ÉCARLOS
00-CALCULO II-iniciales - Copia.indd 5
22/04/2019 07:41:35
Cálculo II / Máximo Mitacc, Víctor Cárdenas, Ismenia Roncal y Félix Villanueva.
Primera edición, primera reimpresión. Lima: Universidad de Lima, Fondo Editorial,
2019.
555 páginas: diagramas, gráficos. (Colección Textos Universitarios).
Bibliografía: página 555.
1. Cálculo integral. 2. Cálculo integral -- Problemas, ejercicios, etc. I. Mitacc-Meza,
Máximo, autor. II. Cárdenas-De-la-Cruz, Víctor-Daniel, autor. III. Roncal-Casanova,
Ismenia-Soledad, autora. IV. Villanueva-Santos, Félix-Ricardo, autor. V. Universidad
de Lima. Fondo Editorial.
515.43
C ISBN 978-9972-45-473-8
Colección Textos Universitarios
Cálculo II
Primera edición: noviembre, 2018
Primera reimpresión: mayo, 2019
Tiraje: 1000 ejemplares
© De esta edición:
Universidad de Lima
Fondo Editorial
Av. Javier Prado Este 4600,
Urb. Fundo Monterrico Chico, Lima 33
Apartado postal 852, Lima 100, Perú
Teléfono: 437-6767, anexo 30131
fondoeditorial@ulima.edu.pe
www.ulima.edu.pe
Diseño, edición y carátula: Fondo Editorial de la Universidad de Lima
Imagen de portada: Olga Salt/Shutterstock.com
Impreso en el Perú
Se prohíbe la reproducción total o parcial de este libro, por cualquier medio,
sin permiso expreso del Fondo Editorial.
ISBN 978-9972-45-473-8
Hecho el depósito legal en la Biblioteca Nacional del Perú n.o 2019-
00-CALCULO II-iniciales - Copia.indd 6
22/04/2019 08:24:20
Índice
Presentación
Capítulo 1. Integral definida e integral impropia
1.1 Integral definida
1.2 Teoremas fundamentales del cálculo integral
1.3 Integrales impropias
1.4 Revisión del capítulo
9
11
13
27
58
74
Capítulo 2. Aplicaciones de la integral definida
2.1 Área de una región plana
2.2 Volumen de un sólido de revolución
2.3 Longitud de arco
2.4 Revisión del capítulo
89
91
108
141
151
Capítulo 3. Superficies
3.1 Superficie cilíndrica
3.2 Superficies cuádricas
3.3 Revisión del capítulo
175
177
185
222
Capítulo 4. Funciones reales de varias variables
4.1 Funciones reales de varias variables
4.2 Límite y continuidad de una función de dos variables reales
4.3 Revisión del capítulo
235
237
263
276
Capítulo 5. Derivadas de funciones de varias variables
5.1 Derivadas parciales de funciones reales de dos variables
5.2 Diferencial de una función de varias variables
5.3 Regla de la cadena
5.4 Derivada direccional de una función de varias variables
5.5 Revisión del capítulo
291
293
328
351
365
388
Capítulo 6. Máximos y mínimos de funciones de varias variables
6.1 Extremos no condicionados de una función de varias variables
6.2 Máximos y mínimos condicionados
6.3 Revisión del capítulo
409
411
431
452
Capítulo 7. Integral doble
7.1 Integral doble
7.2 Volumen de un sólido en el espacio R3
7.3 Revisión del capítulo
465
467
489
514
Respuestas a los ejercicios y problemas propuestos
529
Bibliografía
555
Índice
7
Presentación
En la comunidad educativa existe consenso acerca de la importancia del cálculo
diferencial e integral por su contribución tanto al desarrollo del pensamiento
científico como a la formación de las personas, debido a que es una poderosa herramienta que simplifica la solución de problemas complicados mediante reglas
y procedimientos sencillos.
En este libro, continuación de Cálculo I, previamente publicado por dos de
sus autores, hemos desplegado nuestra mejor experiencia docente para elaborar
un material educativo que facilite el aprendizaje de la integral definida de una
función de una variable y sus aplicaciones, superficies, y el cálculo diferencial e
integral de funciones de varias variables, de modo que el estudiante trabaje en
forma independiente para alcanzar los siguientes objetivos:
• Calcular e interpretar la integral definida de una función de una variable.
• Utilizar la integral definida como herramienta para calcular:
– Integrales impropias.
– El área de una región plana.
– El volumen de un sólido de revolución.
– La longitud de un arco de curva.
• Graficar superficies cuádricas y cilindros rectos.
• Determinar el dominio, el límite, la continuidad y las derivadas parciales
y direccionales de una función de varias variables.
• Utilizar las derivadas parciales para resolver problemas de razón de
cambio, de cálculo de aproximados de incrementos y de optimización.
• Calcular la integral doble y usarla para hallar el volumen de un sólido
en el espacio.
Para que los estudiantes desarrollen sus capacidades y sus conocimientos en
el cálculo diferencial e integral a partir del análisis de datos y casos, los temas
del texto se presentan considerando las siguientes estrategias:
• Al inicio de cada capítulo se indican los temas por tratar, los conocimientos
previos necesarios para el aprendizaje y las competencias por alcanzar.
• En cada sección los nuevos conceptos son presentados de una forma clara
y su comprensión es reforzada con diversos ejemplos.
Presentación
9
• Al final de cada sección se resuelven y se proponen ejercicios y problemas
con el objetivo de afianzar el aprendizaje de los temas presentados.
• En la última sección de cada capítulo se resuelven y se proponen
ejercicios y problemas para integrar los conocimientos adquiridos a lo
largo del capítulo.
El libro está organizado en siete capítulos, cada uno de ellos dividido en secciones de acuerdo con los principales temas que se desarrollan en la asignatura
de Cálculo 2 que se imparte en la Facultad de Ingeniería y Arquitectura de la
Universidad de Lima.
El primer capítulo se inicia con el estudio de la integral definida, destacando
sus propiedades y los teoremas fundamentales del cálculo integral. Luego se tratan las integrales impropias en las que el intervalo de integración tiene longitud
infinita o la función integrando presenta discontinuidad infinita en el intervalo
de integración.
El segundo capítulo trata sobre algunas aplicaciones de la integral definida:
área de una región plana, volumen de un sólido de revolución y longitud de arco
de una curva.
En el tercer capítulo se estudian dos tipos de superficies en el espacio: cilindros rectos y superficies cuádricas.
En el cuarto capítulo se desarrollan las funciones reales de dos y tres variables, se determinan y grafican sus respectivos dominios, curvas de nivel y
superficies de nivel. También se calculan límites y se determina la continuidad
de una función de dos variables reales.
En el quinto capítulo se estudian las derivadas parciales y direccionales
destacándose su interpretación geométrica y su aplicación como razón de
cambio. También se trata el diferencial total y se abordan sus aplicaciones al
cálculo de errores e incrementos.
En el sexto capítulo se determinan los extremos locales de una función
real de varias variables y su aplicación en problemas de optimización con
y sin restricciones.
En el séptimo capítulo se estudian las integrales dobles de una función de
dos variables y su aplicación al cálculo del volumen de un sólido en el espacio.
Expresamos nuestra gratitud y agradecimiento a los docentes que nos acompañan en el dictado de la asignatura, quienes dedicaron su valioso tiempo para
revisar el texto y sugerir algunos cambios para una mejor comprensión de
los temas; en especial a los profesores Johnny Avendaño Quiroz y Humberto
Gálvez Pérez.
Como todo trabajo es susceptible de errores, agradecemos anticipadamente a
los colegas y alumnos que gentilmente nos alcancen sus observaciones, sugerencias o correcciones para permitirnos mejorar este material.
Los autores
10
Cálculo II
Capítulo
1
Integral definida
e integral impropia
En este capítulo se trata el concepto de integral definida de una función y su cálculo a
través de los teoremas fundamentales que
relacionan las operaciones de derivación e
integración.
También se determina la convergencia
o divergencia de una integral impropia
mediante el uso de la integral definida.
Sabes
Capacidades necesarias:
ü Calcular el límite de una función.
ü Reconocer la continuidad de una
función en un intervalo.
ü Hallar la derivada de una función
ü Graficar funciones.
ü Determinar la integral indefinida de
una función.
Conocimientos previos
Gráficas de funciones algebraicas y
trascendentes.
Límite, continuidad, derivada e integral
indefinida de una función.
Piensas
Habilidades por desarrollar:
ü Calcular la integral definida de una
función.
ü Derivar una función definida en
términos de una integral con límites
variables.
ü Establecer la convergencia o diver-
Secciones
gencia de una integral impropia.
1.1 Integral definida
1.2 Teoremas fundamentales del
cálculo integral
1.3 Integral impropia
1.4 Revisión del capítulo
Haces
Competencias por alcanzar:
ü Resolver ejercicios y problemas que
involucran el cálculo de integrales
definidas o integrales impropias.
El concepto de integral definida surgió para resolver el problema de calcular
el área de una región plana limitada por curvas. La geometría elemental nos
permite calcular el área de una región poligonal o de una región circular, pero
si la región es como las que se muestran en la figura 1.1, no es posible utilizar
las fórmulas elementales para calcular sus áreas.
Este problema fue resuelto simultáneamente por Newton y Leibniz en el siglo XVII. Ellos determinaron la relación entre los conceptos de integral definida
y derivada de una función, lo que permitió resolver el problema.
Sin embargo, el concepto de integral definida no solo está ligado al cálculo
del área de una región plana, sino que es aplicable a diferentes áreas del conocimiento. Así, por ejemplo, permite estudiar algunos fenómenos físicos, como
la presión de un líquido, el centro de gravedad de una figura plana o el trabajo
que realiza una fuerza al mover un objeto desde un punto A hasta otro punto
B. En economía se utiliza para calcular el coeficiente de Gini, que expresa la
desigualdad en la distribución de ingreso o el excedente del consumidor o del
productor, entre otros factores. También se aplica en la psicología para estudiar
las curvas de aprendizaje, en la estadística para estudiar las probabilidades y
en la geometría para calcular el volumen de un sólido de revolución, la longitud de una curva o el área de una superficie de revolución.
Y
0
a
X
b
P [ a ≤ Z ≤ b]
Fig. 1.1
12
Cálculo II
1.1 Integral definida
Para calcular el área de la región plana que se muestra en la figura
1.1.1, se divide el intervalo [a; b] en n subintervalos y en cada uno
de ellos se levanta un rectángulo. Luego, la suma de las áreas de
las regiones rectangulares es un valor aproximado del área de la
región plana (figura 1.1.2). Cuando n toma valores muy grandes di­
cha aproximación es cada vez más cercana al área de la región; esta
se obtiene en el límite cuando n tiende a infinito. Este proceso se
describe a continuación.
YY
y == ff(x)
(x)
aa
0O
X
bb X
Fig. 1.1.1
Fig. 1.1.1
YY
Partición de un intervalo
yy== ff(x)
(x)
Una partición de un intervalo cerrado [a; b] ⊂ es cualquier con­
junto finito de números=
reales P {x0 ; x1 ; x2 ; …; xn} , donde
=
a x0 < x1 < x2 … < xn−1 < x=
b
n
x0 = a
0
x1
x2
x3 x4 = b
Fig. 1.1.2
a = x0
x1
x2
...
xn–1
Fig. 1.1.2
xn = b
XX
Observación 1
a) Una partición
=
P {x0 ; x1 ; x2 ; …; xn} del intervalo cerrado
[a; b] , divide al intervalo en n subintervalos de la forma
[xi −1 ; xi ] ,=i 1, 2, … , n .
a = x0
x1 ... xi–1
xi
...
xn–1
xn = b
=
[a; b]
[x0 ; x1] … [xn−1 ; xn ]
La longitud de cada uno de estos subintervalos está dada por
∆xi = xi − xi −1, para
=
i 1, 2, … , n.
Así, ∆x1 = x1 − x0 , ∆x2 = x2 − x1 , … , ∆xn = xn − xn−1
y se verifica
n
∑ ∆xi = ∆x1 + ∆x2 + … + ∆xn = b − a.
i =1
b) El máximo entre los números ∆x1 , ∆x2 , … , ∆xn ; corres­
pondientes a una partición P del intervalo [a; b] , se denomi­
na norma o diámetro de la partición P y se representa por
P , esto es
Los números ∆x1 , ∆x2 , … , ∆xn no
necesariamente son iguales.
Cuando el intervalo [a b] se divide
en n partes iguales, la longitud de
cada subintervalo es
∆=
x
b−a
=
n
P
P = max {∆xi / i =1, 2, … , n} .
Capítulo 1. Integral definida e integral impropia
13
Los subintervalos de la partición P2
se presentan en la siguiente tabla
xi −1 ; xi
∆xi = xi − xi −1
9
2; 4
1
∆x1 =
4
9
4 ; 3
3
∆x2 =
4
10
3; 3
1
∆x3 =
3
10
3;
4
2
∆x4 =
3
9
4; 2
1
∆x5 =
2
9
2 ; 5
1
∆x6 =
2
26
5; 5
1
∆x7 =
5
26
5 ; 6
4
∆x8 =
5
Ejemplo 1
Dados el intervalo I = [2; 6] y las particiones
P1
=
2; 3; 4; 5; 6} , P2
{=
10
9
26
9
; 6 y
2; ; 3; ; 4; ; 5;
3
2
5
4
P3 = {2; 4; 6} del intervalo I , se tiene:
La partición P1 = {2; 3; 4; 5; 6} divide el intervalo I en cuatro
6−2
subintervalos de longitud ∆
=
x
= 1, esto es
4
[2; 6] = [2; 3] [3; 4] [4; 5] [5; 6] y P1 =∆x =1 .
10
9
26
9
En cambio, la partición P2 = 2; ; 3;
; 4; ; 5;
; 6
3
2
5
4
divide al intervalo I en ocho subintervalos que no son de igual
4
longitud. La mayor de estas longitudes es P2 = .
5
La partición P3 = {2; 4; 6} divide al intervalo I en dos subin6−2
tervalos de longitud igual a ∆
=
x
= 2, esto es
2
[2; 6] = [2; 4] [4; 6]
P3 =∆x =2.
y
Suma de Riemann
Sean f una función continua en el intervalo I = [a; b] ,
=
P {x0 ; x1 ; x2 ; …; xn} una partición de I y mi cualquier número
que pertenezca al intervalo [xi −1 ; xi ]=
, i 1, 2, … , n.
m1
a = x0
mi
x1 ... xi–1
mn
xi
...
xn–1
xn = b
La suma de Riemann SR de f asociada a la partición P y a los
, i 1, 2, … , n es
puntos seleccionados mi ∈ [xi −1 ; xi ] =
n
SR = ∑ f (mi ) ∆xi = f (m1 ) ∆x1 + f (m 2 ) ∆x2 + … + f (mn ) ∆xn .
i =1
Geométricamente, cuando f (mi ) > 0, el término f (mi ) ∆xi de la
suma de Riemann representa el área de la región rectangular Ri li­
mitada por las rectas x = xi −1 , x = xi , y = 0 e y= f (mi ) (figura 1.1.3).
Cuando f (mi ) < 0, el término f (mi ) ∆xi de la suma de Riemann
es un número negativo, por lo que el área de la región rectangular
Ri es − f (mi ) ∆xi (figura 1.1.4).
14
Cálculo II
Y
Y
y = f(x)
y = f(x)
− f (mi ) ∆xi
xi – 1f (mi )x>i 0 ,
f (mi ) > 0,
0
X
f (mi ) > 0,
Ri
0
xi – 1 f (mi ) x>i 0 ,
− f (mi ) ∆xi
Si f ( x) > 0 para todo x ∈ [a; b] en­
tonces la suma de Riemann tiene
todos sus términos positivos y por
lo tanto es positiva.
Si f ( x ) < 0 para todo x ∈ [a; b] en­
tonces la suma de Riemann tiene
todos sus términos negativos y por
lo tanto es negativa.
Ri
X
A(Ri) = –− f (mi ) ∆xi
A(Ri) =− f (mi ) ∆xi
YY
Fig. 1.1.3
Fig. 1.1.4
ii ) > 0 ,
f (m
nn
n
XX
Por consiguiente, geométricamente la suma de
∆
++0xO ff (+m
x
=) ∆∑
mfi )(m
∆xx)i ∆==x ffaa+(m
mf11)(m∆
∆
m…
∆
…
S Riemann
= ∑ f SS(m
+xxf2 (++
m…
) ∆++xff .(mmnn )bb∆∆xxn ..
R =
1∆
2)∆
∑x ff =(m
2x)
R
n
SR= ∑ f (mi ) ∆xi
i =1
Ri
i
ii==11
i
1i
i =1
1
1
21
2
2
2
n
n
n
n
Fig. 1.1.5
Fig.
1.1.5
representa la suma de las áreas de las regiones rectangulares que
están encima del eje X menos la suma de las áreas de las regiones
rectangulares que están debajo del eje X (figura 1.1.5).
Ejemplo 2
Dada la función
f (=
x)
1 2
x − 4 , x ∈=
I
4
(
)
[0; 4]
a) Halle la suma de Riemann de f para la partición
4 8
P1 = 0; ; ; 4 .
3 3
Seleccione mi como el extremo izquierdo de cada subintervalo.
b) Calcule la suma de Riemann de f para la partición
P2 = {0; 1; 2; 3; 4} . Seleccione como mi el punto medio de cada
subintervalo.
Solución
4 8
a) Como la partición P1 = 0; ; ; 4 divide al intervalo I en tres
3 3
partes de igual longitud, la longitud de cada subintervalo es
4−0 4
∆xi =∆x =
=
3
3
4 4 8 8
y [0; 4] =0; ; ; 4
3 3 3 3
En la siguiente tabla se muestran los extremos izquierdos
mi de cada subintervalo y sus respectivos valores f (mi ) .
Capítulo 1. Integral definida e integral impropia
15
Y
Y
i
[xi −1 ; xi ]
mi =xi −1
1
4
0; 3
m1 =0
2
4 8
3 ; 3
4
m2 =
3
3
8
3 ; 4
8
m3 =
3
f (mi ) =
1 2
m −4
4 i
(
)
f (m1 ) =f (0) =−1
f (m
4
5
−
=
9
3
) =f
8 7
f (m=
f=
3)
3 9
La suma de Riemann es
3
)
f(x
x)
SR = ∑ f (mi ) ∆xi = f (m1 ) ∆x + f (m 2 ) ∆x + f (m3 ) ∆x
f(
y=
=
y
i =1
0O
XX
28
4 5 4 7 4
=(−1) + − + =−
27
3 9 3 9 3
En la figura 1.1.6 se muestran los rectángulos, cuyas
áreas se utilizan para calcular geométricamente la suma de
Riemann.
Fig. 1.1.6
Fig. 1.1.6
b) La partición P2 = {0; 1; 2; 3; 4} divide al intervalo I en cuatro
partes de igual longitud; la longitud de cada subintervalo es
En la figura 1.1.7 se muestran los
rectángulos para hallar la suma de
Riemann para el ejemplo 2b.
Los puntos medios mi de cada subintervalo y sus
respectivos valores f (mi ) se muestran en la siguiente tabla.
i
[xi −1 ; xi ]
x +x
mi = i −1 i
2
1
[0; 1]
1
m1 =
2
15
1
f (m1 ) =f =−
2
16
2
[1; 2]
3
m2 =
2
7
3
f (m 2 ) =f =
−
16
2
3
[2; 3]
5
m3 =
2
5 9
f (m=
f=
3)
2 16
4
[3; 4]
7
m4 =
2
7 33
f (m=
f=
4)
2 16
1
3
m1 =1m 2 =3
22
22
0
yy=
=f ( xf
) (x
)
Y
Y
4−0
∆xi =∆x =
=1 y [0; 4] =[0;1] [1; 2] [2; 3] [3; 4]
4
552
77
m3 =m
=2
24 2
Fig. 1.1.7
Fig. 1.1.7
16
Cálculo II
XX
f (mi ) =
1 2
m −4
4 i
(
)
Por consiguiente, el valor de la suma de Riemann es
4
SR = ∑ f (µi ) ∆xi = f (µ1 ) ∆x + f (µ 2 ) ∆x + f (µ3 ) ∆x + f (µ 4 ) ∆x
i =1
15
7
9
33
5
=
− (1) + − (1) + (1) + (1) =
16
16
16
16
4
Definición 1. Integral definida
Sean f una función continua en el intervalo cerrado [a; b] ,
=
P {x0 ; x1 ; x2 , … , xn} una partición de [a; b] y µi un número del
intervalo [xi −1 ; xi ] ,=
(i 1, 2, … , n) . La integral definida de f en el
intervalo [a; b] es el límite de la suma de Riemann SR , cuando la
norma de la partición P de [a; b] tiende a cero y se escribe
∫
b
a
n
f ( x=
SR lim ∑ f (µi ) ∆xi
) dx lim=
P →0
P →0 i =1
Si el intervalo [a; b] se divide en n subintervalos de igual
longitud, entonces
b−a
n
P =∆x =
Luego, en este caso afirmar que la norma P tiende a cero es
equivalente a decir que n tiende al infinito. Así, la integral definida
de f en el intervalo [a; b] es
∫
b
a
f=
(x) dx
n
lim ∑ f (µi ) ∆x
n→+∞ i =1
Observación 2
a) En la notación
∫
b
a
f ( x) dx , el número a es el límite inferior de
integración, el número b es el límite superior de integración
y f es la función integrando.
b) La integral definida de f en el intervalo [a; b] es un número
real que no depende de la variable de integración, es decir
∫
b
=
f ( x) dx
a
∫
b
=
f ( z) dz
a
∫
b
a
f (u) du
c) Si=
y f ( x ) ≥ 0, para todo x ∈ [a; b] , la suma de Riemann
n
SR= ∑ f (µi ) ∆xi
i =1
representa numéricamente la suma de las áreas de los rec­tán­
gulos que están encima del eje X (figura 1.1.8). Luego, la inte­
gral definida de la función f en el intervalo [a; b] representa
Capítulo 1. Integral definida e integral impropia
17
numéricamente el área de la región plana R limitada por
las gráficas de las ecuaciones y = f ( x) ,=
y 0=
, x a y x=b
(figura 1.1.9), esto es
Yy
f(x)
yy==f (x
)
A ( R) =
b
∫ f (x) dx
a
d) Si f ( x) < 0, para cada x ∈ [a; b] , la integral definida de la
0
x0 = a
x1
x2
Fig.
Fig.1.1.8
1.1.8
x3 x4 = b Xx
Yy
A ( R) = −
yy==f f(x)
(x)
R
R
0
a
Fig. 1.1.9
X
b
X
x
Yy
0
x
b
Fig. 1.1.9
a
función f en el intervalo [a; b] es un número negativo y el área
de la región plana R limitada por las gráficas de las ecuaciones
y = f ( x ) , y = 0 , x = a y x = b es numéricamente igual a
menos la integral definida de f (figura 1.1.10), esto es
b
∫ f (x) dx
a
e) Si la función f toma valores, tanto positivos como negativos
en el intervalo [a; b] (figura 1.1.11), la integral definida de la
función f en el intervalo [a; b] es numéricamente igual a la
suma de las áreas de las regiones que están encima del eje X,
menos la suma de las áreas de las regiones que están debajo
del eje X, esto es,
b
∫ f (x) dx = [A (R ) + A (R ) + A (R )] − [A (R ) + A (R )]
1
a
R
R
3
5
4
Yy
(x)
yy == ff(x)
f x
yy = f(x)
(
Fig. 1.1.10
Fig.
1.1.10
2
)
R
R55
R
R33
RR11
R22
R
0
R
R44
Xx
Fig. 1.1.11
Fig. 1.1.11
Ejemplo 3
Divida el intervalo [2; 4] en n subintervalos de igual longitud, tome como µi , el extremo derecho de cada subintervalo [xi −1 ; xi ]
y calcule la integral definida
4
∫ (x − 4) dx
2
2
como el límite de una suma de Riemann.
18
Cálculo II
Solución
Al dividir el intervalo [2; 4] en n partes iguales, la longitud de
cada subintervalo es
4−2 2
=
n
n
∆
=
x
Si se selecciona mi como el extremo derecho de cada
subintervalo [xi −1 ; xi ]=
, (i 1, 2 , … , n) , se tiene
mi = xi = 2 + i∆x = 2 +
2i
, i = 1, 2, … , n
n
xi = a + i∆x y
2
2i
Si f ( x=
) x − 4, entonces f (mi ) = 2 + − 4. Luego,
n
2
4
2
dx
∫ 2 (x − 4)=
=
I
xi −1 = a + (i − 1) ∆x, i = 1, 2, ..., n
n
lim ∑ f (mi ) ∆x
n→+∞ i =1
Fórmulas de sumatorias
n
n (n + 1)
∑i =
2
i =1
2
2
2i
= lim ∑ 2 + − 4
n→+∞ i =1
n
n
n
2 n 8i 4i 2
= lim ∑ +=
n→+∞
n i 1 n n2
=
=
=
Cuando el intervalo [a; b] se divi­
de en n partes iguales, los extre­
mos derecho e izquierdo de cada
subintervalo [xi −1 ; xi ] son respec­
tivamente
n
n (n + 1)(2n + 1)
i =1
6
2
∑i =
2 8 n
4 n
lim ∑i + 2 ∑i 2
n→+∞=
n n i 1 =
n i1
2 8 n (n + 1) 4 n (n + 1)(2n + 1)
2 + 2
n→+∞ n n
6
n
lim
lim
4 32
32 12
+ +=
3 n 3n2 3
n→+∞
Por consiguiente,
32
x 2 − 4) dx =
(
∫2
3
4
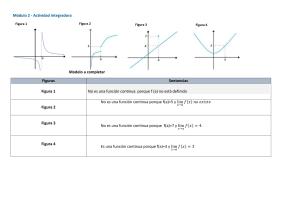
Ejemplo 4
La gráfica de la función f consta de segmentos de recta y una
semicircunferencia como se muestra en la figura 1.1.12.
Yy
44
R1
− 10 –8
−8
–10
y= f(x)
3
3
R3
0
−2
−
–44 –2
R2
2
2
10
10
55 66
R4
Xx
−–55
Fig. 1.1.12
Fig. 1.1.12
Capítulo 1. Integral definida e integral impropia
19
Use las fórmulas de áreas de la geometría plana para calcular
las siguientes integrales definidas.
a)
∫
2
b)
f ( x) dx
−10
∫
6
−2
f ( x) dx
c)
∫
10
−10
f ( x) dx
Solución
En la figura 1.1.12 se muestran cuatro regiones R1 , R2 , R3 y R4 ,
donde
i) R1 es limitada por un trapecio de altura de longitud 3 y ba­
ses paralelas de longitudes 8 y 4, cuya área en unidades
cuadradas es
1
A ( R1 ) = (8 + 4)(3) =18
2
ii) R2 es un semicírculo de radio de longitud 2, cuya área en
unidades cuadradas es
1
2
A ( R2 ) =π (2) =
2π
2
iii) R3 es una región triangular de altura de longitud 4 y base de
longitud 4, cuya área en unidades cuadradas es
=
A ( R3 )
1
=
(4)(4) 8
2
iv) R4 es limitada por un triángulo de altura de longitud 5 y
base de longitud 4, cuya área en unidades cuadradas es
=
A ( R4 )
1
=
(4)(5) 10
2
Luego, se tiene
∫
2
b)
∫
6
c)
∫
10
a)
f ( x) dx = A ( R1 ) − A ( R2 ) = 18 − 2π
−10
−2
f ( x) dx = A ( R3 ) − A ( R2 ) = 8 − 2π
−10
f ( x) dx = A ( R1 ) + A ( R3 ) − A ( R2 ) − A ( R4 ) = 16 − 2π
Definición 2. Casos singulares de la integral definida
Sea f una función continua en el intervalo [a; b] , con a < b.
a) Si los límites de integración inferior y superior son iguales, el
valor de la integral definida de f es cero, es decir
∫
20
Cálculo II
c
c
f ( x=
) dx 0 , c ∈ [a; b]
b) Si se intercambian los límites de integración, el valor de la
integral definida de f cambia de signo, esto es
a
b
b
a
∫ f (x) dx = −∫ f (x) dx
Propiedad 1. Propiedades de la integral definida
Sean f y g funciones continuas en el intervalo [a; b] . Luego,
a)
b)
b
b
a
a
∫ k f (x) dx = k ∫ f (x) dx, donde k es una constante real.
∫ [ f (x) ± g (x)] dx= ∫ f (x) dx ± ∫ g (x) dx
b
b
b
a
a
a
Yy
c) Si a < c < b, entonces
∫
b
∫
=
f ( x) dx
a
c
a
f ( x) dx +
b
∫ f (x) dx
(x)
yy ==f f(x)
c
Esta propiedad se conoce con el nombre de propiedad
aditiva con respecto al intervalo de integración [a; b]
(figura 1.1.13).
a
c
0
b
x
X
Fig. 1.1.13
Fig. 1.1.13
d) Si f ( x) ≥ 0 , para cada x ∈ [a; b] ; entonces
b
∫ f (x) dx ≥ 0
a
e) Si f ( x) ≤ g ( x) , para todo x ∈ [a; b] , entonces
b
b
a
a
Yy
∫ f (x) dx ≤ ∫ g (x) dx
f)
∫
b
a
f ( x) dx ≤
∫
b
a
f ( x) dx
g) Si m ≤ f ( x ) ≤ M para todo x ∈ [a; b] , donde m y M son el
mínimo y el máximo absolutos de f (figura 1.1.14), entonces
m (b − a) ≤
M
b
∫ f (x) dx ≤ M (b − a)
y y= =
f (xf(x)
)
m
a
0
– aa
bb −
b
Xx
Fig.
Fig.1.1.14
1.1.14
a
Teorema 1. Teorema del valor medio para una integral definida
m = valor mínimo de f ( x )
M = valor máximo de f ( x )
Si f es una función continua en el intervalo [a; b] , entonces existe un
número u ∈ [a; b] tal que
b
(x) dx
∫ f=
a
f (u)(b − a)
Capítulo 1. Integral definida e integral impropia
21
Yy
En la figura 1.1.15 se muestra la interpretación geométrica del
teorema 1 para el caso en que f ( x) ≥ 0 para todo x ∈ [a; b] . El
teorema establece que existe µ ∈ [a; b] tal que el área de la región
que está debajo de la curva y = f ( x) , entre a y b, es igual al área
de la región rectangular que tiene una base de longitud b − a y
una altura de longitud f (µ) .
y =y =f(x)
f (x)
µ )) .
ff ((µ
a
0
f (µ) .
b−a
b
Xx
Fig.
Fig.1.1.15
1.1.15
Ejercicios y problemas resueltos 1.1
1.
Divida el intervalo [1; 2] en n subintervalos de igual longitud, tome como µi el extremo derecho de cada subintervalo
[xi −1 ; xi ] y calcule la integral
2
∫ (2 − x ) dx
2
1
como el límite de una suma de Riemann.
Solución
Al dividir el intervalo [1; 2] en n partes iguales, la longitud
2 −1 1
=
n
n
Si se selecciona µi como el extremo derecho de cada subintervalo [xi −1 ; xi ] ,=
(i 1, 2 , … , n), resulta
x
de cada subintervalo es ∆=
µi = xi = 1 + i∆x = 1 +
i
, i = 1, 2, … , n.
n
Si f ( x)= 2 − x 2 , entonces
Nota: si C es una constante, se tiene
n
∑ C = nC
i =1
2
∫ (2 − x ) dx
=
I
2
1
n
i
lim ∑ 2 − 1 +
n→+∞ i 1
1=
n
n
=
µi ) ∆x
lim ∑ f (=
=
1 n 2i i 2
∑ 1 − − 2
n→+∞ n i =1
n n
n→+∞ i
=
=
2
1
n
lim
1n
2 n
1 n 2
∑1 − ∑ i − 2 ∑ i
n→+∞
n i 1 =
ni 1 =
=
n i1
lim
1
2 n (n + 1) 1 n (n + 1)(2n + 1)
n−
−
n→+∞ n
n 2 n2
6
=
lim
1
1
1 1 1
=lim − − 1 + 2 + =
−
n→+∞ n 6
n
n
3
22
Cálculo II
Por consiguiente,
2
1
−
∫ (2 − x ) dx =
3
2
1
2.
En la figura 1.1.16 se muestran las regiones D1 , D2 , D3 y D4
cuyas áreas son 3u2 , 2u2 , 4u2 y 1u2 respectivamente.
YY
f (x)
y y==f(x)
D2
0
D1
2
D4
4
2
8
4
8
D3
10
10
XX
Fig. 1.1.16
Utilice la interpretación geométrica de la integral definida
para calcular las siguientes integrales:
a)
∫
4
0
f ( x) dx
∫
b)
10
0
f ( x) dx
Solución
a) Al utilizar la propiedad aditiva con respecto al intervalo de
integración [0; 4] , se tiene
4
2
0
0
f ( x) dx
∫=
∫
f ( x) dx +
∫
4
2
f ( x) dx
Como la primera integral del segundo miembro de la
igualdad es numéricamente igual a – A ( D1 ) y la segunda
integral es igual a A ( D2 ) se obtiene
∫
4
0
∫
2
f ( x) dx =
f ( x) dx +
0
∫
4
2
f ( x) dx =
− A ( D1 ) + A ( D2 )
=−3 + 2 =−1
b) De manera similar, resulta
∫
10
0
f ( x) dx =
∫
4
0
f ( x) dx +
∫
8
4
f ( x) dx +
∫
10
8
f ( x) dx
=−1 − A ( D3 ) + A ( D4 ) =−1 − 4 + 1 =− 4
Capítulo 1. Integral definida e integral impropia
23
3.
Sean f y g funciones continuas en [0; 3] tales que
∫
3
0
f ( x) dx = 2 y
∫
3
0
g ( x) dx = −3
En cada caso, utilice las propiedades de la integral definida
para calcular
a)
3
∫ 0 [π f (x) − g (x)] dx
3
∫ [4 f (x) + 3g (x)] dx
b)
0
Solución
Al aplicar las propiedades de la integral definida de la suma y
de la multiplicación por un escalar, se tiene
a)
3
3
= π (2) − (−3) = 2π + 3
b)
3
∫ 0 [4 f (x) + 3g (x)] dx=
4
∫
3
0
3
∫ g (x) dx
f ( x) dx + 3
0
=
4 (2) + 3 (−3) =
−1
4.
3
π
∫ 0 [πf (x) − g (x)] dx =
∫ 0 f (x) dx − ∫ 0g (x) dx
Sea f ( x=
) 2x + 1 . Halle un número c en el intervalo [0; 2] que
verifique el teorema de valor medio para una integral definida.
Solución
A partir de la gráfica de la función f ( x=
) 2x + 1 (figura 1.1.17 ) y
la interpretación geométrica de la integral definida, se obtiene
∫
Y
∫
3
1
D
0
1
2
X
La interpretación geométrica de la
solución del ejercicio 4 establece
que el área de la región D es igual
al área de la región rectangular
de base el intervalo [0; 2] y altura
f (1) = 3.
Cálculo II
∫
2
0
(2x + 1) dx =
A ( D) = ATrapecio = 6
2
0
f ( x) dx = f (c)(2 − 0) ⇔ 6 =
(2c + 1)(2) ⇔ c =
1
Por lo tanto, el número c es igual a uno.
Fig. 1.1.17
24
0
f ( x) dx =
Luego, según el teorema de valor medio para integrales,
existe un número c en el intervalo [0; 2] tal que
f(x) = 2x + 1
5
2
5.
Use la propiedad 1g) para encontrar un intervalo de la forma
[c; d] en el que se encuentre la integral definida
∫
2
0
(2x + 1) dx
Solución
Para cualquier x en el intervalo [0; 2] , se cumple
0 ≤ x ≤ 2 ⇔ 1 ≤ 2x + 1 ≤ 5
Así, m = 1 y M = 5 son los valores mínimo y máximo
absolutos de f ( x) = 2 x + 1, x∈ [0; 2] . Luego, al aplicar la propie­
dad 1g), se obtiene
1(2 − 0) ≤
2
2
∫ 0 (2x + 1) dx ≤ 5 (2 − 0) ⇔ 2 ≤ ∫ 0 (2x + 1) dx ≤ 10
Luego, la integral definida dada se encuentra en el intervalo
[2; 10]. Una interpretación geométrica del resultado obtenido es
A ( D1 ) ≤ A ( D) ≤ A ( D2 ) .
YY
YY
55
11
00
𝐷𝐷𝐷𝐷1
22
XX
YY
f(x) = =
2x 2𝑥𝑥𝑥𝑥
+ 1+ 1
𝑓𝑓𝑓𝑓(𝑥𝑥𝑥𝑥)
11
00
𝐷𝐷𝐷𝐷
XX
Fig. 1.1.18
Ejercicios y problemas propuestos 1.1
55
00
𝐷𝐷𝐷𝐷2
X
X
22
Y
4
1.
Divida el intervalo [0; 3] en intervalos de
igual longitud, tome como ui el extremo
derecho de cada subintervalo [xi −1 ; xi ] y
calcule la integral definida
3
∫ (x
0
2
)
3.
y = f(x)
0
1
5
3
6
8
10
X
–2
− x + 2 dx
como el límite de una suma de Riemann.
2.
semicircunferencia
2
Seleccione como ui el extremo izquierdo de
cada subintervalo [xi −1 ; xi ] para calcular la
integral definida del ejercicio 1.
En la figura 1.1.19 se muestra la gráfica de
una función f.
Fig. 1.1.19
Utilice la interpretación geométrica de la
integral definida para calcular:
a)
c)
∫
∫
3
0
10
0
f ( x) dx
b)
f ( x) dx
d)
∫
∫
10
3
10
0
f ( x) dx
f ( x) dx
Capítulo 1. Integral definida e integral impropia
25
4.
Sean f y g funciones reales tales que
∫
2
0
∫
8.
a)
b)
5.
6.
7.
26
∫
0
∫
1
f ( x) − 5g ( x) dx
0 2
Cálculo II
2
2
∫ −1(x + 1) dx
b)
a)
∫
2
−1
x + 2 dx
−1
−1
utilice la interpretación geométrica y
las propiedades de la integral definida para
calcular:
2
En cada caso, use la propiedad 1g) para de­
terminar un intervalo de la forma [c; d] en el
que se encuentre el valor de la integral defi­
nida.
∫
4
Si h=
(x) f (x) + 2 e i=
( x) g ( x) + x
[3 f (x) + 2 g (x)] dx
Sea f ( x=
) 9 − x2 . Halle un número c en el
intervalo [0; 3] que verifique el teorema de
valor medio para una integral definida.
4
=
f ( x) dx 4=
y
g ( x) dx 7
0
Sea f ( x)= 2 − 3x. Halle un número c en el
intervalo [1; 3] que verifique el teorema de
valor medio para una integral definida.
a)
∫
f ( x) dx =
−3 y
g ( x) dx =
4
En cada caso, utilice las propiedades de
la integral definida para calcular
2
Sean f y g funciones reales tales que
2
9.
∫
4
−1
h ( x) dx
∫
b)
4
−1
i ( x) dx
Sean f y g funciones reales tales que
∫
1
∫
1
=
f ( x) dx 2=
,
g ( x) dx 5
Si
0
para
cada
f ( x) ≤ g ( x) , calcule
0
x ∈ [0; 1]
∫
1
0
se
cumple
f ( x) − g ( x) dx.
1.2Teoremas fundamentales del cálculo integral
Para calcular la integral definida de una función continua f en un
intervalo cerrado [a; b] se utilizan teoremas que relacionan las
operaciones de derivación e integración. Por su importancia, dos de
ellos se llaman teoremas fundamentales del cálculo integral.
Teorema 2. Primer teorema fundamental del cálculo integral
La función F es una antiderivada de
f en [a; b] , si para cada x ∈ [a; b] , se
cumple F ' ( x) = f ( x)
Si f es una función continua en un intervalo cerrado [a; b] y F es
cualquier función antiderivada de f en el intervalo [a; b] , entonces
∫
b
a
f ( x=
) dx F (b) − F (a)
Demostración
{x0 ; x1 ; x2 ; …;
=
Sea P
xn} una partición del intervalo [a; b] , donde
a= x0 < x1 < x2 < … < xn −1 < x=
b
n
Como la función F verifica el teorema del valor medio en cada
, i 1, 2 , … , n, entonces existe mi ∈ xi −1 ; xi
subintervalo [xi −1 ; xi ]=
tal que
F ' (mi=
)
F ( xi ) − F ( xi −1 ) F ( xi ) − F ( xi −1 )
=
,=
i 1, 2 , … , n
xi − xi −1
∆xi
Dado que F ' (mi ) = f (mi ) , (por ser F antiderivada de f ), se tiene
f (mi=
)
F ( xi ) − F ( xi −1 )
∆xi
Teorema del valor medio para
derivadas
Si F es una función continua en el
intervalo cerrado [a; b] y derivable
en a; b , entonces existe un número
u ∈ a; b tal que
F (b) − F (a)
F´(u) =
b−a
, =
i 1, 2 , … , n
de donde, F ( xi ) − F ( xi −1 ) = f (mi ) ∆xi
, i 1, 2 , … , n,
Así, al sumar las diferencias F ( xi ) − F ( xi −1 )=
resulta
n
=
S ∑ [F ( xi ) − F ( xi −1 )]
i =1
= F ( x1 ) − F ( x0 ) + F ( x2 ) − F ( x1 ) + … + F ( xn ) − F ( xn−1 )
=F ( xn ) − F ( x0 ) =F (b) − F (a) , es decir
n
F (b) − F (a)
∑ [F ( xi ) − F ( xi −1 )] =
i =1
Luego, al reemplazar F ( xi ) − F ( xi −1 ) por f (mi ) ∆xi se obtiene la
suma de Riemann en [a; b] , esto es
n
SR= ∑ f (mi ) ∆x=
F (b) − F (a)
i
i =1
Capítulo 1. Integral definida e integral impropia
27
Esta igualdad es válida para cualquier partición P del intervalo
cerrado [a; b] y
n
lim S=
lim ∑ f (mi ) ∆x=
F (b) − F (a)
R
i
P →0
P →0 i =1
Por lo tanto, por definición de integral definida, resulta
∫
b
a
n
f ( x) dx
= lim ∑ f (mi ) ∆x=
F (b) − F (a)
i
P →0 i =1
Observación 3
a) Una notación que se utiliza al calcular la integral definida de
una función f en [a; b] , es
∫
b
a
)]ba
[F (x=
f ( x=
) dx
F (b) − F (a)
donde la función F es cualquier antiderivada de f en [a; b] .
b) En el cálculo de la integral definida de una función f en [a; b]
no es necesario considerar la constante de integración k, pues
∫
b
a
[F (x) + k]=ba (F (b) + k) − (F (a) + k)
f ( x) dx
=
b
= F (b) − F (a) = [F ( x)]a
Ejemplo 5
Calcule cada una de las siguientes integrales definidas
a)
c)
e)
1
3
∫ 0 (x + 3x + 4) dx
π/ 4
b)
x
2
∫ 0 (e − sec x) dx
∫
2
0
d)
∫
∫
4
x3 − 4
1
π/ 2
0
x
dx
sen x
( 2 + cos x)3
dx
x − 1 dx
Solución
Dado que en cada caso la función integrando es continua en el
intervalo de integración, para calcular la integral definida se usa
el primer teorema fundamental. Así, se tiene
Una antiderivada de
f ( x) = x3 + 3x + 4 es
x 4 3x 2
F ( x) = +
+ 4x
4
2
28
Cálculo II
a)
1
∫(
0
1
x 4 3x 2
+ 4x
x + 3x + 4 dx = +
2
4
0
3
)
23
1 3
= + + 4 − (0 + 0 + 0) =
4
4 2
b)
∫
4
1
x3 − 4
=
dx
x
4
∫ (x
5/ 2
1
)
Una antiderivada de
f=
(x) x5/ 2 − 4x−1/ 2 es
− 4x −1/ 2 dx
4
7
1
2x 2
198
=
− 8x 2 =
7
7
1
c)
π/ 4
=
F ( x)
x
2
e x − tan x
0
∫ 0 (e − sec x) dx =
π/ 4
π
π
= e 4 − tan − e 0 − tan 0
4
(
∫
Una antiderivada de
f ( x=
) e x − sec 2 x es
F ( x=
) e x − tan x
= e π/ 4 − 2
d)
)
2 x7 / 2
− 8x1/ 2
7
sen x
π/ 2
dx =−
( 2 + cos x)3
0
∫
π/ 2
0
−3
2 + cos x) ⋅ (−sen x dx)
(
du
u−3
π
(2 + cos x)−2 2 1 1
5
= − =
=
2
8 18 72
0
Una antiderivada de
sen x
es
f ( x) =
(2 + cos x)3
F=
( x)
1
( 2 + cos x )−2
2
e) Para calcular la integral definida, se tiene en cuenta que
x − 1 , x ≥ 1
x −1 =
− x + 1 , x < 1
Luego, al aplicar la propiedad aditiva con respecto al
intervalo de integración [0; 2] , se tiene
∫
2
0
x − 1 dx =
=
1
2
∫
∫ x − 1 dx
∫ (−x + 1) dx + ∫ (x − 1) dx
0
x − 1 dx +
1
1
2
0
1
1
2
x2
x2
=
1
− + x + − x =
2
0 2
1
Ejemplo 6
Analice si la siguiente secuencia es correcta
∫
1
1
x −1
1 1
1
dx = x dx = =− =− − − =−2
−1 x 2
−1
1 −1
−1 −1 x −1
1
1
∫
1
−2
Solución
La secuencia no es correcta, pues la función integrando
f ( x) =
1
x2
tiene discontinuidad infinita en x = 0 ∈ [−1; 1] .
Capítulo 1. Integral definida e integral impropia
29
Por lo tanto, no es aplicable el primer teorema fundamental
que exige que la función integrando sea continua en el intervalo
de integración.
Teorema 3. Integración por partes para integrales definidas
Si f y g son funciones reales con derivadas continuas en el intervalo
cerrado [a; b] , entonces
∫
b
f (=
x) g ' ( x) dx
a
b
[ f (x) g (x)]ba − ∫ a f ′ (x) g (x) dx
Demostración
De la derivada del producto de funciones, se tiene
f ′ ( x) g ( x) + f ( x) g ′ ( x) ,
[ f (x) g (x)]' =
∀x ∈ [a; b]
de donde,
=
f ( x) g ′ ( x)
[ f (x) g (x)]' − f ′ (x) g (x) ,
∀x ∈ [a; b]
Luego,
∫
b
=
f ( x) g′ ( x) dx
a
=
b
b
'
∫ a [ f (x) g (x)] dx − ∫ a f ′ (x) g (x) dx
b
[ f (x) g (x)]ba − ∫ a f ′ (x) g (x) dx
Una forma simplificada de la fórmula de integración por partes
se obtiene al utilizar u = f ( x) y v = g ( x) , de donde du = f ′ ( x) dx y
dv = g′ ( x) dx. Así, se tiene
∫
b
b
f=
( x) g ’( x)dx f ( x) g( x) −
a
u
u
v a
dv
∫
b
g( x) f ’( x)dx
a
v
du
Ejemplo 7
Calcule cada una de las siguientes integrales defnidas:
a)
∫
π/ 4
0
x sec 2 x dx
b)
1
∫ (x + 1) ln (x + 1) dx
0
Solución
a) Sea I =
∫
π/ 4
0
2
x sec
x
dx
u
dv
Para integrar por partes se selecciona
u =x ⇒ du =dx
2
=
=
v tan x
dv sec x dx ⇒
30
Cálculo II
Luego, en la fórmula de integración por partes, se tiene
π/ 4
I = [x tan x]0
−
π
=
+ [ ln cosx
4
b) Sea I =
∫
π/ 4
0
tan x dx
2
2
π
4
+ ln
]0π/ 4 =
1
∫ 0 (x + 1) ln (x + 1) dx =
1
x + 1) ( x + 1) dx
∫ ln (
0
u
dv
Para integrar por partes se selecciona
dx
u = ln ( x + 1) ⇒ du = x + 1
(x + 1)2
dv =( x + 1) dx ⇒ v = 2
Luego, en la fórmula de integración por partes, se tiene
1
( x + 1)2
=
I
ln ( x + 1) −
2
0
1
= 2 ln 2 −
2
3
= 2 ln 2 −
4
1
∫
∫ (x + 1) dx =
0
1
(x + 1)2
0
2
dx
x +1
1
2 1
2 ln 2 − ( x + 1)
0
4
Teorema 4. Cambio de variable en una integral definida
gg
Sean y = f (u) una función continua en el intervalo cerrado [a; b]
y u = g ( x) una función que tiene derivada continua en [c; d] con
valores en [a; b] , tal que g (c) = a y g (d) = b, entonces
∫
d
c
f ( g ( x)) g ’ ( x) dx =
∫
b
a
f (u) du
cc
xx d
d a
a
x
ff
uu==gg(x)
(x)
( g ( x)) ==f f(u)
(u )
bb ff(g(x))
Fig. 1.2.1
Demostración
Si F es una antiderivada de f en el intervalo cerrado [a; b] , entonces
∫
b
a
f (u=
) du
)]ba
[F (u=
F (b) − F (a)
También la función F ( g ( x)) es una función antiderivada de
f ( g ( x)) g ’ ( x) pues
= F ′ ( g ( x)) g′ ( x)
[F ( g (x))]' =
f ( g ( x)) g′ ( x) , x ∈ [c ; d]
Capítulo 1. Integral definida e integral impropia
31
Luego, al aplicar el primer teorema fundamental del cálculo,
se obtiene
∫
d
c
(x))]dc
[F ( g=
′ ( x) dx
f ( g ( x)) g=
= F (b) − F (a) =
F ( g (d)) − F ( g (c))
b
∫ f (u) du
a
Por consiguiente,
∫
d
c
f ( g ( x)) g ' ( x) dx =
b
∫ f (u) du.
a
Ejemplo 8
Calcule cada una de las siguientes integrales definidas
a)
Para determinar los límites de
integración en la nueva variable
u se reemplazan los límites de la
variable original x en la relación
u = g ( x) y se obtienen los valores
de u correspondientes. En este caso
no es necesario regresar a la variable
original ya que la evaluación se hace
en la nueva variable u.
∫
3
0
2
x x + 16 dx
b)
∫
0
x x + 1 dx
−1
c)
∫
0
2
sec x
dx
1 + tan x
π/ 4
Solución
a) Sea I =
∫
3
0
x x 2 + 16 dx =
∫
3
0
x 2 + 16 x dx
Para calcular esta integral definida, un cambio de variable
adecuado es
u =x 2 + 16 ⇒
du =2x dx
du
o x dx =
2
Los límites de integración en la nueva variable u son:
Límite inferior: si x = 0, entonces u = 02 + 16 = 16
Límite superior: si x = 3, entonces u = 32 + 16 = 25
Luego, al aplicar el teorema de cambio de variable, resulta
I=
∫
3
0
x 2 + 16 x dx =
∫
25
16
u
du 1
=
2 2
∫
25
16
u1/ 2 du
25
1 2 3/ 2
61
u
= =
2 3
16 3
b)=
Sea I
∫
0
−1
x x + 1 dx
Para eliminar el radical se usa el cambio de variable
u=
x + 1 ⇒ u2 = x + 1 ⇒ x = u2 − 1 ⇒ dx = 2udu
Los límites de integración en la variable u son
Límite inferior: Si x = −1 , entonces u = 0
Límite superior: Si x = 0 , entonces u = 1
Luego, se tiene
32
Cálculo II
1
∫ 0(
)
1
∫ (u
I = u2 − 1 u.2udu =
2
4
0
)
− u2 du
1
u5 u3
4
=
2 − =
−
3 0
15
5
2
π/ 4
sec x
dx
=
(1 + tan x)−2 sec 2 x dx
0 1 + tan x
0
En este caso un cambio de variable adecuado es
∫
c) I
=
π/ 4
∫
u=
1 + tan x ⇒ du =
sec 2 x dx
Los límites de integración en la nueva variable u son
Límite inferior: Si x = 0, entonces u = 1
π
Límite superior: Si x = , entonces u = 2
4
Luego, se tiene
2
2
1
1
I =u−2 du =
− u =
1
1 2
∫
Yy
Propiedad 2. Integración de funciones pares o impares
Sean a > 0 y f una función continua en el intervalo cerrado [– a; a]
−–a
a
yy == f(x)
f (x)
0
aa
a) Si f es impar, entonces
∫
a
−a
f ( x) dx = 0 (figura 1.2.2)
f función
impar
f función impar
Fig. 1.2.1
Fig.
1.2.2
b) Si f es par, entonces
∫
a
−a
f ( x) dx = 2
∫
x
X
a
f ( x) dx (figura 1.2.3)
0
Yy
yy==f f(x)
(x)
Ejemplo 9
Calcule el valor de cada una de las siguientes integrales definidas
a)
∫ (
2
−2
3
x3 x 2 + 1 − x5 e x
2
−1
) dx
∫
b)
π/ 4
−π / 4
sen2 x dx
−–aa
0
a
x
X
f función
par
f función par
Fig. 1.2.3
Fig. 1.2.2
Solución
3
a) La función integrando f=
( x) x 3 x 2 + 1 − x 5 e x
2
−1
es continua
e impar en [−2; 2] , pues
33
f ( − x) = ( − x)
(− x)2 + 1 − (− x)5 e(− x)
=− x3 x 2 + 1 − x5 e x
3
2
−1
2
−1
=− f ( x)
Luego, al aplicar la propiedad 2 a), resulta
∫ (x
2
−2
33
x 2 + 1 − x5 e x
2
−1
) dx =0
Capítulo 1. Integral definida e integral impropia
33
b) Como la función integrando f ( x) = sen2 x es par y continua en
f es una función par, pues
f (− x=
)
=
(sen (− x))2
(−sen x)2
= sen
=
x f ( x)
2
π π
− 4 ; 4 , entonces se tiene que
π/ 4
π/ 4
sen x dx 2=
∫=
∫ sen x dx 2∫
2
−π / 4
2
0
π / 4 1 − cos
0
2
( 2 x)
dx
π
1
1
4 π 1
=
2 x − sen (2x) =
−
4
2
0 4 2
Teorema 5. Segundo teorema fundamental del cálculo integral
Si f es una función continua en el intervalo abierto I que contiene al
número a , entonces la función F definida por
=
F ( x)
∫
x
a
f (t ) dt , x ∈ I
es derivable en el intervalo I y se tiene
El segundo teorema fundamental
de cálculo integral establece que
para toda función continua f en
un intervalo, existe una función
antiderivada dada en términos de
una integral definida.
Así, por ejemplo, la función
f (t )
=
sent
, t ∈ 0; +∞
t
tiene una antiderivada que es
F ( x) =
pues
∫
x
1
sent
dt ,
t
sen x
F ′ ( x)
=
, x ∈ 0; +∞ .
x
=
F ′ ( x)
d
dx
x
∫
a
=
f (t ) dt f ( x) , x ∈ I
Demostración
Si G es una antiderivada de la función f en el intervalo I, esto es
G ’( x) = f ( x), entonces por el primer teorema fundamental se tiene
∫
x
x
F ( x) = f (t ) dt =
G ( x) − G (a) , x ∈ I
[G (t)]a =
a
Luego, al derivar ambos miembros con respecto a x, resulta
F ′ ( x) = G ′ ( x)
= f ( x) , x ∈ I .
Ejemplo 10
Dada la función
=
F ( x)
∫
x
π
(2t + cos (t)) dt
a) Determine F ( x) utilizando el primer teorema fundamental
del cálculo y luego halle su derivada.
b) Aplique el segundo teorema fundamental del cálculo para
obtener F ′ ( x) .
34
Cálculo II
Solución
∫
x
t 2 + sen (t )
a) F ( x) =
(2t + cos (t)) dt =
π
F ( x=
) x + sen (x) − π
2
x
π
2
Luego,
F ' ( x=
) 2x + cos (x) .
b) Al aplicar el segundo teorema fundamental del cálculo,
se tiene
d x
2 x + cos ( x) .
F ′ ( x) =
∫ (2t + cos (t )) dt =
dx π
Ejemplo 11
Halle las ecuaciones de las rectas tangente y normal a la gráfica
de la función
=
f ( x)
∫
20
x
−1
4 + et
4
−1
dt , x ∈
en el punto de abscisa x = −1.
Solución
=
f (−1)
Como
∫
20
=
dt 0 , entonces el punto de tangencia es
4
−1
4 + e t −1
−1
es P (−1; f (−1)) = P (−1; 0) .
Dado que la función g (t ) =
Nota
Si c está en el dominio de f, se tiene
∫
c
c
f ( x) dx = 0
20
es continua en , enton4
4 + e t −1
ces por el segundo teorema fundamental, se obtiene
=
f ′ ( x)
d x
20
20
=
dt
4
dx −1 4 + e t −1 4 + e x4 −1
∫
Luego, la pendiente de la recta tangente a la gráfica de f en el
punto de abscisa x = −1 es
m=
f ′ (=
1)
T
20
= 4
5
Por lo tanto, las ecuaciones de las rectas tangente y normal a
la gráfica de f en P (−1; 0) son
1
LT : y =
− ( x + 1)
4 ( x + 1) y LN : y =
4
Capítulo 1. Integral definida e integral impropia
35
Teorema 6. Generalización del segundo teorema fundamental
del cálculo integral
Sea F ( x) =
g ( x)
∫ ( ) f (t) dt, donde f es una función continua en el interhx
valo abierto I. Si las funciones g y h son derivables en el intervalo
abierto J con valores en el intervalo I, entonces
=
F ′ ( x) f ( g ( x)) g′ ( x) − f (h ( x)) h′ ( x) , x ∈ J
Demostración
Como G es una antiderivada de f
entonces
=
G′ (t ) f (t ) , t ∈ I
Si G es una antiderivada de la función f en el intervalo I, entonces,
por el primer teorema fundamental del cálculo integral, se tiene
g ( x)
∫ ( ) f (t) dt =[G (t)] ( ) =G (g (x)) − G (h (x)) , x ∈ J
g ( x)
hx
F ( x) =
hx
Luego, al aplicar la regla de la cadena, resulta
=
F ′ ( x) G′ ( g ( x)) .g′ ( x) − G′ (h ( x)) ⋅ h′ ( x)
=
f ( g ( x)) g′ ( x) − f (h ( x)) h′ ( x) , x ∈ J
Ejemplo 12
Dada la función
f ( x) =
∫
x2
t2
− x2 1 + t 4
dt
Calcule 2 f ” (−1) − 3 f ’ (−1)
Solución
Al aplicar el segundo teorema fundamental del cálculo se obtiene
f ′ ( x) =
x4
1 + x8
( )
x2 ’ −
x4
4 x5
2
x
’
−
=
1 + x8
1 + x8
( )
Luego, por la regla de la derivada del cociente, se tiene
f ′′ ( x) =
(
4 5x 4 − 3x12
(1 + x8 )
)
2
Al evaluar las derivadas de 1er y 2do orden en x = −1, resulta
f ′ (−1) =−2 y f ′′ (−1) =
2
Por lo tanto,
2 f ′′ (−1) − 3 f ′ (−1) =
10.
36
Cálculo II
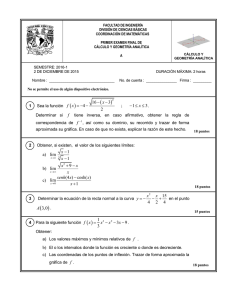
Definición 3. Funciones seccionalmente continuas
Una función real f es seccionalmente continua en [a; b] si existen
puntos de discontinuidad c1 , c2 , … , cn−1 que dividen al in­tervalo [a; b] en subintervalos de la forma ci −1 ; ci , para
=
i 1, 2 , … , n, tales que
a) a= c0 < c1 < c2 < … < cn−1 < cn= b
b) f es continua en cada subintervalo abierto ci −1 ; ci
c) En cada punto de discontinuidad existen los límites laterales
lim f ( x) y
x →ci−
lim f ( x) , i= 1, 2 , … , n − 1
x →ci+
En c0 = a, solo existe lim f ( x) y en el extremo derecho cn = b,
x → a+
solo existe lim f ( x) .
x →b−
La figura 1.2.4 muestra la gráfica de una función seccionalmente
continua
Y
a = c0
c1
0
c2
c3
c4
c5 = b
X
Fig. 1.2.4
Ejemplo 13
Dada la función f definida por
x + 2 , −4 ≤ x < 0
f ( x) = 1 − x 2 ,
0 ≤ x <1
1≤ x ≤ 4
x,
Grafique f y determine si es seccionalmente continua en [− 4; 4] .
Solución
Y
La gráfica de la función f se muestra en la figura 1.2.5
La función f es seccionalmente continua en [− 4; 4] , pues
y = f(x)
2
i) f es continua en los subintervalos abiertos − 4; 0 , 0; 1 , 1; 4 .
ii) Los límites laterales en x =
− 4, x =
0, x =
1 y x = 4 existen,
esto es
=
lim f ( x) 2 , =
lim f ( x) 2 ,=
lim f ( x) 1=
, lim f ( x) 0 ,
x →−4+
x → 0−
x → 0+
x →1−
1
–4
–2
0
1
4 X
Fig. 1.2.5
=
lim f ( x) 1=
, lim f ( x) 4
x →1+
x → 4−
Capítulo 1. Integral definida e integral impropia
37
Yy
LL2 2
a
bb
=
L1 lim
=
f ( x) y L2 lim f ( x) existen.
Xx
x → a+
x →b−
La integral definida de la función f desde a hasta b, es
Yy
a
a
Sea f una función continua en el intervalo cerrado [a; b] , excepto
quizás en los extremos del intervalo x = a o x = b , tal que
LL11
0
LL2 2
Definición 4. Integral definida de una función con
discontinuidad finita en los extremos de integración
yy == ff(x)
(x)
g (x)
yy = g(x)
∫
LL11
0
bb
Xx
g es una función continua en [a; b]
b
a
f ( x) dx =
b
∫ g (x) dx, donde
a
f ( x) , a < x < b
=
g ( x) =
L1 ,
x a
L ,
x=b
2
La figura 1.2.6 muestra las gráficas de las funciones f y g.
Fig. 1.2.6
Teorema 7
Sea f una función continua en [a; b] , excepto quizás en los
extremos del intervalo x = a o x = b, en los que los límites laterales
lim f ( x) y lim f ( x) existen. Si F es una función antiderivada de
x → a+
x →b−
f en el intervalo a; b , entonces
b
) dx
∫ f (x=
F (b) − F (a)
a
Cálculo de la integral de una función seccionalmente continua
Si f es una función seccionalmente continua en [a; b] , con puntos de
discontinuidad finita en c1 , c2 , … , cn−1 , entonces la integral definida
de f en [a; b] es dada por
b
c1
a
a
f ( x) dx
∫=
∫
f ( x) dx +
∫
c2
c1
f ( x) dx + … +
Ejemplo 14
Dada la función f definida por
− x + 1 , −3 ≤ x < 1
=
f ( x) x 2 ,
1≤ x < 3
3≤ x≤5
1,
a) Trace la gráfica de f
b) Calcule
38
Cálculo II
∫
5
−3
f ( x) dx
∫
b
cn −1
f ( x) dx
Solución
Y
9
a) La gráfica de f se muestra en la figura 1.2.7
b) La función f es seccionalmente continua en [−3; 5] . Luego, su
integral definida es
∫
∫
I=
=
5
3
−1
−3
∫
1
−3
− x + 1 dx +
∫
3
5
1
3
∫ 1dx
(x + 1) dx + ∫ − (x + 1) dx + ∫ x dx + ∫ 1dx
f ( x) dx=
x 2 dx +
1
3
−1
1
−1
1
5
2
3
–1
1
0
1
3
5
X
3
x2
x2
x3
5
= + x − + x + + [ x]3
2
−3 2
−1 3 1
=−2 + (−2) +
–3
–2
Fig. 1.2.7
26
20
+2=
3
3
Ejercicios y problemas resueltos 1.2
1.
Calcule cada una de las siguientes integrales definidas:
a)
c)
e)
g)
∫
π
4
0
∫
0
∫
2
∫
1
−1
0
b)
sec x dx
2
x + 2x + 2
dx
d)
9x 2 + 4x − 13
dx
(x + 1)(x + 2)(x − 3)
f)
x3 − 2x 2 − x + 2 dx
h)
2
−1
∫
∫
∫
∫
π
2
cos4 x
π
4
sen6 x
3
1
π
0
π
2
0
1
x
3
dx
1+
1
x2
dx
1 − sen2 x dx
sen4 x dx
Solución
a) Una antiderivada de la función f ( x) = sec x en el intervalo
π
F ( x) ln sec x + tan x . Luego,
0; 4 es=
∫
π
π
0
0
I = 4 sec x dx =[ln sec x + tan x ] 4 =ln
(
)
2 +1
Capítulo 1. Integral definida e integral impropia
39
π
2
cos4 x
dx
=
π
sen6 x
∫
b) I
=
4
π
4
=
− π2 cot x
4
u4
∫
(
)
∫
π
2
cos4 x 1
=
dx
π
sen4 x sen2 x
∫
4
π
2
π
4
cot 4 x csc 2 x dx
π
(cot x)5 2 1
=
−csc 2 x dx =
−
5 π 5
du
(
)
4
c) Al completar cuadrados en el denominador del integrando,
se obtiene
du
1
u
arctan + C
=
2
2
a
a
u +a
∫
=
I
∫
1
=
dx
−1 x + 1 2 + 1
du
()
0
[arctan (x + 1)] 0−1
u2
= arctan (1) − arctan (0) =
∫
un+1
+C
n +1
12
3 1
1
1 3
1
d) I =3 1 + 2 dx =
−
1+ 2
1 x
2 1
x
x
u
∫
un=
du
π
4
∫
3
2
− 3 dx
x
du
3
3
3
1 2
1 2
1
1 2
18 2 − 8 3
−
− 1 + 2
=
=
1 + 2 =
2 3 x 1
3 x 1
27
e) I =
∫
2
0
9x 2 + 4x − 13
dx
(x + 1)(x + 2)(x − 3)
Al descomponer el integrando de I en una suma de
fracciones parciales, se tiene
9x 2 + 4x − 13
A
B
C
=
+
+
(x + 1)(x + 2)(x − 3) x + 1 x + 2 x − 3
De donde
9 x 2 + 4 x − 13= A ( x + 2)( x − 3) + B ( x + 1)( x − 3) + C ( x + 1)( x + 2)
Dado que la igualdad de polinomios es válida para todo
x ∈ , se tiene
para x =−1 : −8 =−4 A ⇒ A =2
−2 :
para x =
15 =
5B ⇒ B =
3
para x= 3 :
80= 20C ⇒ C= 4
Luego,
I
=
=
∫
3
4
2
+
+
dx
0 x +1 x + 2
x − 3
2
[ 2 ln x + 1 + 3 ln x + 2
8
= 3 ln2 − 2 ln3 = ln
9
40
Cálculo II
+ 4 ln x − 3
]02
1 y la
f) Al utilizar la identidad trigonométrica sen2 x + cos2 x =
propiedad del valor absoluto
π
∫
∫
2
I=
x 2 = x , resulta
π
∫
2
y = cos x
π
1
1 − sen x dx = cos x dx = cos x dx
0
0
0
Como la función f ( x) = cos x es mayor o igual que cero
en 0; π , y menor o igual que cero en π ; π , se tiene
2
2
∫
=
I
=
∫
∫
g) Sea
=
I
π
2
∫
cos x dx +
0
π
2
cos x dx −
0
2
−1
∫
π
π
π
2
Y
π
2
π
0
π
2
0
–1
π ; π,
2
π ; π,
2 X
Fig. 1.2.8
∫ cos x dx + ∫ (−cos x) dx
cos x=
dx
π
2
0
π
cos x dx = [sen x] − [sen x] π = 2
π
2
2
x3 − 2x 2 − x + 2 dx
Para expresar la función integrando sin el valor absoluto,
primero se factoriza el polinomio que se encuentra dentro
de las barras, esto es
P ( x) = x − 2x − x + 2 = ( x − 1)( x + 1)( x − 2)
3
2
Las soluciones de la ecuación P ( x) = 0 son x = −1, x = 1
y x = 2. Así, el diagrama de signos del polinomio P ( x) en
la recta real es
Signos de P(x):
–
–
+
–1
1
La factorización se obtiene al aplicar
el método de Ruffini al polinomio
P ( x) = x 3 − 2 x 2 − x + 2
+
2
Luego, al utilizar la definición de valor absoluto, el inte­
grando se escribe como
(
)
− x3 − 2x 2 − x + 2 ,
x3 − 2x 2 − x + 2,
x3 − 2 x 2 − x + 2 =
3
2
− x − 2x − x + 2 ,
x3 − 2x 2 − x + 2 ,
(
)
x < −1
−1 ≤ x < 1
1≤ x < 2
x≥2
Por consiguiente, al aplicar la propiedad aditiva con res­
pecto al intervalo de integración, resulta
=
I
1
∫ (x
−1
3
)
− 2x 2 − x + 2 dx +
1
2
∫ − (x
1
3
)
− 2x 2 − x + 2 dx
2
x4 2
x4 2
x2
x2
37
= − x3 −
+ 2 x − − x3 −
+ 2 x =
4 3
−1 4 3
1 12
2
2
Capítulo 1. Integral definida e integral impropia
41
h) Al usar la identidad trigonométrica sen2 x =
se tiene
cos2 (2x) =
1 + cos (4x)
=
I
2
π
2 sen4 x dx
=
∫
1
=
4
1
=
4
∫
0
∫
∫
π
2
0
π
1 − cos
2
0
1 − cos (2x)
2
,
( 2 x) 2
dx
2
1 − 2 cos (2 x) + cos2 (2 x) dx
π
2 1 − 2cos
0
1 + cos (4x)
dx
2
( 2 x) +
π
sen (4 x) 2 3π
1 3
= x − sen (2x) +
=
4 2
8 0 16
2.
Calcule cada una de las siguientes integrales definidas
a)
c)
π
2
∫
(2x − 1) cos x dx
0
∫
1
xe x
0
(x + 1)
b)
dx
2
d)
∫
∫
1
0
(
)
x 2 ln x 2 + 1 dx
3
arctan x
1
x3
dx
Solución
∫
a) Sea
=
I
∫
b
=
udv
a
b
[uv]ba − ∫ avdu
π
2
0
2 x − 1) cos x dx
(
dv
u
u = 2x − 1 ⇒ du = 2dx
=
⇒ v sen x
dv cos x dx =
Al reemplazar en la fórmula de integración por partes, se
tiene
π
2
0
I=
[(2x − 1) sen x] −
= π −1− 2
b) Sea I =
∫
1
0
∫
π
2
0
∫
π
2
0
2 sen x dx
π
sen x dx = π − 1 + 2 [cos x] 2 = π − 3
0
2
( x +
1) x
ln
dx
2
u
dv
2x
u ln x 2 + 1 ⇒ du
dx
= 2
=
x +1
x3
dv x 2 dx =
=
⇒
v
3
(
42
Cálculo II
)
Al utilizar la fórmula de integración por partes, resulta
1
x3
=
I ln x 2 + 1 −
3
0
(
)
ln2 2
=
−
3 3
∫
∫
1 x3
ln2 2
−
dx=
2
3 3
x +1
0
∫
1
=
1
x − 1 + 2 dx =
0
x +1
2
1
1 xe x
=
dx
0 x +1 2
( )
∫
∫
1
1
x
xe
0
u
2
x4 − 1 + 1
x2 + 1
x4 − 1
2
x +1
(x
2
1
+
2
)(
x +1
)+
+ 1 x2 − 1
2
x +1
1
= x2 − 1 + 2
x +1
ln2 4 π
ln2 2 x3
=
− − x + arctan x =
+ −
3 3 3
3 9 6
0
c) Sea I
=
=
x +1
2x
dx
0 3 x2 + 1
x4
1
x4
2
1
x2 + 1
Por lo tanto,
dx
x4
(x + 1)
2
x +1
= x2 − 1 +
1
2
x +1
dv
u =xe x
⇒ du =( x + 1) e x dx
1
dv = 1 dx ⇒ v =
−
2
x +1
(x + 1)
Al reemplazar en la fórmula de integración por partes,
resulta
1
xe x
I=
−
−
x + 1 0
e
=− +
2
=
d) I
∫
∫
1
0
1
x
−
( x + 1) e dx
+
x
1
1
e
e
e x dx =− + e x = − 1
0
0
2
2
1
3 arctan x
dx
=
1
x3
∫
∫
1
arctan x 3 dx
x
u
3
1
dv
1
du
dx
=
=
u arctan x ⇒
2
x +1
1
1
dv =
dx ⇒ v =
− 2
3
2x
x
Por la fórmula de integración por partes, se tiene
3
1
I arctan x − 2 −
=
2x 1
3
1 arctan x
1
=
−
+
2
2 x
2
1
∫
∫
1 1
dx
− 2 2
2x x + 1
3
1
3
1
2
(
(
)
)
x x2 + 1
3
5π 1
1
=
+
dx
2
72 2 1 x x 2 + 1
∫
1
dx
. .. (∗)
j
Sea J =
∫
3
1
2
(
1
)
x x2 + 1
dx
Capítulo 1. Integral definida e integral impropia
43
Al descomponer el integrando de J en una suma de fracciones parciales se tiene
2
(
1
)
2
x x +1
de donde
=
(
A B Cx + D
+
+ 2
x x2
x +1
) (
)
=
1 Ax x 2 + 1 + B x 2 + 1 + (Cx + D) x 2
Dado que la igualdad de polinomios es válida para todo
x ∈ , se tiene
Para=
x 0:
=
1 B
⇒=
B 1
Coeficiente de
x3:
0= A + C
Coeficiente de
x2:
0=
B+D ⇒ D =
−1
0 A
Coeficiente de x: =
⇒ =
A 0 y =
C 0.
Luego, al reemplazar los valores de estas constantes en
la integral J, resulta
∫
J=
3
1
1
2
x
−
3
1
1
π
1
−
dx =− − arctan x =1 −
2
x
12
3
1
x + 1
Por lo tanto, al reemplazar el valor de J en (*), se obtiene
I=
3.
5π 1
1
π 18 − 6 3 + π
+ 1 −
− =
72 2
12
36
3
Calcule cada una de las siguientes integrales
a)
c)
∫
∫
ex
ln3
0
e
2x
π
+1
2
0
x
− 2e + 5
2
cos
(
dx
b)
)
d)
x − 1 dx
∫
∫
2
2
0
0
x 2 arcsen x dx
π
2 x3 cos
(x2 ) dx
Solución
a) Sea I =
∫
ex
ln3
0
e 2 x − 2e x + 5
dx
Al completar cuadrados en el denominador del integrando,
se obtiene
I=
ex
ln3
∫ (e − 1)
0
x
2
+4
dx
z e x − 1 , se tiene
Al hacer el cambio de variable =
ln 3
e ( ) =3
44
Cálculo II
z =e x − 1
=
x 0
=
x ln3
⇒ dz =e x dx
⇒=
z 0
⇒=
z 2
Luego, la integral I en la variable z es
I
=
b) Sea I
=
∫
2
0
2
1
1 π π
z
dz
=
=
arctan =
2
2
2
0 2 4 8
z +4
1
2
2
=
x 2 arcsen x dx
∫
∫
0
2
2
0
arcsen
x 2 dx)
x (
u
dv
1
=
du
dx
u arcsen x ⇒ =
1 − x2
x3
2
=
dv
x
dx
⇒
=
v
3
Al reemplazar en la fórmula de integración por partes,
se tiene
2
x3
1
=
I arcsen x 2 −
3
0
3
=
2π 1
−
48 3
2
2
∫
x2
2
2
0
x3
1 − x2
(x dx)
∫1 −
x
2
0
dx
... (*)
j
Para calcular el valor de J, se hace el cambio de variable
z=
1 − x2 ⇒ z2 =
1 − x 2 ⇒ x dx =
− z dz
x 0
=
=
⇒ z 1
2
2
=
=
⇒z
x
2
2
Luego, al reemplazar j en (*) se tiene
2
2 1−
z2
(− z dz) =
z
I=
2π 1
−
48
3
=
I
2π 1 z 3
− z − =
48 3
3 2
∫
1
1
2
c) Sea I
=
∫
π
+1
2
0
2
cos
(
2π 1
−
48
3
1
∫ (1 − z ) dz
2
2
2
2π 2 5 2
− +
48
9 36
)
x − 1 dx
z
Al hacer el cambio de variable=
x − 1 , se tiene
2
z = x − 1
⇒ x = ( z + 1) ⇒ dx = 2 ( z + 1) dz
x =
⇒ z=
−1
0
2
π
π
z=
x =
+ 1 ⇒
2
2
Capítulo 1. Integral definida e integral impropia
45
Luego
=
I
π
2
∫
−1
∫
cos z.2 ( z + 1) dz
=
π
2
−1
2 ( z + 1) cos z dz
Para calcular esta integral se requiere el método de inte­
gración por partes. Así, se tiene
=
I
π
2
∫
−1
2 ( z + 1) cos z dz
dv
u
u =2 ( z + 1) ⇒ du =2 dz
=
v sen z
dv cos z dz ⇒=
Por la fórmula de integración por partes, resulta
π
∫
I =+
[2 (z 1) sen z] 2 −
−1
π
2
−1
2 sen z dz
π
π
= 2 + 1 + 2 [cos z] 2 = π + 2 − 2 cos1
−1
2
d) Sea I =
∫
π
2
0
( )
x3 cos x 2 dx
Al hacer el cambio de variable z = x 2 , se tiene
dz
2
=
⇒ x dx
z x=
2
x 0
z 0
⇒=
=
π
x = π ⇒ z =
2
2
Luego
=
I
∫
π
( )
2 x3 cos x 2 dx
=
0
1
2
∫
π
2
0
z cos z dz
u
dv
=
⇒
=
du dz
u z
=
⇒ v sen z
dv cosz dz =
Al reemplazar en la fórmula de integración por partes,
resulta
π
1
I=
[z sen z]02 −
2
=
46
Cálculo II
∫
π
2
0
1π π−2
− 1=
22
4
π
1 π
sen z dz =
+ [cos z]02
2 2
4.
Calcule cada una de las siguientes integrales definidas:
a)
c)
∫
∫
5π
6
π
6
sen (3x) cos (3x) dx
4
1
3
0
2
3x 2
b)
dx
4 − 9x2
d)
∫
∫
π
3
sec 6 x
dx
π tan x
4
2
2 x3
0
x2 + 4
dx
Solución
a) Sea I =
I=
=
=
5π
6
∫
π
6
∫
5π
6
π
6
π
6
∫
1
8
1
=
8
sen2 (3x) sen2 (3x) cos2 (3x) dx
5π
6 1 − cos
∫
1
=
8
sen4 (3x) cos2 (3x) dx
∫
∫
1
I=
16
2
5π
6
π
6
5π
6
π
6
5π
6
π
6
∫
(6x) 1 − cos (6x) 1 + cos (6x)
2
2
dx
sen2 A =
1 − cos2 (6x) [1 − cos (6x)] dx
cos2 A =
1 − cos (2 A)
2
1 + cos (2 A)
2
sen2 (6 x) [1 − cos (6x)] dx
1
sen (6x) dx −
8
5π
6
π
6
2
∫
5π
6
π
6
sen2 (6 x) cos (6 x) dx
1
[1 − cos (12x)] dx −
48
∫
2
5π
6
π
6
sen (6 x) 6cos (6 x) dx
u
du
5π
5π
sen (12x) 6
1
1
π
sen3 (6x) 6 =
x−
=
−
π
16
12 π 144
24
6
6
b) Sea I =
∫
π
3
π
4
sec 6 x
dx
tan x
sec 2 x ,
Al utilizar la identidad trigonométrica 1 + tan2 x =
se tiene
=
I
π
3
sec 4 x
=
sec 2 x dx
π tan x
∫
4
(
)
∫
π
3
π
4
(1 + tan2 x)
tan x
2
(sec2 x dx)
Capítulo 1. Integral definida e integral impropia
47
Al hacer el cambio de variable u = tan x, resulta
tan x ⇒ du= sec 2 x dx
u=
=
x
=
x
π
4
π
3
⇒ =
u 1
⇒ =
u
3
Luego
3
∫
I
=
1
(1 + u2 )
2
u
∫
du
=
31
1
3
u4
= ln u + u2 + = ln
4 1
c) Sea I =
1
3
∫
0
3x 2
4 − 9x2
3
+ 2u + u du
u
( 3) + 4
dx
2
sen θ, se tiene
3
Al hacer la sustitución trigonométrica
=
x
2
2
sen θ ⇒ dx
cos θ dθ
=
3
3
0
=
⇒θ 0
x
=
=
x
x
=
1
3
=
⇒θ
π
6
Luego
∫
I
=
2
=
9
d) Sea I =
0
∫
∫
3x 2
dx
=
0 4 − 9x2
π
6
∫
=
I
1
3
∫
π
6
0
4
3 sen2 θ
9
2 cos θ d θ
4
3
4 − 9 sen2 θ
9
8 sen2 θ cosθ
4
=
dθ
9
9 4 − 4 sen2 θ
∫
π
6
0
sen2 θ dθ
π
π
6
2 sen (2θ) 6 2π − 3 3
=
[1 − cos (2θ)] dθ= θ −
9
2 0
54
0
2
2 x3
dx
x2 + 4
=
x 2 tan θ, resulta
Al hacer la sustitución trigonométrica
0
=
x 2 tan θ ⇒ dx
= 2 sec 2 θ dθ
x 0
=
=
⇒ θ 0
π
=
=
⇒ θ
x 2
4
48
Cálculo II
Luego
∫
=
I
2 x3
=
dx
0
x2 + 4
2
= 16
∫
π
4
0
∫
π
4
0
(
)
2 8 tan3θ
2
4 tan θ + 4
3
tan θ =
sec θ dθ 16
π
4
(2 sec2θ dθ)
∫ (sec θ − 1) (sec θ tanθ dθ)
2
0
π
sec3θ
4 16
= 16
− sec θ =
2− 2
3
3
0
(
5.
)
Utilice el cambio de variable z = π − x para mostrar que
∫
π
0
(2x − π)
1 + sen x dx =0
(2x − π)
1 + sen x dx
Solución
Sea
=
I
∫
π
0
Al hacer el cambio de variable z = π − x, se tiene
x = π − z ⇒ dx = −dz
⇒ z =π
0
x =
⇒z=
0
x =π
Luego
∫
=
I
0
π
[2 (π − z) − π]
1 + sen (π − z) (−dz)
π
π
0
0
=
− ∫ ( 2 z − π ) 1 + sen zdz =
−I
∫ (π − 2 z ) 1 + sen zdz =
Es decir I = − I , de donde I = 0. Por lo tanto,
∫
6.
π
0
(2x − π)
1 + sen x dx =0
Sean a , b ∈ tales que 0 < a < b.. Si f es una función impar y
continua en el intervalo [−b; b] , demuestre que
∫
−a
−b
f ( x) dx = −
b
∫ f (x) dx
a
Solución
En el siguiente gráfico (fig. 1.2.8) se muestran ordenados los
números –b, –a, 0, a y b en la recta real.
Capítulo 1. Integral definida e integral impropia
49
–b
0
–a
a
b
Fig. 1.2.8
Dado que f es una función impar y continua en
se tiene
[– a; a] ⊂ [−b; b] ,
∫
b
∫
a
=
f ( x) dx 0=
y
f ( x) dx 0
−b
−a
Luego, por la propiedad aditiva de la integral con respecto
al intervalo de integración, se tiene
b
(x) dx = ∫
∫f
−b
−a
−b
f ( x) dx +
0
a
b
(x) dx + ∫ f (x) dx
∫ f
−a
a
0
Por consiguiente
∫
7.
−a
−b
f ( x) dx = −
b
∫ f (x) dx
a
Sean a , b ∈ tales que 0 < a < b. Si f es una función par y conti­
nua en el intervalo [−b; b] , demuestre que
∫
−a
−b
f ( x) dx =
∫
b
a
f ( x) dx
Solución
Los números –b, –a, 0, a y b se muestran ordenados en la
figura 1.2.9.
0
–a
–b
a
b
Fig. 1.2.9
Como f es una función par y continua en [– a; a] ⊂ [−b; b] ,
se tiene
∫
b
∫
b
∫
a
=
f ( x) dx 2=
f ( x) dx y
f ( x) dx 2
−b
−a
0
∫
a
0
f ( x) dx
Al aplicar la propiedad aditiva de la integral con respecto al
intervalo de integración en la igualdad
∫
b
−b
50
Cálculo II
f ( x) dx = 2
∫
b
0
f ( x) dx
resulta
∫
−a
−b
f ( x) dx +
∫
a
f ( x) dx +
−a
∫
b
f ( x) dx
= 2
a
∫
a
0
f ( x) dx +
b
∫ f (x) dx
a
De donde
∫
−a
−b
f ( x) dx + 2
∫
a
0
∫
f ( x) dx +
b
a
f ( x) dx = 2
∫
a
0
f ( x) dx + 2
∫
b
a
f ( x) dx
Por lo tanto,
∫
8.
−a
−b
f ( x) dx =
∫
b
a
f ( x) dx
Sea f una función impar y continua en [−3; 3] tal que
∫
2
∫
−2
=
f ( x) dx 4=
y
f ( x) dx 2
1
Calcule
∫
3
−1
−3
f ( x) dx
Solución
Al aplicar la propiedad aditiva de la integral con respecto al
intervalo se tiene
∫
3
−1
f ( x) dx =
∫
1
f ( x) dx +
−1
∫
2
1
f ( x) dx +
∫
3
2
f ( x) dx
(∗)
Como f es impar, entonces
∫
1
−1
∫
3
∫
−2
f ( x) dx =
0 y
f ( x) dx =
−
f ( x) dx =
−2
2
−3
Al reemplazar estos resultados en (*), se obtiene
∫
3
−1
9.
En el ejercicio resuelto 6 se mos­
tró que si f es impar y continua
en [−b; b] , entonces
∫
−a
−b
f ( x) dx = −
b
∫ f (x) dx
a
f ( x) dx = 0 + 4 + (−2) = 2
Sea H una función continua en . Si para todo x ∈ se cumple
∫
x
0
H (t ) dt =
∫
4x
1
e sen t dt
π
calcule H ' .
4
Solución
Al aplicar el segundo teorema fundamental en ambos miem­
bros de la igualdad dada, se obtiene
H ( x) = e
sen (4 x)
(4)
Capítulo 1. Integral definida e integral impropia
51
Luego
H ′ ( x) = 16e
sen (4 x)
cos (4x)
Finalmente,
π
H ′ =16e sen π cos (π) =−16
4
10. Sea f la función definida por
=
f ( x)
∫
dt
x
4
t − 2t 2 + 4
0
, x∈
Determine los intervalos en los que la gráfica de f es cóncava
hacia arriba o cóncava hacia abajo.
Solución
Los intervalos en los que la gráfica de f es cóncava hacia arriba
o cóncava hacia abajo se determinan mediante la segunda de­
rivada f ”.( x)
Así, la primera derivada de f se obtiene al utilizar el segun­
do teorema fundamental del cálculo, esto es
f ’ ( x) =
1
4
x − 2x2 + 4
de donde, la segunda derivada de f es
4 x ( x + 1)( x − 1)
4 x3 − 4 x
f ” ( x) =
−
=
−
2
2
x 4 − 2 x 2 + 4
x 4 − 2 x 2 + 4
Al resolver la ecuación
4x ( x + 1)( x − 1)
0
f ” ( x) =
−
=
2
x 4 − 2x 2 + 4
−1, x =
0, x =
1.
se obtienen los números críticos de inflexión x =
El diagrama de signos de f ” ( x) es
+
+
−
−–11
00
−
11
Fig. 1.2.10
Por lo tanto, la gráfica de f es cóncava hacia arriba en −∞; −1
y 0; 1 , cóncava hacia abajo en −1; 0 y 1; +∞ .
52
Cálculo II
∫
11.=
Si F ( x)
B( x) + x3
x
3 + t 2 dt , donde
=
B ( x)
2
∫
x
−1
( )
sen πt 3 dt ,
calcule el valor de F ′ (1) .
Solución
Al utilizar la generalización del segundo teorema fundamental
del cálculo en
=
F ( x)
∫
B( x) + x3
x
3 + t 2 dt
2
se obtiene
2
F ′ ( x) = 3 + B ( x) + x3 B ' ( x) + 3x 2 − 3 + x 4 (2 x)
Luego, al evaluar en x = 1, se tiene
2
3 + [B (1) + 1] ( B′ (1) + 3) − 4
F ′ (1) =
(*)
Como
=
B ( x)
∫
x
( )
sen πt 3 dt
−1
( )
3
∫−1 sen (πt ) dt=
y f=
(t) sen πt3 es una función impar y continua, se sigue que
a) B (1)=
1
0
b) Al utilizar el segundo teorema fundamental del cálculo, se
obtiene
( )
B′ =
(x) sen πx3
y B′ (1=
) sen (π=) 0
Por lo tanto, al reemplazar B (1) = 0 y B’ (1) = 0 en (*), resulta
F ′ (1) =
2
3 + [0 + 1] (0 + 3) − 4 = 2
12. En la figura 1.2.9 se muestra la gráfica de una función g y
la recta LT que es tangente a la curva en el punto A (2; 3) .
Además, la recta LT pasa por el punto B (8; 7) .
Si
=
f ( x)
∫
g ( x)
1
t + 7 dt , halle f ′ (2) .
2
Solución
2
[g (x)]
+ 7 [g′ ( x)]
LT
7
3
Para hallar f ′ ( x) se utiliza la generalización del segundo teo­
rema fundamental del cálculo, esto es
=
f ′ ( x)
Yy
0
B
A
2
8
x
X
Fig.
1.2.6
Fig.
1.2.9
Capítulo 1. Integral definida e integral impropia
53
De donde
[g (2)]2 + 7 [g′ (2)]……….. (∗)
=
f ′ (2)
Como la recta tangente LT pasa por los puntos A (2; 3)
y B (8; 7) , su pendiente es
7−3 2
= g′ (2)
=
8−2 3
mT
=
Por consiguiente, al reemplazar g (2) = 3 y g’ (2) = 2 / 3 en
(*), se obtiene
2
2 8
f ′ (2) = [3] + 7 . =
3 3
13. Dada la función
2x + 1 , − 2 ≤ x < 0
f ( x) = 2
x − 1 , 0 ≤ x ≤ 2
a) Trace la gráfica de f y verifique que es seccionalmente con­
tinua en el intervalo [−2; 2] .
b) Calcule
∫
2
−2
f ( x) dx .
Solución
a) La gráfica de f se muestra en la figura 1.2.10
Yy
En la gráfica se observa que la función f es seccionalmen­
te continua en el intervalo [−2; 2] , pues solo tiene
3
discontinuidad esencial finita en x = 0 , y
lim f ( x) =
−3 y lim f ( x) =
3
1
x →−2+
-2
2
0
-1
-3
Fig.Fig.
1.2.7
1.2.10
x
X
x → 2−
b) Como f es seccionalmente continua en el intervalo [−2; 2] ,
se tiene
∫
2
∫
=
f ( x) dx
−2
0
−2
=
0
54
Cálculo II
∫
2
0
f ( x) dx
2
2
∫−2 (2x + 1) dx + ∫ 0 (x − 1) dx
2
f ( x) dx +
0
x + x
=
−2
2
x3
4
+ − x =
−
3
3
0
14. Dada la función
xe − x , 0 ≤ x < 1
f ( x) =
1
x + , 1 ≤ x ≤ e
x
a) Muestre que f es seccionalmente continua en el intervalo
[0; e].
∫
b) Calcule
e
0
f ( x) dx.
Solución
a) La función f solo tiene discontinuidad esencial finita en
x = 1, pues
(
x →1
)
lim f ( x) = lim xe − x =
−
−
x →1
1
1
≠ 2 = lim f ( x) = lim x +
+
+
e
x
x →1
x →1
Además,
lim f ( x) = 0 = f (0) y lim f ( x) = e +
x →0
+
x→e
−
1
= f (e)
e
Así, f es continua en [0; e] excepto en x = 1. Por lo tanto, f
es seccionalmente continua en el intervalo [0; e] .
b) Dado que f es seccionalmente continua en el intervalo [0; e] ,
se tiene
∫
e
=
f ( x) dx
0
=
∫
1
∫
1
0
f ( x) dx +
∫
e
1
I=
f ( x) dx
1
xe − x dx + x + dx
0
1
x
∫
e
e
x2
=
xe − x dx + + ln x
0
2
1
1
2
1 e2 + 3 2
2 e
=1 − + + =
−
2
e
e 2 2
∫
1
∫
1
0
xe − x dx
⇒ du =
dx
u = x
−x
−x
dv = e ⇒ v = −e
Al reemplazar en la fórmula de
integración por partes, se tiene
1
− xe − x −
I=
0
∫
1
0
− e − x dx
1
1
2
=− − e − x =−
1
0
e
e
Capítulo 1. Integral definida e integral impropia
55
Ejercicios y problemas propuestos 1.2
1.
2.
Calcule las siguientes integrales definidas:
a)
c)
d)
f)
g)
i)
j)
k)
l)
m)
o)
p)
q)
r)
x dx
8
∫
1
2
∫
π
3
∫
0
π
6
∫
0
∫
1 − x tan x
dx
x + sec x
π
3
x dx
π
4
cot 2 x
∫ (3x
2
0
1
ln 2
4
0
)
3
3x2 + x + 2
x + 1 arctan
∫
0
∫
2
x3dx
1
x2 + 4
Sean f, g, h y F funciones continuas en
tales que
4.
h ( x)
∫ ( ) f (t) dt
g x
Sean f y g funciones continuas en el inter­
valo [− 6; 6] tales que f es una función par y
g es una función impar. Calcule
∫
3
5 g ( x) − xf ( x) + x 4 arctan x + 8 dx
−3
dx
5.
Calcule
∫
3 sen x + cos x
8x5
2
−2
x4 − 1 + 1
dx
dx
x cos (ln x) sen2 (ln x)
2
ln
3 3
2
ln
3
4
e−x
4e −2 x + 9
5/ 2
dx
(x − 1)−3 arcsen (x − 1) dx
6.
La figura 1.2.11 muestra la gráfica de una
función f, donde el área de la región R es
14 2
u .
5
5x
Si g ( x) =
7
∫
2 x +1
2 x −1
f (t ) dt , calcule g′ (1) .
y
2
y = f(x)
1
0
R
1
3
Fig. 1.2.11
56
Cálculo II
xf ' ( x) dx
c) Si f es par y g y h son funciones impares,
entonces F es una función impar.
)
π
6
−3
b) Si f, g y h son funciones impares, entonces
F es una función par.
3
x + 1 dx
∫
∫
−1
a) Si g y h son funciones pares, entonces F es
una función par.
x5 e x dx
π
3
1
f ( x) dx = 3, calcule
Determine el valor de verdad de las
siguientes afirmaciones:
9 − e6x
(6x + 1) dx
n)
sen x
eπ/ 6
3
2
3
4
∫
∫
(
cos2 (2x) dx
π
6
2
54e 3x dx
( )
eπ/ 3
∫
3
ln
2
0
1
3
F ( x) =
e 2 x arcsen e −2 x dx
−1
∫
3.
2
0
π
2
dx
+ x ln( x + 1) dx
2
0
∫
e)
h)
∫ (3x + x) e
∫
x3 e 3 x
∫
(cos x) arctan (2 sen x)
tan x
+
2
dx
5 − 4cos2 x
tan x − 1
1
∫
1
2
( x − 2) 1 − x 2 + x
dx
1 − x2
1
2
−
∫
b)
x +1
3
e x + xe x
1
Si f es una función impar cuya derivada es
continua en tal que=
f (1) 2=
, f (3) 4 y
X
7.
Halle las ecuaciones de las rectas tangente y
normal a la gráfica de la función f dada por
f ( x) = 140x3
∫
2
4x
t + 17
x3
t2 + 6
en el punto de abscisa x = 2.
dt
8.
Dada la función f definida por
x ( x − 2) ,
f ( x) =
log3 ( x − 1) + 2 ,
−1 ≤ x ≤ 2
2<x≤4
a) Verifique que f es una función seccional­
mente continua.
b) Calcule
∫
4
−1
f ( x) dx.
Capítulo 1. Integral definida e integral impropia
57
1.3 Integrales impropias
Una función f tiene discontinui­
dad infinita en x = b si la recta
L : x = b es una asíntota vertical
de la gráfica de f.
En diversas aplicaciones se formulan integrales donde no necesaria­
mente se cumplen las condiciones expuestas en el primer teorema
fundamental del cálculo integral. Algunos de estos casos son:
i) El intervalo de integración se extiende indefinidamente hacia
la derecha, hacia la izquierda o sobre todo el eje X.
y
Y
y = f (x)
00
ii) La función integrando tiene discontinuidad infinita en puntos
interiores o en los extremos del intervalo de integración.
xX
x=b
Fig. 1.3.1
yY
Las integrales que resuelven estas situaciones se denominan in­
tegrales impropias.
El procedimiento para calcular una integral impropia consiste
en transformar la integral en el límite de una integral definida so­
bre un intervalo cerrado donde se pueda aplicar el primer teorema
fundamental del cálculo integral. Así, se tienen los siguientes tipos:
I.
y = f (x)
Integrales impropias en las que al menos un límite
de integración es infinito
Definición 5
00
a
a
bb
Xx
Sea f una función continua en [a ; +∞ . La integral impropia de f so­
bre el intervalo [a ; +∞ . se denota como
∫
Fig. 1.3.2
+∞
a
f ( x) dx
y está dada por
∫
yY
y = f (x)
+∞
a
f ( x) dx = lim
b →+∞
b
∫ f (x) dx
a
Si el límite existe se dice que la integral impropia es convergente.
Si el límite no existe se dice que la integral impropia es divergente.
a
a
Definición 6
bb
00
Fig. 1.3.3
Xx
Sea f una función continua en −∞ ; b] . La integral impropia de f
sobre el intervalo −∞ ; b] se denota por
∫
b
−∞
f ( x) dx
y está dada por
∫
b
−∞
f ( x) dx = lim
a →−∞
∫
b
a
f ( x) dx
Si el límite existe se dice que la integral impropia es convergente.
En caso contrario se dice que la integral impropia es divergente.
58
Cálculo II
Definición 7
Sea f una función continua en −∞; +∞ . Para cualquier número real
c la integral impropia de f en −∞; +∞ denotada por
∫
+∞
−∞
Yy
f ( x) dx
yy == f(x)
f (x)
está dada por
∫
+∞
=
f ( x) dx
−∞
∫
c
−∞
f ( x) dx +
∫
+∞
c
f ( x) dx
0
∫
+∞
−∞
Xx
Fig. 1.3.4
Si las dos integrales del segundo miembro de la igualdad son convergentes, entonces la integral impropia
cc
f ( x) dx es conver-­
gente. Si por lo menos una de las dos integrales del segundo
miembro de la igualdad diverge, entonces la integral impropia
∫
+∞
f ( x) dx es divergente.
−∞
Observación 4
Sea f una función continua tal que para cada x ∈ [a ; + ∞ , f ( x) ≥ 0.
∫
Si
+∞
a
f ( x) dx es convergente, entonces su valor representa el área
de la región infinita D limitada por las gráficas
=
y f=
( x) , x a y
el eje X.
De manera similar se interpretan los valores de las integrales
∫
b
−∞
y
Y
f ( x) dx y
∫
+∞
−∞
f ( x) dx, en caso de que sean convergentes.
yy== ff(x)
(x)
D
0
a
a
Xx
Fig. 1.3.5
Ejemplo 15
Determine si cada una de las siguientes integrales impropias son
convergentes o divergentes.
a)
c)
∫
−1
1
−∞
x
2
∫
+∞
(x − 1) e x dx
0
dx
b)
d)
∫
∫
+∞
1
+∞
1
x
1
−∞ 1 +
dx
x2
dx
Solución
En cada caso la función integrando es continua en el intervalo de
integración. Luego, al usar la definición correspondiente se tiene
a)
∫
1
dx lim
=
a →−∞
− ∞ x2
−1
∫
−1
a
−1
1
1
dx lim −
=
2
→−∞
a
xa
x
1
1
= lim 1 + =
a →−∞
a
Por lo tanto, la integral impropia es convergente.
Capítulo 1. Integral definida e integral impropia
59
+∞ 1
=
b)
dx
1
x
b 1
=
lim
dx
b →+∞ 1 x
∫
b
∫
lim 2 x
1
b →+∞
= lim 2 b − 2 = +∞
b →+∞
Por consiguiente, la integral impropia es divergente.
c)
∫
+∞
0
=
(x − 1) e x dx
b
∫ (x − 1) e dx
lim
x
b →+∞
0
I
Para calcular I se usa el método de integración por partes
u = x − 1 ⇒ du = dx
= e x dx ⇒=
v ex
dv
Luego, al reemplazar en la fórmula de integración por
partes, se tiene
+∞
∫
0
b
lim ( x − 1) e x −
0
b →+∞
(x − 1) e x dx=
o
e x dx
lim (b − 1) e b + 1 − e x
=
{
∫
b
b →+∞
b
0
}
{(b − 1) eb + 1 − eb − 1}
= lim {(b − 2) e b + 2} = +∞
b →+∞
= lim
b →+∞
Por lo tanto, la integral impropia es divergente.
d) Sea I =
Yy
∫
+∞
1
−∞1+
x2
dx
La integral I se puede expresar como
y = arctan x
π
y=−
2
x →−∞
2
=
I
∫
0
π
2
π
lim arctan x =
x →+∞
2
Fig. 1.3.6
=
=
1
−∞ 1 +
x
X
0
lim arctan x = −
y=
π
lim
a →−∞
0
x
dx +
2
1
∫ 1+ x
a
2
∫
+∞
0
1
1 + x2
dx + lim
b →+∞
dx
b
1
∫ 1+ x
0
2
dx
b
0
lim [arctan x]a + lim [arctan x]0
a →−∞
b →+∞
π π
= lim [− arctan (a)] + lim arctan (b) =− − + =π
a →−∞
b →+∞
2 2
En consecuencia, la integral impropia es convergente.
