Plan de Investigación: Sensores Viales para Movilidad Eléctrica
Anuncio

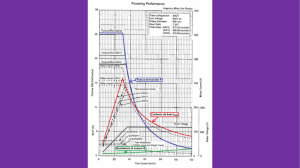
PLAN DE INVESTIGACIÓN TÍTULO Diseño e implementación de nuevos sensores viales basados en espiras magnéticas y su aplicación en vehículos eléctricos de movilidad personal. DOCTORANDO Dr. Ferran Mocholí Belenguer DIRECTORES Dr. Vicente Traver Salcedo, Dr. Antonio Mocholí Salcedo CONTEXTUALIZACIÓN La transformación del transporte es una realidad [1]. Las nuevas tecnologías aplicadas a la automoción, el big data y la economía compartida están cambiando la forma en la que la población se acerca al mundo del transporte [2]. De hecho, en los últimos años hemos sufrido una masiva y revolucionaria proliferación de vehículos eléctricos de movilidad personal en las principales capitales mundiales que ha obligado a redactar rápidamente diversas normativas para controlar y gestionar su uso de manera eficiente y poder así garantizar una convivencia segura con el resto de usuarios [3]. No obstante, además de las ordenanzas municipales anteriores, en los últimos años también se han elaborado otras muchas políticas de carácter medioambiental, tecnológico y social [4]. El objetivo principal de éstas básicamente es el de convertir las ciudades convencionales en grandes Smart Cities en las que el número de vehículos de combustión se reduzca drásticamente en los próximos años (siendo éstos sustituidos precisamente por vehículos eléctricos y vehículos de movilidad personal). Además, se desea que éstas apuesten cada vez más por las energías renovables (reduciendo así la contaminación en las mismas), ofrezcan una mayor calidad de vida y posibiliten la existencia de una gran cantidad de dispositivos conectados a Internet (Internet of Things), de tal forma que las ciudades queden así prácticamente sensorizadas. La aplicación directa de estas ordenanzas al campo de la gestión vial se traducirá inminentemente en la remodelación de la infraestructura de tráfico "clásica". Teniendo en cuenta que las carreteras cubren una gran parte de las áreas urbanas, el futuro a esperar es que la gran cantidad de tecnologías emergentes acaben por convertir este elemento, actualmente pasivo, en algo mucho más productivo. En consecuencia, si hace unos años ésta se limitaba meramente a componentes físicos como semáforos, paneles de mensajería variable y señales de tráfico instalados únicamente en carreteras urbanas, la futura infraestructura vial se verá obligada a incluir nuevos componentes, sensores y sistemas inteligentes tanto en vías urbanas como en los actuales carriles bici desarrollados específicamente para los vehículos de movilidad personal [5]. Sin embargo, a pesar de la aparición de estas nuevas formas de transporte y las pertinentes restricciones de velocidad y seguridad impuestas en las diversas y recientes normativas municipales, todavía no existen sistemas diseñados y testados sistemáticamente para controlar, gestionar y verificar el impacto y el correcto cumplimiento de las mimas. Así como sí existen diferentes sensores viales de referencia destinados para tales fines en calzadas urbanas [6], actualmente no es posible discriminar sistemáticamente la tipología de vehículos de movilidad personal ni determinar de manera precisa la velocidad a la que éstos se desplazan. Además, se debe tener en cuenta otro problema añadido, y es que estas velocidades establecidas en las respectivas ordenanzas municipales, varían a su vez en función del tipo de vehículo y de si éstos transcurren por calzadas o por aceras [7], lo cual complica considerablemente el escenario. Esta proliferación de vehículos de movilidad personal ha tenido un fuerte impacto y una gran acogida en las principales ciudades de todo el mundo, ya que éstos resultan económicos, ligeros, respetuosos con el medioambiente y, además, no requieren permisos para poder circular con ellos. Sin embargo, la realidad oculta muestra que su adaptación está resultando un tanto problemática. De hecho, el incesable incremento de estos vehículos y su coexistencia con el resto de usuarios y medios de transporte empieza ya a tener su reflejo en los datos de siniestralidad, y es que el número de accidentes producidos por los vehículos de movilidad personal en los últimos años se ha ido incrementando