dq1
dt
i2 =
dq2
dt
vc1 =
1
q1 (t )
C1
vc2 =
1
q2 (t )
C2
La ecuación de voltaje de la malla 1:
vc2 = i1 (1Ω) + vc1
(1Ω)
dq1 1
1
=
q2 (t ) − q1 (t )
dt C2
C1
•
q1 = −q1 + 0.5q 2
La ecuación de corriente de nodo para el condensador 2:
i1 + i2 + i3 = 0
dq1 dq2 1
+
+ vc = 0
dt
dt R2 2
dq2
1 1
= −[− q1 + 0.5q2 ] − × q2
dt
R2 C2
•
q2 = q1 − 0.5q2 − q2
•
q2 = q1 − 1.5q2
Para la ecuación de salida:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
30
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
•
i2 = q2 = q1 − 1.5q2
El modelo de estado:
⎛ • ⎞ ⎛ − 1 0.5 ⎞⎛ q ⎞
⎜ q1 ⎟ = ⎜
⎟⎜ 1 ⎟
⎜ • ⎟ ⎜ 1 − 1.5 ⎟⎜ q ⎟
⎠⎝ 2 ⎠
⎝ q2 ⎠ ⎝
⎛q ⎞
y = (1 − 1.5)⎜⎜ 1 ⎟⎟
⎝ q2 ⎠
b. Si se definen como variables de estado vc1 y vc2 :
KCL para el nodo de C1
i1 = vc2 - vc1
C1
dvC1
dt
= vc2 - vc1
•
vC1 = - vc1 + vc2
KCL para el nodo de C2
i2 = −i1 − i3
C2
dvC2
dt
=−
vC2
R2
(
− vC2 − vC1
)
= −2vC2 − vC2 + vC1
= −3vC2 + vC1
•
vC2 = 0.5vC1 − 1.5vC2
En notación matricial:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
31
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
⎛ • ⎞
1 ⎞⎛ vC1 ⎞
⎜ vC1 ⎟ ⎛ − 1
⎜
=
•
⎜ ⎟ ⎜ 0.5 − 1.5 ⎟⎟⎜⎜ v ⎟⎟
⎜ vC ⎟ ⎝
⎠⎝ C2 ⎠
⎝ 2⎠
Para encontrar una relación entre los dos modelos:
vC1 = C1q1 : vC1 = q1
vC2 = 0.5q2
⎛ vC1 ⎞ ⎛ 1 0 ⎞⎛ q1 ⎞
⎜ ⎟ = ⎜⎜
⎜ vC ⎟ 0 0.5 ⎟⎟⎜⎜ q ⎟⎟
⎠⎝ 2 ⎠
⎝ 2⎠ ⎝
•
1 ⎞⎛ 1 0 ⎞⎛ q1 ⎞
⎛ 1 0 ⎞⎛⎜ q1 ⎞⎟ ⎛ - 1
⎜⎜
⎟⎟ • = ⎜⎜
⎟⎟⎜⎜
⎟⎟⎜⎜ ⎟⎟
⎜ ⎟
⎝ 0 0.5 ⎠⎝ q2 ⎠ ⎝ 0.5 - 1.5 ⎠⎝ 0 0.5 ⎠⎝ q2 ⎠
⎛ • ⎞ ⎛ 1 0 ⎞ −1 ⎛ - 1
1 ⎞⎛ 1 0 ⎞⎛ q1 ⎞
⎜ q1 ⎟ = ⎜
⎟⎟ ⎜⎜
⎟⎟⎜⎜
⎟⎟⎜⎜ ⎟⎟
•
⎜
⎜ ⎟ 0 0.5
0.5
1.5
0
0.5
⎝
⎠
⎝
⎠
⎝
⎠⎝ q2 ⎠
⎝ q2 ⎠
=
1 ⎞⎛ 1 0 ⎞⎛ q1 ⎞
1 ⎛ 0.5 0 ⎞⎛ - 1
⎜⎜
⎟⎟⎜⎜
⎟⎜
⎟⎜ ⎟
0.5 ⎝ 0 1 ⎠⎝ 0.5 - 1.5 ⎟⎠⎜⎝ 0 0.5 ⎟⎠⎜⎝ q2 ⎟⎠
⎛ • ⎞ ⎛ - 1 0.5 ⎞⎛ q ⎞
⎜ q1 ⎟ = ⎜
⎟⎜ 1 ⎟
⎜ • ⎟ ⎜ 1 1.5 ⎟⎜ q ⎟
⎠⎝ 2 ⎠
⎝ q2 ⎠ ⎝
Los dos conjuntos de ecuaciones de estado que describen al mismo sistema están
relacionados por una transformación lineal.