60
Cálculo II
II. Integrales impropias cuando la función integrando tiene
discontinuidad infinita
Definición 8
Sea f una función continua en el intervalo a ; b] con discontinuidad
infinita en x = a. La integral impropia de f sobre el intervalo a ; b]
se denota por
y
Y
yy== ff(x)
(x)
b
∫ f (x) dx
a
b
∫ f (x) dx = lim ∫
a
a tt
a
0
y está dada por
t → a+
b
t
bb Xx
Fig. 1.3.7
f ( x) dx
Si el límite existe, se dice que la integral impropia es convergente.
Si el límite no existe, se dice que la integral impropia es divergente.
Definición 9
Sea f una función continua en el intervalo [a ; b con discontinuidad
infinita en x = b. La integral impropia de f sobre el intervalo [a ; b
se denota por
b
∫ f (x) dx
a
y
Y
y está dada por
b
f (x)
yy = f(x)
t
∫ f (x) dx = lim ∫ f (x) dx
a
t →b−
a
Si el límite existe, se dice que la integral impropia es convergente.
Si el límite no existe, se dice que la integral impropia es divergente.
tt x = b Xx
x=b
a
a
00
Fig. 1.3.8
Definición 10
Sea f una función continua en los intervalos [a ; c y c ; b] con
discontinuidad infinita en x = c. La integral impropia de f sobre
[a ; c c ; b] se denota por
yY
yy == f(x)
f (x)
b
∫ f (x) dx
a
00
y está dada por
b
c
a
a
f ( x) dx
∫=
∫
f ( x) dx +
∫
b
c
f ( x) dx
a
a
c bb
xx==c c
x
X
Fig. 1.3.9
Si las dos integrales impropias del segundo miembro son convergentes, se dice que la integral impropia
b
∫ f (x) dx es convergente.
a
Si por lo menos una de las integrales impropias del segundo miem­
bro de la igualdad es divergente, se dice que la integral impropia
b
∫ f (x) dx es divergente.
a
Capítulo 1. Integral definida e integral impropia
61
Ejemplo 15
Determine si cada una de las siguientes integrales es convergente o divergente.
a)
c)
∫
1
∫
3
1
03
0
x
dx
1
(x − 1)
b)
dx
2/3
d)
∫
e2
e
1
dx
2x − xlnx
1
x2 + 3
∫ (x + 1) (x − 1) dx
2
−1
Solución
En cada caso, al determinar los puntos de discontinuidad infini­
ta de la función integrando en el intervalo de integración y apli­
car la definición correspondiente, se tiene
∫
La función
f ( x) =
∫
1
3
1
1 1
1 1
3
dx lim
dx lim x 2 / 3
=
=
a)
3
3
+
+
0 x
a x
a →0
a →0 2
a
x
tiene discontinuidad infinita en
x = 0.
3 3
3
= lim − a2 / 3 =
+ 2
2
a →0
2
Por lo tanto, la integral impropia es convergente.
b) I =
∫
e2
e
1
dx = − lim
2x − xlnx
b →( e 2 )−
La función
f ( x) =
1
1
= −
2 x − x ln x
(ln x − 2) x
tiene discontinuidad infinita en
x = e2
f ( x) =
b
= − lim ln ln b − 2 − ln lne − 2 = − (− ∞) = + ∞
b →( e 2 )−
+
0
0
Por lo tanto, la integral impropia es divergente.
=
1
(x − 1)2/ 3
tiene discontinuidad infinita en
x = 1.
∫
1
1
dx
e (lnx − 2)
x
du
u
=
− lim [ln lnx − 2 ]e
2 −
b→( e )
c) I =
La función
b
∫
3
1
0
(x − 1)2/ 3
∫
1
1
2/3
dx
dx +
(x − 1)
0
I1
=
I1 lim
−
b →1
∫
∫
1
3
dx
2/3
x − 1)
(
1
I2
1
1/ 3 b
=
dx lim 3 ( x − 1)
2
/
3
−
0
0 x −1
b →1
( )
b
1/ 3
= lim 3 (b − 1) =
+ 3 3
−
b→1
Así, la integral impropia I1 es convergente.
62
Cálculo II
=
I 2 lim
a →1+
∫
1
1/ 3 3
=
dx lim 3 ( x − 1)
2
3
/
a
a x −1
a →1+
( )
3
1/ 3
1/ 3
= lim 3 (2) − 3 (a =
− 1) 3 3 2
+
a→1
Luego, la integral impropia I 2 es convergente.
Como las integrales impropias y I 2 son convergentes, la
integral impropia I es convergente.
1
x2 + 3
=
dx lim
−1 x 2 + 1 ( x − 1)
b →1−
∫ (
=
d) I
= lim
b →1−
= lim
−
b →1
∫
)
x2 + 3
b
∫ (x + 1) (x − 1) dx
2
−1
La función integrando tiene dis­
continuidad infinita en x = 1.
2
−x − 1
+
dx
2
−1 x + 1
x − 1
b
x
1
2
− 2
− 2
+
dx
−1 x + 1 x + 1 x − 1
∫
b
(
)
2
b
1
= lim − ln x 2 + 1 − arctan x + 2 ln x − 1
−
b →1 2
−1
(
x2 + 3
Ax + B
C
=
+
2
2
x + 1 ( x − 1) x + 1 x − 1
)
x + 3=
( Ax + B)(x − 1) + C (x2 + 1)
de donde A = –1, B = –1 y C = 2.
π 3
1
2
= lim − ln b + 1 − arctanb + 2ln b − 1 − − ln2
4 2
b →1− 2
0+
= −∞
(
)
Por lo tanto, la integral impropia es divergente.
Observación 5
Para calcular integrales es importante determinar previamente la
continuidad de la función integrando en el intervalo de integración.
∫
Por ejemplo, si al calcular la integral
2
1
0
(x − 1)2
dx no se analiza la
continuidad de la función integrando en el intervalo de integración,
se tendría el siguiente resultado erróneo:
∫
2
0
2
1
1
dx =−
=−1 − 1 =−2
2
x − 1 0
(x − 1)
Lo correcto es analizar la continuidad de la función integrando
en el intervalo [0; 2] , de lo cual se observa que la función tiene
discontinuidad infinita en x = 1 por lo que se trata, de acuerdo con
la definición 10, de una integral impropia. Luego,
2
1
=
dx
0 x −1 2
( )
∫
∫
1
1
dx +
2
x − 1)
(
0
I1
∫
2
1
dx
2
x − 1)
(
1
I2
Capítulo 1. Integral definida e integral impropia
63
1
1
=
dx lim
0 x −1 2
b →1−
( )
∫
=
I1
∫
b
1
0
(x − 1)2
dx
b
1
1
lim −
= lim − =
=
− 1 +∞
−
−
x
b
1
1
−
−
0 b→1
b→1
Dado que la integral impropia I1 es divergente se concluye que
∫
2
1
0
(x − 1)2
dx es una integral divergente.
Ejercicios y problemas resueltos 1.3
1.
Determine la convergencia o divergencia de cada una de las
siguientes integrales impropias.
a)
∫
dx
+∞
e
c)
∫
+∞
e)
∫
+∞
−∞
3
x (lnx)
2
x 3− x dx
x
−∞ 1 +
x
2
∫
b)
dx
+∞ π
− arctan x dx
2
0
e x dx
0
d)
∫ (e + 1)(e + 2)
f)
∫
x
−∞
0
−∞
x
e t sent dt
Solución
a) La función integrando f ( x) =
1
3
x (lnx)
es continua en el
intervalo de integración [ e ; +∞ . Luego
=
I
+∞
dx
=
e x lnx 3
( )
∫
lim
b →+∞
b
)
∫ (lnx
e
u
−3
1
dx
x
du
b
(lnx)−2
1
1
1
=
=
1
=lim
− lim
−
b →+∞ −2
2 b→+∞ (lnb)2 2
e
Por lo tanto, la integral impropia es convergente.
b) =
Sea I
∫
+∞ π
0
− arctan x dx
2
Por definición de integral impropia se tiene
I lim
=
b →+∞
bπ
0
= lim
b →+∞
∫
64
Cálculo II
∫ 2 − arctan x dx
b
π
dx −
arctan x dx ….. (α)
02
0
I1
b
∫
Para calcular la integral I1 se utiliza el método de inte­
gración por partes, donde
dx
du
=
u arctan x ⇒=
1 + x2
v x
=
⇒
=
dv dx
Luego
∫
=
I1
b
dv
u
x dx
b
[x arctan x]b0 − ∫ 0
=
arctan x dx
0
dz
1 b 2x dx
= [x arctan x] − = =
2 0 1
+ x2
∫
b
0
1 + x2
[x arctan x]b0 −
b
1
ln 1 + x 2
0
2
(
)
z
1
= b arctan b − ln 1 + b2
2
(
)
Al reemplazar I1 en ( ) se obtiene
π b
1
I lim x − b arctanb − ln 1 + b2
=
b →+∞ 2
2
0
(
)
π
L1 lim b − arctanb (+∞)(0)
=
b →+∞ 2
π − 2 arctan b
L1 = lim
b →+∞
2b−1
1
π
= lim b − b arctanb + ln 1 + b2
b →+∞ 2
2
(
)
Al aplicar la regla de L’Hopital
se tiene
π
1
= lim b − arctanb + ln 1 + b2
b →+∞ 2
2
(
)
−2
2
L1 = lim 1 + b
b →+∞ −2
2
b
π
1
= lim b − arctanb + lim ln 1 + b2
b →+∞ 2
2 b→+∞
(
)
L2
L1
Por lo tanto, la integral impropia es divergente.
c) Sea I =
∫
−∞
=
I
∫
+∞
(
)
L2 = lim ln 1 + b2 = +∞
b →+∞
2
x. 3− x dx.
2
Como la función integrando f ( x) = x.3− x es continua en
, de la definición de integral impropia para el valor c = 0
se tiene
0
b2
= lim
=
1
b →+∞ 1 + b 2
= +∞
+∞
0
0
− x2
x. 3
= lim −
a →−∞
1
2
dx +
∫
x2
0 −
∫3
a
u
+∞
0
− x2
x. 3
∫
au=
du
dx
1
. (−2xdx) + lim −
b→+∞ 2
du
0
x2
b −
∫3
0
u
au
+k
ln a
2
. (−2 xdx)
du
lim 3− x = 0
x →+∞
2
lim 3− x = 0
x →−∞
b
2
2
1 3− x
1 3− x
+ lim −
= lim −
a →−∞ 2 ln 3
b →+∞ 2 ln 3
a
0
Capítulo 1. Integral definida e integral impropia
65
)
(
)
(
2
2
−1
1
lim 1 − 3− a −
lim 3− b − 1
a
→−∞
b
→+∞
2ln3
2ln3
=
−1
1
=
(1) −
(−1) 0
2ln3
2ln3
=
Por lo tanto, la integral impropia es convergente.
d) Sea I =
1
=
(u + 1)(u + 2)
1
=
A
B
+
u +1 u + 2
A (u + 2) + B (u + 1)
(u + 1)(u + 2)
(u + 1)(u + 2)
1= A (u + 2) + B (u + 1)
u =−2 : 1 =− B ⇒ B =−1
u=
−1 : 1 =
A ⇒A=
1
Luego
1
=
(u + 1)(u + 2)
e x dx
0
∫ (e + 1)(e + 2)
x
−∞
x
Dado que la función integrando es continua en el inter­
valo de integración −∞; 0] , de la definición de integral im­
propia se tiene
e x dx
0
I = lim
a →−∞
∫ (e + 1)(e + 2)
x
a
x
Al hacer el cambio de variable u = e x resulta du = e x dx y
los nuevos límites de integración son
x = 0 ⇒ u = e 0 = 1
a
x = a ⇒ u = e
1
−1
+
u +1 u + 2
Luego
=
I
lim
a →−∞
du
=
a
e (u + 1)(u + 2)
∫
1
lim
∫
1
a →−∞ e
a
1
1
−
du
u +1 u + 2
1
1
u +1
=
I lim [ln u + 1 − ln u =
+ 2 ]e a lim ln
a →−∞
a →−∞ u + 2
ea
2
e a + 1
2
1
4
I = lim ln − ln a
= ln − ln = ln
a →−∞
3
2
3
3
e + 2
Por consiguiente, la integral impropia es convergente.
Observación
Cuando la función f es continua e im­
par en el intervalo [– a; a] , se tiene
∫
a
−a
f ( x) dx = 0
Sin embargo, este resultado no se pue­
de extender al caso de las integrales
impropias de la forma
∫
+∞
−∞
f ( x) dx ,
donde f es continua e impar en .
Esto se puede observar en el ejerci­
cio 1e donde la función integrando
es continua e impar en .pero la in­
tegral impropia diverge.
e) Sea I =
∫
x
+∞
dx
x2
Como la función integrando es continua en , de la defi­
nición de integral impropia para el valor c = 0 se tiene
=
I
−∞ 1 +
0
x dx
2
−∞
Cálculo II
x dx
2
0
I1
I2
0
1 0 2x dx
1
=
I1 lim =
lim ln 1 + x 2
2
a
a →−∞ 2 a 1 + x
a →−∞ 2
(
∫
=
1
lim ln (1) − ln 1 + a2 = −∞
2 a→−∞
0
(
−∞
66
+∞
∫
∫
1 + x
1 + x
+
)
)
Como la primera integral impropia I1 es divergente no
es necesario calcular I 2.
Por consiguiente, la integral impropia I es divergente.
f) Sea I =
∫
0
e t sent dt
−∞
Como la función integrando f (t ) = e t sent es continua en
el intervalo de integración
integral impropia se tiene
0
−∞; 0] , de la definición de
∫ e sent dt …….(∗)
Para calcular I = e sent dt se utiliza el método de inte∫
=
I
lim
a →−∞
t
a
t
1
gración por partes, donde
u et
=
⇒=
du et dt
dv cost dt ⇒
=
v sent
=
Luego
∫
I1 = −e t cost + e t cost dt
…(∗∗)
I2
Al aplicar el método de integración por partes a I 2 , se
tiene
u e t
=
⇒=
du e t dt
dv cos t dt ⇒
v sent
=
=
∫
Luego
=
I 2 e t sent − e t sent dt
Al reemplazar I 2 en (∗∗) se obtiene
∫
I1 =
−e t cost + e t sent − e t sent dt
I1
t
t
=
2I1 e sent − e cost
I1=
1 t
e sent − e t cost + k
2
(
)
Luego
I
=
0
0
1
lim
e t sent dt lim e t sent − et cost
=
a →−∞ 2
a →−∞ a
a
∫
(
)
lim e t sent = 0
t →−∞
1
1
−1 − e a ( sen a − cos a) =−
a →−∞ 2
2
= lim
Por consiguiente, la integral impropia es convergente.
Capítulo 1. Integral definida e integral impropia
67
2.
Determine la convergencia o divergencia de cada una de las
siguientes integrales impropias.
a)
d)
∫
1
dx
0 ex
− e−x
∫
0
dx
−∞
∫
b)
e −1
dx
03
x −1
1
dx
−1
2
∫
e)
x
2
c)
∫
+∞ lnx dx
0
x
x −1
Solución
a) Sea I =
dx
1
∫
x
e − e−x
La función integrando tiene discontinuidad infinita en
x = 0.
0
Luego, por definición de integral impropia se tiene
1
dx
=
= lim
I lim
+ a
+
1
a →0
e x − x a →0
e
∫
∫
1
e x dx
a e2x
−1
x
=
u e=
, du e x dx , los nue­
Al hacer el cambio de variable
vos límites de integración son
x = a ⇒ u = e a
x =1 ⇒ u =e
Así,
e
e
du
1 u − 1
=
I lim
=
lim ln
a
2
u + 1 e a
a → 0+ e u − 1 a → 0+ 2
∫
du
1
u−a
ln
=
+C
2
2
2
a
u
+a
u −a
1 e − 1 1 e a − 1
= lim ln
= +∞
− ln
a → 0+ 2
e + 1 2 e a + 1
∫
Por consiguiente, la integral impropia es divergente.
b) Sea I =
2
∫
0 3
dx
x −1
Como la función integrando tiene discontinuidad infinita en
x = 1 ∈ [0; 2] , de la definición de integral impropia se tiene
=
I
∫
1
03
dx
x −1
+
∫
2
dx
1 3
x −1
b
2
(x − 1)−1/ 3 dx + lim+ ∫ a (x − 1)−1/ 3 dx
− ∫0
= lim
b →1
a →1
b
2
2/3
2/3
3
3
= lim ( x − 1) + lim ( x − 1)
− 2
+ 2
b →1
0 a→1
a
68
Cálculo II
=
(
)
(
)
3
2/3
2/3
lim (b − 1) − 1 + lim 1 − (a −=
1) 0
+
2 b→1−
a →1
Por lo tanto, la integral impropia es convergente.
+∞ ln x dx
∫
c) Sea I =
0
x
Dado que la función integrando tiene discontinuidad in­
finita en x = 0 y el límite superior de integración es +∞ , es
necesario expresar la integral dada como la suma de dos
integrales impropias de los tipos tratados. Así, para el valor
c = 1 se tiene
∫
=
I
1 lnx dx
+∞ lnx dx
lnx dx
=
+
0
0
1
x
x
x
+∞
∫
∫
I1
I2
1
(lnx)2
dx
I1 lim
lnx
=
=
. lim+
x a →0 2
a →0+ a u
a
∫
1
En el caso de que se presente una
integral de la forma
∫
+∞
a
f ( x) dx
donde la función f tiene disconti­
nuidad infinita en x = a (que no ha
sido tratada en las definiciones an­
teriores), es necesario expresarla en
dos sumandos de modo que cada
sumando sea una de las integrales
impropias tratadas, es decir
+∞
b
+∞
a
a
b
f ( x) dx
∫=
∫ f (x) dx + ∫
du
(lna)2
= −∞
= lim 0 −
2
a → 0+
f ( x) dx,
b ∈ a; + ∞
Como la integral impropia I1 es divergente ya no es ne­
cesario calcular I 2 . Por lo tanto, la integral impropia I es
divergente.
d) Sea I =
∫
dx
0
−∞
x
e −1
Como la función integrando tiene discontinuidad infinita
en x = 0 y el límite inferior de integración es −∞ , es necesario
expresar la integral dada como la suma de dos integrales im­
propias de los tipos tratados. Así, para el valor c = −1 se tiene
=
I
0
dx
=
x
−∞ e − 1
∫
dx
−1
dx
0
∫
1 ∫e
1
−
e −
−∞
x
+
−1
I1
I2
−1
dx
=
=
I1 lim
lim
b →−∞ b e x 1 − e − x
b →−∞
∫
=
(
)
−1
x
lim ln 1 − e −=
b →−∞
= −∞
x
b
∫
du
−1 e − x dx
b
−x
1
−
e
u
(
lim ln 1 − e − ln 1 − e − b
b →−∞
)
Por lo tanto, la integral impropia I1 es divergente y ya no
es necesario calcular I 2 para concluir que la integral impro­
pia I es divergente.
Capítulo 1. Integral definida e integral impropia
69
e) Sea I =
1
dx
−1
2
∫
x −1
Dado que la función integrando tiene discontinuidad in­
finita en los límites de integración x = 1 y x = –1, es necesario
expresar la integral dada como la suma de dos integrales
impropias de los tipos tratados. Así, para c = 0 ∈ −1; 1 ,
se tiene
1
0
1 dx
dx
dx
=
+
0 2 −1
−1 x 2 − 1
−1 x 2 − 1
x
∫
=
I
∫
∫
I1
0 dx
=
lim
+
a x2 − 1
a →(−1)
∫
=
I1
I2
0
x −1
1
lim ln
+ 2
x
+ 1 a
a →(−1)
1
a −1
lim 0 − ln
= −∞
+
2
a +1
a →(−1)
=
Como la integral impropia I1 es divergente ya no es ne­
cesario calcular I 2 para concluir que la integral impropia I
es divergente.
3.
Una función de densidad de probabilidad es cualquier función
no negativa f con dominio , para la cual
∫
+∞
−∞
f ( x) dx = 1
Verifique que la función f definida por
x<0
0 ,
f ( x) = −αx
αe , x ≥ 0 , α > 0
es una función de densidad de probabilidad.
Solución
i) Como la función f tiene dos reglas de correspondencia y en
ambas se verifica que f ( x) ≥ 0, entonces la función f es no
negativa.
=
I
=
=
70
Cálculo II
−∞
∫
−∞
0 dx +
lim
a →−∞
∫
0
a
∫
−∞
0
+∞
f ( x) dx
∫=
0
+∞
f ( x) dx
En efecto,
∫=
∫ f (x) dx + ∫ f (x) dx
=
ii) Se debe verificar
que I
+∞
0
−∞
+∞
0
α e −αx dx
0 dx − lim
b →+∞
∫
b
0
−αx
e
−α dx)
(
eu
du
b
0
= lim [k]a − lim e −αx
0
a →−∞
b →+∞
= lim [k − k] − lim e −αb −=
1 1
a →−∞
b →+∞
Por lo tanto, la función f es una función de densidad de
probabilidad.
4.
La función gamma, denotada por Γ y utilizada en estadística,
está dada por
=
Γ (α )
∫
+∞
t α−1e − t dt ,
0
α>0
Demuestre que
Γ (α + 1) =α Γ (α) , α > 0
Solución
Por definición de la función gamma se tiene
Γ (α + 1) =
∫
+∞
0
t(
= lim
α+1) −1 −t
∫
e dt
b
t α e −t dt
…(∗)
b →+∞
0
I1
Al calcular I1 mediante el método de integración por partes
se tiene
u =
⇒ du =
α t α−1dt
tα
−t
−t
dv =e dt ⇒ v =−e
b
b
0
0
∫ (−e )(α t
− 0) + α t e
∫
−t α e −t −
I1 =
(
= −bα e − b
−t
b
α−1
α−1 −t
0
dt
)
dt
Al reemplazar I1 en (∗) resulta
Γ (α=
+ 1)
Por lo tanto,
(
b →+∞
)
lim −bα e − b + lim α
= 0+α
∫
b →+∞
∫
b
0
t α−1e −t dt
+∞
0
(
b →+∞
)
− lim
lim −bα e − b =
b →+∞
bα
eb
0
=
t α−1e −t dt = αΓ (α) , α > 0
Γ (α + 1) =αΓ (α) , α > 0
5.
La transformada de Laplace de una función continua f en el
intervalo 0; +∞ está dada por
=
F (s) =
{ f (t)}
∫
+∞
0
e − st f (t ) dt
Capítulo 1. Integral definida e integral impropia
71
donde el dominio de la función F está formado por los valores
de s, para los cuales la integral impropia es convergente.
Obtenga la transformada de Laplace para cada una de las
siguientes funciones
a) f (t ) = 1
b) f (t ) = e t
Solución
a) Al aplicar la definición de transformada de Laplace se tiene
∫
F=
(s) =
{1}
+∞
e − st (1=
) dt
0
lim
b →+∞
∫
b
0
e − st dt
b
e − st
e − bs 1 1
= lim
− = , s>0
= lim
b →+∞ − s
0 b→+∞ −s −s s
Por lo tanto,
Si a < 0 ,
1
, para s > 0
s
F=
(s) =
{1}
lim e ab = 0
b →+∞
b) Para f (t ) = e t se tiene
+∞
e t dt
{ } ∫ 0 e −st =
=
F (s) =
et
b
e t (1− s)
=
lim
b →+∞ 1 − s
0
=
=
lim
b →+∞
∫
b
t 1− s
e ( ) dt
0
e b(1− s)
1
−
lim
b →+∞ 1 − s
1 − s
1
, para s > 1
s −1
Luego
{}
=
F (s) =
et
Ejercicios y problemas propuestos 1.3
1.
Sin calcular la integral determine si las si­
guientes integrales son impropias. ¿Por qué?
a)
c)
e)
72
Cálculo II
x2
∫
1
∫
+∞
4+x
−∞
∫
0
π
0
2
dx
2
e − x dx
dx
2 + 2cosx
b)
d)
f)
∫
4e
e
dx
(x + 1) ln (x + 1)
∫
10
dx
2 3
x−2
∫
1
dx
−1
x3
x −1
2.
1
, para s > 1
s −1
Determine si cada una de las siguientes inte­
grales impropias es convergente o divergente.
a)
∫
1
+∞
x
1
c)
∫
+∞
e)
∫
+∞
g)
∫
−∞
2π
4
b)
∫ (x + 4)
−∞
∫
sen2 x dx
f)
∫
h)
∫
dx
3
x + 3x
2
7/ 2
+∞
d)
−2 x
x dx
0
dx
e
1
−∞
dx
3
ln ( x − 2) dx
1
4x dx
−∞
1 + x4
+∞
0
e −t cost dt
i)
k)
m)
3.
+∞
∫
+∞ ( arctan
∫
+∞
−∞
2
x3 e − x dx
1+ x
−∞
x)4
2
dx
+∞
∫ x (x + 3)
j)
1
2
+∞
x 2 lnx
∫ (1 + x )
dx l)
1
3
dx
2
x
1
5.
(1 + x )
1/ 3
c)
e)
g)
i)
k)
∫
dx
1
0 3 1−
1 51/ x
∫
∫
x
dx
x2
0
b)
3
∫
∫
ln ( x − 2) dx
2
π
4
0
1
sen2 x
+∞
x5
3
1
dx
1 − x3
0
xe x
−2
(1 + x)2
∫
d)
dx
∫
∫
(x + 1) (x2 + 3)
π
2
x
π
2
sen2 x
−
b)
∫
∫
+∞
0
ce − st dt =
dx
dx
−1
(x − 1)2 (x + 1)2
1
0
s2
e − st t dt =
d)
∫
∫
+∞
0
e − st=
sen (at ) dt
+∞
8.
s>a
a
s + a2
x>0
0 ,
−βx
βe ,
x≥0
3
(
π 1 + 9x2
)
,
, a<b
β>0
, x∈
x<0
x≥0
dx
¿Para qué valor de la constante k la integral
impropia converge a 8?
+∞
ke
− x−2
dx
Pruebe que
∫
0
4 2
=
e − c x dx
−∞
2
k
x4
0
−∞
− st at
1
, a≤x≤b
b−a
0 ,
x<a o x>b
¿Para qué valores de la constante k la inte­
gral impropia converge a 4?
∫
7.
, s>a
Una función de densidad de probabilidad
es cualquier función no negativa f definida
en un intervalo I, para la cual la integral
definida de f en el intervalo I es igual a 1.
Verifique que las siguientes funciones son
funciones de densidad de probabilidad en el
intervalo − ∞; + ∞ .
∫
1
e e dt
,
c) =
0
s−a
+∞
6.
s + a2
(s − a)2
0 ,
d) f ( x) =
− x2
2xe ,
c
s
+∞
− st at
0
c) f ( x)
=
dx
1
∫
l)
x +2
−1
∫
j)
2
1
2
1
te e dt
∫=
∫
Sean a, c y s números reales, siendo s > 0.
Pruebe que
a)
0
∫
f)
h)
dx
e − st cos (at ) dt =
x
dx
−2 x + 2
=
a) f ( x)
3
1 e− x
dx
0 3 2
x
2
=
b) f ( x)
2+x
dx
0
2−x
0
s
+∞
+∞
f)
dx
2/3
∫
e)
3/ 2
Determine si cada una de las siguientes inte­
grales impropias es convergente o divergente.
a)
4.
∫
1
c
2
∫
0
−∞
2
e − x dx ,
c≠0
, a≠0
Capítulo 1. Integral definida e integral impropia
73
1.4Revisión del capítulo
La secuencia de los temas tratados en el capítulo se presenta en el
siguiente esquema.
Integral definida
de una función
Suma de Riemann
Definición
Propiedades
Teoremas fundamentales
del cálculo integral
Integración por
partes de una
integral definida
Cambio de variable
en una
integral definida
Integración de
funciones seccionalmente
continuas
Integrales impropias
Ejercicios y problemas resueltos 1.4
1.
La gráfica de la función f está formada por segmentos de rec­
tas y dos semicircunferencias, tal como se muestra en la figura
1.4.1. Use fórmulas de áreas elementales para calcular cada una
de las siguientes integrales definidas.
a)
∫
4
−8
f ( x) dx
b)
∫
11
−8
f ( x) dx
c)
∫
11
−8
f ( x) dx
Y
4
y = f(x)
2
–8
–6
–4
–2
0
7
2
–2
Fig. 1.4.1
74
Cálculo II
4
6
11
8
10
X
Solución
En la figura 1.4.2 se muestran las regiones limitadas por la
gráfica de la función f y el eje X.
YY
44
22
y = f (x)
R
R11
−8
–8
−–66
−–22
−
–44
00
R2
R
2
2
2
R33
R
44
7
7
11
88 R
R4 10
6
4
−2
–2
XX
Fig. 1.4.2
Fig. 1.4.2
De la figura 1.4.2 y de la interpretación geométrica de la
integral definida se tiene
a)
∫
4
−8
∫
−8
b) I =
=
−4
f ( x) dx =f ( x) dx +
=
∫
11
−8
∫
∫
4
−4
f ( x) dx =
A (R1 ) − A (R2 )
1
1
2
π (2) − (8 + 4)(2) = 2π − 12
2
2
f ( x) dx
−4
−8
f ( x) dx +
∫
4
−4
f ( x) dx +
∫
7
4
f ( x) dx +
∫
11
7
f ( x) dx
= A (R1 ) − A (R2 ) + A (R3 ) − A (R4 )
= 2π − 12 + 6 − 2π = −6
c) I =
=
=
∫
11
∫
−4
∫
−4
−8
−8
−8
f ( x) dx
f ( x) dx +
f ( x) dx −
∫
∫
4
−4
4
−4
f ( x) dx +
f ( x) dx +
∫
7
∫
7
4
4
f ( x) dx +
f ( x) dx −
∫
∫
11
7
11
7
f ( x) dx
f ( x) , si f ( x) ≥ 0
f ( x) =
− f ( x) , si f ( x) < 0
f ( x) dx
= A (R1 ) − [− A (R2 )] + A (R3 ) − [− A (R4 )]
= 2π + 12 + 6 + 2π = 4π + 18
Otra forma de calcular esta integral es a partir de
la gráfica de la función y = f ( x) que se muestra en la
figura 1.4.3.
Capítulo 1. Integral definida e integral impropia
75
Y
y = f ( x)
R1
–8
4
2
R3
R2
–6
–4
–2
0
–2
2
4
6 7 8
R4
10 11 X
Fig. 1.4.3
De la figura 1.4.3 y de la interpretación geométrica de la
integral definida, se tiene
∫
11
f ( x) dx = A (R1 ) + A (R2 ) + A (R3 ) + A (R4 )
−8
= 2π + 12 + 6 + 2π = 4π + 18
2.
Sean f y g funciones continuas en el intervalo [−8; 8] , tales que
f es una función impar y g es una función par.
Si se sabe que
∫
−4
∫
−4
−8
∫
−4
f ( x) dx = −7 y
−8
a) Calcule
b) Halle
∫
4
g ( x) dx =
−8 ,
g ( x) dx =
−16,
∫
8
−4
0
−8
∫
4
0
f ( x) dx = 3
[3g (x) − 5 f (x)] dx
[4 f (x) + 2 g (x)] dx
Solución
a) Al aplicar las propiedades de la suma de integrales definidas
y de la multiplicación de una integral definida por un
escalar, se obtiene
I=
0
∫− 8[3g (x) − 5 f (x)] dx =
∫
3
0
−8
g ( x) dx − 5
∫
0
−8
f ( x) dx
Luego, como f es una función impar y g es una función
par, por la propiedad aditiva de la integral se tiene
76
Cálculo II
I 3
=
−4
∫
= 3
−8
g ( x) dx +
−4
∫
g ( x) dx +
−8
∫
0
∫
0
8
g ( x) dx − 5 −
−4
∫
g ( x) dx + 5
−4
∫
Dado que f es una función impar en
[−8; 8] resulta
8
f ( x) dx
0
0
∫
f ( x) dx
∫
b) Al aplicar la propiedad de la integral de una suma de
funciones, resulta
∫
I=
−4
[4 f (x) + 2 g (x)] dx =
4
∫
8
−4
f ( x) dx + 2
∫
8
−4
g ( x) dx
Luego, por la propiedad aditiva de las integrales
definidas se tiene
I= 4
∫
4
f ( x) dx +
−4
∫
8
4
f ( x) dx + 2
∫
4
−4
g ( x) dx +
∫
8
4
a)
c)
e)
(x − 1) 3 ln 3 − 3
∫− 1 (x − 1)2
0
∫
∫
x
1 + 2x
1
x+e
0
−2(x −1)
π3 / 8
dx
dx
π / 64 3
3
2
x sen
dx
( x)
4 3
∫
b)
e
2
1
1
dx
x 9 − ln2 x
∫
f)
∫ (x + 1) ln (x + 1) dx
1
3
−8
f ( x) dx +
∫
8
0
f ( x) dx =
0
de donde se obtiene
∫
0
−8
f ( x) dx = −
∫
8
0
f ( x) dx
Además, como g es una función par
en el intervalo [− 4; 4] , se tiene
∫
∫
x arctan
−2
∫
4
−4
g ( x) dx = 2
∫
0
−4
g ( x) dx = −16
−4
4
−4
f ( x) dx = 0
y como g es una función par, su
gráfica es simétrica con respecto al
eje Y , luego
∫
( x ) dx
d)
0
0
Como f es una función impar
Calcule cada una de las siguientes integrales definidas
x
f ( x) dx = 0
Luego,
g ( x) dx
0
g ( x) dx = −8
=4 [0 + 7] + 2 [−16 + (−8)] =−20
3.
−8
y por la propiedad aditiva resulta
= 3[−8 + (−8)] + 5[3 + 7] = 2
8
8
3
8
4
g ( x) dx =
∫
−4
−8
g ( x) dx
2
0
Solución
a) Como la función integrando es la derivada de la función
∫
3x
f ( x) =
, se tiene
x −1
(x − 1) 3x ln 3 − 3x
dx
2
∫− 1 (x=
− 1)
0
b
a
f ' ( x=
) dx
)]ba
[ f (x=
f (b) − f (a)
0
0 3x ’
3x
dx
=
−1 x −1
x − 1 −1
∫
5
1
=(−1) − − =−
6
6
Capítulo 1. Integral definida e integral impropia
77
b) Sea I =
∫
e2
dx
x 9 − ln2 x
Para calcular esta integral, un cambio de variable
adecuado es
1
1
u = lnx ⇒ du = x dx
x = 1 ⇒ u = ln1 = 0
2
2
x = e ⇒ u= ln e = 2
Luego,
e2
dx
=
1 x 9 − ln2 x
∫
=
I
∫
du
2
0
9 − u2
2
u
2
= =
arcsen arcsen
3 0
3
∫
c) Sea I =
=
1 + 2x
1
0
−2 x −1
x+e ( )
dx
1 1 + 2x
=
dx
1
0
x + 2 x −1
e( )
∫
∫
1 e 2(x −1)
2 x −1
+ 2 xe ( )
2 x −1
xe ( ) + 1
0
dx
2 x −1
=
z xe ( ) + 1 , se obtiene
Al hacer el cambio de variable
(
)
2 x −1
2 x −1
2 x −1
z =
xe ( ) + 1 ⇒ dz =e ( ) + 2 xe ( ) dx
x 0
=
=
⇒z 1
=
=
⇒z 2
x 1
Luego, la integral I en la variable z es
=
I
d) Sea I =
2 dz
∫=
z
1
∫
1
3
0
2
z ]1
[ln=
x arctan
ln 2
( x ) dx
3
Al hacer el cambio de variable z = 3 x , se tiene
z = 3 x ⇒ x = z3 ⇒ dx = 3z2 dz
=
=
⇒z 0
x 0
=
=
⇒z 1
x 1
Luego, la integral I en la variable z es
=
I
1
1
z arctan ( z) 3z dz
∫=
∫ arctan (z) .3z dz
0
2
3
0
Para calcular esta integral por el método de integración
por partes se selecciona
78
Cálculo II
dz
du
=
=
u arctan ( z) ⇒
1 + z2
3z 4
dv 3z3dz =
=
⇒
v
4
Así, por la fórmula de integración por partes resulta
1
3z 4
3
=
I
arctan ( z) −
4
0 4
3π 3
−
16 4
=
∫
1
2
z −1+
0
z4
1
∫ 1+ z
0
2
z4
1 + z2
dz
=
z4 − 1 + 1
z2 + 1
z 2 − 1)( z 2 + 1) + 1
(
=
z2 + 1
1
= z2 − 1 + 2
z +1
1
dz
1 + z2
1
3π 3 z3
=
− − z + arctan ( z)
16 4 3
0
3π 3 1
π 1
−
− 1 + =
16 4 3
4 2
=
=
e) Sea I
π3
8
∫
∫
dx
=
π3 3 2
x sen4 3 x
( )
64
π3
8
π3
64
dx
x
2/3
( )
sen4 x1/ 3
Al hacer el cambio de variable z = x1/ 3 se obtiene
z =
x=
x =
x1/ 3 ⇒ x = z3 ⇒ dx = 3z 2 dz
π3
π
⇒ z=
64
4
π3
π
⇒ z=
8
2
Luego, la integral I en la variable z es
=
I
π
2
3z 2 dz
=
3
π 2
z sen4 ( z)
∫
∫
4
π
2
π
2
dz
π
4
sen4 z
π
2
z dz 3 (1 + cot z) csc zdz
∫ csc=
∫
= 3
4
π
4
π
2
2
2
π
4
π
2
∫ csc z dz + 3∫ (cot z) csc zdz
= 3
2
π
4
=
[−3 cot z]
2
2
π
4
π
2
π
4
π
− cot 3 z π2 =
4
4
Capítulo 1. Integral definida e integral impropia
79
f) Sea
1
∫ (x + 1) ln (x + 1) dx
−2
2
0
=
I
1
x + 1) dx
∫ ln(x+1) ⋅ (
−2
2
0
dv
u
Para calcular esta integral por el método de integración
por partes se selecciona
2x
2
dx
u= ln x + 1 ⇒ du= 2
x +1
1
dv =
(x + 1)−2 dx ⇒ v =−
x +1
(
)
Al reemplazar en la fórmula de integración por partes
se tiene
(
)
1
ln x 2 + 1
−
+
I=
x +1
0
=−
ln2
+
2
∫
∫
2x
1
0
(x + 1) (x2 + 1)
2x
1
0
(x + 1) (x2 + 1)
dx
dx
…(∗)
J
Sea J =
∫
2x
1
0
(x + 1) (x2 + 1)
dx
La descomposición del integrando de J en una suma de
fracciones parciales es
(
)
2
A
Bx + C A x + 1 + ( Bx + C )( x + 1)
=
+
=
(x + 1) x2 + 1
(x + 1) x2 + 1 x + 1 x2 + 1
2x
(
)
(
)
De donde se obtiene
(
)
2=
x A x 2 + 1 + ( Bx + C )( x + 1)
De la igualdad de polinomios se tiene
⇒ A = −1
Si x = −1 ⇒ −2 = 2 A
2
Coeficiente de x : 0 = A + B ⇒ B =1
Coeficiente de x : 2 =B + C ⇒ C =1
Luego, al reemplazar los valores de las constantes A, B y
C en el integrando de la integral J se tiene
J
=
∫
x +1
−1
+ 2
dx
0 x + 1 x + 1
1
1
1
−ln2 π
=−ln x + 1 + ln x 2 + 1 + arctan ( x) =
+
2
2
4
0
80
Cálculo II
Por lo tanto, al sustituir el valor de J en (∗) resulta
ln2 ln2 π π
I=
−
+ −
+ =− ln2
2 2
4 4
4.
En la figura 1.4.4 se muestra la gráfica de una función f y la recta
LT que es tangente a la curva y = f ( x) en el punto A (3; 4) .
Además, la recta LT interseca al eje X en el punto B (7; 0) .
Si g ( x)
=
∫
f ( x)
Y
y
4
t t 3 + 17 dt , halle g′ (3) .
1
A(3;4)
4
Solución
Al aplicar el segundo teorema fundamental del cálculo inte­
gral, la derivada de la función g es
LT
B (7;0)
y= f x
3
0
(
)
x
X
3
=
g′ ( x) f ( x) . 4 [ f ( x)] + 17 . f ′ ( x)
Fig. 1.4.4
Fig. 1.4.4
De donde el valor de la derivada de la función g en x = 3 es
3
=
g′ (3) f (3) . 4 [ f (3)] + 17 . f ′ (3)
…(∗)
Como f ’ (3) es la pendiente de la recta tangente LT y esta
pasa por los puntos A (3; 4) y B (7; 0) , se tiene
4−0
= −1
3−7
f ′ (3) = mT =
Al reemplazar f (3) = 4 y f ′ (3) = −1 en (∗) resulta
g′ (3) =4 4 64 + 17 (−1) =4 (3)(−1) =−12
5.
Determine las ecuaciones de las rectas tangente y normal a la
gráfica de la función
f ( x) x
=
2
∫
x
te t
2
−1
1+ t
x
2
dt + 9π2
x
u
∫ ∫ cos (3πt) dt du
0
0
en el punto de abscisa x = 1.
Solución
El punto de tangencia es P (1; f (1)) , donde
f (1)
=
2
1
te t
−1
1 + t2
∫
=0 + 9π
2
∫
−1
dt + 9π
2
1
u
cos (3πt ) dt du
0 0
∫ ∫
u
1
1
sen (3πt ) du =[−cos (3πu)]0 = 2
0
π
3
0
1
Como f (t ) =
te t
2
−1
es una función
1 + t2
impar, continua en [−1; 1] , entonces
∫
1
=
f (t ) dt
−1
2
1 te t −1
=
0
−1 1 + t 2
∫
Capítulo 1. Integral definida e integral impropia
81
Luego, el punto de tangencia es P (1; 2) .
Por el segundo teorema fundamental del cálculo integral y
la regla de la derivada de un producto se tiene
f ′ ( x) 2 x
=
= 2x
∫
∫
x 2 −1
xe x −1
1 ( − x) e
+ 9π 2
dt
x
1
+
⋅
−
−
(
)
2
−x 1 + t2
1+ x 2 x
x
1
+
x
x
−x
te t
te t
2
2
−1
−1
1+ t
2
2
2
dt +
x 2 e x −1 x3 e x −1
−
+ 9π 2
2 (1 + x) 1 + x 2
x
∫ cos (3πt) dt
0
x
∫ cos (3πt) dt
0
Luego, la pendiente de la recta tangente se obtiene al evaluar
la función f ' en x = 1, es decir
′ (1) 2
=
mT f=
=0 −
2
1
te t
−1
1 + t2
∫
−1
dt +
1 1
− + 9π 2
4 2
1
∫ cos (3πt) dt
0
1
1
1
1
+ 9π2 sen (3πt ) =−
4
4
3π
0
Por lo tanto, las ecuaciones de las rectas tangente y normal
a la gráfica de f en el punto P(1; 2) son
LT : y − 2 =−
6.
1
(x − 1) ;
4
LN : y − 2 =4 ( x − 1)
Dermine si cada una de las siguientes integrales impropias es
convergente o divergente.
a)
0
dx
−∞
1 + 8− x
∫
b)
+∞
xlnx
∫ (1 + x )
2 2
1
dx
c)
∫
3− x dx
+∞
−∞
1 + 3−2 x
Solución
En cada uno de los ejercicios, el integrando es una función con­
tinua en el intervalo de integración. Luego, al usar la definición
correspondiente de integral impropia, se tiene
=
a) I
Nota
Si a > 1,entonces
lim a x = 0
x →−∞
0
0 dx
dx
=
lim =
lim
x
−
a →−∞ a 1 + 8− x
a →−∞
−∞ 1 + 8
∫
∫
∫
0
8x
a
8x + 1
dx
x
0
1 0 8 ln 8 dx
1
ln 8x + 1
lim
= lim =
a
a →−∞ ln 8 a 8x + 1
ln 8 a→−∞
∫
1
1
1
lim ln2 − ln 8a=
ln2)
=
+ 1
=
(
3ln2
3
3ln2 a→−∞
(
)
Por lo tanto, la integral impropia es convergente.
82
Cálculo II
+∞ xlnx
=
dx
1
2 2
1+ x
∫ (
=
b) Sea L
xlnx
b
∫ (1 + x ) dx
lim
)
b →+∞
2 2
1
I
Para determinar la integral I por el método de integra­
ción por partes se selecciona
=
u lnx
x dx
dv =
1 + x2
(
dx
x
⇒
=
du
)
⇒ v=
−
2
(
1
2 1 + x2
)
Luego, al reemplazar en la fórmula de integración por
partes, se tiene
lnx
L=
lim −
b →+∞ 2 1 + x 2
(
b
)
lnx
= lim −
b→+∞ 2 1 + x 2
(
1 b dx
+
2 1 x 1 + x2
1
J
∫ (
)
)
b
b
1
1
+ ln x − ln 1 + x 2
2
2
1
1
Al descomponer el integrando
de J en una suma de fracciones
parciales se obtiene
lnb
1
1
1
2
= lim −
+
−
+
+
ln
b
ln
1
b
ln
2
b →+∞ 2 1 + b 2
2
4
4
(
0+
=
=
(
x 1+ x
)
b
1
lim ln
2 b→+∞ 1 + b2
2
1
x
−
x 1 + x2
=
)
lnb
lim
=
b →+∞ 1 + b 2
1
1
1
lim lnb − ln 1 + b2 + ln2
b
→+∞
2
2
4
(
1
)
1
lim
=
0
2b 2
b →+∞
ln (2) ln (2)
ln2 1
ln (1) +
=
+ =
2
4
4
4
Por consiguiente, la integral impropia es convergente.
+∞ 3− x dx
=
−∞ 1 + 3−2 x
∫
=
c) L
lim
=
a →−∞
0
0
3− x dx
−∞
1 + 3−2 x
∫
3− x dx
∫ 1 + (3 )
a
−x 2
+ lim
b →+∞
+
b
∫
+∞
0
3− x dx
Al hacer el cambio de variable
z = 3− x se tiene
1 + 3−2 x
−dz
dz =
−3− x ln3dx ⇒ 3− x dx =
ln3
3− x dx
∫ 1 + (3 )
0
0
−x 2
Luego
b
1
1
arctan 3− x + lim −
arctan 3− x
= lim −
→+∞
a →−∞ ln3
b
a
ln3
0
( )
( )
1
π
π
−a
−b
lim − + arctan 3 + lim −arctan 3 +
ln3 a→−∞ 4
4
b→+∞
( )
=
=
( )
π
2ln3
3− x dx
∫1+ 3
−2 x
=
1
∫1+ z
2
−dz
ln3
1
=
−
arctan ( z) + k
ln3
1
=
−
arctan 3− x + k
ln3
( )
Por lo tanto, la integral impropia es convergente.
Capítulo 1. Integral definida e integral impropia
83
7.
Determine si cada una de las siguientes integrales impropias es
convergente o divergente.
∫
a)
z = 1− x
5
se tiene
5z 4 dz = −5x 4 dx ⇒ − z 4 dz = x 4 dx
Luego
∫
=
I
5
x9 dx
=
6
1 − x5
(
∫
)
∫(
1 − z5
z6
)
−1
x3 − 2 x 2
6
∫
2
−
π
2
(sen x) ln (sen x + 1) dx
dx
En cada caso, al determinar los puntos de discontinuidad in­
finita de la función integrando en el intervalo de integración y
aplicar la definición correspondiente, se tiene
1
x9 dx
= lim
6
05
b →1−
1 − x5
∫
(
)
∫
x9 dx
b
05
(1 − x5 )
6
b
4
1
1
= lim
+ 5 1 − x5
4
b →1− 5 1 − x5
0
(
1 z4
= +
+k
z 4
(
x2 + 4
a) L
(−z dz=
)
)
1
=
+ 5 1 − x5
5
5
4
1− x
1
4
= − z −2 + z3 dz
1
(
1 − x5
b)
Solución
Al hacer el cambio de variable
5
0 5
∫
c)
x9 dx
1
)
4
)
1
1
= lim
+ 5 1 − b5
5
−
5
4
b →1 1 − b
(
+k
)
4
1
− 1 + = +∞
4
Por consiguiente, la integral impropia es divergente.
b) L
=
=
∫
0
−
π
2
lim
(sen x) ln(sen x + 1) dx
0
π
a → −
2
+
(sen x) ln (sen x + 1) dx
∫
…(∗)
a
J
Para determinar la integral J por el método de integra­
ción por partes se selecciona
cosx dx
du
=
=
u ln (sen x + 1) ⇒
1 + sen x
dv =sen x dx ⇒ v =−cosx
Luego, por la fórmula de integración por partes, resulta
=
J
0
∫ (sen x) ln (1 + sen x) dx
a
0
=
[− (cos x) ln (1 + sen x)]a +
84
Cálculo II
∫
0 cos 2 x dx
a
1 + sen x
0
(cos a) ln (1 + sena) + ∫a (1 − sen x) dx
=
J
=
(cos a) ln (1 + sena) + [x + cosx]0a
=
(cos a) ln (1 + sena) + 1 − a − cos a
lim cos aln (1 + sena)
=
M
π
a → −
2
=
lim
π
a → −
2
=1 +
lim
π
a → −
2
Así, al reemplazar J en (∗) se tiene
=
L
+
[(cos a) ln (1 + sena) + 1 − a − cos a]
+
=
lim
π
a → −
2
+
+
ln (1 + sena) ∞
sec a
∞
cos3 a
sena (1 + sena)
(1 − sena) cos a
π
2+π = =
lim
0
+ lim (cos a) ln (1 + sena) =
+
sena
π
+
2
2
a
→
−
π
a → −
2
2
Por consiguiente, la integral impropia es convergente.
1
x2 + 4
=
dx
−1 x3 − 2 x 2
∫
=
c) L
=
1
x2 + 4
−1
x 2 ( x − 2)
∫
0
x2 + 4
1
x2 + 4
−1
2
0
2
dx
Al descomponer
dx +
dx
∫
∫
x ( x − 2)
x ( x − 2)
L1
=
L1 lim
∫
b
b →0− −1
x2 + 4
x ( x − 2)
2
L2
2
x +4
= lim
x ( x − 2) b→0−
2
2
1 2
− − 2+
dx
−1 x
x − 2
x
∫
b
b
2
= lim −ln x + + 2ln x − 2
−
x
−1
b→0
x 2 ( x − 2)
=
−
1 2
2
−
+
x x2 x − 2
b → 0−
−b ln b + 2
= lim
+ 2ln2 + 2 − 2ln (3) = −∞
b
b → 0−
0+ 2
−
0
= − lim
b →0
−
ln (−b) − ∞
1
−∞
b
1
= − lim b
b →0− −1
′H
L
b2
=
− lim (−b) =
0
Por lo tanto, como L1 es divergente, la integral impropia
L diverge.
8.
x2 + 4
=
N lim (−bln b )
2
= lim −ln b + + 2ln b − 2 + 2 − 2ln (3)
−
b
b→0
en una suma de fracciones par­
ciales, se obtiene
b → 0−
Para s > 0 pruebe que
∫
+∞
2
0
s3
e − st t 2 dt =
Solución
=
Sea F (s)
∫
+∞
=
e − st t 2 dt
0
lim
∫
b
e − st t 2 dt
b →+∞
0
… (∗)
I
Capítulo 1. Integral definida e integral impropia
85
Para determinar la integral I por el método de integración
por partes se selecciona
2
u t=
⇒ du 2t dt
=
1
− e − st
e − st dt ⇒ v =
dv =
s
Al reemplazar en la fórmula de integración por partes, se
obtiene
b
t 2 − st
2
I=
t e dt =
− e +
0
s
0 s
∫
= −
b
2 − st
∫
b
0
te − st dt
b2 − sb 2 b − st
e +
te dt ... (∗∗)
s
s 0
∫
J
De manera similar, para determinar J se selecciona
=
⇒=
du dt
u t
1
e − st dt ⇒ v =
− e − st
dv =
s
Así,
Si s > 0, se tiene
lim
b
′H
2 L
b →+∞ e sb
= lim
b →+∞
2b
′H
L
=
2
s2
lim
1
b → +∞ e sb
∫
se sb
2
b
= lim sb
s b→+∞ e
=0
b
b
t − st 1
J=
te − st dt =
− s e + s
0
0
e − st dt
(
)
Luego, al reemplazar (∗ ∗ ∗) en (∗∗) y este resultado en (∗),
se obtiene
b2
2be − sb 2e − sb 2
− 3 + 3
F (s) = lim − e − sb −
b →+∞
s2
s
s
s
Por lo tanto,
∫
+∞
2
0
s3
=
e − st t 2 dt
Cálculo II
0
b
b
1
b
1
= − e − sb − 2 e − st = − e − sb − 2 e − sb − 1 … (∗ ∗ ∗)
0
s
s
s
s
2
2
=−0 − 0 − 0 + 3 = 3 ,
s
s
86
∫
b
, para s > 0
para s > 0
Ejercicios y problemas propuestos 1.4
1.
3.
La gráfica de la función f está formada por
segmentos de recta y semicircunferencias, tal
como se muestra en la figura 1.4.5. Use fór­
mulas de áreas elementales para calcular ca­
da una de las siguientes integrales definidas.
a)
∫
2
∫
10
−8
c)
f ( x) dx
−8
∫
b)
10
−8
En la figura 1.4.7 se muestra la gráfica de
una función f cuya derivada es continua en
[a; b]. Si el área de la región D es 3u2 , utili­
ce el método de integración por partes para
calcular
b
∫ xf ′ (x) dx
a
YY
f ( x) dx
f ( x) dx
yy==f f(x)
(x)
D
D
Y
00
a
a
2
–8
–4
–2
0
Fig. 1.4.7
3
–2
5 6
8
10
X
4.
Fig. 1.4.5
2.
En la figura 1.4.6 se muestra la gráfica de
una función f, continua en [−5; 12] y las regiones D1 , D2 , D3 y D4 . Si A ( D1 ) = 3u2 y
A ( D4 ) = 5u2 ,
∫
12
∫
5.
8
−5
–5
−5 D
D1
f ( x) dx
88
−x
g (t ) dt
∫
1
−1
x f ' ( x) dx
Calcule cada una de las siguientes integrales
definidas
a)
ff
D33
D
x
b) Calcule
6.
00
∫
a) Determine si f es una función par o impar.
YY
D
D22
3
Si g es una función continua en y
f ( x) =
−5
∫
3
∫−3 [x + f (x)][x − g (x)] dx + 2∫ 0 x g (x) dx
12
Calcule el área de la región D2 y
Sean f y g funciones continuas en el inter­
valo [−3; 3] , tales que f es par y g es impar.
Calcule el valor de A, donde
A=
=
f ( x) dx 6=
y
f ( x) dx 18.
−5
bb XX
D
D44 X
X
12
1
2
∫
3
2lnx + 4
1
x ln2 x + 2lnx + 1
6
π
dx
2
sen
x dx
1
x 2 cos
x
b)
∫
c)
∫ (x + 1) arctan x dx
Fig. 1.4.6
4
π
3
1
2x arctan x + 1
2
Capítulo 1. Integral definida e integral impropia
87
d)
e)
f)
g)
h)
i)
j)
∫
(
) dx
1
xln x 2 + 1
0
x2 + 1
π
4
sen5 (2x)
π
6
1 + cos2 (2x)
∫
∫
31
∫
2
(
5
)
x + 1 ln 5 x + 1 dx
0
1
x4 + 1
3
2x + x
3π
( ) dx
sec 2 ( x3 )
0
∫
1
ln3
2
0
∫
π
2
0
e)
∫
3
0 e 3x
−1
∫
−1
x
∫
2
e2x
4e −2 x − 1
0
−∞
i)
dx
2
∫
g)
x 2 sen2 x3
∫
4
dx
1 + 2x
dx
x
4
c)
−1
1
2
dx
x −1
dx
−2
arctan x
d)
∫
f)
∫ (x + 4)
h)
−∞
(x + 1)2
dx
+∞
−∞
∫
+∞
0
dx
2
1
2
x ( x + 1)
dx
( )
2x3ln x 2 dx
10. Halle la transformada de Laplace de las si­
guientes funciones
a) f (t ) = 2t
dx
b) f (t )= t + 4
0 , 0 ≤ t < 1
c) f (t ) =
t ≥1
1,
e x (sen x + cos x) dx
d) f (t ) = t 3t
7.
Halle la ecuación de la recta tangente a la
gráfica de la función
f ( x) = 3x 2 +
8.
∫
x +1
− x −1
3
t t 4 − 8 dt +
∫
2x
3
x3 + 1
t t 4 − 8 dt
a) f ( x=
) 2 e −2 x , =I
[0; +∞
b) f ( x=
) 2− x ln2, =I
[0; +∞
Halle la ecuación de la recta normal a la grá­
fica de la función
c) f ( x)
=
1
=
, I
b−a
[a; b] ,
∫
cos3 x + e − x
−2
2
(2 − 5t) dt + ∫
3 x 2 −1
( )
sen πt 2 dt
1
x −1
en el punto de abscisa x = 0 .
Determine si cada una de las siguientes in­
tegrales impropias es convergente o diver­
gente. Si son convergentes indique el valor
al cual convergen.
a)
88
densidad de probabilidad en el intervalo I.
en el punto de abscisa x = 1.
=
f ( x)
9.
11. Verifique si las siguientes son funciones de
Cálculo II
∫
0
−2
ex
1 − e2x
dx
b)
∫
+∞
−1
x −1/ 2
1+ e
x
dx
a<b
12. Sea f una función cuya derivada es continua
en el intervalo [1; +∞ . Si f (1) = 2 y la recta
L : y = 4 es una asíntota horizontal a la de­
recha de la gráfica de f, calcule
∫
+∞
1
( )
x f ' x 2 dx
Capítulo
2
Aplicaciones de la
integral definida
En este capítulo se desarrollan las aplicaciones de la integral definida y la integral
impropia en el cálculo del área de una región plana, del volumen de un sólido de
revolución y de la longitud de arco de una
curva. También se desarrollan aplicaciones
a la determinación de una magnitud variable, cuando se conoce su razón de cambio.
Sabes
Capacidades necesarias:
ü Graficar funciones.
ü Determinar la derivada de una función e interpretarla como una razón
de cambio.
ü Calcular la integral definida de una
función.
ü Establecer la convergencia de una
Conocimientos previos
Gráficas de funciones algebraicas y
trascendentes.
Derivada de una función y su interpretación como razón de cambio.
Integral definida e integral impropia.
integral impropia.
Piensas
Habilidades por desarrollar:
ü Graficar regiones planas limitadas
por curvas.
ü Calcular el área de una región plana.
ü Calcular el volumen de un sólido de
revolución y la longitud de una curva.
ü Hallar una magnitud variable cuando
se conoce su razón de cambio.
Secciones
2.1 Área de una región plana
2.2 Volumen de un sólido de revolución
2.3 Longitud de arco
2.4 Revisión del capítulo
Haces
Competencias por alcanzar:
ü Resolver ejercicios y problemas que
involucren calcular áreas, volúmenes
y longitud de una curva.
Se ha comprobado a lo largo de la historia de la ciencia que la matemática ha
permitido explorar y conocer las estructuras del universo. En particular, mediante la geometría elemental o analítica, es posible describir las formas de
algunos objetos y calcular sus magnitudes. Grandes matemáticos nos han legado fórmulas para el cálculo de áreas de regiones planas de forma poligonal
o circular y para el cálculo del volumen de un sólido que tiene la forma de un
poliedro, un cilindro, un cono o una esfera.
Estos aportes de la matemática fueron fundamentales para el conocimiento
del mundo que nos rodea y resolvieron innumerables problemas. Sin embargo,
el desarrollo de la ciencia ha presentado nuevas interrogantes derivadas de problemas de mayor complejidad como, por ejemplo:
• ¿Cómo calcular el área de una región plana limitada por curvas?
• ¿Cómo calcular el volumen de un sólido de revolución?
• ¿Cómo calcular la longitud de arco de una curva?
La solución a estos problemas requería de una nueva herramienta, la cual,
luego de muchos años de investigación y de las aportaciones de muchos matemáticos, fue descubierta casi simultáneamente por Isaac Newton y Gottfried
Leibniz en el siglo XVII. Este método se denomina cálculo integral, y dio respuesta a dichas interrogantes, como se verá en este capítulo.
El conocimiento del cálculo integral fue un gran salto en el desarrollo de la
matemática pero, sobre todo, permitió avances significativos en otras áreas del
conocimiento. Por ejemplo, en la física, la química, la economía o la estadística, el
cálculo integral es fundamental para justificar sus principales leyes y postulados.
Área de una ventana
Capacidad de una
Capacidad
de una
copa de vino
copa de vino
Capacidadde
deuna
una
Capacidad
barrica
de
vino
barrica de vino
Fig. 2.1
Fig. 2.2
Fig. 2.3
Área de
una ventana
90
Cálculo II
2.1 Área de una región plana
El propósito de esta sección es calcular el área de una región plana
limitada por curvas mediante el uso de integrales definidas o impropias.
Sea D una región del plano limitada por las rectas x = a, x = b y las
gráficas de las funciones continuas f y g, tales que 0 ≤ g ( x) ≤ f ( x) ,
para cada x ∈ [a; b] , como se muestra en la figura 2.1.1.
Y
y = f (x)
D
y = g (x)
0
a
X
b
Fig. 2.1.1
El área A(D) de la región D es igual al área A ( D1 ) de la región
D1 menos el área A ( D2 ) de la región D2 , donde D1 es la región
del plano limitada por el eje X, la gráfica de la función f y las rectas
x = a y x = b; y D2 es la región del plano limitada por el eje X, la
gráfica de la función g, y las rectas x = a y x = b, como se muestra
en la figura 2.1.2.
Y
Y
y = f (x)
D1
y = g (x)
D2
0
a
b
X
0
a
b
X
Fig. 2.1.2
Esto es
=
A ( D) A ( D1 ) − A ( D2 )……….. (1)
Como f y g son funciones continuas no negativas en el intervalo
[a; b] , se tiene
=
A ( D1 )
∫
b
a
f ( x) dx y=
A ( D2 )
b
∫ g (x) dx………(2)
a
Capítulo 2. Aplicaciones de la integral definida
91
Al reemplazar (2) en (1), resulta
∫
b
A ( D) = f ( x) dx −
a
∫
b
a
b
∫ [ f (x) − g (x)] dx
g ( x) dx =
a
Por lo tanto, el área de la región D está dada por
b
∫ [ f (x) − g (x)] dx
=
A ( D)
a
Observación 1
La fórmula anterior se mantiene invariante cualquiera que sea la
ubicación de las curvas con respecto al eje X. Así, se tiene
a) Sea D la región del plano limitada por las rectas x = a, x = b
y las gráficas de las funciones continuas y no positivas f y g,
tales que g ( x) ≤ f ( x) , para cada x ∈ [a; b] (figura 2.1.3).
Y
YY
0
0
a
bb
a
D1
a
b
X
X
X
y = f(x)
D
y = g(x)
y = g (x)
Fig. 2.1.3
Y
Y
0
a
a
D2
b
b
X
X
y = f (x)
El área A ( D) de la región D es igual al área A ( D1 ) de la
región D1 menos el área A ( D2 ) de la región D2 , donde D1
es la región del plano limitada por el eje X, la gráfica de la
función f y las rectas x = a y x = b, y D2 es la región del plano limitada por el eje X, la gráfica de la función g, y las rectas
x = a y x = b, tal como se muestra en la figura 2.1.4.
A ( D) A ( D1 ) − A ( D2 )………(3)
Es decir, =
Fig. 2.1.4
Como
∫
b
∫
b
A ( D1 ) =
− g ( x) dx y A ( D2 ) =
− f ( x) dx ….. (4)
a
a
al reemplazar (4) en (3) resulta
A ( D) =−
=
92
Cálculo II
b
∫
b
g ( x) dx − −
a
∫ [ f (x) − g (x)] dx
a
∫
b
a
f ( x) dx
b) Sea D la región del plano limitada por las rectas x = a, x = b
y las gráficas de las funciones f y g continuas en el intervalo
[a; b] , donde f es no negativa y g es no positiva, tal como se
muestra en la figura 2.1.5.
YY
0
y = f (x)
a
b
X
X
y = g (x)
Nota
En los casos analizados a) y b) se
observa que el área de la región D
es igual a la integral, desde a hasta
b, de la ordenada de la curva que
está arriba ( y = f ( x)) menos la ordenada de la curva que está debajo
( y = g (x)) . Esto es independiente
de las posiciones de las gráficas con
respecto al eje X.
Fig. 2.1.5
Fig. 2.1.5
Luego, el área de la región D es
=
A ( D)
b
b
b
) dx ∫ [ f (x) − g (x)] dx
∫ f (x) dx + −∫ g (x=
a
a
a
c) Sea D la región del plano limitada por las rectas y = c , y = d
y las gráficas de las ecuaciones x = f ( y) y x = g ( y) , donde
f y g son funciones continuas en el intervalo [c ; d] , tales que
g ( y) ≤ f ( y) , para todo y ∈ [c ; d] , como se muestra en la figura 2.1.6.
YY
d
D
x = g ( y)
x = f ( y)
c
0
Fig. 2.1.6
Fig. 2.1.6
X
X
Nota
En la fórmula dada se observa que
el área de la región D es igual a
la integral, desde c hasta d, de la
abscisa de la curva que está a la
derecha (x = f(y)) menos la abscisa
de la curva que está a la izquierda
(x = g(y)). Esto es independiente de
las posiciones de las gráficas de las
funciones con respecto al eje Y .
Al proceder de manera similar que en los casos anteriores,
se tiene que el área de la región D está dada por
=
A ( D)
d
∫ [ f (y) − g (y)] dy
c
Capítulo 2. Aplicaciones de la integral definida
93
Ejemplo 1
Calcule el área de la región D limitada por las gráficas de
f ( x) = x 4 y g ( x) = 8x.
Solución
En la figura 2.1.7 se muestra la región D del plano limitada por
las gráficas de f ( x) = x 4 y g ( x) = 8x . Para determinar los límites
de integración se hallan los puntos de intersección de las gráficas
de las curvas y = x 4 e y = 8x, mediante la solución del sistema
de ecuaciones
y = x 4
y = 8x
Esto es,
(
)
x 4 = 8x ⇔ x ( x − 2) x 2 + 2 x + 4 = 0
⇔x= 0 ∨ x= 2
Luego, los puntos de intersección son (0; 0) y (2; 16) .
En la figura 2.1.7 se observa que el área de la región D se puede calcular utilizando los límites de integración con respecto a la
variable x o con respecto a la variable y. Así, se tiene
i) Al considerar los límites de integración para la variable x, la
región D está limitada por las curvas y = x 4 y y = 8x y su
área está dada por
Y
16
A ( D) =
y = 8x
0
2
x5
48
8x − x dx = 4 x 2 − =
5 0 5
4
Por consiguiente, el área de la región D es 48/ 5 u2.
D
ii) Al considerar los límites de integración para la variable y, la
y
región D está limitada por las curvas x = 4 y y x = y su
8
área está dada por
y = x4
0
∫
2
2
X
A ( D) =
Fig. 2.1.7
∫
y
y − 8 dy =
16
0
4
16
4 5/ 4 y 2
48
y − =
16 0
5
5
Por lo tanto, el área de la región D es 48/ 5 u2.
Ejemplo 2
Calcule el área de la región D limitada por las gráficas de
y = sen (2x) e y = cos (2x) en el intervalo [p 8 ; 9p 8] .
Solución
La región D se muestra en la figura 2.1.8. En este caso no se
puede calcular el área de la región D con una sola integral definida
94
Cálculo II
pues en el intervalo [p 8 ; 5p 8] se tiene sen (2x) ≥ cos (2x) , mientras que en el intervalo [5p 8 ; 9p 8] . se tiene cos (2x) ≥ sen (2x) .
Luego, el área de la región D es la suma de dos integrales, es decir
∫
A ( D)=
5p
8
p
8
[sen (2x) − cos (2x)] dx +
∫
9p
8
5p
8
[cos (2x) − sen (2x)] dx
5p
9p
8
8
cos (2 x) sen (2 x) 8 sen (2 x) cos (2 x) 8
2 2
=
−
+
+
=
− 2
2 p 2
2 5p
Fig. 2.1.8
2
Por lo tanto, el área de la región D es 2 2 u .
Ejemplo 3
Calcule el área de la región D del plano limitada por la parábola
x= 1 +
y2
y la recta =
y 2x − 6.
4
Solución
Los puntos de intersección de la parábola y la recta se obtienen al
resolver el sistema de ecuaciones
y2
x = 1 +
4
y
6
+
x =
2
x= 1 +
y2
4
x=
y+6
2
Esto es,
1+
y2 y + 6
=
⇒ y 2 − 2 y − 8 =0 ⇒ ( y =−2 ∨ y =4)
4
2
Fig. 2.1.9
Así, los puntos de intersección de las curvas son: A (2; −2) y
B (5; 4) . La región D se muestra en la figura 2.1.9.
Al considerar los límites de integración sobre el eje Y, el área
de la región D está dada por
=
A ( D)
∫
4
y2 y
y3 y 2
+ + 2 dy =− +
+ 2 y =9
−
4 2
12 4
−2
−2
∫
=
y + 6 y 2
− 1 + 4 dy
2
4
−2
4
Por consiguiente, el área de la región D es 9u2 .
Capítulo 2. Aplicaciones de la integral definida
95
Ejercicios y problemas resueltos 2.1
1.
En cada uno de los siguientes ejercicios dibuje la región plana
limitada por las gráficas de las ecuaciones dadas y calcule su
área.
a) y= 4 − x 2 , y= x + 2
b) y =− − x , y =− x − 6, y = 0
c) y =
x + 4, y =
1 − x + 1, x − 5y + 4 = 0
d) y =
2 x3 + 12 x 2 , y =
8x + 48
e) y =
2
1 + x2
, y = x, y = −x
1
f) y =
ln ( x − 2) , y =
ln
e2 2
, x =+
x
−
2
g) y = 3 tan x , y = −3 tan x , y = 2 cos x , − p/ 6 ≤ x ≤ p/ 6
h) y =
2 + e−x , y =
2 + ex , x =
−2 ln3
Solución
a) La región D limitada por las gráficas de las ecuaciones
y= 4 − x 2 ; y= x + 2, se muestra en la figura 2.1.10.
YY
y= x+2
D
0
−2
XX
1
y = 4 − x2
Fig. 2.1.10
Fig. 2.1.10
Al considerar los límites de integración sobre el eje X, el
área de la región D está dada por
A ( D=
)
1
∫ (
)
4 − x 2 − ( x + 2) dx
=
−2
1
∫ (2 − x − x) dx
2
−2
2 1
x3 x
9
= 2 x −
− =
3
2
−2 2
Por lo tanto, el área de la región D es
96
Cálculo II
9 2
u .
2
b) En la figura 2.1.11, se muestra la región D limitada por las
gráficas de las ecuaciones y =− − x , y =− x − 6, y =0
6
𝐴𝐴(−6; 0)
Y
4
D1
0
D2
B
𝐵𝐵(−4; −2)
X
yy
=− x− x , y =− x − 6, y =0
D D1 D2
6
y x 6
Fig. 2.1.11
Fig. 2.1.11
Se observa que la región D está limitada superiormente
por el eje X e inferiormente por el segmento de recta AB
para
para −6 ≤ x ≤ −4 y por el arco de parábola OB
−4 ≤ x ≤ 0.
Así, al considerar los límites de integración sobre el eje X,
el área de la región D está dada por
=
A ( D) A ( D1 ) + A ( D2 )
=
=
−4
0
∫ −6 (0 − (−x − 6)) dx + ∫− 4 (0 − (−
−4
0
∫ −6 (x + 6) dx + ∫− 4
−4
))
− x dx
− x dx
0
3
x2
2
22
= + 6 x − (− x) 2 =
2
3
− 4 3
− 6
Luego, el área de la región D es 22/ 3 u2.
D
Otra forma de calcular el área de la región D es elegir los límites de integración sobre el eje Y (figura 2.1.12).
Así, se tiene
A ( D) =
∫
0
−2
yY
–6
−6
0
x
X
−–2
2
2
–y 2
xx==− y
0
y3 y 2
− y − (− y − 6) dy = − +
+ 6 y
2
3
−2
2
−8
22
= 0 − − + 2 − 12 =
3
3
Por consiguiente, el área de la región D es
Fig.2.1.12
2.1.12
Fig.
xx == –y
− y –6
−6
22 2
u .
3
Capítulo 2. Aplicaciones de la integral definida
97
c) La región D, limitada por las gráficas de las ecuaciones
=
y
x + 4, y =
figura 2.1.13.
1 − x + 1, x − 5y + 4 =
0, se muestra en la
Y
y=
=
y
1− x +1
D2
D1
0
–4
D = D1 D2
x+4
y=
1
x+4
5
X
Fig. 2.1.13
Al elegir los límites de integración sobre el eje X, el área
de la región D es igual a la suma de las áreas de las regiones
D1 y D2 , esto es
0
x + 4
x + 4
1
x+4 −
dx + ∫ 1 − x + 1 −
dx
∫
5
5
A
=
( D)
−4
0
A( D1 )
A( D2 )
2 0
1
2
(x + 4) 2
(x + 4)2
3/ 2
3/ 2
= ( x + 4) −
+ − (1 − x) + x −
3
10
3
10
−4
0
=
9
2
Por lo tanto, el área de la región D es
9 2
u .
2
d) Para graficar la ecuación =
y f (=
x) 2 x3 + 12 x 2 se determinan los intervalos de crecimiento y decrecimiento de f mediante el análisis de los signos de su derivada. Así, se tiene
f ′ ( x) =
6 x 2 + 24 x =
6 x ( x + 4) =⇒
0 (x =
0 ∨ x=
−4)
de donde los números críticos de f son x = 0 y x = − 4. El
diagrama de signos de f ′ ( x) se muestra en la figura 2.1.14.
–4
0
Fig. 2.1.14
98
Cálculo II
Luego, en x = − 4 hay un máximo relativo de f cuyo valor
64 y en x = 0 hay un mínimo relativo cuyo valor
es f (− 4) =
es f (0) = 0.
La gráfica de la región D, limitada por las gráficas de
y 2x3 + 12x 2 , =
las ecuaciones =
y 8x + 48, se muestra en
la figura 2.1.15.
Y
3
=
y 8x + 48,
2
=
y 2x + 12x ,
D1
Los puntos de intersección A, B y C
entre las dos curvas se obtienen al
resolver el sistema de ecuaciones
y 2x3 + 12x 2
=
y 8x + 48
=
B
D = D1 D2
⇔ 2x3 + 12x 2 =8x + 48
D2
⇔ ( x + 6)( x + 2)( x − 2) =
0
Así, los puntos de intersección son
A
–6
0
–2
A (−6; 0) , B (−2; 32) y C (2; 64)
X
Fig. 2.1.15
Dado que la región D es la unión de las regiones D1
y D2 , el área de la región D está dada por
=
A ( D) A ( D1 ) + A ( D2 )
donde
A=
(D1 )
−2
∫ (2x
−6
3
)
+ 12x 2 − (8x + 48) dx
−2
x4
= + 4x3 − 4x 2 − 48x = 128
2
− 6
A ( D=
2)
∫
2
−2
(
)
(8x + 48) − 2 x3 + 12x 2 dx
2
x4
3
2
128
=
− − 4 x + 4x + 48x =
2
−2
Por lo tanto, el área de la región D es 256u2 .
e) La asíntota horizontal de la gráfica de
=
y f=
( x)
es la recta L : y = 0, pues lim
2
x →±∞ 1 +
x2
2
1 + x2
=0
f ( x)) , su
Además, como f es una función par ( f (− x) =
gráfica es simétrica con respecto al eje de ordenadas y pasa
por el punto de máximo absoluto A (0; 2) .
Capítulo 2. Aplicaciones de la integral definida
99
En la figura 2.1.16 se muestra la región D limitada por las
gráficas de las ecuaciones
Y
y = –x
y=x
y=
D1
–1
D2
0
D = D1 D2
1
X
2
, y = x, y = −x
1 + x2
Luego, el área de la región D está dada por
A ( D) = A ( D1 ) + A ( D2 ) = 2 A ( D2 )
= 2
Fig. 2.1.16
∫
(por simetría)
1
x2
2
2
−
x
=
dx
arctan
x
−
(
)
0 1 + x2
2 0
1
2
1
= 2 2 arctan (1) − − 0 = p − 1
2
Por consiguiente, el área de la región D es (p − 1) u2.
f) En la figura 2.1.17 se muestra la región D limitada por las
gráficas de las ecuaciones
1
y=
ln ( x − 2) , y =
ln
e2 2
, x =+
x
−
2
Y
y
yy=ln
ln((xx −
22)) ⇔ x = e + 2
2
=
x ee2 y2
+2
D
0
X
2
yy=
−lnln
( x(x2−) 2)
x2
Fig. 2.1.16
Fig. 2.1.17
Al elegir los límites de integración sobre el eje Y , el área
de la región D, está dada por
A=
( D) 2
∫ (e + 2) − (e
2
2
0
y
)
+ 2 dy
2
= 2 e 2 y − e y = 2( e 2 + 1)
0
Por lo tanto, el área de la región D es 2( e 2 + 1)u2.
100
Cálculo II
g) En la figura 2.1.18 se muestra la región D limitada por las
gráficas de las ecuaciones
y=
3 tan x , y =−3 tan x , y =2 cos x , −
p
p
≤x≤
6
6
El punto de intersección A se
obtiene al resolver el sistema de
ecuaciones
y = 2 cos x
y = −3 tan x
Y
⇔ 2cos x =
−3 tan x,
y = –3tanx
y = 3tanx
⇔ 2cos2 x =
−3 sen x
⇔ 2sen2 x − 3 sen x − 2 =
0
D1 D 2
⇔ (2 sen x + 1)(sen x − 2) =
0
y = 2cosx
≠0
p
1
p1
senxx=
=
−
⇔ sen x =
−⇔ ⇔
−− ⇔0x =
6
2
62
X
Fig. 2.1.18
Luego, al elegir los límites de integración sobre el eje X,
el área de la región D está dada por
A ( D) = A ( D1 ) + A ( D2 ) = 2 A ( D2 ) (por simetría)
= 2
∫
p
6
0
1
p
⇔ sen x =
− ⇔x=
−
2
6
p
6
De forma análoga, el punto de intersección B se obtiene al resolver
y = 2 cos x
y = 3 tan x
cuya solución es el punto
p
B ; 3
6
(2 cos x − 3 tan x) dx
= 2 [2 sen x + 3 ln cosx
3
= 2 + 6ln
2
3
Luego, A − ;
p
]06
3
Por lo tanto, el área de la región D es 2 + 6ln u2
2
Y
y = 2 + ex
h) La región D limitada por y= 2 + e − x , y= 2 + e x y x = −2 ln 3
se muestra en la figura 2.1.19.
Luego, el área de la región D está dada por
A=
( D)
∫
0
(
) (
)
0
−e − x − e x
=
–2ln3
(
D
2 + e − x − 2 + e x dx
−2 ln3
64
= (−1 − 1) − −e –2ln3 − e –2ln3 =
9
y=2
)
64 2
u .
Por lo tanto, el área de la región D es
9
y = 2 + e –x
0
X
x = –2ln3
Fig. 2.1.19
a
loga N
=N
e x lna = a x
Capítulo 2. Aplicaciones de la integral definida
101
2.
Calcule el área de la región infinita limitada por las gráficas
de las ecuaciones
4
=
y
2
x +3
=
, y 0=
, x
3, x ≥ 3
Solución
La asíntota horizontal de la gráfica de la función
=
y f=
( x)
4
2
x +3
es la recta L : y = 0, pues lim
x →±∞
4
2
x +3
=0
Además, f es una función par ( f ( x=
) f (− x)) , por lo que su
gráfica es simétrica con respecto al eje de ordenadas.
La región D del plano, limitada por las gráficas de las ecuaciones dadas, se muestra en la figura 2.1.20.
Y
=
y
4
2
x +3
=
, y 0=
, x
3, x ≥ 3
D
04 =
=
y
, y 0=
, x
x2 + 3
3, x ≥ 3
X
Fig. 2.1.20
Luego, el área de la región infinita D está dada por la siguiente integral impropia
+∞
4
=
dx lim 4
2
b→+∞
3 x +3
∫
b
1
x
= 4 lim arctan
b →+∞ 3
3
b
=
A ( D)
∫
dx
3
x2 +
( 3)
2
3
1
b 1
arctan (1)
= 4 lim arctan −
b →+∞ 3
3
3
1 p 1
= 4
−
3
32
p p 3
=
4
3
Por lo tanto, el área de la región D es
102
Cálculo II
p 3 2
u .
3
3.
Calcule el área de la región infinita limitada por las gráficas de
las ecuaciones
=
y
x
3
2
x −1
=
, x 1=
, x
2=
, y 0
⇒ f ′ ( x) =
Solución
La recta L : x = 1 es una asíntota vertical de la gráfica de la función
y=
x3
x2 − 1
x3
, pues lim
x2 − 1
x →1+
=
y f=
( x)
x3
x2 − 1
(
)
x2 2x2 − 3
(x2 − 1)
3/ 2
Diagrama de signos de f ′ ( x)
= +∞.
Del diagrama de signos de f ′ ( x) se observa que la función
f tiene un mínimo relativo en x = 3/ 2 .
−
3
2
–1
1
3
2
En la figura 2.1.21, se muestra la región infinita D del plano,
limitada por las gráficas de las ecuaciones
=
y
x3
x2 − 1
=
, x 1=
, x
2 , e=
y 0
Y
y=
x3
x2 − 1
D
0
1
2
X
Fig. 2.1.21
Luego, el área de la región infinita D se calcula con la siguiente integral impropia
=
A ( D)
2
x3
=
dx lim
1
a →1+
x2 − 1
∫
∫
2
a
x2 .
x
x2 − 1
dx
x 2 − 1 se tiene
u
Al utilizar la sustitución=
x = a ⇒ u = a2 − 1
x2 =
u2 + 1, udu =
xdx ,
x = 2 ⇒ u = 1
Luego,
A ( D=
) lim
a →1+
∫
1
a2 −1
1
u3
= lim + u
u + 1 du
+
a →1 3
(
2
)
a2 −1
Capítulo 2. Aplicaciones de la integral definida
103
3/ 2
4 1
4
A (=
D) lim − a2 − 1
1
− a2 −=
+ 3
3
a →1
3
(
)
Por consiguiente, el área de la región D es 4/ 3 u2 .
4.
Determine el valor de k para que el área de la región infinita
limitada por las gráficas de las ecuaciones
=
y
1
3
x−2
,=
y 0,=
x 2,=
x k, k > 2
sea igual a 3/ 2 u2 .
Solución
La región infinita D, limitada por las gráficas de las ecuaciones
dadas, se muestra en la figura 2.1.22.
Y
=
y
D
1
3
x−2
0
x=2
x=k
,=
y 0,=
x 2,=
x k, k > 2
X
Fig. 2.1.22
El área de la región infinita D está dada por
A ( D) =
∫
k
dx
2 3
x−2
a→2
k
(x − 2)−1/ 3 dx =
+ ∫a
= lim
3
3
2/3
2/3
2/3
3
= lim ( k − 2) − (a − 2) = ( k − 2)
+ 2
2
2
a→2
Dado que el área de la región D es 3/ 2 u2 , se tiene
3
3
(k − 2)2/ 3 = ⇒ k = 3
2
2
Por lo tanto, el valor de k es 3.
104
Cálculo II
k
2/3
3
lim ( x − 2)
a → 2+ 2
a
5.
Demuestre que el área de la región limitada por la elipse
2
2
ε :x2 + y2
a
b
=
1
es pabu2.
Solución
La región D limitada por la elipse se muestra en la figura 2.1.23
YY
bb
y =y
=
b b 22 22
aa −−xx
aa
D
−–aa
−–bb
aa
X
X
b
y = − b a22 − x22
y=
−a a − x
a
Fig. 2.1.22
Fig. 2.1.23
El área de la región D está dada por
A ( D)
=
=
=
b 2
b 2
a − x2 − −
a − x 2 dx
−a a
a
∫
a
2b
a
∫
a
−a
− x2 dx
=
a2
función par
4b
a
∫
a
0
a2 − x 2 dx
a
4b 1
x
2
2
2
x a − x + a arcsen
a 2
a 0
2b
a (0) + a2 arcsen (1) − 0 + a2 arcsen (0)
a
0
p/ 2
= pab
=
Por consiguiente, el área de la región limitada por la elipse
es pabu2.
Capítulo 2. Aplicaciones de la integral definida
105
Ejercicios y problemas propuestos 2.1
1.
2.
En cada uno de los siguientes ejercicios dibuje la región limitada por las gráficas de las
ecuaciones dadas y calcule su área.
En cada uno de los siguientes ejercicios dibuje la región infinita limitada por las gráficas
de las ecuaciones dadas y calcule su área.
a) y =4e 2 x + 2, y =2, x =0
b)=
y
2
0, y=
−3x
a) y − 4 y + 2x =
8
8
e) y =
2+ 4
, y=
2− 4
,
x −1
x −1
e) y= 3 − cos (4x) , y = 1 + cos (4x) ,
p
p
≤x≤ .
2
2
=
x 1=
, x 2
p
p
3 + 2cos x , y =
3 − 2sen x ,
f) y =
2
2
para −1/ 2 ≤ x ≤ 7 / 2.
g) y= 3 − 3e
x4 +
h) y =
, y= 3 − 3e
f) y = xe
g)=
y
−3
x2
−x2
, y= +2
2
2
3.
x y3 + 3y 2 , x= y + 3
i) =
k) y =
− x 2 − 6 x + 9 , y = −3
(
)
l) y= ln x 2 − 10x + 26 , y = ln (10)
m) y =4 + ( x − 2) e
y =4 − ( x − 2) e
−
( x − 2)2
8
x2
2
+ 2, y = 2 (Para x ≥ 0)
x
x2 − 1
=
, y 1=
, x 1=
, x
2
Calcule el valor de a, para que el área de
la región limitada por las gráficas de las
ecuaciones
sea igual a 108 u2.
4.
( x − 2)2
8
−
y=
3 4 − x, y =
−3 4 − x , x =
a ( a < 4)
−4
2y
−2 y , x =
j) x =2 , x =
1+ y
−
=
, y 0=
, x 1 (Para x ≥ 1)
1
d) y =
− 4 − 2, y =
−2 , x =
0, x =
1
x
d) y =
2 − ln ( x + 1) ,=
y ln ( x + 1) , x = 0
−x
x3
4
−
, y=
0
c) y =
2
1 + ( x − 1)
1
b) y = x + 4 , y =− −4 − x , y = ( x + 4)
3
x
2− x
y 3 + 2, =
y 10 + 3 , x = 0
c) =
para −
1
Demuestre que el área de la región limitada por un triángulo equilátero de lado de
longitud l es
,
3 l2
4
5.
Demuestre que el área de un círculo de radio r es p r 2 .
6.
Demuestre que el área de un sector circular
de radio r y ángulo central θ en radianes
=
x 0=
, x 4
n) y= 3 +
y= 3 −
6x−4
1 + ( x − 4)
6x−4
1 + ( x − 4)
=
x 3=
, x 5
106
Cálculo II
2
2
,
es
,
7.
1 2
θr .
2
Las regiones A, B y C se muestran en la
figura 2.1.24.
Y
10. Calcule el área de la región infinita limitada
y = x3
A
0
por la gráfica de la ecuación.
B
y = 2x – x2
X
C
f ( x)= 4 +
8
1 + ( x − 4)
2
y su asíntota horizontal.
11. Sea D la región limitada por la gráfica de la
ecuación
y = x2 – 4
Fig. 2.1.24
Calcule Área(C) + Área(B) – Área(A).
8.
Halle el área de la región sombreada en la
figura 2.1.25.
Y
y = x2 + 2
x = –1
6 x −1
1 + ( x − 1)
2
,
la recta horizontal que pasa por el punto de
máximo absoluto de f y las rectas verticales
que pasan por los puntos de mínimos relativos de f. Calcule el área de la región D.
12. La recta L : y= x + 3 divide a la región interior de la elipse
ε :x
2
9
+
y2
1
=
36
en dos partes. Calcule el área de la región
mayor.
x = y2
13. Sea D la región limitada por las gráficas de
x+y=2
0
X
y = –2
Fig. 2.1.25
9.
y= f ( x)= 3 −
Calcule el área de la región limitada por las
gráficas de las ecuaciones
1
y=
lnx , y =
ln , y =
−2, y =
2
x
las ecuaciones
x2 − x + 1
=
y f=
, y 0
(x) ln 2
=
x + x + 1
y las rectas verticales que pasan por los puntos de máximo y mínimo relativo de la gráfica de f. Calcule el área de la región D.
14. Sea L la recta tangente a la gráfica de la
función f =
(x) 2 x − 2 en el punto de abscisa
x = 3. Calcule el área de la región D del plano limitada por la gráfica de f, la recta L y
el eje X.
Capítulo 2. Aplicaciones de la integral definida
107
2.2 Volumen de un sólido de revolución
En esta sección se aplica el concepto de integral definida al cálculo
del volumen de un sólido. Se tratan los métodos (por su orden de
presentación) del disco, del anillo y de la corteza cilíndrica.
Sólido de revolución es el que se genera cuando una región plana gira alrededor de una recta L contenida en el plano de la región
llamada eje de revolución o eje de giro (figura 2.2.1).
L
Eje de
giro
Sólido de
revolución
Fig. 2.2.1
Fig. 2.2.1
Método del disco para calcular el volumen de un sólido
de revolución
Sean f una función continua en el intervalo [a; b] , tal que f ( x) ≥ 0,
para todo x ∈ [a; b] , y D la región del plano limitada por la gráfica
de la función f y las rectas x = a, x = b y el eje X (figura 2.2.2).
Sea S el sólido de revolución que se obtiene al rotar la región D en
torno al eje X (figura 2.2.3).
Y
Y
y = f(x)
Sólido S
D
0
a
b
Fig. 2.2.2
µ1
a = x0
µn
µi
x1 … xi −1
xi
…
Fig. 2.2.4
xn −1 xn = b
Cálculo II
0
a
Z
X
Fig. 2.2.3
Para calcular el volumen del sólido S por el método del disco
se divide el intervalo I = [a; b] en subintervalos de igual longitud
b−a
=
P {x0 ; x1 ; x2 ; …; xn} . Además,
mediante la partición
∆x =
n
sea µi un número seleccionado aleatoriamente en cada subintervalo
, i
[xi −1 ; xi ]=
108
X
b
1, 2, … , n.
En cada subintervalo se traza un rectángulo cuya base es el El nombre “método del disco” se
subintervalo [xi −1 ; xi ] y cuya altura es f (µi ) . Al rotar cada región
limitada por dicho rectángulo alrededor del eje X se genera un sólido
cilíndrico de radio f (µi ) y altura ∆x, cuyo volumen está dado por
2
Vi =
p [ f (µi )] ∆x ,
debe a que el volumen del sólido de
revolución se puede aproximar mediante la suma de los volúmenes de
cilindros circulares (discos) apilados
uno a continuación de otro.
i=
1, 2, … , n.
Al sumar los volúmenes de los sólidos cilíndricos, se obtiene la
suma de Riemann VS de f asociada a la partición P y a los puntos
Y
y = f(x)
, i 1, 2 , … , n., es decir
seleccionados µi ∈ [xi −1 ; xi ]=
n
2
2
2
VS =p
p [ f (µ1 )] ∆x + … + p [ f (µn )] ∆x
∑ [ f (µi )] ∆x =
i =1
Esta suma representa aproximadamente el volumen del sólido
de revolución. Cuando n tiende al infinito en la suma de Riemann,
se obtiene la integral definida
n
2
lim ∑ p [ f (µi )] ∆x =
n→+∞ i =1
b
∫ p[ f (x)] dx
2
0
a
xi–1
xi
b
X
∆xi
Fig. 2.2.5
a
Esta integral representa el volumen V del sólido de revolución S.
Por consiguiente, el volumen V del sólido de revolución está dado por
V= p
b
∫ [ f (x)] dx
2
a
Observación 2
a) Sean f una función continua en el intervalo [a; b] , tal que
f ( x) ≥ k (k constante), para todo x ∈ [a; b] , y D la región del
plano limitada por la gráfica de la función f y las rectas x = a,
x = b e y = k (ver figura 2.2.6).
Sea S el sólido de revolución que se obtiene al rotar la
región D en torno a la recta horizontal y = k (ver figura 2.2.7).
Yy
Yy
Sección transversal
yy ==f f(x)
(x)
y=
y =kk
D
y=
y =kk
0
0
aa
Fig. 2.2.4
Fig. 2.2.6
bb Xx
Zz
Sólido
r (x)
x
aa
bb
Xx
S
Una sección transversal del sólido
de revolución S es un círculo que
se obtiene al intersecar el sólido
con un plano perpendicular al eje
de giro (ver figura 2.2.7).
Fig. 2.2.5
Fig. 2.2.7
Capítulo 2. Aplicaciones de la integral definida
109
El volumen V del sólido de revolución S está dado por
∫
b
∫
2
b
2
V=
p [r ( x)] dx =
p [ f ( x) − k] dx
a
a
donde r ( x) es el radio de la sección transversal, conocido
también como radio de giro.
b) Sean g una función continua en el intervalo [c; d] , tal que
g ( y) ≥ k (k constante), para todo y ∈ [c ; d] , y D la región del
plano limitada por la gráfica de la función g y las rectas y = c,
y = d y x = k (figura 2.2.8).
Sea S el sólido de revolución que se obtiene al rotar la región D en torno a la recta vertical x = k (figura 2.2.9).
Yy
dd
x=k
Yy
y=d
cc
x = g ( y)
dd
D
0
x=k
x = g ( y)
r ( y) = g ( y) − k
X
y=c
0
cc
x
Fig. 2.2.6
Sólido
S
Xx
Fig. 2.2.7
Fig. 2.2.8
Fig 2.2.9
El volumen del sólido de revolución S está dado por
∫
d
2
∫
d
2
V=
p [r ( y)] dy =
p [g ( y) − k] dy
c
c
donde r ( y) es el radio de giro.
Ejemplo 1
Calcule el volumen del sólido de revolución generado al rotar, en
torno al eje X, la región del plano limitada por las gráficas de las
ecuaciones
4
x4
yy = x =
=
, x 2
8 , y 0=
8
Yy
2
( )
x) ==
rr( x
0
x
x=2
Fig. 2.2.10
110
Cálculo II
x4
=
, y 0=
, x 2
8
x 44
x4
Solución
x − 0=
, x ∈ [0; 2]
8
8
8
Xx
Fig. 2.2.8
=
y
La región D del plano limitada por las gráficas de las ecuaciones
dadas se muestra en la figura 2.2.10.
Dado que el radio de cada sección transversal del sólido es
r ( x) =
x4
x4
− 0=
, x ∈ [0; 2]
8
8
el volumen del sólido de revolución está dado por
∫
∫
2
2 x4
2
2 x8
V=
p [r ( x)] dx =
p dx =
p
dx
0
0 8
0 64
2
∫
2
p x9
8
=
p
=
64 9 0 9
Por lo tanto, el volumen del sólido de revolución es
8 3
pu .
9
Ejemplo 2
Calcule el volumen del sólido S generado al rotar, en torno a la
recta L : y = 4 , la región del plano limitada por las gráficas de las
ecuaciones
x
y = 4 − 4cos , y = 4 , para p ≤ x ≤ 3p.
2
Solución
En la figura 2.2.11 se muestra la región D del plano limitada por
las gráficas de las ecuaciones dadas.
Y
x
y= 4 − 4 cos
2
r(x)
D
0
y=4
x
p
X
3p
Fig. 2.2.11
Como el radio de cada sección transversal del sólido S es
x
x
r ( x) = 4 − 4cos − 4 =− 4cos , x ∈ [p; 3p]
2
2
el volumen V del sólido de revolución S está dado por
2
3p
3p
2
x
V=
r ( x)] dx =
p
p
− 4cos dx
[
p
p
2
∫
16p
=
∫
∫
3p
x
cos2 dx =
8p
(1 + cosx) dx
p
p
2
3p
∫
3p
=8p [x + sen x]p =16p2
Por lo tanto, el volumen del sólido de revolución es 16p2 u3 .
Capítulo 2. Aplicaciones de la integral definida
111
Ejemplo 3
Calcule el volumen del sólido generado al rotar la región del
plano limitada por las gráficas de las ecuaciones
x3
y =+ 2 , y =
2 y
125
x=
−10
en torno a la recta L : x = −10.
Solución
En la figura 2.2.12 se muestra la región limitada por las gráficas
de las ecuaciones dadas.
Yy
y=2
− 10
x = −10
=
y
x3
+2
125
3
⇔ x=
125 ( y − 2)
⇔ x= 5 3 y − 2= f ( y)
0
r ( y)
− 22= = ff ((yy))
⇔ xx== 5533 y −
Xx
−6
Fig. 2.2.10
Fig. 2.2.12
Como el eje de giro ( L : x = −10) es una recta paralela al eje Y,
el radio de cada sección transversal es horizontal y su longitud
está dada por
r (=
y) f ( y) − (−10
=
) 5 3 y − 2 + 10, y ∈ [−6; 2]
Luego, el volumen V del sólido de revolución está dado por
V =p
∫
2
∫
2
2
2
r ( y)] dy =p
[
∫− 6 53 y − 2 + 10
−6
2
dy
25 ( y − 2)2 / 3 + 100 ( y − 2)1/ 3 + 100 dy
=
p
−6
2
5/ 3
4/3
=
p 15 ( y − 2) + 75 ( y − 2) + 100 y =
80p
− 6
Por lo tanto, el volumen del sólido de revolución es 80p u3 .
Método del anillo circular para calcular el volumen
de un sólido de revolución
Sean f y g funciones continuas en el intervalo cerrado [a; b] , tales
que f ( x) ≥ g ( x) ≥ k (k constante), para todo x ∈ [a; b] , y D la región
del plano limitada por las gráficas de las ecuaciones
=
y f (=
x) , y g (=
x) , x a=
y x b (figura 2.2.13)
112
Cálculo II
Sea S el sólido de revolución que se obtiene al rotar la región D
en torno a la recta horizontal y = k (figura 2.2.14)
Yy
R (x)
Yy
y = f (x)
y=k
0
r (x)
y = g (x)
r (x)
y=k
R (x)
a
b
Xx
0
Xx
Fig. 2.2.12
Fig. 2.2.11
Fig. 2.2.13
Fig. 2.2.14
El volumen V del sólido de revolución S es la diferencia de los
volúmenes del sólido exterior, con radio de giro R=
(x) f (x) − k , y el
x
g
x
−
k.
Esto
es,
sólido interior con radio de giro r=
( ) ( )
V =p
∫
b
b
2
2
∫ a [R (x)] dx − p∫ a [r (x)] dx
b
2
2
=
p ( f ( x) − k ) − ( g ( x) − k ) dx
a
Observación 3
Sean f y g funciones continuas en el intervalo cerrado [c; d] , tales
que f ( y) ≥ g ( y) ≥ k (k constante), para todo y ∈ [c ; d] , y D la región
del plano limitada por las gráficas de las ecuaciones
=
x f ( y)=
, x g ( y)=
, y c=
, y d (figura 2.2.15)
Sea S el sólido de revolución que se obtiene al rotar la región D
en torno a la recta vertical x = k (figura 2.2.16).
Yy
x=
g(
y)
f (y
x=
Yy
)
R( y )
D
r ( y)
0
x=k
Fig. 2.2.13
Fig. 2.2.15
Xx
0
x=k
Xx
Fig. 2.2.14
Fig. 2.2.16
Capítulo 2. Aplicaciones de la integral definida
113
El volumen V del sólido de revolución S está dado por
∫
d
∫
d
2
2
V=
p ( R ( y)) − (r ( y)) dy
c
2
2
=
p ( f ( y) − k ) − ( g ( y) − k ) dy
c
Ejemplo 7
Calcule el volumen del sólido de revolución S generado al rotar
en torno al eje X la región del plano limitada por la parábola
P : y = x 2 − 4x + 5 y la recta L : y= x + 1 .
Solución
Al resolver el sistema de ecuaciones
y = x 2 − 4 x + 5
y= x + 1
se obtiene que los puntos de intersección de la parábola P y la
recta L son A (1; 2) y B (4; 5) .
La región del plano limitada por la parábola P y la recta L
se muestra en la figura 2.2.17. Como los radios interior r ( x) y
exterior R ( x) de cada sección transversal son respectivamente
r ( x) = g ( x) − 0 = x 2 − 4x + 5, x ∈ [1; 4]
R ( x) = f ( x) − 0 = x + 1, x ∈ [1; 4]
Y
y = x2 – 4x + 5 = g(x)
5
y
=
x
+
1
B
=
)
f(x
A
r(x)
1 2
Fig. 2.2.15
Fig. 2.2.17
∫
4
2
2
V=
p ( R ( x)) − (r ( x)) dx
1
4
2
2
=
p ( x + 1) − x 2 − 4 x + 5 dx
1
(
∫
R(x)
x 4
el volumen V del sólido de revolución S está dado por
X
∫
=
p
4
1
− x 4 + 8x3 − 25x 2 + 42x − 24 dx
4
x5
117
25
=p − + 2 x 4 − x3 + 21x 2 − 24 x =
p
3
5
5
1
Luego, el volumen del sólido S es
114
Cálculo II
)
117 3
pu .