paulatinamente [8]. En consecuencia, la eficiente gestión y control del tráfico en las principales ciudades se está convirtiendo en todo un gran reto para los órganos responsables de la movilidad y el orden público. Además, las recientes ordenanzas de peatonalización y restricción de tráfico todavía han complicado más la situación, ya que éstas han decretado zonas en las que la circulación mediante vehículos de movilidad personal está terminantemente prohibida, por lo que se requeriría también de sistemas de control de acceso que gestionasen y verificasen dicha imposición. En conclusión, parece evidente que se requeriría de un conjunto de nuevos modelos de sensores viales y sistemas inteligentes destinados específicamente a los vehículos de movilidad personal capaces de: Controlar y gestionar su uso eficientemente. Proporcionar niveles de seguridad óptimos. Verificar el cumplimiento de las normativas vigentes. Garantizar la correcta convivencia de éstos junto con el resto de usuarios de la vía pública. ANTECEDENTES Y ESTADO ACTUAL Actualmente existen una gran cantidad de sensores viales basados en diferentes tecnologías para la monitorización de datos viales básicos como la cantidad y tipo de vehículos que circulan en calzadas urbanas, la velocidad a la que éstos circulan o la dirección en la que lo hacen [9]. Sin embargo, aunque la infraestructura vial ha variado significativamente en los últimos años, resulta sorprendente observar como las espiras magnéticas continúan dominando las instalaciones de tráfico. Muchas de ellas incluso forman parte de los algoritmos más recientes e innovadores desarrollados para la gestión del tráfico de las principales ciudades [10]. Las espiras magnéticas se introdujeron masivamente a principios de la década de 1960 y son uno de los sensores más comunes en las carreteras de todo el mundo debido a su simplicidad, efectividad y bajo coste. De hecho, éstas se han convertido prácticamente en los sensores viales de referencia. Esto se debe principalmente a que dichos detectores han demostrado ser muy eficientes y completos con el paso de los años , ya que aparte de su aplicación principal destinada a contabilizar y clasificar vehículos, la cual incluye autobuses, camiones, automóviles y motocicletas [11], éstos también se utilizan para medidas de velocidad [12], control de accesos [13], estimación de densidad del tráfico [14], peajes en sombra [15], e incluso para realizar comunicaciones bidireccionales entre vehículos e infraestructura [16]. El funcionamiento de estos sensores se basa en la variación de inductancia que se registra en las espiras durante el paso de los vehículos sobre éstas. Estos detectores se entierran en el pavimento y se instalan de manera estratégica para que formen parte de un circuito oscilador junto a una unidad electrónica que se ubica habitualmente en la acera. De esta manera, cuando un vehículo o cualquier objeto construido con materiales ferromagnéticos atraviesa el campo magnético generado por estos sensores, se produce una disminución del campo magnético global debido a las corrientes parásitas inducidas en el vehículo, las cuales provocan a su vez una disminución de la inductancia de la espira [6]. La Figura 1 muestra el principio básico de funcionamiento de éstas. Figura 1. Esquema de un sistema basado en espiras magnéticas. Así pues, como las espiras magnéticas forman parte de un circuito oscilador, el punto de partida para la detección y extracción de información se basa principalmente en la observación de la frecuencia de oscilación del sistema completo, la cual viene dada por una expresión del tipo [16]: 𝑓= 𝑘 𝐿 donde 𝑘 es una constante que depende de las características de los componentes electrónicos utilizados en la construcción del circuito oscilador y 𝐿 es la inductancia de la espira expresada en Henrys. Luego, se observa que como la inductancia es inversamente proporcional a la frecuencia, cuando los vehículos circulen sobre las espiras, se producirá una disminución de inductancia que conllevará a su vez un incremento de la frecuencia de oscilación. Figura 2. Perfiles magnéticos reales de (a) un coche, (b) una furgoneta, (c) un autobús y (d) un camión. De esta manera, lo interesante de estos sensores recae fundamentalmente en obtener lo que comúnmente