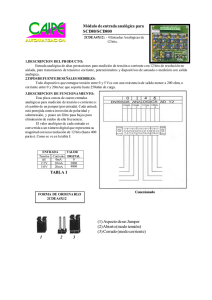
10 Comprueba tus conocimientos 1. Cuando el funcionamiento de una operación automática se realiza con la alimentación principalmente de relés y contactores: Es Lógica programada. Es lógica cableada. Es lógica automática. Ninguna de las anteriores. 7. La señal de un anemómetro, utilizará el módulo del autómata: Módulo de salida analógica. Módulo de comunicaciones. Módulos de entrada analógica. Módulo de entrada digital. 8. La señal de final de carrera, utilizará el módulo del autómata: 1 13. Un Byte, ¿cuántos bits, tiene? 1. 4. 8. 16. 14. Una palabra (word), ¿cuántos bits tiene? 2. ¿Cómo se llamo el primer autómata comercializado? ADLON. MODLON. MODICON. Ninguna de las anteriores. 3. El término “PLC”, quiere decir: Controlador lógico de cables. Controlador lógico de relés. Controlador lógico de memorias. Controlador lógico programable. 4. Si una instalación cuenta con un número de sensores superior a 5, y es susceptible de modificar con frecuencia, se debe utilizar: Lógica cableada, basada en relés y contactores. Lógica programada, basada en autómatas programables. Si la instalación tiene menos de 50 dispositivos de entradasalida, se usarán relés y contactores. Lo que resulte más económico en la instalación inicial. 5. De las afirmaciones que aparecen a continuación, referidas a las operaciones que puede realizar un PLC, indica cuáles son falsas. Elige dos. Realiza operaciones aritméticas. Realiza operaciones con salidas analógicas. Su CPU es muy superior a la de un PC. Se puede programar en diferentes lenguajes de programación. Puede manejar un número ilimitado de entradas y salidas. Se puede utilizar de manera remota. 6. Aunque no es una afirmación que esté claramente definida, según algunas empresas, un autómata será “micro”: Cuando el número de entradas-salidas no es superior a 128. Cuando dispone de menos de 2 entradas analógicas. Cuando dispone de una salida analógica. Cuando el número de entradas-salidas no es superior a 32. Módulo de salida analógica. Módulo de comunicaciones. Módulos de entrada analógica. Módulo de entrada digital. 9. La señal de un detector capacitivo, utilizará el módulo del autómata: Módulo de salida analógica. Módulo de comunicaciones. Módulos de entrada analógica. Módulo de entrada digital. 10. De los sensores que se muestran a continuación, elige tres que son activos. Detector de posición. Detector inductivo. Célula fotoeléctrica. Interruptor. Sónar. Pulsador. 11. Un dispositivo que transforma una magnitud física, en una señal -generalmente eléctrica- que posteriormente será tratada es: Conversor de señales. Transductor. Autómata programable. Transistor. 12. En un módulo de salidas de un PLC, ¿cuál es el dispositivo principal en su constitución, para que los receptores conectados funcionen a corriente continua, y tengan conmutaciones muy rápidas? Relés. Triacs. Transistores. Diodos. 8. 16. 32. 64. 15. Direccionamiento de entradas. Cuando una entrada tiene siempre la misma dirección, por ejemplo I0.0., se trata de: Direccionamiento fijo. Direccionamiento variable. 16. El proceso en el cual el autómata realiza un análisis del estado de las entradas, consulta al programa, y actualiza el estado de las salidas es: Proceso de actualización. Ciclo de programa. Ciclo actualizador. Proceso interno de actualización. 17. Para programar autómatas programables. Elige tres. Se puede usar una consola de programación de la marca. Se puede usar en PC estándar, con el software adecuado. Tiene que hacerse siempre con unidades de programación específicas de la marca del autómata. Existe un cable común para todos los autómatas. Algunos microPLCs, se programan directamente sin necesidad de programas. 