5
Ejemplo 8
Calcule el volumen del sólido S generado al rotar en torno a la
recta x = − 4 la región del plano limitada por las gráficas de las
ecuaciones
y=
− 4 − x, y =
− x + 4,
y=
0
Solución
La región del plano limitada por las gráficas de las ecuaciones
dadas se muestra en la figura 2.2.18.
R( y )
YY
r ( y)
–4
−4
0
0
4
4
x = 4− y
XX
2
−–22
x = −4
x = y2 − 4
Fig. 2.2.16
Fig. 2.2.18
Dado que los radios interior r ( y) y exterior R ( y) de cada sección transversal son respectivamente
(y2 − 4) − (−4=) y2 , y ∈ [−2; 0]
R ( y) = (4 − y 2 ) − (−4) = 8 − y 2 , y ∈ [−2; 0]
r ( y=
)
el volumen del sólido de revolución S está dado por
0
0
8 − y2
( R ( y))2 − (r ( y))2 dy =
p
p
V=
−2
−2
∫ (
∫
) − (y2 ) dy
2
2
0
0
16
256
64 − 16 y 2 dy =
=
p
p 64 y − y3 =p
−2
3 −2
3
∫ (
)
Por lo tanto, el volumen del sólido S es
256 3
pu .
3
Capítulo 2. Aplicaciones de la integral definida
115
Método de la corteza cilíndrica para calcular el volumen
de un sólido de revolución
Sean f una función continua en el intervalo cerrado [a; b] tal que
f ( x) ≥ 0 para todo x ∈ [a; b] , y D la región del plano limitada por
las gráficas de las ecuaciones
=
y f ( x)=
, y 0=
, x a=
, x b (figura 2.2.19)
Sea S el sólido de revolución que se obtiene al rotar la región D
en torno a la recta vertical x = k, ( k ∉ a; b ) (figura 2.2.20)
Yy
Yy
x=k
y = f (x)
D
0
a
x=k
b Xx
0
Fig. 2.2.19
k
a
b Xx
Fig. 2.2.20
Para obtener una expresión que permita calcular el volumen del
sólido S por el método de la corteza cilíndrica se procede de la siguiente manera:
=
Sea P {x0 ; x1 ; …; xn} una partición del intervalo cerrado [a; b]
que lo divide en n subintervalos de la forma [xi −1 ; xi ] , =i 1, … , n.
Para cada i= 1, … , n sean xi* el punto medio del intervalo
[xi −1 ; xi ] , Di la región rectangular de base ∆ xi = xi − xi −1 y altura
( )
f xi* , (figura 2.2.21) y Si la corteza cilíndrica generada por la
rotación de la región Di alrededor de la recta L : x = k (figura 2.2.22).
YY
YY
x=k
x=k
ri = xi − k
y = f (x)
hi = f ( xi )
0
k
x0 = a
Fig. 2.2.21
116
Cálculo II
= =xnxn X
xi −1xxi*i*xx
X
i bib
0
k
xi XX
∆xi = xi − xi −1
Fig. 2.2.22
Si r=
xi* − k , el volumen Vi de cada corteza cilíndrica Si es igual
i
a la diferencia entre los volúmenes del cilindro exterior de radio
∆x
∆x
ri + i y altura hi = f xi* y el cilindro interior de radio ri − i
2
2
y altura hi , es decir,
( )
2
Nota
Si k ≥ b, entonces r ( x)= k − x
Yy
2
∆x
∆x
Vi =
p ri + i hi − p ri − i hi =
2pri hi ∆ xi
2
2
y = f (x)
x=k
i =1, 2 , … , n, k ≤ a .
Así, el volumen del sólido S es aproximadamente igual a la suma
de los volúmenes de todas las cortezas cilíndricas S=
i , i 1, 2 , … , n ,
esto es
n
V ≈ ∑ 2pri hi ∆xi (Suma de Riemann)
i =1
0
a
x
b
k Xx
r ( x) = k − x
Fig. 2.2.23
Luego, el volumen V del sólido S es el límite de la suma de
Riemann cuando la norma de la partición tiende a cero, es decir
=
V
n
lim ∑ 2pri hi=
∆ xi
n
(
) ( )
lim ∑ 2p xi* − k f xi* ∆ xi
P →0 i 1 =
P →0 i 1
=
b
f ( x) dx
∫ (x−k)
( )
=
2p
a
r ( x)
hx
Observación 4
a) Sean f y g funciones continuas en el intervalo cerrado [a; b]
tales que f ( x) ≥ g ( x) , para todo x ∈ [a; b] , D la región del
plano limitada por las gráficas de las ecuaciones y = f ( x) ,
y = g ( x) , x = a, x = b y S el sólido de revolución que se obtiene al rotar D en torno a la recta vertical x k ( k ∉ a; b )
(Ver figura 2.2.24).
Yy
a
0
y = f (x)
x
b
Xx
h( x ) = f ( x ) − g ( x )
x=k
y = g (x)
r ( x) = x − k
Fig. 2.2.21
2.2.24
Fig.
Luego, el volumen V del sólido de revolución S está dado por
V=
2p
∫
b
a
x − k [ f ( x) − g ( x)] dx
r ( x)
h ( x)
Capítulo 2. Aplicaciones de la integral definida
117
b) Sean f y g funciones continuas en el intervalo cerrado [c; d] ,
tal que f ( y) ≥ g ( y) , para todo y ∈ [c ; d] , D la región del plano,
limitada por las gráficas de las ecuaciones x = f ( y) , x = g ( y) ,
y = c, y = d y S el sólido de revolución que se obtiene al rotar
D en torno a la recta horizontal y = k ( k ∉ c ; d ) (figura 2.2.25).
Y
r(y) = k – y
y=k
d
D
x = g(y)
x = f(y)
0
De las observaciones a) y b) se concluye que el radio de giro siempre
es perpendicular al eje de giro,
mientras que la altura siempre es
paralela al eje de giro.
X
c
h(y) = f(y) – g(y)
Fig. 2.2.25
Luego, el volumen V del sólido S está dado por
∫
V=
2p
d
c
y − k [ f ( y) − g ( y)] dy
r ( y)
h( y)
Ejemplo 9
Calcule el volumen del sólido de revolución generado por la
rotación de la región del plano limitada por las gráficas de las
ecuaciones y = 2sen x , y = −2sen x , para x ∈ [p; 2p] , en torno a
la recta x = p / 2.
Solución
En la figura 2.2.26 se muestra la región limitada por las gráficas
de las ecuaciones dadas.
r ( x)= x −
Y
p
2
y = –2sen x
2
0
xx ∈ [p; 2p] ,
x ∈ [p; 2p] ,
–2
h ( x) =−2sen x − 2 sen x =− 4 sen x , x ∈ [p; 2p]
X
y = 2sen x ,
x = p / 2.
Fig. 2.2.26
Dado que el radio de giro y la altura de cada corteza
cilíndrica son
p
r ( x)= x −
2
118
Cálculo II
h ( x) =−2sen x − 2 sen x =− 4 sen x , x ∈ [p; 2p]
el volumen V del sólido de revolución S es
∫
8p
=
∫
V=
2p
2p
p
2p
p
r ( x) h ( x) dx =
2p
∫
p
x − [− 4 sen x] dx
2
2p
p
p
− sen x] dx
x − [
2
dv
u
Al aplicar el método de integración por partes, se tiene
2p
p
V=
8p x − cos x − sen x = 16p2
2
p
Por lo tanto, el volumen del sólido de revolución es 16p2 u3 .
Ejemplo 10
Calcule el volumen del sólido generado por la rotación de la
región del plano limitada por las gráficas de las ecuaciones
=
y xe − x / 2=
, y 0=
, x 4, en torno a la recta x = 5.
Solución
En la figura 2.2.27 se muestra la región limitada por las gráficas
de las ecuaciones dadas.
YY
r ( x) = 5 − x
h( x) = f ( x) − 0 = xe
x
0
4
−x
2
X X
x=5
Fig. 2.2.24
Fig. 2.2.27
Como el radio de giro y la altura de cada corteza cilíndrica
son respectivamente
r ( x) =
5 − x , h ( x) =
xe − x / 2 , x ∈ [0; 4]
el volumen V del sólido de revolución está dado por
4
∫
=
2p (5x − x ) e
∫
V=
2p
0
4
0
∫
r ( x) h ( x) dx =
2p
2
−x/ 2
4
0
(5 − x) xe − x / 2 dx
dx
Al aplicar el método de integración por partes se tiene
Para trazar la gráfica de la ecuación
y = xe–x/2, se consideran:
• Asíntota horizontal hacia la
derecha: y = 0, pues
x
lim xe − x / 2 = lim x / 2
x →+∞
x →+∞ e
1
lim
= 0
1 x/ 2
e
2
• Intervalos de crecimiento
=
x →+∞
x
f ′ (=
x) e − x / 2 1 − =
0
2
(número crítico: x = 2)
Diagrama de signos de la primera
derivada
−
+
2
Máx : P(2; 2e −1 )
Fig. 2.2.28
Capítulo 2. Aplicaciones de la integral definida
119
u =5x − x 2 ⇒ du =(5 − 2x) dx
e−x/ 2 ⇒ v =
−2e − x / 2
dv =
(
)(
)
4
V=
2p 5x − x 2 −2e − x / 2 + 2
0
∫
4
0
e − x / 2 (5 − 2x) dx
De manera similar, al aplicar el método de integración por
partes a la última integral resulta
x 4
−
−2
V = 2p − 8e + 2 (5 − 2x) −2e 2 0 − 4
(
)
∫
4
0
e
−
x
2 dx
4
−x
−2
−2
V = 2p −8e + 2 6e + 10 + 8 e 2 0
(
)
V=
8p 5e −2 + 1
Por lo tanto, el volumen del sólido de revolución es
8p 5e −2 + 1 u3.
(
)
Ejemplo 11
Calcule el volumen del sólido de revolución generado por la
rotación de la región del plano limitada por las gráficas de las
ecuaciones y =3 − 9 + x , y =3 − 9 − x e y = 3, alrededor de la
recta y = 6.
Solución
En la figura 2.2.29 se muestra la región D limitada por las
gráficas de las ecuaciones dadas.
Y
y
22
( y −–3)
3) −–9 9
xx== (y
= 66
yy =
− (–y 3)
− 32)
x = 9x =–9(y
D
2
y
rr(y)
( y ) ==66–−yy
Como el eje de giro es una recta paralela al eje X, de acuerdo
con la observación 4b), para cada y ∈ [0; 3] , el radio de giro y la
altura de cada corteza cilíndrica son respectivamente
r ( y) =
6 − y ; h ( y) =
12 y − 2 y 2
y el volumen V del sólido de revolución está dado por
−–9
9
9
9
x
0
X
( y) –
= [(y
9 − (–y −3)
3)2]] −–[( y[(y
− 3)–3)
− 92] =–129]
y −=2 y12y – 2y 2
h(y) =h[9
2
2
Fig. 2.2.25
Fig . 2.2.29
2
3
∫
=
4p ( y
∫
V=
2p
0
3
0
3
∫ (6 − y) (12y − 2y ) dy
r ( y) h ( y) dy =
2p
3
2
0
)
− 12 y 2 + 36 y dy
3
y4
4p − 4 y3 + 18y 2 =
297p
=
4
0
Por lo tanto, el volumen del sólido de revolución es 297 p u3 .
120
Cálculo II
Ejemplo 12
Calcule el volumen del sólido que se genera al girar la región
4
=
x =
, x 2
limitada por las gráficas de las ecuaciones
1 + y2
alrededor de la recta y = –2.
Solución
En la figura 2.2.30 se muestra la región D limitada por las gráficas
de las ecuaciones dadas.
Y
=
h ( y)
4
−2
1 + y2
1
y
4
2
0
X
r(y) = y – (2) = y + 2
–1
y = –2
x=2
Fig. 2.2.30
Dado que el radio de giro y la altura de cada corteza cilíndrica
son respectivamente
4
r ( y) = y + 2 , h ( y) =
1 + y2
2 − 2y2
−2=
1 + y2
, y ∈ [−1; 1]
el volumen V del sólido de revolución está dado por
∫
1
∫
1
y − y3 + 2 − 2 y 2
−1
1 + y2
−1
= 4p
1
y
=
4p
dy − 4p
−1 1 + y 2
∫
∫
1
dy
∫ 1+ y
0
2
− 16p
∫
dy
y3
1
−1
f impar
= 16p
2 − 2y2
dy
2
1+ y
1
∫−1 (y + 2)
2p r ( y) h ( y) dy =
2p
V=
dy + 8p
2
1+ y
f impar
2
1
y +1−1
0
1 + y2
1
1
1
−1
1+ y
∫
dy − 8p
2
∫
f par
1
−1
y2
dy
1 + y2
f par
dy
1
= 16p [arctan ( y)]0 − 16p [y − arctan ( y)]0
= 8p2 − 16p = 8p (p − 2)
Por lo tanto, el volumen V del sólido de revolución es 8p (p − 2) u3.
Capítulo 2. Aplicaciones de la integral definida
121
Ejercicios y problemas resueltos 2.2
1.
Calcule el volumen del sólido de revolución generado por la rotación de la región plana limitada por las gráficas de las ecuaciones y = x2 – 1 e y = 3, en torno a la recta y = 3.
Solución
En la figura 2.2.31 se muestra la región del plano limitada por
las gráficas de las ecuaciones dadas.
Y
Y
y=3
0
−–22
22
−1
XX
Fig. 2.2.27
Fig. 2.2.31
Para cada x ∈ [ −2; 2 ] el radio de la sección transversal
(
)
correspondiente es r ( x) =3 − x 2 − 1 = 4 − x 2 . Luego, el volumen del sólido de revolución está dado por
∫
2
2
2
∫− 2 (
V=
p [r ( x)] dx =
p
4 − x2
−2
)
2
dx
2
2
8x3 x5
=
p
p 16x −
+
16 − 8x 2 + x 4 dx =
−2
3
5 −2
∫ (
=
)
512
p
15
Por lo tanto, el volumen del sólido de revolución es
2.
Calcule el volumen del sólido generado al rotar la región del
plano limitada por las gráficas de las ecuaciones
=
y
9 − x2
=
, x 3=
, y 3
3
en torno a la recta x = 3.
122
Cálculo II
512 3
pu .
15
Solución
En la figura 2.2.32 se muestra la región del plano limitada por
las gráficas de las ecuaciones dadas.
Y
x=3
Y
((0;
0;3)
3)
r ( y)
x = 9 − 3y
(3;
(3
;00))
0
XX
Fig. 2.2.28
Fig. 2.2.32
Dado que el radio de cada sección transversal del sólido es
r ( y) =3 − 9 − 3y , y ∈ [0; 3]
el volumen del sólido de revolución está dado por
∫
3
3
∫(
V=
p r 2 ( y) dy =
p 3 − 9 − 3y
=p
0
0
3
∫ (9 − 6
)
2
dy
)
9 − 3y + 9 − 3y dy
0
3
3y 2 4
9
3/ 2
=
p 18 y −
+ (9 − 3y) =
p
2
3
0 2
Por lo tanto, el volumen del sólido de revolución es
3.
9 3
pu .
2
Sea D la región del plano limitada por las gráficas de las ecuaciones y = ln x, y = 0 y x = e. Calcule el volumen del sólido de
revolución que se genera por la rotación de la región D en torno
a la recta x = e.
y
xx== ee
Y
11
Solución
y
y = lnyx=(xln=xe(y)x = e )
r ( y)
En la figura 2.2.33 se muestra la región del plano D.
Para cada y ∈ [0; 1] el radio de la sección transversal correspondiente es r ( y)= e − e y . Luego, el volumen del sólido de
revolución está dado por
∫(
1
V=
p
e − ey
0
)
2
∫(
1
)
dy =
p
e 2 − 2ee y + e 2 y dy
0
0
Xx
Fig. 2.2.29
Fig. 2.2.33
Capítulo 2. Aplicaciones de la integral definida
123
1
e2y
=
p e 2 y − 2ee y +
2 0
=
(4e − e 2 − 1) pu3
2
Por lo tanto, el volumen del sólido de revolución es
=
4.
(4e − e 2 − 1) pu3
2
En la figura 2.2.34 se muestra la región D del plano limitada
por las gráficas de las ecuaciones
1
y=
1+
, y=
1
x2 + 1
Y
Calcule el volumen del sólido que se genera cuando D gira
alrededor de la recta y = 1.
D
Solución
y=1
0
Para cada x ∈ , el radio de giro de la sección transversal correspondiente es
X
1
r ( x) = 1 +
−1 =
x2 + 1
Fig. 2.2.34
1
x2 + 1
El volumen del sólido de revolución está dado por
2
+∞
+∞
1
1
V=
dx =
dx
p
p
2
2
−∞
−∞
x +1
x +1
∫
=p
∫
1
0
−∞
2
x +1
∫
dx + p
∫
1
+∞
2
x +1
0
0
1
=
p lim
dx + lim
a →−∞ a x 2 + 1
b →+∞
∫
= p lim arctan x
a →−∞
0
a
∫
b
0
dx
1
2
x +1
+ p lim arctan x
b →+∞
dx
b
0
= −p lim arctan a + p lim arctanb = p2
a →−∞
b →+∞
Luego, el volumen del sólido de revolución es p2u3 .
5.
Calcule el volumen del sólido de revolución que se genera
cuando la región encerrada por las gráficas de las curvas
p
−cos 2 x , 0 ≤ x < 1
y=
− x −1 2, x ≥ 1
( )
rota alrededor de la recta y = −1.
124
Cálculo II
, y = −1
Solución
En la figura 2.2.35 se muestra la región limitada por las curvas
p
−cos 2 x , 0 ≤ x < 1
y=
, y = −1
− x −1 2 , x ≥ 1
)
(
Y
p
y = −cos x
2
0
(–1; 0)
y = –(x – 1)2
X
y = –1
0
Fig. 2.2.35
Los radios de giro de las secciones transversales correspondientes son
p
r ( x) =1 − cos x , 0 ≤ x < 1
2
2
r ( x) =1 − ( x − 1) , 1 ≤ x ≤ 2
Así, el volumen del sólido de revolución está dado por
V (S) = p
=p
2
p
1 − cos x dx + p
0
2
∫
1
∫
1
∫ (1 − (x − 1) ) dx
2
2 2
1
p
p
1 − 2cos x + cos2 x dx + p
0
2
2
∫ (1 − 2 (x − 1)
2
1
2
4
)
+ ( x − 1) dx
2
1
(x − 1)5
4
2
3
p x sen ( xp)
=
p x − sen x + +
+
p
x
−
x
−
1
+
(
)
p
2p 0
3
5
2 2
1
2 1 61 4
4 1
=p 1 + + + 1 − + = − p
3 5 30 p
p 2
61 4
Luego, el volumen del sólido de revolución es − pu3 .
30 p
Capítulo 2. Aplicaciones de la integral definida
125
6.
Demuestre que el volumen de una esfera de radio a es
4 3
pa
3
Solución
En la figura 2.2.36 se muestra la región del plano limitada por
las gráficas de las ecuaciones y =a2 − x 2 , y =
0.
YY
ya2=− x 2a,2 −
x02 .
y=
y=
r (x)
−a
a
0
X
X
Fig. 2.2.36
Fig. 2.2.33
Al rotar esta región alrededor del eje X se genera una esfera
de radio a.
Así, para cada x ∈ [−a; a] el radio de giro de la sección transversal correspondiente es r =
( x)
de la esfera está dada por
∫(
a
V=
p
a2 − x2
−a
a2 − x 2 . Luego, el volumen
p (a
) dx =
∫
2
a
−a
2
)
− x 2 dx
a
x3
4 3
=
p a2 x − =
pa
3 −a 3
Luego, el volumen de la esfera es
7.
YY
yy ==8 8
rr(x)
(x)
RR(x)
(x)
y ==xx2 2++4 4
x
yy ==44– −
2x 2
22
Fig. 2.2.34
Fig. 2.2.37
Cálculo II
y= 4 − 2x , =
y x 2 + 4, x = 0 y x = 2, en torno a la recta y = 8.
Solución
las gráficas de las ecuaciones y = 4 – 2x, y = x2 + 4, x = 0 y x = 2.
33
126
Calcule el volumen del sólido de revolución generado, al rotar
la región del plano limitada por las gráficas de las ecuaciones
En la figura 2.2.37 se muestra la región del plano limitada por
44
00 xx
4 3
pa .
3
XX
Como los radios interior y exterior de cada sección transversal son respectivamente
( )
; x ∈ [0; 2]
R ( x) =8 − (4 − 2x ) =4 + 2x
r ( x) =8 − x 2 + 4 =4 − x 2
el volumen del sólido de revolución está dado por
∫
V=
p
2
0
2
∫ (8 ⋅ 2
=
p
2
∫ (
R2 ( x) − r 2 ( x) dx =
p
x
0
4 + 2x
0
) − (4 − x2 ) dx
2
2
)
+ 22 x + 8x 2 − x 4 dx
2
1 2x 8 3 1 5
8 x
V=
2 +
2 + x − x
p
2ln2
3
5 0
ln2
63 224
=
p
+
ln2 15
Por lo tanto, el volumen del sólido de revolución es
63 224 3
p
+
u
ln2 15
8.
Sea D la región del plano limitada por las gráficas de las ecuaciones y3 = 2 x 2 y 2y = x 2 . Calcule el volumen del sólido de revolución que se genera cuando la región D gira alrededor de la
recta y = −2.
Solución
Los puntos de intersección de las
curvas se obtienen al resolver el sistema de ecuaciones
En la figura 2.2.38 se muestra la región D.
xx22
2
y ==
22 y = x
y = 3 2 x 2
2
2
33
yy =
2x2
= 2x
Yy
D
−2
Esto es,
x2
=
2
D
0
x2
y =
2
y = 3 2x2
3
6
2 x 2 ⇔ x=
16 x 2
(
)
⇔ x 2 x 4 − 16 =
0
2
Xx
⇔x=
−2, x =
0, x =
2
y = −2
Fig. 2.2.35
Fig. 2.2.38
Como los radios interior y exterior de cada sección transversal son respectivamente
x2
3
r ( x) =
+ 2 , R ( x) =
2x2 + 2
2
Capítulo 2. Aplicaciones de la integral definida
127
el volumen del sólido de revolución está dado por
2
2 x2
2 3
2
2
2
p
p
V=
R ( x) − r ( x) dx =
2x + 2 − + 2
−2
−2
2
∫
=p
2
∫ (
2
∫
)
x4
2/3 4/3
1/ 3 2 / 3
− 2x 2 dx
2 x + 4.2 x −
0
4
2
2
3
12
1
2
V =2p 22 / 3 x7 / 3 + ⋅ 21/ 3 x5/ 3 − x5 − x3
7
5
20
3 0
=
256
p
21
Por lo tanto, el volumen del sólido de revolución es
9.
256 3
pu .
21
Sea D la región del plano limitada superiormente por la cir2
p
e inferiormente por la gráfica
cunferencia C : x + y =
2
de la ecuación y = cos x. Calcule el volumen del sólido de revolución que se genera cuando D gira alrededor del eje X.
2
2
Solución
La región D se muestra en la figura 2.2.39.
Y
r (=
x) cosx , R (=
x)
p2
p ,p R (=
r (=
x) cosx
xy) =
− x 2 , x ∈ − ;
4
2 2
p2
p p
− x 2 , x ∈ − ;
4
2 2
D
y = cos x
R(x)
r(x)
r (=
x) cosx , R (=
x)
2
p
p ,
xx)∈ cosx
− x 2 r, (=
− 2 ;
4
pR (=
x)
2
p02
p p
− x 2 , x ∈ x− ;
4
2 2
X
Fig. 2.2.39
Dado que los radios interior y exterior de cada sección transversal son respectivamente
r (=
x) cosx , R (=
x)
p2
p p
− x 2 , x ∈ − ;
4
2 2
el volumen del sólido de revolución está dado por
128
Cálculo II
∫
p
2
R2 ( x) − r 2 ( x) dx
p
V=
p
−
∫
=
p
V =p
2
2
p
2
p2
2
2
− x − (cos x) dx
4
−
p
2
∫
p
2
2 p
0
4
− x 2 − cos 2 x dx
p
p2
x3 x sen 2 x 2 p2 2
= 2p x −
− −
p −3
=
3 2
4 0
6
4
(
)
Por lo tanto, el volumen del sólido de revolución es
p2 2
p − 3 u3 .
6
(
)
10. Calcule el volumen del sólido de revolución generado al rotar
la región del plano limitada por las gráficas de las ecuaciones
1
x=
4y2 − 4y , y = , y =
4
x +1
L : x = −1.
alrededor de la recta
Solución
En la figura 2.2.40 se muestra la región del plano limitada por
las gráficas de las ecuaciones
1
x=
4y2 − 4y , y = , y =
4
x +1
Los puntos de intersección de las
curvas
1
x =4 y 2 − 4 , y =
x +1
se obtienen al resolver el sistema
Y
4
y=4
x 4 y 2 − 4
=
1
x= y − 1
(48; 4)
x = 4y2 – 4y
1
4y2 − 4y = − 1
y
(0; 1)
48
X
⇔ 4 y3 − 4 y 2 + y − 1 =
0
(
)
⇔ ( y − 1) 4 y 2 + 1 =
0
=
y 1=
, x 0
x = –1
El punto de intersección es (0; 1)
Fig. 2.2.40
Capítulo 2. Aplicaciones de la integral definida
129
Como los radios interior y exterior de cada sección trans­
versal son respectivamente
1
1
r ( y)= − 1 − (−1)=
y
y
R ( y=
) 4 y 2 − 4 y − (−1=) 4 y 2 − 4 y + 1
(
)
; y ∈ [1; 4]
el volumen del sólido de revolución está dado por
∫
4
2
V=
p ( R ( y)) − r ( y))2 dy
1
4
2
1
=
p 4 y 2 − 4 y + 1 − 2 dy
1
y
∫ (
)
4
2 2
1
=
p 4 y −
1
2
∫
1
− 2 dy
y
4
1
1
=
p 16 y − − 2 dy
1
2
y
∫
4
4
5
16
33 597p
1 1
=
p y − + =
2 y
20
5
1
Por lo tanto, el volumen del sólido de revolución es
33 597 p 3
u.
20
11. En la figura 2.2.41 se muestra la región D del plano limitada por
3
las gráficas de las ecuaciones y =
0, y =
−1, x =
ye y , x =
−1
Y
x = y ey³
0
X
D
y = –1
x = –1
Fig. 2.2.41
130
Cálculo II
Calcule el volumen del sólido de revolución que se genera
cuando la región D gira alrededor de la recta x = 0.
Solución
Los radios interior y exterior de cada sección transversal son
respectivamente
3
3
r ( y) = 0 − ye y = − ye y , R ( y) = 0 − (−1) = 1, y ∈ [−1; 0]
Luego, el volumen del sólido de revolución es
V =p
∫
∫
0
−1
)
(
2
y3
1 − − ye
dy
0
1 − y 2 e 2 y
=
p
−1
3
dy
0
5 + e −2
1 3
=
p y − e 2 y =
p
6
−1
6
Por lo tanto, el volumen del sólido de revolución es
5 + e −2 3
p
u .
6
12. Un mecánico perfora un agujero a través del centro de una esfera de metal de 5 pulgadas de radio. El agujero tiene un radio
de 3 pulgadas, ¿cuál es el volumen del anillo resultante?
Solución
Y
5
R ( yx) ==−
25 y 2 , r ( y) =
3
–5
0
3
D
5
X
–5
Fig. 2.2.42
La región D gira alrededor del eje Y. Los radios interior y
exterior de cada sección transversal son respectivamente
R ( y) =−
25 y 2 , r ( y) =
3
Luego, el volumen del sólido de revolución está dado por
Capítulo 2. Aplicaciones de la integral definida
131
4
∫ (
)
25 − y 2 − 9 dy
V=
p
–4
4
y3
256p
16 − y dy =
=
p
p 16 y − =
–4
3
3
−4
4
∫ (
2
)
Por lo tanto, el volumen del anillo resultante es de
256p 3
u.
3
13. Sea D la región del plano limitada por las gráficas de las ecuaciones y = ln x, y = 0, x = 0, y ≤ 0. Halle el volumen del sólido
que se genera cuando D gira alrededor de la recta x = 1.
Solución
La región D se muestra en la figura 2.2.43.
y = ln x ⇔ x = e y
Y
0
X
D
x =1
Fig. 2.2.40
Fig. 2.2.43
Los radios interior y exterior de cada sección transversal
son respectivamente
R ( y) = 1, r ( y) = 1 − e y
p
V=
(
0
)
1 2 − 1 − e y 2 dy
()
−∞
∫
∫ (
)
0
=
p
2e y − e 2 y dy
−∞
=
p lim
b →−∞
∫
1
1
=
p lim 2 − − 2e b − e 2b
b →−∞
2
2
132
Cálculo II
0
1
( 2e y − e 2 y )dy =
p lim 2e y − e 2 y
b →−∞
b
2
b
0
1 3p
3
=
p lim − 2e b + e 2b =
b →−∞ 2
2 2
Por lo tanto, el volumen del sólido de revolución es
3p 3
u .
2
14. Sea D la región del plano limitada por las gráficas de las ecuax
ciones y = ln x,
=
y e=
, x 1 y x = e. Calcule el volumen del sólido que se genera cuando D gira alrededor del eje Y .
Solución
La región D se muestra en la figura 2.2.44.
Y
x
=
y e=
,x 1
y = ln x
D
0
x
=
y e=
,x 1
x = e.
X
Fig. 2.2.44
Como para cada x ∈ [1; e] el radio de giro y la altura son
r ( x=
) x , h (x=) e x − lnx
el volumen del sólido, calculado por el método de la corteza
cilíndrica, está dado por
V = 2p
e
∫1 (
)
x e x − lnx dx = 2p
∫
e
1
xe x dx − 2p
∫
e
1
xlnxdx
e
x2
x2
x
x e
2p xe − e − lnx −
=
1
4 1
2
e2 1
=p
2 (e − 1) e e − −
4 4
Por lo tanto, el volumen del sólido de revolución es de
e2 1
2p (e − 1) e e − − u3 .
4 4
Capítulo 2. Aplicaciones de la integral definida
133
15. Calcule el volumen del sólido de revolución que se genera por
la rotación de la región del plano limitada por las gráficas de
(
)
(
2
)
2
las ecuaciones
=
y x x2 + 1 , y =
− x x 2 + 1 , x = 1, en torno a
la recta x = 1.
Solución
La región plana se muestra en la figura 2.2.45.
Y
x=1
x
0
X
Fig. 2.2.45
Como para cada x ∈ [0; 1] el radio de giro y la altura están
dados por
r ( x) = 1 − x
(
)
2
(
)
2
(
)
2
h ( x)= x x 2 + 1 + x x 2 + 1 = 2x x 2 + 1 ,
el volumen del sólido de revolución es
V=
2p
=2p
1
2
∫ 0 (1 − x) 2x (x + 1)
1
∫ 2 (− x
0
6
2
dx
)
+ x5 − 2 x 4 + 2 x3 − x 2 + x dx
1
x7 x6 2 x5 x 4 x3 x 2 122
= 4p − +
−
+
−
+ =
p
6
5
2
3
2 0 105
7
Por lo tanto, el volumen del sólido de revolución es de
122 3
pu .
105
16. Sea D la región del plano limitado por las gráficas de las ecua-
p
p
≤ x ≤ y el eje X.
2
2
Calcule el volumen del sólido que se genera cuando D gira
p
alrededor de la recta x = .
2
ciones=
y cosx , −
134
Cálculo II
Solución
La región D se muestra en la figura 2.2.46.
Yy
x = pp
x = 2.
2
y = cos x
p p p
x ∈−− 2 ;
2 2
0
x p p p
x ∈x− ; 2
2 2
x
X
Fig. 2.2.43
Fig. 2.2.46
p p
Como para cada x ∈ − ; el radio de giro y la altura
2 2
están dados por
p
r ( x) =
− x y h ( x) =
cos x
2
el volumen del sólido de revolución está dado por
∫
p
2
p
V=
2p
− x cos x dx
p 2
−
2
p
p
2
2p − x sen x +
=
2
− p
2
p
2
x
dx =
2p
∫sen
−
p
2
2
impar
0
Por lo tanto, el volumen del sólido de revolución es de 2p2u3.
17. Sea D la región del plano limitada por las gráficas de las curvas
x
2
2 ( y − 1) =x + 2, y =
2
Y
y=4
Calcule el volumen del sólido que se genera cuando D gira al3
rededor de la recta y = 4.
x = 2(y – 1)2 – 2
y
Solución
La región D se muestra en la figura 2.2.47.
–2
D
(6; 3)
x = 2y
X
0
Como para cada y ∈ [0; 3] el radio de giro y la altura son
2
r ( y) = 4 − y , h ( y) = 2 y − 2 ( y − 1) + 2 = 6 y − 2 y 2
Fig. 2.2.47
Capítulo 2. Aplicaciones de la integral definida
135
el volumen del sólido de revolución es
3
∫ (4 − y) (6y − 2y ) dy
V=
2p
∫
2
0
3
V=
2p 2 y3 − 14 y 2 + 24 y dy
0
3
y4
y3
2p − 14 + 12 y 2 =p
45
=
3
2
0
Por consiguiente, el volumen del sólido de revolución es de
45pu3.
18. Sea D la región del plano limitado por las gráficas de
=
y
x2
=
, y
2
2x
Calcule el volumen del sólido que se genera cuando D gira
alrededor del eje x = −2.
Solución
La región D se muestra en la figura 2.2.48.
YY
xx== −−2.
2
xx2
=
, y
yy = =
22
=
y
2x
x2
=
, yy= 22xx
2
D
D
–2
0
xx =
−2.
X
X
Fig. 2.2.45
Fig. 2.2.48
Como para cada x ∈ [0; 2] el radio de giro y la altura son
r ( x) = x − (−2) = x + 2 , h ( x) =
2x −
x2
2
el volumen del sólido es
2
∫ 0 (x + 2)
V=
2p
=p
2
136
Cálculo II
∫
2 x−
x2
dx
2
x3
3/ 2
+ 2 2x1/ 2 − x 2 dx
2x −
0
2
2
2
2 2 5 / 2 x 4 4 2 3 / 2 x3
116
=p
+
2
x −
x − = p
5
8
3
3
0 15
Por lo tanto, el volumen del sólido de revolución es de
116 3
pu .
15
19. Sea D la región del plano limitada por las gráficas de las ecuaciones x = sen y , x = 2, y = 0, y = p.
Calcule el volumen del sólido que se genera cuando D gira
L : y = −1.
alrededor de la recta
Solución
La región D se muestra en la figura 2.2.49.
Y
y = p.
x = sen y
x=2
D
X
0
L : y = −1.
Fig. 2.2.49
Como para cada y ∈ [0; p] el radio de giro y la altura son
r ( y) =
y + 1, h ( y) =
2 − sen y
el volumen del sólido de revolución está dado por
V=
2p
∫
p
0
( y + 1)(2 − sen y) dy
p
2p [( y + 1)(2 y + cos y)]0 −
=
{
∫
p
2 y + cos y) dy
(
0
= 2p 2p2 + p − 2 − y 2 + sen y
p
0
}
= 2p p2 + p − 2
Por lo tanto, el volumen del sólido de revolución es
2p p2 + p − 2 u3 .
Capítulo 2. Aplicaciones de la integral definida
137
eje Y. Calcule el volumen del sólido que se
genera cuando D gira alrededor del eje Y.
Ejercicios y problemas propuestos 2.2
1.
Calcule el volumen del sólido de revolución
generado al rotar alrededor de la recta y = 0,
la región del plano limitada por las gráficas
de las ecuaciones
6.
x2 y 2
−
= 1, x = 6, y = 0
16 9
=
y
en el primer cuadrante.
2.
3.
Calcule el volumen del sólido de revolución
generado al rotar alrededor del eje X, la región del primer cuadrante del plano limitada por las gráficas de las ecuaciones
7.
Sea D la región del plano limitada por las
gráficas de las ecuaciones y = tanx, x = 0 e
y = 1. Calcule el volumen del sólido que se
genera cuando D gira en torno a la recta
y = 1.
=
, x 0=
, y 0=
, x 8.
x
Calcule el volumen del sólido generado al
rotar en torno a la recta x = 0, la región del
plano limitada por las gráficas de las ecua-
y e − x − 1, x = 0.
ciones y = 2e x , =
8.
En la figura 2.2.50 se muestra la región del
plano D limitada por las gráficas de las
Calcule el volumen del sólido de revolución
generado por la rotación de la región del
plano limitada por las gráficas de las ecuaciones y= 9 − 3x , y = 9, x = 0, x = 2 , en
torno a la recta y = 9.
ecuaciones y = arctan x , y = 0 y x = 3.
Yy
1
3
9.
En la figura 2.2.51 se muestra la región D del
plano limitada por las gráficas de las curvas
2
x (3 − x) , y =
0.
de ecuaciones 9 y 2 =
yy =
= arctan
arctan xx ,
Yy
D
0
3
X
x
9 y 2 = x(3 − x) 2
Fig. 2.2.50
D
0
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta y = 0.
4.
Sea D la región del plano limitada por las
gráficas de las ecuaciones y 2= 4 − x, x = −5.
Calcule el volumen del sólido que se genera
cuando D gira alrededor de la recta x = −5.
5.
138
Sea D la región del plano limitada por las
gráficas de las ecuaciones y = ex, y = e y el
Cálculo II
Xx
Fig. 2.2.51
Calcule el volumen del sólido que se genera
cuando D gira alrededor del eje X.
10. Sea D la región limitada por las gráficas de
=
y
1
1 + x2
,=
y 0,=
x 1=
, x
3
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta y = 0.
11. Determine el volumen del sólido de revolución generado por la rotación de la región
del plano limitada por las gráficas de las ecuap
ciones y = sec x, y = tan x, x = 0, x = , en
4
torno a la recta y = −1.
12. Sea D la región del plano limitada por las
16. Sea D la región del plano limitada por las gráy e x + x, =
y ex − x
ficas de las ecuaciones =
y x = 1. Calcule el volumen del sólido que
se genera cuando D gira alrededor del eje X.
17. Sea D la región del plano limitada por las
y = − x. Calcule el vográficas de y = 4x –
lumen del sólido que se genera cuando D
gira alrededor de la recta y = 4.
x − lnx + 1,
gráficas de las ecuaciones y =
y = 2 y x = e. Calcule el volumen del sólido
de revolución que se genera cuando D gira
alrededor de la recta y = 1.
13. Calcule el volumen del sólido de revolución
18. Sea D la región del plano limitada por las
x 2,
generado al rotar alrededor del eje Y, la región del plano limitada por las gráficas de
las ecuaciones
x2 y 2
−
= 1, x = 6.
16 9
14. En la figura 2.2.52 se muestra la región D del
plano limitada por las gráficas de x = y cos y,
y2
y= 2, x= 2 +
4
2
=
y
1
1
=
, y
, x ≥1
x
x2
Halle el volumen del sólido de revolución
que se genera cuando D gira alrededor del
eje X.
19. Sea D la región del plano limitada por las
gráficas de las ecuaciones
=
y sen
=
x , y 0=
y x
x=3
Y
X
D
p
4
Halle el volumen del sólido de revolución
que se genera cuando D gira alrededor del
eje Y.
x = y cos y
0
gráficas de las ecuaciones
20. Sea D la región del plano limitada por las
–2
y= 2, x= 2 +
y2
4
Fig. 2.2.52
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta x = 3.
15. Sea D la región del plano limitada por las
grá­ficas de las ecuaciones y = lnx, y = 0 y
x = e. Halle el volumen del sólido que se genera cuando D gira alrededor de la recta x = 1.
21. Sea D la región del plano limitada por
y = arcsen x , y = arctan x y la recta x = 1.
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta x = 1.
gráficas de las ecuaciones
=
y
1
x2
=
, y
6
x2 + 1
Calcule el volumen de revolución que se
genera cuando D gira alrededor del eje X.
22. Sea D la región del plano limitada por
−x
y = e x , y = e y la recta y = e. Calcule el
volumen del sólido que se genera cuando D
gira alrededor de la recta y = e.
Capítulo 2. Aplicaciones de la integral definida
139
23 Sea D la región del plano limitada por las
gráficas de las ecuaciones
=
y
1
1 + x2
=
, y 0=
, x 1 y=
x
y=
ln ( x − 4) , y = x − 8 , y =
0, y =
4.
3
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta x = –1.
24. Sea D la región del plano limitada por las
gráficas de las ecuaciones
1
1
y = , y = − , y =1 e y = 2
x
x
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta y = 2.
25. Sea D la región del plano limitada por las
gráficas de las ecuaciones
1
y=
, x=
−1, x =
1 y el eje X .
1+ x
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta x = 1.
140
Cálculo II
26. Sea D la región del plano limitada por
Calcule el volumen del sólido que se
genera cuando D gira alrededor de y = –1.
27. Sea D la región del plano limitada por la
gráfica de la ecuación
=
y cos2 x , 0 ≤ x ≤
los ejes coordenados.
p
y
2
Calcule el volumen del sólido que se
genera cuando D gira alrededor de la
p
recta x = .
2
28. Sea D la región del plano limitada por las
gráficas de las ecuaciones =
y
4 − x2 ,
y =x3 − 3x 2 + 2x, a la derecha del eje Y.
Calcule el volumen del sólido que se genera cuando D gira alrededor de la recta x = –2.
2.3Longitud de arco
El objetivo de esta sección es calcular la longitud L de arco de una
curva C que una los puntos A y B, donde C es la gráfica de una función f con derivada f ' continua en el intervalo cerrado [a; b] , como
se muestra en la figura 2.3.1.
YY
a
00
b
Fig.
Fig2.3.1
2.3.1
XX
El valor de L se aproxima inicialmente mediante la suma de
longitudes de segmentos de rectas cuyos extremos pertenecen a la
curva (figura 2.3.2). Finalmente, el valor de la longitud de la curva
C es dado por una integral definida. A continuación se describe
este proceso.
{x0 ; x1 ; x2 ; …; xk −1 ; xk ; …; xn} una partición cualquiera
del intervalo [a; b] que divide al intervalo en n partes iguales. La
Sea P =
longitud de cada subintervalo es
b−a
∆x =
n
Para cada k ∈ {0; …; n} , sea Pk ( xk ; f ( xk )) el punto correspondiente en la curva C . Con estos puntos se construye la poligonal
formada por la unión de los segmentos de rectas Pk −1Pk ( k= 1, … , n) ,
como se muestra en la figura 2.3.2.
Y
P₂
P₀
0
P₁
Pk-1
a x1 x2
Pk
Pn
xk-1 xk b
X
Fig . 2.3.2
Capítulo 2. Aplicaciones de la integral definida
141
Sea LP la longitud de la poligonal dada por la suma de las
longitudes de los segmentos de recta Pk −1Pk , es decir,
n
n
(xk − xk −1 )2 + ( f (xk ) − f (xk −1 ))2
LP = ∑ Pk −1Pk = ∑
=
k 1=
k 1
Como f tiene derivada continua en el intervalo [xk −1 ; xk ] , entonces, por el teorema del valor medio aplicado a la función f en el
intervalo [xk −1 ; xk ] , existe uk ∈ [xk −1 ; xk ] , tal que
f ( xk ) − f ( xk −1 )= f ′ (uk )( xk − xk −1 )
Luego,
n
LP = ∑
k =1
(xk − xk −1 )2 + [ f ′ (uk )(xk − xk −1 )]2
n
n
2
2
= ∑ 1 + [ f ′ (uk )] ( xk − xk −1 ) = ∑ 1 + [ f ′ (uk )] ∆ xk
k 1=
k 1
=
Esta expresión corresponde a la suma de Riemann de la función
1 + [ f ′ ( x)] en el intervalo [a; b] asociada a la partición P .
2
Luego, el valor L de la longitud del arco de la curva C se obtiene
cuando n tiende a infinito
∆ xk = xk − xk −1
n
2
L = lim ∑ 1 + [ f ′ (uk )] ∆ xk
n→∞ k =1
Como f y su derivada f ' son continuas en el intervalo cerrado
[a; b] , entonces el límite anterior existe. Así, por definición de integral definida, se tiene
=
L
∫
b
a
2
1 + [ f ′ ( x)] dx
Por lo tanto, esta fórmula permite calcular la longitud L del arco
de la curva C , desde x = a hasta x = b.
Observación
Si C es una curva con ecuación x = f ( y) , donde f y su derivada f '
son continuas en el intervalo cerrado [c; d] , entonces la longitud L
del arco de la curva C , desde y = c hasta y = d está dada por
=
L
∫
d
c
2
1 + [ f ′ ( y)] dy
Ejemplo 1
Calcule la longitud de arco de la curva C dada por
p
=
f ( x) ln(sec x), para x ∈ 0;
4
142
Cálculo II
Solución
Las funciones f ( x) = ln(sec x) y f ′ ( x) = tan x son continuas en el
intervalo [0; p/ 4] . Luego, la longitud de arco de
p
la curva C , desde x = 0 hasta x = , es
4
p
=4
0
∫
L
∫
=
p
4
0
2
1 + tan x dx
p
=4
0
∫
2
sec x dx
p
=4
0
p
∫
sec x dx =[ln sec x + tan x ] 4 =ln
0
(
sec x dx
)
2 +1
Por lo tanto, la longitud de arco de la curva C es ln ( 2 + 1) u.
Ejemplo 2
Halle la longitud de la curva C : f ( x) = x 2 para x ∈ [0; 2]
Solución
Las funciones f ( x) = x 2 y su derivada f ′ ( x) = 2 x son continuas
en el intervalo [0; 2] .
Luego, la longitud del arco de la curva C , desde x = 0 hasta
x = 2, es
∫
2
∫
2
2
L = 1 + (2 x) dx = 1 + 4 x 2 dx
=
=
0
0
2
1
2
ln 1 + (2 x) + 2 x + 2 x 1 + 4 x 2
0
4
1
ln 17 + 4 + 17
4
(
)
Por lo tanto, la longitud de arco de la curva C para x ∈ [0; 2]
1
es ln 17 + 4 + 17 u.
4
(
)
Ejemplo 3
Calcule la longitud de la curva C dada por f ( x) = x para
x ∈ [0; 4] .
Solución
Dado que la función f ( x) = x es continua en el intervalo [0; 4] ,
pero su derivada f ′ ( x) =
1
no es continua en dicho intervalo,
2 x
no se puede utilizar la fórmula para calcular la longitud de arco
Capítulo 2. Aplicaciones de la integral definida
143
C para x ∈ [0; 4] . Sin embargo, al expresar x en términos de y, la
ecuación de la curva C es
C=
: x g=
( y) y 2 , y ∈ [0; 2]
donde g ( y) = y 2 y su derivada g′ ( y) = 2 y son continuas en el
intervalo [0; 2] .
Luego, la longitud L del arco de la curva C para y ∈ [0; 2] es
L
=
∫
2
0
2
1 + (2 y) dy=
∫
2
0
1 + 4 y 2 dy=
1
ln
4
(
)
17 + 4 + 17
Por lo tanto, la longitud del arco de la curva C es
1
4 ln
(
17 + 4 + 17 u
)
Ejercicios y problemas resueltos 2.3
1.
Calcule la longitud del arco de la curva C cuya ecuación es
C :=
y 16 − 2x3/ 2
Para una función f continua en [a; b]
cuya gráfica es la curva
C.
Solución
de la curva C.
En la figura 2.3.3 se muestra el arco AB
Y
P
desde el punto A (1; 14) hasta el punto B (4; 0)
C
Yy
Q
A(1;
14))
A
(1;14
CC
a
0
b
X
Fig. 2.3.4
0
La porción de la curva comprendida entre los puntos P (a; f (a)) y
Q (b; f (b)) se denomina arco de la
curva
C.
B(4;0)
0)
B(4;
4
4
1
1
Xx
Fig.2.3.3
2.3.3
Fig.
Las funciones f ( x=
) 16 − 2x3/ 2 y su derivada f ′ (x) = −3 x
son continuas en el intervalo [1; 4] .
Luego, la longitud de arco de la curva C medida desde x = 1
hasta x = 4 es
L (=
C)
144
Cálculo II
∫
4
1
2
1 + [ f ′ ( x)] =
dx
∫
4
1
(
1 + −3 x
)
2
dx
=
=
∫
4
3/ 2
2
1 + 9 x dx = (1 + 9 x)
27
1
4
1
2
37 37 − 10 10
27
(
)
de la curva C es
Por lo tanto, la longitud del arco AB
2
37 37 − 10 10 u.
27
(
2.
)
Calcule la longitud del arco de la curva
C :x =
5
1 y3
−
− ,
12 3y 4
medida desde y = –2 hasta y = –1.
Solución
Las funciones g ( y) =
g′=
( y)
1
3y 2
−
5
1 y3
y su derivada
−
−
12 3y 4
3y 2
son continuas en el intervalo [−2; − 1]
4
Luego, la longitud de arco de la curva medida desde y = −2
hasta y = −1 es
L (C ) =
=
2
1
3y 2
1+ 2 −
dy
3y
4
∫
−1
∫
−1
−2
9y
∫
−1
1
3 2
2 + y dy =
4
3y
=
−2
−2
2
1 + [g′ ( y)] dy =
1
4
+
∫
−1
−2
1 9 4
+ y dy
2 16
2
∫
−1
1
3 2
2 + y dy
−2 3y
4
−1
1 y3
23
=
− + =
3y 4 −2 12
Por lo tanto, la longitud del arco de la curva medida desde
y = −2 hasta y = −1 es
23
u.
12
Capítulo 2. Aplicaciones de la integral definida
145
3.
Halle la longitud de la curva
1 + 1 + csc 2 x
cscx
C :y =1 + csc 2 x − ln
medida desde x =
p
p
hasta x = .
4
2
Solución
(
)
y = 1 + csc 2 x − ln 1 + 1 + csc 2 x + ln (cscx)
csc 2 x cot x
csc 2 xcot x
y′ =
−
+
− cotx
1 + csc 2 x
1 + csc 2 x 1 + 1 + csc 2 x
(
)
=
−cot x 1 + csc 2 x
Como f ′ ( x) = −cot x 1 + csc 2 x es continua en el intervalo
p
p p
4 ; 2 , entonces la longitud de la curva C medida desde x = 4
hasta x =
p
es
2
L=
(C )
∫
∫
p
2
p
4
(
1 + −cot x 1 + csc 2 x
p
2
)
2
dx
p
2
p
4
=
csc x dx =
1
[−cot x] =
2
p
4
Por consiguiente, la longitud de arco de la curva C medida
p
p
desde x = hasta x = es 1 u.
4
2
4.
Calcule la longitud de arco de la curva
p
2
C :y = 4 − ln (cos x) , − < x <
medida desde x = −
p
2
p
p
hasta x =
4
4
Solución
p p
La función f ′ ( x) = tan x es continua en el intervalo − ;
4 4
Luego, la longitud del arco de la curva C medida desde
x= −
p
p
hasta x =
es
4
4
L (C )
=
146
Cálculo II
∫
p
4
p
−
4
2
1 + [ f ′ ( x)] dx
∫
=
p
4
−
=
∫
= ln
1 + tan x dx =
p
4
p
4
−
p
4
=
sec x dx
(
= 2ln
∫
2
)
p
4
−
sec x dx
[ ln sec x + tan x ]
2 + 1 − ln
(
p
4
(
p
4
p
−
4
La función f ( x) = sec x es
positiva en el intervalo
p p
− 4 ; 4
)
2 −1
)
2 +1
Por lo tanto, la longitud del arco de la curva C medida
p
p
desde x = − hasta x = es 2ln ( 2 + 1) u.
4
4
5.
Sea D la región limitada por las gráficas de las ecuaciones
y = 4 − ln (cos x) , −
p
p
<x< ,
2
2
y = 4 − ln( sen x), 0 < x < p e y = 4
Calcule la longitud del perímetro de la frontera de la región D.
Solución
La intersección de las gráficas de
las funciones
Las gráficas de las funciones
f ( x)= 4 − ln (cos x) y
p p
f ( x) = 4 − ln (cos x) , x ∈ − ;
,
2 2
g ( x)= 4 − ln (sen x)
g ( x) = 4 − ln( sen x), 0 < x < p e y = 4
se obtiene de la igualdad
f ( x) = g ( x)
se muestran en la figura 2.3.5
⇔ sen x =
cos x
p
⇔x=
4
Y
y = f(x)
L2
L1
Además, las derivadas de las funciones f y g son
y = g(x)
L3
f ′ ( x) = tan x y
(p/2; 4)
p p p p
0
f ( x) = 4 − ln (cos xx) ,= x−∈ − ;
,
4 2 2
g ’ ( x) = −cot x
X
Fig. 2.3.5
Las longitudes de los arcos que conforman el borde de la
región D son
L1 =
p
p
−0=
2
2
Capítulo 2. Aplicaciones de la integral definida
147
p
4 1+
L2 =
0
∫
=
∫
2
[ f ′ (x)]
p
4 sec x dx
=
0
dx
∫
p
4 1 + tan2 x dx
=
0
∫
p
4sec x dx
0
p /4
=
[ln sec x + tan x ]0
∫
p
2
(
)
=
ln 2 + 1
∫
2
p
2
2
L3 = 1 + [g′ ( x)] dx = 1 + [cot x] dx
=
p
4
p
2
p
2
p
4
p
4
csc x dx
∫=
∫
p
4
csc x dx
(
)
=
−ln 2 − 1
[ln csc x − cot x ] p / 4 =
p /2
Luego, el perímetro de la región D es
p
L1 + L2 + L3 = + 2ln
2
6.
Yy
10
0
Fig. 2.3.5
Fig. 2.3.6
)
x
10
x
+ e 10 , −10 ≤ x ≤ 10
Calcule la longitud del cable entre las dos columnas.
− 10
x
X
Solución
x
x
1 −
La derivada f ′ ( x) = −e 10 + e 10 es continua en el intervalo
2
[−10; 10]. Luego, la longitud del cable está dada por la longitud del arco de la curva C medida desde x = −10 hasta x = 10,
esto es
=
=
Cálculo II
−
=
L (C )
148
2 + 1 u.
En la figura 2.3.6 se muestra un cable que cuelga entre dos columnas que están a una distancia de 20 metros. Si el cable es un
arco de la curva cuya ecuación es
C=
:y 5 e
10
(
∫
10
∫
10
∫
10
−10
−10
−10
2
dy
1 + dx
dx
2
x
x
1 −
1 + −e 10 + e 10 dx
4
2
x
x
1 − 10
10
e
+ e dx
=
4
∫
10
−10
x
x
1 − 10
10
e
+ e dx
2
10
x
−x
=
5 −e 10 + e 10 =
10 e − e −1
−10
(
)
Por lo tanto, la longitud del cable entre las dos columnas es
(
)
10 e − e −1 ≅ 23, 504 m
7.
Encuentre la longitud del arco de la curva
C :
=
x
y2 1
− ln ( y)
2 4
medida desde y = e hasta y = e 2 .
Solución
La función f ′ ( y) = y −
1
es continua en el intervalo e ; e 2
4y
Luego, la longitud del arco de la curva C es
=
L (C )
=
=
=
=
∫
∫
∫
∫
∫
e2
2
1 + [ f ′ ( y)] dy
e
2
e2
1
1 + y − dy
4y
e
e2
1 + y2 −
e
1
1
+
dy
2 16 y 2
2
e2
1
y + dy
4y
e
e2
e
1
y + dy
4y
e2
y2 1
2e 4 − 2e 2 + 1
= + ln y =
4
e
2 4
Por lo tanto, la longitud del arco de la curva C medida
desde y = e hasta y = e 2 es
2e 4 − 2e 2 + 1
u.
4
Capítulo 2. Aplicaciones de la integral definida
149
Ejercicios y problemas propuestos 2.3
1.
3.
Calcule en cada uno de los siguientes ejercicios la longitud de arco de la gráfica de la
función en el intervalo indicado.
2
a) f ( x) = 2 ( x − 1) −
ln ( x − 1)
16
Sea D la región limitada por las gráficas de
las ecuaciones
=
y f ( x=
)
3 4/3 3 2/3
x − x , −2 2 ≤x≤2 2
8
4
=
y g ( x=
)
3 2/3 3 4/3
x − x , −2 2 ≤ x ≤ 2 2
4
8
como se muestra en la figura 2.3.7. Calcule el
perímetro de la región D.
,
2
2 ≤ x ≤ e +1
Yy
x5 / 2
1
b) f ( x=
+
, 1≤ x ≤ 4
)
5
x
yy == f(x)
f (x)
1 x
1
c) f ( x=
e + x + ln e − x + 1 , 1 ≤ x ≤ ln2
)
2
2
(
)
(
)
1
1
3
3 0
3
3
y, −g22( x=
2 22
y, g ( x=
2) ≤ x x≤22/ 3 −2 x 4 / 3 , −2 2 ≤ x ≤ 2
2 x 2 + 15x − ln (4 x + 15) =
) x2/ 3 − x4/ 3=
4
8
4
8
4
4
1≤ x ≤ 3
d) f ( x)=
(
e) f ( x) =
−
1
4x + 2 + 4− x −1 , 0 ≤ x ≤ 1
4ln (4)
f)
f ( x) =
)
1
x
+
, 1≤ x ≤ 2
10 6 x3
(
2.
yy == g(x)
g (x)
Fig. 2.3.7
5
1 3
g) f=
x + 3x − arctan x , −1 ≤ x ≤ 0
( x)
12
h) =
f ( x)
)
x 1 − x 2 arcsen x
−
, 0 ≤ x ≤1
4
4
Una hormiga camina a lo largo de la gráfica
de la ecuación
y = f ( x) =
1 5/ 2
5
+ 4
x +
5
x
4.
En la figura 2.3.8 se muestra un cable que
cuelga de dos columnas que están a una distancia de 8 metros. Si el cable es un arco de
la curva cuya ecuación es
=
y
2
4− x / 4 + 4 x / 4 , − 4 ≤ x ≤ 4
ln (4)
calcule la longitud del cable entre las dos
columnas.
Y
desde el punto A (1; 2) hasta el punto de intersección de esta curva con la recta L : x = 4.
La hormiga sigue por la recta L : x = 4
hasta llegar al eje X y de este punto regresa en línea recta al punto A. Calcule la
distancia total recorrida por la hormiga.
17
4ln( 2)
2
ln( 2)
–4
0
Fig. 2.3.8
150
Cálculo II
x
X
4
X
2.4 Revisión del capítulo
Los temas tratados en el capítulo se resumen en el siguiente esquema:
Aplicaciones de la
integral definida
Longitud de
arco
Volumen de
un sólido
Área de una
región plana
Método del
disco
Método de la
corteza cilíndrica
Método del
anillo
Ejercicios y problemas resueltos 2.4
1.
En la figura 2.4.1 se muestran las regiones D1 y D2 .
YY
yy==xexxe x
2
YY
2
1
D1
0
1
XX
00
Fig. 2.4.1
2.4.1
Fig.
y =y=ee2x
D2
X
1 X
Exprese el área de la región D2 en términos del área de la
región D1.
Capítulo 2. Aplicaciones de la integral definida
151
Solución
=
A ( D1 )
∫
1
2
=
e x x dx
0
1
2
∫
1
0
2
e x (2x) dx
1 1 z
1
=
e dz
A ( D2 )
2 0
2
∫
=
Por lo tanto, A ( D2 ) = 2 A ( D1 )
2.
Halle el área de la región limitada por la curva C :y= 4 − x 2 y
las rectas tangentes a C trazadas desde el punto A (0; 5) .
Solución
La región plana se muestra en la figura 2.4.2
Y
L1
L2
A(0; 5)
P(–1; 3)
Q(1; 3)
0
–1
1
X
Fig. 2.4.2
f ( x) =
4 − x 2 ⇒ f ′ ( x) =
−2 x
mT = −2x =
f ( x) − 5
x−0
⇒ −2x 2 = 4 − x 2 − 5
x 2 =⇒
1 x=
−1 ó x =
1
Punto de paso : P (−1; 3)
Para x = −1
mT = 2
L2 : y − 3= 2 ( x + 1)
L2 : =
y 2x + 5
Punto de paso : Q (1; 3)
Para x = 1
mT = −2
L1 : y − 3 =−2 ( x − 1)
L1 : y =
−2 x + 5
Por lo tanto, el área de la región sombreada es
152
Cálculo II
A ( D=
) 2
=2
∫
1
(
)
(−2 x + 5) − 4 − x 2 dx
= 2
0
1
2
∫ 0 (x − 1) dx =
1
∫ (x
2
0
2
2
3 1
x − 1) =
(
0 3
3
Por consiguiente, el área de la región sombreada es
3.
)
− 2 x + 1 dx
2 2
u .
3
Sea C la curva con ecuación y = lnx. Halle el área de la región limitada por C, la recta tangente a C en el punto (e; 1)
y el eje X.
Solución
La región plana se muestra en la figura 2.4.3
L
Y
(e; 1)
1
C : y= lnx ⇔ x= e y
D
0
1
e
X
Fig. 2.4.3
1
f ( x) =
lnx ⇒ f ′ ( x) =
x
La ecuación de la recta tangente que pasa por el punto (e; 1)
1
′ (e)
es
y tiene pendiente=
mT f=
e
L : y −=
1
1
(x − e) ⇒ L : x= ey
e
Luego, el área de la región D está dada por
1
1
y e 2
A ( D) = e y − ey dy =
e − 2 y
0
0
∫(
)
e
e
= e − − (1 − 0) = − 1
2
2
e
Por lo tanto, el área de la región D es − 1 u2
2
Capítulo 2. Aplicaciones de la integral definida
153
4.
Calcule el volumen del sólido de revolución que se genera al rotar la región plana D limitada por las gráficas de las ecuaciones
4x
=
, x 0=
, x 1=
, y 2
3 + 2x
=
y
alrededor de la recta y = 2.
Solución
En la figura 2.4.4 se muestra la región D
Y
y=2
r(x)
D
4x
=
, x 0=
, x 1=
, y 2
3 + 2x
=
y
0
x
X
1
Fig. 2.4.4
Dado que el radio de cada sección transversal del sólido es
4x
r ( x) =
2−
, x ∈ [0; 1]
3 + 2x
el volumen del sólido de revolución, por el método del disco,
está dado por
2
1
1
4x
V=
p r 2 ( x) dx =
p 2 −
dx
0
0
3 + 2x
∫
∫
∫
36
1
1 12
=p
dx =18p −
= p
0 3 + 2x 2
3 + 2x 0 5
(
)
1
Por lo tanto, el volumen del sólido de revolución es
5.
12 3
pu
5
Al hacer rotar el arco de la curva de ecuación
=
x
4e − y
1 + e−y
, para 0 ≤ y ≤ 10
alrededor de la recta x = 2 (donde x e y se miden en centímetros)
se obtiene la superficie de una copa para champagne.
Determine cuantas copas se pueden servir como máximo
con una botella de champagne de 750 ml, si cada copa se sirve
a los 3/ 4 de su capacidad.
154
Cálculo II
Solución
Para determinar la capacidad de cada copa obtendremos el volumen del sólido de revolución que se genera al rotar la región
plana D limitada por las gráficas
=
x
4e − y
=
=
, y 10
, x 2
1 + e−y
En la figura 2.4.5 se muestra la región D.
Y
x=2
10
4e − y
=
x
=
=
, y 10
, x 2
1 + e−y
y
r(y)
0
X
2
Fig. 2.4.5
Para cada y ∈ [0; 10] , el radio de la sección transversal correspondiente es
r ( y)= 2 −
4e − y
1 + e−y
Luego, el volumen del sólido de revolución, por el método
del disco, está dado por
2
4e − y
V=
pr ( y) dy =
p 2 −
dy
−y
0
0
1+ e
10
∫
∫
2
10
10
16e − y
16e −2 y
=
p
+
4 −
dy
−y
0
(1 + e − y )2
1+ e
∫
Sea u= 1 + e − y
du = −e − y dy
∫
V=
p
10
0
4dy + 16p
∫
1+ e −10
2
du
− 16p
u
∫
1+ e −10
2
u −1
u2
du
1+ e −10
10 16
=
p [4 y]0 −
u 2
16
16
=
p 40 −
+ 8 =
p 48 −
≅ 100 , 53
−10
1+ e
1 + e −10
Capítulo 2. Aplicaciones de la integral definida
155
Por lo tanto, la capacidad de cada copa es aproximadamente de
100, 53 cm3 = 100, 53 ml .
Como cada copa se sirve a los tres cuartos de su capacidad,
cada una contendrá 100, 53 (3/ 4) ≅ 75, 4 ml. Además, dado que
cada botella contiene 750 ml de champagne se podrán servir
aproximadamente 10 copas.
6.
Calcule el volumen del sólido de revolución generado por la
rotación de la región del plano limitada por las gráficas de las
3lny, 2x = lny, y = 1, y = 3 en torno a la
ecuaciones y 2 + 6 x =
recta x = 1.
Solución
La región del plano limitada por las curvas dadas se muestra
en la figura 2.4.6
x=1
Y
y=3
lny y 2
−
2
6
=
x
x=
y=1
1
ln( y)
2
1
1
0
X
Fig. 2.4.6
Como los radios interior y exterior de cada sección transversal son respectivamente
1
r ( y) =
1 − lny , y ∈ [1; 3]
2
2
1
y2 1
y
1 − lny − =−
1
R ( y) =
lny
+
, y ∈ [1; 3]
2
6 2
6
el volumen del sólido de revolución, por el método del anillo
circular, está dado por
3
∫
V=
p R2 ( y) − r 2 ( y) dy
1
2
2
2
1
y 1
=
p 1 − lny + − 1 − lny dy
1
2
6 2
∫
=
156
Cálculo II
p
3
3
∫
y 4 y 2 lny
2
y
+
−
dy
1
12
2
3
3
p y3 y5 p 3 2
= + −
y ln y dy
1
3 3 60 1 6
∫
I
Al aplicar el método de integración por partes en I, se tiene
u lny
=
=
,
dv y 2 dy
y3
1
=
dy ,
v
du =
y
3
3
y3
I = lny −
3
1
∫
3
y3
y2
y3
dy = lny −
1 3
9 1
3
3
Luego,
3
V=
3
y3
p y3 y5 p y3
+
−
lny
−
3 3 60 1 6 3
9 1
1273
p
=
− 9ln3
45
6
Por lo tanto, el volumen del sólido de revolución es
1273
p
− 9ln3 u3 .
45
6
7.
Calcule el volumen del sólido de revolución generado por la
rotación de la región plana limitada por las gráficas de las
ecuaciones y = cos (3x) , =
y
recta y = 1.
1 − x 2 , x = −1, x = 1 en torno a la
Solución
La región plana limitada por las curvas y = cos (3x) , =
y
x = −1, x = 1 se muestra en la figura 2.4.7.
1 − x2 ,
Y
y=1
=
y
1 − x2 ,
–1
0
1
X
y = cos (3x) ,
Fig. 2.4.7
Capítulo 2. Aplicaciones de la integral definida
157
Como los radios interior y exterior de cada sección transversal son respectivamente
r ( x) = 1 − 1 − x 2 , x ∈ [−1; 1]
R ( x) = 1 − cos (3x) , x ∈ [−1; 1]
el volumen del sólido de revolución, por el método del anillo,
está dado por
∫
1
R2 ( x) − r 2 ( x) dx
p
V=
−1
=
p
∫
(
−1
=p
2
∫
)
2
2
2
(1 − cos (3x)) − 1 − 1 − x dx
1
1
( −2cos (3x) − sen2 (3x) + 2 1 − x 2 + x 2 dx
0
sen (3x) 1
=2p −2
−
3 0
∫
1 1 − cos
( 6 x)
2
0
dx
1
1
x3
+ x 1 − x 2 + arcsen x +
0 3
0
1
2
x sen (6x)
x3
= 2p − sen (3x) − +
+ x 1 − x 2 + arcsen x +
2
12
3 0
3
sen 6 4 sen 3 3p − 1
V =
−
+
p
3
3
6
Por lo tanto, el volumen del sólido es
sen 6 4 sen 3 3p − 1 3
−
+
pu .
3
3
6
8.
Sea D la región del plano limitada por las gráficas de las ecuaciones x = arctan y, x = 0 y la recta y = 1. Calcule el volumen
del sólido que se genera cuando D gira alrededor del eje X.
Solución
La región D se muestra en la figura 2.4.8.
Y
y=1
D
x = arctan y,
x=0
0
X
Fig. 2.4.8
158
Cálculo II
En este caso el volumen del sólido generado se calcula con el
método de la corteza cilíndrica o el método del anillo. A continuación se muestra el cálculo del volumen por ambos métodos.
a) Método de la corteza cilíndrica
Para cada y[0; 1] el radio de giro y la altura son respectivamente (figura 2.4.9)
Y
=
r ( y) y=
, h ( y) arctan y
1
Luego, al aplicar el método de la corteza cilíndrica, el volumen del sólido es
∫
1
∫
1
V=
2p r ( y) h ( y) dy =
2p y arctan y dy
0
0
I
de donde, al calcular la integral I por partes, se tiene
1
y 2
1
2p arctan y −
V=
2
0 2
p 1
2 −
=p
8 2
1
1
∫ 1 − 1 + y
0
2
∫
1 y
dy
0 1 + y2
y
y=1
p
; 1
4
h(y)
x = arctan y,
r(y)
0
X
Fig. 2.4.9
2
dy
p (p − 2)
1
p 1
=p
2 − [y − arctan y]0 =
2
8 2
Por lo tanto, el volumen del sólido de revolución es
p (p − 2)
2
u3 .
b) Método del anillo circular
p
Para cada x ∈ 0; los radios exterior e interior de cada
4
sección transversal son respectivamente
R ( x) = 1 y r ( x) = tan x
Y
1
y=1
p
; 1
4
y = tan x
R(x)
r(x)
0
x
X
Fig. 2.4.10
Capítulo 2. Aplicaciones de la integral definida
159
Luego, al aplicar el método de anillo circular, el volumen
del sólido es
∫
p
p
∫(
)
p 4 R2 ( x) − r 2 ( x) dx =
p 4 1 − tan2 x dx
V=
0
0
p
1 + tan2 x =
sec 2 x
∫(
)
p/ 4
=
p 4 2 − sec 2 x dx =
p [2x − tanx]0
0
=
p
(p − 2)
2
Por lo tanto, el volumen del sólido de revolución es
p
(p − 2) u3 .
2
9.
Calcule el volumen del sólido de revolución generado al rotar
la región D limitada por las gráficas de las ecuaciones
x2
x2
=
y cos
=
=
, y sen
, x 0
2
2
en torno al eje Y (figura 2.4.11).
Y
x2
x2
=
y cos
=
=
, y sen
, x 0
2
2
1
p
2
;
2 2
x2
x2
=
y cos
=
=
, y sen
, x 0
2
2
0
X
Fig. 2.4.11
Solución
A continuación se muestran el cálculo del volumen por el método del disco.
Los radios de las secciones transversales son (figura 2.4.12)
160
Cálculo II
=
r1 ( y)
2
2 arcsen y , y ∈ 0;
2
=
r2 ( y)
2 arccos y , y ∈
2
; 1]
2
Y
x = 2 arccos y
1
r2(y)
p
2
;
2 2
p
2
;
2 2
D
r1(y)
x = 2 arcsen y
X
0
Fig. 2.4.12
Luego, el volumen del sólido está dado por
V =p
∫
=p
2
2 r2
1
0
( y) dy + p∫
2
2 2 arcsen y dy
0
∫
1
+p
I1
∫
2 arccos y dy
2
2
∫
∫
2
2
0
1
2
2
Para aplicar el método de integración por partes en I1 se selecciona
u = arcsen y
1
I2
2
2
=
p 2 [ y arcsen y ]0 −
1
+p 2 [y arccos y] 2 +
2
r2 2 ( y) dy
2
2
2y
dy
2
1− y
2y
dy
1 − y 2
2
1
p
p
2 2
= p 2 + 2 1− y
+ p − 2 − 2 1 − y 2 2
0
4
4
2
du =
1
1 − y2
dy
dv = dy
v=y
y en I2 se selecciona
u = arccos y
du = −
1
1 − y2
dy
dv = dy
v=y
=
p 2 2 − 2 =
2p 2 − 1
Por lo tanto, el volumen del sólido de revolución es
2p 2 − 1 u3.
10. La figura 2.4.13 muestra un cable de transmisión eléctrica que
cuelga entre dos postes. En estos casos, si se asume que la única
fuerza que actúa sobre el cable es su peso, entonces este adopta
la forma de una curva llamada catenaria, cuya ecuación es
ex/ a + e−x/ a
=
y a
, x ∈ [− k ; k]
2
Capítulo 2. Aplicaciones de la integral definida
161
Calcule la longitud del cable.
Y
a
0
–k
k
X
Fig. 2.4.13
Solución
La longitud del cable está dada por
∫
L=
k
1 + ( y′) dx =
−k
=
∫
2
k
−k
2
ex/ a − e−x/ a
1+
dx
2
ex/ a + e−x/ a )
(
=
dx
∫
2
k
∫
4
−k
k
−k
ex/ a + e−x/ a
dx
2
función par
= 2
∫
k
e x/ a + e−x/ a
=
dx ae x / a − ae − x / a
0
0
2
k
k
k
k
k
−
−
0
0
a
a
a
= a e − e − ae − ae = a e − e a u
(
)
11. Halle la longitud L de la curva de ecuación
y = f ( x) =
x − x 2 + arcsen x , 0 ≤ x ≤ 1
Solución
La longitud L de la curva está dada por
2
1
2
1− x
L = 1 + ( y′) dx = 1 +
dx =
0
0
x 1− x
∫
1
∫
∫
1
0
1
dx
x
Dado que la función f ’ tiene discontinuidad infinita en
x = 0 y f ’ es continua en el intervalo [a; 1] , (0 < a < 1) , la última
integral es impropia.
162
Cálculo II
Luego,
1
1 1
1 −
=
L lim
=
dx lim
=
x 2 dx
a → 0+ a x
a → 0+ a
∫
∫
1
1
= lim 2x 2 = lim 2 − 2 a = 2
a → 0+
a → 0+
a
Por lo tanto, la longitud de la curva es 2 unidades.
2
x2 − x4
12. Calcule la longitud de la curva cerrada de ecuación 8y=
Solución
Al despejar la variable y en la ecuación se tiene que la curva
dada equivale a la unión de las gráficas de las funciones f y g,
donde
1
y=
f ( x) =
x2 − x4
2 2
e
1
y=
g ( x) =
−
x2 − x4
2 2
cuyos dominios son iguales a
{
}
Dom ( f ) =
Dom ( g) =x ∈ / x 2 − x 4 ≥ 0 =
[−1; 1]
Las gráficas de las funciones f y g se muestran en la
figura 2.4.14.
Y
1
y=
f ( x) =x 2 − x 4
2 2
0
–1
1
y=
f ( x) =x 2 − x 4
2 2
1
1
ey=
g ( x) =
−
x2 − x4
2 2
X
1
ey=
g ( x) =
−
x2 − x4
2 2
Fig. 2.4.14
Como la curva es simétrica con respecto a los ejes coordenados,
su longitud es igual a 4 veces la longitud de la gráfica de f en el
intervalo [0; 1] , esto es
∫
1
∫
1
3 − 2x2
0
2 2 1 − x2
2
L=
4
1 + [ f ′ ( x)]
= 4
0
2
x − 2 x3
dx =
4
1+
dx
0
2 2 x2 − x4
∫
1
dx , x ≠ 0
(2x2 − 3)
2
=
2x2 − 3
para 0 < x <1, se tiene
2x 2 − 3 =3 − 2x 2
Capítulo 2. Aplicaciones de la integral definida
163
Como f ′ ( x) presenta discontinuidad finita en x = 0, discontinuidad infinita en x = 1 y la función f ' es seccionalmente continua en [0; b] donde 0 < b < 1; la última integral es impropia.
Luego,
L = 4 lim
b →1−
=
∫
b
3 − 2x2
0
2 2 1 − x2
dx
b
2 lim 2 arcsen x + x 1 − x 2
0
b →1−
2 lim 2 arcsenb + b 1 − b2 =
=
p 2
b →1−
Por lo tanto, la longitud de la curva cerrada es p 2 u.
13. La velocidad de un camión (en kilómetros por hora) está dada por
v (t ) =
1 3 9 2
t − t + 6t , t ≥ 0
16
8
donde t está en horas.
a) Exprese mediante una integral definida la posición del camión en el instante t.
b) Trace la gráfica de la función velocidad y represente el espacio recorrido por el camión durante las primeras 4 horas
como el área que está debajo de la gráfica de la función velocidad.
c) ¿Cuántos kilómetros ha recorrido el camión en 8 horas?
Solución
a) Como la función velocidad v (t ) es la derivada de la función
posición del camión en el instante t, esto es
=
e ’ (t ) v (t ) , t ≥ 0
entonces la posición del camión en el instante t está
dada por
e=
(t)
∫
t
0
v (s)=
ds
t
1
∫ 16 s
0
3
9
− s2 + 6s ds
8
b) Para trazar la gráfica de la función velocidad se determinan los extremos relativos y los intervalos de crecimiento (o
decrecimiento) mediante el criterio de la primera derivada.
Así se tiene
v′ (=
t)
3 2 9
1
t − t +=
6
(3t − 12)(t − 8)
16
4
16
Los números críticos de la función velocidad (v’(t) = 0) son
164
Cálculo II
t = 4 y t = 8 y el diagrama de signos de v′ (t ) es como muestra la figura 2.4.15.
Signos de v’(t)
0
4
8
Fig. 2.4.15
Luego, los puntos de máximo y mínimo relativo de
la gráfica de la función velocidad son respectivamente
A (4; 10) y B (8; 8) .
La gráfica de la función velocidad se muestra en la
figura 2.4.16.
v(t)
(Km/h)
A(4; 10)
10
B(8; 8)
0
4
8
t (horas)
Fig. 2.4.16
El espacio recorrido por el camión, representado por el
área de la región limitada por las gráficas de las ecuaciones
y = v (t ) , y = 0 y t = 4 (fig. 2.4.16) es
e (4)=
∫
4
0
v (s) ds=
∫
4 s3
0
9 2
− s + 6s ds
16 8
4
s4 3
= − s3 + 3s2 = 28
64 8
0
Por consiguiente, en 4 horas el camión ha recorrido 28
kilómetros.
c) Al reemplazar t = 8 en la función posición, se obtiene
e (8) =
∫
8
s4 3
v (s) ds = − s3 + 3s2 = 64
0
64 8
0
8
Por lo tanto, en 8 horas el camión ha recorrido 64
kilómetros.
Capítulo 2. Aplicaciones de la integral definida
165
14. En el 2010 un biólogo determinó que las tasas de crecimiento
de dos especies de plantas en una reserva de la región Loreto
(medidas en plantas nuevas por año) estaban dadas por
especie 1: r1 (t ) = 30 t
especie 2: =
r2 (t ) 20 3 2t + 20
donde t = 0 corresponde al final del año 2010.
En la figura 2.4.17 se muestran las gráficas de las funciones
r1 y r2 .
r
Plantas
nuevas
y = r1(t)
y = r2(t)
60
20
0
4
t(años)
Fig. 2.4.17
a) Exprese mediante una integral definida el número de plantas nuevas de cada especie que germinaron en los t primeros años.
b) ¿Cuál de las dos especies tuvo más plantas nuevas en los 4
primeros años?
c) ¿Qué representa la región sombreada?
d) En los primeros 9 años, ¿cuál de las dos especies tendrá mayor cantidad de plantas?
Solución
a) Dado que r(t) es la tasa de crecimiento de la cantidad de
plantas nuevas, entonces la cantidad de plantas nuevas que
germinaron en los t primeros años está dada por
p (t ) =
∫
t
0
r (s) ds
Luego, la cantidad de plantas nuevas para las especies 1
y 2 son respectivamente
P1 (t ) =
P2 (t ) =
166
Cálculo II
∫
t
∫
0
t
0
r1 (s) ds
r2 (s) ds
b) El número de plantas nuevas de la especie 1, representada
por el área de la región limitada por las gráficas de las ecuaciones y = r1 (t ) , y = 0 y t = 4 (figura 2.4.18) es
=
P1 (4)
4
∫
=
r1 (s) ds
0
∫
∫
4
0
r2 (s)=
ds
y = r1(t)
60
4
4
2 3/ 2
=
30 s ds 30=
3 s 160
0
0
y el número de plantas nuevas de la especie 2, representada
por el área de la región limitada por las gráficas de las ecuaciones y = r2 (t ) , y = 0 y t = 4 (figura 2.4.19) es
P2 (=
4)
r1(t)
4
∫
20 3 2s + 20=
ds 200
0
Por lo tanto, en los primeros 4 años el número de plantas nuevas es mayor en la especie 2 (200) que en la especie
1 (160).
c) La región sombreada en la figura 2.4.17 representa la diferencia entre el número de plantas nuevas de cada especie en
los 4 primeros años, esto es
P2 (4) − P1 (4) = 200 − 160 = 40
4
0
t
Fig. 2.4.18
y = r2(t)
r2(t)
60
20
0
4
t
Fig. 2.4.19
d) El número de plantas nuevas de la especie 1, representado
por el área de la región limitada por las gráficas de las ecuaciones y = r1 (t ) , y = 0 y t = 9 es
=
P1 (9)
9
9
r (s) ds
30 s ds
∫=
∫=
0
1
0
540
y el número de plantas nuevas de la especie 2 representada
por el área de la región limitada por las gráficas de las ecuaciones y = r2 (t ) , y = 0 y t = 9 es
P2 (=
9)
∫
9
0
r2 (s)=
ds
∫
9
20 3 2s + 20 ds ≅ 534
0
Por consiguiente, en los primeros 9 años el número de
plantas nuevas de la especie 1 es mayor que el de la especie 2.
15. En el valle de Cañete un ingeniero agrónomo encuentra en un
cultivo de zapallo una población de 7000 moscas blancas y recomienda su fumigación después de 2 días. Además, el ingeniero
agrónomo indica al agricultor que si cumple con el programa
de fumigación la razón de cambio de la población de moscas
blancas después de t días de su visita estará dada por
r (t ) = t 3 − 6t 2 + 3t + 10
miles de moscas blancas por día.
Capítulo 2. Aplicaciones de la integral definida
167
a) Exprese mediante una integral definida la población de
moscas blancas en el cultivo de zapallo en el intervalo de
tiempo [0; t] .
b) Encuentre la población de moscas blancas en el cultivo de
zapallo a los 2 días de la visita del ingeniero.
c) A los 5 días de la visita del ingeniero, ¿cuál es la población
de moscas blancas en el cultivo de zapallo?
Solución
a) Si r (t ) es la razón de cambio de la población de moscas
blancas ( P′ (t ) = r (t )) , entonces la población en el instante
t está dada por
t
) ds
∫ P′ (s=
)]10
[P (s=
0
P (t ) − P (0)
de donde
∫
t
t
∫
P (t ) =
P (0) + r (s) ds =
7 + r (s) ds
0
0
b) La población de moscas en el cultivo de zapallo en el instante t = 2 días es
P (2) =7 +
∫
2
0
r (s) ds =7 +
2
∫ (s
3
0
)
− 6s2 + 3s + 10 ds
2
s4
3s2
=
7 + − 2s3 +
+ 10s =
21
2
4
0
Por consiguiente, a los 2 días de la visita del ingeniero, la
población de moscas blancas en el cultivo de zapallo es de
21 000 moscas.
c) La población de moscas blancas en el cultivo de zapallo en
t = 5 es
P (5) =7 +
∫
5
0
r (s) ds =7 +
5
∫ (s
0
3
)
− 6s2 + 3s + 10 ds
5
s4
3s2
=
7 + − 2s3 +
+ 10s =
0, 75
2
4
0
Por lo tanto, a los 5 días de la visita del ingeniero, la población de moscas blancas que hay en el cultivo de zapallo
es de 750 moscas.
168
Cálculo II
16. En la figura 2.4.20 se muestra la gráfica de la función f ′ y las
regiones que forma esta gráfica con el eje X cuyas áreas en uni=
A ( D1 ) 10
=
, A ( D2 ) 14
=
, A ( D3 ) 10 ,
dades cuadradas son
=
A ( D4 ) 8=
y A ( D5 ) 4
Y
y = f’(x)
D1
–5
–3
D3
0
1
D2
D5
4
D4
8
10
X
Fig. 2.4.20
4 y Dom ( f ) = [−5; 10]
Si se sabe que f (−5) =
a) Determine los valores f (−3) , f (1) , f (4) , f (8) y f (10) .
b) Halle las coordenadas de los puntos de máximos y mínimos
locales de f.
c) Esboce la gráfica de f.
Solución
a) Para determinar los valores de f en los puntos x = –3, x = 1,
x = 4, x = 8, y x = 10 se utiliza el primer teorema fundamental del cálculo integral y la interpretación geométrica de la
integral definida de f’ sobre un intervalo cerrado [a; b] . Así,
se tiene
i) 10 = A ( D1 ) =
∫
−3
−3
f ′ ( x) dx = [ f ( x)]−5 = f (−3) − f (−5)
−5
4, resulta
Como f (−5) =
10 = f (−3) − 4 ⇒ f (−3) = 14
ii) 14 =A ( D2 ) =−
⇒ f (1) =
0
iii)=
10 A (=
D3 )
∫
⇒ f (4) =
10
∫
1
−3
4
1
∫
8
1
f ′ ( x) dx =
− [ f ( x)]−3 =f (−3) − f (1)
f ′ ( x=
) dx
)]14
[ f (x=
f (4) − f (1)
8
iv) 8 =
A ( D4 ) =
− f ′ ( x) dx =
− [ f ( x)]4 =
f (4) − f (8)
⇒ f (8) =
2
4
Capítulo 2. Aplicaciones de la integral definida
169
∫
v)
=
4 A=
(D5 )
10
8
f ′ ( x=
) dx
10
x)]8
[ f (=
f (10) − f (8)
⇒ f (10) =
6
b) En la figura 2.4.20 se observa que los números críticos de
f ( f ′ ( x) = 0) son x = −3, x = 1, x = 4 y x = 8. Los respectivos signos de la función primera derivada se muestran en el
diagrama de la figura 2.4.21.
+ –
Signo de f’(x)
–5
–3
–
+
1
+
4
8
10
Fig. 2.4.21
Del diagrama de signos de f ' se concluye que, los puntos P1 (−3; f (−3)) = P1 (−3; 14) y P2 (4; f (4)) = P2 (4; 10) corresponden a puntos de máximos relativos de f, mientras
que los puntos Q1 (1; f (1)) = Q1 (1; 0) y Q2 (8; f (8)) = Q2 (8; 2)
corresponden a puntos de mínimos relativos de f.
c) La gráfica de la función f se muestra en la figura 2.4.22.
Y
P1
P2
B(10; 6)
A(–5; 4)
Q2
–5
–3
0
Q1
Fig. 2.4.22
170
Cálculo II
4
8
10 X
Ejercicios y problemas propuestos 2.4
1.
4.
En la figura 2.4.23 se muestra la gráfica de la
función
Sean a y b números positivos tales que
a < ab . En la figura 2.4.25 se muestra la región D del plano limitada por la gráfica de
la función
=
f ( x)
f ( x) = x − 2 x − 3x + 8x − 4
4
3
2
1
, x ∈ [a; b]
x
el eje X y las rectas x = a y x = ab. Si el área
Y
de la región D es (ln3) u2 , calcule b.
y = x4 – 2x3 – 3x2 + 8x – 4
Yy
–2
0
2
1
y
X
D
Fig. 2.4.23
00
Halle el área de la región limitada por la
gráfica de f y la recta tangente a ella en el
punto de abscisa 1.
2.
3.
1
x
Halle el área de la región D del plano limita1
da por la gráfica de la ecuación y =
1 + x2
y el eje X.
En la figura 2.4.24 se muestra la gráfica de
una función f cuya derivada es continua en
el intervalo [0; 1] . Si el área de la región D
es 4u2 , calcule
a
ab
Xx
Fig. 2.4.25
5.
En la figura 2.4.26 se muestra la gráfica de
una función f continua en el intervalo [0; 3] .
Yy
y f (x)
0
0
1
2
3
Xx
1
∫ x f ′ (x) dx
0
Fig. 2.4.26
Si para cada x ∈ [0; 3] , A ( x) es el área de
la región del plano limitado por la gráfica
de f y el eje X en el intervalo [0; x] , determine el valor de verdad de cada una de las
siguientes afirmaciones
Y
y = f (x)
D
0
1
Fig. 2.4.24
X
∫
a) ∀x ∈ [0; 3] : A ( x) =
∫
b) ∀x ∈ [0; 1] : A ( x) =
x
0
x
0
f (t ) dt
f (t ) dt
Capítulo 2. Aplicaciones de la integral definida
171
c) ∀x ∈ [1; 2]=
: A ( x)
∫
x
0
∫
d) ∀x ∈ [0; 3] : A ( x) =
6.
x
0
f (t ) dt −
∫
x
1
f (t ) dt
f (t ) dt
Halle el área de la región del plano limitada
por la gráfica de y = 2x y la recta que pasa
por los puntos A (−1; 1 / 2) y B (1; 2) .
7.
Calcule el volumen del sólido de revolución
que se genera al rotar la región plana limitada por la curva de ecuación
=
y
4x
, x ∈ [0; 4]
3 + 2x
alrededor del eje X.
8.
Calcule la capacidad del macetero cuya
superficie se genera al rotar la curva de
ecuación
=
f ( y)
ey
1 + ey
, y ∈ [0; 4]
x3
x
y = − x, y =
3
3
en torno a la recta y = 2.
12. Calcule el volumen del sólido de revolución
generado por la rotación de la región del
plano limitada por las gráficas de las ecua-
x 2e − ey, y = 1 − 4x 2 , x = 0,
ciones x = e y , =
y = 0, alrededor de la recta x = −1.
13. Sea D la región del plano limitada por las
gráficas de las ecuaciones x =−
4 2 ( y − 1)
xy = 4. Calcule el volumen del sólido que se
genera cuando D gira alrededor de la recta
y = 2.
14. Sea D la región del plano limitada por las
gráficas de las ecuaciones y = lnx, y = x ,
x = 1, x = e. Calcule el volumen del sólido
que se genera cuando D gira alrededor de la
recta x = −1.
alrededor del eje Y.
15. Sea D la región del plano limitada por las grá9.
Calcule el volumen del sólido de revolución
generado por la rotación de la región infinita
del primer cuadrante limitada por las gráficas de las ecuaciones y = xe − x e y = 0, en
torno al eje X.
ficas de las ecuaciones y = e x , y = arctan x,
x = −1, x = 1. Calcule el volumen del sólido
que se genera cuando D gira alrededor de la
recta x = 1.
16. Halle la longitud de la curva de ecuación
10. Calcule el volumen del sólido de revolución
generado por la rotación de la región del
plano limitada por las gráficas de las
ecuaciones y = x 2 − 1 + 2, y = 1 – x2, x = –2,
x = 2 en torno a la recta y = 5.
11. Calcule el volumen del sólido de revolución
generado por la rotación de la región del plano limitada por las gráficas de las ecuaciones
172
Cálculo II
x2
y=
− ln 4 x para x ∈ [1; 4]
2
( )
17. Calcule la longitud de la curva
C :y = 1 − x 2 + arcsen x
desde el punto A (0; 1) hasta el punto
B (1; p / 2) .
18. La figura 2.4.27 muestra una estructura que
22. Dos automóviles A y B arrancan al mismo
consta entre otras partes de un cable rígido
de forma parabólica con las medidas indicadas. Halle la longitud del cable.
tiempo y aceleran partiendo del reposo. En
la figura 2.4.28 se muestran las gráficas de
las funciones de velocidad de cada auto.
VY
A
11 m
B
2m
VB (t ) = 3 2t
30 m
00
60 m
4
t(minutos)
Fig. 2.4.27
Fig. 2.4.28
19. La ecuación de una curva es y3 = x 2 . Ha-
a) En los primeros 4 minutos, ¿cuál de los
dos autos recorrió mayor distancia?
lle la longitud del arco que une los puntos
A (−1; 1) y B (1; 1) .
b) ¿Qué representa la región sombreada?
c) En los primeros 32 minutos, ¿cuál de los
dos autos va adelante?
20. Calcule la longitud del menor arco de la
1 comprendido
circunferencia C :x 2 + y 2 =
d) Estime el tiempo en que la distancia recorrida por ambos autos es igual.
1 3
4 3
entre los puntos A − ;
y B ; .
2
2
5 5
21. El valor total V (t) de la compañía Imafevi,
23. En la figura 2.4.29 se muestra la gráfica de
la función f ' y las áreas de las regiones que
forma esta gráfica con el eje X.
S.A.C. está cambiando a una tasa de
r (t ) = V ′ (t ) =t 2 + 10t + 24
de miles de soles por año, donde t es el número de años desde el 2010.
a) Trace la gráfica de la función
=
r (t ) V ′ (t ) , t > 0
b) Si el valor total de la compañía en el año
2010 fue de S/. 200 000, exprese mediante una integral definida este valor en el
instante t.
c) Estime el valor total de la compañía para
los años 2024 y 2030.
d) ¿En qué año la compañía tiene su
mínimo valor?
Y
A(D2) = 6u2
A(D1) = 4u2
–6
A(D4 ) = 9u2
D2
D1 –3
0
y = f’(x)
D4
3
6
9
D3
A(D3) = 8u2
D5
12
X
A(D5) = 5u2
Fig. 2.4.22
Fig. 2.4.29
− 4, Dom ( f ) = [− 6; 12] y
Si además f (− 6) =
la gráfica de f interseca al eje X en los puntos
de abscisa x = −5, x = 0, x = 4, y x = 7.
Capítulo 2. Aplicaciones de la integral definida
173
a) Determine los valores de f (−3) , f (3) ,
f (6) , f (9) y f (12) .
b) Halle las coordenadas de los puntos de
máximos y mínimos locales de f.
c) Esboce la gráfica de f.
d) Encuentre las coordenadas de los puntos
de máximos y mínimos absolutos de f.
Miles de
nacimientos
o muertes
9,25
y = r1(t)
y = r2(t)
3
0
2
12 t (horas)
24. La tasa de crecimiento de una población de
bacterias (miles de nacimientos por hora) y
su tasa de muertes (miles de muertes por
hora) están dadas por
=
r1 (t )
Tasa de nacimiento:
Tasa de muertes: =
r2 (t )
222t
(
)
6 t2 + 4
, t≥0
3t
, t≥0
4
En la figura 2.4.30 se muestran las gráficas de las funciones r1 y r2.
Fig 2.4.30
a) Si en el instante t = 0 hay 100 bacterias,
exprese mediante una integral definida
la población de bacterias que hay en cualquier instante t.
b) Estime el número de bacterias vivas que
hay 12 horas después.
c) De acuerdo con las gráficas de r1 y r2 ,
¿en qué instante la población de bacterias
llega a su máximo?
d) ¿Después de cuántas horas la población
de bacterias comienza a disminuir?
174
Cálculo II
Capítulo
3
Superficies
En este capítulo se tratan dos tipos particulares de superficie, cilíndrica y cuádrica. Se
presentan sus principales elementos, sus
ecuaciones y sus gráficas en el espacio
Sabes
Capacidades necesarias:
ü Graficar cónicas y funciones.
ü Determinar planos y rectas en el espacio tridimensional.
ü Describir algebraicamente vectores
paralelos.
Conocimientos previos
Gráficas de funciones algebraicas y
trascendentes.
Cónicas, sus ecuaciones y sus gráficas.
Sistema coordenado tridimensional.
Planos y rectas en el espacio.
Vectores paralelos.
Piensas
Habilidades por desarrollar:
ü Graficar una superficie cilíndrica
recta de generatriz paralela a un eje
coordenado a partir de su ecuación.
ü Describir gráfica y algebraicamente
las trazas de una superficie cuádrica.
ü Graficar una superficie cuádrica a
partir de su ecuación.
Secciones
3.1 Superficie cilíndrica
3.2 Superficies cuádricas
3.3 Revisión del capítulo
Haces
Competencias por alcanzar:
ü Resolver ejercicios y problemas que
involucren superficies cilíndricas o
cuádricas.
Es común observar en nuestro entorno objetos que tienen ciertas formas que
para algunas personas pueden parecer extrañas pero que forman parte de la
vida cotidiana.
Por ejemplo, los envases de ciertos productos (tarros de leche, conos de helados, latas de papas fritas, latas de cerveza), los depósitos de combustible, las
antenas parabólicas, los planetas del sistema solar, las construcciones arquitectónicas y las obras de arte que expresan cierto tipo de belleza tienen formas que
en matemática se llaman superficies.
En este capítulo se presenta la formulación matemática de algunas superficies que aparecen en nuestra vida cotidiana, las cuales conforman dos grupos:
superficies cilíndricas y superficies cuádricas.
Estas superficies se consideran como conjuntos de puntos en el espacio que
satisfacen ciertas condiciones, las que se expresan como una ecuación matemática al elegir un sistema de coordenadas adecuado. A partir de estas ecuaciones
se identifica el tipo de superficie, se analizan algunas de sus características y
luego se traza su gráfica.
Aquí se presentan las ecuaciones y los aspectos elementales de las superficies cilíndricas y cuádricas. En el tratamiento elemental se consideran las
propiedades intrínsecas (propiedades que no dependen del sistema de coordenadas) y las ecuaciones se obtienen cuando sus elementos de simetría son
paralelos a uno de los ejes coordenados o planos coordenados.
Fig. 3.1
176
Cálculo II
3.1 Superficie cilíndrica
En esta sección se presenta inicialmente el concepto general de una
superficie en el espacio 3 , para luego tratar en forma detallada un
tipo particular de superficie llamada superficie cilíndrica o simplemente cilindro.
Superficie
Una superficie S en el espacio 3 es un conjunto de puntos ( x; y ; z)
que verifican una ecuación de la forma E ( x; y; z) = 0 , esto es
{
}
S=
0
( x; y ; z) ∈ 3 / E ( x; y ; z) =
Ejemplo 1
La superficie S formada por todos los puntos ( x; y; z ) de 3 que
0 , es el plano que intersesatisface la ecuación 4x + 3y + 2z − 12 =
ca a los ejes coordenados en los puntos A (3; 0; 0) , B (0; 4; 0) y
C (0; 0; 6) (figura 3.1.1).
Z
6
C
S
B
0
4
Y
A
3
X
Fig. 3.1.1
Observación 1
No toda ecuación de la forma E ( x; y; z) = 0 representa una superficie. Por ejemplo, no existen puntos ( x; y; z) en 3 que verifiquen
−4, es decir
la ecuación x 2 + y 2 + z 2 =
{
}
S =( x; y; z) ∈ 3 / x 2 + y 2 + z 2 + 4 =
0 =
∅
Luego, S no es una superficie del espacio 3 .
Capítulo 3. Superficies
177
Superficie cilíndrica
Sea C una curva contenida en el plano P y L una recta no paralela
a dicho plano. Se denomina superficie cilíndrica S a la unión de todas las rectas paralelas a L que intersecan a la curva C . La curva C
se llama directriz y la recta L generatriz de la superficie cilíndrica
(figura 3.1.2).
SS
LL:: generatriz
generatriz
PP
: directriz
CC: directriz
Fig. 3.1.2
Fig. 3.1.2
Si la recta L es perpendicular al plano P, que contiene a la curva
directriz C , la superficie S se denomina superficie cilíndrica recta o
cilindro recto. En esta sección solo se tratarán cilindros rectos.
Observación 2
Si la curva directriz es una circunferencia C ,contenida en un plano
P y la recta generatriz L es perpendicular al plano P, la superficie
se denomina cilindro circular recto. Si la recta L no es perpendicular al plano P, la superficie se denomina cilindro circular oblicuo
(figura 3.1.3).
L
L
PP
LL
C
C
C
C
Cilindro
recto
Cilindrocircular
circular recto
Cilindro
circular
oblicuo
Cilindro circular
oblícuo
Fig. 3.1.3
Fig. 3.1.3
178
Cálculo II
PP
Para ilustrar cómo se obtiene la ecuación de una superficie cilíndrica recta se considera el caso particular en el que la curva directriz está contenida en uno de los planos coordenados.
{
L:L generatriz
: generatriz
Zz
}
0
Así, para el caso en que la curva C =
(x; y; 0) ∈ 3 / E (x; y) =
está contenida en el plano XY (z = 0) y la recta generatriz L tiene
vector dirección k = (0; 0; 1) , se procede de la siguiente manera:
Sean Q ( x; y ; z) un punto cualquiera de la superficie cilíndrica
S y LQ la recta que pasa por Q y que es paralela a la generatriz L.
Xx
La recta LQ interseca a la curva directriz C en el punto A ( x; y; 0)
(figura 3.1.4).
Q(x; y; z)
kk
0
C:
Yy
A(x; y; 0)
E ( x; y ) = 0
z=0
Fig. 3.1.4
Fig. 3.1.4
Dado que el punto A ( x; y; 0) pertenece a la curva C , se tiene que
E ( x; y ) = 0
Por lo tanto, la superficie cilíndrica S está dada por
S=
{(x; y; z) ∈ 3 /
}
E ( x; y ) = 0 ∧ z ∈
Observación 3
En general, cuando el cilindro es recto y su curva directriz está contenida en uno de los planos coordenados, la ecuación del cilindro
coincide con la ecuación de la curva directriz y la variable que no
aparece en la ecuación toma cualquier valor real. Así, la recta generatriz es paralela al eje de la variable que no aparece en la ecuación.
Ejemplo 2
Grafique el cilindro recto cuya curva directriz es
z= 4 − x 2
y = 0
C :
Solución
De acuerdo con la observación 3, la ecuación del cilindro recto
coincide con la ecuación de la curva directriz, esto es
S : z= 4 − x 2
donde la variable y, que no aparece en la ecuación, toma cualquier valor real.