se denomina “el perfil magnético del vehículo”, el cual se obtiene tras analizar y trazar la variación de frecuencia en función del tiempo registrada durante el paso de éstos sobre los sensores. Este perfil magnético depende principalmente de parámetros relacionados con el vehículo, como por ejemplo la longitud, la posición del motor o el número de ejes. Luego, resulta extremadamente provechoso que éste sea diferente para cada tipo de vehículo, ya que esto permite contabilizarlos, clasificarlos, estimar la densidad del tráfico y controlar el acceso de éstos a determinadas zonas. La Figura 2 muestra el perfil magnético característico de los cuatro grupos mayoritarios de vehículos convencionales. Sin embargo, en este momento su potencial no estaba siendo del todo explotado, ya que ni siquiera la velocidad o la longitud de los vehículos podía ser estimada mediante el uso de una sola espira. Esta es la razón por la que habitualmente la gran mayoría de ellas tan solo venían siendo utilizadas para medir el flujo de tráfico y contabilizar vehículos [17]. Para estimar la velocidad de un vehículo y poder clasificarlo, se requería de dos espiras individuales, ya que una sola no era capaz de obtener todos los parámetros necesarios. Esto es debido a que, tras analizar el perfil magnético del vehículo, nos encontrábamos con dos incógnitas (longitud y velocidad de éste) con la variación de un solo parámetro (frecuencia de oscilación). Por ello, generalmente se instalaban dos bucles magnéticos por carril separados una cierta distancia. En consecuencia, cuando en el año 2015 empecé a trabajar en el grupo de investigación de Sistemas de Control de Tráfico perteneciente a la Universidad Politécnica de Valencia (Instituto ITACA) y observé el problema que esto suponía, planteamos el diseño e implementación de un nuevo modelo de sensor vial basado en las anteriormente descritas espiras magnéticas “clásicas” que mejorasen las prestaciones de las mismas. El nuevo detector se bautizó como “espira magnética doble” [17-19], un sensor compuesto por la unión de dos espiras rectangulares, las cuales pueden tener diferentes dimensiones y número de vueltas (𝑁). La Figura 3 muestra el aspecto característico de éstas. Figura 3. Caracterización de una espira doble. Estos nuevos sensores mejoran las características y funcionalidades de la espira simple convencional sin incrementar el coste ni introducir complejidades adicionales. De hecho, algunas de las principales ventajas que éstas presentan frente a sus antecesores modelos son las siguientes: Presentan una electrónica más simple, compacta y económica. Permiten averiguar todos los parámetros viales con el uso de una sola espira. Reducen el margen de error en el cálculo de la velocidad a un 6% (frente al 20% ofrecido por los sistemas duales compuestos por dos espiras separadas). Ayudan a disponer de una información mucho más precisa sobre el estado de las carreteras, lo cual facilita la gestión del tráfico desde los centros de control. Reducen el coste de instalación y mantenimiento prácticamente a la mitad. Agilizan el sistema de detección y medición, ya que en lugar de trabajar con dos señales como en los sistemas duales, esta configuración tan solo trabaja con una sola señal. Los resultados que se obtuvieron mediante estos sensores en diferentes ensayos con vehículos de combustión clásicos fueron excelentes. Prueba de ello son las diversas publicaciones en revistas científicas de alto impacto que se lograron [17-21]. Por ello, creemos firmemente que este nuevo modelo de sensor podría también aplicarse y ser de gran ayuda para gestionar y controlar eficientemente el uso de los anteriormente descritos vehículos de movilidad personal que tantos quebraderos de cabeza están provocando hoy en día. HIPOTESIS Y OBJETIVO A ALCANZAR Hipótesis: - El diseño de configuraciones óptimas de sensores basados en espiras magnéticas dobles instalados en carriles bici, hará posible la extracción de todo tipo de información sobre los distintos vehículos de movilidad personal e incluso la realización de comunicaciones bidireccionales entre éstos y la infraestructura desarrollada. Esto permitirá, al igual que ocurre con los vehículos de combustión convencionales, caracterizar y clasificar en tiempo real estas nuevas