18. Si leemos I10.4. Es una variable de entradas digitales. Es una variable de marcas. Es una variable de salidas analógicas. No es ninguna variable. 19. Las variables, que se usan como relés internos dentro del autómata, se suelen llamar: Memorias internas. Relés internos. Marcas. Temporizadores. 10 Comprueba tus conocimientos 2 20. ¿Qué muestra la propiedad Conmutativa, según el álgebra de Boole? 25. Si encontramos un bloque funcional con el siguiente cronograma, ¿de qué elemento se trata? Tx A+ B =A· B A· B =A+ B A+ B = B +A A- B = B ·A Un temporizador con retardo a la activación. Un temporizador con retardo a la desactivación. Un temporizador con retardo a la activación-desactivación. Un contador ascendente-descendente. Postulado. Teorema. 22. Según este circuito, elije la tabla de la verdad que se corresponde. B A = C B 0 0 1 1 0 0 1 1 C 0 1 0 1 0 1 0 1 S 0 0 0 0 0 1 1 1 31. Si en un lenguaje de programación de PLCs, encuentro el texto “WHILE”, el lenguaje es: T1 T2 21. Una proposición, cuya verdad se admite sin pruebas, aunque éstas son necesarias, para posteriores razonamientos, es: A 0 0 0 0 1 1 1 1 IN A 0 0 0 0 1 1 1 1 B 0 0 1 1 0 0 1 1 C 0 1 0 1 0 1 0 1 S 0 1 0 1 1 1 0 1 A 0 0 0 0 1 1 1 1 B 0 0 1 1 0 0 1 1 C 0 1 0 1 0 1 0 1 S 0 0 1 1 0 1 1 1 A 0 0 0 0 1 1 1 1 B 0 0 1 1 0 0 1 1 26. ¿Qué bloque funcional implica a su salida un “1” lógico permanente, si en su entrada ha existido un impulso? Un temporizador con retardo a la activación. Un bloque SET-RESET. Un temporizador con retardo a la activación-desactivación. Un contador ascendente-descendente. SALIDA C 0 1 0 1 0 1 0 1 S 0 0 1 1 1 1 0 0 23. Si encontramos un bloque funcional con el siguiente cronograma, ¿de qué elemento se trata? IN T Un temporizador con retardo a la activación. Un temporizador con retardo a la desactivación. Un telerruptor. Un contador ascendente-descendente. 27. La operación flanco positivo, implementa un “1” lógico a su salida: Ladder. Texto estructurado ST. Lista de instrucciones IL. Grafcet. 32. Dentro del Grafcet, ¿qué implica una acción, dentro del proceso secuencial? Una etapa. Una transición. 33. ¿Qué quiere decir HMI? Diálogo máquina-máquina. Programación de máquinas. Diálogo hombre-máquina. Es un tipo de alarma en programación de autómatas. 34. ¿Qué es un OPC? Cuando la entrada pasa de “1” a “0”. Cuando la entrada pasa de “0” a “1”. 28. Comparadores. Elige dos que no son. Mayor o igual que. Menor que, más 1. Igual que. Igual a, menos 1. Menor o igual que. Es un lenguaje de programación para autómatas. Es una marca de autómatas. Es un programa Scada. Es un programa “driver”, para que un autómata se pueda comunicar con un sistema basado en Scada. 35. ¿Qué es un deslizador “slider”? 29. Un pulsador S1 con contacto NA, conectado a la entrada digital I1 de un autómata programable. ¿Es lo mismo, el contacto abierto del pulsador S1, que el contacto en programación I1? Sí, a todos los efectos. Sí, solo mientras I1 sea abierto. Sí, sólo mientras I1 sea cerrado. No. I1 es una representación de S1, pero no tiene porqué ser Igual. 30. ¿Qué significa este “círculo”? 24. ¿Qué norma IEC, estable 4 lenguajes de programación, dos textuales y dos gráficos, más el grafcet? 1131. 1160. 1134. Un borne de conexión. Una función inversora NOT, en representación reducida. Un borne que está siempre a “1”. Un borne que está siempre a “0”. I5 & I6 AND Una representación gráfica de una señal analógica variable, por ejemplo el estado de llenado de un depósito. Una imagen dentro de una pantalla táctil o programa Scada. Un control virtual, para programas Scada, similares a los Potenciómetros. Un programa de pantallas táctiles. 