Como la curva directriz es una parábola con vértice V (0; 0; 4)
que está contenida en el plano XZ, su recta generatriz L es paralela al eje Y. La gráfica del cilindro parabólico se muestra en la
figura 3.1.5.
Capítulo 3. Superficies
179
La superficie cilíndrica parabólica
recta está formada por la unión de
todas las rectas paralelas al eje Y y
que intersecan a la curva directriz.
generatriz
LL:: generatriz
zZ
directriz
Directriz
z = 4 − x2
CC:: z= 4 − x
2
y=0
y=0
y Y
xX
Fig. 3.1.7
Fig. 3.1.5
Ejemplo 3
Grafique el cilindro recto cuya directriz es la curva
(
)
2
=
z y2 + 4 e − y
C :
x = 0
Solución
Para graficar el cilindro recto primero se grafica la curva directriz C en el plano Y Z ( x = 0) . En este caso, la curva C es la gráfica de la función
=
z f (=
y)
(y2 + 4) e − y
2
para la cual se tiene
Dom ( f ) =
asíntota horizontal: z = 0 (eje Y ), ya que
lim f ( y) = 0
y→±∞
2
(
)
f ′ ( y) = −2 ye − y y 2 + 3 = 0 ⇒ y = 0
Luego, y = 0 es número crítico de f. El diagrama de signos de
f ’ ( y) se muestra en la figura 3.1.6.
Signo de f ’ ( y)
0
Fig. 3.1.6
Punto de máximo relativo: A ( 0; 4 ) . La gráfica de la curva
directriz C en el plano YZ ( x = 0) se muestra en la figura 3.1.7.
180
Cálculo II
Z
4
0
Y
Fig. 3.1.7
De acuerdo con la observación 3, la ecuación del cilindro recto S
coincide con la ecuación de la directriz, esto es
S=
:z
(y2 + 4) e − y
2
donde la variable x, que no aparece en la ecuación, toma cualquier
valor real.
Como la curva directriz está contenida en el plano Y Z, su recta
generatriz L es paralela al eje X. Así, la superficie cilíndrica es la
unión de todas las rectas paralelas al eje X que intersecan a la curva
C (figura 3.1.8).
Z
L: generatriz
(
)
2
=
z y2 + 4 e − y
C :
x = 0
directriz
0
Y
X
Fig. 3.1.8
Capítulo 3. Superficies
181
Ejercicios y problemas resueltos 3.1
1.
Grafique el cilindro recto cuya directriz es la curva
(
z ln x 2 + e 4
=
C :
)
y = 0
Solución
Para graficar el cilindro recto se grafica la curva directriz C en
el plano XZ . En este caso la curva C es la gráfica de la función
=
z f=
(x) ln ( x2 + e 4 )
para la cual se tiene
a) Dom ( f ) =
b) La gráfica de f no tiene asíntota horizontal pues
lim f ( x) = +∞
x→±∞
Como f es continua en , no tiene asíntota vertical.
c) f ′ ( x) =
2x
2
x + e4
= 0 ⇒x= 0
Luego, x = 0 es un número crítico de f y el diagrama de
signos de f ′ se muestra en la figura 3.1.9.
Signo de f ′ ( x) =
2x
2
x + e4
= 0 ⇒x= 0
0
Fig. 3.1.9
La gráfica de la curva directriz C en el plano XZ (y = 0)
se muestra en la figura 3.1.10.
10
Z
8
C : Directriz
6
4
2
X
–8
–6
–4
–2
0
–2
–4
Fig. 3.1.10
182
Cálculo II
2
4
6
8
Según la observación 3, la ecuación del cilindro recto S
coincide con la ecuación de la directriz, esto es
(
)
S:z =
ln x 2 + e 4 ,
y∈
Como la curva directriz está contenida en el plano XZ,
su recta generatriz L es paralela al eje Y , de modo que la
unión de todas las rectas paralelas al eje Y que intersecan
a la curva C forman la superficie cilíndrica (figura 3.1.11).
Z
0
X
Y
Fig. Fig.
3.1.13
3.1.11
2.
Trace la gráfica de cada una de las siguientes superficies
cilíndricas:
b) =
y x2 + 1
a) z = sen y
c) x 2 − z 2 =
1
Solución
De acuerdo con la observación 3, en cada caso la ecuación del
cilindro recto coincide con la ecuación de la curva directriz,
en la que la generatriz es paralela al eje de la variable que no
aparece en la ecuación de la directriz.
a)
Z
X
Y
z = sen y
Fig. 3.1.12
Capítulo 3. Superficies
183
b)
Z
0
X
Y
=
y x2 + 1
Fig. 3.1.13
c)
𝑍𝑍𝑍𝑍
𝑋𝑋𝑋𝑋
2
2
x −z =
1
Fig. 3.1.14
𝑌𝑌𝑌𝑌
Ejercicios y problemas propuestos 3.1
1.
2.
Trace la gráfica de cada una de las siguientes superficies
cilíndricas
36
a) S : 4 x 2 + 9 y 2 =
d) S : z 2 − y 2 =
1
b) S : z = sen x e) S : z = e y
c) S : y= 9 − x 2 f) S : z=
En cada uno de los siguientes casos trace la gráfica de la superficie cilíndrica cuya directriz es la curva C dada:
1
y= 2
a) C :
x +1
z=0
184
Cálculo II
x−2
z = x lnx
b) C :
y =1
z = e 2 y − y 2
c) C :
x = 1
3.2 Superficies cuádricas
En matemática básica, en los temas referentes a la geometría analítica, se presentó la ecuación de segundo grado en dos variables cuya
representación gráfica corresponde a cierto tipo de curva llamada
cónica (circunferencia, parábola, elipse e hipérbola) o a un caso
degenerado de ella. Al extender esta ecuación de segundo grado a
tres variables se obtiene una ecuación cuya representación gráfica
corresponde a una superficie o a un caso degenerado de ella. Así,
se tiene la siguiente caracterización: una superficie cuádrica (o cua3
drática) S en el espacio es un conjunto de puntos ( x; y ; z) que
verifican una ecuación de la forma
Ax 2 + By 2 + Cz 2 + Dxy + Exz + Fyz + Gx + Hy + Iz + J =
0
donde A , B, C , D , E, F , G , H , I y J son constantes reales y al menos uno de los coeficientes A , B, C , D , E o F es diferente de cero.
Ejemplo 1
Las siguientes ecuaciones corresponden a superficies cuádricas
1 a) x 2 + 2 y 2 + 4 z 2 =
b) x 2 + y 2 − 2z + 2 y =
4
Gráfica de una superficie cuádrica
Para trazar la gráfica de una superficie cuádrica se deben determinar:
• Puntos de intersección con los ejes coordenados
Son los puntos comunes de la superficie con cada uno de los
ejes coordenados.
• Traza de una superficie
Una traza de una superficie es una curva que se obtiene al
intersecar la superficie con un plano. Para las superficies cuádricas solamente se consideran trazas con planos paralelos a
los planos coordenados.
Ejemplo 2
Sea S la superficie cuádrica de ecuación
9x 2 + 4 y 2 − z 2 − 36 =
0
a) Halle los puntos de intersección de S con los ejes coordenados.
b) Grafique las trazas de S con los planos
=
P1 : x 0=
, P2 : y 2
y=
P3 : z 3
Capítulo 3. Superficies
185
Solución
a) i) Intersección con el eje X.
Al reemplazar y = 0 y z = 0 en la ecuación de S se obtiene
9x 2 =36 ⇔ x 2 =4 ⇔ x =−2 ∨ x =2
Luego, los puntos de intersección de S con el eje X son
A (−2; 0; 0) y B (2; 0; 0) .
ii) Intersección con el eje Y .
Al reemplazar x = 0 y z = 0 en la ecuación S se obtiene
4 y 2 =36 ⇔ y 2 =9 ⇔ y =−3 ∨ y =3
Luego, los puntos de intersección de S con el eje Y son
C (0. − 3; 0) y D (0; 3; 0) .
iii) Intersección con el eje Z.
Al reemplazar x = 0 e y = 0 en la ecuación S se obtiene
− z 2 − 36 =⇔
0
z2 =
−36
La última ecuación no tiene solución en , lo cual significa que la superficie S no interseca al eje Z.
Para determinar las trazas de una
superficie con un plano paralelo a
uno de los planos coordenados se
reemplaza el valor de la variable
que se indica en la ecuación del plano en la ecuación de la superficie.
b) i) Traza de S con el plano P1 : x = 0
Al reemplazar x = 0 en la ecuación de S se obtiene
4 y 2 − z 2 − 36 =0 ⇔
y2 z2
−
=1
9 36
que corresponde a una hipérbola en el plano P1 : x = 0
ii) Traza de S con el plano P2 : y = 2
Al reemplazar y = 2 en la ecuación de S se obtiene
9x 2 + 16 − z 2 − 36 =0 ⇔
x2
z2
−
=1
20 20
9
que corresponde a una hipérbola en el plano P2 : y = 2
iii) Traza de S con el plano P3 : z = 3
Al reemplazar z = 3 en la ecuación de S se obtiene
9x 2 + 4 y 2 − 9 − 36 = 0 ⇔
186
Cálculo II
y2
x2
+
=1
5 45
4
Esta ecuación corresponde a una elipse en el plano
P3 : z = 3
Z
La figura 3.2.1 muestra la gráfica de la superficie S con
sus trazas correspondientes.
Superficies cuádricas con ejes de simetría paralelos
a los ejes coordenados
X
Y
Aquí solo se consideran superficies cuádricas con ejes de simetría
paralelos a los ejes coordenados cuyas ecuaciones son de la forma
Ax 2 + By 2 + Cz 2 + Dx + Ey + Fz + G =
0
y que según los valores de los coeficientes corresponden a uno de
los siguientes tipos de superficie
1.
1. Elipsoide.
4. Cono elíptico.
2. Hiperboloide de una hoja.
5. Paraboloide elíptico.
3. Hiperboloide de dos hojas.
6. Paraboloide hiperbólico.
Fig. 3.2.1
Elipsoide
Una superficie cuádrica cuyos puntos ( x; y; z) verifican una ecuación de la forma
x2
a2
+
y2
b2
+
z2
c2
= 1 , a > 0, b > 0, c > 0
se denomina elipsoide con centro en el origen de coordenadas.
Para trazar la gráfica de esta superficie se determinan los puntos
de intersección con los ejes coordenados y sus trazas con planos paralelos a los planos coordenados.
a) Intersección con los ejes coordenados.
Al reemplazar en la ecuación dada dos de las variables por
cero se obtienen los puntos de intersección con los ejes coordenados que se muestran en la siguiente tabla
Intersección
x
y
z
Puntos de intersección
Con el eje X
±a
0
0
A1 (−a; 0; 0) , A2 (a; 0; 0)
Con el eje Y
0
±b
0
B1 (0; − b; 0) , B2 (0; b; 0)
Con el eje Z
0
0
±c
C1 (0; 0; − c) , C2 (0; 0; c)
Capítulo 3. Superficies
187
b) Trazas.
Para determinar las ecuaciones de las trazas del elipsoide
con los planos coordenados Y Z , XZ , XY se reemplaza resx 0=
, y 0=
, z 0 en la ecuación dada, como se
pectivamente=
muestra en la siguiente tabla.
Trazas del elipsoide con los planos coordenados
Plano coordenado Ecuación de la traza
y2
YZ : x = 0
b2
x2
XZ : y = 0
a2
x2
XY : z = 0
a2
+
+
+
z2
c2
z2
c2
y2
b2
Curva (traza)
=
1
Elipse en el plano YZ
=
1
Elipse en el plano XZ
=
1
Elipse en el plano XY
La gráfica del elipsoide se muestra en la figura 3.2.2.
Z
Y
X
Fig. 3.2.2
188
Cálculo II
Observación 4
a) La ecuación del elipsoide con centro en el origen de coordenadas que tiene la forma
x2
a2
+
y2
b2
+
z2
c2
Nota
=
1
se conoce como la ecuación canónica del elipsoide.
b) Si el centro del elipsoide es el punto C (h; k ; l) su ecuación
tiene la forma
( x − h)
a
2
2
( y − k)
+
b
2
2
+
( z − l)
c2
2
=1, a > 0, b > 0, c > 0
Si en la ecuación del elipsoide
se tiene
a=b=c
la ecuación resultante es
x2 + y 2 + z2 =
a2
que representa una superficie
esférica con centro en el origen
de coordenadas y radio a.
Zz
que se conoce como la ecuación ordinaria del elipsoide.
Su gráfica se obtiene al trasladar el origen de coordenadas
al punto C ( h; k ; l ) . Las rectas que pasan por este punto y son
paralelas a los ejes coordenados se llaman ejes de simetría del
elipsoide (figura 3.2.4).
Z
0
Yy
X
x
Fig. 3.2.3
C(h; k; l)
0
X
Y
Fig. 3.2.4
Ejemplo 3
Dada la superficie
S : 4 x 2 + 9 y 2 + z 2 − 8x − 36 y − 2 z + 5 =
0
trace su gráfica e indique las coordenadas de su centro y los puntos de intersección con sus ejes de simetría.
Solución
Al completar cuadrados en las variables x, y, z se tiene
(
) (
) (
)
4 ( x 2 − 2x + 1) + 9 ( y 2 − 4 y + 4) + ( z 2 − 2z + 1) =−5 + 4 + 36 + 1
4 x2 − 2x + 9 y 2 − 4 y + z 2 − 2z =
−5
Capítulo 3. Superficies
189
2
2
2
4 ( x − 1) + 9 ( y − 2) + ( z − 1) =
36
(x − 1)2 ( y − 2)2 (z − 1)2
9
+
+
4
36
=
1
De acuerdo con la forma de la ecuación la gráfica corresponde
a un elipsoide con centro en el punto C (1; 2; 1) , donde los denoa2 9=
, b2 4=
, c 2 36 corresponden a los cuadrados
minadores=
de las longitudes de los semiejes paralelos al eje X , al eje Y y al
eje Z respectivamente; esto es=
a 3=
, b 2 y c = 6.
Con estas longitudes se determinan los puntos de intersección del elipsoide con sus ejes de simetría, tal como se muestra
en la siguiente tabla.
Eje de simetría
paralelo al eje
Proceso
Puntos de intersección
A1 (1 + 3; 2; 1) =
A1 (4; 2; 1)
X
Se suma y se resta a = 3
a la abscisa del centro.
Y
Se suma y se resta b = 2
a la ordenada del centro.
Z
Se suma y se resta c = 6
a la cota del centro.
A2 (1 − 3; 2; 1) =
A2 (−2; 2; 1)
B1 (1; 2 + 2; 1) =
B1 (1; 4; 1)
B2 (1; 2 − 2; 1) =
B2 (1; 0; 1)
C1 (1; 2; 1 + 6) =
C1 (1; 2; 7)
C2 (1; 2; 1=
− 6) C2 (1; 2; − 5)
En la figura 3.2.5 se muestra la gráfica del elipsoide y sus trazas con los planos x = 1 , y = 2, z = 1. Estas trazas pasan por los
puntos de intersección del elipsoide con los ejes de simetría.
Z
C(1; 2; 1)
X
Y
Fig. 3.2.5
190
Cálculo II
2.
Hiperboloide de una hoja
Una superficie cuádrica cuyos puntos ( x; y; z) verifican una ecuación de la forma
x2
a2
+
y2
b2
−
z2
c2
= 1, a > 0 , b > 0 , c > 0
se denomina hiperboloide de una hoja con centro en el origen de
coordenadas.
Para trazar la gráfica de esta superficie se determinan los puntos
de intersección con los ejes coordenados y sus trazas con planos paralelos a los planos coordenados.
a) Intersección con los ejes coordenados.
Los puntos de intersección con los ejes coordenados se muestran en la siguiente tabla.
x
y
z
Con el eje X
±a
0
0
A1 (−a; 0; 0) , A2 (a; 0; 0)
Con el eje Y
0
±b
0
B1 (0; − b; 0) , B2 (0; b; 0)
Con el eje Z
0
0
No existen
Intersección
Puntos de intersección
b) Trazas.
Las trazas del hiperboloide de una hoja con los planos coordenados se muestran en la siguiente tabla.
Trazas del hiperboloide de una hoja con los planos coordenados
Plano
Ecuación
coordenado
de la traza
YZ : x = 0
y2
b2
x2
XZ : y = 0
XY : z = 0
a2
x2
a2
−
−
+
z2
c2
z2
c2
y2
b2
Curva (traza)
=
1 Hipérbola en el plano Y Z
=
1 Hipérbola en el plano XZ
=
1 Elipse en el plano XY (elipse central)
Capítulo 3. Superficies
191
La gráfica del hiperboloide de una hoja se muestra en la
figura 3.2.6.
Z
X
Y
Fig. 3.2.6
Observación 5
a) La ecuación del hiperboloide de una hoja con centro en el origen de coordenadas que tiene la forma
x2 y 2 z 2
+
− =
1
a 2 b2 c2
se conoce como la ecuación canónica del hiperboloide de una
hoja. En este caso el eje Z se denomina eje del hiperboloide y
se caracteriza por ser un eje de simetría que no toca al hiperboloide. Además, corresponde al eje de la variable que lleva
signo negativo en el primer miembro de la ecuación.
Z
X
Y
Fig. 3.2.7
192
Cálculo II
Eje del hiperboloide
de una hoja
b) Si el eje del hiperboloide de una hoja es el eje X (figura 3.2.8),
su ecuación canónica es
−
x2
a2
+
y2
+
b2
z2
c2
=
1
Z
X
Y
Fig. 3.2.8
Si el eje del hiperboloide de una hoja es el eje Y
(figura 3.2.9), su ecuación canónica es
x2
a2
−
y2
b2
+
z2
c2
=
1
Z
Y
X
Fig. 3.2.9
c) Si el centro de un hiperboloide de una hoja es el punto
C (h; k ; l) y su eje es paralelo o coincidente con el eje Z (figura
3.2.10), su ecuación ordinaria es
( x − h) 2 ( y − k ) 2 ( z − l ) 2
a2
+
b2
−
c2
=1, a > 0, b > 0, c > 0
Capítulo 3. Superficies
193
Z
Las ecuaciones paramétricas del
eje que pasa por el punto C (h; k ; l)
y es paralelo al eje Z son
C ( h ; k ; l)
x = h
=
L : y k , t∈
z= l + t
Y
X
Fig. 3.2.10
En forma similar, las ecuaciones ordinarias para los casos
de hiperboloides de una hoja con ejes paralelos o coincidentes
a los ejes X e Y son respectivamente
−
( x − h) 2 ( y − k ) 2 ( z − l ) 2
+
a2
+
b2
c2
=1, a > 0, b > 0, c > 0
( x − h) 2 ( y − k ) 2 ( z − l ) 2
−
a2
+
b2
c2
=1, a > 0, b > 0, c > 0
Ejemplo 4
Dada la superficie
S : 36x 2 + 9 y 2 − 4z 2 − 144x + 54 y + 16z + 173 =
0
trace su gráfica e indique las coordenadas de su centro.
Solución
Al completar cuadrados en las variables x, y, z, se obtiene
(x − 2)2 ( y + 3)2 (z − 2)2
1
+
4
−
9
=
1
De acuerdo con la forma de la ecuación, la gráfica corresponde
a un hiperboloide de una hoja con centro en el punto C (2; − 3; 2)
y con eje paralelo al eje Z, donde los denominadores de los términos positivos a2 = 1 y b2 = 4 corresponden a las cuadrados
de las longitudes de los semiejes de la elipse central; esto es a = 1
y b = 2.
Para trazar la gráfica del hiperboloide de una hoja se dibuja
la elipse central (traza con el plano z = 2 ) y por sus vértices y
covértices se trazan las hipérbolas correspondientes a las trazas
con los planos x = 2 e y = −3 (figura 3.2.11).
194
Cálculo II
Ecuación de la elipse central
(traza con el plano z = 2)
Z
C (2; − 3; 2)
( x − 2)2 ( y + 3)2
+
=
1
1
4
z=2
Y
X
Fig. 3.2.11
3.
Hiperboloide de dos hojas
Una superficie cuádrica cuyos puntos ( x; y; z ) verifican una ecuación de la forma
−
x2
a2
−
y2
b2
+
z2
c2
= 1, a > 0 , b > 0 , c > 0
se denomina hiperboloide de dos hojas con centro en el origen de
coordenadas.
Para trazar la gráfica de esta superficie se determinan los puntos
de intersección con los ejes coordenados y sus trazas con planos paralelos a los planos coordenados.
a) Intersección con los ejes coordenados.
Los puntos de intersección del hiperboloide de dos hojas con
los ejes coordenados se muestran en la siguiente tabla.
Intersección
x
y
z
Puntos de intersección
Con el eje X
0
0
No existe
Con el eje Y
0
0
No existe
Con el eje Z
0
0
±c
C1 (0; 0; − c) ; C2 (0; 0; c)
Capítulo 3. Superficies
195
b) Trazas.
Las trazas del hiperboloide de dos hojas con los planos coordenados se muestran en la siguiente tabla.
Intersección del hiperboloide de dos hojas con los planos
coordenados
Plano coordenado Ecuación de la traza
z2
Y Z, x = 0
c
2
z2
XZ , y = 0
c
XY , z = 0
−
2
x2
a2
−
−
y2
b
2
x2
a
−
2
y2
b2
Curva (traza)
=
1
Hipérbola en
el plano Y Z
=
1
Hipérbola en
el plano XZ
=
1
No existe
La gráfica del hiperboloide de dos hojas se muestra en la
figura 3.2.12.
Z
C1 (0; 0; −c) ; C2 (0; 0; c)
0
El eje Z interseca al hiperboloide
en dos puntos llamados vértices,
V1 y V2, que se encuentran a c
unidades del centro.
Y (0; 0; c)
C1 (0; 0; −c) ; C
2
X
Fig. 3.2.12
Observación 6
a) La ecuación del hiperboloide de dos hojas con centro en el
origen de coordenadas que tiene la forma
−
196
Cálculo II
x2
a2
−
y2
b2
+
z2
c2
=
1
se conoce como la ecuación canónica del hiperboloide de dos
hojas, cuyo eje coincide con el eje Z. Note que la variable z
lleva signo positivo en el primer miembro de la ecuación.
Z
0
Y
X
Fig. 3.2.13
b) Si el eje del hiperboloide de dos hojas es el eje X (figura 3.2.14),
su ecuación canónica es
x2
a2
−
y2
b2
−
z2
c2
=
1
Z
X
0
Y
Fig. 3.2.14
Capítulo 3. Superficies
197
Si el eje del hiperboloide de dos hojas es el eje Y , su ecuación canónica es
−
x2
a2
+
y2
b2
−
z2
=
1
c2
Z
Y
0
X
Fig. 3.2.15
c) Si el centro de un hiperboloide de dos hojas es el punto
C (h; k ; l) y su eje es paralelo o coincidente con el Z, su ecuación ordinaria es
−
( x − h) 2 ( y − k ) 2 ( z − l ) 2
a2
−
b2
+
c2
=1, a > 0, b > 0, c > 0
Z
Eje del hiperboloide de
dos hojas paralelo al eje Z.
C ( h ; k ; l)
Y
X
Fig. 3.2.16
198
Cálculo II
En forma similar, las ecuaciones ordinarias para los casos
de hiperboloides de dos hojas con ejes paralelos o coincidentes con los ejes X e Y son respectivamente
( x − h) 2 ( y − k ) 2 ( z − l ) 2
−
a2
−
b2
−
c2
=1, a > 0, b > 0, c > 0
( x − h) 2 ( y − k ) 2 ( z − l ) 2
a2
+
b2
−
c2
=1, a > 0, b > 0, c > 0
Ejemplo 5
Dada la superficie
S : 2 x 2 − 4 y 2 + z 2 − 12 x + 8 y − 4 z + 34 =
0
trace su gráfica e indique las coordenadas de su centro.
Solución
Al completar cuadrados en las variables x , y , z se obtiene
−
(x − 3)2 ( y − 1)2 (z − 2)2
8
+
4
−
16
=
1
De acuerdo con la forma de la ecuación, la gráfica corresponde a un hiperboloide de dos hojas con centro en el punto
C (3; 1; 2) y con eje paralelo al eje Y , donde el denominador del
término positivo b2 = 4 corresponde al cuadrado de la distancia
del centro al vértice de cada una de las dos hojas (figura 3.2.17).
Z
X
0
Y
Al sumar y restar b = 2 a la ordenada del centro se obtienen las
coordenadas de los vértices del
hiperboloide de dos hojas. Esto es
V1 (3; − 1; 2) y V2 (3; 3; 2) .
Fig. 3.2.17
Fig. 3.2.17
Capítulo 3. Superficies
199
4.
Cono elíptico
Una superficie cuádrica cuyos puntos
ecuación de la forma
x2
a2
+
y2
b2
−
z2
c2
( x; y ; z)
verifican una
=
0
se denomina cono elíptico con vértice en el origen de coordenadas.
Para trazar la gráfica de esta superficie se determinan los puntos
de intersección con los ejes coordenados y sus trazas con los planos
coordenados.
a) Intersección con los ejes coordenados.
Los puntos de intersección del cono elíptico con los ejes coordenados se muestran en la siguiente tabla.
Intersección
x
y
z
Puntos de intersección
Con el eje X
0
0
0
V (0; 0; 0)
Con el eje Y
0
0
0
V (0; 0; 0)
Con el eje Z
0
0
0
V (0; 0; 0)
b) Trazas.
Las trazas del cono elíptico con los planos coordenados se
muestran en la siguiente tabla.
Intersección del cono elíptico con los planos coordenados
Plano
Ecuación de la traza
coordenado
YZ : x = 0
XZ : y = 0
XY : z = 0
y2
b
2
x2
a
2
x2
a2
−
−
+
z2
c
2
z2
c
2
y2
b2
Curva (traza)
=
0⇒ z=
±
cy
b
Dos rectas en el
plano YZ
=0 ⇒ z =±
cx
a
Dos rectas en el
plano XZ
=
0
C (0; 0; 0)
La gráfica del cono elíptico se muestra en la figura 3.2.18.
200
Cálculo II
Z
0
Y
X
Fig. 3.2.18
Observación 7
a) La ecuación del cono elíptico con vértice en el origen de coordenadas que tiene la forma
x2
a2
+
y2
b2
−
z2
c2
=
0
se conoce como ecuación canónica del cono elíptico. En este
caso el eje Z se denomina eje del cono y corresponde al eje de
la variable que lleva signo diferente en el primer miembro de
la ecuación.
i) Si el eje del cono elíptico es el eje X, su ecuación canónica es
−
x2
a2
+
y2
b2
+
z2
c2
=
0
Z
0
X
Y
Fig. 3.2.19
Capítulo 3. Superficies
201
ii) Si el eje del cono elíptico es el eje Y, su ecuación canónica es
x2
a2
−
y2
b2
+
z2
c2
=
0
Z
0
X
Y
Fig. 3.2.20
b) La ecuación del cono elíptico con vértice en el punto V(h; k; l) es
( x − h) 2 ( y − k ) 2 ( z − l ) 2
a2
+
−
b2
b2
= 0, a > 0, b > 0, c > 0
y se conoce como ecuación ordinaria del cono elíptico. La
recta que pasa por el centro V ( h; k ; l ) y es paralela al eje
coordenado que corresponde a la variable con signo diferente
se llama eje del cono elíptico (figura 3.2.21).
Z
V ( h; k ; l )
X
0
Y
Fig. 3.2.21
En forma similar, las ecuaciones ordinarias para los casos
de conos elípticos con ejes paralelos o coincidentes con los
ejes X e Y son respectivamente
202
Cálculo II
−
( x − h) 2 ( y − k ) 2 ( z − l ) 2
+
a2
+
b2
c2
( x − h) 2 ( y − k ) 2 ( z − l ) 2
−
a2
b2
+
= 0, a > 0, b > 0, c > 0
= 0, a > 0, b > 0, c > 0
c2
Ejemplo 6
Dada la superficie
S : 4 x 2 − 36 y 2 − 9 z 2 − 16 x + 72 y + 18z − 29 =
0
trace su gráfica e indique las coordenadas de su vértice.
Solución
Al completar cuadrados en las variables x, y, z se obtiene
−
(x − 2)2
9
2
+ ( y − 1) +
(z − 1)2
4
0
=
De acuerdo con la forma de la ecuación, la gráfica corresponde a un cono elíptico con vértice en el punto V (2; 1; 1) y con eje
paralelo al eje X. Para trazar la gráfica del cono elíptico se dibuja
la traza correspondiente al plano P1 : y = 1 (dos rectas) y las trazas con dos planos perpendiculares al eje del cono, por ejemplo
con los planos P2 : x = –2 y P3 : x = 6 (figura 3.2.22).
Z
Traza con el
plano x = –2
Traza con el
plano x = 6
X
Y
V (2; 1; 1)
Fig. 3.2.22
Capítulo 3. Superficies
203
5.
Paraboloide elíptico
Una superficie cuádrica cuyos puntos
ecuación de la forma
x2
a2
+
( x; y ; z)
verifican una
y2
= cz , a > 0, b > 0 y c ≠ 0
b2
se denomina paraboloide elíptico con vértice en el origen.
Para trazar la gráfica de esta superficie se determinan los puntos
de intersección con los ejes coordenados y sus trazas con planos paralelos a los planos coordenados.
a) Intersección con los ejes coordenados.
Los puntos de intersección del paraboloide elíptico con los
ejes coordenados se muestran en la siguiente tabla.
Intersección
x
y
z
Puntos de intersección
Con el eje X
0
0
0
V (0; 0; 0)
Con el eje Y
0
0
0
V (0; 0; 0)
Con el eje Z
0
0
0
V (0; 0; 0)
b) Trazas.
Las trazas del paraboloide elíptico con los planos coordenados se muestran en la siguiente tabla.
Intersección del paraboloide elíptico con los planos coordenados
Plano coordenado Ecuación de la traza
YZ : x = 0
XZ : y = 0
XY : z = 0
204
Cálculo II
y2
b
2
x2
a
2
x2
a2
= cz ⇒ z =
= cz ⇒ z =
+
y2
b2
=
0
y2
cb
2
x2
ca
2
Curva (traza)
Parábola en el plano
YZ
Parábola en el plano
XZ
Origen de coordenadas
La gráfica del paraboloide elíptico para c > 0 se muestra en
la figura 3.2.23a y para c < 0 en la figura 3.2.23b.
Z
c>0
Z
c<0
=
z z0 , z0 > 0
0
0
Y
Y
X
X
Fig. 3.2.23a
Fig. 3.2.23b
Observación 8
a) La ecuación de la forma
x2
a2
+
y2
b2
=
cz
se conoce como la ecuación canónica del paraboloide elíptico
de eje coincidente con el eje Z.
b) i) Si el eje del paraboloide es el eje X, su ecuación canónica es
y2
z2
+
= ax , b > 0 , c > 0 y a ≠ 0
b2 c 2
Z
z
V (0; 0; 0;)
X
x
Y
y
Fig. 3.2.24
ii) Si el eje del paraboloide elíptico es el eje Y, su ecuación
canónica es
x2
z2
+
= by , a > 0 , c > 0 y b ≠ 0
b2 c 2
Capítulo 3. Superficies
205
Z
z
V (0; 0; 0;)
y
Y
X
x
Fig. 3.2.25
a) La ecuación del paraboloide elíptico con vértice en el punto
V (h; k ; l) es
( x − h) 2 ( y − k ) 2
a2
+
= c ( z − l) , a > 0 , b > 0 y c ≠ 0
b2
y se conoce como la ecuación ordinaria del paraboloide elíptico. La recta que pasa por el vértice y es paralela al eje coordenado que corresponde a la variable de primer grado en la
ecuación se llama eje del paraboloide elíptico (figura 3.2.26).
Z
V ( h ; k ; l)
0
Y
X
Fig. 3.2.26
En forma similar, las ecuaciones ordinarias para los casos
de paraboloides elípticos con ejes paralelos o coincidentes
con los ejes X e Y , son respectivamente
( y − k ) 2 ( z − l) 2
b2
+
c2
( x − h) 2 ( z − l ) 2
a2
206
Cálculo II
+
c2
=a ( x − h) , a ≠ 0, b > 0, c > 0
=b ( y − k ) , a > 0, b ≠ 0, c > 0
Ejemplo 7
Para cada una de las siguientes superficies trace su gráfica e indique las coordenadas de su vértice
0
a) S : 8x 2 + 10 y 2 − 16x − 40 y − z + 49 =
0
b) S : 16 x 2 + 25z 2 − 64 x + 25 y − 150 z + 264 =
Solución
a) Al completar cuadrados en las variables x e y se obtiene la
ecuación
(x − 1)2 ( y − 2)2
10
+
8
1
= ( z − 1)
80
De acuerdo con la forma de la ecuación, la gráfica corresponde a un paraboloide elíptico con vértice en el punto
V (1; 2; 1) y con eje paralelo al eje Z.
Para trazar la gráfica del paraboloide elíptico se dibuja la
traza correspondiente al plano P1 : x = 1 (parábola) y la traza
con un plano perpendicular al eje del paraboloide, por ejemplo con el plano P2 : z = 5 (figura 3.2.27).
Z
V (1; 2; 1)
0
Y
X
Fig. 3.2.27
b) Al completar cuadrados en las variables x y z se obtiene la
ecuación
(x − 2)2 (z − 3)2
25
+
16
1
=
− ( y − 1)
16
De acuerdo con la forma de la ecuación, la gráfica corresponde a un paraboloide elíptico con vértice en el punto
V (2; 1; 3) y con eje paralelo al eje Y . El signo negativo de la
variable de primer grado de la ecuación indica que esta superficie se abre hacia la izquierda.
Capítulo 3. Superficies
207
Para trazar la gráfica del paraboloide elíptico se dibuja la
traza correspondiente al plano P1 : x = 2 (parábola) y la traza
con un plano perpendicular al eje del paraboloide, por ejemplo con el plano P2 : y = −3 (figura 3.2.28).
Z
V (2; 1; 3)
0
Y
X
Fig. 3.2.28
6.
Paraboloide hiperbólico
Una superficie cuádrica cuyos puntos ( x; y ; z) verifican una ecuación de la forma
y2
x2
−
= cz , a > 0, b > 0 y c ≠ 0
b2 a2
se denomina paraboloide hiperbólico con punto de ensilladura E en
el origen de coordenadas.
Para trazar la gráfica de esta superficie se determinan los puntos
de intersección con los ejes coordenados y sus trazas con los planos
paralelos a los planos coordenados.
a) Intersección con los ejes coordenados.
Los puntos de intersección del paraboloide hiperbólico con
los ejes coordenados se muestran en la siguiente tabla.
208
Cálculo II
Intersección
x
y
z
Punto de intersección
Con el eje X
0
0
0
E (0; 0; 0)
Con el eje Y
0
0
0
E (0; 0; 0)
Con el eje Z
0
0
0
E (0; 0; 0)
b) Trazas.
Las trazas del paraboloide hiperbólico con los planos coordenados se muestran en la siguiente tabla.
Intersección del paraboloide hiperbólico con los planos coordenados
Plano coordenado
Ecuación de la traza Curva (traza)
y2
YZ : x = 0
z=
XZ : y = 0
z= −
XY : z = 0
y= ±
cb
Parábola en el plano
YZ
2
x2
ca
Parábola en el plano
XZ
2
bx
a
Dos rectas en el plano
XY
La gráfica del paraboloide hiperbólico para c > 0 se muestra en la figura 3.2.29a y para c < 0 en la figura 3.2.29b.
c>0
Z
c<0
Z
0
Y
X
X
0
Y
Fig. 3.2.29a
Fig. 3.2.29b
Capítulo 3. Superficies
209
Observación 9
a) La ecuación del paraboloide hiperbólico con punto de ensilladura en el origen de coordenadas tiene la forma
y2
x2
−
= cz , a > b , b > 0 y c ≠ 0
b2 a2
y se conoce como la ecuación canónica del paraboloide hiperbólico.
b) La ecuación del paraboloide hiperbólico con punto de ensilladura en E (h; k ; l) es
( y − k ) 2 ( x − h) 2
b2
−
a2
=c ( z − l) , a > 0, b > 0 y c ≠ 0
y se conoce como la ecuación ordinaria del paraboloide
hiperbólico. La recta que pasa por el centro y es paralela
al eje coordenado que corresponde a la variable que tiene
grado 1 en la ecuación se llama eje del paraboloide hiperbólico
(figura 3.2.30).
Z
Z
c>0
c<0
E ( h ; k ; l)
E ( h ; k ; l)
0
Y
X
Y
X
Fig. 3.2.30
c) i) Si el eje del paraboloide hiperbólico es el eje X, su ecuación
canónica es
z2 y2
− = cx , b > 0, c > 0 y a ≠ 0
c2 b2
ii) Si el eje del paraboloide hiperbólico es el eje Y , su ecuación
canónica es
z2
x2
−
= by , a > 0 , c > 0 y b ≠ 0 .
c 2 a2
210
Cálculo II
Ejemplo 8
Dada la superficie
S : 9x 2 − 4 y 2 − 18x + 16 y − z − 6 =.
0
trace su gráfica e indique las coordenadas de su punto de
ensilladura.
Solución
Al completar cuadrados en las variables x e y se obtiene la
ecuación
(x − 1)2 ( y − 2)2
4
−
9
1
= ( z − 1) .
36
De acuerdo con la forma de la ecuación, la gráfica corresponde
un paraboloide hiperbólico con punto de ensilladura E (1; 2; 1) y
con eje paralelo al eje Z.
Para trazar la gráfica del paraboloide elíptico se dibuja la traza correspondiente al plano P1 : y = 2 (parábola) y luego se dibujan tres trazas con planos paralelos al plano Y Z, por ejemplo con
los planos P2 : x = −3 , P3 : x = 1 y P4 ; x = 5 (figura 3.2.31).
Z
E(1; 2; 1)
X
Y
Fig. 3.2.31
Capítulo 3. Superficies
211
Ejercicios y problemas resueltos 3.2
1.
En cada uno de los siguientes casos grafique el sólido limitado
por las superficies dadas
a) S1 : x 2 +
b) S1 :
y2 z2
1; S2 : z =
3; S3 : z =
−
=
−3
4
9
y 2 x2 z2
1; S2 : y =
6
−
−
=
−6; S3 : y =
9
4
4
c) S1 : z =16 − x 2 − y 2 ; S2 : z = x 2 + y 2 − 16
0
d) S1 : 100x 2 + 25y 2 − 4z 2 − 200x − 100 y + 24z + 164 =
S2 : z = 8; S3 : z = − 2
Solución
a) Según la forma de la ecuación, la superficie S1 corresponde
a un hiperboloide de una hoja con centro en el origen de
coordenadas C (0; 0; 0) y con eje coincidente con el eje Z.
Los denominadores de los términos positivos a2 = 1 y b2 = 4
son los cuadrados de las longitudes de los semiejes de la
elipse central, esto es a = 1 y b = 2.
Para trazar la gráfica del hiperboloide de una hoja se
dibuja su elipse central (traza con el plano XY) y por sus
vértices y covértices, se grafican las hipérbolas correspondientes a las trazas con los planos Y Z : x = 0 y XZ : y = 0
(figura 3.2.32).
Las superficies S2 y S3 son planos paralelos al plano XY
y limitan al sólido superior e inferiormente.
Z
X
S2
0
S1
S3
Fig. 3.2.32
212
Cálculo II
Y
b) La superficie S1 corresponde a un hiperboloide de dos hojas con centro en el origen de coordenadas C (0; 0; 0) y eje
coincidente con el eje Y , donde el denominador del término
positivo, b2 = 9 corresponde al cuadrado de la distancia del
centro al vértice de cada una de las dos hojas del hiperboloide
(b = 3) . Luego, los vértices del hiperboloide son V1 (0; −3; 0) y
V2 (0; 3; 0) (fig. 3.2.33).
son planos paralelos al plano XZ y
Las superficies S2 y
limitan al sólido por la izquierda y por la derecha.
Z
–3
0
3
X
6
Y
Fig. 3.2.33
c) Al escribir las ecuaciones de las superficies S1 y S2 en la forma ordinaria se tiene
S1 : x 2 + y 2 =
− ( z − 16) ; S2 : x 2 + y 2 =
z + 16
Z
Ambas superficies son paraboloides elípticos cuyos vértices son los puntos V1 (0; 0; 16) y V2 (0; 0; −16) respectivamente. El eje de ambas superficies coincide con el eje Z. Dado
que en la ecuación de S1 el coeficiente de z − 16 es c = −1, el
paraboloide se abre hacia abajo, mientras que en la ecuación
S2 el coeficiente de z + 16 es c = 1, por lo que el paraboloide se
abre hacia arriba (figura 3.2.34).
La intersección de los paraboloides se obtiene al resolver el
sistema de ecuaciones
16
X
Y
2
2
2
2
16
z =16 − x − y
x + y =
⇔
2
2
z = 0
z = x + y − 16
que corresponde a una circunferencia en el plano XY con
centro en el origen y radio de longitud 4u.
–16
Fig. 3.2.34
Capítulo 3. Superficies
213
d) Al completar cuadrados en las variables x, y, z en la ecuación
de S1 , se obtiene
(x − 1)2 +
( y − 2)2 (z − 3)2
4
−
25
0
=
De acuerdo con la forma de la ecuación, la gráfica corresponde a un cono elíptico con vértice en el punto V (1; 2; 3)
y eje paralelo al eje Z.
Para trazar la gráfica del cono elíptico se dibuja la traza
correspondiente al plano P1 : x = 1 (dos rectas que se cortan
en el vértice del cono) y las trazas con dos planos perpendiculares al eje del cono, por ejemplo S2 : z = 8 y S3 : z = −2
(figura 3.2.35).
Z
V (1; 2; 3)
0
X
Y
Fig. 3.2.35
2.
Trace las gráficas de las superficies cuyas ecuaciones son
x
a)=
y2 + z2
b) z = 1 − x 2 + y 2
1
c) z =
−
900 − 225x 2 − 36 y 2 + 3
10
d) y =
x2 + z 2 + 2x − 4z + 4
Solución
Como las ecuaciones dadas contienen una raíz cuadrada y
sus gráficas no se pueden identificar directamente, es conveniente elevar al cuadrado ambos miembros en cada ecuación
con el fin de eliminar el signo radical. La ecuación obtenida
es de segundo grado y se asocia con alguna de las superficies
214
Cálculo II
cuádricas presentadas. Luego, según el signo que antecede al
radical, se grafica la mitad de la superficie cuádrica que corresponda. Así, se tiene
a) x =
y 2 + z2 , x ≥ 0 ⇔ x2 = y 2 + z2 , x ≥ 0
⇔ x 2 − y 2 − z 2= 0, x ≥ 0
La gráfica de la ecuación x 2 − y 2 − z 2 =es un cono elíptico con vértice en el origen de coordenadas V (0; 0; 0) y eje
coincidente con el eje X . Como en la ecuación original el
signo que antecede al radical es positivo, la gráfica de esta
ecuación es la parte del cono donde x ≥ 0 (figura 3.2.36).
Z
0
X
Y
Fig. 3.2.36
Z
b) z = 1 − x 2 + y 2 , z ≥ 0 ⇔ z 2 =−
1 x2 + y 2 , z ≥ 0
⇔ x 2 − y 2 + z 2 = 1, z ≥ 0
La gráfica de la ecuación x 2 − y 2 + z 2 =
1 corresponde a un
hiperboloide de una hoja con centro en el origen de coordenadas C (0; 0; 0) y eje coincidente con el eje Y .
Además, como en la ecuación original el signo que antecede al radical es positivo, la gráfica es la parte del hiperboloide donde z ≥ 0 (figura 3.2.37).
c) z − 3 =−
Y
X
Fig. 3.2.37
1
900 − 225x 2 − 36 y 2 , z − 3 ≤ 0
10
2
⇔ 100 ( z − 3) = 900 − 225x 2 − 36 y 2 , z ≤ 3
2
x 2 y 2 ( z − 3)
⇔
+
+
= 1, z ≤ 3
4 25
9
La gráfica de la última ecuación corresponde a un
elipsoide con centro en el punto C (0; 0; 3) , donde los deno-­
minadores a2 = 4, b2 = 25 y c 2 = 9 corresponden a los
Capítulo 3. Superficies
215
cuadrados de los semiejes paralelos a los ejes coordenados,
a 2=
, b 5 y c = 3.
esto es=
Además, como en la ecuación original z − 3 es negativo,
su gráfica corresponde a la mitad del elipsoide donde z ≤ 3
(figura 3.2.38).
Z
3
0
Y
X
Fig. 3.2.38
x2 + z 2 + 2x − 4z + 4 , y ≥ 0
d) y =
⇔ y 2 = x2 + 2x + z 2 − 4z + 4, y ≥ 0
Z
2
2
⇔ ( x + 1) − y 2 + ( z − 2) = 1, y ≥ 0
2
C (−1; 0; 2)
X
2
1 corresLa gráfica de la ecuación ( x + 1) − y 2 + ( z − 2) =
ponde a un hiperboloide de una hoja con centro en el punto
C (−1; 0; 2) y eje paralelo al eje Y. Los denominadores de los
0
términos positivos a2 = 1 y c 2 = 1 corresponden al cuadrado del radio de la circunferencia central, esto es r = 1 .
Además, como en la ecuación original y ≥ 0 , la gráfica corresponde a la mitad del hiperboloide de una hoja, donde y ≥ 0
(figura 3.2.39).
Y
Fig. 3.2.39
3.
Dada la ecuación
x2 −
y2 z2
+
=a − 3
4
9
determine qué tipo de superficie se origina cuando
a) a = 3,
b) a > 3
y
c) a < 3
Solución
a) Al reemplazar a = 3 en la ecuación dada resulta
x2 −
216
Cálculo II
y2 z2
+
=
0
4
9
que corresponde a la ecuación de un cono elíptico con vértice en el origen de coordenadas V (0; 0; 0) y eje coincidente
con el eje Y .
b) Si a > 3 (a − 3 > 0) , se obtiene
x2 −
y2
z2
+
=
1
4 (a − 3) 9 (a − 3)
que corresponde a la ecuación de un hiperboloide de una
hoja con centro en el punto C (0; 0; 0) y eje coincidente con
el eje Y .
c) Si a < 3 (3 − a > 0) , la ecuación resultante es
−
y2
x2
z2
1
+
−
=
3 − a 4 (3 − a) 9 (3 − a)
que corresponde a la ecuación de un hiperboloide de dos
hojas con centro en el origen de coordenadas C (0; 0; 0) y
eje coincidente con el eje Y .
4.
Determine, según los valores de λ ∈ , el tipo de superficie cuádrica que corresponde a cada una de las siguientes
ecuaciones
2
6 x + 8z − λ
a) x 2 − 2 y 2 + 4 z=
(
)
b) 3x 2 + 2 y 2 + λ 2 − 4 z 2 − 6x + 12 y + 10 z + 16 =0
i) Para λ 2 − 4 =0
ii) Para λ 2 − 4 ≠ 0
c) 3λx 2 + 4 y 2 − 8x − 8y + λz =0
i) Para λ =0 ii) Para λ ≠ 0
Solución
a) Al completar cuadrados en las variables x, y, z se obtiene
(x − 3)2 − 2 y 2 + 4 (z − 1)2=
13 − λ ... (α)
= 0,
i) Si 13 − λ >
0, la ecuación representa a un cono elíptico con
vértice en el punto V (3; 0; 1) y eje paralelo al eje Y .
ii) Si 13 − λ > 0, la ecuación (α) , resulta
(x − 3)2
13 − λ
2
−
y2
(z − 1)
+
=
1
13 − λ 13 − λ
2
4
que corresponde a un hiperboloide de una hoja con centro en el punto C (3; 0; 1) y eje paralelo al eje Y .
Capítulo 3. Superficies
217
iii) Si 13 − λ < 0, la ecuación (α) resulta
(x − 3)2
2
y2
(z − 1)
−
+
−
=
1
λ − 13 λ − 13 λ − 13
2
4
que corresponde a un hiperboloide de dos hojas con centro en el punto C ( 3; 0; 1) y eje paralelo al eje Y .
b) i) Para λ 2 − 4 = 0 (λ = ± 2) , al completar cuadrados en la
ecuación dada, resulta
1
2
2
3 ( x − 1) + 2 ( y + 3) =
−10 z −
2
que corresponde a la ecuación de un paraboloide elíptico
con vértice en el punto V (1; −3; 1/ 2) y eje paralelo al eje
Z. Además, el paraboloide se abre hacia abajo.
ii) Si λ 2 − 4 ≠ 0, al completar cuadrados en la ecuación original se obtiene
(
)
2
5 λ2 + 1
5
3 ( x − 1) + 2 ( y + 3) + λ − 4 z + =
λ2 − 4
λ2 − 4
2
2
(
2
)
(β)
Así,
ii.1) Si λ 2 − 4 > 0 ( λ > 2 ó λ < −2 ) , la ecuación corres­
ponde a un elipsoide con centro en el punto
(
(
))
C 1; −3; −5 / λ 2 − 4 .
ii.2) Si λ 2 − 4 < 0 ( − 2 < λ < 2 ) , al multiplicar ambos
miembros de la ecuación ( β ) por −1, la ecuación
resultante corresponde a un hiperboloide de dos
(
(
)) y
hojas con centro en el punto C 1; −3; −5 / λ 2 − 4
eje paralelo al eje Z.
c) i) Si λ =0, la ecuación resultante es
1
2
4 ( y − 1) = 8 x +
2
que corresponde a un cilindro parabólico recto.
ii) Si λ ≠ 0, la ecuación resultante es
2
4
2
12λ + 16
3λ x − + 4 ( y − 1) = −λ z −
3λ
3λ 2
ii.1) Si λ <
> 0,
0, la ecuación representa un paraboloide elíptico con vértice en el punto
12λ + 16
4
V ; 1;
3λ
3λ 2
218
Cálculo II
ii.2) Si λ < 0, la ecuación representa un paraboloide
hiperbólico con punto de ensilladura
12λ + 16
4
E ; 1;
3λ
3λ 2
y eje paralelo al eje Z.
5.
Determine la ecuación de un cono elíptico que pasa por los
puntos D (4; 1; 5) y E (−1; 5; 5) , si se sabe que su vértice es el
punto V (−1; 1; 2) y que su eje es paralelo al eje Z. Luego bosqueje su gráfica
Solución
La ecuación ordinaria de un cono elíptico con vértice en el
punto V (−1; 1; 2) y eje paralelo al eje Z es de la forma
(x + 1)2 ( y − 1)2 (z − 2)2
+
a2
−
b2
c2
=
0
Al multiplicar ambos miembros de la ecuación por c 2
se tiene
c 2 ( x + 1)
a
2
2
(x + 1)
⇔
a
2
c
2
c 2 ( y − 1)
+
b
2
+
2
( y − 1)2
b
2
A
2
− ( z − 2) =
0
2
− ( z − 2) =
0
c2
(x + 1)2 ( y − 1)2
⇔
2
2
+
B
2
2
− ( z − 2) = 0 …. ( γ )
Como el punto D (4; 1; 5) pertenece al cono, entonces sus
coordenadas verifican la ecuación del cono ( γ ) , esto es
25
A
2
+ 0 − 32 = 0 ⇔ A 2 =
25
9
De manera similar, las coordenadas del punto E (−1; 5; 5)
satisfacen la ecuación del cono ( γ ) , es decir
0+
16
16
=9 ⇔ B2 =
9
B
2
Luego, la ecuación ordinaria del cono elíptico es
(x + 1)2 ( y − 1)2
25
9
+
16
9
2
− ( z − 2) =
0
Capítulo 3. Superficies
219
(x + 1)2 ( y − 1)2 (z − 2)2
ó
o
+
25
16
−
9
=
0
Un esbozo de la gráfica se muestra en la figura 3.2.40.
Z
V (−1; 1; 2)
Y
X
0
Fig. 3.2.40
6.
Determine la ecuación ordinaria de un hiperboloide de una
hoja con centro en el punto C (2; 4; 4) y eje paralelo al eje Y, si
se sabe que los puntos D (6; 4; 4) , E (7; 1; 4) y F (2; 4; 7) pertenecen al hiperboloide de una hoja.
Solución
La ecuación ordinaria de un hiperboloide de una hoja con centro en el punto C (2; 4; 4) y eje paralelo al eje Y es de la forma
(x − 2)2 ( y − 4)2 (z − 4)2
−
a2
b2
+
c2
=
1
Dado que el punto D (6; 4; 4) pertenece al hiperboloide de
una hoja, sus coordenadas verifican su ecuación, es decir
16
− 0 + 0 = 1 ⇔ a2 = 16
a2
De manera similar, las coordenadas de los puntos E ( 7; 1; 4 )
y F ( 2; 4; 7 ) verifican la ecuación del hiperboloide, esto es
25
a
2
−
9
b
2
=1 ∧
9
c2
=1
de donde
b2 = 16 ∧ c 2 = 9
Por lo tanto, la ecuación ordinaria del hiperboloide de
una hoja es
(x − 2)2 ( y − 4)2 (z − 4)2
16
220
Cálculo II
−
9
+
16
=
1
Ejercicios y problemas propuestos 3.2
1.
c) S1 : z =
Identifique y grafique cada una de las siguientes superficies. Además, indique su
centro, vértice o punto de ensilladura según
corresponda.
S2 : z =3 + 10 − x 2 − y 2 ;
S3 : z =−3 − 10 − x 2 − y 2
e) S1 : z = x 2 + y 2 − 4; S2 : y + z = 2
f) S1 : x 2 + z 2 =4; S2 : y =5 + 4 − x 2 − z 2
0
b) 4x 2 + 9 y 2 − 8x − 36 y − 36z − 68 =
S3 : y =−5 − 4 − x 2 − z 2
0
c) z 2 − 4x 2 − 9 y 2 − 2z + 8x + 18y − 48 =
0
d) 2x 2 + y 2 − z 2 − 4x + 4z − 2 =
e) x 2 + y 2 − z 2 − 2x − 4 y + 6z − 5 =
0
4.
determine el valor de λ para que la ecuación represente:
a) Un cono elíptico.
0
g) 4x 2 − 3y 2 + 6z 2 + 16 x − 18y − 24z − 59 =
h) 2 y 2 − x 2 + 4z 2 + 4x − 16 y − 32z + 76 =
0
2
Dada la ecuación
x2 + y 2 − z 2 − 2x − 2 y + 4z = λ + 3
0
f) 4x 2 + 4 y 2 + 4z 2 − 12x − 12z + 9 =
b) Un hiperboloide de una hoja.
c) Un hiperboloide de dos hojas.
2
0
i) 9z − 4 x − 36 y − 36z + 36 =
5.
a) z = 1 − x 2 + y 2
Determine según los valores de α ∈ , el tipo de superficie que corresponde a cada una
de las siguientes ecuaciones (ver ejercicio 4
en la sección anterior).
b) y =2 − x 2 − 2x − z 2 − 2z
a) x 2 + αy 2 + α3 z 2 − 4x + 4 y + 4 =0
Esboce la gráfica de cada una de las siguientes superficies.
c) x =1 + y 2 + ( z − 1)
2
b)
2
c) x 2 + α 2 y 2 + 2x + 2 y + (α − 2) z 2 − 3 =0
e) y =4 + 4z + 8x − x 2 − 32
6.
Determine la ecuación de un paraboloide
elíptico que pasa por los puntos A (2; 0; 3)
y B (−2; 1; 10) , si se sabe que su vértice es el
punto V (1; 1; 1) y su eje es paralelo al eje Z.
7.
Halle la ecuación de un hiperboloide de dos
hojas que pasa por los puntos A (1; 2; 4) ,
f) z =−5 − x 2 + y 2 − 6x − 4 y + 9
Grafique en cada caso el sólido limitado por
las superficies dadas.
a) S1 : z =x 2 + y 2 − 4; S2 : z =2 − x 2 + y 2
1; S2 : z =
−2
b) S1 : x 2 + y 2 − z 2 =
S3 : y + z =
3
(α2 − 9) x2 + 2y2 + z2 + 6x + 4y + 1 =0
2
d) z =2 − 5 − 3x − y + 6x + 2 y
3.
4 y 2 + 4x2
1;
d) S1 : x 2 + y 2 − z 2 =
0
a) x 2 + 2 y 2 − 3z 2 + 2 x − 12 y + 12 z + 7 =
2.
10 − x 2 − y 2 ; S2 : z =
(
)
B (3; 2; 2) y D 1; 5 − 1; 2 , si se sabe que
su centro es el punto C (1; −1; 2) y su eje es
paralelo al eje Y.
Capítulo 3. Superficies
221
3.3Revisión del capítulo
Los temas tratados en el capítulo se resumen en el siguiente
esquema.
Superficies
Superficies
cuádricas
Superficies
cilíndricas
Cilindros
rectos
Elipsoide
Hiperboloide
de una hoja
Hiperboloide
de dos hojas
Cono
elíptico
Paraboloide
elíptico
Paraboloide
hiperbólico
Ejercicios y problemas resueltos 3.3
1.
Grafique el cilindro recto cuya directriz es la curva
C : z = 4x e
− x2 / 8
y = 0
Solución
Para graficar el cilindro recto, primero se grafica la curva directriz en el plano XZ. En este caso, la curva C es la gráfica
de la función
=
z h=
( x) 4 x e − x
2
/8
Así, se tiene
–
Dom ( f ) =
– Asíntota horizontal: z = 0 (eje X ) , pues lim h ( x) = 0.
x →± ∞
–
h’ ( x=
)
(4 − x2 ) e − x /8 , de donde los números críticos de h
son x = –2 y x = 2.
222
Cálculo II
2
El diagrama de signos de h′ ( x) se muestra en la figura 3.3.1
Signo de h’(x)
–2
2
Fig. 3.3.1
(
)
Luego, el punto de mínimo relativo es A − 2; − 8e −1/ 2 y el
punto de máximo relativo es B 2; 8e −1/ 2 .
(
)
La gráfica de la curva directriz 𝒞 en el plano XZ
muestra en la figura 3.3.2.
( y = 0)
se
Y
y
(
B 2; 8e
12
).
–2
2
0
(
A − 2; − 8e −1/ 2
)
Fig. 3.3.2
Fig. 3.3.1
Según la observación 3, la ecuación del cilindro recto S coincide con la ecuación de la directriz, esto es
S : z = 4x e − x
2
/8
donde la variable y, que no aparece en la ecuación, toma cualquier valor real.
Como es un cilindro recto y la curva directriz está contenida en el plano XZ, su recta generatriz es paralela al eje Y,
de manera que la unión de todas las rectas paralelas al eje Y
que intersecan a la curva C , forman la superficie cilíndrica
(figura 3.3.3).
Z
Y
X
Fig. 3.3.3
Capítulo 3. Superficies
223
2.
Dada la superficie
S : 16 x 2 + y 2 + 4 z 2 − 96 x − 4 y − 40z + 232 =
0
trace su gráfica e indique las coordenadas de su centro y los
puntos de intersección con los ejes de simetría.
Solución
Al completar cuadrados en las variables x, y, z resulta
(x − 3)2 ( y − 2)2 (z − 5)2
1
+
16
+
4
=
1
De acuerdo con la forma de la ecuación, la gráfica corresponde a un elipsoide con centro en el punto C (3; 2; 5) , donde
los denominadores a2 = 1, b2 = 16 y c2 = 4 corresponden a los
cuadrados de las longitudes de los semiejes paralelos al eje X,
al eje Y y al eje Z respectivamente, esto es a = 1, b = 4 y c = 2.
Con estas longitudes se determinan los puntos de intersección del elipsoide con los ejes de simetría, como se muestra en
la siguiente tabla
Eje de simetría
paralelo al eje
Proceso
Puntos de intersección
X
Se suma y se resta A (3 + 1; 2; 5) =
A1 (4; 2; 5)
1
a = 1 a la abscisa
A2 (3 − 1; 2; 5) =
A2 (2; 2; 5)
del centro.
Y
Se suma y se resta B (3; 2 + 4; 5) =
B1 (3; 6; 5)
1
b = 4 a la ordenaB2 (3; 2 − 4; 5) = B2 (3; − 2; 5)
da del centro.
Z
Se suma y se resta C (3; 2; 5 + 2) =
C1 (3; 2; 7)
1
c = 2 a la cota del
C2 (3; 2; 5 − 2) =
C2 (3; 2; 3)
centro.
En la figura 3.3.4 se muestra la gráfica del elipsoide y sus
trazas con los planos P1 : x = 3, P2 : y = 2 y P3 : z = 5. Estas trazas pasan por los puntos de intersección del elipsoide con los
ejes de simetría.
224
Cálculo II
Z
0
X
Y
Fig. 3.3.4
3.
Dada la superficie
S : −4x 2 + 2 y 2 + z 2 − 24x − 12 y − 4z − 18 =
0
trace su gráfica e indique las coordenadas de su centro.
Solución
Al completar cuadrados en las variables x , y , z se obtiene
−
(x + 3)2 ( y − 3)2 (z − 2)2
1
+
+
2
4
=
1
De acuerdo con la forma de la ecuación, la gráfica corresponde a un hiperboloide de una hoja con centro en el punto
C (−3; 3; 2) y con eje paralelo al eje X , donde los denominadores de los términos positivos b2 = 2 y c 2 = 4 corresponden
a los cuadrados de las longitudes de los semiejes de la elipse
central, esto es b = 2 y c = 2 .
Para trazar la gráfica del hiperboloide de una hoja se dibuja
la elipse central y por sus vértices y covértices se trazan las hipérbolas correspondientes a las trazas con los planos P1 : y = 3
y P2 : z = 2 (figura 3.3.5).
Z
X
0
Y
Fig. 3.3.5
Capítulo 3. Superficies
225
4.
Dada la superficie
S : 4 x 2 − 9 y 2 − 18z 2 − 16 x − 54 y + 108z − 263 =
0
trace su gráfica e indique las coordenadas de su centro.
Solución
Al completar cuadrados en las variables x, y, z se obtiene
(x − 2)2 ( y + 3)2 (z − 3)2
9
−
4
−
=
1
2
Según la forma de la ecuación, la gráfica corresponde a un
hiperboloide de dos hojas con centro en el punto C (2; −3; 3) y
con eje paralelo al eje X, donde el denominador del término positivo a2 = 9 corresponde al cuadrado de la distancia del centro
al vértice de cada una de las dos hojas del hiperboloide.
Al sumar y restar a = 3 a la abscisa del centro se obtienen
las coordenadas de los vértices del hiperboloide de dos hojas.
Esto es, V1 (−1; −3; 3) y V2 (5; −3; 3) (figura 3.3.6).
Z
V1
3
a=
3
a=
V2
C (2; −3; 3)
0
X
5.
Fig. 3.3.6
Y
Dada la superficie
S : 16 x 2 − y 2 + 9z 2 − 32x + 6 y − 36z + 43 =
0
trace su gráfica e indique las coordenadas de su vértice.
Solución
Al completar cuadrados en las variables x, y, z resulta
(x − 1)2 ( y − 3)2 (z − 2)2
9
−
144
+
16
=
0
De acuerdo con la forma de la ecuación, la gráfica corresponde a un cono elíptico con vértice en el punto V (1; 3; 2) y
con eje paralelo al eje Y .
Para trazar la gráfica del cono elíptico se dibuja la traza correspondiente al plano P1 : x = 1 (dos rectas) y las trazas con
226
Cálculo II
dos planos perpendiculares al eje del cono, por ejemplo con los
planos P2 : y = −1 y P3 : y = 7 (figura 3.3.7).
Z
C(1; 3; 2)
0
X
Y
Fig. 3.3.7
6.
Dada la superficie
S : y 2 + 4 z 2 − 4 x − 6 y − 8z + 17 =
0
trace su gráfica e indique las coordenadas de su vértice.
Solución
Al completar cuadrados en las variables y y z se obtiene la
ecuación
( y − 3)2
4
2
+ ( z − 1) =x − 1
Según la forma de la ecuación, la gráfica corresponde a un
paraboloide elíptico con vértice en el punto V (1; 3; 1) y con eje
paralelo al eje X. Dado que el coeficiente de ( x − 1) es a = 1 > 0
a= 1 > 0 el paraboloide se abre hacia la parte positiva del eje X.
Para trazar la gráfica del paraboloide se dibuja la traza
correspondiente al plano P1 : y = 3 (parábola) y la traza con
un plano perpendicular al eje del paraboloide, por ejemplo
P2 : x = 5 (figura 3.3.8).
Z
V (1; 3; 1)
X
Y
Fig. 3.3.8
Capítulo 3. Superficies
227
7.
Dada la superficie
S : −25x 2 + 16 y 2 + 100x − 32 y − z − 81 =
0
trace su gráfica e indique las coordenadas de su punto de ensilladura.
Solución
Al completar cuadrados en las variables x e y se obtiene la
ecuación
(x − 2)2 ( y − 1)2
16
−
25
1
=
−
(z − 3)
400
De acuerdo con la forma de la ecuación, la gráfica corresponde a un paraboloide hiperbólico con punto de ensilladura
E (2;1; 3) y con eje paralelo al eje Z .
Para trazar la gráfica del paraboloide elíptico se dibuja
la traza correspondiente al plano P1 : x = 2 (parábola); luego se dibujan tres trazas con planos paralelos al plano XZ ,
por ejemplo con los planos P2 : y = −3 , P3 : y = 1 y P4 : y = 5
(figura 3.3.9).
z
Z
Y
x
X
y
Fig. 3.3.9
8.
Grafique en cada uno de los siguientes casos el sólido limitado
por las superficies dadas
0
a) S1 : 9x 2 + 4 y 2 − 9 z 2 − 36 x − 8y + 4 =
S2 : z =
− 4; S3 : z =
4
x2 y 2
x2 y 2
b) S1 : z = +
; S2 : z =
2−
+
4
9
4
9
+ y 2 4; =
S2 : z 0; S3 :=
y+z 3
c) S1 : x 2=
228
Cálculo II
Solución
a) Al completar cuadrados en las variables x , y , z en la ecuación de S1 se obtiene
(x − 2)2 ( y − 1)2
4
+
9
−
z2
=
1
4
De acuerdo con la forma de la ecuación, la gráfica corresponde a un hiperboloide de una hoja con centro en el
punto C (2; 1; 0) y eje paralelo al eje Z. Los denominadores
de los términos positivos a2 = 4 y b2 = 9 son los cuadrados
de las longitudes de los semiejes de la elipse central, esto es
a = 2 y b = 3.
Para trazar la gráfica del hiperboloide de una hoja se dibuja la elipse central (traza con el plano XY ) y por sus vértices se grafica la hipérbola correspondiente a la traza con el
plano P1 : x = 2 (figura 3.3.10).
Las superficies S2 y S3 son planos paralelos al plano XY
y limitan al sólido superior e inferiormente.
Z
Y
X
X
Fig. 3.3.10
x2 y 2
+
corresponde a una paraboloide
4
9
elíptico con vértice en el origen de coordenadas V (0; 0; 0)
y eje coincidente con el eje Z. Dado que el coeficiente de z es
c = 1 > 0 , el paraboloide se abre hacia arriba.
b) La superficie =
z
En la ecuación de la superficie
2−
S2 : z =
x2 y 2
+
4
9
al aislar el radical y elevar al cuadrado ambos miembros
se obtiene
Capítulo 3. Superficies
229
2
(z − 2)
⇔
2
x2 y 2
, z−2≤0
= −
+
4
9
x2 y 2
2
+
− ( z − 2) = 0, z ≤ 2
4
9
La gráfica de la ecuación corresponde a un cono elíptico
con vértice en el punto V (0; 0; 2) y eje coincidente con el eje
Z. Como z ≤ 2, la gráfica de S2 es la parte de cono desde el
vértice V hacia abajo.
La curva de intersección de las superficies S1 y S2 se obtiene al resolver el sistema de ecuaciones
x2 y 2
x2 y 2
+
z
=
+
1
=
4
9
C :
⇔ C : 4
9
2
2
y
x
z =1
+
2−
z =
4
9
La gráfica del sólido se muestra en la figura 3.3.11.
Z
2
0
Y
X
Fig. 3.3.11
c) La gráfica de la superficie S1 : x 2 + y 2 =
4 corresponde a un
cilindro circular recto cuya directriz es la circunferencia
4
x 2 + y 2 =
y su generatriz es el eje Z.
z = 0
C :
La superficie S2 : z = 0 es el plano XY, mientras que la
3 es un plano perpendicular al plano
superficie S3 : y + z =
YZ, como se muestra en la figura 3.3.12.
230
Cálculo II
Z
S3
S1
0
X
Y
S2
Fig. 3.3.12
9.
Dada la ecuación
9x 2 − 9 ( y − 1)
α2 −7
+ 4z 2 + 18x − 16z + 61 =
0
a) Determine el valor de α para que la ecuación represente un
hiperboloide de dos hojas con eje paralelo al eje Y .
b) Halle el valor de α para que la ecuación represente un paraboloide elíptico con eje paralelo al eje Y .
Solución
Al completar cuadrados en las variables x y z se obtiene
−
(x + 1)2 ( y − 1)α
+
4
4
2
−7
−
(z − 2)2
9
= 1 ……(∗)
a) La ecuación (*) representa un hiperboloide de dos hojas con
eje paralelo al eje Y, cuando
α 2 − 7 = 2 ⇔ α 2 = 9 ⇔ α = ±3
Por lo tanto, para α = ±3, la ecuación dada representa un
hiperboloide de dos hojas con centro en el punto C (−1; 1; 2)
y eje paralelo al eje Y.
b) La ecuación (*) representa un paraboloide elíptico cuando
α2 − 7 = 1 ⇔ α2 = 8 ⇔ α = ± 2 2
Así, al reemplazar α = ±2 2 en (*) se obtiene
(x + 1)2 (z − 2)2
4
+
9
1
=
( y − 5)
4
Por consiguiente, para α = ±2 2 la ecuación dada representa un paraboloide elíptico con vértice en el punto
V (−1; 5; 2) y eje paralelo al eje Y .
Capítulo 3. Superficies
231
Ejercicios y problemas propuestos 3.3
1.
− 16 − x 2 − y 2 ;
c) S1 : z =
S2 : x 2 + y 2 =
16;
Grafique en cada caso el cilindro recto cuya
directriz es la curva C.
z y8/ 3 − 4 y 2 / 3
=
a) C :
x=0
S3 : y + z =
6
4.
(
y =
π / 2 − arctan 1 − x 2
b) C :
z =1
3
a) x 2 + (α − 1) y 2 + (α − 2) z 2 = 9 − α 2
)
5
b) α 2 x 2 + (α − 1) z 2 + 8y − 4x =0
2
2.
determine en cada caso el tipo de superficie
que corresponde para cada valor de α ∈ .
5.
2
2
0
f) − 9x + 4 y + 36 x − 8 y − 72 z + 112 =
3.
Grafique en cada uno de los siguientes casos
el sólido limitado por las superficies dadas
4; S2 : y =
−1;
a) S1 : x 2 + z 2 =
S3 : y + z =
4
b) S1 : z =4 − x 2 − y 2 ; S2 : x 2 + y 2 =4;
S3 : z = − 4
232
Cálculo II
−2
− 36x − 50 y − 214 =
0
b) Halle el valor de α para que la ecuación
represente un paraboloide hiperbólico
con eje paralelo al eje Z.
0
b) x 2 − y 2 + 2z 2 − 2 x + 4 y − 12z + 11 =
0
e) x 2 + z 2 − 6x + 3y − 8z + 19 =
2
a) Determine el valor de α para que la
ecuación represente un hiperboloide de
una hoja con eje paralelo al eje Y .
0
a) 4x 2 + 36 y 2 + 9 z 2 − 8x − 144 y − 18z + 156 =
0
d) 9x 2 + 4 y 2 − z 2 − 18x − 16 y + 2z + 24 =
Dada la ecuación
9x 2 − 25y 2 + 25z α
Trace la gráfica para cada una de las siguientes superficies e indique las coordenadas de
su centro, vértice o punto de ensilladura según corresponda.
0
c) 3x 2 + 2 y 2 − 4z 2 − 6x − 8y + 16z + 7 =
2
c) 9 ( x − 2) − 25 ( y + 3) − αz 2 = α 4 − 4α 2
y
=
+ 2
z arcsen 2
c) C :
y + 4
x=0
x2 − x + 1
z = ln 2
d) C :
x + x + 1
y=0
Dadas las ecuaciones
6.
Responda las siguientes preguntas
a) Dada la superficie S : z = x 2 + y 2 + 4, ¿existe
la traza de S con el plano XY ?
b) ¿Cuál es la ecuación de una superficie
cuya traza con el plano XY es la siguiente
elipse?
x2 y 2
+
=
1
4
9
x2
z2
+ y2 −
=a − 4
4
9
¿Para qué valores de a, S es un hiperboloide de dos hojas?
c) Dada la superficie S :
d) ¿Para qué valores de a, la superficie
S:
x2
z2
+ y2 −
=a − 4
4
9
es un hiperboloide de una hoja?
e) ¿Cuál es el número natural a, para que la
superficie
S : (a − 1) x 2 + (a − 2) y 2 + (a − 4) z 2 =
1
sea un hiperboloide de una hoja cuyo eje
de simetría sea el eje Z?
f) Dada la superficie
S:
x2
z2
+ y2 −
=a − 4
4
9
¿para qué valores de a, S adopta las siguientes formas?
i) Cono elíptico.
ii) Hiperboloide de una hoja.
iii) Hiperboloide de dos hojas.
Capítulo 3. Superficies
233
Capítulo
4
Funciones reales
de varias variables
El estudio del comportamiento de algunas magnitudes variables en el campo de
la ingeniería requiere construir modelos
matemáticos que muestren la dependencia de una magnitud en términos de otras.
Esta relación se expresa mediante una función de varias variables.
Sabes
Capacidades necesarias:
ü Graficar curvas y regiones en el
plano.
ü Graficar cilindros rectos y superficies
cuádricas en el espacio.
ü Calcular el límite de una función.
Conocimientos previos
Piensas
Gráfica de curvas en el plano.
Gráfica de regiones en el plano.
Gráfica de cilindros rectos y superficies
cuádricas en el espacio.
Límite de una función real.
Habilidades por desarrollar:
ü Determinar analítica y gráficamente
el dominio de una función de dos o
tres variables reales.
ü Graficar funciones de dos variables
reales.
ü Determinar y graficar curvas y superficies de nivel.
ü Calcular el límite de una función de
dos variables.
ü Determinar la continuidad de una
Secciones
función de dos variables en un punto.
4.1 Funciones reales de varias variables
4.2 Límite y continuidad de una función
de dos variables reales
4.3 Revisión del capítulo
Haces
Competencias por alcanzar:
ü Resolver ejercicios y problemas
que involucren funciones de varias
variables.
En muchos casos, cuando varias variables intervienen en un proceso, es necesario buscar una relación entre ellas que permita expresar a una en términos de
las otras como en los siguientes ejemplos:
• La producción de maíz en el valle de Cañete depende de la cantidad de
hectáreas sembradas, del caudal de agua del río Cañete, de la cantidad de
fertilizantes usados, del control de la maleza, de la temperatura, etcétera.
• La utilidad de una empresa depende de los costos y del ingreso
por ventas.
• El área de una región rectangular depende de las longitudes de sus lados.
• La presión sanguínea de las personas depende de la edad, de la actividad
física que realizan, de la dieta, del estrés, etcétera.
• El índice de precios al consumidor depende de los precios de un grupo
de artículos.
• El volumen de un cono circular recto depende del radio de su base y de
su altura.
• El costo del tendido de un gasoducto depende de su longitud y del tipo
de terreno por donde pasa.
• El peso de una persona depende del número de calorías que ingiere y del
tiempo que dedica al ejercicio físico.
Estas relaciones se expresan mediante el concepto de funciones reales de
varias variables que se estudia en este capítulo. Asimismo, los conceptos de
dominio, rango, límites y continuidad tratados para funciones de una sola variable, se extienden aquí para funciones reales de varias variables.
El contenido de este capítulo sirve de base para los conceptos de derivada
e integral de una función de varias variables que serán tratados en los
siguientes capítulos.
236
Cálculo II
4.1 Funciones reales de varias variables
En muchas áreas del conocimiento se construyen modelos matemáticos que expresan mediante una ecuación la relación que existe entre magnitudes variables. Un caso particular de este tipo de relación
ocurre cuando una de estas magnitudes variables, llamada variable
dependiente, se expresa en términos de las otras magnitudes variables, llamadas variables independientes.
Por ejemplo, la producción P de maíz en un valle de la costa
peruana depende del área a cultivada, de la cantidad r de m3 de agua
disponible para el regadío y la cantidad k de kilos de fertilizantes
que se utilicen. Esta relación entre la variable dependiente P y las
variables independientes a, r, k se expresa como P = f (a; r ; k ) .
A continuación se presenta la formalización matemática de esta relación entre la variable dependiente y las variables independientes.
Función real de n variables reales
Una función real f de n variables es una correspondencia que
asigna a cada n-ada ( x1 ; …; xn ) de un subconjunto no vacío D de
R n , un único número real w denotado por f ( x1 ; …; xn ) , es decir
=
w f ( x1 ; …; xn )
En esta notación w es la variable dependiente y x1 ; …; xn son las
variables independientes.
Dominio de una función real de n variables reales
Toda función queda bien definida si se conocen la regla de
correspondencia y su dominio. Cuando el dominio no está dado se
asume que es el conjunto de todas las n-adas ( x1 ; …; xn ) de R n ,
para las cuales f ( x1 ; …; xn ) está definida, es decir
Dom (=
f)
{ ( x1 ; …; xn ) ∈ Rn
/ ∃w ∈ R∧ =
w f ( x1 ; …; xn )
}
Rango de una función real de n variables
El rango de f, que se denota por Ran ( f ) , está dado por
Ran ( f ) =
{ w ∈ R/ ∃(x1 ;…; xn ) ∈ Dom ( f ) ∧ w = f (x1 ;…; xn )}
Capítulo 4. Funciones reales de varias variables
237
Gráfica de una función real de n variables reales
La gráfica de f, que se denota por Graf ( f ) , está dada por
Graf ( f ) =
{ ( x1 ; …; xn ; w ) ∈ Rn+1 / w =
f ( x1 ; …; xn ) ∧ ( x1 ; …; xn ) ∈ Dom ( f )
}
Ejemplo 1
Los siguientes ejemplos muestran funciones reales de varias variables reales
d
y
a) El área A, la diagonal d y el perímetro P de una región rectangular, están en función de x e y, que representan las longitudes de la base y la altura respectivamente, esto es
=
A f=
(x; y) xy
=
d g ( x;=
y)
x
x2 + y 2 ,
=
P h ( x; y=
) 2x + 2 y
x
b) La capacidad V y el área total S de un cilindro circular recto
cerrado están en función de x e y, que representan las longitudes del radio de la base y la altura del cilindro, esto es
y
V = f ( x; y) = πx 2 y ,
S = g ( x; y) = 2πx 2 + 2πxy
R
A
B
c) La diferencia de potencial V en un conductor eléctrico entre
los puntos A y B depende de la intensidad de corriente I y la
resistencia R, mediante la ecuación
V = f ( I ; R)= I ⋅ R
I
Fig. 4.1.1
d) Si las resistencias R1 , … , Rn están conectadas en paralelo, la
resistencia equivalente R se obtiene a partir de la ecuación
1
1
1
=
+ …+
R R1
Rn
De donde, al despejar R, se obtiene
R = f ( R1 ; …; Rn ) =
1
1
1
+…+
R1
Rn
Observación 1
a) Para el caso de una función real f de dos variables independientes se tiene
z = f ( x; y )
donde z es la variable dependiente y x e y son las variables
independientes.
238
Cálculo II
Dom=
(f)
∧ z
{ (x; y) ∈ R2 / ∃z ∈ R=
Ran ( f ) =
{ z ∈ R/ ∃(x; y) ∈ Dom ( f ) ∧
Graf ( f=
)
{ (x; y; z) ∈ R3 / =z
}
f ( x; y ) ⊂ R 2
z = f ( x; y ) } ⊂ R
}
f ( x; y) , ( x; y) ∈ Dom ( f ) ⊂ R3
b) El Dom ( f ) es la proyección de la gráfica de f sobre el plano
XY y el rango es la proyección sobre el eje Z (figura 4.1.2).
zZ
S: z = f(x; y)
Ran( f )
0
Yy
x
X
Dom( f )
Fig. 4.1.2
c) Para que una superficie S sea la gráfica de una función real de
dos variables reales de la forma z = f ( x; y) , se debe cumplir
que “toda recta paralela al eje Z debe cortar a S en a lo más un
punto” ya que, de acuerdo con la definición de una función real
de dos variables reales, a cada par ordenado ( x; y) ∈ Dom ( f )
le corresponde un único z ∈ Ran ( f ) (figura 4.1.3).
zZ
S
((x;
x; yy;; zz))
0
( x; y ) (x; y)
Yy
Xx
Dom
( f f))
Dom(
Fig. 4.1.3
Por ejemplo, la superficie esférica S1 : x 2 + y 2 + z 2 =
4
(figura 4.1.4.a) no es gráfica de ninguna función real de dos
variables reales.
Sin embargo, la superficie S2 : z = 4 − x 2 − y 2 (parte superior de la esfera S1 ; figura 4.1.4.b) es la gráfica de la función
f ( x; y ) =
4 − x2 − y 2
Capítulo 4. Funciones reales de varias variables
239
Z
2
2
X
2
0
2
Y
Fig. 4.1.4a
X
2
Z
0
2 Y
Fig4.1.4b
Ejemplo 2
Dada la función f cuya regla de correspondencia es
f ( x; y ) = x 2 + y 2 + 1
determine su dominio, trace su gráfica e indique su rango.
Solución
Z
Dado que la regla de correspondencia está definida para cualquier par ordenado ( x; y) , se tiene
Dom ( f ) = R 2
La gráfica de f es la superficie
S : z = x2 + y 2 + 1
1
X
0
Fig. 4.1.5
Y
que corresponde al paraboloide circular de vértice (0; 0; 1) que
se muestra en la figura 4.1.5.
Dado que el rango de f es la proyección de S sobre el eje Z,
se tiene
Ran ( f=
) [1; + ∞ .
Observación 2
El dominio de una función real de dos variables reales se determina
de dos formas: analítica y gráfica.
La forma analítica es la expresión del dominio como un conjunto
de puntos de R 2 en el que se muestran las condiciones que lo definen.
La forma gráfica es la representación geométrica en el plano XY
de los puntos que pertenecen al dominio.
240
Cálculo II
Ejemplo 3
Determine en forma analítica y gráfica el domino de cada una de
las siguientes funciones, cuyas reglas de correspondencia son:
x2 + y 2
a) f ( x; y) =x 2 + 3xy + y 2
b)
g ( x; y ) =
y)
c) h ( x; =
d)
i ( x; y)= ln 4 − x 2 − y 2
y − x2
x2 − y 2
(
)
Solución
a) Dado que f ( x; y) =x 2 + 3xy + y 2 está definida para cualquier
par ordenado ( x; y) de R2, el dominio de la función f en su
forma analítica es
Dom ( f ) = R 2
y su representación gráfica es todo el plano XY , como se
muestra en la figura 4.1.6.
Y
4
2
–2
–4
0
2
4 X
–2
–4
Fig. 4.1.6
b) Como g ( x; y ) =
x2 + y 2
está definida para todos aquellos
x2 − y 2
pares ordenados ( x; y) de R 2 para los cuales x 2 − y 2 ≠ 0,
el dominio de la función g en su forma analítica es
{
Dom ( g) = ( x; y) ∈ R 2 / y 2 ≠ x 2
}
x2 }
{ ( x; y ) ∈ R 2 / y 2 =
=
R 2 − { ( x; y ) ∈ R 2 / y =
x ∨ y=
−x }
=
R2 −
y la gráfica de este conjunto se muestra en la figura 4.1.7
Capítulo 4. Funciones reales de varias variables
241
Y
Dom(g)
0
X
Fig. 4.1.7
c) Como h ( x; =
y)
y − x 2 está definida para todos los pares
ordenados ( x; y) de R 2 que verifican la condición y − x 2 ≥ 0 ,
el dominio de la función h en su forma analítica es
Dom ( h ) =
{ ( x; y ) ∈ R
2
/ y ≥ x2
}
y su gráfica se muestra en la figura 4.1.8.
Y
0
X
Fig. 4.1.8
(
)
d) Dado que i ( x; y)= ln 4 − x 2 − y 2 está definida para todos los
pares ordenados ( x; y) de R que verifican 4 − x 2 − y 2 > 0, el
dominio de la función i en su forma analítica es
2
Dom (=
i)
{ ( x; y ) ∈ R 2 / x 2 + y 2 < 4 }
La gráfica del dominio de la función i se muestra en la
figura 4.1.9.
242
Cálculo II
Y
2
Dom (=
i)
0
{ ( x; y ) ∈ R 2 / x 2 + y 2 < 4 }
2
X
Fig. 4.1.9
Ejemplo 4
Determine el dominio, trace la gráfica e indique el rango de cada
una de las funciones, cuyas reglas de correspondencia son
a) f ( x; y) =
b) g ( x; y) =2 + 9 − x 2 − y 2
x2 + y 2 + 1
Solución
a) i) El dominio de la función f es el conjunto
Dom ( =
f)
{ (x; y) ∈ R2 / x2 + y2 ≥ 0=}
ii) La gráfica de f es la superficie S : z =
R2
x2 + y 2 + 1
Para identificar la superficie S se aísla el radical y se
eleva al cuadrado, esto es
=
z
x 2 + y 2 + 1 ⇔ z −=
1
x2 + y 2
2
⇔ z − 1 ≥ 0 ∧ ( z − 1) = x 2 + y 2
⇔z ≥1
2
∧ x 2 + y 2 − ( z − 1) =
0 (cono circular)
Así, la gráfica de f corresponde a la parte del cono
circular en la que z ≥ 1, como se muestra en la figura 4.1.10.
S:z=
Z
x2 + y 2 + 1
1
0
X
Y
Fig. 4.1.10
Capítulo 4. Funciones reales de varias variables
243
iii) El rango de f, que es la proyección de la gráfica f sobre el eje
Z, es el intervalo
Ran ( f=
)
[ 1; +∞
b) i) El dominio de la función g es el conjunto
{ ( x; y ) ∈ R 2 / 9 − x 2 − y 2 ≥ 0 }
{ ( x; y ) ∈ R 2 / x 2 + y 2 ≤ 9 }
Dom (=
g)
=
ii) La gráfica de g es la superficie S : z =2 + 9 − x 2 − y 2
Para identificar la superficie S se aísla el radical y se
eleva al cuadrado, esto es
z =2 + 9 − x 2 − y 2 ⇔ z − 2 = 9 − x 2 − y 2
⇔ z−2≥0 ∧
⇔ z≥2
(z − 2)2 = 9 − x2 − y 2
2
∧ x 2 + y 2 + ( z − 2) =
9
Así, la gráfica de g es la parte de la superficie esférica de
centro (0; 0; 2) y radio 3 en la que z ≥ 2, como se muestra
en la figura 4.1.11.
Z
S : z =2 + 9 − x 2 − y 2
5
–2
0
X
Y
Fig. 4.1.11
iii) El rango de g, que es la proyección de su gráfica sobre el eje Z,
es el intervalo Ran ( g) = [ 2; 5] .
Curvas de nivel
Otra forma de representar geométricamente una función de dos variables es dibujar un mapa de contornos formado por un conjunto
de curvas que son las proyecciones de las trazas de la función con
planos paralelos al plano XY (figura 4.1.12).
244
Cálculo II
z
Z
X
Y
y
Mapa de contornos
0
x
Fig. 4.1.12
Las curvas que conforman el mapa de contornos se denominan
curvas de nivel. Así, si k ∈ Ran ( f ) , la curva de nivel de la función f
asociada a k es el conjunto
Ck =
k}
{ (x; y) ∈ Dom ( f ) / f (x; y) =
Ejemplo 5
Determine y trace las curvas de nivel de la función
f ( x; y=
) x2 + y 2 para k = 1; 4; 9.
Solución
Y
El dominio de la función f es Dom ( f ) = R 2 . Para la constante
k ≥ 0 , la curva de nivel de la función f asociada a k está dada por
C k : f ( x; y) =k ⇔ C k : x 2 + y 2 =k
Así, las curvas de nivel de f son circunferencias de centro
O (0; 0) y radio r = k , como se muestra en la figura 4.1.13.
Ejemplo 6
Determine la ecuación de la curva de nivel de la función f definida por
f ( x; y ) = x 2 + y 2 + 2 x − 2 y
k=9
k=4
k=1
0
1 2
3
X
Fig. 4.1.13
Y
que pasa por el punto A (2; 5) .
A(2; 5)
Solución
= k , la ecuación de la curva de nivel de f
Dado que f (2; 5=
) 23
que pasa por el punto A (2; 5) es
0
X
C k : f ( x; y) = x 2 + y 2 + 2x − 2 y = 23
2
2
C k : ( x + 1) + ( y − 1) =
25
que corresponde a la circunferencia de centro ( −1; 1) y radio 5
(figura 4.1.14).
Fig. 4.1.14
Capítulo 4. Funciones reales de varias variables
245
Observación 3
a) Para una función real f de tres variables reales independientes, su regla de correspondencia se expresa como
w = f ( x; y ; z)
donde w es la variable dependiente y x, y y z son las variables
independientes. Además, se tiene
Dom
=
(f)
∧w
{ (x; y; z) ∈ R3 / ∃ w∈ R=
}
f ( x; y ; z) ∈ R ⊂ R 3
Ran ( f ) =
f ( x; y; z) , ( x; y ; z) ∈ Dom ( f ) } ⊂ R
{ w ∈ R/ w =
Graf=
(f)
/w
{ ( x; y ; z ; w) ∈ R 4 =
}
f ( x; y ; z) , ( x; y ; z) ∈ Dom ( f ) ⊂ R 4
Dado que la gráfica de f está contenida en R no es posible
representarla geométricamente.
4
b) El dominio de una función real de tres variables reales se determina de dos formas, analítica y gráfica.
La forma analítica es la expresión del dominio como un
conjunto de puntos de R3 en el que se muestran las condiciones que lo definen.
La forma gráfica es la representación geométrica en el espacio R3 de los puntos que pertenecen al dominio.
Ejemplo 7
Determine en forma analítica y gráfica el dominio de cada una
de las siguientes funciones cuyas reglas de correspondencia son
a) f ( x; y ; z) =
4 − x2 − y 2 − z2
b) g ( x;=
y ; z) arcsen ( x + y + z) + x + y + z
Z
Solución
2
0
X
a) Dado que f ( x; y ; z) = 4 − x 2 − y 2 − z 2 debe ser un número
real, el dominio de la función f en su forma analítica es
{ ( x; y ; z) ∈ R 3 / 4 − x 2 − y 2 − z 2 ≥ 0 }
{ ( x; y ; z) ∈ R 3 / x 2 + y 2 + z 2 ≤ 4 }
Dom=
(f)
2 Y
=
Su gráfica se muestra en la figura 4.1.15.
Fig. 4.1.15
b) Para que g ( x;=
y ; z) arcsen ( x + y + z) + x + y + z sea un
número real, las condiciones que deben cumplir x, y y z son
−1 ≤ x + y + z ≤ 1, x ≥ 0 , y ≥ 0 y z ≥ 0
246
Cálculo II
Luego, el dominio de la función g en su forma analítica es
Dom
=
( g)
{ (x; y; z) ∈ R3 / x + y + z ≤ 1,
x ≥ 0, y ≥ 0, z ≥ 0
}
Su gráfica se muestra en la figura 4.1.16.
Z
1
0
1
Y
1
X
Fig. 4.1.16
Superficies de nivel
Como no es posible visualizar la gráfica de una función de tres variables en el espacio R3 , solamente se dibujan sus superficies de nivel
para describir geométricamente el comportamiento de la función.
Así, si k ∈ Ran ( f ) , la superficie de nivel de la función f asociada
a k es el conjunto
Sk =
k}
{(x; y; z) ∈ Dom ( f ) / f (x; y; z) =
Ejemplo 8
Determine y trace las superficies de nivel de la función
f ( x; y ; z) =z − x 2 − y 2
para k = 0; 1; 2
Z
Solución
z
El dominio de la función es Dom ( f ) = R3 . Para la constante k ∈ R ,
la superficie de nivel de la función f asociada a k está dada por
Sk : f ( x; y ; z) = k
⇔
2
k=2
2
Sk : z = x + y + k
k=1
Así, las superficies de nivel de f (figura 4.1.17) son los paraboloides circulares
2
2
z=
x +y ,
Sk : z = x 2 + y 2 + 1,
2
2
z = x + y + 2 ,
k=0
k=
0
k =1
k=2
x
X
0
Y
y
Fig. 4.1.17
Capítulo 4. Funciones reales de varias variables
247
Modelación con funciones reales de dos o más variables
En los siguientes ejemplos se presentan algunos modelos matemáticos que se expresan como funciones de varias variables.
1.
Una empresa fabrica dos tipos de memorias, de 4G y 8G.
El costo de producción por unidad de la memoria de 4G es
de S/ 2 y el de la de 8G es de S/ 3. El costo fijo mensual es de
S/ 6500.
a) Exprese el costo mensual C como una función de las cantidades x e y de unidades de memorias producidas en un mes
de 4G y 8G respectivamente.
b) Calcule el costo mensual de producir 10 000 memorias de
4G y 8000 memorias de 8G.
c) Si la empresa vende cada memoria de 4G en S/ 25 y cada memoria de 8G en S/ 20, halle la utilidad mensual U
como función de las cantidades x e y de unidades de memoria de 4G y 8G respectivamente producidas en un mes
(asuma que toda la producción es vendida).
Solución
En la siguiente tabla se muestran los datos del problema.
Unidades
producidas
Costo
Costo
mensual
Precio de
venta
Memorias de 4G
x
2
2x
25
Memorias de 8G
y
3
3y
20
a) El costo de producir x unidades de memoria de 4G e y
unidades de memoria 8G está dado por
C ( x; y) = 2x + 3y + 6500
=
=
000; y 8000, se tiene
b) Al evaluar la función costo
en x 10
C (10000; 8000
=
= 50500
) 2 (10000) + 3 (8000) + 6500
Luego, el costo de producir 10000 memorias de 4G y
8000 memorias de 8G es de S/ 50 500.
c) La utilidad U ( x; y) mensual por la venta de x unidades de
memoria de 4G e y unidades de memoria de 8G está dada por
U ( x; y) = Ingreso − costo =
= 23x + 17 y − 6500
248
Cálculo II
(25x + 20 y) − (2x + 3y + 6500)
2.
Una agencia aduanera debe renovar sus contenedores con la finalidad de atender la demanda que generará el tratado de libre
comercio con un país europeo. Para tal fin, los nuevos contenedores (que tienen la forma de un paralelepípedo rectangular)
deben tener una capacidad de 100 m3 . Exprese la cantidad de
material S (en metros cuadrados) que se requiere para construir cada contenedor en términos de las longitudes de los lados de la base.
Solución
Sean x e y el largo y ancho de la base y z la altura del contenedor tal como se muestra en la figura 4.1.18.
z
z
xx
y
y
Fig. 4.1.18
La cantidad de material S está dada por
S = 2 xy + 2 xz + 2 yz
Dado que la capacidad de cada contenedor es de 100 m3 se
tiene
V = xyz= 100 ⇒ z=
100
xy
Así, la cantidad de material en metros cuadrados que se requiere para construir cada contenedor es
100
100
200 200
S = 2 xy + 2 x
+
+ 2y
= 2 xy +
y
x
xy
xy
donde x > 0, y > 0.
Capítulo 4. Funciones reales de varias variables
249
Ejercicios y problemas resueltos 4.1
1.
Determine en forma analítica y gráfica el dominio de cada una
de las funciones cuyas reglas de correspondencia son
x + 2 + y + 4 − x2
=
a) z f=
( x; y )
(
z g ( x;=
y) arcsen
b)=
=
c) z h=
( x; y )
)
ln x 2 + y 2 − 1
(
)
x − 3 + ln ( 3 − y ) + 25 − x 2 − y 2
log2 ( xy) + cos
d)=
z i ( x;=
y)
e
2
2
x + y −1
x
4− y+x
+e
(
3
x−2
2
4− x − y
)
2
2y
−
2
x + y2 − 8
+3x arctan
(
4− y−x
)
Solución
El dominio de cada una de las funciones está formado por
el conjunto de pares ordenados de números reales ( x; y)
para los cuales la correspondiente variable dependiente z es
un número real.
x + 2 + y + 4 − x2
a) Dado que f ( x; y) =
(
)
ln x 2 + y 2 − 1
debe ser un número
real, el dominio de f está formado por todos los pares ordenados ( x; y) tales que
x + 2 ≥ 0, y + 4 − x2 ≥ 0, x2 + y 2 − 1 > 0 y x2 + y 2 − 1 ≠ 1
Luego, el dominio de la función f en su forma analítica, es
D=
f
{ (x; y) ∈ R3 / x ≥ −2 ∧ y ≥ x2 − 4 ∧ x2 + y2 > 1∧ x2 + y2 ≠ 2 }
Cada una de las condiciones que determinan el dominio tiene como representación geométrica un conjunto de
puntos ( x y) del plano, como se muestra en la figura 4.1.19.
Y
Y
4
Y
4
Y
2
2
2
2
–4
–2
0
–2
–4
x ≥ −2
2
4
X
0
–2
2
X
–2
–4
y≥
x2
Cálculo II
2
X
–4
–2
0
2
–2
–4
–4
x2 + y 2 > 1
Fig. 4.1.19
250
0
–2
x2 + y 2 ≠ 2
4X
Al intersecar las regiones que corresponden a cada una
de las condiciones se obtiene la gráfica del dominio de f
(figura 4.1.20).
Y
0
x = –2
X
–4
Fig. 4.1.20
b) El dominio de g en su forma analítica es
Dom=
( g)
=
=
{(x; y) ∈ R2 / −1 ≤ x − 3 ≤ 1 ∧ x − 3 ≥ 0 ∧ 3 − y > 0 ∧25 − x2 − y2 ≥ 0 }
{ (x; y) ∈ R2 / 0 ≤ x − 3 ≤ 1 ∧ y < 3 ∧ x2 + y2 ≤ 25 }
{ (x; y) ∈ R2 / 3 ≤ x ≤ 4 ∧ −3 < y < 3 ∧ x2 + y2 ≤ 25 }
Cada una de las condiciones que determinan el dominio
tienen las representaciones gráficas que se muestran en la
figura 4.1.21.
Y
Y
Y
5
3
0
=
{ ( x; y ) ∈ R
2
3
4
X
0
X
0
{
}
5
X
–5
–3 ( x;–3
=
y) <∈yR<2 3/ 3 ≤ x ≤ 4 ∧ −3 < y < 3 ∧ x 2 + y 2 ≤ 25
2
/ 3 ≤ x ≤ 4 ∧ −3 < y < 3 ∧ x + y ≤ 25
2
}
Fig. 4.1.21
Al intersecar las regiones que corresponden a cada una
de las desigualdades se obtiene la gráfica del dominio de g
(figura 4.1.22).
Capítulo 4. Funciones reales de varias variables
251
Y
5
3
0
3
4 5
X
–3
Fig. 4.1.22
c) El dominio de la función h en su forma analítica es
Dom=
( h)
=
{ (x; y) ∈ R2 / xy > 0 ∧ x2 + y2 − 1 ≥ 0 ∧ 4 − x2 − y2 ≥ 0 }
{ (x; y) ∈ R2 / xy > 0 ∧ x2 + y2 ≥ 1∧ x2 + y2 ≤ 4 } .
La representación gráfica del dominio de la función h se
muestra en la figura 4.1.23.
Y
Y
2
1
0
–2
X
–1
0
1
2
X
–1
–2
x > 0 ∧ y > 0
∨
xy > 0 ⇔
x < 0 ∧ y < 0
Fig. 4.1.24
Fig. 4.1.23
d) El dominio de la función i en su forma analítica es
Dom=
(i )
=
{ ( x ; y ) ∈ R 2 / 4 − y + x > 0 ∧ x 2 + y 2 − 8 > 0 ∧4 − y − x ≥ 0 }
{ ( x; y ) ∈ R 2 / − 4 < x + y < 4 ∧ x 2 + y 2 > 8 ∧ − 4 ≤ y − x ≤ 4 }
Al intersecar las regiones que corresponden a cada una
de las desigualdades se obtiene el gráfico del dominio que
se muestra en la figura 4.1.25.
252
Cálculo II
Y
4
–4
4
0
X
–4
Fig. 4.1.25
2.
Para cada una de las funciones cuyas reglas de correspon­
dencia son
a) z = f ( x; y) = y 2 − 2 y + 3
b) z =g ( x; y) =3 + 4x 2 + y 2 − 8x + 6 y + 9
c) z =
h ( x; y) =−
6
31 − 25x 2 − 16 y 2 + 150x − 96 y
d) =
z i ( x; y=
) 2 y 2 − x2 − 6 y + 10
i)
Determine el dominio en sus formas analítica y gráfica.
ii) Esboce la gráfica de la función.
iii) Halle el rango de la función.
Solución
a) i)
Como f ( x; y) = y 2 − 2 y + 3 está definida para todo par
( x; y) de R 2 , el dominio de f en su forma analítica es
Dom ( f ) = R 2
La gráfica del dominio corresponde a todo el plano
cartesiano (figura 4.1.26).
Y
Dom ( f ) = R 2
0
X
Fig. 4.1.26
Capítulo 4. Funciones reales de varias variables
253
z = f(x; y)
Z
Curva
directriz
0
x
ii) La gráfica de la función f es la superficie
z
X
Fig. 4.1.27
Y
2
S : z =( y − 1) + 2
Dado que la ecuación de S contiene solo dos va­
riables, la superficie corresponde a un cilindro recto
cuya directriz es la parábola en el plano YZ de vértice en
el punto (0; 1; 2) y cuya generatriz es paralela al eje X.