formas de transporte, lo cual permitirá gestionar su uso y el control de accesos de los mismos de manera segura y cautelosa. Así pues, la velocidad, el sentido de circulación e incluso la detección de peligros potenciales podrá averiguarse rápidamente, evitando así infracciones y posibles accidentes. Además, se plantean también soluciones sonoras combinadas con las medidas anteriormente descritas con el objetivo de evitar situaciones de peligro y percances en las proximidades de las intersecciones, las cuales representan el principal punto de conflicto de estos nuevos vehículos. Objetivos: - Objetivo general: Diseño, desarrollo y validación de un sensor vial adaptado a carriles bici basado en espiras magnéticas para la caracterización de vehículos de movilidad personal, el cual ayudará en la gestión y control de los mismos y servirá de apoyo para sistemas inteligentes destinados a reducir los accidentes producidos por la coexistencia de éstos con el resto de usuarios. - Objetivo específico 1: Análisis y diseño del sensor vial basado en espiras magnéticas dobles de dimensiones reducidas para así poder ser instalado en carriles bici. Ello conllevará el diseño e implementación del circuito oscilador y del sistema de procesado de señal. - Objetivo específico 2: Modelización, caracterización y extracción de parámetros viales a nivel de laboratorio de diferentes vehículos de movilidad personal. Ello conllevará la realización de pruebas sistemáticas mediante la infraestructura desarrollada y un posterior análisis de los datos. - Objetivo específico 3: Validación del sensor y del modelo en entornos urbanos. Ello conllevará la puesta en marcha del sistema en varios puntos estratégicos de la Universidad Politécnica de Valencia y el análisis y estudio de su comportamiento. - Objetivo específico 4: Diseño e implementación de sistemas inteligentes que se sustenten en la tecnología anteriormente desarrollada con el objetivo de alertar de posibles situaciones de peligro, evitando así accidentes e incrementando la seguridad vial de todos los usuarios. Ello conllevará el desarrollo de pequeños sistemas sonoros instalados en las intersecciones de tal manera que éstos emitan sonidos de alerta en aquellas situaciones en las que las espiras previamente instaladas y testadas detecten peligros potenciales (como por ejemplo, un vehículo circulando a velocidad excesiva, en sentido contrario o por lugares donde no debería). METODOLOGÍA A UTILIZAR La metodología de trabajo propuesta se basa en cuatro fases secuenciales, cada una de las cuales, responde respectivamente a los objetivos específicos planteados. Además, el resultado de cada fase es utilizado como entrada de la siguiente. Fase 1. Diseño del sensor vial basado en espiras magnéticas dobles y el sistema de procesado de señal. Las espiras magnéticas convencionales utilizadas en carreteras urbanas tienen unas características y unas dimensiones apropiadas y específicas para tal fin. Tanto es así que, el diámetro del cable utilizado para su instalación y las dimensiones de éstas se han convertido en todo un estándar a nivel mundial: 14 AWG y 2𝑥2 metros. Sin embargo, aunque sí se han instalado diferentes modelos de espiras en carriles bici alrededor de todo el mundo y es más que obvio que éstas deben ser de menores dimensiones, todavía no existen modelos de referencia testados para este tipo de escenarios. En consecuencia, el primer paso a realizar se centrará en el estudio y análisis de diferentes configuraciones de espiras con el objetivo de averiguar cuál de ellas resulta más adecuada. Para ello, se implementarán y se trabajará con tres modelos de espiras dobles. De acuerdo con la nomenclatura de la Figura 3, éstos serán: Diseño 1 Diseño 2 Diseño 3 N1 2 N1 2 N1 3 N2 2 N2 2 N2 2 Dimensiones 48x32 centímetros Dimensiones 68x32 centímetros Dimensiones 48x32 centímetros Una vez tengamos implementadas las tres espiras, nos ocuparemos de la unidad electrónica. Y es que para detectar, contabilizar y clasificar vehículos mediante espiras magnéticas, se requiere de un circuito oscilador que produzca una señal periódica. En entornos reales se utiliza generalmente un circuito oscilador LC, el cual proporciona señales sinusoidales, pero para la realización de este nuevo sensor vial se diseñará