∧
∧
Sea: X = P X , donde X es el nuevo vector de estado y P es la representación matricial de
la transformación lineal que relaciona a los dos conjuntos de variables de estado.
La descripción original:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
32
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
•
X = AX + BU
Y = CX
La descripción usando el nuevo vector de estado es:
•
∧
∧ ∧
∧
X = A X + BU
∧ ∧
Y =C X
Reemplazando en el conjunto original:
•
•
∧
X =PX
•
∧
X = AP X + BU
•
∧
∧
P X = AP X + BU
Premultiplicando por P −1
•
∧
∧
X = ( P −1 AP ) X + P −1 BU
•
∧
∧ ∧
∧
Que debe ser igual a X = A X + B U
Se obtienen las transformaciones similares:
∧
A = P −1 AP;
∧
B = P −1 B
Para la ecuación de salida:
∧
Y = CP X ;
∧
C = CP
Las matrices están relacionadas por una transformación similar.
EJEMPLO 1.8
Para el sistema MIMO plantear la ecuación de estado. Como vector de salida se requieren
las corrientes entregadas por las fuentes de voltaje.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
33
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
Las variables de estado son los voltajes vC1 y vC 2 . Empleando el teorema de superposición:
Para vb = 0 el circuito resultante es:
KCL nodo 1:
va − v'C1
R1
i '2 =
= i '1 +i '2
v'C1 −v'C2
R1
Combinando:
i '1 =
va − v'C1
R1
−
v'C1 −v'C2
R1
Reemplazando: i '1 = C1
dv'C
dt
La primera ecuación de estado:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
34
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
dv' C1
dt
1
1
(v a − v' C1 ) −
(v' C1 −v'C2 )
R1C1
R2 C1
=
KCL nodo 2:
v'C1 −v'C2
R2
dv'C2
dt
=
= C2
v'C1
R2C2
dv'C2
dt
−
+
v'C2
R3
1
1
v'C2 −
v 'C
R2C2
R3C2 2
Para va = 0 el circuito resultante es:
Es el mismo problema anterior intercambiando los valores de los componentes así:
R1 → R3
C1 → C2
R2 → R2
C 2 → C3
R3 → R1
E intercambiando también las variables.
v'C1 → v' 'C2 ; v'C2 → v' 'C1
Las nuevas ecuaciones de nodo:
dv' 'C2
dt
=
(
)
(
1
1
vb − v"C2 −
v'C2 −v"C1
R3C2
R2C2
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
)
35
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
dv' 'C1
dt
=
dv' 'C2
R2C1
−
( )
( )
1
1
v"C1 −
v"C1
R2C1
R1C1
El voltaje total sobre el condensador vC1 :
vC1 = v'C1 +v"C1
(
d v'C1 + v' 'C1
dt
•
vC1 = −vC1
)=
1
(va ) − v'C1 1 − v'C1 1 + v'C2 1 − v' 'C1 1 − v' 'C1 1 + v' 'C2 1
R1C1
R1C1
R2C1
R2C1
R1C1
R2C1
R2C1
1
1
1
1
− vC1
+ vC2
+ va
R1C1
R2C1
R2C1
R1C1
El voltaje total sobre el condensador vC2
vC2 = v'C2 + v' 'C2
(
d v'C2 +v' 'C2
dt
•
v c2 =
)=
vb
1
1
1
1
1
1
+
v'C1 +
v' 'C1 −
v'C2 −
v' 'C2 −
v 'C 2 −
v ' 'C 2
R3C2 R2C2
R2C2
R2C2
R2C2
R3C2
R3C2
v
1
1
1
vC1 −
vC2 −
vC2 + b
R2C2
R2C2
R3C2
R3C2
La ecuación matricial de estado:
⎞
⎛ ⎛ 1
1 ⎞
1
⎛ 1
⎟
⎟⎟
+
⎜
⎛ • ⎞ ⎜ − ⎜⎜
R2C1
⎜ vC1 ⎟ ⎜ ⎝ R1C1 R2C1 ⎠
⎟⎛⎜ vC1 ⎞⎟ ⎜ R1C1
+
⎜ • ⎟=⎜
⎛ 1
1
1 ⎞ ⎟⎜⎝ vC2 ⎟⎠ ⎜ 0
⎜ vC ⎟ ⎜
⎟⎟ ⎟
− ⎜⎜
+
⎝ 2⎠ ⎜
⎜
⎟
R2C2
⎝
⎝ R2C2 R3C2 ⎠ ⎠
⎝
⎞
0 ⎟
⎟⎛⎜ va ⎞⎟
1 ⎟⎜⎝ vb ⎟⎠
R3C2 ⎟⎠
La ecuación de salida:
ia =
v a − vC1
R1
=−
1
1
vC1 + v a
R1
R1
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
36
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
ib =
v b − vC2
R3
=−
1
1
vC2 +
vb
R3
R3
En notación matricial:
⎛ 1
⎜−
i
⎛ a ⎞ ⎜ R1
⎜
⎟
Y =⎜ ⎟=
⎝ ib ⎠ ⎜ 0
⎜
⎝
⎞
⎛ 1
0 ⎟
⎜
v
⎛
⎞
⎟⎜ C1 ⎟ + ⎜ R1
1 ⎟⎜ v ⎟ ⎜
− ⎟⎝ C2 ⎠ ⎜ 0
R3 ⎠
⎝
⎞
0 ⎟
⎟⎛⎜ v a ⎞⎟
1 ⎟⎜⎝ vb ⎟⎠
R3 ⎟⎠
Sistema MIMO con matriz D diferente de 0.