36. Sensores analógicos industriales. Elije tres afirmaciones. Pueden tener salida a intensidad. El autómata mide sus datos en formato bit. El programa del autómata mide sus datos en formatos tipo 16 bits. Su valor dentro del programa se puede convertir y acondicionar aritméticamente. Se tienen que alimentar obligatoriamente a corriente continua. Cuando tienen salida a tensión los valores oscilan de 100 a 150 V DC. 10 Ejercicios 1. 3 ¿Qué símbolo corresponde a las “cajas” vacías? I1 I1 I2 I1 I1 Q1 I2 I3 I2 Q1 I3 I1 I2 I2 Q I3 I3 I3 I1 Q1 I1 I1 I2 & AND I2 I3 I2 I1 I3 I2 Q1 Q I3 I3 I1 & AND I1 I1 I2 I1 I4 I2 I5 I3 I1 I2 Q1 I3 I4 I5 Q1 I2 I2 I1 I2 I1 I2 & AND I3 I1 Q1 Q1 I4 I2 I5 & AND 10 Ejercicios 4 2. Según el siguiente esquema de mando, referido a la inversión Tabla de equivalencia de sentido de giro “brusca” de un motor trifásico, determina una programación afín para los lenguajes LD y FBD. Realiza una tabla de equivalencia entre dispositivos (pulsadores, contactores, relés, lámparas...), y el tipo de variables empleadas (I1, I0.4, etc.). 24 V AC L 2 3 4 Variable I1 I2 I3 I4 KM1 - H1 Q1 KM2 - H2 Q2 H0 Q3 5 97 L 95 L 1 Componente F2 S0 S1 S2 11 98 1 96 F2 Programación en LD 2 13 KM 1 KM1_MOTOR DIRECTO I1 I2 I3 I4 Q1 6 22 S2_INVERSO S1_DIRECTO KM1_MOTOR INVERSO I1 I2 I4 I3 Q2 X1 X1 A1 6 4 N A2 X2 N N Avería Ámbar C 4 Figura 10.1159. Esquema de mando Del circuito a automatizar. X2 X1 X2 S0_PARO Q1 2 Inverso Roja A F2_R. TÉRMICO H0 KM 2 N Directo Verde 2 S2_INVERSO 7 5 24 5 14 21 11 4 12 A1 N A2 H2 KM 1 C S1_DIRECTO Línea 2 H1 A S0_PARO Q1 S2 N F2_R. TÉRMICO KM 2 3 14 3 14 S1 Línea 1 23 2 2 13 13 2 12 S0 Denominación Relé térmico Pulsador de paro Pulsador sentido directo Pulsador sentido inverso Contactor e indicativo luminoso motor sentido directo Contactor e indicativo luminoso motor sentido inverso Avería por sobre carga Línea 3 F2_R. TÉRMICO AVISO, AVERÍA POR RELÉ TÉRMICO I1 Q3 10 Ejercicios 5 Programación en LD I1 Relé térmico 97 N0 98 NO 95 STOP 2T1 NC & 96 NC RESET 4T1 6T1 AND Pulsador I2 S0 parada Q1 Motor sen- tido directo Pulsador I3 S1 Directo 1 Q1 OR I4 1 I1 Relé térmico 97 N0 98 NO 95 STOP 2T1 NC & 96 NC RESET 4T1 6T1 AND Pulsador I2 S0 parada Q2 Motor sen- tido inverso Pulsador I4 S2 Inverso 1 Q2 OR I3 1 Q3 Avería por relé termico I1 Relé térmico 97 N0 98 NO STOP 2T1 95 NC RESET 4T1 6T1 96 NC 1 10 Ejercicios 6 X1.1-2 Alimentación entradas del PLC a 24 V DC 24 V DC X1.3-4 0V X2.1 X2.3 2 4 4 13 [S1] Pulsador marcha sentido directo S2 S2 14 [S0] Pulsador de paro general S2 13 [F2] Relé térmico F2 2 X2.7 14 QF2 PIA 10 A X2.5 3 13 QF1 PIA 10 A 1 13 3 14 1 14 Según el esquema empleado en el ejercicio anterior, realiza el cableado en el PLC propuesto de la siguiente figura. El conexionado de componentes debe corresponderse con las programaciones descritas anteriormente. L N PE L N PE 3. [S2] Pulsador marcha sentido inverso Respuesta: X2.4 X2.6 X2.8 I1 I2 I3 I4 X2.2 G1 L+ N + + - - PLC propuesto para el caso L+ M PE I1 I2 I3 I4 I5 I6 I7 I8 Input: AC 100-240V T1 RUN ERROR Alimentación: 24 V DC. Fuente de alimentación 230 / 24 V DC. Módulo de entradas: 10 entradas digitales a 24 V DC. POWER 230 V AC Transformador para alimentar salidas digitales del autómata 230 / 24 V AC. Módulo de salidas digitales: 8 salidas digitales a relé. 24V ok PLC A 1 B A Q4 X3.1 Q5 Q6 Q7 Q8 Q5 Q3 Q4 X1 Q1 Q2 Q3 Q2 Q1 COM Regleteros X1. Alimentación G1 y T1 a 230 V AC. X2. Dispositivos en entrada de autómata