La gráfica de la función f se muestra en la figura 4.1.27.
y
iii) El rango de la función f es la proyección de su gráfica
sobre el eje Z, es decir
[2 ; + ∞
Ran ( f=
)
b) i)
El dominio de la función g en su forma analítica es
Dom=
( g)
{ ( x; y ) ∈ R 2
/ 4 x 2 + y 2 − 8x + 6 y + 9 ≥ 0
}
( y + 3)2
2
= ( x; y) ∈ R 2 / ( x − 1) +
≥ 1
4
La gráfica del dominio de g corresponde a la región exterior de la elipse
ε :(x − 1)2 + (
y + 3)
4
2
=
1
como se muestra en la figura 4.1.28.
Y
1
0
X
–3
Fig. 4.1.28
ii) La gráfica de la función g es la superficie
2
2
S : z =3 + 4 ( x − 1) + ( y + 3) − 4
Para identificar la superficie S se aísla el radical y se
eleva al cuadrado, esto es
z −=
3
254
Cálculo II
2
2
4 ( x − 1) + ( y + 3) − 4
2
2
2
⇔ ( z − 3) = 4 ( x − 1) + ( y + 3) − 4 ∧ z − 3 ≥ 0
2
⇔ ( x − 1) +
( y + 3)2 ( z − 3)2
−
4
4
= 1
∧ z≥3
Esta ecuación representa a un hiperboloide de una
hoja con centro en el punto Q (1; −3; 3) y eje paralelo
al eje Z.
Luego, como z ≥ 3, la gráfica de la función g es la
parte del hiperboloide de una hoja donde z ≥ 3 (desde
el plano z = 3 hacia arriba), como se muestra en la
figura 4.1.29.
Z
z
Q (1; −3; 3)
x
X
0
Y
y
Fig. 4.1.29
iii) Dado que el rango de la función g es la proyección de su
gráfica sobre el eje Z, se tiene
Ran ( =
f)
[ 3 ; +∞
c) z =
h ( x; y) =−
6
31 − 25x 2 − 16 y 2 + 150x − 96 y
i)
El dominio de la función h en su forma analítica es
Dom (h=
)
{ (x; y) ∈ R2 / 31 − 25x2 − 16 y2 + 150x − 96y ≥ 0 }
Y
(x − 3)2 ( y + 3)2
2
= ( x; y) ∈ R /
+
≤ 1
16
25
La gráfica del dominio de h corresponde a la parte
interior de la elipse
(x − 3)2 ( y + 3)2
ε :
16
+
25
=
1
3
–3
0
X
como se muestra en la figura 4.1.30.
Fig. 4.1.30
Capítulo 4. Funciones reales de varias variables
255
ii) La gráfica de la función h es la superficie
2
S : z − 6 =− 400 − 25 ( x − 3) − 16 ( y + 3)
2
Al elevar ambos miembros al cuadrado y realizar las
operaciones correspondientes, se obtiene
S:
(x − 3)2 ( y + 3)2 (z − 6)2
16
+
25
+
400
=1 ∧ z ≤ 6
Esta ecuación representa a un elipsoide con centro
en el punto Q (3; −3; 6) . Como z ≤ 6, la gráfica de la función h corresponde a la parte del elipsoide donde z ≤ 6
(desde el plano z = 6 hacia abajo), como se muestra en la
figura 4.1.31.
z
Z
Q(3; –3; 6)
0
Xx
y
Y
(3; –3; –14)
Fig. 4.1.31
iii) El rango de la función h es la proyección de su gráfica
sobre el eje Z, esto es
Ran (h) = [−14; 6]
d) z = i ( x) = 2 y 2 − x 2 − 6 y + 10
Y
6
i)
Dom (=
i)
4
=
2
–4
–2
0
El dominio de la función i en su forma analítica es
2
4
X
{ (x; y) ∈ 2 / y2 − x2 − 6y + 10 ≥ 0 }
{ ( x; y ) ∈
2
: x 2 − ( y − 3) =
1
como se muestra en la figura 4.1.32.
256
Cálculo II
}
La gráfica del dominio de i es la región comprendida
entre las dos ramas de la hipérbola
2
Fig. 4.1.32
2
/ x 2 − ( y − 3) ≤ 1
ii) La gráfica de la función i es la superficie
S : z= 2
( y − 3)2 − x2 + 1
Al elevar ambos miembros al cuadrado y realizar las
operaciones correspondientes, se obtiene
z2
=1 ∧ z ≥ 0
4
2
S : x 2 − ( y − 3) +
Esta ecuación representa a un hiperboloide de una
hoja con centro en el punto Q (0; 3; 0) y eje coincidente
con el eje Y. Luego, la gráfica de la función i es la parte
del hiperboloide de una hoja donde z ≥ 0 (desde el plano XY hacia arriba) como se muestra en la figura 4.1.33.
Z
x
z
X
Y
y
Fig. 4.1.33
iii) El rango de la función i es la proyección de su gráfica
sobre el eje Z, esto es
Ran (=
i)
3.
[ 0; +∞
Dadas la funciones f y g tales que
f ( x; y=
) 2 x 2 + y 2 + 5 3 g ( x; y ) − 4 , ( x; y ) ∈ R 2
si A (−1; 3) y B (6; 8) pertenecen a una misma curva de nivel
− 4 , calcule el valor de f (6; 8) .
de la función g y g (−1; 3) =
Solución
Sea C k la curva de nivel de la función g que pasa por los
puntos A (−1; 3) y B (6; 8) .
Como los valores de la función g en todos los puntos de una
misma curva de nivel C k son iguales, entonces
g (6; 8) =
g (−1; 3) =
−4
Luego, al reemplazar x = 6 e y = 8 en la regla de correspondencia de la función f , se tiene
Capítulo 4. Funciones reales de varias variables
257
f (6; 8=
) 2 62 + 82 + 5 3 g (6; 8) − 4
= 2 (10) + 5 3 − 4 −=
4 10
Por lo tanto, f (6; 8) = 10
4.
Y
20
P ( x; y )
d
Q (0; 0) . 20
X
En una placa de metal de forma circular de 20 cm de radio, la
temperatura (en ºC) en cualquier punto P ( x; y) de la placa es
inversamente proporcional a la distancia de P al punto fijo de
la placa Q (0; 0) .
Si las distancias se miden en centímetros y en el punto
A (3; 4) la temperatura es de 30亷
ºC, determine la ecuación de la
isoterma que pasa por el punto B (5; 12) . Una isoterma es una
curva formada por los puntos de la placa que tienen la misma
temperatura.
Solución
Si P ( x; y) es un punto cualquiera de la placa, la temperatura
Fig. 4.1.34
T ( x; y) en P es inversamente proporcional a la distancia
Nota
–
Dos magnitudes x e y son directamente proporcionales si
y = kx
donde k es la constante de proporcionalidad.
–
Dos magnitudes x e y son inversamente proporcionales si
k
x
donde k es la constante de propor-
y=
cionalidad.
entre P y Q (0; 0) , es decir existe una constante k, tal que
k
d ( P ; Q)
T ( x; y)=
k
T (3; 4) =
2
3 + 42
150
=
T ( x; y )
2
x +y
⇔
k = 150
2
, x 2 + y 2 ≤ 400
150
150
=
2
2
13
5 + 12
=
T (5; 12)
13
150
150
= Isoterma:
⇔ x 2 + y 2= 169
13
x +y
2
Fig. 4.1.35
Cálculo II
= 30
Luego, la temperatura en el punto P ( x; y) está dada por
20
X
Por lo tanto, la ecuación de la isoterma que pasa por B es la
C , es decir
curva de nivel donde la temperatura es (150 / 13) °ºC,
150
258
x + y2
Dado que en el punto A (3; 4) la temperatura es de 30亷
ºC,
se tiene
13
2
k
2
Así, la temperatura en el punto B (5; 12) está dada por
Y
20
0
⇔ T ( x; y)=
2
x +y
=
2
150
⇔ x 2 + y 2= 169
13
5.
En la planificación de un concierto de una mega estrella, los
organizadores estiman que si invierten x doláres en publicidad
radial e y doláres en publicidad en televisión el número de asistentes estará dado por
N ( x; y) = 0 ,1 x1/ 2 y
Si la entrada promedio se vende en $50 y la utilidad que
esperan obtener es el 10% del ingreso por ventas menos los gastos en publicidad:
a) Determine una función que exprese la utilidad U (en
dólares) de la empresa en términos de x e y.
b) Calcule la utilidad cuando se invierten $ 1600 en publicidad
radial y $ 10 000 en publicidad en televisión.
Solución
a) Si asisten N ( x; y) = 0,1 x1/ 2 y personas y cada una paga
en promedio $50, el ingreso por venta de entradas está
dado por
=
I ( x; y )
(0=
,1x1/ 2 y ) (50)
5 x1/ 2 y
Luego, la utilidad (en dólares) de la empresa es
=
U ( x; y) 10 % de
=
(5 x1/ 2 y) − (x + y)
10
5 x1/ 2 y −=
x − y 0 , 5 x1/ 2 y − x − y
100
(
)
b) Para x = 1600; y = 10 000, se obtiene
1/ 2
U=
(1600;10 000) 0, 5 (1600)
(10 000) − 1600 − 10 000
= 188 400 (dólares)
6.
Para construir una ventana se acopla a un rectángulo de 2x
metros de base e y metros de altura un triángulo isósceles de
base 2x metros (figura 4.1.36).
(
h
α.
)
Si la ventana tiene un perímetro de 4 2 + 3 metros:
x
a) Exprese el área de la ventana en función de x y α.
b) Calcule el área de la ventana para α = π / 6 y x = 2 m.
Solución
y
2x
Fig. 4.1.36
a) Sean l la longitud de cada uno de los lados congruentes del
triángulo isósceles y h la longitud de su altura relativa al
lado no congruente.
Capítulo 4. Funciones reales de varias variables
259
l
l
h
α=π/6
x
Fig. 4.1.37
Del triángulo isósceles se obtiene
=
h x tan α =
y l x sec α
Luego, el perímetro de la ventana, el área del triángulo y
el área del rectángulo son respectivamente
P = 2x + 2 y + 2l = 2x + 2 y + 2x sec α
=
A∆
1
(2x=
)(h) x2 tan α
2
A = 2xy
(
)
Como el perímetro del pentágono es 4 2 + 3 , se tiene
(
)
2 x + 2 y + 2 x sec α = 4 2 + 3 ⇒ y = 4 + 2 3 − x − x sec α
Por consiguiente, el área de la ventana en función de
α y x es
(
A (α; x=
x 2tan α + 2x 4 + 2 3 − x − x sec α
) A∆ + A=
)
b) Para α = π / 6rad y x = 2 m, el área de la ventana es
π
π
A = 4 tan + 2 (2) 4 + 2 3 − 2 − 2 sec = 8 + 4 3
6
6
Por lo tanto, el área de la ventana para α = π / 6rad y
(
)
x = 2m es 8 + 4 3 m2 ≈ 14, 928 m2 .
260
Cálculo II
nivel de la función f que pasa por el punto
Ejercicios y problemas propuestos 4.1
1.
A (3; 4) .
Determine en forma analítica y gráfica el
dominio de cada una de las funciones cuyas
reglas de correspondencia son
a) f =
( x; y )
e
3 x3 + y 3 + 8
y−x−3
(
+ ln 9 − x 2 − y 2
b) g=
(x; y) arccos ( y − 4 ) +
3
4.
)
ln (5 − x )
2
; y) log ( x − 1) − y + 4 ,
b) g ( x=
k=
−1, k =
0, k =
1
)
z + 4 − x2 − y 2 − z
y
e) l ( x; y ; z) = ln
xz
2.
c) h ( x;=
y) 2
5.
(x −1)2 +( y −1)2
ln 2
,=
k 1=
, k e=
, k e4
Sea f una función tal que
2
2
f ( x; y ; z) =( x − 1) + ( y − 1) + ( z − 1)
a) z = f ( x; y) =4 + x − 3
6.
Para trasladar carga internacional se usa un
contenedor que tiene la forma de un paralelepípedo rectangular recto cuya capacidad
es de 12 m3. Si en su construcción se gastan
$5 por cada m2 de base y techo y $4 por
cada m2 de la parte lateral del contenedor,
exprese el costo de construcción del contenedor en función de las dimensiones de la base.
7.
Una ventana tiene forma rectangular y sobre el lado paralelo a la base tiene un semicírculo cuyo diámetro coincide con la longitud de dicho lado (figura 4.1.38).
b) z =
g ( x; y) =+
5
4 y − 9x − 36
2
2
c) z = h ( x; y)
1
31 − 25x 2 − 16 y 2 + 150x + 96 y
2
d) z = j ( x; y)
1 2
y − 9x 2 − 6 y + 36x + 9
2
Determine el dominio en sus formas
analítica y gráfica.
2
Grafique la superficie de nivel de la función f que pasa por el punto A (2; 3; 3) .
Para cada una de las funciones cuyas reglas
de correspondencia son
=
3−
2
4 − ( x − 2) + 9 ( y − 3) ,
=
k 2=
, k 3=
,k 6
x2 + y 2
arcsen
16
− ln x 2 + y 2 − 4
=
c) h ( x; y)
2
2
x −y
d) k ( x; y; z) =
2
a) f ( x; y) =
x −3
(
Dibuje un mapa de contornos de acuerdo
con los valores indicados para cada una de
las funciones cuyas reglas de correspondencia son
=4 −
i)
ii) Esboce la gráfica de la función.
iii) Determine el rango de la función.
3.
Sea f una función tal que
f ( x;=
y)
/
x 2
x2 + y 2
Determine los puntos de intersección de
0 con la curva de
la recta L : 2x − y + 2 =
y
x
Fig. 4.1.38
Capítulo 4. Funciones reales de varias variables
261
a) Exprese el perímetro de la ventana en función de las dimensiones del rectángulo.
Si el costo de un metro de gasoducto es
de $ 800 en el tramo AQ y de $ 500 en el
tramo QB, exprese el costo de construcción
del tramo AQB del gaseoducto en función
de x e y.
b) Determine el área de la ventana en función de las dimensiones del rectángulo.
8.
Una empresa comercializadora de gas natural desea construir un gasoducto para trasladar gas desde el punto de extracción hasta
la planta comercializadora. En cierto tramo
el gasoducto debe cruzar un río desde el
punto A hasta el punto B, como se muestra
en la figura 4.1.39 (considere que los segmentos AQ y QB están en un mismo plano).
A
30 m
Q
B
y
Fig. 4.1.39
262
Cálculo II
x
9.
En un trapecio isósceles las longitudes de las
bases son B y b metros, mientras que α es
la medida del ángulo que forma la base mayor con el lado no paralelo. Exprese el área
del trapecio en función de B, b, y α.
4.2Límite y continuidad de una función
de dos variables reales
En esta sección las nociones de límite y continuidad para funciones
de dos variables reales se abordan a partir de la noción de acercamiento o proximidad a un punto. Así, para precisar la idea intuitiva
de límite de una función de dos variables se analiza la siguiente
situación: suponga que tiene un terreno plano limitado por un
rectángulo cuyas medidas son aproximadamente 3km de largo
y 2 km de ancho.
Se desea conocer el valor aproximado del área del terreno, para
lo cual se calculan valores del área del terreno para valores del largo
y del ancho cercanos a 3km y 2 km respectivamente, como se muestra en la siguiente tabla.
Valores del área del terreno: A = xy
y
x
2,900
1,900
1,990
1,999
2,000
2,001
2,010
2,100
5,771
5,771
5,797
5,800
5,803
5,829
6,090
2,990
5,681
5,950
5,977
5,980
5,983
6,010
6,279
2,999
5,698
5,968
5,995
5,998
6,001
6,028
6,298
3,000
5,700
5,970
5,997
6,000
6,003
6,030
6,300
3,001
5,702
5,972
5,999
6,002
6,005
6,032
6,302
3,010
5,719
5,990
6,017
6,020
6,023
6,050
6,321
3,100
5,890
6,169
6,197
6,200
6,203
6,231
6,510
Según los valores de la tabla se observa que cuando el largo se
aproxima a 3km , para valores de x menores o mayores a 3 y el ancho se aproxima a 2 km para valores de y menores o mayores a 2, el
área A del terreno se aproxima a 6 km2 .
Este comportamiento se expresa en forma simbólica como
=
lim A
(x ; y)→(3; 2)
=
lim xy 6
(x ; y)→(3; 2)
Vecindad de un punto en R 2
Sean P0 ( x0 y0 ) ∈
y r un número real positivo. Una vecindad
abierta con centro en P0 y radio r es el conjunto
{
B ( P0 ; r ) =
P ( x; y) ∈ R 2 / d ( P; P0 ) < r
}
que también se puede expresar como
Capítulo 4. Funciones reales de varias variables
263
B ( P=
0 ; r)
=
{ P ( x; y ) ∈ R /
<r
}
/ ( x − x0 ) + ( y − y0 ) < r 2
}
2
{ P ( x; y ) ∈ R
2
(x − x0 )2 + ( y − y0 )2
2
2
yY
r
r
yy00
xx00
0
Xx
Fig. 4.2.1
Gráficamente, la vecindad de P0 se representa mediante un
círculo de centro P0 y radio r. La frontera del círculo no está incluida.
Punto de acumulación
Un punto P0 ( x0 ; y0 ) ∈ R 2 es un punto de acumulación del conjunto
D ⊂ R 2 , si toda vecindad con centro en P0 contiene por lo menos
un punto de D diferente de P0 (figura 4.2.2).
Y
B(P0; r)
y0
0
Y
y0
D
B(P0 ; r)
D
x0
X
0
x0
X
Fig. 4.2.2
El punto de acumulación P0 ( x0 ; y0 ) puede pertenecer o no al
conjunto D.
En forma general, el significado intuitivo de límite es
Definición 1
Sean f una función de dos variables con Dom ( f ) ⊂ R 2 , ( x0 ; y0 ) un
punto de acumulación del dominio de f y L un número real.
264
Cálculo II
El límite de la función f cuando ( x; y) se aproxima al punto
(x0 ; y0 ) es el número L y se escribe
f ( x; y ) = L
lim
(x ; y)→( x0 ; y0 )
si los valores de f ( x; y) se aproximan al número L, cuando los puntos ( x; y) del dominio de f se acercan al punto ( x0 ; y0 ) siguiendo
una trayectoria de aproximación cualquiera C (figura 4.2.3).
Zz
Una curva C es una trayectoria de
aproximación al punto ( x0 ; y0 ) si
toda vecindad de ( x0 ; y0 ) contiene
infinitos puntos de la curva C diferentes de ( x0 ; y0 ) (figura 4.2.4).
Y
B(P0; r)
L
y0
y0
0
x
C
x0
0
Yy
x0
X
Fig. 4.2.4
X
Fig. 4.2.2
Fig. 4.2.3
Trayectorias de aproximación y existencia del límite
En las funciones de una sola variable independiente
se tiene
=
L lim f ( x) existe=
⇔L
x → x0
lim=
f ( x)
x → x0−
(y =
f ( x) )
lim f ( x)
x → x0+
Esto es, los límites laterales son iguales. Sin embargo, para el límite de una función de dos variables el número de trayectorias de
aproximación al punto ( x0 ; y0 ) es infinito. Así, se tiene
a)
lim
(x ; y)→(x0 ; y0 )
f ( x; y) existe, si para cualquier trayectoria de apro-
ximación C al punto ( x0 ; y0 ) el valor del límite es el mismo.
b) Si existen dos trayectorias de aproximación al punto ( x0 ; y0 )
para las cuales los límites son distintos, entonces el límite de
f ( x; y) no existe.
Es decir, si C1 y C2 son trayectorias de aproximación al
punto ( x0 ; y0 ) , tales que
lim
( x ; y)→( x0 ; y0 )
f ( x; y) = L1 ≠ L2 =
((x; y) ∈ C1 )
entonces
lim
(x ; y)→( x0 ; y0 )
lim
( x ; y)→( x0 ; y0 )
f ( x; y )
( x; y ) ∈ C 2
f ( x; y) no existe
Capítulo 4. Funciones reales de varias variables
265
Cálculo de límites para funciones reales de dos variables
Para el cálculo del límite de una función de dos variables se utilizan las extensiones de los teoremas 2 y 3 de la sección 2.1 del libro
Cálculo I, es decir que el límite de una suma es la suma de los límites,
el límite de una constante es la misma constante y así sucesivamente.
El cálculo de los límites de las formas indeterminadas (0 / 0) o
(∞ / ∞) se resuelve mediante un procedimiento algebraico o un
cambio de variable.
Ejemplo 1
Calcule los siguientes límites
a)
x2 − y 2 + 6
(x ; y)→(0; 2) 3x + y
lim
Solución
a) Dado que
lim
(x ; y)→(0; 2)
lim
( x ; y)→(0; 2)
x3 y3 − 27
(x ; y)→(1;3) xy − 3
b)
lim
(x2 − y2 + 6) =
(3x + y=) 3 (0) + 2=
02 − 22 + 6 = 2 y
2 , el límite del cociente es
x2 − y 2 + 6 2
= = 1
(x ; y)→(0; 2) 3x + y 2
lim
b)
(
)
lim =
x3 y3 − 27 0 y
(x ; y)→(1;3)
lim
=
(xy − 3) 0,
(x ; y)→(1;3)
x3 y3 − 27
es de la forma indeterminada (0 / 0) .
(x ; y)→(1;3) xy − 3
lim
En este caso, para salvar la indeterminación se factoriza el
numerador de manera que uno de sus factores sea ( xy − 3) ,
que origina la indeterminación, y luego se cancela, esto es
L=
=
(xy − 3) (x2 y 2 + 3xy + 9)
lim
(x ; y)→(1;3)
lim
( x ; y)→(1;3)
xy − 3
+ 3xy + 9)
(x2 y 2=
27
Ejemplo 2
Verifique que
lim
y2
( x ; y)→(0; 0) 4 x 2 + 4 y 2
no existe
Solución
Como el límite dado es de la forma indeterminada (0 / 0) , para
verificar que no existe se buscan dos trayectorias de aproximación
266
Cálculo II
C1 y C2 al punto (0; 0) , de tal manera que los límites calculados
a través de estas trayectorias, sean diferentes. Así, para las curvas
{
C2 ={( x; y) ∈ R 2
}
C1 =
0
Eje X
(x; y) ∈ R 2 / y ==
/ y =x
}
se tiene
=
L1
=
L2
lim
f ( x=
; y) lim f ( x=
; 0) lim
lim
; x) lim
f (=
x; y) lim f ( x=
(x ; y)→(0;0)
( x ; y)∈1
(x ; y)→(0;0)
( x ; y)∈2
x →0
x →0
02
=
lim
=
0 0
2
x →0
4x 2 + 4 (0)
x2
1 1
=
lim
=
2
2
x →0 4 x + 4 x
x →0 8
8
x →0
Como L1 ≠ L2 , se concluye que
y2
lim
no existe.
(x ; y)→(0; 0) 4 x 2 + 4 y 2
Ejemplo 3
Calcule los siguientes límites
a)
b)
c)
arctan (4x + 4 y) − ( x + y)
lim
3
ln ( x + y + 1) − ( x + y)
(x ; y)→(0;0)
(
)
x3 + y3 − ln x3 + y3 + 1
lim
2
(x ; y)→(1; −1)
lim
2
(
3
sen x + y
3
)
xy − 1
(x ; y) → (1;1)
2
x y + 2 xy + y − xy 2 + x + 2
Solución
a) Dado que la indeterminación de la forma (0 / 0) no se puede
salvar mediante un proceso de factorización y la función contiene la expresión común ( x + y) tanto en el numerador como
en el denominador, se hace el cambio de variable u= x + y en Nota
el que u → 0 cuando ( x; y) → (0; 0) . Así, se tiene
Si
4
′H
L
− 2u
arctan (4u) − u2
0
1 + 16u2
4
lim
=
=
u→ 0 1
u→0 ln (u + 1) − u3
0
2
− 3u
u +1
L lim
=
lim
(x ; y)→( x0 ; y0 )
entonces
g ( x; y) = a y lim f (u) = L ,
u→ a
lim
(x ; y)→(x0 ; y0 )
f ( g ( x; y)) = L
Por consiguiente, de acuerdo con la nota adjunta, se tiene
lim
(x ; y)→(0;0)
ln
arctan (4x + 4 y) − ( x + y)
3
ln ( x + y + 1) − ( x + y)
2
= L= 4
Capítulo 4. Funciones reales de varias variables
267
b) Como la indeterminación de la forma (0 / 0) no se puede salvar mediante un proceso de factorización y la función contiene la expresión común ( x3 + y3 ) tanto en el numerador como
u x3 + y 3
en el denominador, se hace el cambio de variable =
en el que u → 0 cuando ( x; y) → (1; −1) . Así, se tiene
1
L′H
1−
u − ln (u + 1)
u +1
=
=
L lim
lim
u→ 0
u→0 2 senucosu
sen2 u
1
1 L′H
1−
(u + 1)2 1
u + 1 lim
= lim
=
=
u→0 sen ( 2u)
u→0 2cos ( 2u)
2
Por lo tanto,
(
)=1
x3 + y3 − ln x3 + y3 + 1
lim
(x ; y)→(1; −1)
2
(
3
sen x + y
3
)
2
c) Dado que la indeterminación es de la forma ( 0 / 0 ) , para salvar la indeterminación se multiplican el numerador y el denominador por la conjugada del denominador, es decir
L=
=
lim
(x ; y)→(1;1)
lim
(x ; y)→(1;1)
(
(xy − 1) (
x 2 y + 2 xy + y + xy 2 + x + 2
x 2 y + 2xy + y − xy 2 + x + 2
(xy − 1) (
x 2 y + 2 xy + y + xy 2 + x + 2
x 2 y + 2 xy + y + xy 2 + x + 2
(x y + 2xy + y) − (xy
2
)(
2
)
)
+x+2
(xy − 1) ( x2 y + 2xy + y + xy 2 + x + 2 )
= lim
(x ; y)→(1;1)
x ( xy − 1) + 2 ( xy − 1) − y ( xy − 1)
=
=
lim
(xy − 1) (
(x ; y)→(1;1)
x 2 y + 2 xy + y + xy 2 + x + 2
(xy − 1) [x + 2 − y]
)
x 2 y + 2xy + y + xy 2 + x + 2
lim
=
2
(x ; y)→(1;1)
x+2−y
Por lo tanto,
lim
xy − 1
(x ; y) → (1;1) x 2 y + 2 xy + y − xy 2 + x + 2
268
Cálculo II
)
=2
)
Continuidad de una función de dos variables en un punto
La continuidad de una función real de una variable real, en términos gráficos, implica una curva de trazo continuo sin saltos ni huecos. Esta noción se extiende a una función de dos variables como
una superficie sin huecos ni saltos.
Definición 2
Sea f una función real de dos variables reales con Dom ( f ) ⊂ R 2 y
sea ( x0 ; y0 ) un punto de acumulación del Dom ( f ) .
La función f es continua en ( x0 ; y0 ) si cumple las siguientes condiciones
a)
( x0 ; y0 ) ∈ Dom ( f )
b) Existe
c)
lim
(x ; y)→(x0 ; y0 )
lim
( x ; y)→( x0 ; y0 )
f ( x; y ) = L
f ( x; y)= L= f ( x0 ; y0 )
Si alguna de estas condiciones no se cumple se dice que f es
discontinua en ( x0 ; y0 ) .
Si una función f es continua en todos los puntos de un conjunto
A ⊂ R 2 , se dice que f es continua en el conjunto A.
Ejemplo 4
La función constante f definida por f ( x; y) = −10 es continua en
cualquier punto ( x0 ; y0 ) ∈ R 2 pues se cumple
lim
(x ; y) → (x0 ; y0 )
f ( x; y) = lim
( x ; y) → (x0 ; y0 )
−10 =
f ( x0 ; y0 )
(−10) =
Ejemplo 5
La función f definida por
f ( x; y=
) 5x2 y 2 − 3xy + 4x − 2 y
es continua en todo punto ( x0 ; y0 ) ∈ R 2 pues se cumple
lim
( x ; y) → (x0 ; y0 )
f ( x; =
y) 5x0 2 y0 2 − 3x0 y0 + 4 x0 − 2 y=
f ( x0 ; y0 )
0
Ejemplo 6
Dada la función f definida por
(
)
4 sen x 4 + y 4
,
f ( x; y ) =
x4 + y 4
4,
si ( x; y) ≠ (0; 0)
si ( x; y) = (0; 0)
determine si f es continua en el punto (0; 0) .
Capítulo 4. Funciones reales de varias variables
269
Solución
Para la función f con dominio Dom ( f ) = R 2 se tiene
a)
(0; 0) ∈ Dom ( f )
y f (0; 0) = 4
b) Como la indeterminación de la forma (0 / 0) no se puede salvar mediante un proceso de factorización se hace el cambio de
u x 4 + y 4 , en el que u → 0 cuando ( x; y) → (0; 0) .
variable =
Luego,
L′H
4 cosu
4 senu
=
= lim
= 4
L lim
u→ 0
u→ 0
u
1
Por consiguiente,
lim
(x ; y) → (0;0)
c)
lim
(x ; y) → (0;0)
f ( x; y)= L= 4
f ( x; y)= 4= f (0; 0)
Por lo tanto, la función f es continua en (0; 0) .
Ejemplo 7
Dada la función f definida por
ln ( x − 1)2 + ( y − 1)2 + 1
,
2
2
f ( x; y ) =
(x − 1) + ( y − 1)
2,
si ( x; y) ≠ (1; 1)
si ( x; y) = (1; 1)
determine si f es continua en el punto (1; 1) .
Solución
Al verificar las tres condiciones para la continuidad de f en el
punto (1; 1) se tiene
a) (1; 1) ∈ Dom ( f ) =
R 2 y f (1; 1) = 2
b) Como la indeterminación de la forma ( 0 / 0 ) no se puede
salvar mediante un proceso de factorización se hace el cam2
2
bio de variable u = ( x − 1) + ( y − 1) , en el que u → 0 cuando
(x; y) → (1; 1) . Luego,
1
L′H
ln (u + 1)
u
=
L lim= =
lim + 1 1
u→ 0
u→ 0 1
u
Por consiguiente,
lim
(x ; y) → (1;1)
c)
lim
(x ; y) → (1;1)
f ( x; y ) = 1
f ( x; y) =1 ≠ 2 = f (1; 1)
Por lo tanto, la función f no es continua en el punto (1; 1).
270
Cálculo II
Ejercicios y problemas resueltos 4.2
1.
Verifique que
Solución
lim
xy + y 2
(x ; y) →(0; 0) x 2 + y 2
no existe
Para verificar que el límite no existe se buscan dos trayectorias
de aproximación C1 y C2 al punto (0; 0) , de manera que los
límites calculados sobre estas curvas sean distintos.
Así, para la curva de aproximación
C1 =
{ ( x; y ) ∈ R 2 / y = 0 }
y f ( x; y ) =
xy + y 2
x2 + y 2
resulta
L1
=
0
lim =
f ( x; y) lim=
f ( x; 0) lim
=
0
x →0
x →0 x 2
( x ; y)→(0; 0)
( x ; y)∈C1
De manera similar, para la curva de aproximación
C2 =
{ ( x; y ) ∈ R 2 / y = x }
se tiene
=
L2
x2 + x2
=
lim=
f ( x; y) lim
f ( x; x) lim=
1
x →0
x →0 x 2 + x 2
( x ; y)→(0;0)
( x ; y)∈C2
Por lo tanto, como L1 =0 ≠ L2 =1,
lim
xy + y 2
no existe.
(x ; y) →(0; 0) x 2 + y 2
2.
Calcule los siguientes límites
(
)
(
arctan x 2 + y 2 + sen x 2 + y 2
a)
lim
(x ; y) →(0; 0)
x2 + y 2
(
)
e y − x2 sen y − x 2 − y + x 2
lim
b)
(x ; y) → (0; 0) ln 1 + y − x 2 − sen y − x 2
(
)
(
)
)
Solución
a) Como la indeterminación de la forma (0 / 0) no se puede salvar mediante un proceso de factorización se hace el
u x 2 + y 2 , en el que u → 0 cuando
cambio de variable =
(x; y) → (0; 0) . Luego,
Capítulo 4. Funciones reales de varias variables
271
1
L′H
+ cos (u)
2
arctan (u) + sen (u)
1+ u
L lim =
lim
=
=
2
u→ 0
u
→
0
u
1
Por lo tanto,
(
)
(
)
arctan x 2 + y 2 + sen x 2 + y 2
L =
lim
=
2
2
2
( x ; y)→(0;0)
x
y
+
b) Como la indeterminación de la forma (0 / 0) no se puede salvar mediante un proceso de factorización se hace el cambio
de variable u= y − x 2 , donde u → 0 cuando ( x; y) → (0; 0) .
Luego,
′H
L
u
u
u
e sen (u) + e cos (u) − 1
e sen (u) − u
=
L lim
=
lim
u→0 ln (1 + u) − sen (u)
1
u→ 0
− cosu
1+ u
u
u
u
u
e sen (u) + e cos (u) + e cos (u) − e sen (u) 2
= lim
= −2
=
u→ 0
1
−1
−
+ sen (u)
(1 + u)2
′H
L
Por lo tanto,
(
)
e y − x2 sen y − x 2 − y + x 2
L=
lim
( x ; y) → (0; 0) ln 1 + y − x 2 − sen y − x 2
(
3.
Calcule
)
(
)
= −2
1
x 2 + y 2 ) cos 2
(
(x ; y) → (0; 0)
x + y2
lim
Solución
Para cada ( x; y) ∈ R 2 − { (0; 0) } se tiene
Teorema del emparedado
Sea I un intervalo que contiene al número a y sean f, g y h
funciones reales definidas en
I, excepto quizás en a.
Si f ( x) ≤ h ( x) ≤ g ( x) para
x ∈ ( I − { a} ) y
lim f ( x)= L= lim g ( x) ,
x→a
x→a
entonces lim h ( x) = L
x→ a
272
Cálculo II
1
−1 ≤ cos 2
≤1
x + y 2
Al multiplicar los tres miembros de la desigualdad anterior
por x 2 + y 2 se tiene
1
− x 2 + y 2 ≤ x 2 + y 2 cos 2
≤ x2 + y 2
x + y 2
1
Si−u = x 2 + y 2 , entonces u → 0 y −u ≤ u cos ≤ u
u
Como =
lim (−u) 0 y=
lim (u) 0
(
) (
u→ 0
)
u→ 0
1
por el teorema del emparedado se concluye que lim ucos = 0
u→0
u
Por lo tanto,
4.
1
x 2 + y 2 ) cos 2
0
=
(
(x ; y) → (0; 0)
x + y2
lim
Determine si la función
7x2 + 7 y 2 + 4 − 4 − x2 − y 2
, ( x; y) ≠ (0; 0)
f ( x; y ) =
x2 + y 2
(x; y) = (0; 0)
2,
es continua en el punto (0; 0) .
Solución
Para la función f con dominio Dom ( f ) = R 2 se tiene
a)
(0; 0) ∈ Dom ( f )
b) Para calcular
y f (0; 0) = 2
lim
(x ; y) → (0;0)
f ( x; y) se hace el cambio de variable
=
u x 2 + y 2 , donde u → 0 cuando ( x; y) → (0; 0) . Así, se tiene
(−1)
7
−
7u + 4 − 4 − u
2 7u + 4 2 4 − u
L lim
=
=
lim=
2
u→ 0
u
1
u→ 0
′H
L
Luego,
lim
(x ; y) → (0;0)
c)
lim
(x ; y)→(0;0)
f ( x; y ) = 2
f ( x; y)= 2= f (0; 0)
Por lo tanto, f es continua en el punto (0; 0) .
5.
Dada la función
1 + ( x − 1)2 + ( y − 1)2 − 1
, ( x; y) ≠ (1; 1)
f ( x; y ) =
(x − 1)2 + ( y − 1)2
( x; y) = (1; 1)
A ,
determine el valor de A para que f sea continua en el punto
P (1; 1) .
Solución
Para la función f con dominio Dom( f ) = R2 se tiene
a) f (1; 1) = A
Capítulo 4. Funciones reales de varias variables
273
b) Al hacer el cambio de variable z = ( x − 1)2 + ( y − 1)2 , donde
z → 0 cuando ( x; y) → (1; 1) , se tiene
1
L′H
1 + z − 1
2 1 + z 1
=
=
=
L lim
lim
z →0
z
z →0 1 2
Así,
c)
lim
lim
(x ; y) → (1;1)
(x ; y) → (1;1)
f ( x; y ) =
1
2
1
= f (1; 1=
) A
2
f ( x ; y=
)
Por lo tanto, para que f sea continua en el punto P (1; 1)
el valor de AAes=
6.
1
2
Determine si la función
2
2
2 ex +y − 2
, ( x; y) ≠ (0; 0)
f ( x; y ) =
ln x 2 + y 2 + 1
(x; y) = (0; 0)
4 ,
(
)
es continua en (0; 0) .
Solución
Para la función f con dominio Dom ( f ) = R 2 , se tiene
a) f (0; 0) = 4
z x 2 + y 2 , donde zz → 00
b) Al hacer el cambio de variable =
cuando ( x; y) → (0; 0) , se tiene
L′H
z
2e z − 2 0
2e
L lim =
=
=
lim
2
z →0 ln ( z + 1) 0
z →0
1
z + 1
c)
lim
(x ; y) → (0; 0)
f ( x; y) = 2 ≠ 4 = f (0; 0)
Por lo tanto, f no es continua en el punto (0; 0) .
274
Cálculo II
Ejercicios y problemas propuestos 4.2
1.
Verifique que
lim
( x ; y) → (0; 0)
2.
x2 y 2
(x2 + y 2 )
3
e 2(x −1)2 + 2 y 2 − 1
+ cos ( xy) , ( x; y) ≠ (1; 0)
f ( x; y) = ( x − 1)2 + y 2
(x; y) = (1; 0)
3,
A (1; 0)
no existe.
c)
(
)
(
)
1 − cos x 2 + y 2
sen x 2 + y 2
+
, ( x; y) ≠ (0; 0)
Calcule cada uno de los siguientes límites.
2
=
f ( x; y )
x2 + y 2
x2 + y 2
x 2 − 9 (2 x − 5 y)
(x; y) = (0; 0)
3 / 2,
a)
lim
(x ; y) → (0;0) 2 x 2 − 5xy − 6 x + 15 y
(
b)
c)
d)
e)
f)
(
)
lim
x + y +1 −1
(x ; y) → (0;0)
4.
lim
h)
(
2x2 + 2 y 2
1 − cos ( x − y)
lim
xy sen ( xy) + x 2 y 2 + 1 − 1
(x ; y) → (0; 0)
x3 y 3 + x 2 y 2
lim
arctan ( y − 2x) + ( y − 2x)
2
e y − 2 x sen ( y − 2x)
(x ; y) → (1; 2)
lim
2e yx − 2 − 2 yx 2 − y 2 x 4
(x ; y) → (1; 0)
y3 x6
e x + y sen ( x + y) − cos ( x + y) − x − y + 1
(x ; y) → (0; 0)
ln (1 + x + y) − sen ( x + y)
lim
Determine la continuidad de las siguientes
funciones en el punto que se indica.
a) f ( x; y) =
3x sen (2 y + 4)
( y + 2) sen x
)
Determine el valor de A para que f sea
continua en el punto P (0; 0) .
(x ; y) → (1;1) ( x − y) sen ( x − y)
lim
Dada la función
2
2
3xy − 2
ex +y − 1
+
, ( x; y) ≠ (0; 0)
arctan 2
2
2
2
f ( x; y ) =
x + y sen x + y
(x; y) = (0; 0)
A ,
6x2 + 6 y 2 + 9 − 9 − x2 − y 2
(x ; y) → (0;0)
)
B (0; 0)
2cos ( x + y) − 2
2
g)
3.
b)
5.
Analice la continuidad de cada función en
todo R2 .
2xy
, ( x; y) ≠ (0; 0)
a) f ( x; y) = x 2 + y 2
(x; y) = (0; 0)
0,
b)
(
)
ln x 2 + y 2 − 2 x − 2 y + 3
, ( x; y) ≠ (1; 1)
f ( x; y) =
( x − 1)2 + ( y − 1)2
( x; y) = (1; 1)
1,
, P (0; 0)
Capítulo 4. Funciones reales de varias variables
275
4.3Revisión del capítulo
Los temas tratados en el capítulo se relacionan en el siguiente
esquema
Funciones de
varias variables
Dominio y gráfica
de una función
Curvas y
superficies de nivel
Modelación
Límites y
continuidad
Ejercicios y problemas resueltos 4.3
1.
Determine en forma analítica y gráfica el dominio de cada una
de las funciones cuyas reglas de correspondencia son
(
a) f ( x; y) = 1 − 2x 2 + y 2 + ln x − y 2
)
1
b) f ( x; y) =
1 − x2 − y 2
ln 2
x + y 2
c) f ( x; y ; z) =
z + 9 − x2 − y 2
1 + 16 − z 2
Solución
(
a) Dado que f ( x; y) = 1 − 2x 2 + y 2 + ln x − y 2
)
debe ser un
número real, el dominio de f en su forma analítica es
Dom ( =
f)
{ ( x; y ) ∈ R 2
/ 1 − 2x2 + y 2 ≥ 0 ∧ x − y 2 > 0
}
Cada una de las condiciones que determinan el dominio
tiene como representación geométrica un conjunto de puntos ( x; y) del plano XY, como se muestra en la figura 4.3.1.
Y
(−
)
2; 0
0
x2
− y2 =
1
1/ 2
(
)
2; 0
X
Fig. 4.3.1
Cálculo II
0
x = y2
X
x – y2 > 0
1 − 2x2 + y 2 ≥ 0
276
Y
Al intersecar las regiones que corresponden a cada una
de las condiciones del dominio se obtiene la gráfica del
dominio de f (figura 4.3.2).
Y
(1; 1)
(0; 0)
X
(1; –1)
Fig. 4.3.2
1
b) Dado que f ( x; y) =
debe ser un número
1 − x2 − y 2
ln 2
x + y 2
real, el dominio de f está formado por los pares ordenados
1 − x2 − y 2
1 − x2 − y 2
1 − x2 − y 2
>
0
∧
>
0
∧
≠1
tales que ln 2
2
x2 + y 2
x2 + y 2
x +y
Luego, el dominio de la función f en su forma analítica es
( x; y )
1 − x2 − y 2
1 − x2 − y 2
1
Dom=
( f ) (x; y) ∈ R 2 / 2 2 > 1 ∧ 2 2 > 0 ∧ x2 + y 2 ≠
2
x +y
x +y
2
2
2 1− x − y
=
∈
>
x
;
y
R
/
1
)
(
x2 + y 2
1
= ( x; y ) ∈ R 2 / x 2 + y 2 < ∧ x 2 + y 2 ≠ 0
2
La gráfica del dominio de f se muestra en la figura 4.3.3.
Y
0
2 X
2
Fig. 4.3.3
Capítulo 4. Funciones reales de varias variables
277
c) Dado que f ( x; y ; z) =
z + 9 − x2 − y 2
debe ser un número
1 + 16 − z 2
real, el dominio de f en su forma analítica es
Dom
=
(f)
=
=
{ (x; y; z) ∈ R3 / 9 − x2 − y2 ≥ 0 ∧ 16 − z2 ≥ 0 }
{ (x; y; z) ∈ R3 / x2 + y2 ≤ 9 ∧ z2 − 16 ≤ 0 }
{ ( x; y ; z) ∈ R 3 / x 2 + y 2 ≤ 9 ∧ − 4 ≤ z ≤ 4 }
La gráfica del dominio de f se muestra en la figura 4.3.4
Z
z=4
x2 + y2 = 9
0
Y
z = –4
X
Fig. 4.3.4
2.
Para cada una de las funciones cuyas reglas de correspondencia se dan, determine su dominio y trace su gráfica.
a) z =f ( x; y) =3 − 4x 2 + y 2 − 8x − 4 y + 4
b) z =g ( x; y) =4 + y 2 − x 2 − 6 y + 2 x + 8
Solución
a) El dominio de la función f en su forma analítica es
Dom=
(f)
{ ( x; y ) ∈ R 2
/ 4 x 2 + y 2 − 8x − 4 y + 4 ≥ 0
}
(x − 1)2 ( y − 2)2
= ( x; y) ∈ R 2 /
+
≥ 1
1
4
Y
y la gráfica del dominio se muestra en la figura 4.3.5.
La gráfica de la función f es la superficie
2
0
1
Fig. 4.3.5
278
Cálculo II
X
S : z =3 − 4x 2 + y 2 − 8x − 4 y + 4
⇔ S : z − 3 =− 4 x 2 + y 2 − 8x − 4 y + 4
Al elevar al cuadrado ambos miembros de esta igualdad
y realizar las operaciones correspondientes, se obtiene
(x − 1)2 ( y − 2)2 (z − 3)2
1
+
−
4
4
= 1 ∧ z−3≤0
Esta última ecuación representa un hiperboloide de una
hoja con centro en el punto Q (1; 2; 3) y eje paralelo al eje Z.
Como z ≤ 3, la gráfica de la función f corresponde a la
parte del hiperboloide de una hoja que está debajo del plano
z = 3, como se muestra en la figura 4.3.6.
Z
Q(1; 2; 3)
( y − 2)2
2
1
=
( x − 1) +
4
C:
∧
z=3
0
Y
X
Fig. 4.3.6
b) z =g ( x; y) =4 + y 2 − x 2 − 6 y + 2 x + 8
El dominio de la función g en su forma analítica es
Dom (=
g)
=
=
{ ( x; y ) ∈ R 2 / y 2 − x 2 − 6 y + 2 x + 8 ≥ 0 }
{ ( x; y ) ∈ R
2
2
2
/ ( y − 3) − ( x − 1) ≥ 0
}
{ (x; y) ∈ R2 / ( y + x − 4)( y − x − 2) ≥ 0 }
Su gráfica es la región del plano XY limitada por
las rectas
L1 : x + y =
4 y L
y−x=
que se cortan en el punto A (1; 3) , como se muestra en la
figura 4.3.7.
La gráfica de la función g es la superficie
Y
L1 : x + y =
4
S : z =4 + y 2 − x 2 − 6 y + 2x + 8
⇔ S : z − 4=
y 2 − x2 − 6 y + 2x + 8
Al elevar al cuadrado ambos miembros de esta igualdad
y efectuar las operaciones correspondientes, se obtiene
(z − 4)2 − ( y − 3)2 + (x − 1)2 =
L2 : y − x =
2
A(1; 3)
0
X
Fig. 4.3.7
0 ∧ z−4≥0
Capítulo 4. Funciones reales de varias variables
279
La última ecuación representa un cono elíptico con centro en el punto Q (1; 3; 4) y eje paralelo al eje Y .
Como z ≥ 4 , la gráfica de la función g es la parte del cono
elíptico comprendida desde el plano z = 4 hacia arriba, como
se muestra en la figura 4.3.8.
Z
Q(1; 3; 4)
Y
0
X
Fig. 4.3.8
3.
Un toldo tiene la forma de un paraboloide elíptico S, cuya ecuación es
2
2
(x − 1) ( y − 2)
z=
4−
−
, z≥0
4
4
donde x , y y z se expresan en metros. El toldo está instalado
sobre un terreno plano que coincide con el plano XY .
a) Esboce la gráfica del toldo en el sistema coordenado tridimensional y calcule el área del terreno plano que está
cubierta por el toldo.
b) Determine la longitud de la traza de la superficie S con el
plano z = 3.
Solución
a) La superficie S corresponde a un paraboloide elíptico con
vértice en el punto V (1; 2; 4) y que se abre hacia abajo, como se muestra en la figura 4.3.9.
Z
V(1; 2; 4)
Y
x
X
280
Cálculo II
Fig. 4.3.9
El borde del terreno plano cubierto por el toldo es la traza
de la superficie S con el plano XY ( z = 0) , cuya ecuación es:
16
(x − 1)2 + ( y − 2)2 =
y que corresponde a la circunferencia de centro Q (1; 2; 0)
y de radio r = 4 m.
Luego,
2
A=
π r2 =
π (4) =
16 π
Por consiguiente, el área del terreno cubierto por el toldo
es 16 π m2 .
b) La traza de la superficie S con el plano z = 3, tiene por
ecuación
4
(x − 1)2 + ( y − 2)2 =
que corresponde a una circunferencia de centro Q (1; 2; 3)
y radio r = 2 m.
Luego, la longitud de esta circunferencia es
L = 2πr = 4π
Por lo tanto, la longitud de la traza de la superficie S con
el plano z = 3 es 4 π m.
4.
Sean f , g , h funciones cuyas reglas de correspondencia son
(
a) f ( x=
; y) ln x 2 + y 2
c) h ( x; y) = e x
2
)
b) g ( x =
y)
x2 + y 2
+ y2
Trace para cada una de ellas, en caso de que sea posible, las
curvas de nivel correspondientes a k =
−1, k =
0 y k = 2.
Solución
a) Las curvas de nivel de la función f están dadas por
(
)
f ( x; y) =k ⇔ ln x 2 + y 2 =k ⇔ x 2 + y 2 =e k
Así, para los valores dados de k, las curvas de nivel son
1
k =−1 ⇒ x 2 + y 2 =
e
cuya gráfica corresponde a la circunferencia de centro
1
C (0; 0) y radio
;
e
k =0 ⇒ x 2 + y 2 =1
Capítulo 4. Funciones reales de varias variables
281
cuya gráfica corresponde a la circunferencia de centro
C (0; 0) y radio 1, y
Y
k=2
k = –1
k =2 ⇒ x 2 + y 2 =e 2
k=0
0
X
cuya gráfica corresponde a la circunferencia de centro
C (0; 0) y radio e.
Estas curvas de nivel se muestran en la figura 4.3.10.
b) La curva de nivel de la función g está dada por
g ( x; y) =k ⇔ x 2 + y 2 =k ( k ≥ 0) ⇔ x 2 + y 2 =k 2 ( k ≥ 0)
Fig. 4.3.10
Como k ≥ 0 , no existe curva de nivel de g para k = −1
Así, para los otros valores dados de k, las curvas de nivel
de g son
Y
k =0 ⇒ x 2 + y 2 =0
k=2
que corresponde al punto C (0; 0) , y
k=0
0
2
X
k =2 ⇔ x 2 + y 2 =4
que corresponde a la circunferencia de centro C (0; 0) y
radio 2.
Fig. 4.3.11
Estas curvas de nivel se muestran en la figura 4.3.11.
c) La curva de nivel de la función h está dada por
h ( x; y ) = k ⇔ e x
2
+ y2
= k ( k > 0) ⇔ x 2 + y 2 = lnk ; k > 0
Como k > 0, no existen curvas de nivel de h para k = −1
y k = 0.
Para k = 2 la curva de nivel de h está dada por
x2 + y 2 =
ln2
que corresponde a la circunferencia de centro C (0; 0) y
radio
ln2 (figura 4.3.12).
Y
0
Fig. 4.3.12
282
Cálculo II
ln 2
X
5.
Sea f ( x; y ; z) = x 2 + y 2 − z 2 . En cada caso identifique y trace la
superficie de nivel de la función f que pasa por el punto dado.
a) A (1; 2; 2)
b) B(2; 2; 3)
Solución
Las superficies de nivel de la función f están dadas por
f ( x; y; z) =k ⇔ x 2 + y 2 − z 2 =k
a) Dado que la superficie de nivel pasa por el punto A (1; 2; 2) ,
entonces sus coordenadas verifican su ecuación, esto es
Z
12 + 22 − 22 = k ⇒ k = 1
Luego, la superficie de nivel de f que pasa por el punto
A (1; 2; 2) es
2
2
2
x +y −z =
1
0
Y
X
La gráfica corresponde a un hiperboloide de una hoja con centro en C (0; 0; 0) y eje de simetría con el eje Z
(figura 4.3.13).
Fig. 4.3.13
b) Dado que la superficie pasa por el punto B(2; 2; 3), entonces
sus coordenadas verifican su ecuación, esto es
22 + 22 − 32 =
k ⇒ k=
−1
Luego, la superficie de nivel de f que pasa por el punto
B(2; 2; 3) es
x 2 + y 2 − z 2 =−1 ⇔ − x 2 − y 2 + z 2 =1
La gráfica corresponde a un hiperboloide de dos hojas con centro en C (0; 0; 0) y eje de simetría con el eje Z
(figura 4.3.14).
Z
0
Y
x
X
y
Fig. 4.3.14
Capítulo 4. Funciones reales de varias variables
283
6.
x2 + y = 16
Una lámina delgada tiene la forma de un círculo de radio 4.
Si en el centro de la lámina se ubica el origen de un sistema
de coordenadas rectangulares, la temperatura (en ºC) en cada
punto ( x; y) de la lámina está dada por
T ( x; y)= y + x 2 , donde x 2 + y 2 ≤ 16
Y
4
y = 1 – x2
1
0
a) Determine la ecuación de la isoterma que pasa por el punto
A (0; 1) y trace su gráfica.
4
b) Sombree la parte de la lámina donde la temperatura es
negativa
X
Solución
a) La temperatura en el punto A (0; 1) está dada por
T (0; 1) =+
1 02 =
1
Fig. 4.3.15
Luego, la isoterma que pasa por A (0; 1) es la curva de
nivel donde la temperatura es 1º C y su ecuación es
Y
T ( x; y) =y + x 2 =1 ⇔ y =1 − x 2
Esta ecuación corresponde a la porción de la parábola
y = 1 − x 2 que se encuentra dentro del círculo x 2 + y 2 ≤ 16 ,
como se muestra en la figura 4.3.15.
0
X
y=
–x2
b) Los puntos ( x; y) de la lámina donde la temperatura es
negativa están dadas por
T ( x; y) < 0 ⇔ y + x 2 < 0 ∧ x 2 + y 2 ≤ 16
Fig. 4.3.16
⇔ y < − x 2 ∧ x 2 + y 2 ≤ 16 (figura 4.3.16).
7.
Se desea fabricar cajas rectangulares de 750 cm3 de capacidad
para repartir porciones de tortas en los cumpleaños. Cada caja
requiere de dos materiales, cartón grueso para el fondo, cuyo
costo es de 2 céntimos por cm2 y cartón delgado para los lados
y la tapa, cuyo costo es de 1 céntimo por cm2.
a) Determine el costo de los materiales utilizados para
construir una caja en función de las dimensiones de la base
de la caja.
b) Calcule el costo de los materiales para una caja cuya base
es un rectángulo de 15 cm de largo y 10 cm de ancho y
determine la longitud de la altura de la caja.
284
Cálculo II
Solución
a) Sean x, y, z el largo de la base, el ancho de la base y la altura
de la caja respectivamente.
De acuerdo con los datos del problema, el costo total C
para los materiales de una caja es
z
z
C ( x; y ; z) = 2xy + 2 yz + 2xz + xy
= 3xy + 2 yz + 2 xz
Dado que la capacidad de la caja es de 750 cm 3 , se tiene
xx
y
y
Fig. 4.3.17
750
(altura de la caja)
xy
V = xyz= 750 ⇒ z=
Luego, el costo de los materiales para una caja en función
de las dimensiones de la base de la caja es
C ( x; y) =3xy +
1500 1500
+
; x > 0, y > 0
x
y
=
x 15
=
, y 10, se obtiene
b) Al reemplazar
C (15;=
10) 3 (15)(10) + 100 +=
150 700
y la altura es
=
z
750
= 5
(15)(10)
Por consiguiente, el costo de materiales para una caja
cuya base es un rectángulo de 15 cm de largo y 10 cm de
ancho es 700 céntimos o S/ 7 y la altura de la caja es de
5 cm.
8.
Calcule los siguientes límites
a)
b)
lim
4xy + 9 − 6xy + 1
x3 y3 − 64
( x ; y) → (2; 2)
lim
( x ; y) → (1; −1)
ex
2
+ y2 −2
(
)
− 2 cos x 2 + y 2 − 2 + e 2− x
2
− y2
(x2 + y2 − 2) sen (x2 + y2 − 2)
Solución
a) Como la indeterminación de la forma (0 / 0) no se puede
salvar mediante un proceso de factorización y la función
contiene la expresión común xy tanto en el numerador como
en el denominador, se hace el cambio de variable u = xy, en
el que u → 4 cuando ( x; y) → (2; 2) . Así, se tiene
Capítulo 4. Funciones reales de varias variables
285
2
3
L′H
−
4u + 9 − 6u + 1
1
L = lim
= lim 4u + 9 2 6u + 1 = −
3
u→ 4
u→ 4
240
3u
u − 64
Por lo tanto,
lim
4xy + 9 − 6xy + 1
3 3
(x ; y) → (2; 2)
x y − 64
= −
1
240
b) Como la indeterminación es de la forma (0 / 0) se hace el cambio u = x 2 + y 2 − 2 , en el que u → 0 cuando
(x; y) → (1; −1) . Así, se tiene
L′H
e u − 2cos (u) + e −u
e u + 2 senu − e −u 0
L lim
=
= lim
u→ 0
u→ 0
usen (u)
senu + ucosu 0
′H
L
e u + 2cosu + e −u 4
= = 2
u→0 2cosu − usenu
2
= lim
Por consiguiente,
lim
ex
2
+ y2 −2
)
2
− y2
(x2 + y2 − 2) sen (x2 + y2 − 2)
( x ; y) → (1; −1)
9.
(
− 2cos x 2 + y 2 − 2 + e 2− x
=2
Determine si la función f es continua en el punto P0 (−3; 1) ,
donde
x 2 y 2 + 4 xy + 3
, si ( x; y) ≠ (−3;1)
x2 y 2 + 7 − 4
f ( x; y ) =
8
si ( x; y) = (−3;1)
,
3
Solución
Para la función f con dominio Dom ( f ) = R 2 , se tiene
a)
(−3; 1) ∈ Dom ( f )
8
y f (−3; 1) =
3
b) Para calcular
=
L
lim
=
f ( x; y )
(x ; y) → (−3;1)
x 2 y 2 + 4xy + 3 0
(x ; y) → (−3;1) x 2 y 2 + 7 − 4 0
lim
se utiliza el cambio de variable u = xy, donde u → −3 cuando ( x; y) → (−3; 1) . Así, se tiene
L′H
u2 + 4u + 3
2u + 4
8
=
L lim = =
lim
u→−3
u→−3
u
3
u2 + 7 − 4
2
u +7
286
Cálculo II
c)
x 2 y 2 + 4xy + 3 8
= = f (−3;1)
(x ; y) → (−3;1) x 2 y 2 + 7 − 4 3
lim
Por lo tanto, la función f es continua en el punto P0 (− 3; 1) .
10. Dada la función
( x − 2)2 sen ( x − 2)2 + ( y + 2)2
, si x; y ≠ 2; − 2
( ) (
)
2
2
f ( x; y ) =
(x − 2) + ( y + 2)
y) (2; − 2)
si ( x; =
B,
determine el valor de B para que la función f sea continua en el
punto P0 (2; − 2) .
Solución
Para que f sea continua en el punto P0 (2; − 2) , se debe cumplir
lim
(x ; y) → (2; −2)
f ( x; y=
) f (2; − 2=) B
Al calcular el límite de la función f, se tiene
L=
=
lim
f ( x; y )
lim
2
( x ; y) → (2; −2)
( x ; y) → (2; −2)
(x − 2)
.
lim
(x ; y) → (2; −2)
2
2
sen ( x − 2) + ( y + 2)
(x − 2)2 + ( y + 2)2
2
2
sen ( x − 2) + ( y + 2)
es una forma indeComo
lim
( x ; y)→(2; −2) ( x − 2)2 + ( y + 2)2
terminada (0 / 0) , se usa el cambio de variable
2
2
u = ( x − 2) + ( y + 2) , donde u → 0 cuando ( x; y) → (2; −2) .
Así, se tiene
L′H
cosu
senu
=
= lim
= 1
L lim
u→ 0 u
u→ 0 1
Luego,
lim
(x ; y) → (2; −2)
f ( x; y) =0 (1) =0 = f (2; − 2) = B
Por lo tanto, para que la función f sea continua en el punto
P0 (2; − 2) , el valor de la constante es B = 0.
Capítulo 4. Funciones reales de varias variables
287
Ejercicios y problemas propuestos 4.3
1.
5.
Determine en forma analítica y gráfica el
dominio de cada una de las funciones cuyas
reglas de correspondencia son:
a) f ( x; y) =
e
x2 − y 2
+ arcsen ( x + y)
xy
x+y
b) g ( x; y) arctan
=
9 − x2 − y 2
c) h ( x; y; z) =
2
+ ln ( xy − 1)
2
4z − z − x − y
1 + sen2
(
P
z1
6 3m
2
z2 − x2 − y 2
Se desea construir un ducto entre los puntos
P y Q. Dado que el suelo tiene diferente
composición, el costo de instalar un metro
de tubería varía según la zona. El terreno
se ha dividido mediante paralelas en tres
zonas, como se muestra en la figura 4.3.19.
Así, instalar un metro de tubería en la zona
z1 cuesta $ 400, en la zona z2 cuesta $ 300
y la tubería instalada en la frontera entre las
zonas z2 y z3 cuesta $ 200 el metro.
)
8 5m
x
z2
50 m
2.
Para cada una de las funciones dadas,
determine su dominio y trace su gráfica.
y
Fig. 4.3.19
a) f ( x; y) = x − 2 + 1
Determine una función que exprese el
costo total de instalación del ducto entre los
puntos P y Q en términos de x e y.
b) g ( x; y) =2 − y 2 − 2 y + x 2 − 4 x + 5
c) h ( x; y) =5 + x 2 − y 2 − 2 y + 3
3.
− x 2 + y 2 − z 2 . En cada caso,
Sea f ( x; y ; z) =
identifique y trace la superficie de nivel de la
función f que pasa por el punto dado
a) A (2; 1; 1)
4.
b) B (1; 2; 1)
c) C (3; 5; 4)
Una lámina delgada tiene la forma de la
región plana limitada por una elipse de
semiejes 5 m y 4 m, como se muestra en
la figura 4.3.18. Si la temperatura en cada
punto de la lámina es igual a la distancia
del punto al centro de la lámina, trace la
isoterma donde la temperatura es 3,5 ºC.
44m
m
5
m
5m
Fig. 4.3.18
288
Cálculo II
z3
6.
Una empresa textil produce y comercializa
dos tipos de chompas, A y B, con las cuales desea ingresar a un nuevo mercado en el
exterior.
Por experiencias anteriores se sabe que si
los precios de venta de las chompas A y B son
x e y doláres respectivamente, la demanda
de las chompas A es dA = 150 − 2x + y
y la demanda de las chompas B es
dB= 200 + x − 3y, expresadas ambas en
miles de unidades.
a) Determine una función que exprese el
ingreso de la empresa por la venta de los
dos tipos de chompas.
b) Si el costo unitario de producción para las
chompas A y B es de $ 30 y $ 25 respectivamente, halle una función que exprese
la utilidad de la empresa por la venta de
los dos tipos de chompas.
Q
7.
Si
lim
3
bx3 y3 + 2xy − 12 − 2
x2 y 2 − 4
(x ; y) → (2;1)
existe,
calcule el valor de b y luego determine el
valor del límite.
8.
Calcule los siguientes límites:
a)
b)
9.
1
1
−
2
2
(x ; y) → (3;1) ln x 2 + y 2 − 9
+
−
10
x
y
lim
(
)
(
)
2
(x ; y) → (0; 0)
ln ( x 4 + y 4 + 1) − ( x 4 + y 4 )
lim
arctan 6 x 4 + y 4
10. Dada la función
( x − 2)2 + y 2 + B − 3
, si ( x; y) ≠ (2; 0)
f ( x; y ) =
(x − 2)2 + y 2
si ( x; y) = (2; 0)
A ,
a) Calcule el valor de B para que
lim
(x ; y) → (2;0)
f ( x; y) exista
y luego determine el valor del límite.
b) Determine el valor de A para que la
función f sea continua en el punto
P0 (2; 0) .
En cada uno de los ejercicios, determine si la
función dada es continua en el punto P0 .
a)
2 1
, si ( x; y) ≠ (0; 0)
x cos 2
2
f ( x; y ) =
x + y
si ( x; y) = (0; 0)
3,
P0 (0; 0)
( x − 1)2 tan ( x − 1)2 + ( y + 3)2
, si x; y ≠ 1; −3
( ) ( )
2
2
b) g ( x; y) =
−
+
+
x
1
y
3
( ) ( )
si ( x; y) =
− 2,
(1; −3)
P0 (1; − 3)
Capítulo 4. Funciones reales de varias variables
289
Capítulo
5
Derivadas de funciones
de varias variables
En este capítulo se estudia la magnitud
del cambio de una variable dependiente
cuando cambian una o más de las variables
independientes. Para ello se usan las
herramientas del cálculo diferencial de
funciones de varias variables.
Sabes
Capacidades necesarias:
ü Derivar funciones de una variable.
ü Calcular límites de funciones de una
variable.
ü Determinar la continuidad de una
función real de varias variables.
Conocimientos previos
Gráfica de superficies cilíndricas y
cuádricas.
Límite de una función real.
Derivada de una función real.
Continuidad de una función de varias
variables.
Piensas
Habilidades por desarrollar:
ü Determinar
e
interpretar
las
derivadas parciales de una función
de varias variables.
ü Calcular el diferencial total de una
función de varias variables.
ü Determinar la derivada de una función compuesta de varias variables.
Secciones
ü Calcular la derivada direccional de
una función de varias variables.
5.1 Derivadas parciales de una
función de dos o más variables
5.2 Diferencial total
5.3 Derivadas de una función
compuesta de dos o más variables
5.4 Derivada direccional
5.5 Revisión del capítulo
Haces
Competencias por alcanzar:
ü Resolver ejercicios y problemas que
involucren derivadas de funciones
de varias variables.
En muchas situaciones de la vida diaria es frecuente encontrar funciones de
dos o más variables en las que cambios en las variables independientes deter­
minan los de la variable dependiente. Por ejemplo:
• La variación en el peso de una persona depende de las variaciones en la
cantidad de carbohidratos que consuma por día y de la cantidad de horas
diarias que dedique a hacer ejercicio.
• La variación del precio de un producto en el mercado depende de cómo
varíen su oferta y su demanda.
• La variación del ingreso mensual de una empresa depende, entre otras
cosas, de cómo varíen la experiencia y dedicación de sus trabajadores, así
como de los cambios en el capital invertido.
Para cuantificar o medir la variación o la razón de cambio de una magni­
tud variable que depende de otras dos o más magnitudes variables surgió el
cálculo diferencial para funciones de varias variables. En este contexto, si to­
das las variables independientes a excepción de una de ellas se consideran
como constantes, se origina la derivada parcial de la función con respecto a esa
única variable independiente que “varía”, mientras que si todas las variables
in­dependientes “varían” según la dirección de un vector, surge la derivada di­
reccional de la función en la dirección de dicho vector.
En este capítulo también se tratan las principales aplicaciones de las deriva­
das parciales de una función de varias variables en temas como el diferencial
total, la derivada de una función compuesta y la derivada direccional.
292
Cálculo II
5.1 Derivadas parciales de funciones reales de dos variables
Para una función real f de dos variables independientes con domi­
nio Dom ( f ) ⊂ 2 , tal que z = f ( x; y) , es importante conocer la
razón o tasa de cambio de la variable dependiente z = f ( x; y)
correspondiente a pequeñas variaciones de las variables indepen­
dientes x o y.
Un primer abordaje que se realiza para determinar la influencia de
las variables x e y en los valores de z = f ( x; y) es mantener fija una
de las variables x o y y calcular la razón de cambio de z con respecto
a la otra variable. Este tipo de análisis se presenta a continuación.
Definición 1. Variación parcial de la variable dependiente
Sea f una función real de dos variables independientes con dominio
Dom ( f ) ⊂ 2 tal que z = f ( x; y) y ( x0 ; y0 ) ∈ Dom ( f ).
a) El cambio de la variable dependiente z = f ( x; y) , cuando la
variable independiente x varía de x0 a x0 + ∆x y la varia­
ble independiente y se mantiene constante como y = y0 , se
denomina variación o incremento parcial de z = f ( x; y) con
respecto a x en el punto ( x0 ; y0 ) y se denota por
∆ x f ( x0 ; =
y0 ) f ( x0 + ∆x; y0 ) − f ( x0 ; y0 )
b) De manera similar, el cambio de la variable dependiente
z = f ( x; y) , cuando la variable independiente y varía de y0
a y0 + ∆y y la variable independiente x se mantiene constan­
te como x = x0 , se llama variación o incremento parcial de
z = f ( x; y) con respecto a y en el punto ( x0 ; y0 ) y se denota por
∆ y f (=
x0 ; y0 ) f ( x0 ; y0 + ∆y) − f ( x0 ; y0 )
Definición 2. Razón o tasa de cambio media
a) Se denomina razón de cambio media o tasa de cambio me­
dia de z = f ( x; y) con respecto a x cuando x varía de x0 a
x0 + ∆x y la variable independiente y se mantiene constante
como y = y0 al cociente
∆ x f ( x0 ; y0 )
∆x
=
f ( x0 + ∆x; y0 ) − f ( x0 ; y0 )
∆x
b) De manera similar, se denomina razón de cambio media o
tasa de cambio media de z = f ( x; y) con respecto a y cuando
y varía de y0 a y0 + ∆y y la variable independiente x se man­
tiene constante como x = x0 al cociente
∆ y f ( x0 ; y0 )
∆y
=
f ( x0 ; y0 + ∆y) − f ( x0 ; y0 )
∆y
Capítulo 5. Derivadas de funciones de varias variables
293
Definición 3. Derivadas parciales de una función de dos
variables en un punto
Sea f una función real de dos variables independientes con dominio
Dom ( f ) ⊂ 2 , tal que z = f ( x; y) y ( x0 ; y0 ) ∈ Dom ( f ) .
a) La razón de cambio o la tasa de cambio de z = f ( x; y) en
el punto ( x0 ; y0 ) con respecto a la variable independiente x
cuando la variable independiente y se mantiene constante co­
mo y = y0 , se denomina derivada parcial de f con respecto a
x en el punto ( x0 ; y0 ) y está dada por
∂f ( x0 ; y0 )
∂x
f ( x0 + ∆x; y0 ) − f ( x0 ; y0 )
= lim
∆x
∆x →0
si el límite existe.
b) De manera similar, la razón de cambio o la tasa de cambio
de z = f ( x; y) en el punto ( x0 ; y0 ) con respecto a la variable
independiente y cuando la variable independiente x se man­
tiene constante como x = x0 , se denomina derivada parcial de
f con respecto a y en el punto ( x0 ; y0 ) y está dada por
∂f ( x0 ; y0 )
∂y
f ( x0 ; y0 + ∆y) − f ( x0 ; y0 )
= lim
∆y →0
∆y
si el límite existe.
Observación 1
a) Si en la definición de la derivada parcial de f con respecto a x
en el punto ( x0 ; y0 ) se reemplaza ∆x = x − x0 , se tiene
∂f ( x0 ; y0 )
∂x
= lim
x → x0
f ( x; y0 ) − f ( x0 ; y0 )
x − x0
h, entonces
y si x − x0 =
∂f ( x0 ; y0 )
∂x
= lim
f ( x0 + h; y0 ) − f ( x0 ; y0 )
h →0
h
si los límites existen.
b) De manera similar, si en la definición de la derivada par­
cial de f con respecto a y en el punto ( x0 ; y0 ) se reemplaza
∆y = y − y0 , se tiene
∂f ( x0 ; y0 )
∂y
= lim
y → y0
h, entonces
y si y − y0 =
294
Cálculo II
f ( x0 ; y) − f ( x0 ; y0 )
y − y0
∂f ( x0 ; y0 )
∂y
= lim
f ( x0 ; y0 + h) − f ( x0 ; y0 )
h →0
h
si los límites existen.
Ejemplo 1
La presión P de un mol de gas ideal, en kilopascales ( kPa), es
dada por
T
P (T ; V ) = 8, 31
V
donde T y V representan la temperatura (en grados Kelvin) y el
volumen (en litros) del gas. Determine
a) La presión si la temperatura del gas es de 100 K y el volumen
es de 10 L .
El pascal (Pa) es la unidad de pre­
sión del Sistema Internacional de
Unidades. Se define como la presión
que ejerce una fuerza de 1 newton
sobre una superficie de 1 metro
cuadrado. La dirección de la fuerza
debe ser perpendicular a la super­
ficie. Un kilopascal (kPa) equivale a
1000 pascales.
b) La razón de cambio media de la presión cuando la temperatu­
ra del gas cambia de 100 K a 105K y el volumen se mantiene
constante en 10 L.
c) La razón de cambio instantánea de la presión con respecto a
la temperatura cuando la temperatura es 100 K y el volumen
se mantiene constante en 10 L .
d) La razón de cambio media de la presión cuando la tempe­
ratura del gas se mantiene constante en 100 K y el volumen
cambia de 10 L a 10,1L.
e) La razón de cambio instantánea de la presión con respecto
al volumen cuando la temperatura es 100 K y el volumen se
mantiene constante en 10 L.
Solución
a) Al reemplazar T = 100 K y V = 10 L , se tiene
100
= 8=
, 31
83,1
10
Es decir, cuando la temperatura del gas es 100 K y el volumen
es 10 L la presión del gas es de 83,1 kPa.
b) Cuando la temperatura del gas cambia de 100 K a 105K y el
volumen se mantiene constante en 10 L , la razón de cambio
media de la presión del gas es
∆T P (100; 10) P (100 + 5; 10) − P (100; 10)
=
= 0, 831
∆T
5
Esto significa que si la temperatura del gas cambia de
100 K a 105 K y el volumen se mantiene constante en 10 L , la
Capítulo 5. Derivadas de funciones de varias variables
295
presión del gas aumenta 0 , 831 kilopascales por cada grado
Kelvin que aumente la temperatura.
c) Cuando la temperatura es 100 K y el volumen se mantiene
constante en 10 L , la razón de cambio de la presión del gas
con respecto a la temperatura es
∂P (100; 10)
∂T
= lim
h →0
P (100 + h; 10) − P (100; 10)
h
100 + h
100
8, 31
− 8, 31
10
10
= lim
h →0
h
0 831
= lim
= 0 , 831
→
Luego, cuando la temperatura es 100 K y el volumen se
mantiene constante en 10 L , la presión del gas aumenta a
razón de 0 , 831 kPa / K.
d) Cuando el volumen del gas cambia de 10 L a 10,1L y la tem­
peratura se mantiene constante en 100 K , la razón de cambio
media de la presión es
∆ V P (100; 10)
∆V
=
P (100; 10 + 0,1) − P (100; 10)
0,1
= − 8, 23
Esto es, la tasa de cambio media de la presión del gas es
8, 23 kilopascales por cada litro que aumente el volumen.
e) Cuando el volumen del gas es 10 L y la temperatura se man­
tiene constante en 100 K , la razón de cambio de la presión del
gas con respecto al volumen es
∂P (100; 10)
∂V
= lim
h →0
P (100; 10 + h) − P (100; 10)
h
100
100
8, 31
− 8, 31
10 + h
10 = −8, 31
= lim
h →0
h
Por consiguiente, cuando la temperatura se mantiene cons­
tante en 100 K y el volumen es 10 L , la presión del gas decrece
a un razón de 8, 31kPa / L .
Definición 4
Funciones derivadas parciales de primer orden
Sea f una función real de dos variables independientes con dominio
Dom ( f ) ⊂ 2 , tal que z = f ( x; y) .
296
Cálculo II
a) La derivada parcial de primer orden de f con respecto a la
variable independiente x es la función dada por
∂f ( x; y)
f ( x + h; y ) − f ( x; y )
= D1=
f ( x; y) lim
h →0
∂x
h
f=
x ( x; y )
para cualquier ( x; y) ∈ Dom ( f ) tal que el límite exista. Así,
Dom ( f x ) =
{ (x; y) ∈Dom ( f ) / fx (x; y) es un número real } ⊂ Dom ( f )
b) La derivada parcial de primer orden de f con respecto a la
variable independiente y es la función dada por
∂f ( x; y)
f ( x ; y + h) − f ( x ; y )
= D2=
f ( x; y) lim
h →0
∂y
h
f=
y ( x; y )
para cualquier ( x; y) ∈ Dom ( f ) tal que el límite exista. Así,
( ) {
}
Dom f y =
(x; y) ∈Dom ( f ) / f y (x; y) es un número real ⊂ Dom ( f )
Ejemplo 2
Use la definición para determinar las derivadas parciales de
primer orden de la función
f ( x=
; y) 3x 2 y + 2xy 2
Solución
Por definición, las derivadas parciales de primer orden de f son:
a)
f x ( x; y) = lim
f ( x + h; y ) − f ( x; y )
h
h →0
2
3 ( x + h) y + 2 ( x + h) y 2 − 3x 2 y + 2xy 2
= lim
h →0
h
(
)
= lim 6xy + 3hy + 2 y 2 = 6xy + 2 y 2
h →0
b) f y ( x; y) = lim
f ( x ; y + h) − f ( x ; y )
h
h →0
3x 2 ( y + h) + 2x ( y + h)2 − 3x 2 y + 2 xy 2
= lim
= 3x 2 + 4 xy
h →0
h
(
)
=lim 3x 2 + 4 xy + 2 xh =3x 2 + 4 xy
h →0
Observación 2
Sea z = f ( x; y) una función real de dos variables independientes
con dominio Dom ( f ) ⊂ 2 . En la definición de la derivada parcial
de f con respecto a x se observa que y es constante y x es variable.
Así, para hallar la derivada parcial de f con respecto a x se utili­
zan las reglas y fórmulas de derivación considerando a la variable
Capítulo 5. Derivadas de funciones de varias variables
297
y como una constante. Se procede de manera similar para hallar la
derivada parcial de f con respecto a y.
Ejemplo 3
En una caja cerrada de 16 m 3 de capacidad, el ancho, largo y la
altura miden x, y, z metros respectivamente tal como se muestra
en la figura 5.1.1.
z
x
y
Fig. 5.1.1
a) Determine una función A ( x; y) que permita hallar el área su­
perficial de la caja. Calcule A (2; 4) e interprete el resultado.
b) Calcule Ax (2; 4) y Ay (2; 4) e interprete los resultados.
Solución
a) El área superficial A de la caja es
A = Área de la base + Área de latapa + Área lateral
A = xy + xy + 2 xz + 2 yz
Para expresar el área superficial A en términos de x e y se
usa el dato de la capacidad de la caja, esto es
V = xyz = 16 ⇒ z =
16
xy
Al reemplazar z en la expresión del área se obtiene
16
16
32 32
A ( x; y) = 2xy + 2x + 2 y = 2xy +
+
x
y
xy
xy
Al evaluar en x = 2, y = 4 se obtiene A (2; 4) = 40
Es decir, cuando el ancho y el largo de la base de la caja
miden 2 m y 4 m respectivamente, el área de la caja es 40 m 2 .
b) La derivada parcial del área con respecto a x está dada por
Ax ( x; y=
) 2y −
32
x2
de donde, Ax (2; 4) = 0 . Así, cuando el ancho de la base mide
2 m y el largo de la base permanece constante en 4 m, el área
de la caja no aumenta ni disminuye.
298
Cálculo II
La derivada parcial del área con respecto a y está dada por
Ay ( x; y=
) 2x −
32
y2
de donde, Ay (2; 4) = 2. Esto significa que cuando el ancho de
la base se mantiene constante en 2 m y el largo de la base de la
caja mide 4 m, el área de la caja aumenta a una razón de 2 m2
por cada metro que aumente el largo de la base de la caja.
Ejemplo 4
La utilidad U de una empresa que fabrica y vende un único pro­
ducto depende del precio de venta v de dicho producto y del
gasto en publicidad p para promocionarlo, y está dada por
p2
v 2 vp
U ( v ; p) = −
+
, v > 0, p > 0
2 100 1000
Calcule U v (36; 5000) y U p (36; 5000) e interprete los resulta­
dos si se sabe que v y p están dados en dólares.
Solución
Al derivar U con respecto a las variables independientes v y p y
evaluar en el punto (36; 5000) se tiene
p
U v ( v ; p) =
v−
⇒ U v (36; 5000) =
−14
100
p
v
9, 64
U p ( v ; p) =
−
+
⇒ U p (36; 5000) =
100 500
La expresión U v (36; 5000) = −14 significa que, cuando el pre­
cio de venta es $36 y el gasto en publicidad se mantiene constan­
te en $5000, la utilidad disminuye a razón de $14 por cada dólar
que aumente el precio de venta.
De manera similar, U p (36; 5000) = 9, 64 significa que, cuando
el precio de venta se mantiene constante en $36 y el gasto en pu­
blicidad es $5000, la utilidad aumenta a razón de $9,64 por cada
dólar que se adicione en el gasto en publicidad.
Ejemplo 5
Determine las funciones derivadas parciales de primer orden de
cada una de las siguientes funciones.
a) f ( x; y)= x 2 y 2 + 2 x3 y − 4 x + 3y
b) f ( x; y) =
x3 + 3y3 + xy
Capítulo 5. Derivadas de funciones de varias variables
299
(x2 + y2 ) e xy
y)
c) f ( x; =
d) f ( x; y) =
ln (2x + 3y)
xy
Solución
Al considerar que f es una función que depende solo de una de
las variables (la otra variable es constante) y al aplicar las reglas
y fórmulas de derivación, se tiene:
a)
∂f ( x; y)
∂x
∂f ( x; y)
∂y
b)
= 2 x 2 y + 2 x3 + 3
∂f ( x; y)
∂x
∂f ( x; y)
∂y
c)
= 2xy 2 + 6x 2 y − 4
=
=
3x 2 + y
2 x3 + 3y3 + xy
9y2 + x
2 x3 + 3y3 + xy
∂f ( x; y)
= 2xe xy + x 2 + y 2 e xy y
∂x
(
)
∂f ( x; y)
= 2 ye xy + x 2 + y 2 e xy x
∂y
(
d)
)
2
(xy) − ln (2x + 3y) y
∂f ( x; y) 2x + 3y
=
∂x
(xy)2
=
∂f ( x; y)
∂y
2x − (2x + 3y) ln (2x + 3y)
x 2 y ( 2 x + 3y )
3
( xy) − ln (2 x + 3y) x
2 x + 3y
=
( xy)2
=
3y − (2x + 3y) ln (2x + 3y)
xy 2 (2x + 3y)
Ejemplo 6
Evalúe las funciones derivadas parciales de primer orden de
cada una de las siguientes funciones en el punto dado
a) f ( x; y) =
300
Cálculo II
x 2 + y 2 + xy , P (1; −1)
x 1
b) f ( x; y=
) arctan + ln x2 + y 2 , P (1; 3)
y 2
(
)
π
c) f ( x; y) = sen (cos ( xy)) , P ; 1
2
Solución
a) Al derivar f con respecto a las variables x e y y evaluar en el
punto P (1; −1) , se tiene
=
f x ( x; y )
2x + y
1
=
⇒ f x (1; −1)
2
2 x + y + xy
2
2
2y + x
1
f y ( x; y ) =
⇒ f y (1; −1) =
−
2
2
2
2 x + y + xy
b) De manera similar, al derivar f con respecto a las variables x e
y y evaluar en el punto P (1; 3) , resulta
f x ( x; y ) =
1
y
x
1+
y
−
f y ( x; y ) =
2
+
x
2
x +y
2
=
x+y
2
x +y
2
⇒ f x (1; 3) =
2
5
⇒ f y (1; 3) =
1
5
x
y2
x
1+
y
2
+
y
2
x +y
2
=
−x + y
2
x +y
2
c) Al derivar f con respecto a las variables x e y y evaluar en el
π
punto P ;
2
1 , se tiene
π
f x ( x; y)= cos (cos ( xy)) (−sen ( xy)) y ⇒ f x ; 1 = −1
2
π
π
f y ( x; y)= cos (cos ( xy)) (−sen ( xy)) x ⇒ f y ; 1 = −
2
2
Interpretación geométrica de las derivadas parciales
de primer orden
Para funciones que dependen de una variable, la derivada evaluada
en un punto se interpreta geométricamente como la pendiente de la
recta tangente a la gráfica de la función en dicho punto.
Capítulo 5. Derivadas de funciones de varias variables
301
En el caso de funciones de dos variables, las derivadas parciales
de primer orden se interpretan geométricamente de manera similar.
Sean f una función real de dos variables y ( x0 ; y0 ) ∈ Dom ( f ) ⊂ 2
tales que f x ( x0 ; y0 ) y f y ( x0 ; y0 ) existen, y sea P ( x0 ; y0 ; f ( x0 ; y0 ))
un punto de la superficie S, donde S es la gráfica de f, esto es
S : z = f ( x; y)
a) Para determinar el significado geométrico de f x ( x0 ; y0 ) se
procede como sigue:
En la definición de la derivada parcial de f x ( x0 ; y0 ) , la
variable y se mantiene constante como y = y0 . Esta ecuación
en el espacio 3 representa un plano paralelo al plano coor­
denado XZ, esto es
Q1 : y = y0
En la ecuación de la curva
C1 : z = f ( x; y0 )
la variable z depende solo de
la variable x.
Luego, la traza de la superficie S con el plano Q1 es la curva
C1=
: z u=
( x) f ( x ; y 0 )
la cual está contenida en el plano Q1 (figura 5.1.2).
Z𝑧𝑧
𝑃𝑃
P
x0
L𝐿𝐿T𝑇𝑇11
𝑦𝑦y0 0
0
𝑥𝑥0
C𝒞𝒞11
𝑥𝑥X
𝑄𝑄11 ::𝑦𝑦y =
Q
= 𝑦𝑦y00
Y𝑦𝑦
Fig. 5.1.2
Dado que la derivada parcial de f con respecto a la variable
x en el punto ( x0 ; y0 ) es
f x ( x0 ; y0 ) = lim
h→0
f ( x0 + h; y0 ) − f ( x0 ; y0 )
h
u ( x0 + h) − u ( x0 )
= lim
=
u′ ( x0 )
h→0
h
Entonces f x ( x0 ; y0 ) es la pendiente de la recta tangente a
la curva C1 en el punto P ( x0 ; y0 ; z0 ) , donde z0 = f ( x0 ; y0 ) .
302
Cálculo II
Además, la ecuación de la recta tangente LT a la curva C1
1
en el punto P ( x0 ; y0 ; z0 ) es
LT =
: z − z0 f x ( x0 ; y0 )( x − x0 ) , y = y0
1
Al reemplazar t= x − x0 se obtiene la forma paramétrica
de la ecuación de la recta LT , esto es
1
x x0 + t
=
.
, t∈
LT : y = y0
1
LT :
.
1
z = z0 + f x ( x0 ; y0 ) t
de donde el vector dirección de la recta LT es
1
a = (1; 0; f x ( x0 ; y0 )) .
b) En forma análoga, para determinar el significado geométrico
de f y ( x0 ; y0 ) se procede como se describe a continuación.
En la definición de la derivada parcial de f y ( x0 ; y0 ) la
variable x se mantiene constante como x = x0 . Esta ecuación
en el espacio 3 representa un plano paralelo al plano coor­
denado YZ, esto es
Q2 : x = x0
Luego, la traza de la superficie S con el plano Q2 es la curva
C2=
: z v=
( y) f (x0 ; y)
la cual está contenida en el plano Q2 (figura 5.1.3).
En la ecuación de la curva
𝑧𝑧
Z
C2 : z = f ( x0 ; y)
la variable z depende solo de la
variable y.
𝐿𝐿L𝑇𝑇T22
C𝒞𝒞22 : z = fP𝑃𝑃( x0 ; y)
x0
y𝑦𝑦0 0
0
𝑥𝑥0
𝑥𝑥
X
Y𝑦𝑦
𝑄𝑄
Q22: 𝑥𝑥
: x== 𝑥𝑥x00
Fig. 5.1.3
Capítulo 5. Derivadas de funciones de varias variables
303
Dado que la derivada parcial de f con respecto a la variable
y en el punto ( x0 ; y0 ) es
f y ( x0 ; y0 ) = lim
f ( x0 ; y0 + h) − f ( x0 ; y0 )
h
h→0
v ( y 0 + h) − v ( y 0 )
= lim
=
v ′ ( y0 )
h→0
h
entonces f y ( x0 ; y0 ) es la pendiente de la recta tangente a la
curva C2 en el punto P ( x0 ; y0 ; z0 ) , donde z0 = f ( x0 ; y0 ) .
Además, la ecuación de la recta tangente LT a la curva C2
2
en el punto P ( x0 ; y0 ; z0 ) es
LT =
: z − z0 f y ( x0 ; y0 )( y − y0 ) ,
2
x = x0
Al reemplazar t= y − y0 se obtiene la forma paramétrica
de la ecuación de la recta LT , esto es
2
x=x
0
.
LT : y =
y0 + t
2
.
=
z z0 + f y ( x0 ; y0 ) t
,t ∈
Luego, el vector dirección de la recta LT es
2
b = 0; 1; f y ( x0 ; y0 )
(
)
Ejemplo 7
Calcule la pendiente de la recta tangente a la traza de la superficie S : z = f ( x; y) =
punto Q (1; 1; 6) .
49 − 9x 2 − 4 y 2 con el plano x = 1 en el
Solución
Sean C la traza de la superficie S : z = f ( x; y) = 49 − 9x 2 − 4 y 2
con el plano P : x = 1 y LT la recta tangente a C en el punto
Q (1; 1; 6) . Como C está contenida en el plano P : x = 1, entonces
las abscisas de los puntos de C son constantes y las ordenadas
son variables. Así, la pendiente de la recta LT se obtiene al eva­
luar la derivada parcial de f con respecto a la variable y en el
punto (1; 1) , es decir f y (1; 1)
Al derivar f con respecto a y y evaluar en el punto (1; 1) ,
se tiene
− 4y
2
f y ( x; y ) =
⇒ f y (1; 1) =
−
2
2
3
49 − 9x − 4 y
2
Por lo tanto, la pendiente de la recta LT es mT = − .
3
304
Cálculo II
Ejemplo 8
Una recta tangente a la traza de la superficie
=
z e
xysen(πx)
−
xy
4 + x2
con un plano Q paralelo al plano XZ en un punto donde x = 2,
tiene pendiente −10π. Determine la ecuación del plano Q.
Solución
Sea A (2; y0 ; f (2; y0 )) el punto de contacto de la recta tangente
LT a la traza de la superficie
=
S : z f=
( x; y ) e
xysen(πx)
−
xy
4 + x2
con el plano Q.
Como Q es paralelo al plano XZ, su ecuación es de la forma
Q : y = y0 , donde y0 es una constante que se debe determinar y
la pendiente de LT es igual a f x (2; y0 ) .
Al derivar f con respecto a x se tiene
=
f x ( x; y ) e
xysen(πx)
[ ysen (πx) + xyπcos (πx)] −
Luego, al evaluar f x en el punto
pendiente resulta
(2; y0 )
(
)
y 4 + x2 − 2x2 y
(4 + x 2 )
2
e igualar a la
mT = f x (2; y0 ) = 2 y0 π = −10π ⇔ y0 = −5
Por lo tanto, la ecuación del plano es
Q : y = –5.
Plano tangente y recta normal
Sean f una función de dos variables con Dom ( f ) ⊂ 2 cuya gráfica
es la superficie S : z = f ( x; y) , P0 ( x0 ; y0 ; f ( x0 ; y0 )) un punto de S
y C1 y C2 las trazas de la superficie S con los planos Q1 y y0 y
Q2 : x = x0 respectivamente.
De acuerdo con las interpretaciones geométricas de las derivadas
parciales de primer orden de f en el punto ( x0 ; y0 ) , los vectores di­
rección de las rectas tangentes LT y LT a las trazas C1 y C2 en el
1
2
punto P0 ( x0 ; y0 ; f ( x0 ; y0 )) son respectivamente
a = (1; 0; f x ( x0 ; y0 )) y b = 0; 1; f y ( x0 ; y0 ) .
(
)
Capítulo 5. Derivadas de funciones de varias variables
305
El plano tangente PT a la superficie S en el punto
P0 ( x0 ; y0 ; f ( x0 ; y0 )) es el plano que contiene a las rectas LT y LT
1
(figura 5.1.4).
Z
LN
i j
k
a = (1; n0;=fbx ×
(xa0 ;=y00)) 1 f y (x0 ; y0 ) = fx (x0 ; y0 ) ; f
b = 0; 1; f y ( x10 ; y00 ) f x ( x0 ; y0 )
LT
1
LT
2
2
(
P0
(
)
Q2 : x = x0
Y
Q1 : y = y0
X
Fig. 5.1.4
Como los vectores dirección de LT y LT son respectivamente
1
2
a = (1; 0; f x ( x0 ; y0 )) y b = 0; 1; f y ( x0 ; y0 )
(
)
un vector normal al plano tangente PT es
i j
k
n = b × a = 0 1 f y ( x0 ; y0 ) = f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1
1 0
(
f x ( x0 ; y0 )
)
Luego, un punto cualquiera P ( x; y; z) pertenece al plano tan­
gente PT si y solo si
P0 P ⋅ n = ( x − x0 ; y − y0 ; z − z0 ) ⋅ f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1 = 0
(
)
⇔ PT : ( x − x0 ) f x ( x0 ; y0 ) + ( y − y0 ) f y ( x0 ; y0 ) − ( z − z0 ) =
0
Al efectuar las operaciones en esta ecuación se obtiene la forma
general de la ecuación del plano tangente
PT : Ax + By + Cz + D =
0
donde A = f x ( x0 ; y0 ) , B = f y ( x0 ; y0 ) y C = −1.
La recta normal LN a la superficie S : z = f ( x; y) en el punto
P0 ( x0 ; y0 ; z0 ) es la recta que pasa por el punto P0 ( x0 ; y0 ; z0 ) y
sigue la dirección del vector
=
n f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1
(
)
Así, la ecuación vectorial de la recta normal es
LN : ( x;=
y ; z)
306
Cálculo II
(x0 ; y0 ; z0 ) + t ( fx (x0 ; y0 ) ;
)
f y ( x0 ; y0 ) ; −1 , t ∈
Ejemplo 9
Determine las ecuaciones del plano tangente y de la recta normal
a la superficie
S : z = f ( x; y) = x3 − y 2 − 3ln ( x + y) + x 2 + y 2
en el punto A (1; 0; 2) .
Solución
Para determinar las ecuaciones del plano tangente y de la recta
normal a la superficie S se requieren el punto A (1; 0; 2) y el vec­
tor normal
=
n f x (1; 0) ; f y (1; 0) ; −1
(
)
Así, las derivadas parciales de primer orden de f en el punto
son
3
x
f x ( x; y) =3x 2 −
1
+
⇒ f x (1; 0) =
2
x+y
x + y2
(1; 0)
f y ( x; y ) =
−2 y −
3
y
+
⇒ f y (1; 0 ) =
−3
2
x+ y
x + y2
Luego, el vector normal del plano tangente a la superficie
S es n = (1; −3; −1) y la ecuación de este plano que pasa por el
punto de contacto A (1;0; 2 ) es
PT : ( x − 1; y − 0; z − 2) ⋅ (1; − 3; −1) =
0
⇔ ( x − 1) + ( y − 0)(−3) − ( z − 2) =
0
⇔ x − 3y − z +1 =
0
Por lo tanto, la ecuación general del plano tangente a la super­
ficie S en el punto A (1; 0; 2) es
PT : x − 3y − z + 1 =
0
y la ecuación vectorial de la recta normal a la superficie S en el
punto A (1; 0; 2) es
LN : ( x; y=
; z) (1; 0; 2) + t (1; −3; −1) , t ∈
Ejemplo 10
Halle la ecuación del plano tangente a la superficie
S : z =f ( x; y) =x 2 + 3xy − y 2
que es paralelo al plano Q : 16x − 2 y − 2z + 1 =
0.
Capítulo 5. Derivadas de funciones de varias variables
307
Solución
Para determinar la ecuación del plano tangente a la super­
ficie S se requieren el punto de tangencia A ( x0 ; y0 ; z0 ) , donde
z0 = f ( x0 ; y0 ) , y el vector normal
=
n f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1
(
)
Como el plano tangente es paralelo al plano Q, el vector n
es paralelo al vector nQ = (16; − 2; − 2) . Luego, existe un número
real λ tal que n = λnQ .
Dado que f ( x; y) =x 2 + 3xy − y 2 , se tiene
f x ( x; y) = 2x + 3y ⇒ f x ( x0 ; y0 ) = 2x0 + 3y0
f y ( x; y) =3x − 2 y ⇒ f y ( x0 ; y0 ) =3x0 − 2 y0
Al reemplazar en la condición de vectores normales paralelos,
resulta
n=
λnQ ⇔ f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1 =
λ (16; − 2; − 2)
(
)
⇔ (2x0 + 3y0 ; 3x0 − 2 y0 ; −1) =
λ (16; − 2; − 2)
De esta igualdad de vectores se obtiene el sistema de ecuaciones
16λ
2 x0 + 3y0 =
3x0 − 2 y0 =−2λ
−1 =−2λ
cuya solución es
λ =1 / 2, x0 = 1, y0 = 2
Luego, el punto de tangencia es A (1; 2; 3) y el vector normal
al plano tangente es n = (8; −1; −1) .
Por consiguiente, la ecuación del plano tangente PT que pasa
por el punto A (1; 2; 3) y tiene vector normal n = (8; −1; −1) es
PT : 8 ( x − 1) − ( y − 2) − ( z − 3) = 0 ⇔ PT : 8x − y − z − 3 = 0
Observación 3. Derivadas parciales de primer orden
de una función real de n variables reales
Al extender las definiciones de derivadas parciales de primer orden
para funciones de n variables independientes se tiene:
a) Sea f una función real de n variables independientes con do­
minio Dom ( f ) ⊂ n , tal que w = f ( x1 ; …; xk ; …; xn ) . Las
de­rivadas parciales de primer orden de f con respecto a ca­
da una de las variables x1 , … , xk , … , xn , son las funciones
f x , … , f x , … , f x dadas por
1
308
Cálculo II
k
n
f x ( x1 ; …; xk ; …; xn ) =
lim
k
f ( x1 ; …; xk + h; …; xn ) − f ( x1 ; …; xk ; …; xn )
h
h →0
donde
=
k 1, 2 , 3, … , n, para cualquier
tal que el límite exista. Así,
(x1 ; …; xn ) ∈ Dom ( f )
( ) = { (x ; …; x ) ∈Dom ( f ) / f (x ; …; x ) ∈ } ⊂ Dom ( f )
A (a ; …; a )∈ Dom ( f ) , el número real f x (a1 ; …; an )
Dom f x
n
1
k
xk
n
1
Si
1
n
xk
k
se interpreta como la razón de cambio de w en el punto
A (a1 ; …; an ) con respecto a la variable independiente xk ,
cuando para cada i ∈ {1; …; n} , i ≠ k , las variables xi se man­
tienen constantes como xi = ai .
b) Otra notación que se usa para las derivadas parciales de
primer orden de una función w = f ( x1 ; …; xk ; …; xn ) es
f x ( x1 ; …; x=
n)
k
=
k 1, 2, 3, … , n
∂f ( x1 ; …; xk ; …; xn )
= Dk f ( x1 ; …; xk ; …; xn )
∂xk
c) Sea w = f ( x1 ; …; xk ; …; xn ) una función real de n variables
independientes con dominio Dom ( f ) ⊂ n . En la definición
de la derivada parcial de f con respecto a xk se observa que
x1 , … , xn son constantes y que xk es variable. Así, para hallar
la derivada parcial de f con respecto a xk se utilizan las reglas
de derivación para funciones reales de una variable real al
considerar f como una función solo de xk . Se procede de ma­
nera similar para hallar las derivadas parciales f x , … , f x .
1
n
Ejemplo 11
Determine las funciones derivadas parciales de primer orden pa­
ra cada una de las siguientes funciones.
a)
b)
x
f (=
x; y ; z) sen ( xyz) + ln
yz
g ( x; y ; z ; w) =
y
x
e z
w 2 xy 2
Solución
Al aplicar las reglas y fórmulas de derivación se tiene
a)
=
f x ( x; y; z) cos ( xyz) yz +
1
x
f=
y ( x; y ; z) cos ( xyz) xz −
1
y
=
f z ( x; y; z) cos ( xyz) xy −
1
z
Capítulo 5. Derivadas de funciones de varias variables
309
y
b)
y
y
− 2 e xz w 2 xy 2 + e x z w 2 y 2
g x ( x; y ; z ; w) =
zx
=
y
2 2 xz
w y e
y
1 − zx
y
y
1 xz 2 2
g y=
e w xy + e x z 2 yw 2 x
( x; y ; z ; w)
xz
y
1 2x
= w 2 y 2 e xz +
z y
g z ( x; y ; z ; w) = −
= −
g w ( x; y ; z ; w) =
y
xz 2
y
xz
e
w 2 y3
z2
w 2 xy 2
y
e xz
y
2 xz
2wxy e
Derivadas parciales de orden superior
Sea f una función real de dos variables independientes con dominio
Dom ( f ) ⊂ 2 , tal que z = f ( x; y) . Las funciones derivadas parcia­
les de primer orden de f en cada punto ( x; y) ∈ Dom ( f ) , en caso de
que existan, son
f x ( x; y=
)
∂f ( x; y) ∂z
= = D1 f ( x; y)
∂x
∂x
f y ( x; y=
)
∂f ( x; y) ∂z
= = D2 f ( x; y)
∂y
∂y
Luego, las funciones derivadas parciales de segundo orden de f
en cada punto ( x; y) ∈ Dom ( f ) son las que se obtienen al derivar las
funciones derivadas parciales de primer orden con respecto a x o
con respecto a y según corresponda, en caso de que existan.