EJEMPLO 1.9
Plantear las ecuaciones de estado para un sistema Lineal Variante con el tiempo.
Las ecuaciones de los componentes:
vR1 (t ) = R1 (t )iR1 (t )
φ1 (t ) = L1 (t )i1 (t )
q (t ) = C (t )v(t )
φ2 (t ) = L2 (t )i2 (t )
vR2 (t ) = R2 (t )iR2 (t )
Tomando como variables de estado:
φ1 en L1 , φ2 en L2 y q2 en C
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
37
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
La ecuación de corriente de nodo (KCL):
•
q + i1 + i2 = 0
(1)
•
q = −i1 − i2
•
φ (t ) φ (t )
q=− 1 − 2
L1 (t ) L2 (t )
La ecuación de voltaje de malla 1 (KVL):
vC = v1 + iR1 R1 (t ) + eS
Como:
iR1 = i1 =
•
φ1 =
(2)
φ1 (t )
L1 (t )
1
R (t )
q(t ) − 1 φ1 (t ) − eS
C (t )
L1 (t )
La ecuación de voltaje de malla 2 (KVL)
vC = v2 + iR2 R2 (t )
Como:
φ (t )
iR2 = i2 = 2
L2 (t )
•
φ2 =
(3)
1
R (t )
q (t ) − 2 φ2 (t )
L2 (t )
C (t )
En notación matricial:
⎛
⎛ •⎞ ⎜ 0
⎜q⎟ ⎜
⎜ •⎟ ⎜ 1
⎜ φ1 ⎟ = ⎜ C (t )
⎜ φ• ⎟ ⎜
⎜ 2⎟ ⎜ 1
⎝ ⎠ ⎜
⎝ C (t )
1
L1 (t )
R (t )
− 1
L1 (t )
−
0
1 ⎞
⎟
L1 (t ) ⎟⎛ q ⎞ ⎛ 0 ⎞
⎟⎜ ⎟ ⎜ ⎟
0 ⎟⎜ φ1 ⎟ + ⎜ − 1⎟eS
⎟⎜ ⎟ ⎜ ⎟
R2 (t ) ⎟⎝ φ2 ⎠ ⎝ 0 ⎠
−
L1 (t ) ⎟⎠
−
b). Plantear el caso anterior empleando v e i como variables de estado.
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
38
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
De la ecuación 1:
dC (t )v(t )
= −i1 − i2
dt
•
•
= C (t ) v(t )+ C (t ) v(t ) = −i1 − i2
•
C (t )
1
1
v(t ) = −
v(t ) −
i1 −
i2
C (t )
C (t )
C (t )
•
De la ecuación 2:
dL1 (t )i1 (t )
= v c − i1 R1 (t ) − e s
dt
•
L1 (t ) i1 (t ) + i1 (t )
dL1
= vc − i1 R1 (t ) − es
dt
•
L (t )
R (t )
1
1
i1 (t ) = − 1 i1 (t ) − 1 i1 (t ) +
vc −
es
L1 (t )
L1 (t )
L1 (t )
L1 (t )
•
De la ecuación 3:
dL2 (t )i 2 (t )
= vc − i2 R2 (t )
dt
•
L2 (t ) i 2 (t ) + i2 (t )
dL2
= vc − i 2 R2 (t )
dt
•
L (t )
R (t )
1
i 2 (t ) = − 2 i 2 (t ) − 2 i 2 (t ) +
vc
L2 (t )
L2 (t )
L1 (t )
•
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
39
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
⎛
⎞
⎜
⎟
⎜
⎟
•
1
1
⎜ C (t )
⎟
−
−
⎜ − C (t )
⎟
C
t
C
t
(
)
(
)
•
⎜
⎟
⎞
⎛
⎛•
⎞
⎜ vC (t ) ⎟ ⎜
⎟⎛ v ⎞ ⎛⎜ 0 ⎞⎟
⎜
⎟
•
⎟ ⎜ 1
⎜
L1 (t ) + R1 (t ) ⎟
⎟⎜ ⎟ ⎜
1 ⎟
−⎜
e
0
⎜ i1 ⎟ + −
⎜ i1 (t ) ⎟ = ⎜
⎟
⎜ L1 (t ) ⎟ S
⎜
⎟
L1 (t )
⎜
⎟
⎜ • ⎟ ⎜ L1 (t )
⎟
i
⎜
⎟
⎜
⎟
⎜ i2 (t ) ⎟ ⎜
⎝
⎠
⎟⎝ 2 ⎠ ⎝ 0 ⎠
⎠
⎝
⎜
⎞⎟
⎛•
⎟
⎜
⎜ 1
L 2 (t ) + R2 (t ) ⎟ ⎟
⎜
⎜
⎟
−
0
⎜
⎟⎟
L2 (t )
⎜ L2 (t )
⎜
⎟⎟
⎜
⎠⎠
⎝
⎝
Las matrices del sistema son variantes en el tiempo, y es más sencilla la formulación
empleando (q φ1 φ 2 ) T como vector de estado: No aparecen las derivadas de los elementos
en la matriz A(t ) .