fuera del cuadro eléctrico a 24 V DC. X3. Dispositivos de salida de autómata fuera del cuadro a 24 V AC. X4. Circuito de potencia a 400 V AC + N + PE. 24 V AC X3.2 Contactor KM1 motor sentido directo e indicativo luminoso H1 X2 H2 A2 X2 H1 X3.4 Contactor KM2 motor sentido inverso e indicativo luminoso H2 X1 H0 X2 A1 A1 X3.5 X3.3 X1 24 V AC A2 Alimentación salidas PLC 24 V AC Output: DC 24V/1,3 A I9 I10 X3.6 Indicativo luminoso H0 sobre avería por sobrecarga del motor 10 Ejercicios 7 4. Realiza el Grafcet, de una programación que realice lo siguiente: - Al presionar un pulsador S1, se activará el motor 1. - Pasados 5 segundos, hará lo propio el motor 2, desactivándose el primero. - Pasados 10 segundos, se excitará el motor 3, anulándose el segundo. - Pasados 15 segundos, se conexionará el motor 4, parándose el tercero. - Pasados 20 segundos, se detiene el motor 4. El proceso comenzará presionado de nuevo S1. 5. Realiza una programación en LD, usando funciones SET-RESET, que cumplan los condicionantes del ejercicio anterior. Línea 1. PULSADOR I1 MOTOR 2 Q2 T1 0 T1 TON 5 seg. R Línea 2. Pulsador de marcha MOTOR 1 Q1 RS S MOTOR 2 Q2 RS S T2 TON S1 Transición 1 MOTOR 3 Q3 R 1 10 seg. Motor 1 Motor 1 TON Transición 2 5 seg. T2 2 Motor 2 Línea 3. Motor 2 TON Transición 3 MOTOR 4 Q1 R 10 seg. 3 Motor 3 T3 TON 15 seg. Motor 3 TON Transición 4 Línea 4. 15 seg. 3 Motor 4 MOTOR 3 Q3 RS S Motor 4 T3 TON MOTOR 4 Q4 RS S T4 TON Transición 5 20 seg. T4 R 20 seg. 10 Ejercicios 8 7. Según el cableado de los sensores y actuadores del autómata programable, mostrado en la siguiente página, determina los esquemas de los regleteros de los dispositivos que aparecen. 27500 / 20 = 1375 PE QF1, 1 Trafo T1, PE Neutro 6 QF2, N Línea a 230 V AC 5 QF2, 1 PE 4 FA-G1, PE Neutro 3 QF1, N Línea a 230 V AC 2 18 19 20 21 MOD-AI, M PLC, I6 PLC, I1 DT-GAS, 13 DTC-COMÚN, 13 DTC-PLAS, 13 S1, 13 TERMÓMETRO FA-G1, POS PE 17 PLC, AI1 INT-MAN, 14 PLC, M FA-G1, NEG DT-GAS, 14 16 TERMÓMETRO DTC-PRESION, 14 15 FA-G1, POS DTC-COMÚN, 14 14 TERMÓMETRO DTC-PLAS, 14 13 PE S1, 14 12 MOD-AI, PE FA-G1, POS 11 FA-G1, NEG FA-G1, POS 10 MOD-AI, L+ FA-G1, POS 9 PLC, I5 FA-G1, POS 8 PLC, I4 FA-G1, POS 7 PLC, I3 FA-G1, POS 6 PLC, I2 PE 5 INT-MAN, 13 FA-G1, NEG 4 DTC-PRESION, 13 FA-G1, POS 3 PLC, L+ 2 Destino A 1 Nº Destino B 0 V ----------------- 10 V 0 bits -----------27500 bits AI1 1 Cable REGLETERO X2 C) A partir de este momento, la variable MW10 es equivalente al valor de la presión, y la cifra sólo oscilará entre 0 y 20. Nº Cable MW10 Sensores de entrada hacia el PLC y alimentación PLC 1375 Destino A DIVIDIR AI1 REGLETERO X1 A) Suponemos que el sensor analógico utiliza la entrada analógica AI1, del autómata. B) Como el valor máximo a registrar es 20; debemos dividir el valor máximo que aporta el sensor 27500 / 20 = 1375. El resultado se almacena en la variable de marcas MW10. Destino B Cable Alimetación, FA y transformador 6. Un sensor de presión analógico con salida a tensión 0-10 V DC, aporta al módulo de entrada analógica del PLC una señal que oscila entre 0 y 27500 bits. ¿Qué operaciones aritméticas se han de hacer para que el valor de la presión oscile entre 0 y 20? Cable Cable Destino A TRAFO-T1, L1 PLC, Q1 PLC, Q2 PLC, Q3 PLC, Q4 PLC, Q5 PLC, Q6 TRAFO-T1, L2 H1, X2 H2, X2 Y1, A2 Y2, A2 H3, X2 H4, X2 Nº 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Destino B PLC, 2L+ H1, X1 H2, X1 Y1, A1 Y2, A1 H3, X1 H4, X1 PLC, 2M TRAFO-T1, L2 TRAFO-T1, L2 TRAFO-T1, L2 TRAFO-T1, L2 TRAFO-T1, L2 TRAFO-T1, L2 REGLETERO X3 0 V ----------------- 10 V 0 bits ----------- 200 bits MW10 Salidas del PLC Cable