La derivada parcial de segundo orden con respecto a x dos
veces es
2
∂ ∂f ( x; y) ∂ f ( x; y) ∂ 2 z
=
= =
f xx ( x;=
y) D11 f ( x; y)
∂x ∂x
∂x 2
∂x 2
La derivada parcial de segundo orden con respecto a y dos
veces es
2
∂ ∂f ( x; y) ∂ f ( x; y) ∂ 2 z
=
= =
f yy ( x;=
y) D22 f ( x; y)
∂y ∂y
∂y 2
∂y 2
310
Cálculo II
Las derivadas parciales de segundo orden mixtas son:
Primero con respecto a x y luego con respecto a y
2
∂ ∂f ( x; y) ∂ f ( x; y) ∂ 2 z
=
= = f xy ( x=
; y) D12 f ( x; y)
∂y ∂x
∂y∂x
∂y∂x
Primero con respecto a y y luego con respecto a x
2
∂ ∂f ( x; y) ∂ f ( x; y) ∂ 2 z
=
= = f yx ( x=
; y) D21 f ( x; y)
∂x ∂y
∂x∂y
∂x∂y
Las funciones derivadas parciales de orden tres, orden cuatro y
así sucesivamente hasta el orden m, para funciones de dos o más
variables se obtienen de manera similar.
Por ejemplo, si w = f ( x; y; z) , la función derivada parcial de
orden cuatro de f, primero con respecto a z, luego dos veces con
respecto a x y finalmente una vez con respecto a y, se denota por
∂ 4 f ( x; y ; z)
=
f=
zxxy ( x; y ; z) D3112 f ( x; y ; z)
∂y∂x 2 ∂z
Ejemplo 12
Para cada una de las siguientes funciones, halle las funciones
derivadas parciales de segundo orden que se indican.
xy
a) f f( x( x; ;yy) )==xx3 3++yy3 3−−xy
2 3
g ( x g: y( x) =: ye)x =y e x
b)
; ; f xx
f xx( x( x; ;yy) )
2 3
y
;
c)h ( xh; (yx);=yln
ln (cos
) =(cos
(xy()xy
) ))
∂ 2 g (∂x2;gy()x; y)
;
∂y∂x∂y∂x
; D
; 22Dh22( xh;(yx); y)
Solución
Al aplicar las reglas y fórmulas de derivación se obtienen las fun­
ciones derivadas parciales de segundo orden de las funciones
f, g y h.
a)
b)
f x ( x; y)= 3x 2 − y ⇒ f xx ( x; y) = 6x
∂g ( x; y)
∂x
= ex
2 3
y
2 xy3
( ) ( 2xy ) + e ∂ ( 2xy )
( ) ∂y
2 3
x y
∂ 2 g ( x; y ) ∂ e
=
∂y∂x
∂y
x 2 y3
3
3
2 3
∂ 2 g ( x; y )
= 6xy 2 e x y x 2 y3 + 1
∂y∂x
(
)
Capítulo 5. Derivadas de funciones de varias variables
311
c)
D2 h ( x; y) =
−sen ( xy) x
cos ( xy)
= − xtan ( xy)
D22 h ( x; y) =
− xsec 2 ( xy) x =
− x 2 sec 2 ( xy)
Ejercicios y problemas resueltos 5.1
1.
Dada la función f ( x; y) = 3 x 2 + y 2 + 3 , utilice la definición de
derivada parcial en un punto para hallar f x (1; 2) y f y (−1; −2) .
Solución
a) Al aplicar la definición de derivada parcial de f con respecto
2 , resulta
a x en el punto (1; 2) ∈ Dom ( f ) =
2
3
f (1 + h; 2) − f (1; 2)
(1 + h) + 7 − 2
=
f x (1; 2) lim
= lim
h →0
h →0
h
h
− 2/3
1
2
. 2 (1 + h)
1 + h) + 7
(
1
= lim 3
=
h →0
1
6
L
´H
Luego,
f x (1; 2) =
1
.
6
b) De manera similar, al aplicar la definición de derivada parcial
de f con respecto a y en el punto (−1; − 2) , resulta
f y (−1; − 2) =
lim
f (−1; − 2 + h) − f (−1; − 2)
h
h →0
= lim
3
(−2 + h)2 + 4 − 2
h
h→0
2
−
1
2
−2 + h) + 4 3 . 2 (−2 + h)
(
1
= lim 3
= −
h→0
1
3
L
´H
1
Por lo tanto, f y (−1; − 2) =
− .
3
2.
Dada la función
(
)
4 sen x 2 + y 2
, si ( x; y) ≠ (0; 0)
f ( x; y ) =
x2 + y 2
, si ( x; y) = (0; 0)
4
a) Analice la continuidad de f en el punto (0; 0) .
b) Halle f x (0; 0) y f y (0; 0) en caso de que existan.
312
Cálculo II
Solución
a) Para determinar si f es una función continua en (0; 0) se
calcula el límite de f ( x; y) cuando ( x; y) tiende a (0; 0) , el
cual se compara con f (0; 0) . Así, se tiene
(
)
4sen x 2 + y 2 0
L =
lim f ( x; y)
lim
=
(x ; y) → (0;0)
( x ; y)→(0;0)
0
x2 + y 2
u x 2 + y 2 , donde u → 0
Al hacer el cambio de variable =
cuando ( x; y) → (0; 0) , resulta
L´H
4 cosu
4 senu
=
= lim
= 4
L lim
u→ 0
u→ 0
u
1
Luego
lim
(x ; y) → (0;0)
f ( x; y)= 4= f (0; 0) .
Por lo tanto, la función f es continua en (0; 0) .
b) Al aplicar la definición de derivada parcial de f con respecto
a x en el punto (0; 0) ∈ Dom ( f ) , se tiene
f (h; 0) − f (0; 0)
=
= lim
f x (0; 0) lim
h→0
h→0
h
(
)−4
4sen h 2 + 0
2
h +0
h
( )
( )
( )
( )
´H
sen h 2 − h 2 L
2hcos h 2 − 2h
= 4=
4
lim
lim
h→0
h→0
h3
3h 2
=
cos h 2 − 1 L´H 8
−2hsen h 2
8
=
=
lim
lim
0
h
3 h →0
3 h →0
1
Luego,
f x (0; 0) = 0.
De manera similar se tiene
f (0; h) − f (0; 0)
=
= lim
f y (0; 0) lim
h →0
h →0
h
( ) −4
4sen h 2
h
2
h
( )
sen h 2 − h 2
= 4=
lim
0
h →0
h3
Por lo tanto,
f y (0; 0) = 0 .
Capítulo 5. Derivadas de funciones de varias variables
313
3.
En economía algunos bienes son
clasificados como sustitutos o
complementarios en función de
cómo varía su demanda cuando
varían sus precios.
Dos bienes son complementarios
cuando se utilizan juntos y son
sustitutos cuando uno de ellos se
utiliza en lugar del otro.
Por ejemplo, son bienes sustitutos
la mantequilla y la margarina,
una casaca y una chompa, viajar
en avión y viajar en bus. En el
caso de los bienes sustitutos, si el
precio de uno de ellos aumenta,
entonces aumenta la demanda del
otro. Así, si el precio del pasaje en
avión aumenta, aumenta la de­
manda de pasajes en bus.
En un terminal pesquero de la ciudad de Lima se comerciali­
zan, entre otras, dos especies de pescados muy apreciados: el
lenguado y la corvina. Se sabe por experiencias anteriores que
la demanda semanal D de lenguado (en toneladas) depende de
los precios de venta x e y (en soles) de un kilogramo de lengua­
do y un kilogramo de corvina (bien sustituto) respectivamente,
según la función
D ( x; y) = 100 −
x2 y 2
+
20 30
a) Determine la demanda semanal de lenguado cuando el len­
guado y la corvina se venden a S/ 40 y S/ 30 el kilogramo
respectivamente.
b) Halle la razón de cambio de la demanda de lenguado con
respecto a los precios de venta x e y cuando el lenguado
y la corvina se venden a S/ 40 y S/ 30 el kilogramo respecti­
vamente.
Solución
a) Al reemplazar x = 40 e y = 30 en la función demanda del
lenguado, resulta
D (40; 30) =100 −
402 302
+
=50
20
30
Luego, cuando el lenguado y la corvina se venden a S/ 40
y S/ 30 el kilogramo respectivamente, la demanda semanal
de lenguado es de 50 toneladas.
b) Al derivar la función demanda con respecto a las variables
independientes x e y y evaluar en x = 40 e y = 30, se tiene
x
Dx ( x ; y ) =
− ⇒ Dx (40; 30) =
−4
10
y
2
Dy ( x; y ) =
⇒ Dy (40; 30) =
15
Por lo tanto, cuando el lenguado se vende a S/ 40 el kilo
y el precio de venta de la corvina permanece constante en
S/ 30 el kilo, la demanda semanal de lenguado disminuye
a razón de 4 toneladas por cada incremento de S/ 1 en el
precio de venta del kilo de lenguado.
De manera similar, cuando el precio de venta de 1 kilo
de lenguado se mantiene constante en S/ 40 y la corvina
se vende a S/ 30 el kilo, la demanda semanal de lenguado
aumenta a razón de 2 toneladas por cada incremento de
S/ 1 en el precio de venta de 1 kilo de corvina.
314
Cálculo II
4.
En una fábrica textil la producción diaria de telas (en cientos de
metros) se estima mediante la función
Q ( x; y) = 30 x1/ 2 y1/ 3
donde x es el capital invertido en insumos (en miles de soles) e
y es el tamaño de la fuerza laboral (en horas trabajador).
Determine e interprete Qx (900; 1000) y Qy (900; 1000) .
Solución
Al derivar la función producción con respecto a las variables
independientes x e y y evaluar en el punto (900; 1000) , se tiene
1/ 3
15 (1000)
15 x −1/ 2 y1/ 3 ⇒ Qx (900; 1000) =
Qx ( x ; y ) =
(900)1/ 2
5
=
1/ 2
10 (900)
10 x1/ 2 y − 2 / 3 ⇒ Qy (900; 1000) =
3
Qy ( x; y ) =
=
(1000)2/ 3
Por consiguiente, Qx (900; 1000) = 5 significa que cuando el
capital invertido en insumos es S/ 900 000 y el número de ho­
ras trabajador se mantiene constante en 1000, la producción
de tela aumenta a razón de 500 metros por cada S/ 1000 de
inversión adicional.
De manera similar, Qy (900; 1000) = 3 significa que cuan­
do el capital invertido en insumos se mantiene constante en
S/ 900 000 y el número de horas trabajador es 1000, la produc­
ción de tela aumenta a razón de 300 metros por cada hora tra­
bajador adicional.
5.
Halle las derivadas parciales de primer orden de cada una de
las siguientes funciones
a) f ( x; y) =xe 3xy +
2y
2
x −1
−
2 xy
x+3
b) g=
(x; y) xln (xy) + arctan (xy)
c) h ( x; y) =
∫
1
+3
y
1− x 2
et
2
+4
t 2 + 16
dt
d) i=
(x; y; z) xcos (xyz) + ye xz
Solución
Al aplicar las reglas y fórmulas de derivación, las deriva­
das parciales de primer orden de cada una de las funciones
dadas son
Capítulo 5. Derivadas de funciones de varias variables
315
a) f x ( x; y) =
e 3xy + xe 3xy . 3y −
=
e 3xy + 3xye 3xy −
4xy
(x2 − 1)
2
x −1
2
2
x −1
−
−
2
2
−
−
2 y ( x + 3) − 2xy (1)
(x + 3)2
6y
(x + 3)2
2x
x+3
2x
x+3
y
y
+
xy 1 + ( xy)2
b) gx ( x; y) = ln ( xy) + x .
= ln ( xy) + 1 +
(x2 − 1)
2
f y ( x; =
y) x e 3xy (3x) +
= 3x 2 e 3xy +
2 y ( 2 x)
y
1 + x2 y 2
x
x
x
x
g y ( x; y) =
x. +
=
+
2
2
xy 1 + x y
y 1 + x2 y 2
(1− x2 ) + 4
e
2
c)
hx ( x; y) =0 −
(1 − x2 )
2
1
+ 3 + 4
e y
2
+ 16
2x e x
(−2x) = 4
4
− 2 x2 +5
x − 2x 2 + 17
1
y2
6
+ +13
y
1
e
1
hy ( x ; y ) = 2
−
− 2 =
2
1 6
1
y
y
25
+
+
2
+ 3 + 16
y
y
y
d) i ( x;=
y ; z) cos ( xyz) + x (−sen ( xyz))( yz) + ye xz ( z)
x
=
cos ( xyz) − xyzsen ( xyz) + yze xz
i y ( x; y ; z) =
− xsen ( xyz)( xz) + e xz =
− x 2 zsen ( xyz) + e xz
i z ( x; y ; z) =
x (−sen ( xyz))( xy) + ye xz x =
− x 2 ysen ( xyz) + xye xz
6.
Halle la ecuación vectorial de la recta tangente a la curva de
intersección de la superficie
S : z =f ( x; y) =2 − x 2 + y 2 − 4x − 4 y + 16
con el plano Q : y = 4 , en el punto A (4; 4; − 2) .
Solución
Sea C la curva de intersección de la superficie S con el pla­
no Q. Dado que la curva C está contenida en el plano Q
316
Cálculo II
(figura 5.1.5), donde la ordenada y se mantiene constante, el
vector dirección de la recta tangente LT es a = (1; 0; f x (4; 4)) .
Z
z
Q
Al hallar la derivada parcial de f con respecto a x y evaluar
en el punto (4; 4) , se tiene
x−2
f x ( x; y ) = −
f x (4; 4) = −
Y
Xx
x 2 + y 2 − 4x − 4 y + 16
1
2
y
C
Luego, el vector dirección y la ecuación de la recta tangente
LT , en su forma vectorial, son respectivamente
Fig. 5.1.5
−1
a = 1; 0;
2
LT : ( x; y; =
z)
7.
( 4; 4;
−1
− 2) + t 1; 0;
, t ∈
2
Una recta tangente LT a la superficie
S : z = ( y − 3) e
xsen(3πy)
(
)
− ln x 2 y 2 + 4 +
2x2 y
1 + 4x
2
+ ln (68) −
32
17
en un punto donde la ordenada es 4, está contenida en un
plano Q paralelo al plano Y Z y tiene pendiente 1 − 6π.
a) Halle la ecuación del plano Q.
b) Determine la ecuación vectorial de la recta tangente LT .
Solución
a) Como el plano Q es paralelo al plano Y Z, su ecuación es de
la forma x = x0, donde x se mantiene constante. Luego, la pendiente de la recta tangente a la curva de intersección de la
superficie S con el plano Q en el punto A ( x0 ; 4; f ( x0 ; 4)) es
mT = f y ( x0 ; 4) = 1 − 6π
Al hallar la derivada parcial de f con respecto a y y evaluar en el punto ( x0 ; 4) , se tiene
f=
y ( x; y ) e
xsen(3πy)
[1 + 3πx ( y − 3) cos (3πy)] −
2 yx 2
+
2x2
x2 y 2 + 4 1 + 4x2
Luego
f y ( x0 ; 4) = 1 + 3πx0 −
2x0 2
+
2x0 2
4x0 2 + 1 1 + 4x0 2
= 1 − 6π ⇔ x0 = − 2
Por lo tanto, la ecuación del plano es
Q : x = −2.
Capítulo 5. Derivadas de funciones de varias variables
317
b) El punto de contacto de la recta tangente LT con la superficie
S es A (−2; 4; f (−2; 4)) , donde
f (−2; 4) =−
1 ln (68) +
32
32
+ ln (68) − =1
17
17
Además, el vector dirección de la recta tangente LT es
=
b 0; 1; f y (−2;=
4) (0; 1; 1 − 6π)
(
)
Por consiguiente, la ecuación vectorial de la recta tan­
gente LT a la superficie S en el punto A es
LT : ( x; y ; z) = (−2; 4; 1) + t (0; 1; 1 − 6π) , t ∈
8.
En un videojuego 3D una nave espacial se desplaza hacia arri­
ba (desde el plano XY ) a lo largo de la curva C , intersección
de la superficie
S:z =
f ( x; y ) =
−2x 2 − 4 y 2 + 8x + 24 y − 28
con el plano
Q : y = 4.
Esta nave solo se mueve en el primer octante y tiene la capa­
cidad de lanzar proyectiles que siguen la dirección de la recta
tangente en el punto donde se hace el disparo e impactan en el
plano Y Z. En este juego la misión de la nave es eliminar una
base enemiga que se encuentra en el punto D (0; 4; 22) .
a) Si la nave lanza un proyectil desde el punto B (4; 4; 4) , de­
termine si la nave cumple su misión.
b) Si su respuesta en a) es negativa, ¿desde qué punto A de la
curva C , debe la nave disparar el proyectil para cumplir su
misión?
Solución
a) Como la curva C está contenida en el plano Q : y = 4 , el
vector dirección de la recta tangente L1 a la curva C en el
punto B (4; 4; 4) es
a = (1; 0; f x (4; 4)) .
Al derivar f con respecto a la variable x y evaluar en el
punto (4; 4) , se tiene
f x ( x; y ) =
− 4x + 8 ⇒ f x (4; 4) =
−8
Así, el vector dirección de la recta L1 es
=
a (1; 0; −8) .
Luego, la ecuación vectorial de la recta L1 es
L1 : ( x; y ; z=
)
318
Cálculo II
(4; 4; 4) + t (1; 0;
−8) , t ∈
Para que el disparo de la nave dé en el blanco ubicado en
el punto D (0; 4; 22) , la recta tangente L1 debe pasar por
este punto, esto es, debe existir un único t ∈ para el cual
L1 : (0; 4; 22) =
(4; 4; 4) + t (1; 0;
−8)
4 + t =0 ⇒ t =− 4
⇔
4=
4
9
4 − 8t =22 ⇒ t =− 4
Como no existe un número real t que verifique las tres
ecuaciones, el disparo de la nave no destruye la base ene­
miga.
b) Dado que la respuesta en a) es negativa se debe encontrar
un punto A ( x0 ; 4; f ( x0 ; 4)) que pertenece a la curva C tal
que la recta tangente L2 a la curva C en dicho punto pase
por el punto D donde se encuentra la base enemiga.
El vector dirección de la recta tangente L2 es
=
b (1; 0; f x ( x=
0 ; 4)) (1; 0; 8 − 4 x0 )
el cual debe ser paralelo al vector
AD =
− x0 ; 0; 18 + 2x0 2 − 8x0
(− x0 ; 0; 22 − f (x0 ; 4)) =
)
Luego, existe un λ ∈ tal que
b =λ AD ⇔ (1; 0; 8 − 4x0 ) =λ − x0 ; 0; 18 + 2x0 2 − 8x0
)
(
(
1
1 =λ (− x )
⇒ λ=−
0
x0
⇔ 0 =
0
8 − 4x0 =
λ 18 + 2x0 2 − 8x0
(
Así, al reemplazar λ = −
)
1
en la tercera ecuación, resulta
x0
1
−
8 − 4x0 =
18 + 2x0 2 − 8x0 ⇔ x0 2 =
9
x0
(
)
Como A es un punto del primer octante
entonces
(x0 > 0) ,
x0 =
3 ∧ f (3; 4) =
10.
Por lo tanto, para destruir la base enemiga, la nave debe
efectuar el disparo desde el punto A (3; 4; 10) .
Capítulo 5. Derivadas de funciones de varias variables
319
9.
Dada la función
f ( x; y ) e y
=
2
−x
π
sen x 2 + y 2
8
(
)
halle las ecuaciones del plano tangente y de la recta normal a la
gráfica de f en el punto A (4; 2; 1) .
Solución
Para hallar las ecuaciones del plano tangente y de la recta nor­
mal a la gráfica de f en el punto A (4; 2; 1) se requiere del vec­
tor normal
=
n f x (4; 2) ; f y (4; 2) ; −1
(
)
Así, al hallar las derivadas parciales de primer orden de f y
evaluar en el punto (4; 2) , se tiene
2
π
π
f x ( x; y ) =
−e y − x sen x 2 + y 2 − cos x 2 + y 2
8
8
(
)
(
) π4x
f x (4; 2) = −1
f y ( x; y ) e y
=
2
−x
π 2
π 2
2
2 πy
2 ysen x + y + cos x + y
8
8
4
(
)
(
)
f y (4; 2) = 4
Así, el vector normal del plano tangente es n =
(−1; 4; −1) .
Por consiguiente, la ecuación general del plano tangente y
la ecuación vectorial de la recta normal a la gráfica de f en el
punto A (4; 2; 1) son respectivamente:
PT : −1( x − 4) + 4 ( y − 2) − 1( z − 1) = 0 ⇔ PT : x − 4 y + z + 3 = 0
LN : ( x; y=
; z)
(4; 2; 1) + t (−1; 4; −1) , t ∈
10. Halle la ecuación del plano tangente a la superficie
(
)
S:z =
f ( x; y ) =
x2 + y 2 e 2 y + 2x − 1
que es paralelo al plano coordenado XY .
Solución
Para determinar la ecuación del plano tangente a la superficie
S se requieren el punto de tangencia B ( x0 ; y0 ; f ( x0 ; y0 )) y el
vector normal
=
n f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1
(
)
Al hallar las derivadas parciales de primer orden de f y eva­
luar en el punto ( x0 ; y0 ) , se tiene
320
Cálculo II
f x ( x0 ;=
y0 ) 2x0 e
2 y0 + 2 x0
f y ( x0 ;=
y0 ) 2 y0 e
2 y0 + 2 x0
(
) 2y +2x
2y +2x
+ 2 ( x0 2 + y0 2 ) e
+ 2 x0 2 + y0 2 e
0
0
0
0
Además, dado que el plano tangente es paralelo al plano
XY , el vector normal n del plano tangente es paralelo al vector
normal n1 del plano XY , es decir
n n1 ⇔ n =
λ n1 ⇔ f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1 =
λ (0; 0; 1)
(
)
de donde, por la relación de igualdad de vectores, se tiene
x0 + x0 2 + y0 2 =
0
⇔ y0 + x0 2 + y0 2 =0 ⇒ x0 =y0
λ = −1
Al reemplazar y0 = x0 en una de las ecuaciones resulta
x0 + x0 2 + x0 2 =0 ⇔ x0 (1 + 2x0 ) =0 ⇔ x0 =0 ó x0 =−
1
2
Así, hay dos puntos de la superficie donde el plano tangente
es horizontal (paralelo al plano XY ); estos son
1 1 −2
1
B1 =
(0; 0; −1) y B2 =−
; − ; e − 1
2
2 2
Por lo tanto, Las ecuaciones de los planos tangentes
horizontales a la superficie S en los puntos B1 y B2 son respectivamente
(PT )1 : z =
−1
:z
(PT )=
2
1 −2
e −1
2
11. Halle la ecuación del plano tangente a la superficie
(
)
S :=
z f ( x; y=
) ln x2 + y 2 − 7 + 1
que es paralelo al plano Q : 4x − 4 y + z − 3 =
0.
Solución
Para determinar la ecuación del plano tangente a la superficie
S se requieren el punto de tangencia B ( x0 ; y0 ; f ( x0 ; y0 )) y el
vector normal
=
n f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1
(
)
Al hallar las derivadas parciales de primer orden de f y
evaluar en el punto ( x0 ; y0 ) , se tiene
Capítulo 5. Derivadas de funciones de varias variables
321
f x ( x; y ) =
f y ( x; y ) =
2x
2
2
x + y −7
2y
2
2
x + y −7
⇒ f x ( x0 ; y0 ) =
⇒ f y ( x0 ; y0 ) =
2
2x0
x0 + y0 2 − 7
2
2 y0
x0 + y0 2 − 7
Además, dado que el plano tangente es paralelo al plano Q,
el vector normal n es paralelo al vector n=
(4; − 4; 1) . Luego,
Q
existe un número real λ tal que
n=
λ nQ ⇔ f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1 =
λ (4; − 4; 1)
(
)
2x0
2 y0
⇔ 2
;
; −1 = (4λ; − 4λ; λ)
x + y 2 −7 x 2 + y 2 −7
0
0
0
0
De esta igualdad de vectores se obtiene el siguiente sistema
de ecuaciones
2x0
=
4λ
2
x0 + y0 2 − 7
⋅
y
2
0
=−4λ
2
2
+
−
x
y
7
0
0
⋅
−1 =λ
…(1)
…(2)
Al reemplazar λ = −1 en las ecuaciones (1) y (2), se obtiene
(
)
…(3)
(
)
…(4)
x + 2 x 2 + y 2 − 7= 0
0
0
0
.
y − 2 x 2 + y 2 − 7= 0
0
0
0
Al sumar (3) y (4) resulta y0 = − x0 que, al sustituir en (3),
0,
genera la ecuación de segundo grado 4 x0 2 + x0 − 14 =
de donde
7
x0 =
− 2 o x0 =
4
Así, las soluciones del sistema de ecuaciones son
(x0 ; y0 ) =−
( 2; 2)
7 7
y ( x0 ; y0 ) =
; − ∉ Dom ( f )
4 4
Luego, el punto de tangencia es B ( −2; 2; 1) .
322
Cálculo II
Por consiguiente, la ecuación del plano tangente a la
superficie S en el punto B (−2; 2; 1) y con vector normal
n=
(4; − 4; 1) es
Q
PT : 4x − 4 y + z + 15 =
0
12. Dadas las superficies
S1 : z =f ( x; y) =−3 + − y 2 + 4 y − 4x − 8
S2 : z =g ( x; y) =
− − x2 − y 2 − 2x + 4 y − 3
a) Pruebe que estas superficies son tangentes entre sí en el
punto A(–2; 2; –1), es decir, tienen el mismo plano tangente
en dicho punto.
b) Halle la ecuación vectorial de la recta normal a las superfi­
cies S1 y S2 en el punto de contacto A.
Solución
a) Los vectores normales de los planos tangentes a las superfi­
cies S1 y S2 en el punto A (−2; 2; −1) son respectivamente
n1 =f x (−2; 2) ; f y (−2; 2) ; −1 y
n2 =gx (−2; 2) ; g y (−2; 2) ; −1
(
(
)
)
Al hallar las derivadas parciales de primer orden de f y g
y evaluar en el punto (−2; 2) se tiene
−2
f x ( x; y ) =
⇒ f x (−2; 2) =
−1
− y 2 + 4 y − 4x − 8
=
f y ( x; y )
−y + 2
=
⇒ f y (−2; 2) 0
− y 2 + 4 y − 4x − 8
x +1
g x ( x; y ) =
⇒ gx (−2; 2) =
−1
− x2 − y 2 − 2x + 4 y − 3
=
g y ( x; y )
y−2
=
⇒ g y (−2; 2) 0
− x2 − y 2 − 2x + 4 y − 3
Luego, los vectores normales de los planos tangentes a
las superficies S1 y S2 en el punto A(–2; 2; –1) son
n1 =
(−1; 0; −1) y n2 =
(−1; 0; −1)
Por consiguiente, el plano tangente a ambas superficies
S1 y S2 en el punto de contacto A(–2; 2; –1) es
PT : x + z + 3 =
0.
Capítulo 5. Derivadas de funciones de varias variables
323
b) La ecuación vectorial de la recta normal a las superficies S1
y S2 en el punto de contacto A (−2; 2; −1) es
LN : ( x; y; z) =(−2; 2; −1) + t (−1; 0; −1) , t ∈
13. Determine la ecuación vectorial de la recta que es tangente a la
curva de intersección de las superficies
S1 : z =f ( x; y) =
3 + x − 3 y S2 : z =
g ( x; y) =+
3 3 y−3
en el punto B (4; 4; 4) .
Solución
La recta L que es tangente a la curva de intersección de las su­
perficies S1 y S2 está contenida tanto en el plano tangente a S1
en el punto B (4; 4; 4) como en el plano tangente a S2 en
B (4; 4; 4) . Luego, el vector dirección a de la recta L es perpen­
dicular al vector normal
=
n1 f x (4; 4) ; f y (4; 4) ; −1 del plano tangente a S1 y al vector
=
normal n2 gx (4; 4) ; g y (4; 4) ; −1 del plano tangente a S2 ;
esto es a b donde b= n1 × n2 .
(
)
(
)
Al determinar las derivadas parciales de primer orden de f
y g, y evaluar en el punto (4; 4) , , se tiene
f x=
( x; y )
1
⇒ f x=
(4; 4)
2 x−3
1
2
f=
y ( x; y ) 0
⇒ =
f y (4; 4) 0
gx=
( x; y ) 0
⇒ g=
x ( 4; 4) 0
g y ( x=
; y)
1
3 3 ( y − 3)
2
⇒ g y (4=
; 4)
1
3
Así, los vectores de los planos tangentes a las superficies S1
y S2 en el punto B (4; 4; 4) son
1
1
=
n1 ; 0; −=
1
(1; 0; − 2) y
2
2
1
1
=
n2 0; ; −=
1
(0,1; − 3)
3
3
Luego, el vector dirección b de la recta tangente es
i j k
1
1
b = n1 × n2 = 1 0 −2 = (2; 3; 1)
6
6
0 1 −3
324
Cálculo II
Por consiguiente, la ecuación vectorial de la recta tangente
a la curva de intersección de las superficies S1 y S2 en el punto
B(4; 4; 4) es
LT : ( x; y ; z) =
(4; 4; 4) + t (2; 3; 1) , t ∈
el centro de distribución A, e “y” soles el
precio de venta de cada unidad del mismo
producto en B, las demandas semanales del
producto en los centros A y B son respecti­
vamente 100 − 5x + 12 y y 200 + 6x − 10 y uni­
dades del producto.
Ejercicios y problemas propuestos 5.1
1.
Dadas las funciones
f ( x; y ) =
x 2 + y 2 − 1 , g ( x; y ) =
xy
x+y
a) Determine la función que expresa el in­
greso semanal I ( x; y) de la empresa por
la venta de dicho producto en los centros
A y B en función de x e y.
utilice la definición de derivada parcial en
un punto para calcular
a) f x (2; 1) y f y (2;1)
2.
b) gx (2; 2) y g y (2; 2)
b) Calcule e interprete I x (5; 6) .
Dada la función
2 xy
, si ( x; y) ≠ (0; 0)
f ( x; y ) = x 2 + y 2
si ( x; y) = (0; 0)
0,
4.
a) Muestre que f no es continua en (0; 0) .
b) Use la definición de derivada parcial
en un punto para calcular f x (0; 0) y
f y (0; 0) .
V = 90 x1/ 4 y3/ 4
Si la utilidad anual es igual al 10% de las
ventas menos el gasto anual en publicidad
en periódicos y televisión:
Nota: observe que la función f no es con­
tinua en el punto (0; 0) y sin embargo las
derivadas parciales de primer orden de f en
(0; 0) existen.
3.
La empresa AGRO S.A. comercializa dos
productos en dos centros de distribución di­
ferentes, A y B. Por la distancia que existe en­
tre los dos centros de distribución, el precio
de venta que se elija en uno de ellos genera
disturbios en la demanda del otro y vicever­
sa. Así, si se considera x soles como precio
de venta para cada unidad del producto en
El departamento de marketing de una empre­
sa estima que si se gastan x miles de soles
anuales en publicidad en periódicos e y mi­
les de soles anuales en publicidad en tele­
visión, las ventas anuales en miles de soles
estarán dadas por
a) Halle una función que exprese la utilidad
anual U (en miles de soles) en términos
de x e y.
b) Calcule e interprete U x (16; 16) .
5.
Halle las funciones derivadas parciales de
primer orden de cada una de las siguientes
funciones
(
a) f ( x; y) = ln x + x 2 + y 2
)
Capítulo 5. Derivadas de funciones de varias variables
325
10. Determine la ecuación vectorial de la recta
x
y cos
b)=
f ( x; y) arctan + e y
x
6.
7.
tangente a la curva de intersección de la su­
perficie
c) j ( x; y=
; z) xe xz + ye yz
πy
sen πxy
=
z 2xye ( ) +
+ πx
2
Dada la función f ( x;=
y) ln ( x − y) , ¿existe
f x (1; 2) ?
con el plano
Una función f es homogénea de grado n
(n ∈ ) , si para cualquier número k mayor
que cero, se verifica
f ( kx; ky) = k f ( x; y)
n
Verifique que las siguientes funciones
son homogéneas
c) f ( x; y) =
8.
x2
Verifique que cada una de las funciones
homogéneas del problema 7 satisface la
ecuación
donde n es el grado de homogeneidad de la
función f.
ycos(3πx)
− 5 y 2 + g ( x; y )
g ( x; y ) =
− arctan (2xy) +
2 xy
1+ y
2
Una recta tangente a S está en un plano
Q paralelo al plano XZ y tiene pendiente
9π. Si el punto de contacto tiene abscisa
x = 1 / 2, determine la ecuación del plano Q.
Cálculo II
punto A (1; 2; 3) y que es tangente a la curva
de intersección de la superficie de ecuación
z = f ( x; y ) = x 2 + y 2 − 2
=
a) z f =
( x; y )
16
π 2
arctan ( y + 1) cos ( x − πy)
π
P0 ; 0; 2
4
2
2
x
z g ( x=
; y) e x ln ( y − 1) + arcsen
b)=
π
2
P0 (0; 2; 1)
c) z h=
=
( x; y )
Sea S la superficie dada por
donde
326
11. Halle la ecuación de la recta que pasa por el
y de la recta normal a cada una de las super­
ficies dadas en el punto especificado
y
x 2 ye x
=
z f ( x; y=
) e
1
A ; 1; 1 . ¿En qué punto interseca esta
2
recta tangente al plano XZ ?
12. Encuentre las ecuaciones del plano tangente
x2 + y 2
x f x ( x; y) + yf y ( x; y) =
n f ( x; y)
9.
en el punto
con el plano Q : y = 2.
a) f ( x; y) = 2x 2 + 4xy + 6 y 2
b) f ( x; y) =
P : x =1/ 2
πx
tan3 + 3e y
4
P0 (1; 0; 2)
13. Determine la ecuación del plano tangente
a la superficie S : z =f ( x; y) =x 2 − 3xy + y 2 ,
paralelo al plano Q : 2x − 8y − 2z + 5 =
0.
14. Verifique que cualquier plano tangente a la
8
forma con los
xy
planos coordenados un tetraedro cuyo volu­
men es constante.
superficie
=
S : z f=
( x; y )
15. La energía cinética de un cuerpo con masa m
y velocidad v es E = 0 , 5 mv 2 . Verifique que
∂E ∂ 2 E
.
=E
∂m ∂v 2
16. Verifique que la función f dada por
z =f ( x; y) =5 − ln
( (x − 1) + (y − 2) )
2
2
satisface la ecuación de Laplace
∂2 z
∂x 2
+
∂2 z
∂y 2
=
0
17. Sea la función g dada =
por z g=
( x; y ) 5x y .
Determine
∂2z
∂x 2
+
∂2z ∂2z
+
∂y∂x ∂y 2
Capítulo 5. Derivadas de funciones de varias variables
327
5.2 Diferencial de una función de varias variables
En esta sección se generalizan los conceptos de incremento y di­
ferencial de una función real de una variable real a una función
real de varias variables reales con el objetivo de estimar la variación
del valor de la variable dependiente cuando las variables indepen­
dientes varían en cantidades relativamente pequeñas. Esta forma de
estimar la variación del valor de una función de varias variables se
utiliza para resolver problemas sobre incrementos.
Definición 1. Incremento total de una función
Sean f una función de dos variables con Dom ( f ) ⊂ 2 , ∆ x y ∆ y
incrementos de las variables x e y.
El incremento total de la variable dependiente z = f ( x; y) en el
punto ( x0 ; y0 ) ∈ Dom ( f ) está dado por
∆ z = ∆ f ( x0 ; y0 ) = f ( x0 + ∆ x; y0 + ∆ y) − f ( x0 ; y0 )
Interpretación geométrica
En la figura 5.2.1 se muestra la interpretación geométrica de este
concepto.
Sean P ( x0 ; y0 ; f ( x0 ; y0 )) y Q ( x0 + ∆ x; y0 + ∆ y; f ( x0 + ∆ x; y0 + ∆ y))
puntos de la superficie S : z = f ( x; y) . En la figura 5.2.1 se mues­
tra que el incremento total ∆ z es la diferencia de las cotas de los
puntos Q y P.
Z
f ( x0 + ∆ x; y0 + ∆ y)
∆z
Q
f ( x0 ; y0 )
x0
∆x
x0 + ∆ x
X
P
0
y 0 ∆ y y0 + ∆ y
(x0 ; y0 ; 0)
(x0 + ∆ x; y0 + ∆ y; 0)
Fig. 5.2.1
328
Cálculo II
Y
Ejemplo 1
Dada la función f definida por
z =f ( x; y) =x 2 − 4xy + y 2
calcule el incremento total de z en el punto (1; −1) cuando x varía
de 1 a 1, 02 e y varía de −1 a −1, 01.
Solución
Para determinar el incremento total de la variable dependiente
z se requieren los incrementos de las variables independientes
x e y.
∆ x =1, 02 − 1 =0, 02, ∆ y =−1, 01 − (−1) =− 0, 01
Luego, el incremento total de z = f ( x; y) en el punto (1; −1) es
∆ z = ∆ f (1; −1) = f (1 + ∆ x; −1 + ∆ y) − f (1; −1)
= f (1, 02; −1, 01) − f (1; −1)
2
2
= (1, 02) − 4 (1, 02)(−1, 01) + (−1, 01) − 6
= 6,1813=
− 6 0 ,1813
Por consiguiente, cuando el punto ( x; y) cambia de (1; −1) a
(1, 02; −1, 01) , la variable dependiente z aumenta en 0,1813.
La definición de incremento total se extiende a una función de
n variables del modo que se define a continuación.
Definición 2
Sean f una función de n variables con Dom ( f ) ⊂ n y ∆ x1 , … , ∆ xn
los incrementos en las variables x1 , … , xn . El incremento total
de la variable dependiente
=
z f ( x1 ; …; xn ) en cualquier punto
(x1 ; …; xn ) ∈ Dom ( f ) es dado por
∆ z = ∆ f ( x1 ; …; xn ) = f ( x1 + ∆ x1 ; …; xn + ∆ xn ) − f ( x1 ; …; xn )
Ejemplo 2
Dada la función f definida por
w = f ( x; y; z) = 2x 2 − 3xy + z 2 − 2x − z
calcule el incremento total de w en el punto (1; 0; − 2) cuando
x varía de 1 a 0, 9 , y varía de 0 a 0 , 01 y z varía de − 2 a −1, 9.
Solución
Para determinar el incremento total de la variable dependiente
w se requieren los incrementos de las variables independientes
x, y y z.
Capítulo 5. Derivadas de funciones de varias variables
329
∆ x =0 , 9 − 1 =− 0 ,1
∆ y= 0 , 01 − =
0 0 , 01
∆ z =−1, 9 − (−2) =0,1
Luego, el incremento total de w = f ( x; y; z) en el punto
1
;
( 0; − 2) es
∆ w =∆ f (1; 0; − 2) = f (1 + ∆ x; 0 + ∆ y; − 2 + ∆ z) − f (1; 0; − 2)
=f (0 , 9; 0, 01; −1, 9) − f (1; 0; − 2) =5, 303 − 6 =− 0, 697
Por consiguiente, cuando el punto (1; 0; − 2) cambia a
−1, 9) la variable dependiente w disminuye en 0 , 697.
(0, 9; 0, 01;
Definición 3. Diferencial total
Sean f una función real de dos variables con Dom ( f ) ⊂ 2 , ∆ x y
∆ y incrementos de las variables independientes x e y.
a) Los diferenciales de las variables independientes x e y son
dx =
∆ x , dy =
∆y
b) El diferencial total de la función f en cada punto
(x; y) ∈ Dom ( f ) , donde las derivadas parciales de primer
orden f x ( x; y) y f y ( x; y) existen, es dado por
=
df ( x; y) f x ( x; y) dx + f y ( x; y) dy
En la figura 5.2.2 se muestra la interpretación del diferen­
cial total en el punto ( x0 ; y0 ) .
Z
Q
Q ( x0 + ∆ x; y0 + ∆ y; f ( x0 + ∆ x; y0 + ∆ y))
P ( x0 ; y0 ; f ( x0 ; y0 ))
P
y0
0
x0
X
Fig. 5.2.2
Cálculo II
∆z
y0 + ∆ y
Y
x0 + ∆ x
330
dx
Ejemplo 3
Halle el diferencial total de cada una de las siguientes funciones
a)
(
)
f ( x; y=
) sen x2 + y 2 + arctan (xy)
(
b) g ( x; y) =xe xy + ln x 4 + y 4
)
Solución
Al aplicar las fórmulas y reglas de derivación, los diferenciales
totales de las funciones f y g son:
df ( x; y) f x ( x; y) dx + f y ( x; y) dy
a) =
y
x
= 2xcos x 2 + y 2 +
dx + 2 ycos x 2 + y 2 +
dy
2 2
1 + x y
1 + x 2 y 2
(
)
(
)
dg ( x; y) gx ( x; y) dx + g y ( x; y) dy
b) =
xy
2 xy
4 y3
4 x3
xy
=
e
+
xye
+
dx
+
x
e
+
dy
x 4 + y 4
x 4 + y 4
La definición 3 se extiende a una función de n variables como
se presenta a continuación.
Definición 4
Sean f una función de n variables con Dom ( f ) ⊂ n , y
∆ x1 , … , ∆ xn los incrementos en las variables x1 , ..., xn .
a) Los diferenciales de las variables independientes x1 , …, xn son
dx1 =
∆ x1 , … , dxn =
∆xn
b) El diferencial total de la función f en el punto ( x1 ; …; xn ) del
dominio de f, donde las derivadas parciales de primer orden
f x ( x1 ; …; xn ) , i= 1, … , n existen, es dado por
i
df ( x1 ; …=
; xn ) f x ( x1 ; …; xn ) dx1 + … + f x ( x1 ; …; xn ) dxn
n
1
Ejemplo 4
Halle el diferencial total de la función
h ( x; y ; z) = x3 y + y 3 z + z 3 x
Solución
Al aplicar las fórmulas y reglas de derivación, el diferencial total
de la función h en el punto ( x; y ; z)∈ Dom (h) es
dh ( x; y; z) = hx ( x; y; z) dx + hy ( x; y; z) dy + hz ( x; y ; z) dz
(
)
(
)
(
)
= 3x 2 y + z3 dx + x3 + 3y 2 z dy + y3 + 3z 2 x dz
Capítulo 5. Derivadas de funciones de varias variables
331
Definición 5. Diferenciabilidad de una función
Sean f una función de dos variables con Dom ( f ) ⊂ 2 , ∆ x y ∆ y
incrementos de las variables x e y.
La función f es diferenciable en el punto ( x0 ; y0 ) ∈ Dom ( f ) , si
a) Las derivadas parciales f x ( x0 ; y0 ) y f y ( x0 ; y0 ) existen.
Nota
b)
Cuando la función f es diferenciable
en el punto ( x0 ; y0 ) y ∆ x y ∆ y
son muy pequeños, se tiene
∆ f (=
x0 ; y0 ) f x ( x0 ; y0 ) ∆ x + f y ( x0 ; y0 ) ∆ y + E1 (∆ x; ∆ y) ∆ x + E2 (∆ x; ∆ y) ∆y
donde
lim
∆ f ( x0 ; y0 ) ≅ df ( x0 ; y0 )
(∆x ; ∆y) →(0;0)
Ei (∆ x; ∆ y=
) 0
=
(i 1, 2)
En general, se dice que una función f de dos variables reales es
diferenciable en el conjunto D ⊂ Dom ( f ) si f es diferenciable en
cada punto ( x; y) ∈ D .
Ejemplo 5
; y) 2 x 2 y − 3y 2 es diferenciable en
Pruebe que la función f ( x=
2 .
cada punto ( x; y) ∈ Dom ( f ) =
Solución
Sean ( x; y) un punto cualquiera de Dom ( f ) = 2 , ∆ x y ∆ y los
correspondientes incrementos de x e y. Luego, se tiene
i) Las derivadas parciales de primer orden de f
f x ( x;=
y ) 4 xy , f y ( x;=
y ) 2 x2 − 6 y
existen para cada punto ( x; y ) ∈ .
2
ii) Para cada punto ( x; y) ∈ 2 , se tiene
∆ f ( x;=
y ) f ( x + ∆ x; y + ∆ y ) − f ( x; y )
2
2
= 2 ( x + ∆ x) ( y + ∆ y) − 3 ( y + ∆ y) − 2x 2 y − 3y 2
(
)
2
2
= 4xy ∆ x + 2x 2 − 6 y ∆ y + 4x∆ x∆ y + 2 y (∆ x) + 2 (∆ x) ∆ y − 3 (∆ y)
2
2
= f x ( x; y) ∆ x + f y ( x; y) ∆ y + [4x∆ y + 2 y∆ x] ∆ x + 2 (∆ x) − 3∆ y ∆ y
2
Al tomar E1 (∆ x; ∆ y) = 4x∆ y + 2 y∆ x y E2 (∆ x; ∆ y) = 2 (∆ x) − 3∆ y
se tiene
lim
=
E1 (∆ x; ∆ y)
lim
=
E2 (∆ x; ∆ y)
(∆ x ; ∆ y) → (0; 0)
(∆ x ; ∆ y) → (0; 0)
lim
(∆ x ; ∆ y) → (0; 0)
lim
∆ y + 2 y∆ x]
[4x=
0
2
2 (∆
=
x) − 3∆ y 0
(∆ x ; ∆ y) → (0; 0)
Por lo tanto, la función f es diferenciable en cada punto
(x; y) ∈ 2 .
332
Cálculo II
Teorema 1
Sea f una función de dos variables con Dom ( f ) ⊂ 2 tal que
z = f ( x; y) . Si la función f es diferenciable en el punto ( x0 ; y0 ) de
su dominio, entonces f es continua en ( x0 ; y0 ) .
Demostración
Dado que f es diferenciable en el punto ( x0 ; y0 ) ∈ Dom ( f ) , entonces
existen f x ( x0 ; y0 ) y f y ( x0 ; y0 ) y
=
L f ( x0 + ∆ x; y0 + ∆=
y) f ( x0 ; y0 ) + ∆ f ( x0 ; y0 )
= f ( x0 ; y0 ) + f x ( x0 ; y0 ) ∆ x + f y ( x0 ; y0 ) ∆ y + E1 (∆ x; ∆ y) ∆ x + E2 (∆ x; ∆ y) ∆ y
Como ∆ x = x − x0 y ∆ y = y − y0 , resulta que x0 + ∆ x = x y
y0 + ∆ y = y y así L = f ( x; y)
Luego, al tomar límite cuando ( x; y) tiende a ( x0 ; y0 ) se tiene
lim
(x ; y) → (x0 ; y0 )
f ( x; y) = f ( x0 ; y0 )
Por consiguiente, la función f es continua en el punto ( x0 ; y0 ) .
Ejemplo 6
; y)
4x 2 + 9 y 2 es con­
Verifique que la función f dada por f ( x=
tinua en el punto (0; 0) , pero no es diferenciable en (0; 0) .
Solución
a) La función f es continua en el punto (0; 0) pues se cumple
lim
( x ; y) → (0; 0)
f ( x; y) = lim
( x ; y) → (0; 0)
Nota
h
no existe, pues
lim
h →0 h
4 x 2 + 9 y 2 ==
0 f (0; 0)
b) Al determinar las derivadas parciales de primer orden de f en
(0; 0) se tiene
2 h
f (h; 0) − f (0; 0)
=
=
lim
=
f x (0; 0) lim
h
h →0
h
→
0
h
h
2 lim
h →0 h
lim
h→0
−
lim
h→0
+
h
h
h
h
= −1 y
= 1.
Este límite no existe
3 h
f (0; h) − f (0; 0)
=
=
lim
=
f y (0; 0) lim
h →0
h
h →0 h
h
3 lim
h →0 h
Este límite no existe
Por lo tanto, como las derivadas parciales de primer orden
de f no existen en (0; 0) , la función f no es diferenciable en
dicho punto.
Capítulo 5. Derivadas de funciones de varias variables
333
Teorema 2. Condición suficiente para diferenciabilidad
Sea f una función real con Dom ( f ) ⊂ 2 tal que z = f ( x; y) . La fun­
ción f es diferenciable en el conjunto D ⊂ Dom ( f ) si las funciones
derivadas parciales de primer orden f x ( x; y) y f y ( x; y) existen y
son continuas en cada punto ( x; y) ∈ D.
Definición 6
Sean f una función de n variables con Dom ( f ) ⊂ n , y ∆ x1 , … , ∆ xn
los incrementos en las variables x1 , … , xn .
La función f es diferenciable en el punto ( x1 ; …; xn ) ∈ Dom ( f ) si
a) Las derivadas parciales de primer orden
f x ( x1 ; …; xn ) , i =
1, … , n existen.
i
b)
lim
(∆ x1 ; …; ∆ xn )→(0; …; 0)
0
[∆ f (x1 ; …; xn ) − df (x1 ; …; xn )] =
Observación 1
Sea f una función diferenciable de n variables con Dom ( f ) ⊂ n. Si
∆ x1 , … , ∆ xn son los incrementos muy pequeños de las variables
x1 , … , xn , entonces para cada ( x1 ; …; xn ) ∈ Dom ( f ) se tiene
∆ f ( x1 ; …; xn ) ≅ df ( x1 ; …; xn )
Esto equivale a que
f ( x1 + ∆ x1 ; …; xn + ∆ xn ) − f ( x1 ; …; xn ) ≅ df ( x1 ; …; xn )
es decir,
f ( x1 + ∆ x1 ; …; xn + ∆ xn ) ≅ f ( x1 ; …; xn ) + df ( x1 ; …; xn )
Este último resultado se utiliza para hallar los valores de f en
puntos cercanos al punto ( x1 ; …; xn ) .
Ejemplo 7
Sea f una función dada por
f ( x; =
y)
3
x + ey
a) Calcule f (8; 0).
b) Utilice el diferencial total para calcular un valor aproximado
de
=
K
3
7 , 98 + e 0 ,02
Solución
a) f (8; 0) = 3 8 + e 0 = 2 + 1 = 3.
334
Cálculo II
b) Como el punto (7 , 98; 0, 02) es cercano al punto (8; 0) , para
determinar un valor aproximado de K se utiliza la observa­
ción 1. Así, los incrementos en las variables x e y son
∆ x =dx =7 , 98 − 8 =− 0, 02
∆ y = dy = 0 , 02 − 0 = 0 , 02
Además, las derivadas parciales de primer orden de f en
8
;
( 0) resultan
1
1
f x ( x; y ) =
⇒ f x (8; 0) =
3 2
12
3 x
f y ( x; y ) =
e y ⇒ f y (8; 0) =
1
Luego, se tiene
1
df (8; 0) = (− 0, 02) + (1)(0, 02) =
0, 0183
12
Por lo tanto, un valor aproximado de K es
=
K f (7 , 98; 0, 02) ≅ f (8; 0) + df (=
8; 0) 3, 0183
Ejemplo 8
La utilidad mensual (en soles) de una empresa que comercia­
liza telas en las ciudades de Arequipa y Lima está dada por
la función
U ( x; y ) =
5xy + x 2
1000
donde x e y representan el número de metros de tela vendidos al
mes en las ciudades de Arequipa y Lima respectivamente. Si el
mes pasado se vendieron 15 000 metros de telas en Arequipa y
16 000 metros de tela en Lima, utilice diferenciales para estimar
el cambio aproximado que se produce en la utilidad mensual de
la empresa si las ventas en el presente mes en Arequipa disminu­
yen en un 0, 4 % y en Lima aumentan en 1 %.
Solución
Dado que las ventas mensuales de la empresa en la ciudad de
Arequipa disminuyen en un 0, 4 % y las ventas en la ciudad de
Lima aumentan en 1 %, se tiene
x = 15 000, dx =∆ x =−15 000 (0, 004) =− 60
16 000 (0 , 01) =
160
y = 16 000, dy =∆ y =
Capítulo 5. Derivadas de funciones de varias variables
335
Luego, el cambio aproximado que se produce en la utilidad
mensual de la empresa es
dU (15 000; 16 000) = U x (15000; 16000) dx + U y (15000; 16000) dy …(* )
Al determinar las derivadas parciales de primer orden de U
y evaluar en el punto (15 000; 16 000) , resulta
U x ( x;=
y)
1
=
(5y + 2x) ⇒ U x (15 000; 16 000
) 110
1000
1
U y ( x; y ) =
75
(5x) ⇒ U y (15 000; 16 000) =
1000
Al reemplazar estos valores y los diferenciales de x e y en
(*) , se tiene
dU (15000; 16000) = 110 (− 60) + (75)(160) = 5400
Por lo tanto, si las ventas en el presente mes en Arequipa dis­
minuyen en un 0, 4 % y en Lima aumentan en 1 %, la utilidad
mensual de la empresa aumenta aproximadamente en S/. 5400.
Propagación de errores
Sea f una función real con Dom ( f ) ⊂ 2 tal que z = f ( x; y) .
El diferencial total de la función f se utiliza para estimar el error
propagado en la variable dependiente z = f ( x; y) cuando se come­
ten errores en las mediciones de las variables independientes x e y.
Luego, si x e y son las medidas de las variables independientes
con errores de medición máximos ∆ x y ∆ y respectivamente, en­
tonces el error propagado al calcular el valor de la variable depen­
diente z = f ( x; y) es
∆z =
∆ f ( x; y ) = f ( x + ∆ x; y + ∆ y ) − f ( x; y )
Error propagado
Valor exacto
Valor calculado
El error propagado en la variable dependiente z = f ( x; y) se
estima mediante el diferencial total de z, es decir,
∆ z =∆ f ( x; y) ≅ dz =df ( x; y) =f x ( x; y) dx + f y ( x; y) dy
Así, los errores absolutos en las variables independientes y
dependientes son
= dx
EEAA(x)( x=)dx
= dy
Errores absolutos EEAA(y)( y=)dy
EEAA(z)( z≈)dz≈ dz
336
Cálculo II
Para determinar la magnitud del error propagado en la variable
z con relación al valor de esta variable se utiliza el error relativo y el
error porcentual. Así, los errores relativos y porcentuales, tanto en
las variables independientes como en la variable dependiente, son
Errores relativos
dx
ER ( x) = x
dy
ER ( y) =
y
dz
ER ( z) ≈
z
dx
EP ( x) = x (100 ) %
dy
Errores porcentuales EP ( y) = (100 ) %
y
dz
EP ( z) ≈ (100 ) %
z
Ejemplo 9
Un depósito de granos se construye uniendo una semiesfera a un
cilindro circular recto tal como se muestra en la figura adjunta.
Al medir el radio y la altura del cilindro se obtienen r = 4 m y
h = 6 m con posibles errores máximos en la medición de 0, 03m
y 0 , 06 m respectivamente. Utilice diferenciales para estimar el
error porcentual que se comete al calcular el área total A de la
superficie del depósito.
Solución
r
h
r
Fig. 5.2.3
Para estimar el error porcentual del área total AT del depósito se
utiliza la aproximación
EP ( A) ≈
dA
⋅ 100%
A
De acuerdo con las condiciones del problema, se tiene
r = 4m
∆ r = dr = 0, 03
=
h 6m
∆ h ==
dh 0, 06
Luego,
A ( r ; h) =
π r 2 + 2πrh +
1
4πr 2 =
2πrh + 3πr 2
2
(
)
Capítulo 5. Derivadas de funciones de varias variables
337
A (4; 6=
) 96 π
dA (r ; h) =
∂A
∂A
. dr +
. dh = (2πh + 6πr ) dr + 2πr dh
∂r
∂h
dA (4;=
6) 1, 56 π
Por lo tanto, el error porcentual estimado del área total de la
superficie del depósito es
EP ( A) ≈
dA
1, 56π
⋅100% =
⋅100% = 1, 625 %
A
96π
Ejemplo 10
Al medir cada una de las dimensiones de un tanque subterráneo
que tiene la forma de un paralelepípedo rectangular se produ­
cen errores porcentuales máximos de 1% en el largo de la base,
0,5% en el ancho de la base y 1,5% en la altura del tanque. Uti­
lice diferenciales para estimar el error porcentual que se comete
al calcular la capacidad el tanque.
Solución
De acuerdo con la figura 5.2.4, la capacidad del tanque es
V = xyh
h
x
Fig. 5.2.4
y
y según las condiciones del problema se tiene
dx
1%
EP ( x) =⋅100 % =
x
dy
0, 5 %
EP ( y) = ⋅ 100 % =
y
dh
1, 5 %
EP (h) =⋅100 % =
h
Luego,
dV ≈
∂V
∂V
∂V
dx +
dy +
dh = yh dx + xhdy + xydh
∂x
∂y
∂h
Por lo tanto, el error porcentual estimado que se comete al
calcular la capacidad del tanque es
yh dx + xh dy + xy dh
dV
EP (V
=
⋅ 100 %
) ≈ ⋅ 100 %
V
xyh
=
dy
dx
dh
⋅100 % +
⋅ 100 % + ⋅100 %
x
y
h
=
1 % + 0, 5 % + 1, 5 % =
3%
338
Cálculo II
Ejercicios y problemas resueltos 5.2
1.
Dada la función f definida por
f ( x;=
y)
x2 + y 2
a) Calcule el incremento total de f en el punto A (3; 4) , si x
varía de 3 a 3, 2 e y varía de 4 a 3, 9 .
b) Calcule el diferencial total de f en el punto A (3; 4) cuando
dx = 0 , 2 y dy = − 0 ,1.
c) Utilice diferenciales para hallar un valor aproximado de
f (3, 2; 3, 9) .
Solución
a) Si x varía de 3 a 3, 2 e y varía de 4 a 3, 9 , entonces el in­
cremento total de f en el punto A (3; 4) es
∆ f (3; =
4) f (3, 2; 3, 9) − f (3; =
4)
(3, 2)2 + (3, 9)2 −
32 + 42
≅ 5, 0448 − 5 =
0 , 0448
b) Al aplicar las fórmulas y reglas de derivación, el diferencial
total de la función f es
=
df ( x; y) f x ( x; y) dx + f y ( x; y) dy
y
x
=
dx +
dy
x 2 + y 2
x 2 + y 2
Luego, al considerar las condiciones del problema
=
x 3,
∆ x = dx = 0,2
y =4,
∆ y =dy =− 0,1
se tiene
3
4
=
df (3; 4)
0, 2) +
=
(
(− 0,1) 0, 04
32 + 42
32 + 42
c) Como el punto (3, 2; 3, 9) es cercano al punto (3; 4) , para
determinar un valor aproximado de f (3, 2; 3, 9) se utiliza la
observación 1. Así, se tiene
f (3, 2; 3, 9) ≅ f (3; 4) + df (3; 4) =
5 + 0, 04 =
5, 04
Por lo tanto, un valor aproximado de f (3, 2; 4,1) es 5, 04.
Capítulo 5. Derivadas de funciones de varias variables
339
2.
Sea f la función definida por
=
w f ( x; =
y; z) arctan (3x + 2 y − 4z)
a) Calcule el incremento total de w en el punto A(1; 3; 2) si x
varía de 1 a 1, 01 , y varía de 3 a 3, 02 y z varía de 2 a 2 , 03.
b) Calcule el diferencial total de f en el punto A (1; 3; 2) con
dx = 0 , 01, dy = 0 , 02 y dz = 0 , 03.
c) Use diferenciales para hallar un valor aproximado de
f (1, 01; 3, 02; 2, 03) .
Solución
a) El incremento total de f en el punto A (1; 3; 2) cuando x va­
ría de 1 a 1, 01 , y varía de 3 a 3, 02 y z varía de 2 a 2, 03 es
∆ f=
(1; 3; 2) f (1, 01; 3, 02; 2, 03) − f (1; 3; 2)
=arctan (0 , 95) − arctan (1) =0 , 75976 − 0 , 78540
= − 0 , 02564
b) Al aplicar las fórmulas y reglas de derivación, se tiene
f x ( x=
; y ; z)
f y ( x=
; y ; z)
3
1 + (3x + 2 y − 4z)
⇒ f x (1=
; 3; 2)
2
⇒ f y (1=
; 3; 2) 1
2
1 + (3x + 2 y − 4 z)
3
2
2
−4
f z ( x; y ; z) =
⇒ f z (1; 3; 2) =
−2
2
1 + (3x + 2 y − 4z)
Al considerar las condiciones del problema
x = 1,
∆ x= dx = 0 , 01
y = 3,
∆ y = dy = 0 , 02
z = 2,
∆ z = dz = 0 , 03
se tiene
df (1; 3; 2) = f x (1; 3; 2) dx + f y (1; 3; 2) dy + f z (1; 3; 2) dz
3
= (0 , 01) + (1)(0, 02) + (−2)(0, 03) =− 0 , 025
2
c) Como el punto (1, 01; 3, 02; 2, 03) es cercano al punto (1; 3; 2) ,
para determinar un valor aproximado de f (1, 01; 3, 02; 2, 03)
se utiliza la observación 1. Así, se tiene
f (1, 01; 3, 02; 2, 03) =
f (1 + 0, 01; 3 + 0, 02; 2 + 0, 03)
≈ f (1; 3; 2) + df (1; 3; 2) =
0, 7604
Por lo tanto, un valor aproximado de f (1,1; 3, 2; 2 , 3)
es 0, 7604.
340
Cálculo II
3.
Determine el conjunto donde es diferenciable cada una de las
siguientes funciones
(
; y) ln y − x 2
a) f ( x=
)
y
b) g ( x; y) = arctan
x
Solución
a) El dominio de la función f es
D=
{ ( x; y ) ∈ 2 / y > x 2 }
Como las funciones
−2x
1
f ( x; y ) =
ln y − x 2 , f x ( x; y) =
, f y ( x; y ) =
2
y−x
y − x2
(
)
son continuas en la región D, entonces f es diferenciable en D.
El dominio de la función g es
{
D1 = ( x; y) ∈ 2 / x ≠ 0
}
Como las funciones
−y
x
y
=
=
g ( x; y) arctan
, g y ( x; y )
x , g x ( x; y) =
2
2
2
x +y
x + y2
son continuas en la región D1 , entonces g es diferenciable en D1.
4.
Un agricultor es propietario de un terreno que tiene la forma
de un trapecio rectangular tal como se muestra en la figura
5.2.5. Al medir las bases y la altura se obtiene 500 m, 300 m. y
400 m respectivamente con un error máximo de 0,05 m en cada
medición. Use diferenciales para estimar el error que se comete
al calcular el área del terreno.
Solución
400 m
500 m
De acuerdo con la figura 5.2.5 el área A del terreno es
Figura 5.2.5
1
( B + b) h
2
=
A
300 m
Al aplicar las fórmulas y reglas de derivación, el diferencial
total del área es
dA =
∂A
∂A
∂A
dB +
db +
dh
∂B
∂b
∂h
h
h
B + b
= dB + db +
dh
2
2
2
Capítulo 5. Derivadas de funciones de varias variables
341
Al considerar las condiciones del problema
=
B 500
=
,
dB 0, 05
=
b 300
=
,
db 0 , 05
=
h 400
=
,
dh 0 , 05
se tiene
dA (500; 300; 400) = (200)(0 , 05) + (200)(0 , 05) + (400)(0 , 05)
= 40
Por lo tanto, el error máximo que se comete al calcular el
área del terreno es de aproximadamente 40 m2.
5.
y
h
En una carrera por los desiertos del Perú un auto viaja asistido
por un helicóptero como se muestra en la figura 5.2.6. Al medir
la altura de vuelo del helicóptero y la distancia que lo separa
del auto se obtuvieron 100 m y 260 m respectivamente, con un
error en cada caso de 3 cm. Use diferenciales para estimar el
error que se comete al calcular z.
260 m
100 m
z
z
Fig. 5.2.6
Solución
Sean h la altura de vuelo del helicóptero e y la distancia de este
al auto (en metros). Según la figura 5.2.6, la distancia z es
=
z f (h;=
y)
y 2 − h2
Al aplicar las fórmulas y reglas de derivación, el diferencial
total de f es
df (h; y) =
∂f
∂f
. dh + . dy =
∂h
∂y
−h
y
. dh +
. dy
y 2 − h 2
y 2 − h 2
Al considerar las condiciones del problema
=
h 100
=
m
dh 0, 03 m
=
y 260
=
m
dy 0, 03 m
342
Cálculo II
se tiene
=
df (100; 260)
. (0, 03) +
2
− (100)
−100
(260)2
. (0, 03)
2
− (100)
260
(260)2
= 0, 02
Por lo tanto, el error máximo que se comete al calcular z es
de aproximadamente 2 cm.
6.
Se desea determinar la capacidad de un recipiente sin tapa que
tiene la forma de un tronco de cono circular con base una se­
miesfera, tal como se muestra en la figura 5.2.7.
.
R
Al medir los radios de las bases y la altura del tronco de
cono se obtuvo
h
r = 7 cm , R =10 cm , h =20 cm
.r
con un error máximo de 0 , 01cm en cada medición. Use di­
ferenciales para estimar el error que se comete al calcular la
capacidad del recipiente.
Fig. 5.2.7
Solución
Nota
Dado que el volumen de la semiesfera de radio r es
Volumen del tronco de cono circu­
lar recto:
4πr 3
2πr 3
3
=
Vse =
,
2
3
VTC
=
πh 2
r + rR + R2
3
(
)
la capacidad total del recipiente es
V = VTC + Vse =
πh 2
2πr 3
r + rR + R2 +
3
3
(
)
Al aplicar las fórmulas y reglas de derivación, el diferencial
total de la capacidad del recipiente es
∂V
∂V
∂V
dV = dr +
dR +
. dh
∂r
∂R
∂h
πh
πh
=
dV (2r + R) + 2πr 2 dr +
(r + 2R) dR +
3
3
+
π 2
r + rR + R2 dh
3
(
)
De las condiciones del problema
=
r 7=
cm , dr 0, 01cm
=
R 10
=
cm , dR 0 , 01cm
=
h 20
=
cm ,
dh 0 , 01cm
Capítulo 5. Derivadas de funciones de varias variables
343
se tiene
dV (7; 10; 20) =
[258 π ] (0, 01) + [180 π] (0, 01) + [73 π] (0, 01)
= 5,11 π
Por lo tanto, el error máximo que se comete al calcular la
capacidad del recipiente es de aproximadamente 5,11 π cm3 .
7.
En una refinería un depósito tiene la forma de un cilindro cir­
cular recto cerrado. Al medir la altura y el radio de la base se
cometen errores de a lo más 1 % y 2% respectivamente. Deter­
mine el error porcentual que se comete al calcular la capacidad
del depósito.
Solución
De acuerdo con la figura 5.2.8, la capacidad V del depósito es
r
V = π r2 h
Al aplicar las fórmulas y reglas de derivación, el diferencial
total de volumen es
h
dV (r ; h) =
∂V
∂V
dr +
dh = 2πrh dr + πr 2 dh
∂r
∂h
Según los datos del problema se tiene
dr
dh
EP (r ) = ⋅ 100 = 2 %, EP (h) = ⋅ 100 = 1 %
r
h
Fig. 5.2.8
Así, el error porcentual de V es
dV
EP V (r ; h) ≈
⋅ 100%
V
πr 2
2πrh
= 2 ⋅ dr ⋅ 100% + 2 ⋅ dh ⋅ 100%
πr h
πr h
dr
dh
EP V (r ; h) ≈ 2 ⋅ 100 % + ⋅100 %
r
h
= 2 (2 %) + 1 %
= 5%
Por lo tanto, al calcular la capacidad del depósito se comete
un error de 5 % aproximadamente.
8.
344
Cálculo II
La medida del cateto opuesto a un ángulo agudo de un trián­
gulo rectángulo es de 8 m, mientras que el otro cateto mide 9 m.
Si la medida del cateto opuesto disminuye en 2 cm y la medida
del otro cateto se incrementa en 1 cm, use diferenciales para
estimar la variación de la medida de dicho ángulo agudo.
Solución
Sean α la medida del ángulo agudo, y la longitud del cateto
opuesto y x la longitud del cateto adyacente.
y
α
x
Fig. 5.2.9
De la figura 5.2.9 se tiene
tan α=
y
y
⇒ α= f ( x; y)= arctan
x
x
El diferencial total de la función f es
=
dα df=
( x; y )
∂f ( x; y)
∂x
⋅ dx +
∂f ( x; y)
∂y
⋅ dy
−y
x
= 2
⋅
+
dx
2
⋅ dy
2
x + y2
x + y
Según los datos del problema
=
x 9=
m , dx 0 , 01 m
y = 8 m , dy = −0, 02 m
resulta
9
−8
df (9; 8)
=
(0, 01) + (− 0, 02) ≈ − 0, 0018
145
145
Por lo tanto, la medida del ángulo agudo disminuye aproxi­
madamente en 0 , 0018 rad.
9.
Una compañía importadora desea introducir en el mercado na­
cional impresoras 3D de los tipos A y B. Se estima que si cada
impresora del tipo A se vende en x miles de dólares y cada impresora del tipo B se vende en y miles de dólares, se venderán
40 − 8x + 5y impresoras del tipo A y 50 + 9x − 4 y impreso­
ras del tipo B . Si el costo de cada impresora del tipo A es de
$10000 y el de cada impresora del tipo B es de $ 30000 :
a) Determine la función utilidad de la compañía importadora
en términos de x e y.
b) Calcule la utilidad de la importadora si cada impresora del
tipo A se vende en $ 20 000 y cada impresora del tipo B en
$ 40 000.
Capítulo 5. Derivadas de funciones de varias variables
345
c) Con los datos de b), use diferenciales para estimar la va­
riación de la utilidad si la importadora decide aumentar en
$ 100 el precio de venta de cada una de las impresoras de los
tipos A y B.
Solución
a) De acuerdo con los datos del problema se construye la si­
guiente tabla.
Precio
Costo
Utilidad Cantidad de
Tipo de
de venta unitario
unitaria impresoras
impresora
unitario (en miles) (en miles)
vendidas
Utilidad por cada
tipo de impresora
(en miles)
A
x
10
x − 10
40 − 8x + 5y
(x − 10)(40 − 8x + 5y)
B
y
30
y − 30
50 + 9x − 4 y
( y − 30)(50 + 9x − 4 y)
Luego, la utilidad total de la compañía importadora es
U = ( x − 10)(40 − 8x + 5y) + ( y − 30)(50 + 9x − 4 y)
=
− 8x 2 − 4 y 2 + 14xy − 150x + 120 y − 1900
Para
=
x 20
=
, y 40 , se tiene
U (20; 40) = 1500
Por consiguiente, cuando cada impresora del tipo A
se vende a $ 20 00 y cada impresora del tipo B se vende a
$ 40 000 la utilidad de la compañía importadora es de
$ 1 500 000.
c) Al aplicar las reglas y fórmulas de derivación, se tiene
dU ( x; y) =
(−16x + 14 y − 150) dx + (14x − 8y + 120) dy
Al considerar las condiciones del problema
=
x 20
=
, dx 0 ,1
=
y 40
=
, dy 0,1
se tiene
dU (20; 40) =
[−16 (20) + 14 (40) − 150] (0,1) + [14 (20) − 8 (40) + 120] (0,1)
= 17
Por lo tanto, la utilidad de la compañía importadora au­
menta en $ 17 000 aproximadamente cuando se aumenta en
$ 100 el precio de venta de cada impresora.
346
Cálculo II
10. Un proveedor de una fábrica de bebidas gaseosas produce
envases de aluminio con forma de un cilindro circular recto
cuya característica de diseño radica que tiene un radio interior
de 4 cm, una altura exterior de 16 cm y un espesor de 0,2 cm.
¿Qué cantidad de aluminio se emplea aproximadamente en la
fabricación de cada envase?
Solución
Sean V el volumen interior del envase, r el radio interior de la
base y h su altura exterior. Entonces
V = π r2h
V
(volumen
interno)
0,2 cm
h
r
Fig. 5.2.10
También, de acuerdo con el diseño de cada envase, se tiene
r =4 , ∆ r =dr =0 , 2 , h =16 , ∆ h =dh =− 0 , 4
Para determinar aproximadamente la cantidad de aluminio
∆V que se necesita para fabricar cada envase se requiere el
diferencial total del volumen.
Así, se tiene
dV =
∂V
∂V
dr +
dh = 2π rh dr + πr 2 dh
∂r
∂h
Al reemplazar en la diferencial total r = 4 , dr = 0, 2, h = 16
y dh = − 0, 4 se obtiene
2
∆V (4;16) ≈ dV (4;16) = 2π (4)(16)(0, 2) + π (4) (− 0, 4)
= 19 , 2π ≈ 60, 32
Por consiguiente, la cantidad aproximada de aluminio que
se necesita para fabricar cada envase es de 60,32 cm3.
11. En una fábrica textil, la producción diaria de tela en metros
esta dada por la función
4
1
Q ( x; z) = 600 x 5 z 5
donde x representa la inversión de capital y z representa horas
trabajador diarias. Calcule la variación porcentual de la pro­
Capítulo 5. Derivadas de funciones de varias variables
347
ducción diaria de la fábrica, si la inversión de capital se incre­
menta en un 2 % y las horas trabajador diarias en un 7 %.
Solución
De acuerdo con los datos del problema, se tiene
EP ( x) ≈
dx
dz
. 100
= 2 % y EP ( z) ≈
. 100
= 7%
x
z
El diferencial total de la variable producción es
dQ (=
x; z)
∂Q
∂Q
dx +
dz
∂x
∂z
= 480 x
−
1 1
5 z5
4
dx + 120 x 5 z
−
4
5
dz
Luego, el error porcentual de Q es
EP ( x; z) ≈
dQ
⋅100
Q
4
4
1
1
−
−
120x 5 ⋅ z 5 dz
480 x 5 ⋅ z 5 dx
=
⋅ 100
⋅ 100 +
4
1
4
1
5
5
600 x 5 ⋅ z 5
600 x ⋅ z
=
4 dx
1 dz
⋅ 100 % + ⋅ 100 %
5 x
5 z
Al reemplazar los errores porcentuales de x y z, se obtiene
EP [ Q ( x; z) ] ≈
4
1
3%
(2) + (7) =
5
5
Por lo tanto, cuando la inversión de capital se incrementa en
un 2 % y la cantidad de horas trabajador en un 7 %, la produc­
ción diaria de la fábrica textil aumenta en un 3 %.
348
Cálculo II
el error que se comete al calcular el área
del terreno.
Ejercicios y problemas propuestos 5.2
1.
Dada la función f definida por
f ( x; y) = 3 4x 2 − 10xy + 12 y 2
a) Calcule el incremento total de f en el
punto A (2; 1) , si x varía de 2 a 2,001 e y
varía de 1 a 1,002.
400 m
b) Calcule el diferencial total de f en
el punto A (2; 1) , cuando dx = 0,001 y
dy = 0,002.
c) Use diferenciales para hallar un valor
aproximado de f (2,001; 1,002).
2.
Sea f la función definida por
(
w
= f ( x; y; z=
) ln x2 + xz − y 2
300 m
Fig. 5.2.11
5.
)
a) Calcule el incremento total de w en el
punto A (2; − 2; 0, 5) , si x varía de 2 a
2 , 01, y varía de –2 a −1, 98 y z varía de
0 , 5 a 0 , 48.
b) Calcule el diferencial total de f en el pun­
to A (2; − 2; 0, 5) con dx = 0 , 01, dy = 0, 02
y dz = − 0, 02.
c)Use diferenciales para hallar un valor
aproximado de f (2 , 01; −1, 98; 0, 48) .
3.
200 m
Determine y grafique el conjunto donde
es diferenciable cada una de las siguientes
funciones
y)
a) f ( x;=
z
x2 − y 2
Una compañía inmobiliaria desea adquirir
un terreno que tiene la forma de un rectán­
gulo coronado por un semicírculo como
se muestra en la figura 5.2.11. Al medir el
ancho y el largo de la parte rectangular se
obtienen 300 m y 400 m respectivamen­
te, con un error máximo de 0,02 m en cada
medición. Use diferenciales para estimar
300 m
120 m
b) g ( x=
; y) ln ( y − senx)
4.
Después del naufragio de un yate, un heli­
cóptero sale en busca de sobrevivientes. Al
cabo de cierto tiempo se localizan dos perso­
nas y un dispositivo determina que el heli­
cóptero se encuentra a 200 m de una de ellas
y a 300 m de la otra, volando a una altura
de 120 m. Si todas las mediciones tienen a lo
más un error de 1 cm, use diferenciales para
estimar el error que se comete al calcular la
distancia z entre las personas.
Fig. 5.2.12
6.
Se desea determinar la capacidad de un re­
cipiente que tiene la forma de un cilindro
circular recto coronado con parte de un se­
micono circular como se muestra en la figura
5.2.13. Al medir el radio de la base, la altura
del cilindro y la altura del semicono se obtu­
vieron r = 5 m, h = 10 m y H = 2 m respecti­
Capítulo 5. Derivadas de funciones de varias variables
349
vamente. Si en cada medición el error que se
comete es a lo más de 1 cm, use diferenciales
para estimar el error que se comete al calcu­
lar la capacidad del recipiente.
de dos productos. Utilice diferenciales para
estimar la variación de la utilidad U cuando
x cambia de 100 a 99 e y cambia de 300 a 301.
10. En una refinería un depósito tiene la forma
de un cilindro circular recto cerrado. Al me­
dir la altura y el radio de la base se sabe que
se cometen errores de a lo más 1 % y 2 %
respectivamente. Determine el error porcen­
tual que se comete al calcular la capacidad
del depósito.
2m
10 m
11. Se han fabricado 1000 tapones de monoblock
5m
Fig. 5.2.13
7.
8.
9.
350
Las medidas de los catetos de un triángulo
rectángulo son 5 m y 12 m respectivamen­
te, con un error en la medición de a lo más
0,2 m en cada cateto. Utilice diferenciales
para estimar el error que se comete en el cál­
culo de la longitud de la hipotenusa.
Se tiene un cilindro circular recto metáli­
co cuyas dimensiones son 2 m de altura y
1 m de radio en la base. Se desea pintarlo
exteriormente con una capa de pintura de
0,001 m de espesor, tanto en la parte lateral
como en las bases. Utilice diferenciales para
estimar la cantidad de pintura que se nece­
sita para pintar el cilindro.
1
x4
3
y4 ,
Sea la función utilidad U ( x; y) =
donde x e y son las cantidades consumidas
Cálculo II
para cierta marca de automóviles. Estos tapo­
nes son sólidos fabricados en cobre y tienen
la forma de un cilindro circular recto. Las
medidas que le dieron al fabricante fueron
0,5 cm de altura y 1,5 cm de radio en la base.
Al probarlos se encuentra que los tapones
han quedado un poco grandes, así que se ha
contratado a un tornero para que los desgas­
te. Según las nuevas medidas, la altura debe
ser de 0,49 cm y el radio de la base de 1,48 cm.
a) Calcule usando diferenciales la cantidad
aproximada de cobre que se retira de los
1000 tapones.
b) Si el tornero cobra S/ 2 por cada cm3 de
cobre retirado, calcule la cantidad apro­
ximada de dinero que obtendrá con el
desgaste de los 1000 tapones.
5.3Regla de la cadena
En la sección 5.1, para una función de varias variables cuya regla
de correspondencia
es z f ( x1 ; x2 ; …; xn ) , la razón instantánea de
=
cambio de z con respecto a una de sus variables independientes
∂z
xi se determinó mediante la derivada parcial
. Sin embargo,
∂xi
cuando las variables independientes dependen a su vez de otras va­
riables independientes, la pregunta que surge es: ¿cómo determinar
la razón de cambio de z con respecto a estas nuevas variables?
Para responder esta pregunta, la regla de la cadena establecida
para la composición de funciones reales de una variable se extiende
a funciones de varias variables. Así se tiene el siguiente teorema.
z
Teorema 1. Regla de la cadena
Si F es una función diferenciable en
y f y g son funciones derivables en
(x0 ; y0 ) ∈ Dom (F ) ⊂ 2
t0 ∈ I ⊂ � tales que
=
z F ( x;=
y) , x f=
=
x0 f=
(t) , y g (t) , donde,
(t0 ) e y0 g (t0 ) , enton­
=
z G=
ces la función compuesta dada por
(t) F ( f (t) ; g (t)) , es deri­
x
y
t
t
vable en t0 y la derivada de z con respecto a t, evaluada en t0 está
dada por
=
G ’ (t0 )
dz
dt
t = t0
= Fx ( x0 ; y0 ) ⋅ f ’ (t0 ) + Fy ( x0 ; y0 ) ⋅ g ’ (t0 )
Demostración
Como F es diferenciable en ( x0 ; y0 ) existen las derivadas parciales
de primer orden Fx ( x0 ; y0 ) , Fy ( x0 ; y0 ) y se tiene
∆ F (=
x0 ; y0 ) Fx ( x0 ; y0 ) ∆ x + Fy ( x0 ; y0 ) ∆ y + E1 (∆ x; ∆ y) ∆ x + E2 (∆ x; ∆ y) ∆ y
donde E1 (∆ x; ∆ y) y E2 (∆ x; ∆ y) son funciones tales que
lim
=
E1 (∆ x; ∆ y) 0 ,
(∆x ; ∆y) → (0; 0)
lim
=
E2 (∆ x; ∆ y) 0
(∆x ; ∆y) → (0; 0)
Además, los incrementos de las funciones f y g en t0 son
∆ x= f (t0 + h) − f (t0 )= f (t0 + h) − x0
∆ y= g (t0 + h) − g (t0 )= g (t0 + h) − y0
Así, el incremento de la función compuesta G en t0 es
∆ G (t0 =
) G (t0 + h) − G (t0 )
= F ( f (t0 + h) ; g (t0 + h)) − F ( f (t0 ) ; g (t0 ))
Capítulo 5. Derivadas de funciones de varias variables
351
∆G (t=
0 ) F ( f (t0 + h) ; g (t0 + h)) − F ( x0 ; y0 )
= F ( x0 + ∆ x; y0 + ∆ y) − F ( x0 ; y0 ) = ∆ F ( x0 ; y0 )
= Fx ( x0 ; y0 ) [ f (t0 + h) − f (t0 ) ] + Fy ( x0 ; y0 ) [ g (t0 + h) − g (t0 ) ] +
+ E1 (∆ x; ∆y) [ f (t0 + h) − f (t0 ) ] + E2 (∆ x; ∆ y) [g (t0 + h) − g (t0 )]
Al dividir entre h ambos miembros de la igualdad, resulta
∆G (t0 )
f (t + h) − f (t0 )
g (t + h) − g (t0 )
=
Fx ( x0 ; y0 ) 0
+ Fy ( x0 ; y0 ) 0
h
h
h
f (t + h) − f (t0 )
g (t + h) − g (t0 )
+ E1 (∆ x; ∆ y) 0
+ E2 (∆ x; ∆ y) 0
h
h
Luego, al tomar límite cuando h tiende a 0, se obtiene
dz
= Fx ( x0 ; y0 ) f ’ (t0 ) + Fy ( x0 ; y0 ) g ’ (t0 )
dt t =t0
=
G
’ (t0 )
Observación 1
a) La conclusión del teorema 1 para cualquier t ∈ I ⊂ Dom (G)
también se escribe como
dz ∂z dx ∂z dy
= ⋅ + ⋅
dt ∂x dt ∂y dt
b) En general, si F es una función diferenciable de n variables en
el punto ( x1 ; …; xn ) ∈ Dom ( F ) ⊂ n tal que
=
z F ( x1 ; …; xn ) ,
y cada variable independiente xi es una función derivable de
la variable t, esto es xi = fi (t )=
, i 1, 2 , … , n; entonces
dz ∂z dx1
∂z dxn
=
⋅
+…+
⋅
dt ∂x1 dt
∂xn dt
c) A la última igualdad se le conoce como la derivada total de
z con respecto a t, la cual permite resolver problemas sobre
rapidez de variación de z con respecto a la variable t que re­
presenta el tiempo.
Ejemplo 1
Si z = F ( x; y) = x 2 + xy + y 2 , x =t 2 + t , y =3t 2 ,
Calcule
dz
, cuando t = 1.
dt
Solución
Como z depende de x e y y, a su vez, estas variables dependen de
t, la regla de la cadena correspondiente es
352
Cálculo II
dz ∂z dx ∂z dy
= ⋅
+ ⋅
dt ∂x dt ∂y dt
… (* )
donde las derivadas parciales de z y las derivadas ordinarias de
x e y con respecto a t son:
∂z
=
2x + y ,
∂x
∂z
=
x + 2y
∂y
dx
=
2t + 1,
dt
dy
=
6t
dt
Así, al reemplazar estas derivadas en (*), resulta
dz
= (2x + y)(2t + 1) + ( x + 2 y)(6t )
dt
Además, al evaluar x =
t2 + t, y =
3t 2 en t = 1, se obtiene
=
x 2=
, y 3.
Por lo tanto,
dz
dt
= [2 (2) + 3] (3) + [2 + 2 (3)] (6=
) 69
t =1
Ejemplo 2
La presión, volumen y temperatura de un mol de gas ideal están
relacionados por la ecuación PV = 8, 31T , donde P se mide en
kilopascales (kP), V en litros (L) y T en grados Kelvin (K ). Halle
la razón de cambio de la presión cuando el volumen es 20L y
disminuye a razón de 0, 2 L / min , mientras que la temperatura
es 64°K y aumenta a razón de 4°K / min.
Solución
A partir de la relación dada entre la presión, la temperatura y el
volumen, se tiene
T
P = 8, 31
V
Según la regla de la cadena, la razón de cambio de la presión
con respecto al tiempo es
dP ∂P dT ∂P dV
=
⋅
+
⋅
dt ∂T dt ∂V dt
1 dT
T dV
=
8, 31 .
− 8, 31 2 .
… (1)
V dt
V dt
De acuerdo con las condiciones del problema, se tiene
dV
dT
V=
20,
=
− 0, 2, T =
64,
=
4
dt
dt
Capítulo 5. Derivadas de funciones de varias variables
353
Al reemplazar estos valores en la igualdad (1), resulta
dP
1
64
0 , 2) 3, 324
= 8, 31 (4) −8, 31 2 (−=
20
dt
8
Por lo tanto, cuando el volumen es de 20 litros y la tempera­
tura es de 64 grados Kelvin, la presión aumenta a una razón de
3, 324 kP / min.
Una generalización de la regla de la cadena es la propiedad
descrita a continuación en el teorema 2.
Teorema 2. Regla de la cadena. Caso general
Si F es una función diferenciable en ( x; y) ∈ Dom ( F ) ⊂ 2 y f y g son
funciones diferenciables en (r ; s) ∈ [Dom ( f ) Dom ( g)] tales que
z = F ( x; y) , x = f (r ; s) e y = g (r ; s) , entonces las derivadas parcia­
les de primer orden de la función compuesta dada por
z = F ( f (r ; s) ; g (r ; s))
con respecto a r y a s son
∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅ ,
∂r ∂x ∂r ∂y ∂r
∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅
∂s ∂x ∂s ∂y ∂s
Observación 2
La dependencia de z con respecto a las variables intermedias x e y y
con respecto a las variables independientes r y s se representa en el
siguiente diagrama.
∂z ∂z ∂x ∂z ∂y
∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅ ,r
= ⋅ + ⋅
∂r ∂x ∂r ∂y ∂r
∂s ∂x ∂s ∂y ∂s
∂z ∂z ∂x∂z =∂z∂z∂⋅ y∂x + ∂z ⋅ ∂y ,∂z ∂z ∂x∂z =∂z∂z∂⋅ y∂x + ∂z ⋅ ∂y∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅ ,
= ⋅ + ⋅
x
= ⋅ + ⋅ ,
∂r ∂x ∂r∂r ∂y∂x∂r∂r ∂y ∂r ∂s ∂x ∂s∂s ∂y∂x ∂s∂s ∂y ∂s∂r ∂x ∂r ∂y ∂r
s
z
∂z ∂z ∂x ∂z ∂y
∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅ ,
= ⋅ + ⋅
r ∂s ∂x ∂s ∂y ∂s
∂r ∂x ∂r ∂y ∂r
∂z ∂z ∂x ∂z ∂y
∂z ∂z ∂x ∂z ∂y
∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅ ∂, z ∂z ∂x ∂=z ∂⋅y + ⋅ ∂z y∂z∂z∂x= ∂z∂⋅z∂x∂y+ ∂z ⋅ ∂y ,
= ⋅ + ⋅
∂r ∂x ∂r ∂y ∂r
= ⋅ ∂+s ∂⋅x ∂,s ∂y ∂s
= ∂⋅r +
∂x ∂⋅r ∂y ∂r
∂s ∂x ∂s ∂y ∂s
∂r ∂x ∂r ∂y ∂r
∂s ∂x ∂s ∂y ∂s
s
Ejemplo 3
x sen (r ) + sen (s) ,
Si z = x 2 + y 2 + xy , =
=
y cos (r ) − cos (s) , calcule
π
∂z ∂z
=
r =
y s 0.
y
cuando
2
∂r
∂s
Solución
De acuerdo al teorema 2, la derivada parcial de z con respecto a
r está dada por
354
Cálculo II
∂z ∂z ∂x
= ⋅
∂s ∂x ∂s
∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅
∂r ∂x ∂r ∂y ∂r
=(2 x + y) cos (r ) − (2 y + x) sen (r )…(* )
∂z ∂z ∂x ∂z ∂y
∂z ∂z
= ⋅ + ⋅ r,
=
∂r ∂x ∂r ∂y ∂r
∂s ∂x
∂z ∂z ∂x ∂∂zz= ∂∂yz ⋅ ∂x + ∂z ⋅ ∂∂yz, ∂z ∂x ∂∂zz= ∂∂yz ⋅ ∂x + ∂z ⋅ ∂y
x
= ⋅ + ⋅ ,
= ⋅ + ⋅
∂r ∂x ∂r ∂∂ry ∂rx ∂r ∂y ∂∂r s ∂x ∂s ∂∂sy ∂sx ∂s ∂y ∂s
s
∂z
π
π
z
∂z ∂z ∂x ∂z ∂y
∂z ∂z ∂x ∂
2 (1) + (−1) ] cos − [ 2 (−1) + 1 ] sen =
1
=
[
π
= ⋅ + ⋅ ,
= ⋅ +
r
∂r r = 2
2
2
∂r ∂x ∂r ∂y ∂r
∂s ∂x ∂s ∂
∂
y
∂
y
∂
z
∂
z
∂
x
∂
z
∂
z
∂
z
∂
x
∂
z
s=0
= ⋅ + ⋅ ∂z , ∂z ∂x ∂z =∂y ⋅ + ⋅ ∂z ∂yz ∂x ∂z ∂y
∂r ∂x ∂r ∂y ∂r = ⋅ + ∂s ⋅ ∂x, ∂s ∂y ∂s = ⋅ + ⋅
∂r ∂x ∂r ∂y ∂r
∂s ∂x ∂s ∂y ∂s
De manera similar,
s
π
=
y s 0 , se obtiene x = 1 e y = −1.
2
Al reemplazar estos valores en (∗) , se tiene
=
r
Para
∂z ∂z ∂x ∂z ∂y
= ⋅ + ⋅ = (2 x + y) cos (s) + (2 y + x) sen (s)
∂s ∂x ∂s ∂y ∂s
y al reemplazar r =
∂z
=
π
∂s r = 2
π
, s = 0 , x = 1 e y = −1, resulta
2
0)
[2 (1) + (−1)] cos (0) + [2 (−1) + 1] sen (=
1
s=0
Ejercicios y problemas resueltos 5.3
1.
Sea w = f ( x; y ; z) = 3x 2 − 2 y + 4z3 , donde=
x ln (t + 1) ,
y=
2u + v , z =−
u 2v , u =
cos (πt ) , v =
sen (πt ) . Utilice la regla de
la cadena para calcular
dw
dt t =0
Solución
De acuerdo con las condiciones del problema, el diagrama de
dependencias de las variables es
t
x
z
y
z
u
t
v
t
u
t
v
t
Fig. 5.3.1
Capítulo 5. Derivadas de funciones de varias variables
355
Según la regla de la cadena, la derivada de w con respecto
a t es
dw ∂w dx ∂w ∂y du ∂w ∂y dv ∂w ∂z du
=
⋅
+
⋅ ⋅
+
⋅ ⋅
+
⋅ ⋅
dt ∂x dt ∂y ∂u dt ∂y ∂v dt ∂z ∂u dt
+
∂w ∂z dv
⋅ ⋅
∂z ∂v dt
dw
=
dt
1
− 2 (2) (−πsen (πt )) − 2 (1) (π cos (πt ))
t + 1
(6x)
(
)
(
)
+ 12z 2 (1) (−πsen (πt )) + 12 z 2 (−2) (π cos (πt ))
Al reemplazar t = 0 en las expresiones de x, z y en la deri­
vada total, se obtiene
dw
dt
2.
=
−26π
t =0
Si el radio r de un sector circular se incrementa a razón
de 0, 4 cm /min y su ángulo central α decrece a razón de
0 , 02 rad /min, ¿cuál es la razón con la que cambia el área del
sector circular cuando el radio mide 16 cm y su ángulo central
mide 2 radianes?
Solución
En la figura 5.3.1 se muestra un sector circular de radio r y án­
gulo central α. Así, el área A del sector circular está dada por
A=
αr 2
2
De acuerdo con las condiciones del problema, se tiene
dr
dα
= 0, 4 cm /min,
= −0, 02 rad /min
dt
dt
r
Según la regla de la cadena, la razón de cambio del área con
respecto al tiempo es
α
Fig. 5.3.1
dA ∂A dr ∂A dα
=
⋅ +
⋅
dt ∂r dt ∂α dt
=
(αr )(0, 4) +
r2
(− 0, 02)
2
Para α =2 rad y r = 16 cm se obtiene
dA
162
= (2)(16)(0, 4) +
0, 02) 10, 24
(− =
dt α=2
2
r =16
356
Cálculo II
Luego, cuando el radio mide 16 cm y el ángulo central
mide 2 rad, el área del sector circular aumenta a razón de
10, 24 cm 2 / min .
3.
La función de ingreso de un comerciante que vende dos pro­
ductos es
I ( x=
; y)
x 2 y + 3xy , soles por semana,
donde x representa el número de unidades vendidas semanal­
mente del primer producto e y las del segundo. Si tanto x como
y dependen del número t de semanas que los productos están
en el mercado mediante las ecuaciones:
=
x t 2=
, y 4t ,
calcule la tasa de variación del ingreso semanal cuando los
productos están 4 semanas en el mercado.
Solución
De acuerdo con las condiciones del problema, el diagrama de
dependencias de las variables es
I
x
t
y
t
Al aplicar la regla de la cadena se tiene
dy
dI
dx
= I x ( x; y ) + I y ( x; y )
dt
dt
dt
xy
x2
=
+ 3y (2t ) +
+ 3x
x 2 y
2 x 2 y
(4)
Al sustituir t = 4 en las expresiones de x e y y en la derivada
total, resulta
dI
dt
t =4
=[4 + 48] (8) + [2 + 48] (4) = 616
Por lo tanto, cuando los productos están 4 semanas en el
mercado, el ingreso del comerciante aumenta a una tasa de
S/ 616 por semana.
4.
En el valle de Cañete un agricultor siembra dos productos: en
una mitad de su terreno siembra maíz y en la otra, zapallo. La
utilidad U (en soles) que percibe por la venta de sus productos
depende de la cantidad cosechada de x de kg de maíz de y de
kg de zapallo y de los gastos que ha efectuado en semillas y
fertilizantes, entre otros, de acuerdo con la siguiente ecuación
Capítulo 5. Derivadas de funciones de varias variables
357
U=
x2
+ 2 y − 5000
100
Por otro lado, las cantidades x e y dependen del caudal pro­
medio u del canal de regadío m 3/ s y de la temperatura pro­
medio v durante el tiempo de cultivo (en grados centígrados),
según las siguientes ecuaciones:
(
x =−
20u2
1000
,
v
y=
5u2 +
)
2000
v
Use la regla de la cadena para calcular la razón de cambio
de la utilidad U del agricultor con respecto a la temperatura
promedio v, cuando el caudal promedio del canal de regadío
es u = 10 m 3 /s y la temperatura promedio durante el tiempo de
v 20 °C. Interprete el resultado.
cultivo de los dos productos es =
Solución
De acuerdo a la regla de la cadena, la razón de cambio de la
utilidad U con respecto a la temperatura v es
∂U ∂U ∂x ∂U ∂y
=
⋅ +
⋅
∂v ∂x ∂v ∂y ∂v
El diagrama de dependencias
de las variables es
Al aplicar las fórmulas y reglas de derivación, se tiene
∂U x 1000
−2000
= 2 + (2)
∂v 50 v
v2
u
x
v
U
y
…(∗)
= 10 m 3 / s, =
v 20 °C en
Al evaluar u
u
=
x 20u2 −
v
1000
, resulta x = 1950 kg
v
Luego, al reemplazar estos valores en (∗) , se obtiene
−2000
∂U 1950 1000
+ (2)
87 , 5
=
=
2
(20)2
∂v 50 (20)
Por consiguiente, cuando el caudal promedio del canal de
regadío es u = 10 m 3 / s y la temperatura promedio durante el
tiempo de cultivo de los dos productos es =
v 20 °C, la utili­
dad del agricultor aumenta a razón de S/ 87,5 por cada grado
centígrado de aumento en la temperatura promedio durante el
tiempo de cultivo.
5.
Sea f una función tal que z = f ( x; y) y f x (1; − 2) =
4.
Calcule f y (1; −2) , si para todo t ∈ se tiene
(
)
( )
f t 2 ; 2t 3 = arctan e t +1
358
Cálculo II
Solución
2
=
x t=
, y 2t 3 y derivar con respecto a t ambos
Al considerar
miembros de la siguiente igualdad
(
)
( )
f t 2=
; 2t 3
f=
(x; y) arctan et +1 ,
resulta
El diagrama de dependencias
de las variables es
z
dy
dx
e t +1
= 2t + 2
f x ( x; y ) ⋅ + f y ( x; y )
dt
dt 1 + e
x
t
y
t
e t +1
f x ( x; y)(2t ) + f y ( x; y) 6t 2 =
1 + e 2t + 2
( )
Al reemplazar t = −1, en las expresiones de x, y, y en la
última igualdad, se obtiene
1
f x (1; − 2)(−2) + f y (1; − 2)(6) =
2
Como f x (1; − 2) =
4 , entonces
(4)(− 2) + f y (1; − 2)(6) =
6.
1
17
⇔ f y (1; − 2) =
2
12
Sea f una función diferenciable en 2 tal que
z=
f ( x; y ) , x =
t3 , y =
4t 2 − 3, f (1; 1) =
7 y f y (1; 1) = 2
Si sabe que
dz
dt
= 4 , halle la ecuación del plano tangente
t =1
a la superficie S : z = f ( x; y) en el punto A (1; 1; f (1;1) ) .
Solución
El vector normal del plano tangente a la superficie S : z = f ( x; y)
en el punto A (1; 1; 7) es
=
n f x (1; 1) ; f y (1; 1) ; −1 ,
(
)
donde no se conoce f x (1,1) .
Al aplicar la regla de la cadena para derivar la función f con
respecto a la variable t, resulta
dy
dz
dx
= f x ( x; y ) ⋅ + f y ( x; y )
dt
dt
dt
( )
= f x ( x; y) 3t 2 + f y ( x; y)(8t )
Capítulo 5. Derivadas de funciones de varias variables
359
Al reemplazar t = 1 en las expresiones de x, y y en la deriva­
da total de z, resulta
dz
dt
t =1
=
4 ⇔ f x (1; 1)(3) + f y (1; 1)(8) =
4
⇔ 3 f x (1; 1) + 8 (2) =
4 ⇔ f x (1;1) =
−4
de donde el vector normal a la superficie S : z = f ( x; y) en el
punto A (1,1; 7) es
n = f x (1;1) ; f y (1;1) ; −1 =−
( 4; 2; −1)
(
)
Por lo tanto, la ecuación del plano tangente a la superficie S
en el punto A es:
PT : − 4 ( x − 1) + 2 ( y − 1) − ( z − 7) =
0
⇔ PT : 4x − 2 y + z − 9 =
0
7.
En la ciudad de Chancay un auto A se desplaza hacia el norte
por la carretera Panamericana, mientras que un auto B viaja
hacia el oeste por otra carretera recta desde Huaral; cada uno
se aproxima al óvalo de Chancay, donde se cruzan estas carre­
teras, como se muestra en la figura 5.3.2.En cierto momento, el
auto A está a 2 km del cruce y viaja a 60 km/h mientras que el
auto B está a 1,5 km del cruce y viaja a 40 km/h. ¿Cuál es la ra­
zón de cambio de la distancia entre los autos en ese momento?
B
Huaral
A
Chancay
Fig. 5.3.2
Solución
B
x
y
A
z
Sean x e y las distancias de los autos B y A, respectivamente, al
óvalo de Chancay, y sea z la distancia entre los autos. El diagra­
ma adjunto muestra la posición de los autos en las carreteras.
Por el teorema de Pitágoras y por las condiciones del pro­
blema, se tiene
z=
x2 + y 2 ,
360
Cálculo II
dy
dx
=
− 40 ,
=
− 60
dt
dt
Observe que las derivadas son negativas porque cuando los
autos se acercan al ovalo, las distancias x e y disminuyen.
Según la regla de la cadena, la derivada de z con respecto al
tiempo t es
dz ∂z dx ∂z dy
= ⋅
+
⋅
dt ∂x dt ∂y dt
x
=
x2 + y 2
dx
y
+
dt x 2 + y 2
dy
,
dt
y al reemplazar
=
x 1=
, 5, y 2 en la derivada total, resulta
dz 1, 5
2
=
−72
(−40) +
(−60) =
dt 2, 5
2, 5
Por lo tanto, cuando los autos A y B se encuentran, respec­
tivamente, a 2 km y 1,5 km del óvalo, la distancia entre ellos
disminuye a razón de 72 km/h.