un circuito oscilador RL que proporcione a la salida señales cuadradas y que mejore las prestaciones del anterior. Esta motivación se debe básicamente a que este tipo de señales son más fáciles de tratar y que el circuito RL permite la conexión de 4 espiras simultáneas, con lo que reduciríamos la cantidad de equipamiento necesario en la vía. En consecuencia, se espera que nuestro diseño siga una estructura similar a la que se presentó en [20] y que esté compuesto por: Una fuente de tensión continua de 5V. Un circuito integrado CD4093BE compuesto por cuatro puertas NAND Trigger-Schmitt. Un transistor BC107A. Una resistencia R y una bobina L (la espira magnética doble). A continuación se desarrollará el sistema de adquisición y procesado de señal, el cual se diseñará e implementará de manera ad-hoc. Si bien es cierto que podríamos recurrir a tarjetas de adquisición comerciales con buenas prestaciones, el propósito del proyecto es que el sistema sea replicable, escalable e instalable en carriles bici, por lo que la propuesta metodológica se centrará en diseñar el sistema desde cero de manera completa. Además, la opción anterior incrementaría notablemente el presupuesto, provocando que la posterior instalación del sistema en entornos urbanos reales resultase inviable. La frecuencia de oscilación de los sistemas basados en espiras magnéticas instalados en carreteras convencionales para el conteo y clasificación de vehículos clásicos de combustión se encuentra habitualmente entre los 100-200 kHz. Sin embargo, se estima que el rango de frecuencias de oscilación para los nuevos modelos de espira se situará alrededor de los 400-500 kHz, siendo el principal motivo de este aumento la reducción de tamaño. Luego, basándonos en la experiencia previa, sabemos que requeriremos de una alta resolución en frecuencia para poder detectar con suficiente precisión todas las desviaciones de frecuencia que se observen en el sistema. El teorema de Nyquist-Shannon indica que el límite inferior debería ubicarse alrededor de 1MHz, pero, dado que el objetivo es tener una óptima resolución, se diseñará el sistema de tal manera que éste tenga una frecuencia de muestreo todavía mayor. El sistema, ademá,s almacenará en su memoria los datos recopilados, dejando también la puerta abierta a realizar procesados en tiempo real. Luego, es comprensible que nuestra hipótesis requerirá de sistemas con altas prestaciones y rendimiento, y en este contexto, las perspectivas presentes y futuras apuntan hacia soluciones System on a Chip (SoC) como productos que integran procesadores y lógica programable a coste reducido. De hecho, existen ya numerosas aproximaciones en campos tan dispares como la inteligencia artificial, las comunicaciones de alta velocidad y la seguridad informática. Este tipo de sistemas deben lidiar con la barrera entre lenguaje sintetizable (RTL) y de verificación con lenguajes de más alto nivel (java, C#, Python o C++), pero para este fin, se pretende utilizar una familia de placas muy potentes con herramientas de diseño propias como la PYNQ-Z1 de Xilinx, la cual incorpora un procesador de silicio y una FPGA. Mediante este dispositivo se programarán con Python, y consecuentemente, se ejecutarán, todas las tareas anteriormente descritas. Además, una de las ventajas de la PYNQ-Z1 es que gracias a su FPGA, en un futuro se podría crear una red neuronal con los perfiles magnéticos de los vehículos. Fase 2. Caracterización y extracción de parámetros de diferentes vehículos de movilidad personal. La movilidad urbana está experimentando tantos cambios en tan poco tiempo que la DGT se ha visto obligada a elaborar la "Instrucción 16 / V-124" sobre "Vehículos de Movilidad Personal" para catalogar estas nuevas formas de transporte que surgen casi a diario y enriquecen la oferta de medios con los que moverse por las ciudades. Esta instrucción distingue entre: Vehículos 'Tipo A': incluye vehículos de movilidad personal de dimensiones más pequeñas como patinetes eléctricos pequeños y ruedas y plataformas eléctricas. Vehículos 'Tipo B': incluye los vehículos de movilidad personal de mayores dimensiones como los patinetes eléctricos grandes y seqways. Vehículos 'Tipo C0': incluye los vehículos de más de dos ruedas que se utilizan para el uso personal. Vehículos 