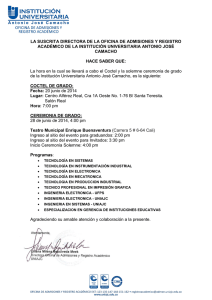
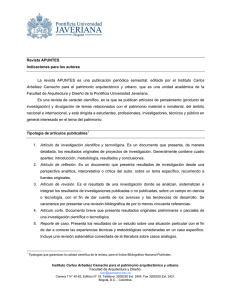
EJEMPLO 1.10 En el circuito U 1 y U 2 son fuentes de voltaje y corriente y R1 y R2 son
resistencias no lineales definidas por:
R1 :
i1 = G (v1 ) = v1
R2 :
v 2 = γ (i2 )
3
con γ dado en la figura.
a) Plantear las ecuaciones de estado. La salida es el voltaje en la inductancia.
b) Para las entradas dadas ( U 1 =1v y U 2 =27A) encontrar el estado de equilibrio
•
•
•
X e = ( X 1e X 2 e X 3e ) tal que X 1 = X 2 = X 3 = 0
a) Las variables de estado son:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
40
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
vc1 = x1
vc 2 = x 2
i L = x3
KVL en la malla de entrada:
v1 = U 1 − vc1 ;
3
i1 = G (v1 ) = v1 = (U 1 − vc1 ) 3
KCL para el nodo 1
U 2 + i1 = ic1 + i 2
dvc1
= U 2 + G (v1 ) − i2
dt
•
x1 = − x3 + (U 1 − x1 ) 3 + U 2
(1)
KVL para la malla de L.
vc1 = vc 2 + v L + v 2
vc1 = vc 2 + L
di L
+ v2
dt
•
x3 = x1 − x 2 + γ x3
(2)
KCL para el condensador C 2
i 2 = ic 2 = C 2
dvC 2
dt
•
x 2 = x3
(3)
De KVL el voltaje sobre la inductancia es:
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
41
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
v L = vc1 − vc 2 − v 2
la ecuación de salida :
y = x1 − x 2 − γ x3
b) Tomando el punto de equilibrio para el cual
•
x1 = 0 ⇒
x3 + (U 1 − x1 ) 3 + U 2 = 0
•
x2 = 0 ⇒
x3 = 0
•
x1 − x 2 + γ x3 = 0
x3 = 0 ⇒
Como x3 = I 2 = 0 de la característica de v 2 − i2 se encuentra que v 2 = 2 = r ( x3 )
x1 − x 2 + 2 = 0
y
(U 1 − x1 ) 3 + U 2 = 0
⇒
(U 1 − x1 ) 3 = −U 2
(U 1 − x1 ) 3 = −27
U 1 − x1 = 3 − 27 = −3
x1 = 4
x1 + 2 = x 2
⇒
x2 = 6
El punto de equilibrio es:
X e = (4 6 0) con entradas
T
U e = (1 27 )
T
En el punto de operación la ecuación para v 2 es
v 2 = γ (i2 ) = i2 + 2
= x3 + 2
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
42
REV. 02
C. COTRINO B.
ENERO 2007
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA – DEPARTAMENTO DE ELECTRONICA
SISTEMAS DINÁMICOS
APUNTES DE CLASE
SISTEMAS DINAMICOS
PARTE I – SESIÓN 01
43
REV. 02
C. COTRINO B.
ENERO 2007