8.
Un fabricante produce equipos industriales que vende en el
mercado nacional y en el extranjero. Se estima que si vende
x máquinas en el mercado nacional e y máquinas en el mer­
cado exterior, el precio al que conseguirá vender cada una en
x y
miles de dólares, mientras
el mercado nacional es 60 − +
5 20
y
x
miles de
que en el exterior venderá cada una a 50 +
−
20 10
dólares. El fabricante estima que el mercado irá cambiando
con el tiempo de tal modo que dentro de t meses sus ventas
t
t
x 261 − 100 (0, 9) e=
y 361 − 100 (0 , 9) . Si el costo de fa­
serán =
bricar una máquina es de $ 10 000, utilice la regla de la cadena
para determinar la razón de cambio de la utilidad del fabrican­
te dentro de 2 meses.
Solución
La utilidad U del fabricante está dada por
x y
x y
= x 60 − + + y 50 + − − (10 x + 10 y)
U
5 20
20 10
Costos
Ingreso por ventas
x 2 y 2 xy
=
− −
+
+ 50x + 40 y
5 10 10
Según la regla de la cadena, la derivada de U con respecto
al tiempo es
dU ∂U dx ∂U dy
=
⋅
+
⋅
dt ∂x dt ∂y dt
Capítulo 5. Derivadas de funciones de varias variables
361
(
)
−2 x y
t
=
+ + 50 −100 (0, 9) ln (0 , 9) +
5
10
(
)
−y x
t
+
+ + 40 −100 (0, 9) ln (0 , 9) ,
5
10
Al evaluar t = 2 en las expresiones de x e y y reemplazar en
la derivada total, resulta
dU −360 280
=
+
+ 50 (−81ln (0 , 9)) +
dt 5
10
−280 180
+
+
+ 40 (−81ln (0, 9)) =
−648 ln (0, 9) ≈ 68, 274
10
5
Por lo tanto, dentro de 2 meses la utilidad del fabricante au­
mentará a razón de 68 274 dólares por mes.
b) El primer cateto mide 2 cm y el segundo
mide 12 cm.
Ejercicios y problemas propuestos 5.3
1.
Sean
x 5 cos (πt ) ,
=
z f ( x; y=
) x3 + y 2 , =
4.
Si el radio mayor R de una corona circular se
incrementa a razón de 0,3 cm/min, mientras
que el radio menor r disminuye a razón de
0,2 cm/min, ¿cuál es la velocidad con la que
cambia el área de la corona circular cuando
r = 4 cm y R = 6 cm?
5.
La demanda mensual de cierto producto es
Q ( x; y) = 4000 − 5x 2 + 8xy unidades, donde
x e y representan el precio de venta del pro­
ducto y el de un producto competidor res­
pectivamente.
=
y 4 sen (πt / 3) y t = u2. Utilice la regla de la
cadena para calcular
dz
dz
b)
a)
du u= 2
dt
2.
Dadas las siguientes funciones
a) =
z
y 2 + x2 , =
x cot (π + t ) , =
y csc (π − t )
b) w =
7 x 2 + 5y3 − 2z 2 , x =
ln (3 − t ) , y =−
u v
z=
u + v, u =
e 7t + sen (t ) , v =
e 7t
utilice la regla de la cadena para hallar
Se estima que dentro de t meses el precio
de dicho producto será =
x 15 + 0, 2 t soles
por unidad, mientras que el precio del pro­
y 12 + 0, 3 t 2 soles
ducto competidor será =
por unidad. ¿Cuál es la razón de cambio de
la demanda Q ( x; y) con respecto al tiempo
dentro de 10 meses?
dz
dw
, en el caso a) y
en el caso b).
dt
dt
3.
362
En un triángulo rectángulo la longitud de
un cateto disminuye a razón de 2 cm /min,
mientras que la longitud del otro cateto au­
menta a una razón de 4 cm /min. Determine
la variación del área de la región triangular
cuando
6.
a) El primer cateto mide 12 cm y el segun­
do mide 8 cm.
=
z g=
( x; y ) 4 ,
Cálculo II
Sean f y g funciones diferenciables en y
2 , respectivamente, tales que
x=
t 2 − 1, y =f (t )
para
todo t ∈. Si f (1) =
− 2, g x (0; − 2) =
3 y
g y (0; − 2) =
2, halle la ecuación de la recta
tangente a la curva y = f (t ) en el punto que
corresponde a t = 1.
7.
Sea f una función real con Dom ( f ) ⊂ 2 tal
que para todo ( x; y) ∈ Dom ( f ) , se tiene
−25 yf x ( x; y) + 36 f y ( x; y) =
120
Si g (t ) = f (5sen (t ) ; 6 cos (t )) , calcule g ’ (t ) .
8.
Sea f una función dada por z = f ( x; y) tal
que para todo t ∈ , se tiene
(
)
( )
f t 5 ; 2t 4 = arccot e t +1
Si f x (−1; 2) =
3/ 5, determine la ecua­
ción del plano tangente a la superficie
S : z = f ( x; y) en el punto A (−1; 2; f (−1; 2)) .
9.
(
)
v
∂z
∂z
+u =
0
∂u
∂v
Si z =f u2 − v 2 ; v 2 − u2 , verifique que
El punto P se mueve de acuerdo con las
2
y
t + 2 . Utili­
ecuaciones x =(t − 1) + 2, =
ce la regla de la cadena para determinar la
razón de cambio de la temperatura T con
respecto al tiempo t en el instante en el que
t = 2 min. Interprete el resultado.
12. Un vértice de un rectángulo OABC es el
origen de coordenadas O (0; 0) ; dos de sus
lados coinciden con los ejes coordenados y
el vértice opuesto a O es el punto movible
B ( x; y) ubicado en el primer cuadrante. Si
x aumenta a razón de 4 cm /s e y disminuye
a razón de 5 cm /s, halle la razón de cambio
del área de la región rectangular OABC,
cuando x = 24 cm e y = 10 cm.
13. El radio de un cono circular recto crece a ra­
zón de 5 cm/s, mientras que su altura decre­
ce a razón de 3 cm/s.
10. Una empresa distribuidora de televisores de
alta definición estima que la demanda men­
sual D (en cientos de televisores) depende
del precio de venta x (en soles) y del monto
invertido en publicidad y (en soles), según la
siguiente función
D = f ( x; y) = 1000 −
donde T está medida en grados centígrados,
y x e y en centímetros.
3y
5x
+
100 1000
Se estima que dentro de t meses el precio
de venta será
=
x 2550 − t 2 y el monto de la
=
y 15000 − 10t .
inversión en publicidad será
¿A qué razón cambiará la demanda mensual
D dentro de cuatro meses?
11. La temperatura en cualquier punto P ( x : y)
a) ¿Cuál es la razón de cambio del volumen
del cono cuando el radio mide 50 cm y la
altura 150 cm?
b) ¿Cuál debería ser la razón de cambio de
la altura para que el volumen del cono
permanezca constante cuando el radio
mide 50 cm y crece a razón de 5 cm/s,
mientras que la altura mide 150 cm?
14. Sean θ el ángulo que forman los lados con­
gruentes de un triángulo isósceles y x la
longitud de estos lados. Si x se incrementa
a razón de 0,1 metros por hora y θ se incre­
menta a razón de π / 90 radianes por hora,
halle la tasa de incremento del área cuando
x = 10 m y θ = π / 4 rad.
de una placa plana de metal está dada por
T ( x; y ) =
32 xy
120 − 2 x 2 − y 2
Capítulo 5. Derivadas de funciones de varias variables
363
17. Sea f una función real con Dom ( f ) ⊂ 3 tal
15. Verifique que la función f definida por
(
=
z f 3u + αt 3 ; 3v + βt 3
)
que para todo x ≠ 0, y ≠ 0, z ≠ 0 , se tiene
donde α y β son constantes, es solución de
la ecuación en derivadas parciales
∂z
∂z
∂z
= αt 2
+ βt 2
∂t
∂u
∂v
x
Dom ( f ) ⊂ 3 y Dom ( g) ⊂ tales que
(
Si f y (0; 0; 7) = 10, calcule g’ (1) .
364
Cálculo II
Verifique que
16. Sean f y g funciones reales con dominios
g (t ) =f 5sen2 (t − 1) ; arctan (2t − 2) ; 7 cos3 (t )
x3 y 3 z 3
w= f 3; 3; 3
y z x
)
∂w
∂w
∂w
+y
+z
=
0
∂x
∂y
∂z
5.4 Derivada direccional de una función de varias variables
En la sección 5.1 se determinó mediante las derivadas parciales la
razón o tasa de cambio instantánea de la variable dependiente de
una función con respecto a una de sus variables independientes,
manteniendo las otras como constantes.
En esta sección se determina la razón o tasa de cambio instantá­
nea de la variable dependiente de una función de varias variables
independientes cuando estas cambian simultáneamente. El cambio
simultáneo de las variables independientes se controla con un vec­
tor unitario que está en el espacio que contiene al dominio de la
función, como se muestra en la siguiente definición.
Definición 1. Derivada direccional de una función
de dos variables en un punto
Sea f una función con Dom ( f ) ⊂ 2 tal que z = f ( x; y) . Si ( x0 ; yo )
es un punto del dominio y u = (u1 ; u2 ) es un vector unitario en 2 ,
la derivada direccional de f en el punto ( x0 ; yo ) en la dirección del
vector u está dada por
f (( x0 ; y0 ) + hu) − f ( x0 ; y0 )
Du f ( x0 ; y0 ) = lim
h →0
h
= lim
h →0
f ( x0 + u1h; y0 + u2 h) − f ( x0 ; y0 )
h
si el límite existe.
El valor de Du f ( x0 ; y0 ) se interpreta como la razón de cam­
bio de la variable dependiente z = f ( x; y) en el punto ( x0 ; y0 ) con
respecto a la distancia, en el plano XY , en la dirección del vector
unitario u .
Ejemplo 1
Calcule la derivada direccional de la función f definida por
f ( x; y) =x 2 + 2xy + y 2 en el punto P0 (1; 2) en la dirección del
vector u =
(−3/5; − 4/5) .
Solución
La derivada direccional de la función f en el punto P0 (1; 2) en la
dirección del vector u es
4
3
f 1 − h; 2 − h − f (1; 2)
5
5
Du f (1; 2) = lim
h →0
h
Capítulo 5. Derivadas de funciones de varias variables
365
2
2
4
4
42 3 49
2 3
−1 −h +h +
h 2 1 − h 2 − h + 2 − h − 9
425
5 25
5
5
Du f (1; 2 ) == lim
= −
lim 5
hh→
→0 0
h
5
h
42
49
h + h2
5
25 = − 42
Du f (1; 2 ) = lim
h →0
h
5
−
Por lo tanto, la derivada direccional de la función f en el punto
P0 (1; 2) en la dirección del vector u es − 42/ 5.
Interpretación geométrica de la derivada direccional de una
función de dos variables
Sea f una función con Dom ( f ) ⊂ 2 tal que la derivada direccional
de la función f en el punto ( x0 ; y0 ) ∈ Dom ( f ) en la dirección del
vector u existe.
Z
LS
( x0 ; y0 ; f ( x0 ; y0 ))
z = f ( x; y )
x0 + hu1
( x0 + hu1 ; y0 + hu2 ; f ( x0 + hu1 ; y0 + hu2 ))
x0
y0
0
y0 + hu2
u
X
Y
Fig. 5.4.1
En la figura 5.4.1, cuando h se aproxime a cero, la recta secante
LS tiende a la posición de la recta tangente LT. Es decir, cuando h se
aproxima a cero, la pendiente
mL =
S
f ( x0 + hu1 ; y0 + hu2 ) − f ( x0 ; y0 )
h
se aproxima a la pendiente de la recta tangente LT , en cuyo caso se
tiene
f ( x0 + hu1 ; y0 + hu2 ) − f ( x0 ; y0 )
=
=
mL lim
Du f ( x0 ; y0 )
T
h →0
h
Por consiguiente, la derivada direccional de la función f en el
punto ( x0 ; y0 ) ∈ Dom ( f ) y en la dirección del vector unitario u, es
la pendiente de la recta tangente LT a la curva de intersección de la
366
Cálculo II
superficie S : z = f ( x; y) con el plano perpendicular al plano XY
que contiene a la recta
L : ( x; y; 0) =
(x0 ; y0 ; 0) + t (u1 ; u2 ; 0) , t ∈
Definición 2. Derivada direccional de una función de n
variables en un punto
Sea f una función con Dom ( f ) ⊂ n tal=
que z f ( x1 ; x2 ; …; xn ) .
=
y u (u1 ; u2 ; …; xn )
Si P0 x1* ; x2* ; …; x*n es un punto del dominio
(
)
es un vecto unitario en n , la derivada direccional de f en el punto
P0 x1* ; x2* ; …; x*n en la dirección del vector unitario u está dada por
(
)
Du
f ( P0 ) = lim
h →0
(
)
f x1* + hu1 ; x2* + hu2 ; …; xn* + hun − f ( P0 )
h
si el límite existe.
Ejemplo 2
Calcule la derivada direccional de la función f dada por
f ( x; y ; z) = xy − z 2 + y 2 en el punto P0 (1; −1; 1) en la dirección
del vector v = (−1; 2; 2) .
Solución
Como v = (−1; 2; 2) no es un vector unitario, entonces el vector
unitario en la dirección de v es
v 1 2 2
u= = − ; ;
v 3 3 3
Luego, la derivada direccional de f en el punto P0 (1; −1; 1) en
la dirección del vector u es
2
2
1
f 1 − h; −1 + h; 1 + h − f (1; −1;1)
3
3
3
Du f (1; −1; 1) =
lim
h →0
h
2
2
2h 2h
2h
h
1 − −1 + − 1 + + −1 + − (−1)
3
3
3
3
= lim
h →0
h
5
2
− h − h2
5
9
= lim 3
=−
h →0
h
3
Nota
Para facilitar la obtención de la derivada direccional de una función
de varias variables se usa el siguiente concepto de gradiente de una
función de varias variables.
Capítulo 5. Derivadas de funciones de varias variables
367
Gradiente de una función de dos variables
Y
Sea f una función con Dom ( f ) ⊂ 2 tal que f x ( x0 ; y0 ) y f y ( x0 ; y0 )
existen. El vector dado por
∇f ( x0 ; y0=
) fx (x0 ; y0 ) ; f y (x0 ; y0 )= fx (x0 ; y0 ) i + f y (x0 ; y0 ) j .
(x0 ; y0 )
0
X
f ( x; y ) = k
Fig. 5.4.2
(
)
se denomina gradiente de f en el punto ( x0 ; y0 ) .
Observación 1
Si f es una función diferenciable en el punto ( x0 ; y0 ) ∈ Dom ( f ) y
∇f ( x0 ; y0 ) ≠ 0 =
(0; 0) , entonces geométricamente ∇f (x0 ; y0 ) es un
vector normal (ortogonal) a la curva de nivel Ck : f ( x; y) = k de f que
pasa por el punto ( x0 ; y0 ) (figura 5.4.2).
Ejemplo 3
Dada la función f definida por f ( x; y=
) x3 − 2 y3 , halle el vector
∇f (−1; −1) y represéntelo geométricamente.
Solución
Dado que f x ( x; y) = 3x 2 y f y ( x; y) = − 6 y 2 , entonces el vector
gradiente de f en cualquier punto ( x; y) ∈ Dom ( f ) es
(
∇f ( x , y) = 3x 2 ; − 6 y 2
)
Luego,
∇f (−1; −1) = (3; − 6) = 3i − 6 j
cuya representación geométrica se muestra en la figura 5.4.3.
C1 : x3 − 2 y3 =
1
Y
0
–2
∇f (−1; −1)
2
X
–2
–4
–6
–8
∇f (−1; −1) =
Fig. 5.4.3
368
Cálculo II
(3; − 6)
Gradiente de una función de n variables
Sea f una función con Dom ( f ) ⊂ n tal que
=
z f ( x1 ; …; xn ) y cuyas
(
)
1, 2, … , n existen en el
derivadas parciales f x x1* ; x2* ; …; xn* , i =
punto
i
(
f x0 x1* ;
P
i
x2* ;
…;
xn*
1, 2, … , n
) ., i =
El vector dado por
=
∇f ( P0 )
(f
x1
(P0 ) ;
)
f x ( P0 ) ; …; f x ( P0 )
2
n
Z
se denomina gradiente de f en el punto P0 .
Observación 2
Si f es una función diferenciable en el punto P0 ( x0 ; y0 ; z0 ) del
dominio de f con ∇f ( x0 ; y0 ; z0 ) ≠ 0 =
(0; 0; 0) , entonces, geométrica-
P0 .
mente, ∇f ( x0 ; y0 ; z0 ) es un vector normal (ortogonal) con res­pecto a la superficie de nivel Sk : f ( x; y ; z) = k que pasa por el punto
P0 ( x0 ; y0 ; z0 ) (figura 5.4.4).
0
X
De acuerdo con la interpretación geométrica, la ecuación
del plano tangente a la superficie Sk : f ( x; y ; z) = k en el punto
P0 ( x0 ; y0 ; z0 ) , es
Y
Fig. 5.4.4
PT : ∇f ( x0 ; y0 ; z0 ) ⋅ (( x; y; z) − ( x0 ; y0 ; z0 )) =⇔
0
PT : f x ( x0 ; y0 ; z0 )( x − x0 ) + f y ( x0 ; y0 ; z0 )( y − y0 ) + f z ( x0 ; y0 ; z0 )( z − z0 ) =
0
Ejemplo 4
Dada la función f definida por f ( x; y ; z) = x 2 + y 2 + z 2 , halle
∇f (2; −2; 2) y represéntelo geométricamente.
z
Z
Solución
A
Como las derivadas parciales de f son
y , f z ( x; y ; z) 2 z
f x ( x; y; z) = 2=
x , f y ( x; y; z) 2=
el vector gradiente de f en cualquier punto ( x; y ; z) ∈ Dom ( f ) es
Y
Xx
y
∇f ( x ; y ; z ) =
( 2 x; 2 y ; 2 z)
Así, para el punto A (2; −2; 2) el vector gradiente de f es
∇f (2; − 2; 2) = (4; − 4; 4) = 4 i − 4 j + 4k
Fig. 5.4.5
cuya representación geométrica se muestra en la figura 5.4.5.
Capítulo 5. Derivadas de funciones de varias variables
369
El siguiente teorema facilita la obtención de la derivada direccional.
Teorema 1
Si f es una función diferenciable en P0 ( x0 ; y0 ) ∈ Dom ( f ) ⊂ 2 , en­
tonces la derivada direccional de f en el punto P0 en la dirección del
vector unitario u = (u1 ; u2 ) es
Du f ( x0 ; y0 ) =
∇f ( x0 ; y0 ) ⋅ u =f x ( x0 ; y0 ) u1 + f y ( x0 ; y0 ) u2
Demostración
Sea g la función real dada por
g ( h) =
f ( x0 + hu1 ; y0 + hu2 ) , h ∈
Dado que f es diferenciable en el punto ( x0 ; y0 ) ∈ Dom ( f ) , enton­
ces g es derivable en h = 0. Así, resulta
g′ (0) = lim
g (h) − g (0)
h →0
h
f ( x0 + hu1 ; y0 + hu2 ) − f ( x0 ; y0 )
= lim
=
Du f ( x0 ; y0 )
h →0
h
Si x =+
x0 hu1 , y =+
y0 hu2 se tiene g (h) = f ( x; y) .
Al aplicar la regla de la cadena en la última igualdad, se obtiene
=
g ′ ( h) f x ( x ; y )
dy
dx
+ f y ( x; y )
=
f x ( x; y) u1 + f y ( x; y) u2
dh
dh
Para h = 0, se obtiene
g′ (0) =
f x ( x0 ; y0 ) u1 + f y ( x0 ; y0 ) u2 =
∇f ( x0 ; y0 ) ⋅ u
Por lo tanto, la derivada direccional de f en ( x0 ; y0 ) ∈ Dom ( f ) en
la dirección del vector unitario u es
Du f ( x0 ; y0 ) =
∇f ( x0 ; y0 ) ⋅ u =f x ( x0 ; y0 ) u1 + f y ( x0 ; y0 ) u2
En general, para una función de n variables se tiene el siguiente
teorema.
Teorema 2
(
)
Si f es diferenciable en P0 x1* ; x2* ; …; xn* ∈ Dom ( f ) ⊂ n , entonces la
derivada direccional de f en el punto P0 en la dirección del vector
u (u1 ; …; un ) está dada por
unitario=
Du f ( P0 ) =∇f ( P0 ) ⋅ u = f x ( P0 ) u1 + f x ( P0 ) u2 + … + f x ( P0 ) un
1
370
Cálculo II
2
n
Ejemplo 5
; y) 3x 2 y + 2 xy 2 , halle la
Dada la función f definida por f ( x=
derivada direccional de f en el punto P (1; −1) en la dirección del
v 3i − 4 j.
vector =
Solución
El vector unitario en la dirección del vector v es
v 3
4
=
u =
; −
v 5
5
Como f x ( x;=
y) 6xy + 2 y 2 y f y ( x; =
y) 3x 2 + 4 xy , el vector
gradiente en cualquier punto ( x; y) ∈ 2 es
(
) (
∇f ( x; y) =f x ( x; y) ; f y ( x; y) =6xy + 2 y 2 ; 3x 2 + 4xy
)
Al evaluar en el punto P (1; −1) , se obtiene
(
)
∇f (1; −1) = f x (1; −1) ; f y (1; −1) =(− 4; −1)
Por lo tanto, la derivada direccional de f en el punto P (1; −1)
en la dirección del vector unitario u es
3
4
8
Du f (1; −1) =
∇f (1; −1) ⋅ u =−
( 4 : −1) ⋅ ; − =−
5
5
5
Ejemplo 6
Sea f una función diferenciable en Dom ( f ) = 2 tal que el plano
tangente a la superficie S: z = f ( x , y) en el punto P0 (−1; 1; f (−1; 1))
0.
es PT : 8x − 18y + z + 3 =
Calcule la derivada direccional de f en el punto A (−1; 1) en la
dirección hacia el punto B (−2; 2) .
Solución
El vector dirección que va de A (−1; 1) hacia B (−2; 2) es
AB = (−1; 1)
Luego, el vector unitario en esta dirección es
1
AB
1
u = = −
;
2
2
AB
Dado que la ecuación general del plano tangente es de
la forma
f x (−1; 1) x + f y (−1; 1) y − z + D =
0
0, se obtiene
de la ecuación del plano tangente 8x − 18y + z + 3 =
f x (−1; 1) =
−8, f y (−1; 1) =
18
Capítulo 5. Derivadas de funciones de varias variables
371
Luego, el vector gradiente en el punto (−1; 1) es
(
)
∇f (−1; 1) = f x (−1; 1) ; f y (−1; 1) =(−8; 18)
Por lo tanto,
1
1
Du f (−1; 1) =∇f (−1; 1) ⋅ u =−
( 8; 18) ⋅ − ; =13 2
2
2
Observación 3
Si en el espacio la dirección de un vector unitario es dada en
términos del ángulo θ que forma dicho vector con la parte positiva
del eje X, entonces el vector unitario (figura 5.4.6) está dado por
=
u (cos θ; sen θ) , 0 ≤ θ ≤ 2π
2
Y
=
u
(cos θ; sen θ) ,
0 ≤ θ ≤ 2π
1
0
=
u (cos θ; sen θ) , 0 ≤ θ ≤ 2π
θ
=
u (cos θ; sen θ) , 0 ≤ θ ≤X2π
Fig. 5.4.6
Ejemplo 7
1
9 3x 2 − y 2 .
Sea f la función dada por f ( x; y) =−
5
Calcule la derivada direccional de f en el punto A (1; −1) en la
dirección de un vector que forma un ángulo de 2π/ 3 rad con la
dirección positiva del eje X.
Solución
El gradiente de la función f en cualquier punto ( x; y) ∈ Dom ( f )
es
∇f ( x ; y ) =
( − 6 x; − 2 y )
5
De acuerdo con la observación 3, el vector unitario que forma
un ángulo θ = 2π/ 3 rad con la dirección positiva del eje X es
u = ( cos ( 2π ); sen( 2π )) = ( − 1 ; 3 )
3
3
2 2
372
Cálculo II
Luego, la derivada direccional de la función f en el punto
A (1; −1) en la dirección del vector u está dada por
3
2 1
3 =+
∇f (1; −1) ⋅ u =
Du f (1; −1) =
− 6; ⋅ − ;
3 5
5
2 2
Propiedades de la derivada direccional
Sea f una función diferenciable en el punto ( x0 ; y0 ) ∈ Dom ( f ) ⊂ 2
tal que z = f ( x; y) .
a) El valor máximo de la derivada direccional de f en el punto
(x0 ; y0 ) se presenta cuando el vector unitario u = (u1 ; u2 ) tie­
ne la misma dirección que el vector ∇f ( x0 ; y0 ) .
En esta dirección, el valor de la derivada direccional de f es
Du f ( x0 ; y0 ) =
∇f ( x0 ; y0 )
b) El valor mínimo de la derivada direccional de f en el punto
(x0 ; y0 ) se presenta cuando el vector unitario u = (u1 ; u2 )
tiene la misma dirección que el vector −∇f ( x0 ; y0 ) .
En esta dirección, el valor de la derivada direccional de f es
Du f ( x0 ; y0 ) =− ∇f ( x0 ; y0 )
c) De las propiedades a) y b) se concluye que la derivada direc­
cional de f en el punto ( x0 ; y0 ) ∈ Dom ( f ) en la dirección de
cualquier vector unitario u está acotada por
− ∇f ( x0 ; y0 ) ≤ Du f ( x0 ; y0 ) ≤ ∇f ( x0 ; y0 )
d) En cualquier dirección u perpendicular al vector ∇f ( x0 ; y0 ) ,
la derivada direccional de f en el punto ( x0 ; y0 ) es cero,
esto es
u ⊥ ∇f ( x0 ; y0 ) ⇒ Du f ( x0 ; y0 ) = ∇f ( x0 ; y0 ) ⋅ u = 0
Dado que la derivada direccional
de f en el punto ( x0 ; y0 ) y en la
dirección del vector u = (u1 ; u2 )
está dada por
Du f ( x0 ; y0 ) =
∇f ( x0 ; y0 ) ⋅ u
=
∇f ( x0 ; y0 ) u cos θ
1
donde θ =
es0.el ángulo que forman
los vectores ∇f ( x0 ; y0 ) y u, el
valor máximo de la derivada di­
reccional en dicho punto ocurre
cuando cos θ =1 (su valor má­ximo),
esto es, cuando θ =0.
Por lo tanto, los vectores
∇f ( x0 ; y0 ) y u tienen la misma
dirección y el valor de la derivada
direccional en esta dirección es
Du f ( x0 ; y0 ) =
∇f ( x0 ; y0 )
e) D−u f ( x0 ; y0 ) = − Du f ( x0 ; y0 )
f) Las derivadas direccionales de f en el punto ( x0 ; y0 ) ∈ Dom ( f )
en las direcciones de los ejes coordenados X e Y coinciden res­
pectivamente con f x ( x0 ; y0 ) y f y ( x0 ; y0 ) , esto es
i =(1; 0) ⇒ Di f ( x0 ; y0 ) =∇f ( x0 ; y0 ) ⋅ i =f x ( x0 ; y0 )
j=
(0; 1) ⇒ Dj f (x0 ; y0 ) =∇f (x0 ; y0 ) ⋅ j =f y (x0 ; y0 )
Nota
Las propiedades anteriores son también válidas para funciones di­
ferenciables de más de dos variables.
Capítulo 5. Derivadas de funciones de varias variables
373
Ejemplo 8
La temperatura, en grados centígrados, sobre la superficie de una
placa metálica está dada por la función
T ( x; y ) =
50 + 101 −
( y − 1)2 (x − 1)2
−
25
25
donde x e y se miden en centímetros.
a) Desde el punto A (4; 5) , ¿en qué dirección la razón de cambio
de la temperatura tiene su máximo valor? ¿Cuál es la razón de
cambio de la temperatura en esta dirección?
b) La temperatura sobre la placa metálica en el punto A (4; 5) ,
en la dirección hacia el punto B (6; 4) , ¿aumenta o disminu­
ye? ¿Cuál es la razón de cambio de la temperatura en dicha
dirección?
Solución
a) El vector gradiente de la función temperatura T ( x; y) en
cualquier punto ( x; y) ∈ Dom (T ) es
(
)
∇T ( x ; y ) =
Tx ( x; y) ; Ty ( x; y)
=
−
25 101 −
1
( y − 1)
25
2
−
(x − 1)
2
(x − 1; y − 1)
25
Luego, la dirección del vector desde el punto (4; 5) para
que la razón de cambio de la temperatura tome su máximo
valor es
∇T (4; 5) =
(−3/ 250; − 4/ 250)
y en esta dirección, la razón de cambio de la temperatura es
DuT (4; 5) =
∇T (4; 5) =
1/ 50
Por consiguiente, en el punto A (4; 5) la temperatura au­
menta a razón de 1/ 50 ≅ 0, 02°C por cada centímetro que se
avance en la dirección del vector
∇T (4; 5) =
(−3/ 250; − 4/ 250)
→
b) El vector que va de A (4; 5) a B (6; 4) es AB
=
tor unitario en dirección de este vector es
u
=
(2; −1)
y el vec­
→
AB 2
1
;−
=
→
5
AB 5
Luego, la derivada direccional de la función T ( x; y) en el
punto (4; 5) en la dirección del vector u es
374
Cálculo II
3
4 2
1
5
DuT (4; 5) =
∇T (4; 5) ⋅ u =−
; −
; − =
−
⋅
250 5
625
5
250
Por lo tanto, en el punto A (4; 5) y en la dirección hacia el
punto B (6; 4) , la temperatura disminuye a razón 5 / 625°C
por cada centímetro de avance en dicha dirección.
Ejercicios y problemas resueltos 5.4
1.
2
Dada la función f definida por f ( x; y) = x 2 ye x + y , halle el vec­
tor gradiente de f en el punto P(–1; 1).
Solución
Las derivadas parciales de f son
2
=
f x ( x; y) 2xye x + y + x 2 y e x + y
2
2
f y ( x; y ) = x 2 e x + y + 2 x 2 y 2 e x + y
2
Luego, el vector gradiente de f en cualquier punto
(x; y) ∈ Dom ( f ) es
∇f ( x; y=
)
(2xye
x+ y2
2
2
+ x2 y e x + y ; x2 e x + y + 2x2 y 2 e x + y
2
)
Por consiguiente, el vector gradiente de la función f en el
punto P (−1; 1) es
∇f (−1; 1) =(−1; 3)
cuya representación geométrica se muestra en la figura 5.4.7.
Y
La curva de nivel de la función f
que pasa por el punto (–1; 1) es
2
C: x2yex+y =1
4
∇f (−1; 1) =(−1; 3)
3
2
2
C :x 2 ye x + y = 1
–4
–2
–1
1
2
0
4
X
–1
–2
Fig. 5.4.7
Capítulo 5. Derivadas de funciones de varias variables
375
2.
Dada la función f definida por f ( x; y)= ln (3x − 2 y + 1)
a) Halle la razón de cambio de f ( x; y) en el punto A (2; −1) en
v (3; − 4) .
la dirección del vector =
b) ¿En qué dirección la derivada direccional de f en el punto
A (2; −1) tiene su máximo valor? ¿Cuál es la derivada direc­
cional de f en el punto A (2; −1) en esta dirección?
Solución
v es(3; − 4)
a) El vector unitario en la dirección del vector =
v 3 −4
=
u =
;
v 5 5
y el vector gradiente de f en cualquier punto ( x; y) ∈ Dom ( f ) es
=
∇f ( x ; y )
; f y ( x; y))
( fx (x; y)=
3
−2
;
3x − 2 y + 1 3x − 2 y + 1
Luego, el vector gradiente en el punto A (2; −1) es
∇ f ( 2; =
−1)
1))
( fx (2; −1) ; fy (2; −=
1 −2
;
3 9
Por consiguiente, la razón de cambio de f en el punto
A (2; −1) en la dirección del vector =
v (3; − 4) es
1 − 2 3 − 4 17
Du f (2; −1) =
∇f (2; −1) ⋅ u =
3; 9 ⋅5; 5 =
45
b) La derivada direccional de f en el punto A (2; −1) alcanza su
valor máximo en la dirección del vector gradiente
1 −2
∇f (2; −1) =
;
3 9
y este valor es
Du f (2; −1) = ∇f (2; −1) =
3.
13
9
Sea la función f dada por f ( x; y ; z) = 3xy e xz − y .
a) Calcule la derivada direccional de la función f en el punto
A (2; 2; 1) en la dirección hacia el punto B (4; 4; 1) .
b) ¿En qué dirección la derivada direccional de f en el punto
A (2; 2; 1) alcanza su valor mínimo y cuál es este valor?
Solución
a) El vector dirección de A (2; 2; 1) hacia B (4; 4; 1) es
AB = (2; 2; 0)
376
Cálculo II
Luego, el vector unitario en esta dirección es
=
u
→
AB 1
1
=
;
; 0
→
2
AB 2
Además, el vector gradiente de f en el punto
(x; y; z) ∈ Dom ( f ) es
(
)
∇f ( x ; y ; z ) =
f x ( x; y ; z) ; f y ( x; y ; z) ; f z ( x; y ; z)
(
= 3e xz − y y + xyz; x − xy; x 2 y
)
Así, en el punto A(2; 2; 1) el vector gradiente de f es
(
)
∇f (2; 2; 1) =
f x (2; 2; 1) ; f y (2; 2; 1) ; f z (2; 2; 1) =−
(18; 6; 24)
Por lo tanto, la derivada direccional
de f en el punto
A(2; 2; 1) en la dirección del vector AB = (2; 2; 0) es
Du f (2; 2; 1) =
∇f (2; 2; 1) ⋅ u
1
1
=
(18; − 6; 24) ⋅ ; ; 0 =6 2
2
2
b) La derivada direccional de f alcanza su valor mínimo
en la dirección del vector −∇f (2; 2; 1) = (−18; 6; − 24) y
este valor es
Du f (2; 2; 1) =− ∇f (2; 2; 1) =− 6 26
4.
Dada la función f ( x; y) = 2x 2 + 3xy − 3y 2 − 11x , halle todos los
vectores unitarios u tales que la derivada direccional de f en
el punto A (3; 1) en la dirección de u sea igual a 3.
Solución
El vector gradiente de f en cualquier punto ( x; y) ∈ Dom ( f ) es
∇f ( x ; y ) =
( fx (x; y) ; fy (x; y)) =
(4x + 3y − 11; 3x − 6 y)
Así, en el punto A (3; 1) el vector gradiente de f es
=
∇f (3; 1)
; f y (3; 1))
( fx (3; 1)=
(4; 3)
Dado que la derivada direccional de f en el punto A (3; 1)
debe ser igual a 3, se tiene
Du f (3; 1) =
∇f (3; 1) ⋅ u =
3
=
3
(4; 3) ⋅ (u1 ; u2 ) =
= 4u1 + 3u2 = 3
Como u = (u1 ; u2 ) es un vector unitario, resulta
u =
u12 + u2 2 = 1
Capítulo 5. Derivadas de funciones de varias variables
377
3
4u1 + 3u2 =
Al resolver el sistema 2
, se obtiene
2
1
u1 + u2 =
=
u
5.
(0; 1)
24
7
ó=
u ; −
25
25
Dada la función f ( x;=
y)
x 2 + y 2 , halle la máxima razón de
cambio de f en cualquier punto ( x; y) ∈ 2 − {(0; 0)} .
Solución
El vector gradiente de
(x; y) ∈ 2 − { (0; 0) } es
=
∇f ( x , y )
la
f
función
; f y ( x; y))
( fx (x; y)=
en
x
;
x2 + y 2
el
punto
x 2 + y 2
y
La máxima razón de cambio de f en el punto
x
;
( y) ∈ 2 − { (0; 0) } es
x
Du f ( x; y) =
∇f ( x ; y ) =
x2 + y 2
6.
2
y
+
x2 + y 2
2
=
1
Sea f una función diferenciable en A (4; 3) . Si se sabe que
f x (4; 3) = − 5 y f y (4; 3) = 8, ¿existe un vector unitario u tal que
Du f (4; 3) = 10 ?
Solución
El valor máximo de la derivada direccional de f en el punto
(4; 3) se presenta cuando el vector unitario u = (u1 ; u2 ) tiene la
misma dirección que el vector gradiente
(
)
∇f (4; 3) =
f x (4; 3) ; f y (4; 3) =
(−5; 8)
En esta dirección, la derivada direccional de f es
Du f (4; 3) =∇f (4; 3) =25 + 64 =89
De acuerdo con la propiedad c) de la derivada direccional,
para cualquier vector unitario u se tiene
− ∇f (4; 3) ≤ Du f (4; 3) ≤ ∇f (4; 3) ⇔ − 89 ≤ Du f (4; 3) ≤ 89
Luego, como 10 ∉ − 89 ; 89 , no existe un vector unitario
u tal que Du f (4; 3) = 10.
378
Cálculo II
7.
Suponga que la superficie de un lago circular está contenida en
el plano XY y que para cualquier punto P ( x; y ; z) del fondo
del lago, se tiene
z = f ( x; y ) =
y2
x2
+
− 25,
400 400
x 2 + y 2 ≤ 10 000
donde x, y, z, están en metros.
a) Si una persona que se encuentra en el punto B (10; 10) de la
superficie del lago comienza a desplazarse hacia el punto
C (13; 14) , ¿la profundidad aumenta o disminuye? ¿Cuál es
su razón de cambio?
b) ¿Cuál es la dirección en la que debe desplazarse la persona
que está en el punto B (10; 10) para que la razón de cambio
de la profundidad del lago sea la mayor posible? En esta
dirección, ¿cuál es la razón de cambio?
Solución
a) El vector dirección
del punto B (10; 10) hacia el punto
C (13; 14) es BC = (3; 4) y su vector unitario es
BC 3 4
;
=
u =
BC 5 5
El vector gradiente
(x; y) ∈ Dom ( f ) es
=
∇f ( x ; y )
(
de
f
en
cualquier
punto
Nota
En este problema se asume que la
profundidad de cualquier punto
P ( x; y; z) del fondo del lago está
y
x
f x ( x; y)=
; f y ( x; y )
;
200 200
)
Para determinar la razón de cambio de la profundi­
dad cuando la persona comienza a desplazarse del punto
B(10; 10), hacia el punto C(13; 14), se calcula la derivada
direccional de f ; esto es
dada por z .
Así, como z es negativo, cuando z
aumenta la profundidad disminu­
ye y viceversa.
1 1 3 4
Du f (10; 10) =
∇f (10; 10) ⋅ u =
0, 07
;
⋅ ; =
20 20 5 5
Luego, como z aumenta, la profundidad del lago dismi­
nuye a razón de
0, 07 metros por cada metro que se avance
en la dirección BC.
b) La razón de cambio de la profundidad del lago es máxima
cuando la razón de cambio de z es mínima. Luego, la perso­
na debe desplazarse en la dirección del vector
−1 −1
−∇f (10; 10) = ;
20 20
Capítulo 5. Derivadas de funciones de varias variables
379
En esta dirección, la razón de cambio de z es
Du f (10; 10) =− ∇f (10; 10) =−
1
1
2
+
=−
400 400
20
Por lo tanto, cuando la persona comienza a desplazarse
desde el punto B (10; 10) en la dirección del vector u, la pro­
fundidad del lago aumenta a razón de 2 / 20 metros por
cada metro que avance en la dirección del vector u.
8.
La temperatura T ( en °C ) en cualquier punto P ( x; y) de una
placa de metal está dada por la función
T ( x; y) =e xy − xy 2 − x 2 y
donde x e y se miden en centímetros.
a) ¿Cuál es la temperatura en el punto P (−1; 1) ?
b) Desde el punto P (−1; 1) , ¿cuál es la dirección en que la ra­
zón de cambio de la temperatura tiene su valor máximo? En
esa dirección, ¿cuál es la razón de cambio de la temperatu­
ra?
c) Si un móvil ubicado en el punto P (−1; 1) comienza a des­
plazarse hacia el punto Q (2; 5) , ¿la temperatura sobre la
placa, aumenta o disminuye? ¿Cuál es la razón de cambio
de la temperatura?
Solución
a) La temperatura en el punto P (−1; 1) es T (−1; 1) =e −1 °C .
b) El vector gradiente de la función temperatura T ( x , y) en
cualquier punto ( x; y) ∈ Dom (T ) es
(
)
∇T ( x ; y ) =
Tx ( x; y) ; Ty ( x; y)
=
(ye
xy
− y 2 − 2xy; xe xy − 2xy − x 2
)
Luego, la dirección del vector desde el punto P (−1; 1) pa­
ra que la razón de cambio de la temperatura tome su valor
máximo es
(
∇T (−1; 1) = e −1 + 1; − e −1 + 1
)
y en esta dirección la razón de cambio de la temperatura es
DuT (−1; 1) = ∇T (−1; 1) = 2e −2 + 2
Por consiguiente, en el punto P (−1; 1) y en la dirección
del vector gradiente, la temperatura aumenta a razón de
380
Cálculo II
2e −2 + 2 °C por cada centímetro que se avance en esta
dirección.
c) El vector que va de P (−1; 1) hacia Q (2; 5) es PQ = (3; 4) y el
vector unitario en esta dirección es
PQ 3 4
=
u =
;
PQ 5 5
Luego, la derivada direccional de la función T ( x , y) en el
punto P (−1; 1) en la dirección del vector u es
DuT (−1; 1)=
(e −1 + 1; − e −1 + 1) ⋅ 53 ; 54 =
7 − e −1
5
Por lo tanto, en el punto P (−1; 1) y en la dirección
hacia el punto Q (2; 5) , la temperatura aumenta a razón de
7 − e −1
°C por cada centímetro de avance en dicha dirección.
5
9.
La sensación térmica que experimenta una persona en
cualquier punto ( x; y; z) del interior de un coliseo cerrado está
dada por
T ( x; y; z=
) 20 +
32
2
4 + 4x + 2 y 2 + 4z 2
donde T se mide en °C y x, y, z en pies.
a) Si un equilibrista se encuentra en el punto P (1; 2; 2) , ¿cuál
es la sensación térmica que experimenta?
b) Si el equilibrista comienza a desplazarse sobre una cuer­
da recta del punto P (1; 2; 2) hacia el punto Q (3; 3; 4) , ¿la
sensación térmica que experimenta aumenta o disminuye?
¿Cuál es la razón de cambio de la sensación térmica?
c) ¿Qué dirección debe seguir el equilibrista que está en el
punto P (1; 2; 2) para que la razón de cambio de la sensa­
ción térmica que experimenta alcance su valor mínimo?
¿Cuál es esa razón de cambio?
Solución
a) La sensación térmica que experimenta el equilibrista en el
punto P (1; 2; 2) es T (1; 2; 2=
) 21°C.
b) Dado que el equilibrista se desplaza del punto P (1; 2; 2) ha­
cia el punto Q (3; 3; 4) , el vector dirección de P hacia Q es
PQ = (2; 1; 2)
Capítulo 5. Derivadas de funciones de varias variables
381
Luego, el vector unitario en esta dirección es
PQ
2 1 2
u =
=
; ;
3 3 3
PQ
El gradiente de la función T en cualquier punto
es
(x; y) ∈ Dom (T )
−32
∇T ( x ; y ; z ) =
4 + 4x2 + 2 y 2 + 4z 2
(
)
2
(8x; 4 y; 8z)
Al evaluar en el punto P (1; 2; 2) , se obtiene
1 1 1
∇T (1; 2; 2) =Tx (1; 2; 2) ; Ty (1; 2; 2) ; Tz (1; 2; 2) =−
;− ;−
4 4 2
(
)
Luego, la razón de cambio de la sensación térmica en el
punto P (1; 2; 2) en la dirección del vector unitario u es
1
1
1 2 1 2 −7
DuT (1; 2; 2) =
∇T (1; 2; 2) ⋅ u =
− ; − ; − ⋅ ; ; =
4
2 3 3 3 12
4
Por lo tanto, la sensación térmica que experimenta el
7
°C por cada pie que
equilibrista disminuye a razón de
12
avance en la dirección del vector PQ.
c) Para que la razón de cambio de la sensación térmica que
experimenta el equilibrista alcance su valor mínimo, debe
seguir la dirección del vector
1 1 1
−∇T (1; 2; 2) = ; ;
4 4 2
y la razón de cambio en esta dirección es
DuT (1; 2; 2) =− ∇T (1; 2; 2) =−
6
4
10. En cada punto P ( x; y; z) de una montaña, la velocidad del
viento (en kilómetros por hora) está dada por la función
V ( x; y ; z) = e10− x
2
− y2 − z2
a) Determine la razón de cambio de la velocidad del viento en
el punto P (1; 2; 3) en la dirección hacia el punto Q (3; 5; 9) .
b) ¿Cuál es el valor máximo de la razón de cambio de la velo­
cidad del viento en el punto P (1; 2; 3) ? ¿En qué dirección
ocurre?
382
Cálculo II
Solución
a) El
vector que va de P (1; 2; 3) hacia Q (3; 5; 9) es
PQ = (2; 3; 6) . Así, el vector unitario en esta dirección es
PQ
2 3 6
=
u =
; ;
7 7 7
PQ
El
vector
gradiente
(x; y; z) ∈ Dom (V ) es
V
de
en
cualquier
(
∇V ( x ; y ; z ) =
Vx ( x; y ; z) ; V y ( x; y ; z) ; Vz ( x; y ; z)
= e10− x
2
− y2 − z2
(−2x;
punto
)
− 2 y ; −2 z )
Luego, el vector gradiente de V en el punto P (1; 2; 3) es
∇V (1; 2; 3) =
−2e − 4 (1; 2; 3)
Por consiguiente, la derivada direccional
de V en el
punto P (1; 2; 3) en la dirección del vector PQ = (2; 3; 6) es
Du V (1; 2; 3) =
∇V (1; 2; 3) ⋅ u =
− 2e − 4 (1; 2; 3) ⋅ (2 / 7; 3/ 7; 6 / 7)
=
− 52e − 4
7
Esto
es, en el punto P (1; 2; 3) y en la dirección del
vector PQ, la velocidad del viento disminuye a razón de
52e − 4 / 7 km / h por
cada kilómetro que se avance en la
dirección del vector PQ.
b) La derivada direccional de V alcanza su valor máximo
−2e − 4 (1; 2; 3) y
en la dirección del vector ∇V (1; 2; 3) =
este valor es
Du V (1; 2; 3) =
∇V (1; 2; 3) =
2e − 4 14
Luego, el valor máximo de la razón de cambio de la velocidad del viento en el punto P (1; 2; 3) es de 2e − 4 14 km/h
por cada kilómetro que se avance en la dirección del
vector gradiente.
11. La ecuación de la superficie de una montaña es
2
z= f ( x; y)= 4400 − 3 ( x − 1) − 4 ( y − 2)
2
Nota
donde z es la altura sobre el nivel del mar de cualquier punto
P ( x; y; z) de la superficie de la montaña, el plano XY coincide
con el nivel del mar, el eje X apunta al este y el eje Y al norte
(las distancias se miden en metros).
Se asume que el punto donde
se encuentra una persona es el
punto que corresponde a su centro de gravedad.
Capítulo 5. Derivadas de funciones de varias variables
383
a) Si un montañista está en el punto A (−8; 9; z0 ) de la superfi­
cie de la montaña, determine la altura sobre el nivel del mar
a la que se encuentra.
b) Si desde el punto A el montañista se desplaza en dirección
suroeste, ¿asciende o desciende? ¿A qué razón de cambio?
c) ¿Cuál es la razón de cambio de la altura a la que se encuen­
tra el montañista si desde el punto A asciende en la direc­
ción de la ladera más pronunciada?
d) ¿Cuál es la razón de cambio de la altura a la que se encuen­
tra el montañista si desde el punto A asciende en la direc­
ción de la cima de la montaña?
Solución
a) Dado que el punto A (−8; 9; z0 ) pertenece a la superficie de
la montaña, la altura del montañista sobre el nivel del mar es
2
2
z0 = f (−8; 9) = 4400 − 3 (−8 − 1) − 4 (9 − 2) = 3961
Luego, el montañista se encuentra a una altura de 3961
metros sobre el nivel del mar.
b) Si el montañista se desplaza hacia el suroeste, el ángulo
que forma esta dirección con la dirección positiva del eje X
es θ = 5π / 4 rad. Así, el vector unitario en la dirección
suroeste es
5π
2
2
5π
u=
;−
−
cos ; sen =
2
4
4 2
El gradiente de la función f en cualquier punto
(x; y) ∈ Dom ( f ) es
∇f ( x ; y ) =
(− 6 (x − 1) ; − 8 ( y − 2) )
Luego, la derivada direccional de f en el punto (−8; 9) y
en la dirección del vector u está dada por
2
2
Du f (− 8; 9) =
∇f (− 8; 9) ⋅ u =(54; − 56) ⋅ −
;−
= 2
2
2
Por lo tanto, si el montañista se desplaza en la dirección
suroeste, asciende a razón de 2 metros por cada metro
que avance.
c) Cuando el montañista asciende desde el punto
A (−8; 9; 3961) , la dirección de la ladera más pronunciada
está dada por el vector ∇f (−8; 9=
) (54; −56) .
384
Cálculo II
Por consiguiente, la razón de cambio de la altura a la que
se encuentra el montañista en esta dirección es
Du f (−8; 9) = ∇f (−8; 9) =2 1513
d) Si el montañista desea desplazarse del punto A hacia la cima de la montaña, el vector dirección tendrá como origen
el punto proyección de A (− 8; 9; 3961) sobre el plano XY
( A' (− 8; 9)) y como extremo el punto proyección de la cima
de la montaña V (1; 2; 4400) sobre el plano XY (V ′ (1; 2)) ,
esto es A ' V=' (9; − 7) . El vector unitario en esta dirección es
A'V ' 9
−7
u =
=
;
A ' V ' 130 130
Luego, la derivada direccional de f en el punto A y en la
dirección del vector unitario u es
−7
9
Du f (− 8; 9) =∇f (−8; 9) ⋅ u =(54; −56) ⋅
;
130 130
=
439 130
65
Por lo tanto, al desplazarse del punto A hacia la cima de
439 130
65
metros por cada metro que avance en la dirección del vector
unitario u.
la montaña, el montanista ascenderá a razón de
Ejercicios y problemas propuestos 5.4
1.
Halle el vector gradiente en el punto P indicado y represéntelo gráficamente con la
curva o superficie de nivel correspondiente
para cada una de las siguientes funciones.
a) f ( x; y) =
x2 + y 2 ,
b) f ( x; y) =
c) f ( x; y) =
P (3; − 4)
x+y
, P (1; 0)
x−y
y
x2 + 1
, P (0; 1)
d) f ( x; y ; z) = x 2 + y 2 − z 2 , P (2; 1; 1)
2.
Para cada una de las siguientes funciones:
a) Halle la derivada direccional en el punto
A en la dirección del vector v.
b) Halle los valores máximo y mínimo de la
derivada direccional de f en el punto A
e indique en cada caso la dirección en la
que ocurre.
i)
2
2
f ( x; y) = e x + y − 25
A (3; − 4) , v =
(−1; 1)
y
ii) f ( x; y) = arctan
x
A (1; 1) , v = (3; 4)
Capítulo 5. Derivadas de funciones de varias variables
385
calcule la derivada direccional de f en el
punto P (1; 2) en la dirección hacia el punto
B (− 4; 5) .
iii) f ( x; y ; z=
) ln (2x + 3y + 6z)
A (3; 2; 0) , v = (3; 2; 6)
3.
Halle la derivada direccional de cada una de
las funciones dadas en el punto A y en la
dirección del vector u que forma un ángulo
θ con la dirección positiva del eje X.
4
2
2
f ( x; y )
a)=
log2 x + y + 3
ln
2
π
A (1; 2) , θ =
6
(
)
b) f ( x; y) = arctan ( xy)
A (1; −1) , θ =
4.
4π
3
Sea f la función definida por
f ( x; y) = 3x 2 − 4xy + 3y 2 − 10 y
Halle todos los vectores unitarios u tales
que
32
Du f (1; 1) =
5
5.
Sea f una función diferenciable en
cualquier punto ( x; y) ∈ Dom ( f ) ⊂ 2 . Si
Du f (1; 2) = 3 y y Du f (1; 2) = − 4, donde
1
2
u1 = (3/ 5; 4/ 5) y u2 = (− 4/ 5; 3/ 5) , calcule
la derivada direccional de f en el punto
A (1; 2) en la dirección del vector v = (1; 1) .
6.
7.
386
Sea f una función diferenciable en cualquier
punto ( x; y) ∈ Dom ( f ) ⊂ 2 . Si u1 y u2 son
vectores unitarios perpendiculares tales que
Du f (1; 2) = −2 y Du f (1; 2) = 3, calcule la
1
2
derivada direccional de f en el punto A (1; 2)
v 4u1 − 3u2 .
en la dirección del vector=
Sean f una función diferenciable en el punto
P (1; 2) y A (1; 2; 3) un punto de la gráfica de
f. Si la ecuación del plano tangente a la gráfica de f en el punto A es 2 x − 6 y + z + 7 =
0,
Cálculo II
8.
Resuelva cada uno de los siguientes
ejercicios.
a) Sea f una función diferenciable en
2 . Si
cada punto ( x; y) ∈ Dom ( f ) =
f x (2; 1) = 3 y f y (2; 1) = 2, ¿existe un
vector unitario u para el cual la derivada
direccional de f en el punto (2; 1) en la
dirección del vector u sea igual a 4?
b) Sea f una función diferenciable en cada
punto ( x; y) ∈ Dom ( f ) ⊂ 2 . Si
∇f ( x; y) =4x 2 + 9 y 2
calcule Du f (1; 2) , donde u es un vector
unitario que forma un ángulo de 60° con
el vector ∇f (1; 2) .
c) Sea f una función diferenciable en
el punto ( x0 ; y0 ) ∈ Dom ( f ) ⊂ 2 . ¿Qué
án­gulo deben formar los vectores u y
∇f ( x0 ; y0 ) para que Du f ( x0 ; y0 ) tome
su valor mínimo?
d) Sea f una función diferenciable
2 . Si
en el punto ( x0 ; y0 ) ∈ Dom ( f ) =
∇f ( x0 ; y0 ) =
5
y
v= k ∇f ( x0 ; y0 ) ,
donde k > 0, calcule la derivada direccional de f en ( x0 ; y0 ) en la dirección
del vector v.
e) Sea f una función diferenciable en el punto
2
(x0 ; y0 ) ∈ Dom ( f ) =
y ∇f ( x0 ; y0 ) =
(3; 4) .
Calcule la derivada direccional de f en
el punto ( x0 ; y0 ) en la dirección hacia el
punto Q ( x0 ; y0 + 2) .
f) Sea f una función definida por
f ( x; y) = ax 2 + bxy + y 2
Si f (−1; 5) =
23, halle los números reales
a y b para que la derivada direccional de
f en el punto P (2; 1) en la dirección del
v (3; − 4) , sea 0 , 2.
vector =
9.
Un grupo de alpinistas escala una montaña
en la Cordillera Blanca, departamento de
Ancash. La ecuación de la superficie de la
montaña es
z=
f ( x; y) =−
6 2x 2 − 3xy + y3
donde z es la altura sobre el nivel del mar
de cualquier punto P ( x; y; z) de la super­
ficie de la montaña, el plano XY coincide
con el nivel del mar, el eje X apunta al este y
el eje Y al norte (las distancias se miden en
kilómetros). Los alpinistas se encuentran en
el punto A (1; 2; 6) a las 0:00 horas en total
oscuridad.
a) Los alpinistas no se ponen de acuerdo
sobre la dirección que deben seguir pa­
ra escalar la montaña, por lo que deciden
calcular las pendientes de la montaña
en el punto A en las direcciones norte y
noroeste. Si deben seguir por la ruta de
mayor pendiente, ¿cuál de las dos direc­
ciones deben elegir?
b) ¿Cuál es la dirección de máxima pen­
diente en A? ¿Cuál es el valor de dicha
pendiente?
a) Si un insecto se encuentra en el punto
A (10; 10; 10) del interior de la caja y co­
mienza a desplazarse en la dirección del
vector v =(−1; − 2; 2) , ¿la concentración
de gas aumenta o disminuye? ¿Cuál es la
razón de cambio de la concentración de
gas en esta dirección?
b) Desde el punto A, ¿en qué dirección la ra­
zón de cambio de la concentración de gas
es mínima? ¿Cuál es la razón de cambio
en esa dirección?
11. En la figura 5.4.8 las coordenadas del vértice
P indican las dimensiones de un paralelepí­
pedo. Si P se desplaza a una nueva posición
Q en el primer octante, las coordenadas de
Q determinan las dimensiones de un nuevo
paralelepípedo.
a) Halle la razón de cambio del volumen
del paralelepípedo en P(2; 3; 5), cuando P
comienza a desplazarse hacia Q(4; 7; 10).
b) Desde el punto P, ¿en qué dirección es
máxima la razón de cambio del volumen
del paralelepípedo? ¿Cuál es la razón de
cambio en esa dirección?
Z
Q
10. Sea P ( x; y; z) un punto del interior de una
caja de experimentación con insectos y ga­
ses tóxicos (x, y, z, se miden en centímetros
en un sistema de coordenadas tridimensio­
nal). La concentración C de un gas tóxico (en
mg/cm3) en el punto P está dada por
1
xy
C
= xy + xz ln
2
100
P
0
Y
X
Fig. 5.4.8
1 ≤ x ≤ 30 , 1 ≤ y ≤ 30 , 1 ≤ z ≤ 30
Capítulo 5. Derivadas de funciones de varias variables
387
5.5Revisión del capítulo
El siguiente esquema resume el contenido del capítulo.
Derivada de funciones
de varias variables
Derivada
direccional
Derivadas parciales
Plano tangente
y recta normal
Regla
de la cadena
Direfencia
total
Ejercicios y problemas resueltos 5.5
1.
En un videojuego tridimensional el jugador desplaza un objeto
móvil de arriba hacia abajo a lo largo de la curva que resulta
al intersecar la superficie S : z =
x 2 + y 2 − 4 con el plano
P : y = 1. A partir del punto A (2; 1; 1) de la curva, el jugador
decide desplazar el objeto a través de la recta tangente. ¿En qué
punto el objeto móvil toca al plano Y Z ?
Solución
Sea C la curva de intersección de la superficie S con el plano
P. Dado que la curva C está contenida en el plano P donde la
ordenada y se mantiene constante en y = 1, un vector dirección
de la recta tangente LT en el punto A es a = (1; 0; f x (2; 1)) .
Al hallar la derivada parcial de f con respecto a x y evaluar
en el punto (2; 1) , se tiene
f x ( x=
; y)
388
Cálculo II
x
x2 + y 2 − 4
2; 1) 2
⇒ f x (=
Luego,
=
a (1=
; 0; f x (2; 1)) (1; 0; 2 )
Así, la ecuación vectorial de la recta tangente que pasa por
el punto A y sigue la dirección del vector a es
L
( x; y ; z) =
(2; 1; 1) + t (1; 0; 2) ,
t ∈
y su forma paramétrica es
x= 2 + t
=
LT : y 1
, t ∈
z = 1 + 2t
Esta recta tangente toca al plano Y Z cuando x = 2 + t = 0, es
decir cuando t = −2, de donde z = −3.
Por lo tanto, el objeto móvil toca al plano Y Z en el punto
(0; 1; −3) .
2.
Dada la superficie
S=
: z f ( x=
; y)
1 2 1 2
x + y
4
16
determine el valor de m y el punto de contacto para que el plano
Q : 2x + my − 2z − 10= 0, m > 0 sea tangente a la superficie S.
Solución
Para determinar la ecuación del plano tangente a la superficie
S se requieren el punto de tangencia B ( x0 ; y0 ; z0 ) y el vector
normal
=
n f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1
(
)
Al hallar las derivadas parciales de primer orden de f y
evaluar en el punto ( x0 ; y0 ) , se tiene
x0
x
f x ( x; y ) =
⇒ f x ( x0 ; y0 ) =
2
2
y0
y
f y ( x; y ) =
⇒ f x ( x0 ; y0 ) =
8
8
Además, de la ecuación del plano tangente Q, el vector nor­
=
nQ (2; m; − 2) . Luego, los vectores normales n y nQ
mal es
son paralelos, es decir, existe un número real λ tal que
n=
λ nQ ⇔ f x ( x0 ; y0 ) ; f y ( x0 ; y0 ) ; −1 =
λ (2; m; − 2)
(
)
x y
⇔ 0 ; 0 ; −1 = (2λ; mλ; − 2λ)
2 8
Capítulo 5. Derivadas de funciones de varias variables
389
De la relación de igualdad de vectores se obtiene el siguien­
te sistema de ecuaciones
x0
2 = 2λ
⋅
y0
8 = mλ ⇔
⋅
−1 =−2λ
x0 = 2
.
y0 = 4 m
.
λ =1 / 2
Así, el punto de tangencia es B (2; 4m; z0 ) .
Para hallar m y z0se tiene en cuenta que el punto B perte­
nece tanto a la superficie S como al plano Q, es decir, las
coordenadas de B verifican sus ecuaciones
2
2
2)
4m)
(
(
B ∈ S ⇒ z0 = f (2; 4m) =
+
=1 + m2
4
16
⋅
B ∈ Q ⇒ 2 (2) + m (4m) − 2z − 10 =
0
0
Al resolver el sistema de ecuaciones y considerar que m > 0 ,
resulta
=
m 2=
, z0 5
Por lo tanto, m = 2 y el punto de contacto es B (2; 8; 5) .
3.
Un fabricante produce dos tipos de pintura: económica y premium. La fabricación de un galón de pintura económica tiene
un costo de S/ 10, mientras que fabricar un galón del tipo premium cuesta S/ 20. Una compañía especialista en estudios de
mercado estima que si el precio de venta de un galón de pin­
tura económica se fija en x soles y el de un galón de pintura
premium en y soles, entonces el fabricante venderá 50 ( y − x)
galones de pintura económica y 4500 + 50 ( x − 2 y) galones de
pintura premium cada mes.
a) Exprese la utilidad mensual U del fabricante por las ventas
de estos dos tipos de pintura en función de los precios de
venta x e y, es decir U = f ( x; y) .
b) Calcule e interprete f (20; 40) y f x (20; 40) .
Solución
a) Los datos del problema y la utilidad por galón de cada uno
de los productos se muestran en la siguiente tabla.
390
Cálculo II
Costo por
galón
Precio
de venta
por galón
Utilidad
por galón
Número de
galones vendidos
Pintura
económica
10
x
x – 10
50 ( y − x)
Pintura
premium
20
y
y – 20
4500 + 50 ( x − 2 y)
Según la tabla, la utilidad mensual U (en soles) por la
venta de los productos es
U = f ( x; y)= 50 ( y − x)( x − 10) + [4500 + 50 ( x − 2 y)] ( y − 20)
=
−50x 2 − 100 y 2 + 100xy − 500x + 6000 y − 90 000
donde x e y son los precios de venta de un galón de pintura
económica y de pintura premium respectivamente.
b) Al reemplazar x = 20 e y = 40, se obtiene
=
U f=
(20; 40) 40 000
Esto significa que cuando el precio de venta del galón
del tipo económico es de S/ 20 y el de un galón de pintura
premium es de S/ 40, la utilidad mensual del fabricante es de
S/ 40 000.
Además, al derivar la función utilidad con respecto
a x, resulta
f x ( x; y ) =
−100x + 100 y − 500
Luego, al evaluar en x = 20 e y = 40, se tiene
f x (20; 40) = 1500
Por consiguiente, cuando el precio de venta del galón de
pintura del tipo económico es de S/ 20 y el de un galón de
pintura premium permanece constante en S/ 40, la utilidad
mensual del fabricante aumenta a razón de S/ 1500 por cada
sol de incremento en el precio de venta de un galón de pin­
tura del tipo económico.
4.
Cada punto A ( x; y) de una placa plana de forma circular está
sometido a una presión P (medida en libras por pulgada cua­
drada) que es directamente proporcional a su distancia del
centro de la placa (considerado como origen de coordenadas).
Las longitudes se miden en pulgadas.
Capítulo 5. Derivadas de funciones de varias variables
391
a) Si la presión en el punto B (3; 4) es de 10 lb/pulg2, exprese
la presión en cada punto A ( x; y) de la placa en términos
de x e y.
b) Calcule la razón de cambio de la presión P en el punto
C (4; 3) cuando x varía pero y permanece constante.
Solución
a) Dado que la presión P en el punto A ( x; y) de la placa es
directamente proporcional a la distancia AO , se tiene
P= k AO
⇔
P= k x 2 + y 2
…
(∗)
donde k es una constante de proporcionalidad.
Como la presión en el punto B (3; 4) es 10 lb/pulg2, al
reemplazar estos datos en (∗) , resulta
10 = k 32 + 42
⇔
k= 2
Luego, la función que expresa la presión P en un punto
A ( x; y) de la placa circular está dada por
=
P 2 x2 + y 2
b) Para calcular la razón de cambio de la presión cuando x va­
ría e y permanece constante, se requiere determinar la deri­
vada parcial de la presión P con respecto a x y evaluar en el
punto (3; 4) , esto es
∂P
2x
=
2
∂x
x + y2
⇒
∂P
∂x
x =3
y=4
6
=
=
1, 2
5
Luego, cuando x = 4 e y permanece constante en y = 3,
la presión P aumenta a razón de 1,2 lb/pulg2 por cada pulga­
da que aumente x.
5.
z f ( x; =
y) xe y − ye x es
Verifique que la función f dada por=
solución de la ecuación
∂3 z
∂3 z
∂3 z
∂3 z
x
y
−
=
−
∂y3 ∂x3
∂x∂y 2
∂x 2 ∂y
Solución
Al aplicar las reglas y fórmulas de derivación se obtienen las
funciones derivadas parciales de f, esto es
392
Cálculo II
∂z
=
xe y − e x ,
∂y
∂2z
∂3 z
y
=
xe
=
∂y 2
∂y3
∂2z
∂3 z
x
=
−
ye
=
∂x 2
∂x3
∂z
=−
e y ye x ,
∂x
∂3 z
∂x∂y 2
∂3 z
= e ,
∂x 2 ∂y
= −e
Al reemplazar estas derivadas en la ecuación dada,
se tiene
(
)
( )
xe y − − ye x= xe y − y −e x
Por lo tanto, la función f verifica la ecuación dada.
6.
Dada la función f definida por
f ( x; y) = 3e
2 x −3 y
1
+
π
∫
y2
4
t
arctan dt + 5 ln ( x − y)
4
a) Utilice diferenciales para estimar el incremento total de
f ( x; y) en el punto A (3; 2) , si x varía de 3 a 3, 01 e y varía
de 2 a 1, 98.
b) Use el resultado obtenido en la parte a) para hallar un valor
aproximado de f (3, 01; 1, 98) .
Solución
a) Una estimación del incremento total de f ( x; y) en el punto
A (3; 2) , cuando ∆ x = dx = 0 , 01 y ∆ y =dy =− 0, 02 está da­
da por df (2; 3) , esto es
∆ f (2; 3) ≈ df (2; 3)
Al aplicar las reglas y fórmulas de derivación el diferen­
cial total de f ( x , y) en cualquier punto ( x , y) ∈ Dom ( f ) es
=
df ( x; y) f x ( x; y) dx + f y ( x; y) dy
2 x −3 y 2 y
y2
5
5
9
e
arctan
= 6e 2 x −3 y +
+
−
+
dx
−
dy
π
x − y
4 x − y
x 3=
, dx 0, 01
=
, y 2
Luego, para=
obtiene
df (3; 2) =
[6 + 5] (0, 01) + −9 +
y dy = − 0 , 02, se
4
arctan (1) − 5 (−0 , 02)
π
= 0, 37
Por lo tanto, el incremento total estimado es 0, 37.
Capítulo 5. Derivadas de funciones de varias variables
393
b) Dado que las coordenadas del punto B (3, 01; 1, 98) se obtie­
nen al incrementar las coordenadas del punto A (3; 2) en
∆x =
0, 01 y ∆ y =− 0, 02, se tiene
f (3, 01; 1, 98=
) f (3 + 0, 01; 2 + (−0, 02))
≅ f (3; 2) + df (3, 2) =
3 + 0, 37 =
3, 37
Por consiguiente, un valor aproximado de f (3, 01; 1, 98)
es 3, 37.
7.
La longitud de la hipotenusa de un triángulo rectángulo se
calcula con un error de 1,5 %. Estime el error porcentual que se
comete al calcular el área de dicho triángulo si se sabe que los
errores porcentuales que se cometen al medir las longitudes de
los catetos son iguales.
Solución
De acuerdo con la figura 5.5.1, el área y la hipotenusa del
triángulo son
=
A
z
y
1
xy ,
2
=
z
Para determinar el error porcentual del área se requiere
conocer los errores porcentuales de los catetos, los cuales se
calculan a partir del error porcentual de la hipotenusa; esto es
x
Fig. 5.5.1
x2 + y 2
dz
EP ( z) ≅=
× 100
z
x
x2 + y 2
=
∂z
∂z
dx + dy
∂x
∂y
x2 + y 2
dx +
y
x2 + y 2
× 100
dy
x2 + y 2
× 100
y 2 dy
dx
×
100
+
× 100
2
2
2
2
x +y y
x +y x
x2
=
x2
=
x2 + y
(EP (x)) +
2
y2
x2 + y 2
(EP ( y))
Dado que EP ( x) = EP ( y) , se tiene
EP ( z) ≅
=
394
Cálculo II
x2
x2 + y
(EP (x)) +
2
x2 + y 2
=
2
2
x + y
(EP (x))
y2
x2 + y 2
(EP (x))
EP ( x))
(=
1, 5 %
Luego, los errores porcentuales en las medidas de los cate­
tos son aproximadamente
E=
P ( x) E=
P ( y) 1, 5 %
Además, el error porcentual del área es
1
1
2 y dx + 2 x dy
dA
≅
× 100
EP ( A)=
× 100
1
A
xy
2
=
dy
dx
× 100 +
× 100
x
y
= EP ( x) + EP ( y) = 1, 5 % + 1, 5 % = 3 %
Por lo tanto, el error porcentual que se comete al calcular el
área del triángulo es aproximadamente de 3 %.
8.
Un balón de fútbol americano tiene la forma de un elipsoide.
Use diferenciales para estimar el volumen del material del que
está hecho el balón si se sabe que las longitudes de los diáme­
tros del núcleo hueco=
son 2a 18
=
cm, 2b 30
=
cm, 2c 20 cm y
el espesor del jebe es 0,5 cm.
El volumen de un elipsoide (cuyas longitudes de sus semie­
jes son a, b y c) está dado por
V=
4π
abc
3
a
Solución
c
b
Fig 5.5.2
El volumen del material del que está hecho el balón es igual
al incremento de volumen, el cual se estima mediante
su diferencial.
El diferencial total del volumen V en cualquier punto
a
;
( b; c) es
dV =
∂V
∂V
∂V
da +
db +
dc
∂a
∂b
∂c
4π
4π
4π
= bc da + ac db + ab dc
3
3
3
Al reemplazar los datos del problema
=
a 9, =
b 15, =
c 10, da
= db
= dc
= 0, 5
se tiene
4π
1
1
1
dV = (15)(10) + 9 (10) + 9 (15) =
250π
3
2
2
2
Por consiguiente, el volumen aproximado del material del
que está hecho el balón del fútbol americano es 250 π cm 3 .
Capítulo 5. Derivadas de funciones de varias variables
395
9.
La empresa IMVIF, S.A., que produce cajas de fibra de vidrio,
tiene una orden para fabricar 5000 cajas cerradas. Las dimen­
siones del interior de cada caja rectangular deben ser: 42 cm
de largo, 21 cm de ancho y 30 cm de altura.
Utilice diferenciales para estimar la cantidad de fibra de vidrio
necesaria para atender la orden si el grosor de las paredes de
cada caja es de 0, 2 cm y en la elaboración de cada caja se pier­
de el 10 % del material inicial.
Solución
La cantidad de fibra de vidrio de que está hecha cada caja es
igual al incremento del volumen de la caja, el cual se estima
mediante su diferencial.
De acuerdo con los datos del problema, se tiene
=
x 42 , =
y 21, =
z 30 , dx
= dy
= dz
= 0, 4
Al aplicar las reglas y fórmulas de derivación a la función
volumen V = xyz, se obtiene
dV =
∂V
∂V
∂V
dx +
dy +
dz
∂x
∂y
∂z
= yzdx + xzdy + xydz
Luego, al reemplazar los datos del problema en dV resulta
dV = (21)(30)(0 , 4) + (42)(30)(0 , 4) + (42)(21)(0 , 4)
= 1108, 8
Como en la elaboración de cada caja se pierde el 10 % del
material inicial V0 , 1108, 8 cm 3 representan el 90 % de dicha
cantidad, esto es
0, 9 V0 = dV = 1108, 8 ⇒ V0 = 1232
Por lo tanto, la cantidad aproximada de fibra de vidrio que
se requiere para atender el pedido de 5000 cajas es
(
)
5000 1232 cm 3 = 6160 000 cm 3
10. Si z =6sen (3πxy) cos (3πxy) +
4 x2 + y
2 ln2
, x =t 3 − 2t , y =4t 3
dz
en t = −1
dt
Solución
calcule
Nota
sen (2=
α) 2sen (α) cos (α)
De acuerdo con la identidad trigonométrica del seno del ángu­
lo doble, resulta
=
z 3sen (6πxy) +
396
Cálculo II
4 x2 + y
2 ln2
Al aplicar la regla de la cadena, se tiene
dz ∂z dx ∂z dy
=
+
dt ∂x dt ∂y dt
4 x2 + y
4 x2 + y
2
=18πy cos (6πxy) + 8x . 2 ln2 3t − 2 + 18πx cos (6πxy) + 2 ln2 12t 2
(
)
(
)
Para t = −1, se tiene x = 1, y = − 4. Luego,
dz
dt
t = −1
= [− 72 π + 8] (1) + [18 π + 1] (12) = 144π + 20
11. En un triángulo rectángulo los catetos opuesto y adyacente
a uno de los ángulos agudos están aumentando a razón de
4 cm /s y 5 cm /s , respectivamente. Calcule la tasa de variación
de la medida del ángulo agudo en el instante en que la longi­
tud del cateto opuesto es de 14 cm y la longitud del adyacente
es de 18 cm.
Solución
En la figura 5.5.3 se muestra un triángulo rectángulo donde
los catetos miden x e y centímetros respectivamente. Luego,
tanα=
y
y
⇒ α= arctan
x
x
y
tanα=
y
y
⇒ α= arctan
x
x
x
Fig. 5.5.3
Según la regla de la cadena, resulta
y dx x dy
dα ∂α dx ∂α dy
= ⋅
+
⋅
=
− 2
+
dt ∂x dt ∂y dt x + y 2 dt x 2 + y 2 dt
Al reemplazar las condiciones del problema
dy
dx
=
x 18
=
, y 14,= 5,= 4
dt
dt
en la última igualdad se obtiene
dα 14 18
1
=
−
5 +
4 =
dt 520 520
260
Por consiguiente, en el instante en que el cateto opuesto
mide 14 cm y el cateto adyacente 18 cm , el ángulo agudo co­
rrespondiente aumenta a razón de 1/260 radianes por segundo.
12. Al calentar un horno metálico que tiene la forma de un tronco
de cono, por efecto de la dilatación los radios de sus bases y su
altura aumentan a razón constante de 0, 3 mm / h . Calcule la ra­
zón de cambio del volumen del horno cuando
=
r 1=
m, R 2 m
y h = 2 m.
Capítulo 5. Derivadas de funciones de varias variables
397
Solución
Dado que el horno metálico tiene la forma de un tronco
de cono, su volumen V está dado por
1
V = πh R2 + r 2 + Rr
3
(
)
donde R, r y h son respectivamente las longitudes del radio de
la base mayor, del radio de la base menor y la altura.
Según la regla de la cadena, la razón de cambio del
volumen es
dV ∂V dR ∂V dr ∂V dh
=
+
+
dt ∂R dt ∂r dt ∂h dt
=
πh
dR πh
dr π
dh
(2R + r ) + (2r + R) + R2 + r 2 + Rr
3
dt
3
dt 3
dt
(
)
Al reemplazar las condiciones del problema
R
= 2000, =
r 1000, =
h 2000,
dR dr dh
= = = 0, 3
dr dt dt
en la última igualdad se obtiene
dV
=106 π + 8 × 105 π + 7 × 105 π = 25 × 105 π
dt
Luego, el volumen del horno aumenta a razón de
25 × 105 π mm3 por hora.
13. Un comerciante se dedica a la venta de ropa deportiva a nivel
nacional. Su ingreso mensual I (en miles de soles) por la venta
de x cientos de polos e y cientos de pantalones es
x2
I =+ 8y 2 x + 2
2
Si se sabe que tanto x como y dependen del tiempo t (en me­
ses) que los dos productos están en el mercado, de tal forma que
x =2 t + 1 , y =
t
2
utilice la regla de la cadena para calcular la razón de cambio
del ingreso mensual del comerciante cuando sus productos
están 3 meses en el mercado.
Solución
Según la regla de la cadena la razón de cambio del ingreso
mensual es
398
Cálculo II
4y2 1
dI ∂I dx ∂I dy
1
= +
=+
x
+ 16 y x
dt ∂x dt ∂y dt
x t +1
2
(
)
Para=
t 3=
, x 4=
, y 3/ 2 , se tiene
dI
dt
t =3
9 1
3 1
28, 25
=
4 + + (16) (2) =
2 2
2 2
Por lo tanto, el ingreso del comerciante aumenta a razón de
S/ 28 250 por mes.
14. Sean f la función definida por
f ( x=
; y)
∫
y
x
1 + t 2 dt
y (a; b) un punto cualquiera de la circunferencia C :x 2 + y 2 =
7.
Calcule el valor máximo de la derivada direccional de f en el
punto (a; b) .
Solución
Al aplicar el segundo teorema fundamental del cálculo, las de­
rivadas parciales de primer orden de la función f en cualquier
2 son
punto ( x; y) ∈ Dom ( f ) =
f x ( x; y ) =
− 1 + x 2 , f y ( x; y) =1 + y 2
Como las funciones derivadas parciales f x y f y son con­
2 , entonces f es dife­
tinuas en cada punto ( x; y) ∈ Dom ( f ) =
2
renciable en .
Luego, el vector gradiente de f en el punto (a; b) es
(
)
(
∇f (a; b) =f x (a; b) ; f y (a; b) =− 1 + a2 ; 1 + b2
)
y su módulo es
∇f (a; b) =
(− 1 + a ) + ( 1 + b )
2
2
2
2
= a2 + b2 + 2
(
)
Dado que el punto (a; b) pertenece a la curva C a2 + b2 =
7 ,
se tiene
∇f (a; b) =
3
Por lo tanto, de acuerdo con la propiedad a) de la derivada
direccional, su valor máximo en el punto (a; b) es
Du f (a; b) =
∇f (a; b) =
3
Capítulo 5. Derivadas de funciones de varias variables
399
15. Para cada punto P ( x; y) del primer cuadrante, sea θ el ángulo
Y
que forma la parte positiva del eje X con el segmento OP, tal
como se muestra en la figura 5.5.4.
P ( x; y )
y
(
)
a) Determine el ángulo θ para el punto P 1; 3 .
(
θ
0
x
Fig. 5.5.4
X
(
)
b) Calcule la razón de cambio de θ en el punto P 1; 3 en la
dirección hacia el punto Q 4; 2 3 e interprete geométrica­
mente el resultado.
)
Solución
De acuerdo con los datos del problema, se tiene
y
y
⇒=
θ f ( x; y=
) arctan
x
x
tan=
θ
(
)
a) Para el punto P 1; 3 el ángulo θ es
3 π
=
θ f=
1; 3 arctan
=
1 3
(
)
b) El vector unitario en la dirección del vector PQ = 3; 3 es
3; 3 3 1
PQ
u =
=
=
;
PQ
PQ 2 2
(
(
)
El vector gradiente
(x; y) ∈ Dom ( f ) es
=
∇f ( x ; y )
f
de
; f y ( x; y))
( fx (x; y)=
en
)
cualquier
punto
−y
x
; 2
2
2
2
x + y x + y
(
)
Así, el vector gradiente en el punto P 1; 3 es
; f y (1; 3 ))
) ( fx (1; 3)=
(
=
∇f 1; 3
− 3 1
;
4 4
(
Luego, la derivada direccional de f en el punto P 1; 3
en la dirección hacia el punto Q 4; 2 3 es
(
)
− 3
Du f 1; 3 =
∇f 1; 3 ⋅ u =
;
4
(
)
(
)
(
1 3 1
1
; =
−
⋅
4 2 2
4
Por lo tanto, en el punto P 1; 3
(
)
)
)
y en la dirección
hacia el punto Q 4; 2 3 , el ángulo θ disminuye a razón
de 0 , 25 radianes por cada unidad de longitud que avance
en la dirección PQ.
400
Cálculo II
16. Determine la dirección en la que la derivada direccional de la
función dada por
y 2 − x2
f ( x; y)= 4 − 2e x
2
+ y2 + 4
en el punto B (−1; 1) es igual a cero.
Solución
El vector gradiente de f en cualquier punto
2 es
(x; y) ∈ Dom ( f ) =
∇f ( x ; y ) =
( f x ( x; y ) ;
)
f y ( x; y )
y 2 − x2
=
ex
(x
2
2
+ y2 + 4
2
)
+y +4
2
(8x (y
2
)
(
))
+ 2 ; − 8y x2 + 2
Como las funciones derivadas parciales f x y f y son conti­
nuas en todo punto ( x; y) ∈ Dom ( f ) , entonces f es diferenciable
2
en .
Así, en el punto B (−1; 1) el vector gradiente de f es
2
2
∇f (−1; 1) = f x (−1; 1) ; f y (−1; 1) = − ; −
3
3
Además, si u = (u1 ; u2 ) es un vector unitario en el que la
derivada direccional de f en el punto B (−1; 1) es igual a cero,
esto es
Du f (−1; 1) =
∇f (−1; 1) ⋅ u =
0
(
)
entonces
2 2
0
0
u1 + u2 =
− 3 ; − 3 ⋅ (u1 ; u2 ) =
⇔
2
2
1
u1 + u2 =
2
2
=
+
=
u
u
u
1
1
2
Al resolver el sistema se obtiene
1
1
1
1
u1 =
, u2 =
−
ó u1 =
−
, u2 =
2
2
2
2
Por lo tanto, el vector unitario u en el que la derivada
direccional de f en el punto B (−1; 1) en la dirección de u es
igual a cero, es
1
1
1
1
u=
; −
;
ó u=
−
2
2
2
2
Capítulo 5. Derivadas de funciones de varias variables
401
17. Suponga que la altura sobre el nivel del mar del volcán Sarasa­
ra en cada punto P ( x; y; z) de su superficie está dada por
z = f ( x; y) = 5505 −
y2
x2
−
400 900
donde x, y y z se miden en metros y
y2
x2
1
Dom ( f ) =( x; y) ∈ 2 /
+
≤
(800)2 (1200)2
Un pastor se encuentra en el punto A (− 400; 600; z0 ) .
a) ¿A qué altura se encuentra el pastor? ¿Cuál es la ecuación de
la curva de nivel donde se encuentra el pastor?
b) ¿En qué dirección correrá el agua de lluvia que cae donde se
encuentra el pastor?
c) ¿Cuál es la dirección de máxima pendiente en el punto don­
de se encuentra el pastor?
d) ¿Qué dirección debe seguir el pastor para caminar direc­
tamente hacia la cima del volcán? ¿Cuál es el valor de la
pendiente?
Solución
a) Dado que el punto A (− 400; 600; z0 ) pertenece a la superfi­
cie del volcán, su altura sobre el nivel del mar es
z0 =
f (− 400; 600) =
5505 −
(− 400)2 (600)2
400
−
900
=
4705
Para la altura z = 4705, la ecuación de la curva de nivel es
f ( x; y) = 5505 −
y2
y2
x2
x2
−
= 4705 ⇔
+
= 800
400 900
400 900
Luego, el pastor se encuentra a una altura de 4705 metros
sobre el nivel del mar y la ecuación de la curva de nivel para
esta altura es
y2
x2
800
+
=
400 900
b) El gradiente de la función f en cualquier punto
(x; y) ∈ Dom ( f ) es
y
x
∇f ( x ; y ) =
− 200 ; − 450
Al evaluar en el punto (− 400; 600) , se obtiene
4
∇f (− 400; 600)= 2; −
3
402
Cálculo II
Luego, la dirección del vector en el plano XY para
que el agua de lluvia que cae donde se encuentra el pas­
tor descienda con mínima pendiente a partir del punto
A (− 400; 600; 4705) , es
−∇f (− 400; 600) = − 2;
4
3
c) La dirección de máxima pendiente en el punto A donde se
encuentra el pastor está dada por el vector
4
∇f (− 400; 600)= 2; −
3
d) Si el pastor empieza a caminar desde el punto A hacia la
cima del volcán, el vector dirección tendrá como origen el
punto proyección de A (− 400; 600; 4705) sobre el plano
XY ( A' (− 400; 600)) y como extremo el punto proyección
de la cima del volcán V (0; 0; 5505) sobre el plano XY
' V ' (400; − 600) . El vector unitario en
(V ′ (0; 0)) , esto es A=
esta dirección es
−3
A'V '
2
=
u =
;
A'V '
13 13
Luego, la derivada direccional de f en el punto A y en la
dirección del vector unitario u es
Du f (− 400; 600) =∇f (− 400; 600) ⋅ u
4 2
−3
= 2; − ⋅
;
=
3 13 13
8
13
Por lo tanto, para dirigirse hacia la cima del volcán el
pastor debe caminar en la dirección del vector
2
−3
u=
;
13 13
y la pendiente en esta dirección es
8
Du f (− 400; 600) =
13
Capítulo 5. Derivadas de funciones de varias variables
403
Ejercicios y problemas propuestos 5.5
1.
El departamento de marketing de una empre­
sa estima que si se gastan x miles de dólares
anuales en publicidad en paneles e y miles
de dólares anuales en publicidad en televi­
sión, las ventas anuales en miles de dólares
estarán dadas por
a) Determine una función U que exprese
la utilidad de la empresa agroindustrial
cuando vende x toneladas de alcachofas e
y toneladas de espárragos a la cadena de
supermercados.
b) Calcule e interprete U (1; 2) y U x (1; 2) .
4.
V = 90 x1/ 4 y3/ 4
Si la utilidad anual es igual al 20% de las
ventas menos el gasto anual en publicidad
en paneles y televisión:
a) Determine una función U que exprese
la utilidad anual (en miles de dólares) en
términos de x e y.
b) Calcule e interprete
U (16; 16) y U x (16; 16) .
2.
La empresa MIFEV, S.A. ha sido selecciona­
da para participar en un evento como pro­
veedora de envases para bebidas gaseosas
diseñadas en forma de tronco de cono. La
empresa ha propuesto un envase de 12 cm
de altura y radios en las bases R = 5 cm y
r = 3 cm (figura 5.5.5), y la organizadora del
evento le ha pedido que analice cómo cam­
bia la capacidad del envase cuando cambia
solo la longitud del radio de la base menor.
R
Una recta tangente a la superficie
(
h
)
S:z =
f ( x; y ) =
x 2 + y 2 cos (πxy)
r
está contenida en el plano x = 1. Si el pun­
to de contacto es A (1; 1; − 2) , determine el
punto de intersección de dicha recta tangen­
te con el plano XZ.
3.
Una empresa agroindustrial que provee de
alcachofas y espárragos a una cadena de
supermercados estima que si vende x tone­
ladas de alcachofas e y toneladas de espárra­
gos, la cadena de supermercados le pagará
( y − 2x + 1) miles de soles por cada tonelada
de alcachofas y (5 − 2x − y) miles de soles
por cada tonelada de espárragos. Además,
el costo (en miles de soles) de producción,
almacenamiento y transporte de estas x to­
neladas de alcachofas e y toneladas de espá­
rragos es
C ( x; y) = 4x 2 − 4xy − 5x + 4 y + 2
404
Cálculo II
Fig. 5.5.5
En este contexto, si la capacidad del enva­
se está dada por
=
V f ( r ; R; =
h)
πh 2
R + Rr + r 2
3
(
)
calcule e interprete fr (3; 5; 12) .
5.
Dada la superficie
S : z = f ( x; y) = 3x 2 y − 2 y 2 − cos (4πx)
a) Determine la ecuación del plano tangen­
te a la superficie S en el punto de contacto
P (1; y0 ; 0) si se sabe que su vector nor­
mal=
es n (6; b ; −1) .
b) Si una recta tangente a la superficie S en
1
1
el punto de contacto Q ; y0 ; f ; y0
4
4
está contenida en un plano paralelo al
plano XZ y tiene pendiente igual a 6,
calcule el valor de y0 y determine la
ecuación vectorial de la recta tangente.
6.
9.
Dada la superficie
2
S :z =
f ( x; y ) =
−41 − ( x − 6) − ( y − 2)
2
determine el valor de m y el punto de contacto
para que el plano Q : z − mx + 4 y +=
1 0, m > 0,
sea tangente a la superficie S.
7.
respectivamente, use diferenciales para esti­
mar el error propagado y el error porcentual
máximos que se cometen al calcular el área
A de la cara rectangular superior de la cuña.
Una empresa importa y vende dos modelos,
A y B de reproductores de discos Blu-ray.
Si importa x cientos de unidades del mo­
delo A e y cientos de unidades del modelo
B, estima que venderá cada unidad de A a
500 −2 x + 3y dólares y cada unidad del mo­
delo B a 600 + x − 2 y dólares. Cada unidad
de cualquiera de los dos modelos la compra
a $ 50.
a) Determine una función U que exprese
la utilidad anual (en dólares) en términos
de x e y.
b) Calcule e interprete U (3; 6) y U x (3; 6) .
8.
Las dimensiones del rectángulo de la ba­
se y la altura de una cuña de madera son
=
a 16
=
cm, b 10 cm y h = 12 cm, como se
muestra en la figura 5.5.6.
A
h
Se han fabricado 500 tapones de monoblock
para cierta marca de automóviles. Estos tapo­
nes son sólidos fabricados en bronce y tienen
la forma de un cilindro circular recto. Las
medidas que le dieron al fabricante fueron:
0,8 cm de altura y 1,4 cm de radio en la base.
Al probarlos, los tapones han quedado un
poco grandes, así que se ha contratado a un
tornero para que los desgaste en forma uni­
forme. Según las nuevas medidas, la altura
debe ser 0,78 cm y el radio de la base 1,39 cm.
a) Calcule, usando diferenciales, la canti­
dad aproximada de bronce que se retira
de los 500 tapones.
b) Si el tornero cobra S/ 2,5 por cada cm3 de
bronce retirado, calcule la cantidad apro­
ximada de dinero que se le pagará.
10. La ley de Poinseuille mide la intensidad de
la sangre que pasa a través de una arteria y
está dada por
I=
k R4
L
donde k es una constante, R es el radio de la
arteria y L es su longitud.
Si se comete un error máximo de 1, 5 % al
medir R y de 3% al medir L, estime median­
te diferenciales el error porcentual máximo
que se comete al calcular la intensidad.
11. En un circuito eléctrico, cuando la corriente
b
a
Fig. 5.5.6
Si los errores que se cometen al medir el
largo a, el ancho b y la altura h de la cuña
son, a lo más, de 0,02 cm, 0,01 cm y 0,02 cm
fluye a través de tres resistencias R1 , R2 y R3
conectadas en paralelo, la resistencia total R
del circuito está dada por
R=
R1 R2 R3
R1R2 + R1R3 + R2 R3
Capítulo 5. Derivadas de funciones de varias variables
405
Si los errores relativos al medir R1 , R2 y
R3 son a lo más 0, 002, utilice diferenciales
para estimar el error porcentual máximo
que se comete al calcular R.
12. Un abrevadero tiene un largo L de 10 me­
tros. Sus secciones transversales son trape­
cios isósceles en los que la base menor b, la
base mayor B y la altura h, miden, respecti­
vamente, 2m , 4m y 1m, como se muestra en
la figura 5.5.7.
B
L
h
tranjero. Se estima que si vende x máquinas
en el mercado nacional e y máquinas en el
extranjero, el precio al que consigue ven­
der cada una en el mercado nacional es de
y
x
miles de dólares, mientras que
40 −
+
30 20
en el mercado extranjero alcanza un precio
y
x
miles de dólares. El ingeniero
de 30 +
−
40 10
ro estima que el mercado irá cambiando en
el tiempo, de tal modo que dentro de t meses
t2 + 3
t+7
e y=
. Si el
t +1
t+2
costo de fabricar cada máquina es de $ 8000,
utilice la regla de la cadena para calcular la
tasa de cambio de las utilidades del fabri­
cante dentro de 3 meses.
sus ventas serán x =
15. Sea θ el ángulo formado por los lados de
b
Fig. 5.5.7
a) Exprese el volumen del abrevadero en
función de las medidas de la sección
transversal y su largo.
b) Si los errores máximos que se cometen al
medir las longitudes del abrevadero son
∆L =
0, 2 cm, ∆ b =
0 ,1cm , ∆ B =
0,15 cm ,
0, 2 cm , utilice diferenciales pa­
y ∆h =
ra estimar el error propagado y el error
porcentual máximos que se cometen en
el cálculo del volumen del abrevadero.
13. Sea f una función dada por
=
z f ( x; y=
) ex
2
− y2
− xy + yx
donde,
∂z ∂z
cuando
=
r
+
∂r ∂s
=
2 ys
π
.
4
14. Un ingeniero industrial produce máquinas
que vende en los mercados nacional y ex­
406
Cálculo II
16. Un circuito eléctrico simple está compuesto
por una resistencia y una batería. Debido al
uso, el voltaje V de la batería disminuye a
razón de 0, 2 voltios/segundo, mientras que
debido al calentamiento, la resistencia R au­
menta a razón de 0 , 6 ohmios/segundo. Si el
V
circuito cumple la ley de Ohm I = , deterR
mine la razón de cambio de la intensidad I
cuando R = 500 ohmios e I = 0,03 amperios.
17. Una función f diferenciable en el punto
=
x rcos
=
(s) , y rsen (s)
Calcule
igual longitud de un triángulo isósceles y x
la longitud de estos lados. Si x aumenta a ra­
zón de 0 , 2 metros por minuto y θ decrece a
razón de π / 60 radianes por minuto, halle la
tasa de incremento del área cuando x = 12 m
y θ = π / 6 rad.
A (−1; 1; 1) ∈ Dom ( f ) ⊂ 3 tiene derivada direc­­cional en dicho punto igual a 2 en la
=
a (2; 2; −1) , igual a
dirección del vector
– 4 en la dirección del vector b = (3; 0; 4)
e igual a –2 en la dirección del vector
c = (0; −3; − 4) .
a) Determine ∇f (−1; 1; 1) .
19. Halle el número λ para que la derivada
b) Calcule la derivada direccional de f en el
punto A (−1; 1; 1) en la dirección del vec­
=
v (1; 1; −1) .
tor
18. Dada la función
f=
(x; y) arctan x3 ( y − 2)3 − 2 g (x; y)
direccional de la función f dada por
(
en el punto P (3; 4) , en la dirección del
a (1; λ) sea igual a
vector =
20. Sea f la función definida por
2
donde
g ( x; y=
) xy +
∫
y
cos2 (πt )
1
t
)
f ( x; y)= cos3 (πxy) + ln x 2 + y 2 − 24
2
f ( x; y ; z) =
ae x − y + 4b (arctan ( yz)) + cx3 z
dt
a) Calcule la derivada direccional de f en el
punto A (−1; 2) en la dirección del vector
=
v (3; − 4) .
Determine los valores de las constantes a,
b y c para que el valor máximo de la deri­
vada direccional de la función f en el pun­
to A (1; −1; 1) sea 20 y ocurra en la dirección
positiva del eje Y.
b) ¿Cuál es el valor máximo de la derivada
direccional de f en el punto A (−1; 2) ?
Capítulo 5. Derivadas de funciones de varias variables
407
Capítulo
6
Máximos y mínimos de
funciones de varias variables
En este capítulo se estudia la optimización
de funciones de varias variables. Para ello
se recurre a las herramientas del álgebra
matricial y del cálculo diferencial de funciones de varias variables.
Sabes
Capacidades necesarias:
ü Calcular derivadas parciales de una
función de varias variables.
ü Determinar la continuidad de una
función de varias variables.
ü Calcular el determinante de una
matriz.
Conocimientos previos
Determinante de una matriz.
Gráfica de funciones de dos variables.
Continuidad de una función de varias
variables.
Derivadas parciales de una función de
varias variables.
Piensas
Habilidades por desarrollar:
ü Determinar máximos y mínimos no
condicionados de una función de
varias variables.
ü Hallar máximos y mínimos condicionados de una función de varias
variables.
Secciones
6.1 Extremos no condicionados de una
función de varias variables
6.2 Máximos y mínimos condicionados
6.3 Revisión del capítulo
Haces
Competencias por alcanzar:
ü Resolver ejercicios y problemas que
involucren el cálculo de máximos
y mínimos de funciones de varias
variables.
En muchos problemas de la vida real es necesario determinar los valores máximo o mínimo de funciones de varias variables. Por ejemplo:
• Minimizar el costo de producción de un artículo que depende del costo
de los insumos utilizados y de la cantidad de horas trabajador utilizadas
en su elaboración.
• Maximizar la utilidad de la producción y venta de un artículo que depende del costo de los insumos utilizados y de la cantidad de horas hombre
utilizadas en su elaboración, sujeta a la condición de que la inversión en
publicidad es constante.
Estos problemas, llamados de optimización, se resuelven mediante las derivadas parciales. En este capítulo se presentan dos tipos de problemas de optimización: problemas de optimización sin restricción y problemas de optimización
con restricción expresada mediante una ecuación. En el primer caso se utilizan
los conceptos de función objetivo, puntos críticos y matriz hessiana. En el segundo caso se utiliza el método de los multiplicadores de Lagrange que considera los conceptos de función objetivo, función de Lagrange y matriz hessiana
orlada. En ambos casos se establecen criterios para determinar los extremos de
la función objetivo.
La matriz hessiana fue introducida en 1843 por el matemático alemán
Ludwig Otto Hesse (1811-1874).
410
Cálculo II
6.1 Extremos no condicionados de una función
de varias variables
El objetivo de esta sección es resolver problemas de optimización
sin restricciones mediante el uso de las derivadas parciales de funciones de varias variables.
Para una función f con Dom ( f ) ⊂ 2 ,
las representaciones gráficas de
máximo y mínimo absolutos se
muestran en las figuras 6.1.1 y 6.1.2
respectivamente.
Z
f(x0; y0)
P(x0; y0; f(x0; y0))
Punto de
máximo
absoluto
Máximos y mínimos absolutos
Sean f una función con Dom ( f ) ⊂ n y A (a1 ; …; an ) ∈ Dom ( f ) .
a) Se dice que la función f tiene máximo absoluto en el punto
A (a1 ; …; an ) , si
f (a1 ; …; an ) ≥ f ( x1 ; …; xn ) , ∀ ( x1 ; …; xn ) ∈ Dom ( f )
El número
absoluto de f.
f (b1 ; …; bn ) ≤ f ( x1 ; …; xn ) , ∀ ( x1 ; …; xn ) ∈ Dom ( f )
El número
absoluto de f.
x0
f (b1 ; …; bn ) se denomina valor mínimo
(x0; y0)
X
y0
Y
Fig. 6.1.1
f (a1 ; …; an ) se denomina valor máximo
b) Se dice que la función f tiene mínimo absoluto en el punto
B (b1 ; …; bn ) , si
0
0
Z
Punto de
mínimo
absoluto
f(x0; y0)
x0
P(x0; y0; f(x0; y0))
y0
Y
(x0; y0)
0
X
Fig 6.1.2
Ejemplo 1
En la gráfica de la función f (figura 6.1.3) cuya regla de correspon1 x 2 + y 2 , se observa
dencia es f ( x; y) =+
Z
z
a) Dom ( f ) = 2 y Ran ( f =
) [1; + ∞
Ran ( f =
) [1; + ∞
b) La función f tiene un mínimo absoluto en el punto A (0; 0)
pues se verifica
1 =f (0; 0) ≤ f ( x; y) =+
1 x 2 + y 2 , ∀ ( x; y) ∈ Dom ( f )
c) Como el paraboloide se abre ilimitadamente hacia arriba, la
función f no tiene valor máximo absoluto (Ver figura 6.1.3).
x
X
(0; 0; 1)
Y
y
Fig. 6.1.3
Ejemplo 2
En la gráfica de la función
0
Z
f (figura 6.1.4) cuya regla de
1 − x 2 + y 2 , se observa
correspondencia es f ( x; y) =
1
a) Dom ( f ) = 2 y Ran ( f ) = − ∞; 1]
b) La función f tiene un máximo absoluto en el punto A (0; 0) ,
pues se verifica
1=
f (0; 0) ≥ f ( x; y) =
1 − x2 + y 2 ,
∀ ( x; y) ∈ Dom ( f )
Y
X
Fig. 6.1.4
Capítulo 6. Máximos y mínimos de funciones de varias variables
411
Como el semicono se abre ilimitadamente hacia abajo, la función
f no tiene valor mínimo absoluto (figura 6.1.4).