'Tipo C1': incluye los vehículos de más de dos ruedas que se utilizan para realizar transporte de personas. Vehículos 'Tipo C2': incluye los vehículos de más de dos ruedas destinados al transporte de mercancías. Figura 5. Clasificación de vehículos de movilidad personal según la Dirección General de Tráfico. En consecuencia, de igual manera que se conocen con exactitud los perfiles magnéticos de los principales vehículos convencionales de tracción mecánica (Figura 2), el objetivo principal de esta fase se centrará en caracterizar magnéticamente todos y cada uno de los vehículos de movilidad personal que aparecen reflejados en la reciente instrucción de la DGT. Ello conllevará la realización de diferentes pruebas sobre los distintos modelos de espiras magnéticas implementados mediante los diferentes vehículos de movilidad personal. Así pues, de manera sistemática y siguiendo un protocolo previo, se hará pasar los vehículos sobre las espiras a diferentes velocidades. Finalmente, se realizará un exhaustivo análisis de todos los perfiles magnéticos obtenidos con la finalidad de extraer la mayor información posible de ellos: velocidad, dirección, tipología, números de identificación, etc… Fase 3. Validación del sensor y del modelo en entornos urbanos. Una vez dispongamos de toda la información anterior, se realizará un estudio similar al de la Fase 2, pero en este caso, en entornos urbanos reales. Para ello, se instalarán las diferentes configuraciones de espiras magnéticas dobles anteriormente descritas en distintos emplazamientos. En consecuencia, se habilitarán pequeños armarios y cabinas, cada uno de ellos situado en un emplazamiento diferente, desde los cuales nuestro grupo de investigación realizará tareas de medición diarias. El objetivo de esta fase se centrará en comprobar que los resultados obtenidos a nivel de laboratorio coinciden con los resultados obtenidos en entornos reales. No obstante, si éstos difiriesen, estaríamos en la fase adecuada para averiguar el motivo y darle solución. Además, en este punto sería dónde se empezaría a desarrollar el sistema de alerta sonoro, de manera que éste fuera capaz de distinguir por sí solo y de manera eficiente la tipología de vehículo, la velocidad e incluso el sentido de circulación. Fase 4. Implementación de sistemas inteligentes para evitar accidentes. Cuando el sistema se encuentre testado y en pleno y correcto funcionamiento, se plantea la opción de diseñar y añadir un pequeño sistema inteligente para evitar posibles accidentes. El sistema propuesto es realmente sencillo, pero estamos totalmente seguros de que resultaría efectivo para evitar los accidentes que este tipo de vehículos provocan diariamente. Éste funcionaría del siguiente modo: Se instalaría una espira magnética en las proximidades de las intersecciones que fuesen catalogadas como peligrosas. Esta espira magnética tendría almacenada información sobre el tipo de vehículos y la velocidad a la que pueden circular por dicho carril. Cuando pasase un vehículo sobre ella, ésta analizaría su tipología y calcularía su velocidad. El sistema compararía dichos resultados con los almacenados según la ordenanza municipal. En el caso de que se superase la velocidad establecida, se tratase de un vehículo que no puede circular por dicha vía o se circulase en dirección contraria, se activaría un sonido en la misma intersección, alertando así tanto a peatones como a conductores. MEDIOS A UTILIZAR El grupo de investigación dispone actualmente de: Equipamiento de un laboratorio de electrónica (multímetros, fuentes de alimentación, generadores de señales, analizador de espectros, y componentes pasivos y activos). Un regulador de tráfico, una central de comunicaciones, una Estación Remota Universal (ERU), un panel de mensaje variable y un banco de pruebas de sistemas de control de tráfico. Diversos sistemas de control de tráfico: espiras, laser, ultrasonido, IR y radar. Una estación de trabajo con licencias para programas de gestión de datos y diseño electrónico. Vehículos de movilidad personal de tipo A, B y C. Dos placas PYNQ-Z1. Infraestructura para el desarrollo de placas de circuito impreso. PLANIFICACION TEMPORAL Y UTILIDAD DE LA INVESTIGACION La planificación temporal del proyecto se ha distribuido por semestres de la siguiente forma: Semestre 1 – Tarea 1, Tarea 2 y Tarea 6. Semestre 2 – Tarea 2, Tarea 3 y Tarea 6. Semestre 3 – Tarea 3, Tarea 4, Tarea 5 y Tarea 6. REFERENCIAS [1] - A. Gutierrez, "Ciudades envenenadas por el tráfico," Tráfico y Seguridad Vial. Dirección General de Tráfico, nº 239, pp. 34-36, 2017. [2] - R. H. Goudar, H. N. Megha, "Next generation intelligent traffic management system and analysis for smart cities", Proceedings of the 2017 International Conference on Smart Technology for Smart Nation, 2017. [3] - Dirección General de Tráfico, "Instrucción 16 / V-124 sobre Vehículos de Movilidad Personal,"2016. [4] - Red Eléctrica de España y Federación Española de Municipios y Provincias (FEMP), "Guía de movilidad eléctrica para entidades locales," Congreso de Movilidad Sostenible, Bilbao, 2019. [5] - J. Perdiguero, and J. Luis Jiménez, "Policy options for the promotion of electric vehicles: a review", Institut de Recerca en Economia Aplicada Regional i Pública Document de Treball, 2014. [6] - L. A. Klein, D. R. P. Gibson, and M. K. Mills, Traffic Detector Handbook, vol. FHWAHRT-06-108, Federal Highway Administration, U.S. Department of Transportation, 2006. [7] - Ayuntamiento de Valencia, "Ordenanza de movilidad," 2019. [8] - Fundación Línea Directa, "El número de fallecidos en accidentes con patinetes eléctricos se triplicará en 2019," 2019. [9] - P. Burnos, J. Gajda, Z. Marszalek, P. Piwowar, R. Sroka, M. Stencel, et al., "Road traffic parameters measuring system with variable structure," Metrology and Measurement Systems; vol. 18, no. 4, pp. 659–666, 2011. [10] - S. Meta and M.G. Cinsdikici, "Vehicle-classification algorithm based on component analysis for single-loop inductive detector," IEEE Transactions on Vehicular Technology; vol. 59, no. 6, pp. 2795–2805, 2010. [11] - Y.K Ki and D.K.Baik, "Vehicle-classification algorithm for single-loop detectors using neural networks," IEEE Transactions on Vehicular Technology; vol. 55, no. 6, pp. 1704–1711, 2006. [12] - Y.K Ki and D.K.Baik, "Model for accurate speed measurement using double-loop detectors," IEEE Transactions on Vehicular Technology; vol. 55, no. 4, pp. 1094–1101, Jul, 2006. [13] - J. Gajda, P. Piwowar, R. Sroka, M. Stencel, and T. Zeglen, "Application of inductive loops as wheel detectors," Transportation Research Part C: Emerging Technologies; vol. 21, no. 1, pp. 57–66, 2012. [14] - A. Mocholi Salcedo, J.H. Arroyo Núñez, V. Milian Sanchez, M.J. Palomo Anaya, A. Arroyo Núñez, "Magnetic field generated by the loops used in traffic control systems," IEEE Transactions on Intelligent Transportation Systems; vol. 18, no. 8, pp. 2126–2136, Aug 2017. [15] - M.K Mills, "Self-Inductance Formulas for Multi- Turn Rectangular Loops Used with Vehicle Detectors," 33rd IEEE VTG Conference Record, May 1983, pp. 64–73. [16] - J.H. Arroyo Núñez, A. Mocholí Salcedo, R. Barrales Guadarrama, and A. Arroyo Núñez, "Communication between magnetic loops," Proceedings of 16th World Road Meeting, Lisbon, Portugal, May 2010. [17] - F. Mocholí Belenguer, A. Mocholí Salcedo, A. Guill Ibañez, and V. Milián Sánchez, "Advantages offered by the double magnetic loops versus the conventional single ones," PLoS ONE 14(2): e0211626, 2019. [18] - F. Mocholí Belenguer, A. Mocholí Salcedo, V. Milián Sánchez, and J.H. Arroyo Núñez, "Double Magnetic Loop and Methods for Calculating Its Inductance," Journal of Advanced Transportation; vol. 2018, Article ID 6517137, 15 pages, 2018. [19] - F. Mocholí Belenguer, A. Martínez Millana, A. Mocholí Salcedo, and V. Milián Sánchez, "Vehicle modeling for the analysis of the response of detectors based on inductive loops," PLoS ONE, 2019, doi.org/10.1371/journal.pone.0218631. [20] - A. Mocholí Salcedo, J.H. Arroyo Núñez, V. Milián Sánchez, G.J. Verdú Martín, and A. Arroyo Nuñez, "Traffic Control Magnetic Loops Electric Characteristics Variation Due to the Passage of Vehicles Over Them," IEEE Transactions On Intelligent Transportation Systems, vol. 18, no. 6, pp. 1540–1548, 2017. [21] - F. Mocholí Belenguer, A. Martínez-Millana, A. Mocholí Salcedo and J. H. Arroyo Núñez, "Vehicle Identification by Means of Radio-Frequency-Identification Cards and Magnetic Loops," in IEEE Transactions on Intelligent Transportation Systems. doi: 10.1109/TITS.2019.2948221