Z
Ejemplo 3
En la gráfica de la función f (figura 6.1.5) cuya regla de
correspondencia es f ( x; y=
) y 2 − x2 , se observa:
0
Y
a) Dom ( f ) = R 2 y Ran ( f ) = R
b) La función f no tiene máximo ni mínimo absoluto, pues la
gráfica se abre ilimitadamente hacia arriba y hacia abajo.
X
Fig 6.1.5
Observación 1
Región cerrada
n
Se dice que una región D ⊂ R es
cerrada si todos los puntos de su
frontera pertenecen a la región.
Un punto pertenece a la frontera de
una región si toda vecindad centra­
da en el punto contiene puntos de
la región y de su complemento.
Región acotada
n
Se dice que una región D ⊂ R
es acotada si existe una esfera que
contiene a D.
En los ejemplos 1 y 2 se muestran funciones que tienen solamente
un valor extremo absoluto, mientras que en el ejemplo 3 se muestra
una función que no tiene valores extremos absolutos. El siguiente
teorema muestra condiciones suficientes para que una función real
de dos variables tenga ambos valores extremos absolutos.
Teorema 1. Existencia de extremos absolutos
Si f es una función continua en una región cerrada y acotada D ⊂ R n ,
entonces existen puntos A (a1 ; …; an ) y B (b1 ; …; bn ) en D, tales que
f tiene máximo absoluto en A y mínimo absoluto en B, es decir,
f (b1 ; …; bn ) ≤ f ( x1 ; …; xn ) ≤ f (a1 ; …; an ) , ∀ ( x1 ; …; xn ) ∈ D
Ejemplo 4
En la gráfica de la función f (figura 6.1.6) cuya regla de
correspondencia es f ( x; y) =2 + 9 − x 2 − y 2 , se observa
f)
a) Dom ( =
5 =f (0; 0) ≥ f ( x; y) =2 + 9 − x 2 − y 2 , ∀ ( x; y) ∈ Dom ( f )
5
c) La función f tiene un mínimo absoluto en cualquier punto
P (a; b) de la circunferencia C :x 2 + y 2 =
9 , pues se verifica
2
X
0
Fig 6.1.6
412
Cálculo II
y Ran ( f ) = [ 2; 5 ] .
b) La función f tiene un máximo absoluto en el punto A (0; 0) ,
pues se verifica
Z
3
{ ( x; y ) ∈ R 2 / x 2 + y 2 ≤ 9 }
3
Y
2 =f (a; b) ≤ f ( x; y) =2 + 9 − x 2 − y 2 , ∀ ( x; y) ∈ Dom ( f )
9. Luego,
En efecto, si P (a; b) ∈ C , entonces a2 + b2 =
f (a; b) =2 + 9 − ( a2 + b2 ) =2
Máximos y mínimos locales
Sean f una función real con Dom ( f ) ⊂ R n y A (a1 ; …; an ) ∈ Dom ( f ) .
a) Se dice que f tiene máximo local o relativo en el punto
A (a1 ; …; an ) si existe una vecindad con centro en A y radio
r > 0 tal que
Una vecindad con centro A y radio
r es el conjunto
{
B ( A; r ) =
P ∈ R n / d ( P ; A) < r
}
f (a1 ; …; an ) ≥ f ( x1 ; …; xn ) , ∀ ( x1 ; …; xn ) ∈ B ( A ; r ) ⊂ Dom ( f )
El número f (a1; ...; an ) se llama valor máximo local o rela­
tivo de f.
b) Se dice que f tiene mínimo local o relativo en el punto
C (c1 ; …; cn ) si existe una vecindad con centro en C y radio
r > 0 tal que
f (c1 ; …; cn ) ≤ f ( x1 ; …; xn ) , ∀ ( x1 ; …; xn ) ∈ B (C ; r ) ⊂ Dom ( f )
El número f (c1 ; …; cn ) se llama valor mínimo local o re­
lativo de f.
Punto crítico de una función de varias variables
Sean f una función real con Dom ( f ) ⊂ R n y Q (q1 ; …; qn ) un punto
interior del dominio de f. Se dice que Q es un punto crítico de f si se
cumple una de las siguientes condiciones:
a) Todas las derivadas parciales de primer orden de f en el punto
Q son iguales a cero, es decir
∂f (Q)
∂xi
Q es un punto interior del domi­
nio de f si existe una vecindad
con centro Q y radio r contenida
en el dominio.
= 0, ∀ i = 1, … , n
b) Al menos una de las derivadas parciales de primer orden de f
en el punto Q no existe, esto es
∂f (Q)
no existe para algún i= 1, … , n
∂xi
Observación 2
Sean f una función real con Dom ( f ) ⊂ R n y P0 ∈ Dom ( f ) .
Si f tiene extremo local en P0 y existen las derivadas parciales
de primer orden f x ( P0 ) , i= 1, … , n, entonces
i
f x ( P0 )= 0 , i= 1, … , n
i
Es decir, si f tiene extremo local en P0 , entonces P0 es un punto
crítico de f.
Capítulo 6. Máximos y mínimos de funciones de varias variables
413
Esta observación nos permite buscar los extremos locales de una
función entre los puntos críticos de la función.
Ejemplo 5
Halle los puntos críticos de cada una de las funciones cuyas re­
glas de correspondencia son
a) f ( x; y) = 2x3 + 2 y3 − 9x 2 + 3y 2 − 12 y
b) g ( x; y) =4 + x 2 + 3y 2 + 2x − 6 y + 4
Solución
Como las derivadas parciales
de primer orden de f son funcio­
nes polinómicas, estas funciones
están definidas en todo punto
(x; y) ∈ R 2 . Es decir, las deri­
vadas parciales de la función f
existen en cada punto de R 2 .
Para hallar los puntos críticos de una función se deben deter­
minar los puntos de su dominio en los que todas las derivadas
parciales de primer orden son iguales a cero o alguna de ellas
no exista.
a) El dominio de la función f es Dom ( f ) = R 2 .
Al igualar a cero las derivadas parciales de primer orden
de f, se tiene
f x ( x; y) = 6x 2 − 18x = 0
2
f y ( x; y) = 6 y + 6 y − 12 = 0
Así, al resolver el sistema de ecuaciones, resulta
=
ó x 3
x 0=
2
0
0
6x ( x − 3) =
6x − 18x =
⇔
⇔
y
2
0
0
6 ( y + 2)( y − 1) =
y=
6 y + 6 y − 12 =
−2 ó y =
1
Luego, al combinar los valores de x con los valores de y, los
puntos críticos de f son: A (0; −2) , B (0; 1) , C (3; − 2) y D (3; 1) .
b) El dominio de la función g es
{ ( x; y ) ∈ R 2 / x 2 + 3y 2 + 2 x − 6 y + 4 ≥ 0 }
Dom (=
g)
=
{ ( x; y ) ∈ R
2
2
2
}
/ ( x + 1) + 3 ( y − 1) ≥ 0= R 2
Al igualar a cero las derivadas parciales de primer orden
de g, se tiene
=
gx ( x; y)
g y ( x; y)
=
x +1
= 0
2
(x + 1) + 3 ( y − 1)2
3 ( y − 1)
= 0
( x + 1)2 + 3 ( y − 1)2
Como los valores x = −1, y = 1 anulan a los numeradores
y a los denominadores de gx ( x; y) y g y ( x; y) , el sistema de
414
Cálculo II
ecuaciones no tiene solución. Al calcular las derivadas parcia­
les por definición se obtiene que gx (−1; 1) y g y (−1; 1) no exis­
ten. Luego, el único punto crítico de la función g es el punto
A (−1; 1) ∈ Dom ( g) .
Matriz hessiana
Sea f una función real con Dom ( f ) ⊂ R n tal que todas las derivadas
parciales de segundo orden de f existen en P ∈ Dom ( f ) . La matriz
hessiana de f en el punto P está dada por
( P)
f x x ( P)
2 1
fx x
1 1
H [ f ( P) ] =
fx x
1 2
fx
fx
n x1
2 x2
( P)
( P)
( P)
fx
n x2
fx x
1 n
fx
( P)
2 xn
( P)
( P)
fx
n xn
( P)
Ejemplo 6
Halle la matriz hessiana de cada una de las funciones cuyas re­
glas de correspondencia son
a) f ( x; y) =
x3 − x 2 y 2 + 4 y 3
b) g ( x; y; z) = x3 y + z3 x + y3 z
Solución
a) Las derivadas parciales de primer y segundo orden de f para
cualquier punto ( x; y) ∈ Dom ( f ) =
R 2 son
f x ( x; y) =−
3x 2 2xy 2 ,
f y ( x; y ) =
−2x 2 y + 12 y 2
f xx ( x; y) =
6x − 2 y 2 ,
f xy ( x; y) =
−4xy ,
f yx ( x; y) =
−4xy ,
f yy ( x; y) =
−2x 2 + 24 y
Luego, la matriz hessiana de la función f para cualquier
punto ( x; y) ∈ Dom ( f ) es
f xx ( x; y) f xy ( x; y) 6x − 2 y 2
=
H [ f ( x; y) ] =
f yx ( x; y) f yy ( x; y) − 4 xy
−2 x + 24 y
− 4 xy
2
b) Las derivadas parciales de primer y segundo orden de g para
cualquier punto ( x; y; z) ∈ Dom ( g) =
R3 son
gxx ( x; y ; z) = 6xy
gx ( x; y ; z)= 3x 2 y + z3 ⇔ g xy ( x; y ; z)= 3x 2
2
gxz ( x; y ; z) = 3z
Capítulo 6. Máximos y mínimos de funciones de varias variables
415
g ( x; y; z) = 3x 2
yx
3
2
g y ( x; y ; z) =
x + 3y z ⇒ g yy ( x; y ; z) =
6 yz
2
g yz ( x; y; z) = 3y
gzx ( x; y ; z) = 3z 2
gz ( x; y ; z)= 3z 2 x + y3 ⇒ gzy ( x; y ; z)= 3y 2
gzz ( x; y ; z) = 6zx
Por consiguiente, la matriz hessiana de la función g en
cualquier punto ( x; y; z) ∈ Dom ( g) es
gxx ( x; y ; z) g xy ( x; y ; z) g xz ( x; y ; z)
H [ g ( x; y ; z) ] = g yx ( x; y ; z) g yy ( x; y ; z) g yz ( x; y ; z)
g zx ( x; y ; z) g zy ( x; y ; z) g zz ( x; y ; z)
6 xy 3x 2 3z 2
= 3x 2 6 yz 3y 2
2
3y 2 6zx
3z
Observación 3
La observación 2 establece que si f tiene extremo local en P0 y exis­
ten las derivadas parciales de primer orden f x ( P0 ) , i= 1, … , n,
i
entonces f x ( P0 )= 0 , i= 1, … , n ; es decir; P0 es un punto crítico de f.
i
Sin embargo, no todo punto crítico corresponde necesariamente
a un punto de extremo local.
Z
Por ejemplo, A (0; 0) es un punto crítico de la función
f ( x; y=
) y 2 − x2
0
Y
X
Fig. 6.1.7
pues se verifica=
f x (0; 0) 0=
, f y (0; 0) 0 . Sin embargo, f no pre­
senta un valor máximo ni un valor mínimo relativo en A (0; 0)
(figura 6.1.7).
Este tipo de punto se denomina punto de silla, donde cual­
quier vecindad de A contiene puntos ( x; y) ∈ Dom ( f ) tales que
f (0; 0) ≥ f ( x; y) y otros en los que f (0; 0) ≤ f ( x; y) .
Observación 4
Los menores principales asociados a la matriz hessiana de la fun­
ción f en el punto P0 ∈ Dom ( f ) son
416
Cálculo II
∆1 [ f ( P0 )] , =
f x x ( P0 )
1 1
f x x ( P0 )
1 1
∆ 2 [ f ( P0 )] =
f x x ( P0 )
2 1
f x x ( P0 )
1 1
∆3 [ f ( P0 ) ] =
f x x ( P0 )
f x x ( P0 )
1 2
fx
2 x2
(P0 )
f x x ( P0 )
f x x ( P0 )
fx
fx
1 2
1 3
(P0 )
f x x ( P0 ) f x x ( P0 ) f x x ( P0 )
3 1
3 2
3 3
2 1
2 x2
(P0 )
2 x3
:
:
f x x ( P0 )
1 1
∆n [
f x x ( P0 ) f x x ( P0 )
1 2
f x x ( P0 )
2 1
f ( P0 ) ] =
fx
(P0 )
fx
fx
n x1
1 n
(P0 )
2 x2
fx
n x2
(P0 )
2 xn
(P0 )
fx
n xn
(P0 )
Criterio de las derivadas parciales de segundo orden
para determinar valores extremos relativos de funciones
de varias variables
Teorema 2
Sean f una función real con Dom ( f ) ⊂ R n , P0 un punto crítico
de f donde todas las derivadas parciales de primer orden de f son
iguales a cero y H [ f ( P0 ) ] la matriz hessiana de f en P0 , donde las
derivadas parciales de segundo orden de f son continuas en una
vecindad de P0.
a) Si los menores principales de la matriz hessiana H [ f ( P0 ) ] de
orden impar son negativos y los de orden par son positivos, es
decir, si
∆1 [ f ( P0 ) ] < 0, ∆ 2 [ f ( P0 ) ] > 0, ∆3 [ f ( P0 ) ] < 0, ∆ 4 [ f ( P0 ) ] > 0, … ,
entonces f tiene un máximo local en P0. El número f ( P0 ) es
un valor máximo local o relativo de f.
b) Si todos los menores principales de la matriz hessiana
H [ f ( P0 ) ] son positivos, es decir, si
∆1 [ f ( P0 )] > 0 , ∆ 2 [ f ( P0 )] > 0, ∆3 [ f ( P0 )] > 0, … , ∆ n [ f ( P0 )] > 0
entonces f tiene un mínimo local en P0. El número f ( P0 ) es un
valor mínimo local o relativo de f.
Capítulo 6. Máximos y mínimos de funciones de varias variables
417
c) Si no se cumple ninguna de las condiciones de a) y b) y
∆ n ( P0 ) ≠ 0, entonces se dice que el punto crítico P0 corres­
ponde a un punto de silla y el punto ( P0 ; f ( P0 )) es el punto
de silla de la gráfica de f.
d) Si no se cumple ninguna de las condiciones de a) y b) y
∆ n ( P0 ) =
0, entonces no se puede concluir nada con respecto
al punto crítico P0.
Ejemplo 7
Dada la función f definida por
f ( x; y) = 2x3 + y3 − 3x 2 − 6 y 2 − 12x + 9 y
calcule los valores extremos relativos de f en caso de
que existan.
Solución
El dominio de la función f es Dom ( f ) = R 2 .
Para determinar los puntos críticos de f se igualan a cero las
derivadas parciales de primer orden de f, esto es
f x ( x; y)= 6x 2 − 6x − 12= 0
2
f y ( x; y)= 3y − 12 y + 9= 0
Al resolver el sistema de ecuaciones resulta
−1 ó x =
2
x =
0
6 ( x + 1)( x − 2) =
⇔
y
0
3 ( y − 1)( y − 3) =
y 1=
=
ó
y 3
Como Dom ( f ) = R 2 , al combinar los valores de x con los va­
lores de y, los puntos críticos de f son: A (−1; 1) , B (−1; 3) , C (2; 1)
y D (2; 3) .
Para determinar si los puntos críticos corresponden a un ex­
tremo relativo o punto de silla de la función f, se usa el criterio de
las derivadas parciales de segundo orden (teorema 2).
Así, la matriz hessiana de f es
f xx ( x; y) f xy ( x; y) 12x − 6
=
H [ f ( x; y) ] =
0
f yx ( x; y) f yy ( x; y)
0
6 y − 12
y sus menores principales en cualquier punto ( x; y) ∈ Dom ( f )
son
∆ 1 [ f ( x; y ) ] =
f xx ( x; y) =
12x − 6
∆ 2 [ f ( x; y)]=
418
Cálculo II
f xx ( x; y)
f yx ( x; y)
f xy ( x; y)
f yy ( x; y)
= 36 (2x − 1)( y − 2)
Al evaluar los menores principales en cada uno de los puntos
críticos y aplicar el teorema 2 se tiene la siguiente tabla
Punto
crítico
∆1
∆2
Clasificación según el teorema 2
(−1; 1)
−18
108
f tiene máximo relativo en (−1; 1) .
(−1; 3)
−18
−108
f tiene punto de silla en (−1; 3) .
(2; 1)
18
−108
f tiene punto de silla en (2; 1) .
(2 3)
18
108
f tiene mínimo relativo en (2; 3) .
Por lo tanto, los valores extremos relativos de la función
f son
Valor máximo relativo: f (−1; 1) =
11
Valor mínimo relativo: f (2; 3) = −20
Ejemplo 8
Dada la función f definida por
f ( x; y ; z) =
− x 2 − y 2 − z 2 + xy − yz + 4x + 3y + 2z − 7
calcule los valores extremos relativos de f, en caso de que existan.
Solución
El dominio de la función f es Dom ( f ) = R3 .
Para determinar los puntos críticos de f se igualan a cero las
derivadas parciales de primer orden de f, esto es
f x ( x; y; z) =−2x + y + 4 =0
x =4
f y ( x; y ; z) = x − 2 y − z + 3 = 0 ⇒ y = 4
z = −1
f z ( x; y; z) =− y − 2z + 2 =0
Luego, el único punto crítico de la función f es A (4; 4; −1) .
La matriz hessiana de f en cualquier punto
(x; y; z) ∈ Dom ( f ) es
f xx ( x; y; z)
H [ f ( x; y; z) ] = f yx ( x; y; z)
f zx ( x; y; z)
f xy ( x; y; z)
f yy ( x; y; z)
f zy ( x; y; z)
f xz ( x; y; z)
f yz ( x; y; z)
f zz ( x; y ; z)
−2 1 0
H [ f ( x; y ; z) =
] 1 −2 −1
0 −1 −2
Capítulo 6. Máximos y mínimos de funciones de varias variables
419
y sus menores principales en cualquier punto ( x; y; z) ∈ Dom ( f )
son
∆1 [ f ( x; y ; z) ] ==
f xx ( x; y ; z) − 2
−2 1
∆ 2 [ f ( x; y ; z)] =
=
3
1 −2
∆3 [
−2 1 0
f ( x; y ; z) ] = 1 −2 −1 =
−4
0
−1 −2
Así, los menores principales de la matriz H [ f (4; 4; −1) ] son
∆1 =−2 < 0, ∆ 2 = 3 > 0, ∆3 =− 4 < 0
Por lo tanto, de acuerdo con el teorema 2, f tiene un máxi­
mo local en el punto A (4; 4; −1) y su valor máximo local es
f (4; 4; −1) =
6.
Ejemplo 9
La licorería FEVIMA comercializa piscos de las marcas A y B. El
costo de cada botella de la marca A es de S/ 20, mientras que el de
cada botella de la marca B es de S/ 30. El gerente de FEVIMA esti­
ma que si la botella de la marca A se vende a x soles y la de marca
B a y soles, se venderán cada día aproximadamente 90 − 5x + 4 y
botellas de la marca A y 100 + 6x − 7 y botellas de la marca B.
a) Construya una función que exprese la utilidad diaria en tér­
minos de las variables x e y.
b) ¿Qué precio de venta por botella deberá fijar el gerente
para cada marca con la finalidad de obtener la máxima
utilidad diaria?
Solución
Los datos del problema se muestran en la siguiente tabla:
Marca
de pisco
Costo
por botella
(soles)
Precio
de venta
(soles)
Demanda diaria
(número de botellas)
A
20
x
90 − 5x + 4 y
B
30
y
100 + 6x − 7 y
La utilidad diaria de la licorería FEVIMA por la venta de las
botellas de pisco está dada por
Utilidad = Ingreso – Costo
U=
( x; y ) I ( x; y ) − C ( x; y )
420
Cálculo II
donde, de acuerdo con la tabla
I ( x; y)= x (90 − 5x + 4 y) + y (100 + 6x − 7 y)
C ( x; y=
) 20 (90 − 5x + 4 y) + 30 (100 + 6x − 7 y)
Luego,
U ( x; y ) =
−5x 2 − 7 y 2 + 10xy + 10x + 230 y − 4800
a) Para determinar los precios que maximizan la utilidad se ha­
llan los puntos críticos de U. Así, al igualar a cero las deriva­
das parciales de primer orden de U, se tiene
−10x + 10 y + 10 =
0
U x ( x; y) =
⇔=
x 61, =
y 60
U x; y =
0
) −14 y + 10x + 230 =
y (
Luego, el único punto crítico de la función utilidad
es P (61; 60) .
Para verificar que el punto crítico corresponde a un máxi­
mo relativo de la función U se usa el criterio de las derivadas
parciales de segundo orden (teorema 2).
Así, la matriz hessiana de U y sus menores principales en
cualquier punto ( x; y) son
U xx ( x; y) U xy ( x; y) −10 10
=
H [ U ( x; y) ] =
U yx ( x; y) U yy ( x; y) 10 −14
∆1 [ U ( x; y) ] ==
U xx ( x; y) −10
∆ 2=
[ U ( x; y ) ]
U xx ( x; y) U xy ( x; y)
= 40
U yx ( x; y) U yy ( x; y)
Al evaluar los menores principales en el punto P (61; 60)
se tiene la siguiente tabla:
Punto
crítico
∆1
∆2
(61; 60)
−10
40 U tiene máximo relativo en (61; 60)
Clasificación según el teorema 2
Por lo tanto, para obtener la máxima utilidad los precios de
venta por botella que debe fijar el gerente para las marcas A y B
son S/ 61 y S/ 60 respectivamente.
Capítulo 6. Máximos y mínimos de funciones de varias variables
421
Ejercicios y problemas resueltos 6.1
1.
Utilice el criterio de las segundas derivadas parciales para
determinar los valores extremos relativos y los puntos de silla
de cada una de las siguientes funciones.
3
3
y) 2 ln ( x − 2) ( y + 2) − x 2 − y 2
a) f ( x; =
b) f ( x; y) = ( x − 1)( y − 2) +
c) f ( x;=
y ; z)
1− x 2 − y 2
xe 2
2
4
+
x −1 y − 2
+ z3 − 6 z 2 + 6
Solución
a) Dom ( f=
)
{ ( x; y ) ∈ R
Luego,
–2
3
3
/ ( x − 2) ( y + 2) > 0
}
x−2 > 0 ∧ y + 2 > 0
∨
(x; y) ∈ Dom ( f ) ⇔
x−2<0 ∧ y+2<0
Y
0
2
2
(2; –2)
X
Dom
=
(f)
{ (x; y) ∈ R2 / (x > 2 ∧ y > −2) ∨ (x < 2 ∧ y < −2) }
La gráfica del dominio se muestra en la figura 6.1.8.
Al igualar a cero las derivadas parciales de primer orden
de la función f, se tiene
Fig 6.1.8
−2 ( x − 3)( x + 1)
6
= 0
f x ( x; y)= x − 2 − 2x=
x−2
−2 ( y + 3)( y − 1)
6
f ( x; y=)
− 2 y=
= 0
y
y+2
y+2
De donde
x = 3 ó x = −1
y
y=
−3 ó y =
1
Luego, al combinar los valores de x con los valores de y,
se tiene
A (3; − 3) ∉ Dom ( f ) , B (3; 1) ∈ Dom ( f ) , C (−1; −3) ∈ Dom ( f )
y D (−1; 1) ∉ Dom ( f ) .
Así, los puntos críticos de f son B (3; 1) y C (−1; −3) .
422
Cálculo II
La matriz hessiana de f y sus menores principales en
cualquier punto ( x; y) ∈ Dom ( f ) son
−6
−2
f xx ( x; y) f xy ( x; y) ( x − 2)2
=
H [ f ( x; y) ] =
f yx ( x; y) f yy ( x; y)
0
∆1 [ f ( x; y)] =f xx ( x; y) =
−6
f xx ( x; y)
∆ 2 [ f ( x; y ) ] =
f yx ( x; y)
f xy ( x; y)
(x − 2)2
0
−6
( y + 2)2
− 2
−2
f yy ( x; y)
−6
− 6
2
2
=
−
−
( x − 2)2
( y + 2)2
Al evaluar los menores principales en cada uno de los
puntos críticos y aplicar el teorema 2, resulta la siguiente
tabla:
Punto crítico
∆1
∆ 2 Clasificación según el teorema 2
B (3; 1)
−8
64
3
f tiene máximo relativo en (3; 1)
C (−1; − 3)
−8
3
64
3
f tiene máximo relativo en (−1; −3)
Por consiguiente, al evaluar f en los puntos
B (3; 1) y C (−1; −3) el valor máximo relativo de f es
f (3; 1) = 6 ln 3 − 10 = f (−1; −3)
b) f ( x; y) = ( x − 1)( y − 2) +
Dom (=
f)
2
4
+
x −1 y − 2
{( x; y ) ∈ R
2
/
}
x ≠1 ∧ y ≠ 2
Al igualar a cero las derivadas parciales de primer orden
de la función f, se tiene
( y − 2)(x − 1)2 − 2
2
f x ( x; y ) = y − 2 −
=
=0
(x − 1)2
(x − 1)2
(x − 1)( y − 2)2 − 4
4
f
x
;
y
=
x
−
1
−
=
= 0
(
)
y
( y − 2)2
( y − 2)2
Al resolver el sistema de ecuaciones se obtiene el único
punto crítico A (2; 4) .
Capítulo 6. Máximos y mínimos de funciones de varias variables
423
La matriz hessiana de f y sus menores principales en
cualquier punto (x; y) Dom( f ) es
4
f xx ( x; y) f xy ( x; y) ( x − 1)3
=
H [ f ( x; y) ] =
f yx ( x; y) f yy ( x; y) 1
8
( y − 2)3
1
4
∆1 [ f ( x; y) ] = f xx ( x; y) =
(x − 1)3
f xx ( x; y)
∆ 2 [=
f ( x; y)]
f yx ( x; y)
f xy ( x; y) 4 8
−1
=
f yy ( x; y) ( x − 1)3 ( y − 2)3
Al evaluar los menores principales en el punto crítico
A (2; 4) y aplicar el teorema 2, resulta la siguiente tabla:
Punto crítico
∆1
∆ 2 Clasificación según el teorema 2
A (2; 4)
4
3
f tiene mínimo relativo en (2; 4)
Por consiguiente, el valor mínimo relativo de f es
f (2; 4) = 6
c) f ( x;=
y ; z)
1− x 2 − y 2
xe 2
+ z3 − 6 z 2 + 6
Dom ( f ) = R3
Al igualar a cero las derivadas parciales de primer orden
de la función f, se tiene
1− x 2 − y 2
1∨ x=
−1
x=
f ( x;=
y ; z) e 2
1−
=
x2 0
x
∧
1− x 2 − y 2
⇔ x = 0 ∨ y = 0
f y ( x; y ; z) =
− xy e 2
=
0
∧
2
f ( x; y;=
z) 3z − 12 z = 0
z
z = 0 ∨ z = 4
(
)
Luego, al combinar adecuadamente los valores de x, y, y
z se obtienen los puntos críticos
P0 (1; 0; 0) , P1 (1; 0; 4) , P2 (−1; 0; 0) , P3 (−1; 0; 4)
La matriz hessiana de f para cada punto
(x; y; z) ∈ Dom ( f ) es
424
Cálculo II
f xx ( x; y; z)
H [ f ( x; y; z)] = f yx ( x; y; z)
f zx ( x; y; z)
f xy ( x; y; z)
f yy ( x; y; z)
f zy ( x; y; z)
1− x 2 − y 2
2
x x −3 e 2
=
1− x 2 − y 2
y x2 − 1 e 2
0
(
)
(
)
f xz ( x; y ; z)
f yz ( x; y ; z)
f zz ( x; y; z)
(
2
(
2
)
1− x 2 − y 2
e 2
)
1− x 2 − y 2
e 2
y x −1
x y −1
0
0
6z − 12
0
Al evaluar la matriz hessiana de f en cada uno de los
puntos críticos, se tiene
0
−2 0
2 0 0
0 1 0
H [ f (1; 0; 0) ] =
0 −1 0 ; H [ f (−1; 0; 0) ] =
0 0 −12
0 0 −12
−2 0 0
0 −1 0 ;
H [ f (1; 0; 4) ] =
0 0 12
2 0 0
0 1 0
H [ f (−1; 0; 4) ] =
0 0 12
Al calcular los menores principales de cada matriz
hessiana y aplicar el teorema 2, resulta la siguiente tabla:
Punto crítico
∆1 ∆ 2
∆3
P0 (1; 0; 0)
−2
2
−24 f tiene máximo local en (1; 0; 0)
P1 (1; 0; 4)
−2
2
24
P2 (−1; 0; 0)
2
2
−24 f tiene punto silla en (−1; 0; 0)
P3 (−1; 0; 4)
2
2
24
Clasificación según el teorema 2
f tiene punto silla en (1; 0; 4)
f tiene mínimo local en (−1; 0; 4)
Por lo tanto, los valores máximo y mínimo locales de la
función f son respectivamente
f (1; 0; 0) =
7 y f (−1; 0; 4) =
−27
2.
Calcule las dimensiones de la caja rectangular de capacidad
máxima, si tres de sus caras coinciden con los planos coordenados y tiene un vértice en el primer octante en el plano
x
4
y
6
P : + +
z
1
=
12
Capítulo 6. Máximos y mínimos de funciones de varias variables
425
Solución
Sea Q ( x; y ; z) el vértice de la caja en el primer octante que está
en el plano P , donde x e y son las dimensiones de la base de la
caja y z su altura (figura 6.1.9). Luego, la capacidad V de la caja
está dada por
V = xyz
Z
12
Como Q ( x; y ; z) pertenece al plano P , al despejar la va­ria­
ble z en la ecuación del plano se obtiene
z = 12 − 3x − 2 y
Q(x; y; z)
0
y
X
z
x
4
Fig. 6.1.9
6
Y
Al reemplazar z en la fórmula del volumen resulta
V ( x; y ) =
xy (12 − 3x − 2 y) =
−3x 2 y − 2xy 2 + 12xy
Para determinar las dimensiones de la caja de máximo
volumen se hallan los puntos críticos igualando a cero las
derivadas parciales de primer orden de la función volumen,
esto es
−6xy − 2 y 2 + 12 y =
0
0
−2 y (3x + y − 6) =
Vx ( x; y) =
⇔
2
0
−3x − 4 xy + 12 x =
0
− x (3x + 4 y − 12) =
Vy ( x; y) =
Dado que las longitudes x e y deben ser positivas, se
descartan las soluciones donde x = 0 ∨ y = 0. Así, el último
sistema de ecuaciones es equivalente a
y−6 0 =
3x +=
x 4 / 3
⇔
y − 12 0 =
3x + 4=
y 2
de donde el único punto crítico es P0 (4/ 3; 2) .
La matriz hessiana de V en cualquier punto
(x; y) ∈ Dom (V ) es
∂ 2V ∂ 2V
2
∂y∂x
− 6y
− 6x − 4 y + 12
∂x
=
H [V ( x; y)] =
∂ 2 V ∂ 2 V − 6x − 4 y + 12
− 4x
2
∂
∂
x
y
∂y
Así, al evaluar la matriz hessiana en el punto crítico
P0 (4 / 3; 2) , resulta
4
H V ;
3
−12 − 4
2 =
16 , ∆1 =−12 < 0, ∆ 2 =48 > 0
− 4 −
3
Por lo tanto, la caja de capacidad máxima tiene base rec­
tangular cuyas dimensiones son 4 / 3uu de ancho, 2uu de largo
y 4uu de altura.
426
Cálculo II
3.
Se desea construir una caja rectangular cerrada cuya capaci­
dad sea 54 cm3. Se utilizarán tres materiales diferentes en la
construcción. El material para los lados cuesta S/ 2 el centí­
metro cuadrado; el material para la parte inferior cuesta S/ 5 el
centímetro cuadrado y el material para la parte superior cuesta
S/ 3 el centímetro cuadrado. ¿Cuáles son las dimensiones de la
caja que minimiza el costo de los materiales?
Solución
Si las dimensiones de la caja son x, y y z (figura 6.1.10), el costo
de los materiales para construir la caja es
C = 2xz (2) + 2 yz (2) + xy (5) + xy (3) = 4xz + 4 yz + 8xy
z
Además, como la capacidad de la caja es 54 cm3, se tiene
V = xyz = 54
⇒
z=
54
xy
y
Luego, al reemplazar z = 54 /xy en la expresión del costo,
resulta
x
Fig. 6.1.10
54
54
216 216
C ( x; y) = 4x + 4 y + 8xy =
+
+ 8xy
y
x
xy
xy
Para determinar las dimensiones de la caja de menor costo
se hallan los puntos críticos al igualar a cero las derivadas
parciales de primer orden de la función costo C, esto es
216
0
− 2 + 8y =
C x ( x; y) =
x
216
C y ( x; y) =
0
− 2 + 8x =
y
Al resolver el sistema se obtiene el único punto crítico
P0 (3; 3) .
La
matriz
(x; y) ∈ Dom (C )
hessiana
es
de
C
para
∂ 2C ( x ; y ) ∂ 2C ( x ; y )
2
∂y∂x
∂x
H [C ( x; y)] =
=
2
2
∂ C ( x; y ) ∂ C ( x; y )
∂y 2
∂x∂y
cualquier
432
3
x
8
punto
8
432
y3
Así, al evaluar la matriz hessiana en el punto crítico P0 (3; 3) ,
resulta
16 8
H [ f (3; 3)]=
, ∆1 = 16 > 0, ∆ 2 = 192 > 0
8 16
Capítulo 6. Máximos y mínimos de funciones de varias variables
427
Por lo tanto, la caja de menor costo tiene una base cuadrada
de 3 cm de lado y una altura de 6 cm.
4.
En el distrito de Sancos, departamento de Ayacucho, se insta­
lará un ducto para trasladar gas natural desde el punto A hasta
el punto B (figura 6.1.11). Por la desigual composición del sue­
lo, el terreno se ha dividido mediante paralelas en tres zonas
Z1 , Z2 y Z3 . Esta es la razón por la que instalar el ducto en
cada zona tiene diferente precio. Así, instalar un kilómetro de
tubería en la zona Z1 cuesta $ 6000; en la zona Z2 , $ 4000, y la
tubería instalada en la frontera entre las zonas Z2 y Z3 cuesta
$1000 dólares el kilómetro.
A
35 km
Zona z1
P
x
Zona z2
2 15 km
Q
y
B
Zona z3
20 km
Fig. 6.1.11
a) Exprese el costo total de instalación del ducto entre los pun­
tos A y B en términos de las variables x e y.
b) Determine los valores de x e y que minimizan el costo total
de instalación del ducto entre los puntos A y B.
Solución
a) El costo total de la instalación del ducto entre los puntos
A y B es la suma de los costos de instalación de cada
tramo, esto es
C ( x; y) = (6000) d ( A; P) + (4000) d ( P ; Q) + (1000) d (Q; B)
=
(6000)
x 2 + 35 + (4000) y 2 + 60 + (1000)(20 − x − y)
donde x ≥ 0, y ≥ 0 , x + y ≤ 20.
b) Para determinar los valores de x e y que minimizan el costo
de instalación se hallan los puntos críticos igualando a cero
las derivadas parciales de primer orden de la función costo,
es decir
428
Cálculo II
y)
C x ( x; =
C y ( x;=
y)
6000x
x 2 + 35
4000 y
y 2 + 60
− 1000
= 0
− 1000
= 0
Al resolver el sistema se obtiene el único punto crítico
P0 (1; 2)
La matriz hessiana de C para cualquier punto
x
;
( y) ∈ Dom (C ) es
210 000
2
3/ 2
C xx ( x; y) C xy ( x; y) x + 35
=
H [C ( x; y)] =
C yx ( x; y) C yy ( x; y)
0
(
240 000
3/ 2
y 2 + 60
0
)
(
)
Así, al evaluar en el punto crítico P0 (1; 2) , resulta
8750
H [C (1; 2)] = 9
0
=
∆1
0
1875
4
2 734 375
8750
> 0, =
∆2
>0
9
6
Por lo tanto, los valores de x e y que minimizan el costo
km, y 2 km.
total de instalación=
son x 1=
Ejercicios y problemas propuestos 6.1
d) i ( x; y) = x3 y3 e − x
3
− y3
e) j ( x; y ; z) = 4 x 2 y + 5yz 2 + 4x 2 − 5y + 6
1.
Utilice el criterio de las segundas derivadas
parciales para determinar los valores extre­
mos relativos y los puntos de silla de cada
una de las siguientes funciones.
a) f ( x; y) = 2x5 − 3y5 − 160 x + 1215 y + 31
(
b) g ( x; =
y) ln x 2 + y 2 − 2x + 2 y + 2 + e 4
c) h ( x; y) = xye
−
x2 + y 2
2
)
f) k ( x; y; z) =x − 2 y + ln x 2 + y 2 +
y
+ 3arctan + 4z3 − 6z 2 + 6
x
2.
Se va a construir una caja rectangular cerra­
da de tal manera que su capacidad sea de
96 cm3. Los costos del material de la tapa y
de la base son de S/ 2 y S/ 4 por cm2 respec­
tivamente. El costo del material de las partes
Capítulo 6. Máximos y mínimos de funciones de varias variables
429
número de minutos que contrata en la radio,
su ingreso por ventas (en miles de dólares) es
laterales de la caja es de S/ 2 por cm2. Deter­
mine una función que exprese el costo de los
materiales utilizados en la construcción de
la caja en términos de las dimensiones x e y
de la base de la caja. Halle las dimensiones
de la caja de costo mínimo.
3.
Un comerciante del centro comercial Gama­
rra vende dos tipos de polos a p1 y p2 soles
cada unidad y las demandas semanales co­
rrespondientes son
I (=
x; y ) –2x 2 – y 2 + xy + 4x + 6 y + 90
¿Cuántos minutos de publicidad debe con­
tratar en radio y cuántos en televisión para
maximizar su ingreso por ventas?
7.
x = 300 − 4 p1 − 2 p2 ; y = 400 − 2 p1 − 6 p2
expresadas en cientos de unidades. Calcule
los precios unitarios de venta para que el in­
greso del comerciante sea máximo.
4.
Se desea construir una caja rectangular de
cartón sin tapa de 12 metros cuadrados de
superficie. Halle las dimensiones de la caja
de máxima capacidad.
5.
Determine el máximo volumen de un para­
lelepípedo rectangular que tiene tres caras
sobre los planos coordenados y un vértice en
el primer octante en el plano
x
a
y
b
z
c
P : + + = 1, a > 0, b > 0, c > 0
6.
430
Una empresa planea gastar $ 10 000 en pu­
blicidad en radio y televisión. Se sabe que el
minuto de publicidad en la televisión cuesta
$ 3000, mientras que en radio cuesta $ 1000
dólares. Si x es el número de minutos de pu­
blicidad que contrata en la televisión e y el
Cálculo II
La empresa agroindustrial VIFEMA, S.A.
cultiva y empaca espárrago de exportación
en las ciudades de Ica y Trujillo. Los costos
de producción y embarque (en dólares) en
dichas ciudades son respectivamente:
C I ( x) = 10x 2 − 80x + 90
CT=
( y) 50 y 2 + 10
donde x e y son el número de toneladas pro­
ducidas en cada ciudad.
El precio de venta de exportación para el
producto es de $ 1000 por tonelada. Halle las
cantidades que se deben producir en cada
ciudad para obtener la máxima ganancia.
8.
El gerente de la empresa DELFIN, S.A. que
planea vender un nuevo producto al precio
de S/ 200 por unidad estima que si se gas­
ta x miles de soles en publicidad e y miles
de soles en el desarrollo del producto, los
2000 y 1000 x
unidades
+
y+3
x+6
del producto. Si el costo de fabricación de
cada unidad del producto es de S/ 176, ¿cuán­
to debe invertir la empresa en publicidad y
cuánto en el desarrollo del producto para
generar la máxima utilidad posible?
clientes comprarán
6.2Máximos y mínimos condicionados
En la sección anterior, cuando se trataba de optimizar una función
objetivo sujeta a una restricción, a partir de esta se despejaba una
variable y se reemplazaba en la función objetivo para así obtener los
valores extremos de esta nueva función. En esta sección se presen­
tará otro método que permite calcular los valores extremos de una
función objetivo, considerando una o más restricciones dadas.
Valores extremos condicionados
Sean f , g1 , g2 , … , gk , funciones reales con dominios contenidos
en R n , k < n, y sea D el conjunto de puntos ( x1 ; x2 ; …; xn ) del
dominio de f que verifican el sistema de ecuaciones
0
g1 ( x1 ; x2 ; …; xn ) =
0, k < n
g2 ( x1 ; x2 ; …; xn ) =
g x ; x ; …; x =
k( 1 2
n) 0
Cada ecuación gi ( x1 ; x2 ; …; xn ) =
0 , para i= 1, … , k , se llama
una restricción de la función objetivo f, y D es el conjunto de puntos
del dominio de f que satisfacen todas las k restricciones. Por esta
razón, a D se le denomina conjunto de puntos factibles. Bajo estas
condiciones se dice que:
Y
a) La función f tiene un valor máximo condicionado
en P0 ∈ D, si
D r
f ( P0 ) ≥ f (Q) , para todo Q ∈ D
El número f ( P0 ) es un valor máximo condicionado de f.
b) La función f tiene un valor mínimo condicionado
en P0 ∈ D , si
P0
0
X
Fig. 6.2.1
f ( P0 ) ≤ f (Q) , para todo Q ∈ D
El número f ( P0 ) es un valor mínimo condicionado de f.
En general se trata de buscar entre los puntos del dominio
de f que cumplen todas las restricciones, es decir entre los puntos
factibles, aquellos en los que la función f toma su valor máximo o
mínimo. Si a) y b) se dan para una vecindad de P0 en D (figura 6.2.1),
los extremos condicionados son relativos o locales.
Un método para resolver este problema se debe al matemático
Joseph Louis Lagrange (1736-1813).
Capítulo 6. Máximos y mínimos de funciones de varias variables
431
Función de Lagrange
Sean f , g1 , g2 , … , gk , funciones reales con dominios conte­
nidos en R n . Se denomina función de Lagrange de f sujeta a las
restricciones
0
g1 ( x1 ; x2 ; …; xn ) =
0, k < n
g2 ( x1 ; x2 ; …; xn ) =
g x ; x ; …; x =
(
k 1 2
n) 0
a la función real L con Dom ( L) ⊂ R n+ k cuya regla de corresponden­
cia está dada por
L ( x1 ; …; xn ; λ1 ; …; =
λ k ) f ( x1 ; …; xn ) + λ1 g1 ( x1 ; …; xn ) + … + λ k g k ( x1 ; …; xn )
Los números reales λ1 ; λ 2 ; …; λ k se llaman multiplicadores de
Lagrange.
Note que la función L tiene n + k variables independientes,
las n variables de f y las k variables λ i , una por cada restricción,
=
i 1, … , k.
Cualquier punto del dominio de la función L se escribe como
P (Q; Λ) , donde Q ( x1 ; x2 ; …; xn ) ∈ R n y Λ (λ1 ; λ 2 ; …; λ k ) ∈ R k .
Además, si Q es un punto factible, es decir, un punto del dominio
de f que cumple todas las restricciones, entonces
k
L (=
P) L (Q; =
Λ) f (Q) , para cualquier Λ ∈ R
Lagrange demostró que los máximos o mínimos condicionados
de la función f ocurren necesariamente en los puntos críticos de la
función L y estableció un criterio que permite decidir si correspon­
den a un máximo o mínimo condicionado de f.
Ejemplo 1
Sea f la función cuya regla de correspondencia es
f ( x; y ) = x + y + 4 ,
Construya la función de Lagrange de f sujeta a la restricción
x2 + y 2 =
8
y determine sus puntos críticos.
Solución
La función de Lagrange de la función f, sujeta a la restricción
g ( x; y) = x 2 + y 2 − 8 = 0, es
(
)
L ( x; y ; λ ) = f ( x; y ) + λg ( x; y ) = x + y + 4 + λ x 2 + y 2 − 8
432
Cálculo II
Para determinar los puntos críticos de la función L se igualan
a cero sus derivadas parciales de primer orden, es decir
L ( x ; y ; λ ) = 1 + 2λ x = 0
x
Ly ( x; y; λ) = 1 + 2λy = 0
2
2
Lλ ( x; y; λ)= x + y − 8= 0
−1
=
λ 2x , x ≠ 0 … (1)
−1
⇔ λ =
, y ≠ 0 … ( 2)
2y
x 2 + y 2 − 8 = 0 … (3)
Al igualar (1) y (2), se tiene
−1 −1
=
2x 2 y
y =x … ( 4)
⇒
Al sustituir (4) en (3), resulta
x 2 + x 2 − 8 =0 ⇔
x =±2
Luego, al reemplazar x = ±2 en las ecuaciones (4) y (1), los
puntos críticos de la función L son
P0 (2; 2; −1/ 4) y P1 (−2; − 2; 1/ 4)
Las dos primeras componentes de los puntos críticos corres­
ponden a las variables x e y, mientras que la tercera componente
corresponde a la variable λ.
Para determinar cuáles de los puntos críticos corresponden a
un máximo o mínimo condicionado se requiere el concepto de
matriz hessiana orlada que se presenta a continuación.
Matriz hessiana orlada (con una sola restricción)
Sean f y g funciones con dominios contenidos en R n ,
=
D
{ (x1 ;
x2 ; …; xn ) ∈ Dom ( f ) / g ( x1 ; x2 ; …; x=
n ) 0 } el conjunto de
puntos factibles y L la función de Lagrange de f sujeta a la restric­
ción g ( x1 ; x2 ; …; xn ) =
0.
Si ( x1 ; x2 ; …; xn ) ∈ D es un punto donde todas las derivadas par­
ciales de segundo orden de f y g existen y son continuas, la matriz
hessiana orlada de L en el punto P ( x1 ; x2 ; …; xn ; λ) es la matriz de
orden (n + 1) × (n + 1) dada por
0
g x ( P)
1
g x ( P)
2
gx ( P) ... gx ( P)
3
n
gx ( P) Lx x ( P) Lx x ( P) Lx x ( P) ... Lx x ( P)
1
1 1
1 2
1 3
1 n
3
3 1
3 2
3 3
3 n
gx ( P) Lx x ( P) Lx x ( P) Lx x ( P) ... Lx x ( P)
2
2 1
2 2
2 3
2 n
Η [L ( P)] =
g x ( P) Lx x ( P) Lx x ( P) Lx x ( P) ... Lx x ( P)
g x ( P) Lx
n
n x1
( P)
Lx
n x2
( P)
Lx
n x3
(P) ...
Lx
n xn
( P)
Capítulo 6. Máximos y mínimos de funciones de varias variables
433
Observación 5
Los menores principales asociados a la matriz hessiana orlada de la
función L en el punto P0 (Q0 ; λ 0 ) , donde Q0 ∈ D, son
0
gx ( P0 )
1
∆ 2 [L ( P0 )] =
gx ( P0 ) Lx x ( P0 )
1
1 1
0
∆3 [L ( P0 )] =
gx ( P0 )
1
gx ( P0 )
1
Lx x ( P0 )
1 1
gx ( P0 ) Lx
.
.
.
2
2 x1
( P0 )
.
.
.
0
gx1 ( P0 )
gx ( P0 )
2
Lx x ( P0 )
1 2
Lx
2 x2
( P0 )
gx ( P0 )
gx ( P0 ) gx3 ( P0 ) gx ( P0 )
Lx x ( P0 )
Lx x ( P0 ) Lx x ( P0 ) Lx x ( P0 )
1
n
2
1 2
1 3
1 n
3 1
3 2
3 3
3 n
1 1
gx ( P0 ) Lx x ( P0 ) Lx x ( P0 ) Lx x ( P0 ) Lx x ( P0 )
2
2 1
2 2
2 3
2 n
∆ n+1 [L ( P0 )] =
gx ( P0 ) Lx x ( P0 ) Lx x ( P0 ) Lx x ( P0 ) Lx x ( P0 )
3
gx ( P0 ) Lx
n
n x1
(P0 )
Lx
n x2
(P0 ) Lxnx3 (P0 )
Lx
n xn
(P0 )
Note que, ∆ 2 [L ( P0 )] siempre es negativo para gx ( P0 ) ≠ 0.
1
Teorema 3. Criterio de las derivadas parciales de segundo
orden para determinar valores extremos locales de funciones
de varias variables condicionados a una restricción
Sean f y g funciones reales con dominios contenidos en R n ,
=
D { ( x1 ; x2 ; …; xn ) ∈ Dom ( f ) / g ( x1 ; x2 ; …; =
xn ) 0 } el conjunto de
puntos factibles y L la función de Lagrange de f sujeta a la restric­
ción g ( x1 ; x2 ; …; xn ) =
0.
Si P0 (Q0 ; λ 0 ) es un punto crítico de L, donde Q0 ∈ D, y H [L ( P0 )]
es la matriz hessiana orlada de L en P0 , se tiene
a) Si ∆3 [L ( P0 )] < 0, ..., ∆ n+1 [L ( P0 )] < 0, entonces f (Q0 ) es un
valor mínimo local condicionado de f.
b) Si los menores principales de la matriz hessiana orlada de
orden impar son positivos (a partir de ∆3 ) y los de orden
par son negativos (a partir de ∆ 4 ); es decir, si
∆3 [L ( P0 )] > 0, ∆ 4 [L ( P0 )] < 0, ∆5 [L ( P0 )] > 0, ∆ 6 [L ( P0 )] < 0, …
entonces f (Q0 ) es un valor máximo local condicionado de f.
434
Cálculo II
c) Si todos los menores principales son distintos de cero pero
no verifican las condiciones a) y b), entonces el punto Q 0
corresponde a un punto de silla condicionado de f.
d) Si no se verifica ninguna de las condiciones a), b) y c), el cri­
terio no concluye nada.
Ejemplo 2
Determine los valores máximo y mínimo de la función dada por
f ( x; y=
) x3 + 2 x 2 y
sujeta a la restricción
g ( x; y ) = x + y − 3 = 0
Solución
La función de Lagrange de f sujeta a la restricción dada es
L ( x; y ; λ=
) f (x; y) + λg (x; y=) x3 + 2x2 y + λ (x + y − 3)
Para determinar los puntos críticos de L se igualan a cero sus
derivadas parciales de primer orden, esto es
Lx ( x; y; =
λ) 3x 2 + 4xy +=
λ 0 ...(1)
2
...( 2)
Ly ( x; y; λ=
) 2x + λ =0
...(3)
Lλ ( x; y; λ) = x + y − 3 = 0
Al restar la ecuación (2) de la ecuación (1) se tiene
x 2 + 4 xy = 0 ⇔ x ( x + 4 y) = 0 ⇔ x = 0 ∨ y = −
x
4
Al resolver las ecuaciones (3) y (2) para x = 0 se obtiene el
x
se obtiene P1 (4; −1; −32) .
4
La matriz hessiana orlada de la función L es
punto crítico P0 (0; 3; 0) y para y = −
0
g x ( x; y )
g y ( x; y )
=
H [L ( x; y ; λ)] gx ( x; y) Lxx ( x; y ; λ) Lxy ( x; y ; λ)
g y ( x; y) Lyx ( x; y; λ) Lyy ( x; y; λ)
1
1
0
= 1 6x + 4 y 4x
1
4x
0
Al evaluar esta matriz en el punto crítico P0 (0; 3; 0) , resulta
Capítulo 6. Máximos y mínimos de funciones de varias variables
435
0 1 1
H [L (0; 3; 0)] = 1 12 0
1 0 0
y el menor principal ∆3 [L (0; 3; 0)] asociado a esta matriz es
0
1
1
∆3 [L (0; 3; 0)] =1 12 0 =
−12 < 0
1 0 0
Luego, el punto Q0 (0; 3) , componente del punto crítico P0 ,
corresponde a un mínimo condicionado de f y el valor mínimo
condicionado es f (0; 3) = 0.
De manera similar, al evaluar la matriz hessiana orlada en el
punto crítico P1 (4; −1; −32) , se obtiene
0 1 1
1 20 16
H [L (4; −1; −32)] =
1 16 0
y el menor principal ∆3 [L (4; −1; −32)] asociado a esta matriz es
0 1 1
∆3 [L (4; −1; −32)] = 1 20 16 = 12 > 0
1 16 0
Por consiguiente, el punto Q1 (4; −1) , componente del punto
crítico P1 , corresponde a un máximo condicionado de f y el valor
máximo condicionado es f (4; −1) =
32.
Ejemplo 3
Con un cartón de forma rectangular que tiene un área de
108 cm2, se construye una caja rectangular sin tapa. Calcule su
capacidad máxima.
Solución
z
x
Fig. 6.2.2
y
La capacidad de la caja rectangular cuyas dimensiones son x cm
e y cm en la base y z cm de altura (figura 6.2.2) es
=
V f=
(x; y; z) xyz
y la restricción es
xy + 2 xz + 2 yz =
108
⇔ g ( x; y ; z) =xy + 2 xz + 2 yz − 108 =0
436
Cálculo II
La función de Lagrange de f sujeta a la restricción dada es
L ( x; y ; z ; =
λ) xyz + λ ( xy + 2 xz + 2 yz − 108)
Para determinar los puntos críticos de L, se igualan a cero sus
derivadas parciales de primer orden, es decir
Lx ( x;
Ly ( x;
Lz ( x;
Lλ ( x;
y; z; λ=
) yz + λy + 2λz= 0
... (1)
y; z; λ) = xz + λx + 2λz = 0
... ( 2)
y; z; λ)= xy + 2λx + 2λy = 0
... (3)
y; z; λ)= xy + 2xz + 2 yz − 108 =
0 ... ( 4)
Al restar la ecuación (2) de la ecuación (1) se obtiene
yz − xz + λy − λx = 0 ⇔ ( y − x)( z + λ) = 0 ⇔ y = x ∨ z = − λ
De manera similar, al multiplicar la ecuación (3) por z y la
ecuación (1) por x y restar estos resultados, se obtiene
2λyz − λxy= 0 ⇔ λy (2z − x)= 0 ⇔ y= 0 ∨ z=
Luego, al sustituir
=
y x=
, z
∨ λ= 0
x
en la ecuación (4), se tiene
2
x
x
x ( x) + 2 x + 2 ( x) − 108 =
0 ⇔ x2 =
36 ⇔ x =
±6
2
2
Como x > 0 , y > 0 ∧ z > 0, las opciones λ = 0 y z = −λ se des­
cartan. Luego, el único punto crítico de interés para el problema
es P0 (6; 6; 3; −3/ 2) .
La matriz hessiana orlada de la función L en el punto
P ( x; y ; z; λ) es
g x ( P) g y ( P) g z ( P)
0
gx ( P) Lxx ( P) Lxy ( P) Lxz ( P)
H [L ( P)] =
g y ( P) Lyx ( P) Lyy ( P) Lyz ( P)
g ( P) L ( P) L ( P) L ( P)
zx
zy
zz
z
0
y + 2z x + 2z 2x + 2 y
y + 2z
0
z+λ
y + 2λ
=
x + 2z
z+λ
0
x + 2λ
0
2x + 2 y y + 2λ x + 2λ
Al evaluar esta matriz en el punto crítico P0 (6; 6; 3; −3/ 2)
resulta
12 24
0 12
12
0
3 / 2 3
H [L ( P0 )] =
12 3 / 2
0
3
3
3
0
24
Capítulo 6. Máximos y mínimos de funciones de varias variables
437
Los menores principales (a partir de ∆3 ) asociados a esta
matriz son
0
12
12
0
12
12
∆3 [L ( P0 )] =
12
0
3/ 2 =
432 > 0
12 3 / 2
0
12
0
3/ 2
∆ 4 [L ( P0 )] =
12 3 / 2
0
24
3
3
24
3
=
−3888 < 0
3
0
Por lo tanto, el punto Q0 (6; 6; 3) , componente del punto crí­
tico P0 , corresponde a un máximo condicionado. Luego, la capa­
cidad máxima de la caja rectangular es
=
V
(6=
)(6)(3)
108 cm 3
Observación 6
Si el conjunto de puntos factibles es acotado y cerrado y f es con­
tinua en dicho conjunto, entonces f posee necesariamente valores
máximo y mínimo absolutos condicionados. Estos valores ocurren
en los puntos críticos de la función de Lagrange. Por ello, para su de­
terminación no se requiere de la matriz hessiana orlada, solo basta
encontrar los puntos críticos y evaluar la función en dichos puntos.
La mayor imagen hallada será el valor máximo condicionado y la
menor, el valor mínimo condicionado.
Ejemplo 4
Sea f la función cuya regla de correspondencia es
f ( x; y ) = x + y + 4 ,
Verifique gráficamente que el conjunto D de puntos factibles
es cerrado y acotado, y que la función f es continua. Luego apli­
que la observación 6 para determinar los valores extremos con­
dicionados de f sujeta a la restricción
x2 + y 2 =
8
Solución
El conjunto D de puntos factibles tiene como elementos a los pa­
8.
R 2 que cumplen la restricción x 2 + y 2 =
res ( x; y) ∈ Dom ( f ) =
Este conjunto D corresponde a una circunferencia, por lo cual
es un conjunto cerrado y acotado. Además, como la función f es
polinómica, también es continua en dicho conjunto. Luego, se
438
Cálculo II
puede aplicar la observación 6. Así, la función de Lagrange de la
función f, sujeta a la restricción g ( x; y) = x 2 + y 2 − 8 = 0, es
(
)
L ( x; y ; λ ) = f ( x; y ) + λg ( x; y ) = x + y + 4 + λ x 2 + y 2 − 8
𝑋𝑋
𝑌𝑌
Z
S2 : x 2 + y 2 = 8 ,
Los puntos críticos de L son P0 (2; 2; −1/ 4) y P1 (−2; −2; 1/ 4) .
(ejemplo 1).
S1 : z = x + y + 4,
Las dos primeras componentes corresponden a x e y, y confor­
man los puntos Q0 (2; 2) y Q1 (−2; − 2) , factibles del dominio de f.
Al evaluar la función f en los puntos Q0 (2; 2) y Q1 (−2; − 2) ,
se tiene
f (2; 2) = 12 y
X
0
Y
Fig 6.2.3
f (−2; − 2) =
0
Por consiguiente, los valores máximo y mínimo absolutos con­
dicionados de f son respectivamente f (2; 2) = 12 y f (−2; −2) =
0.
Geométricamente, en el espacio R3 la gráfica de la función f es
un plano S1 : z = x + y + 4, mientras que la gráfica de la restricción
8, y la intersección de ambas
es el cilindro circular S2 : x 2 + y 2 =
superficies es una elipse que representa los puntos de la gráfica
de la función que cumplen la restricción (figura 6.2.3). Esto signi­
fica que el punto de la elipse de mayor cota es A (2; 2; 12) y el de
menor cota es el punto B (−2; −2; 0) (figura 6.2.4).
Z
Punto
más alto
A
A (2; 2; 12)
Elipse
X
B Punto
más bajo
0
Y
B (−2; −2; 0)
𝑍𝑍
Fig 6.2.4
Ejercicios y problemas resueltos 6.2
1.
Calcule los valores máximo y mínimo de la función dada por
f ( x; y=
) 2x + 4 y
sujeta a la restricción
x2 y 2
1.
+
=
9
4
Solución
La función de Lagrange L de la función f está dada por
𝑨𝑨
𝑋𝑋
𝑌𝑌
𝑩𝑩
x2 y 2
L ( x; y; λ=
) f (x; y) + λg (x; y=) 2x + 4 y + λ + − 1
4
9
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, esto es
Lx ( x; y; λ) =
Ly ( x ; y ; λ ) =
Lλ ( x; y; λ) =
2λ x
= 0
9
λy
= 0
4+
2
2+
… (1)
… ( 2)
x2 y 2
+
− 1 = 0 … (3)
9
4
Capítulo 6. Máximos y mínimos de funciones de varias variables
439
Al multiplicar la ecuación (1) por 2 y al restar (2) a este
resultado, se tiene
8x
4x y
λ − = 0 ⇔ λ= 0 ∨ y=
9
9 2
Al reemplazar λ =0 en (1) se obtiene 2 = 0, lo cual es una
contradicción y por lo tanto se descarta esta posibilidad.
Al sustituir y =
8x
en (3) se tiene
9
2
8 x
2
9
x
81
+ − 1 =0 ⇔ x 2 =
9
4
25
⇔ x =±
9
5
9
8
Si x = − , entonces y = − , λ = 5 y el punto crítico de L es
5
5
9 8
P0 − ; − ; 5
5 5
Si x =
9
8
, entonces y = , λ = −5 y el punto crítico de L es
5
5
9 8
P1 ; ; −5
5 5
La matriz hessiana orlada de L en el punto P ( x; y; λ) es
0
=
H [L ( x; y; λ)] g x ( x; y)
g y ( x; y)
0
g x ( x; y )
g y ( x; y )
2x
λ) Lxy ( x; y; λ)
Lxx ( x; y; =
9
Lyx ( x; y; λ) Lyy ( x; y; λ) y
2
2x
9
2λ
9
0
9 8
Al evaluar esta matriz en el punto P0 − ; − ; 5 resulta
5 5
−2 −4
0
5
5
− 2 10
0
H [L ( P0 )] =
9
5
5
−4
0
5
2
El menor principal ∆3 asociado a esta matriz es
0
−2
∆3 [L ( P0 )] =
5
−4
5
440
Cálculo II
−2
5
10
9
0
−4
5
0
5
2
10
=
− <0
9
y
2
0
λ
2
Luego, de acuerdo con el criterio de las segundas derivadas
parciales (teorema 3), el punto Q0 (− 9/ 5; − 8/ 5) , componente del
punto crítico P0 , corresponde a un mínimo condicionado de f y
el valor mínimo condicionado es
9 8
f − ; − =
−10
5 5
De manera similar, al evaluar la matriz hessiana orlada en el
9 8
punto P1 ; ; − 5 se obtiene
5 5
H [L =
P
( 1 )]
0
2
5
4
5
2
5
10
−
9
0
4
5
0
5
−
2
El menor principal ∆3 asociado a esta matriz es
2
5
2
10
∆ 3 [L ( P1 )] = −
5
9
4
0
5
0
4
5
0
−
5
2
10
=
>0
9
Luego, de acuerdo con el criterio de las segundas derivadas
parciales (teorema 3), el punto Q1 ( 9/ 5; 8/ 5) , componente del
punto crítico P1 , corresponde a un máximo condicionado de f
y el valor máximo condicionado es
9 8
f ; = 10
5 5
Nota
Como la función f es continua en R y el conjunto de puntos
2
y2
1,
=
9
4
es cerrado y acotado, otra alternativa para resolver este problema
es usar la observación 6, según la cual solo se evalúa la función f
en los puntos críticos calculados.
factibles, representado gráficamente por la elipse
ε: x
2
+
Al evaluar la función f en los puntos Q0 (− 9/ 5; − 8/ 5) yyQ1 ( 9/ 5; 8/ 5) ,
Q0 (− 9/ 5; − 8/ 5) y Q1 ( 9 / 5; 8/ 5) , componentes de los puntos críticos P0 y P1
respectivamente, se tiene
9 8
9 8
f − ; − =
−10 y f ; =
10
5 5
5 5
Capítulo 6. Máximos y mínimos de funciones de varias variables
441
Luego, la función f tiene mínimo condicionado en el punto
9 8
Q0 − ; − cuyo valor es
5 5
9
cionado en el punto Q1 ;
5
2.
9 8
f − ; − =
−10 , y máximo condi 5 5
8
9 8
cuyo valor es f ; = 10.
5
5 5
Determine los valores máximo y mínimo de la función
2
dada por f ( x; y) =9 + 2 ( x − 3) − ( y + 3)
2
sujeta a la restricción
g ( x; y)= 2x 2 − y 2 − 9= 0
Solución
La función de Lagrange de f sujeta a la restricción dada es
2
2
(
)
L ( x; y ; λ) = 9 + 2 ( x − 3) − ( y + 3) + λ 2x 2 − y 2 − 9
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, esto es
L ( x; y ; =
x + λ=
λ) 4 ( x − 3) + 4 x=
λ 0
… (1)
x 3
x
… ( 2)
Ly ( x; y ; λ) = −2 ( y + 3) − 2 yλ = 0 ⇔ y + λy = −3
2
2
9 0
2x − y − 9 = 0 … (3)
) 2x2 − y 2 − =
Lλ ( x; y; λ=
Al sumar (1) y (2) se tiene
(λ + 1)(x + y) = 0 ⇔
λ = −1 ∨ x = − y
Al reemplazar λ = −1 en la ecuación (1) resulta la contradic­
ción (0 = 3) , por lo que se descarta esta posibilidad.
Al resolver la ecuación (3) para x = − y se obtienen los puntos
críticos P0 (−3; 3; −2) y P1 (3; −3; 0) .
La matriz hessiana orlada de la función L es
0
g x ( x; y )
g y ( x; y )
=
H [L ( x; y ; λ)] gx ( x; y) Lxx ( x; y ; λ) Lxy ( x; y ; λ)
g y ( x; y) Lyx ( x; y; λ) Lyy ( x; y ; λ)
4x
−2 y
0
= 4 x 4 + 4λ
0
−2 y
−2 − 2λ
0
Al evaluar esta matriz en el punto crítico P0 (−3; 3; −2) y P1 (3; −3; 0) .
resulta
0 −12 − 6
H [L (−3; 3; −2)] = −12 − 4 0
− 6
0
2
y el menor principal ∆3 asociado a esta matriz es
442
Cálculo II
0
∆3 [L (−3; 3; − 2)] =−12
−6
−12 − 6
−4
0
0
2
=
−144 < 0
Luego, el punto Q0 (−3; 3) , componente del punto crítico P0 ,
corresponde a un mínimo local condicionado de f y el valor mí­
nimo local condicionado es f (−3; 3) =
45.
De manera similar, al evaluar la matriz hessiana orlada en el
punto crítico P1 (3; −3; 0) se obtiene
0 12 6
12 4
H [L (3; −3; 0)] =
0
6 0 – 2
y el menor principal ∆3 asociado a esta matriz es
0 12 6
∆3 [L (3; −3; 0)] =12 4 0 =144 > 0
6 0 −2
Por consiguiente, el punto Q1 (3; −3) , componente del pun­
to crítico P1 , corresponde a un máximo local condicionado de f
y el valor máximo local condicionado es f (3; −3) =
9.
3.
Determine los valores máximo y mínimo de la función
dada por
f ( x; y ; z) = x + y + z + 4
sujeta a la restricción
g ( x; y ; z) = e x + e y + e z − 3 = 0
Solución
La función de la Lagrange de f sujeta a la restricción dada es
(
)
L ( x; y ; z ; λ ) = x + y + z + 4 + λ e x + e y + e z − 3
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, esto es
Lx ( x;
Ly ( x;
Lz ( x;
Lλ ( x;
y ; z; λ) = 1 + λ e x = 0
... (1)
y ; z; λ) = 1 + λ e = 0
... ( 2)
y ; z; λ) = 1 + λ e z = 0
... (3)
y
y ; z; λ) =e x + e y + e z − 3 =
0 ... ( 4)
Al restar (2) de (1) se obtiene
(
)
λ ex =
− ey 0
⇔
λ= 0 ∨ x= y
Capítulo 6. Máximos y mínimos de funciones de varias variables
443
Al restar (3) de (2) resulta
(
)
λ e y − e z= 0
⇔
λ
= 0 ∨ =
y z
Al reemplazar λ =0 en (1) se obtiene la contradicción
(1 = 0) , por lo que se descarta esta posibilidad.
Luego, al sustituir x= y= z en (4) se tiene x= y= z= 0, y
al reemplazar estos valores en (1), λ = −1. Por consiguiente, el
único punto crítico de L es P0 (0; 0; 0; −1) .
La matriz hessiana orlada de la función L en cualquier
punto P ( x; y; z; λ) es
0
g x ( x; y ; z)
H [L ( P)] =
g y ( x ; y ; z)
g z ( x; y; z)
=
g x ( x; y ; z)
Lxx ( x; y; z; λ) Lxy ( x; y; z; λ)
Lyx ( x; y ; z; λ) Lyy ( x; y ; z; λ)
Lzx ( x; y; z; λ) Lzy ( x; y; z; λ)
0
ex
ey
ex
λe x
0
y
0
λe y
ez
0
0
e
g y ( x; y ; z)
g z ( x; y ; z)
Lxz ( x; y ; z; λ)
Lyz ( x; y ; z; λ)
Lzz ( x; y; z; λ)
ez
0
0
λe z
Al evaluar esta matriz en el punto crítico P0 (0; 0; 0; −1)
resulta
0 1 1 1
1 −1 0 0
H [L (0; 0; 0; −1)] =
1 0 −1 0
−1 0 0 −1
cuyos menores principales ∆3 y ∆ 4 asociados son
0 1 1
∆3 [L (0; 0; 0; −1)] = 1 −1 0 =2 > 0
1 0 −1
0 1 1 1
1 −1 0 0
∆ 4 [L (0; 0; 0; −1)] =
=−3 < 0
1 0 −1 0
1 0 0 −1
Luego, de acuerdo con el criterio de las segundas deriva­
dasparciales (teorema 3), el punto Q0 (0; 0; 0) , componente del
punto crítico P0 , corresponde a un máximo condicionado de f
cuyo valor es
f (0; 0; 0) = 4
444
Cálculo II
4.
Calcule las dimensiones del paralelepípedo rectangular de vo­
lumen máximo que tiene tres de sus caras en los planos coor­
denados, un vértice en el origen y otro vértice en el primer
octante sobre el plano 6x + 4 y + z =
24.
Solución
La capacidad del paralelepípedo rectangular cuyas dimen­
siones de la base son x e y y cuya altura mide z es
=
V f=
(x; y; z) xyz
y la restricción es
6 x + 4 y + z = 24 ⇔ g ( x; y ; z) = 6x + 4 y + z − 24 = 0
La función de Lagrange de f sujeta a la restricción dada es
L ( x; y ; z ; =
λ) xyz + λ (6 x + 4 y + z − 24)
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, es decir
Lx ( x;
Ly ( x;
Lz ( x;
Lλ ( x;
y ; z; λ)= yz + 6λ = 0
... (1)
y ; z; λ)= xz + 4λ = 0
... ( 2)
y; z; λ=
) xy + λ = 0
... (3)
y ; z; λ)= 6 x + 4 y + z − 24 = 0 ... ( 4)
De la ecuación (3) se tiene λ = − xy
Al reemplazar en la ecuación (1), se obtiene
yz − 6xy =0 ⇔ y ( z − 6x) =0 ⇔ y =0 ∨ x =z / 6
De manera similar, al reemplazar en la ecuación (2)
se obtiene
xz − 4xy =0 ⇔ x ( z − 4 y) =0 ⇔ x =0 ∨ y =z / 4
Como x > 0 , y > 0 ∧ z > 0 , las opciones
=
y 0=
y x 0 se
descartan.
z
z
en la ecuación (4) se tiene
Luego, al sustituir
=
x =
, y
6
4
z
z
6 + 4 + z − 24 = 0 ⇔ z = 8
6
4
Así, el único punto crítico de interés para el problema es
P0 (4 / 3; 2; 8; − 8/ 3).
La matriz hessiana orlada de la función L en el punto
P ( x; y ; z; λ) es
Capítulo 6. Máximos y mínimos de funciones de varias variables
445
g x ( P) g y ( P) g z ( P)
0
gx ( P) Lxx ( P) Lxy ( P) Lxz ( P)
H [L ( P)] =
g y ( P) Lyx ( P) Lyy ( P) Lyz ( P)
g ( P) L ( P) L ( P) L ( P)
zx
zy
zz
z
=
0 6 4 1
6 0 z y
4 z 0 x
1 y x 0
Al evaluar esta matriz en el punto crítico P0 (4/ 3; 2; 8; − 8/ 3),
resulta
H [L ( P0 )] =
0
6
4
1
6
4
1
0
8
2
8
0
4/3
2 4/3 0
Los menores principales ∆3 y ∆ 4
matriz son
asociados a esta
0 6 4
∆3 [L ( P0 )] =
6 0 8 =
384 > 0
4 8 0
0
6
∆ 4 [L ( P0 )] =
4
1
6
4
1
0
8
2
=
−192 < 0
8
0
4/3
2 4/3
0
Así, de acuerdo con el criterio de las segundas derivadas
parciales para extremos condicionados, el punto Q0 (4/ 3; 2; 8) ,
componente del punto crítico P0 , corresponde a un máximo
condicionado.
Por lo tanto, las dimensiones del paralelepípedo rectangular
4
de capacidad máxima son
=
x =
u, y 2 u en la base y z = 8 u
3
en la altura.
5.
446
Cálculo II
Se desea construir una terma para almacenar y calentar agua,
cuya capacidad sea de 45π dm3 . La terma debe tener una forma
cilíndrica recta unida a una semiesfera (figura 6.2.5). Determi­
ne la altura h y el radio r de la terma de tal manera que su área
superficial total sea mínima.
Solución
El área de la terma cuyas dimensiones del radio de la base y
cuya altura son r y h decímetros respectivamente, es
A =2πrh + πr 2 + 2πr 2 =2πrh + 3πr 2
r
y la restricción es
2
2
V=
πr 2 h + πr 3 =
45π ⇔ g (r ; h) =
πr 2 h + πr 3 − 45π =
0
3
3
La función de Lagrange del área A sujeta a la restricción
dada es
h
r
Fig. 6.2.5
2
L (r ; h; λ) = 2πrh + 3πr 2 + λ πr 2 h + πr 3 − 45π
3
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, es decir
(
)
Lr (r ; h; λ) = 2πh + 6πr + λ 2πrh + 2πr 2 = 0 ... (1)
L (r ; h; λ)= 2πr + πλr 2 = 0
... ( 2)
h
2
Lλ (r ; h; λ) = πr 2 h + πr 3 − 45π = 0
... (3)
3
De (2) se obtiene
r ( 2 + λr ) = 0 ⇔ r = 0 ∨ λ = −
2
r
Como r > 0, la posibilidad r = 0 se descarta. Luego, al
reemplazar λ = −
2
en (1) se tiene
r
−2πh + 2πr = 0 ⇔ h = r
Al resolver la ecuación (3) para h = r resulta r = 3, de
donde el punto crítico es P0(3; 3; –2/3).
La matriz hessiana orlada de la función L es
0
g r ( r ; h)
g h (r ; h)
=
H [L (r ; h; λ)] gr (r ; h) Lrr (r ; h; λ) Lrh (r ; h; λ)
gh (r ; h) Lhr (r ; h; λ) Lhh (r ; h; λ)
0
= 2πrh + 2πr 2
πr 2
2πrh + 2πr 2
6π + 2πλ (h + 2r )
2π + 2πrλ
πr 2
2π + 2πrλ
0
Al evaluar esta matriz en el punto crítico P0 (3; 3; −2/ 3) ,
resulta
Capítulo 6. Máximos y mínimos de funciones de varias variables
447
0 36π 9π
H [L (3; 3; − 2 / 3)=
] 36π −6π −2π
9π −2π 0
cuyo menor principal ∆3 asociado a la matriz es
0
36π
9π
∆3 [L (3; 3; − 2/ 3)] = 36π −6π −2π =−810π3 < 0
9π −2π 0
Así, el punto Q0 (3; 3) , componente del punto crítico P0 ,
corresponde a un mínimo condicionado de A. Por lo tanto, pa­
ra que el área superficial total de la terma sea mínima y su
capacidad sea de 45 π dm3 , las dimensiones deben ser
=
h 3=
dm , r 3 dm
6.
Una empresa proyecta invertir S/ 102000 en publicidad en ra­
dio y en televisión. Se sabe que el minuto de publicidad en tele­
visión cuesta S/ 5000, mientras que en la radio cuesta S/ 2000.
Si x es el número de minutos que la empresa contrata en tele­
visión e y el número de minutos que contrata en la radio, su
ingreso (en miles de soles) por ventas es
I ( x; y ) =
−3x 2 − 2 y 2 + 4xy + 10x + 4 y + 750
¿Cuántos minutos de publicidad debe contratar en radio y
cuántos en televisión para maximizar su ingreso por ventas?
Solución
Los datos del problema se muestran en la siguiente tabla.
Medio de
Minutos
Costo por minuto
Inversión
comunicación contratados (en miles de soles) (en miles de soles)
Televisión
x
5
5x
Radio
y
2
2y
El ingreso de la empresa (en miles de soles) por contratar x
minutos de publicidad en televisión e y minutos de publicidad
en radio es
I ( x; y ) =
−3x 2 − 2 y 2 + 4xy + 10x + 4 y + 750
sujeto a la restricción
g ( x; y) = 5x + 2 y − 102 = 0
La función de la Lagrange de I sujeta a la restricción dada es
L ( x; y ; z ; λ) =
−3x 2 − 2 y 2 + 4xy + 10x + 4 y + 750 + λ (5x + 2 y − 102)
448
Cálculo II
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, esto es
Lx ( x; y; λ) = −6x + 4 y + 10 + 5λ = 0 ... (1)
) 4x − 4 y + 4 + 2λ= 0 ... ( 2)
Ly (r ; h; λ=
... (3)
Lλ ( x; y; λ)= 5x + 2 y − 102= 0
Al restar (1) multiplicado por 2 de (2) multiplicado por 5, se
obtiene
y=
8x
7
Luego, al reemplazar esta expresión en (3) resulta x = 14,
de donde y = 16 y λ =2. Por lo tanto, el único punto crítico de
L es P0 (14; 16; 2) .
La matriz hessiana orlada de la función L en el punto
P0 (14; 16; 2) es
0 5 2
H [L (14; 16;=
2) ] 5 −6 4
2 4 −4
y el menor principal ∆3 asociado a esta matriz es
0 5
2
∆3 [L (14; 16; 2)] =
5 −6 4 =
204 > 0
2 4 −4
Luego, de acuerdo con el criterio de las segundas deriva­
das parciales (teorema 3), el punto Q0 (14; 16) , componente del
punto crítico P0 , corresponde a un máximo de I.
Por lo tanto, para que el ingreso de la empresa sea
máximo se deben contratar 14 minutos en televisión y 16
minutos en radio.
7.
El rendimiento semanal de un trabajador (en unidades producidas) está dado por R ( x; y) = 50x3/ 2 y1/ 2 donde x es el número
de horas semanales trabajadas e y es el número de horas se­
manales de capacitación que recibe el trabajador. Si se dispone
de 48 horas semanales para trabajo y capacitación, determine
el número de horas semanales de capacitación que requiere el
trabajador para que su rendimiento semanal sea máximo.
Solución
La función de Lagrange de f sujeta a la restricción dada es
L (=
x; y; λ) 50x3/ 2 y1/ 2 + λ ( x + y − 48)
Capítulo 6. Máximos y mínimos de funciones de varias variables
449
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, esto es
2 1/ 2
Lx =
y + λ 0 ... (1)
(x; y; λ) 75x1/ =
3
/
2
25x
=
+λ 0
y ; λ)
... ( 2)
Ly ( x;=
y1/ 2
... (3)
Lλ ( x; y; λ) = x + y − 48 = 0
Al restar (2) de (1), se obtiene
75x1/ 2 y1/ 2 −
25x3/ 2
y1/ 2
= 0 ⇔ x = 3y
Al reemplazar x = 3y en (3) resulta y = 12, de donde x = 36.
Al sustituir los valores de x e y en (1) resulta λ = −900 3.
Luego, el único punto crítico de L es P0 36; 12; − 900 3 .
(
)
La matriz hessiana orlada de la función L en cualquier
punto P ( x; y; λ) es
0
g x ( x; y )
g y ( x; y )
=
H [L ( x; y ; λ)] gx ( x; y) Lxx ( x; y ; λ) Lxy ( x; y ; λ)
g y ( x; y) Lyx ( x; y ; λ) Lyy ( x; y; λ)
0
= 1
1
1
1
1/ 2
75 y
2 x
1/ 2
75 x
2 y
1/ 2
75 x
2 y
3/ 2
25 x
−
2 y
(
)
Al evaluar esta matriz en el punto crítico P0 36; 12; −900 3 ,
resulta
1
0
1 25 3
H L 36; 12; − 900 3 , =
2
75
3
1
2
(
)
1
75 3
2
75 3
−
2
y el menor principal ∆3 asociado a esta matriz es
0
(
)
∆3 L 36; 12; −900 3 = 1
1
450
Cálculo II
1
25 3
2
75 3
2
1
75 3
=100 3 > 0
2
75 3
−
2
Luego, el punto Q0(36; 12), componente del punto crítico P0 ,
corresponde a un máximo local condicionado de R.
Por lo tanto, para que el rendimiento del trabajador sea
máximo debe tener 12 horas semanales de capacitación.
Ejercicios y problemas propuestos 6.2
1.
Sujeta a la restricción
2
6.
2
100
sujeta a la restricción x + y =
2.
Halle los puntos de la superficie
Determine los valores máximo y mínimo de
la función dada por
f ( x; y ; z) =
− x 2 − 2 y 2 − 2z 2 + 60
sujeta a la restricción
g ( x; y ; z) = x + 2 y + z = 14
4.
Determine los valores máximo y mínimo de
la función dada por
f ( x; y=
) ax + by
r2
sujeta a la restricción x 2 + y 2 =
donde a, b y r son números reales con
a2 + b2 ≠ 0 y r > 0.
5.
+
Un rectángulo tiene dos de sus lados coinci­
dentes con los ejes coordenados y dos de sus
vértices son el origen de coordenadas y un
punto en el primer cuadrante sobre la curva
y
12 − 3x. Utilice multiplica­
de ecuación=
dores de Lagrange para determinar las di­
mensiones del rectángulo de área máxima.
S : x2 + y 2 + z2 =
24
que se encuentren más cerca y más lejos del
punto A (2; 1; 1) .
3.
y2
=
1
u2 v 2
donde a, b, u y v son números reales con
a2 + b2 ≠ 0 , u > 0 y v > 0.
Determine los valores máximo y mínimo de
la función dada por
f ( x; y=
) 3x − 4 y
x2
7.
Un confeccionista textil necesita comprar
pintura verde y roja para estampar polos. El
galón de pintura verde cuesta S/ 100, mien­
tras que el de pintura roja cuesta S/ 300 y el
confeccionista dispone de S/ 10 000 para la
compra. Si utiliza x galones de pintura verde
e y galones de pintura roja, su ingreso por
ventas será
I ( x; y ) =
− x 2 − 2 y 2 + xy + 8x + 24 y + 5000
Determine usando el método de los mul­
tiplicadores de Lagrange cuántos galones
de pintura de cada color debe comprar para
maximizar su ingreso por ventas.
Determine los valores máximo y mínimo de
la función dada por
f ( x; y=
) ax + by
Capítulo 6. Máximos y mínimos de funciones de varias variables
451
6.3Revisión del capítulo
El siguiente esquema resume el contenido del capítulo.
Máximos y mínimos
de funciones
de varias variables
Extremos no condicionados
Extremos
condicionados
Criterio de las segundas
derivadasparciales
Método de los
multiplicadores de Lagrange
Ejercicios y problemas resueltos 6.3
1.
Dada la función f definida por
f ( x; y ; z) = 2x3 − 2xy + y 2 + 7 z 2 − 8x − 28z − 6
Determine los valores extremos relativos de f en caso de que
existan.
Solución
El dominio de la función f es Dom( f ) = R3.
Para determinar los puntos críticos de f se igualan a cero las
derivadas parciales de primer orden de f, esto es
f x ( x; y; z)= 6x 2 − 2 y − 8= 0 ... (1)
−2x + 2 y =
... ( 2)
0
f y ( x; y ; z) =
... (3)
f z ( x; y; z) = 14z − 28 = 0
452
Cálculo II
De la ecuación (2) se tiene
y=x
Al reemplazar y = x en la ecuación (1) resulta
6x 2 − 2x − 8 = 0 ⇔ (3x − 4)(2x + 2) = 0,
⇔ x=
4/3 ∨ x=
−1
Por otro lado, de la ecuación (3), z = 2
Luego, los puntos críticos son
P0 (−1; −1; 2) y P1 (4 / 3; 4 / 3; 2)
La matriz hessiana correspondiente a la función f en cual­
quier punto ( x; y ; z) ∈ Dom ( f ) es
f xx ( x; y; z)
H [ f ( x; y; z) ] = f yx ( x; y; z)
f zx ( x; y ; z)
f xy ( x; y; z)
f yy ( x; y ; z)
f zy ( x; y ; z)
f xz ( x; y ; z)
f yz ( x; y ; z)
f zz ( x; y ; z)
12x −2 0
= −2 2 0
0
0 14
y sus menores principales en cualquier punto ( x; y ; z) ∈ Dom ( f )
son
∆1 [ f ( x; y ; z) ] = f xx ( x; y ; z) =12x
12x −2
∆ 2 [ f ( x; y ; z) ] = =
4 (6x − 1)
−2 2
∆3 [
12x −2 0
f ( x; y ; z) ] =
−2 2 0 =
56 (6x − 1)
0
0 14
Al aplicar el teorema 2 en cada punto crítico resulta la
siguiente tabla
Punto crítico
∆1
∆2
P0 (−1; −1; 2)
–12
– 28 – 392
4 4
P1 ; ; 2
3 3
16
28
∆3
392
Clasificación
Punto silla en (−1; −1; 2)
4 4
Mínimo local en ; ; 2
3 3
Por lo tanto, de acuerdo con el teorema 2, f tiene un mínimo
local en el punto A (4/ 3; 4/ 3; 2) y su valor mínimo local es
f (4 / 3; 4 / 3; 2) = −1126 / 27
Capítulo 6. Máximos y mínimos de funciones de varias variables
453
2.
Una empresa de transporte de pasajeros acepta envíos de pa­
quetes postales rectangulares cuyo perímetro de la base más
su respectiva altura sea igual a 120 cm. ¿Cuáles son las dimen­
siones del paquete de máximo volumen que se puede enviar?
Solución
Si x e y son las dimensiones de la base y h la altura del paquete,
el objetivo es maximizar el volumen
V = xyh
120
sujeto a la restricción 2x + 2 y + h =
Se trata de un problema de máximo condicionado en el que
al despejar h = 120 − 2x − 2 y y sustituir esta expresión en la fór­
mula del volumen se convierte en un problema de máximo sin
condiciones. Es decir, maximizar el volumen
V ( x; y ) =
xy (120 − 2x − 2 y) =
−2x 2 y − 2xy 2 + 120xy
Al igualar las derivadas parciales de primer orden a cero de
V se tiene
Vx ( x; y) =
−4xy − 2 y 2 + 120 y =⇔
0
y (−4x − 2 y + 120) =
0
2
−2x − 4xy + 120x =⇔
0
x (−2x − 4 y + 120) =
0
Vy ( x; y) =
Como x e y son números positivos se descartan las posibili­
dades=
y 0=
, x 0. Luego, al resolver el sistema de ecuaciones
0
− 4x − 2 y + 120 =
0
− 2x − 4 y + 120 =
se obtiene
=
x 20
=
, y 20 , esto es, el único punto crítico de in­
terés es P0 (20; 20) .
Para verificar que el punto crítico corresponde a un máximo
relativo de la función V se usa el criterio de las derivadas par­
ciales de segundo orden.
Así, la matriz hessiana de V y sus menores principales en
cualquier punto P ( x; y) son
Vxx ( x; y) Vxy ( x; y)
H [ V ( x; y ) ] =
Vyx ( x; y) Vyy ( x; y)
− 4y
H [ V ( x; y ) ] =
− 4x − 4 y + 120
− 4x − 4 y + 120
− 4x
∆1 [V ( x; y)] =
Vxx ( x; y) =
− 4y
∆ 2 [ V ( x; y=
)]
454
Cálculo II
Vxx ( x; y) Vxy ( x; y)
2
= 16xy − (− 4x − 4 y + 120)
Vyx ( x; y) Vyy ( x; y)
Al evaluar los menores principales en el punto P (20; 20) ,
se tiene la siguiente tabla
Punto crítico
∆1
∆2
Clasificación
P0 (20; 20)
–80
4800
Máximo relativo en P0 (20; 20)
Por lo tanto, las dimensiones del paquete de máximo volu­
men son: la base es un cuadrado de 20 cm de lado y su altura
es de 40 cm.
3.
Una joyería vende dos tipos similares de sortijas de plata, A y
B. Su gerente comercial estima que si los precios unitarios de
venta para los tipos A y B son respectivamente x e y, enton­
ces venderá en una semana 120 − 2x + y sortijas del tipo A y
210 + x − 2 y del tipo B. Si los costos unitarios de fabricación
son de S/ 60 y S/ 40 para los tipos A y B respectivamente, cal­
cule los precios de venta que se deben fijar para que la utilidad
semanal de la joyería sea máxima.
Solución
Los datos del problema se muestran en la siguiente tabla
Tipo de Costo unitario Precio de venta Demanda semanal
sortija
(soles)
unitario (soles) (número de sortijas)
A
60
x
120 − 2x + y
B
40
y
210 + x − 2 y
La utilidad semanal de la joyería por la venta de las sortijas
de tipos A y B está dada por
Utilidad = Ingreso – Costo
U=
( x; y ) I ( x; y ) − C ( x; y )
donde, según los datos de la tabla
I ( x; =
y) x (120 − 2x + y) + y (210 + x − 2 y)
C ( x=
; y) 60 (120 − 2 x + y) + 40 (210 + x − 2 y)
Luego,
U ( x; y ) =
−2x 2 + 2xy − 2 y 2 + 200x + 230 y − 15 600
Para determinar los precios que maximizan la utilidad se ha­
llan los puntos críticos de U. Así, al igualar a cero las derivadas
parciales de primer orden de U, se tiene
Capítulo 6. Máximos y mínimos de funciones de varias variables
455
− 4x + 2 y + 200 =
0
U x ( x; y) =
x 105,=
y 110
U x; y = 2x − 4 y + 230 = 0 ⇔=
)
y (
Luego, el único punto crítico de la función utilidad es
P (105; 110) .
Para verificar que el punto crítico corresponde a un máximo
relativo de la función U se usa el criterio de las derivadas par­
ciales de segundo orden.
Así, la matriz hessiana de U y sus menores principales en
cualquier punto ( x; y) son
U xx ( x; y) U xy ( x; y) − 4 2
=
H [ U ( x; y) ] =
U yx ( x; y) U yy ( x; y) 2 − 4
∆1 [U ( x; y)] =
U xx ( x; y) =
−4
∆ 2=
[ U ( x; y ) ]
U xx ( x; y) U xy ( x; y)
= 12
U yx ( x; y) U yy ( x; y)
Al evaluar los menores principales en el punto P (105; 110)
se tiene la siguiente tabla
Punto crítico
∆1
∆2
Clasificación
(105; 110)
–4
12
Máximo relativo en (105; 110)
Por lo tanto, para obtener la máxima utilidad semanal los
precios de venta de las sortijas de los tipos A y B que debe fijar
la joyería son de S/ 105 y S/ 110 respectivamente.
4.
Determine los valores máximo y mínimo de la función
dada por
f ( x; y ) =
72
xy
sujeta a la restricción
g ( x; y)=
x2 y 2
+
− 1= 0
16 9
Solución
La función de Lagrange de f sujeta a la restricción dada es
L ( x; y; λ=
)
x2 y 2
72
+λ +
− 1
16 9
xy
Los puntos críticos de L se determinan al igualar a cero sus
derivadas parciales de primer orden, esto es
456
Cálculo II
72 λx
Lx ( x; y; λ) =− 2 + 8 =0 ... (1)
x y
72 2λy
=0 ... ( 2)
Ly ( x; y; λ) =− 2 +
9
xy
2
2
L ( x; y ; λ)= x + y − 1= 0 ... (3)
λ
16 9
Al multiplicar la ecuación (1) por x y la ecuación (2)
por y, se tiene
72 λx 2
0 ... ( 4)
+
=
−
8
xy
2
72 2λy
−
+
=
0 ... (5)
xy
9
Al restar la ecuación (5) de (4) se obtiene
x2 2y 2
3x
λ x 2 2λ y 2
−
= 0 ⇔ λ −
= 0 ⇔ λ = 0 ∨ y = ±
8
9
9
4
8
Para λ =0, en la ecuación (1) se obtiene la contradicción
−
72
0) , por lo que se descarta esta posibilidad.
( =
Al resolver la ecuación (3) para y = ± 3x / 4, , se obtienen los
puntos críticos
3 2
3 2
3 2
P1 2 2 ;
; 12 , P2 −2 2 ; −
; 12 , P3 2 2 ; −
; −12
2
2
2
3 2
y P4 −2 2 ;
; −12
2
La matriz hessiana orlada de L en cualquier punto
P ( x , y , λ) es
0
g x ( x; y )
g y ( x; y )
=
H [ L ( x; y; λ) ] g x ( x; y) Lxx ( x; y; λ) Lxy ( x; y; λ)
g y ( x; y) Lyx ( x; y; λ) Lyy ( x; y ; λ)
=
0
x
8
2y
9
x
8
144 λ
+
x3 y 8
72
x2 y 2
x2 y 2
144 2λ
+
xy3 9
2y
9
72
Capítulo 6. Máximos y mínimos de funciones de varias variables
457
(
)
Al evaluar esta matriz en el punto crítico P1 2 2 ; 3 2 / 2; 12 ,
resulta
0
2
3 2
H L 2 2 ;
; 12 =
2
4
2
3
2
3
2
8
2
4
9
2
2
y el menor principal ∆3 asociado a esta matriz es
0
3 2
2
∆ 3 L 2 2 ;
; 12 =
2
4
2
3
(
2
4
9
2
2
3
2
8
2
4
=
− <0
3
)
Luego, el punto Q1 2 2 ; 3 2 / 2 , componente del punto
crítico P1 , corresponde a un mínimo local condicionado de f
y el valor mínimo condicionado es f 2 2 ; 3 2 / 2 = 12.
(
)
De manera similar, al evaluar la matriz hessiana orlada en
el punto crítico P2 −2 2 ; −3 2 / 2; 12 se obtiene:
(
)
0
3 2
2
−
H L −2 2 ; −
; 12 =
2
4
2
− 3
−
2
4
9
2
2
3
2
8
−
2
y el menor principal ∆3 asociado a esta matriz es
0
3 2
2
∆3 L −2 2 ; −
; 12 =−
4
2
2
−
3
−
2
4
9
2
−
2
(
2
3
4
=
− <0
3
2
8
)
Por consiguiente, el punto Q2 −2 2 ; − 3 2 / 2 , compo­
nente del punto crítico P2 , corresponde a un mínimo lo­
cal condicionado de f y el valor mínimo condicionado es
f −2 2 ; −3 2 / 2 =
12.
(
)
De manera análoga, al evaluar la matriz hessiana orlada en
(
)
el punto crítico P3 2 2 ; − 3 2 / 2; −12 se obtiene
458
Cálculo II
0
2
3 2
H L 2 2 ; −
; −12=
2
4
2
− 3
2
4
9
−
2
2
3
2
−8
−
2
y el menor principal ∆3 asociado a esta matriz es
2
4
9
−
2
0
3 2
2
∆ 3 L 2 2 ; −
; − 12 =
2
4
2
−
3
2
3
−
2
2
4
=> 0
3
−8
(
)
Por consiguiente, el punto Q3 2 2 ; − 3 2 / 2 , componente
del punto crítico P3 , corresponde a un máximo local con­
dicionado de f y el valor máximo condicionado es
(
)
f 2 2; − 3 2 /2 =
−12.
De manera similar, al evaluar la matriz hessiana orlada en
(
)
el punto crítico P4 −2 2 ; 3 2 / 2; −12 se obtiene:
0
3 2
2
H L −2 2 ;
; − 12 =
− 4
2
2
3
2
4
9
−
2
−
2
2
3
2
−8
y el menor principal ∆3 asociado a esta matriz es
0
2
4
9
−
2
2
3
2
−8
−
3 2
2
∆3 L −2 2 ;
−
; −12 =
2
4
2
3
(
2
4
=> 0
3
)
Por consiguiente, el punto Q4 −2 2 ; 3 2 / 2 , componente del
punto crítico P4 , corresponde a un máximo local condicionado
−12.
de f y el valor máximo condicionado es f −2 2 ; 3 2 / 2 =
(
)
Capítulo 6. Máximos y mínimos de funciones de varias variables
459
5.
Una agencia aduanera debe renovar sus contenedores, para
lo cual debe cambiar las dimensiones de los actuales. Cada
contenedor nuevo debe tener 24 m3 de capacidad y cada metro
cuadrado de la base, la tapa y los lados cuesta $ 4, $ 2 y $ 1 res­
pectivamente. Utilice multiplicadores de Lagrange para deter­
minar las dimensiones del contenedor de menor costo posible.
Solución
Los datos del problema se muestran en la siguiente tabla.
z
y
x
Fig. 6.3.1
V = xyz = 24
⇔ g ( x; y ; z) =
xyz − 24 = 0
Costo ($/m2 )
Área (en m2 )
Costo ($)
Base
4
xy
4xy
Tapa
2
xy
2xy
Lados
1
2xz + 2 yz
2xz + 2 yz
El costo de cada contenedor es
C ( x; y ; z) = 6xy + 2xz + 2 yz y la restricción es
g ( x; y; z) = xyz − 24 = 0
La función de Lagrange de C sujeta a la restricción dada es
L ( x; y ; z ; =
λ) 6xy + 2xz + 2 yz + λ ( xyz − 24)
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, esto es
)
Lx ( x; y; z; λ=
)
Ly ( x; y; z; λ=
)
Lz ( x; y; z; λ=
)
Lλ ( x; y; z; λ=
6 y + 2z + λyz= 0 ... (1)
6x + 2z + λxz= 0 ... ( 2)
2x + 2 y + λxy= 0 ... (3)
xyz − 24
= 0
... ( 4)
Al restar (2) de (1) y factorizar y − x , se obtiene
(6 + λz)( y − x) = 0 ⇔
λz = −6 ∨ y = x
Al reemplazar λz =− 6 en la ecuación (2) se obtiene la
solución z = 0 , la cual se descarta porque z > 0.
Al sustituir y = x en (3) y como x > 0, se tiene
4 x + λx 2 = 0 ⇒ x = −
4
λ
−4
−12
y de (2) resulta z =
. Al remplazar estos
λ
λ
valores en (4) resulta
Luego, y =
4 4 12
24
λ3 =
−8 ⇔ λ =
−2
− − − =⇔
λ λ λ
460
Cálculo II
En consecuencia, el único punto crítico de L es P0 (2; 2; 6; −2) .
La matriz hessiana orlada de la función L en el punto
P ( x; y; z; λ) es
g x ( P) g y ( P) g z ( P)
0
gx ( P) Lxx ( P) Lxy ( P) Lxz ( P)
H [L ( P)] =
=
g y ( P) Lyx ( P) Lyy ( P) Lyz ( P)
g ( P) L ( P) L ( P) L ( P)
zx
zy
zz
z
yz
xz
xy
0
yz
0
6 + λz 2 + λy
xz 6 + λz
0
2 + λx
0
xy 2 + λy 2 + λx
Al evaluar esta matriz en el punto crítico P0 (2; 2; 6; − 2) ,
resulta
0 12 12 4
12 0 −6 −2
H [L ( P0 )] =
12 −6 0 −2
4 −2 −2 0
Los menores principales asociados a esta matriz son
0 12 12
∆3 [L ( P0 )] =12 0 −6 =
−1728 < 0
12 −6 0
0
12
∆ 4 [L ( P0 )] =
12
4
12 12 4
0 −6 −2
=
−1728 < 0
−6 0 −2
−2 −2 0
Así, de acuerdo con el criterio de las segundas derivadas
parciales para extremos condicionados, el punto Q0 (2; 2; 6) ,
componente del punto crítico P0 , corresponde a un mínimo
condicionado.
Por lo tanto, el contenedor de menor costo tiene una base
cuadrada de 2 m de lado y una altura de 6 m .
6.
Determine las dimensiones del paralelepípedo de capacidad
máxima que se puede inscribir en un elipsoide cuyos semiejes
Z
=
a 2=
3 , b 4 3 y c = 3 3 unidades respectivamente.
miden
Solución
2z
En la figura 6.3.2 se muestra un paralelepípedo inscrito en el
elipsoide dado, cuyos lados miden 2 x , 2 y y 2z. Así, la capa­
cidad del paralelepípedo es V = 8xyz y el punto A ( x; y; z)
pertenece al elipsoide de ecuación
2x
2y
Y
X
Fig. 6.3.2
Capítulo 6. Máximos y mínimos de funciones de varias variables
461
x2 y 2 z2
1
+
+
=
12 48 27
Así, se debe maximizar la función V = 8xyz, sujeta a la
condición
g ( x; y; z)=
x2 y 2 z2
+
+
− 1= 0
12 48 27
La función de Lagrange de V sujeta a la restricción dada es
x2 y 2 z2
L ( x; y ; z;=
λ) 8xyz + λ +
+
−1
12 48 27
Para determinar los puntos críticos de L se igualan a cero
sus derivadas parciales de primer orden, esto es
λx
... (1)
) 8yz + = 0
Lx ( x; y; z; λ=
6
λy
... ( 2)
) 8xz + = 0
Ly ( x; y ; z; λ=
24
2λ z
L ( x; y ; z; λ=
8xy + = 0
... (3)
)
z
27
2
2
2
L x; y ; z; λ =x + y + z − 1 =
0 ... ( 4)
(
)
λ
12 48 27
Al multiplicar (1) por y / 4 , (2) por x, restar ambas expre­
siones y como x > 0, y > 0, z > 0 , se obtiene
8x 2 z − 2 y 2 z = 0 ⇔ x =
y
2
Al multiplicar (2) por 2 z / 27 y (3) por y / 24 y restar ambas
expresiones resulta
3y
16xz 2 8xy 2
−
=0 ⇔ z=
27
24
4
Al sustituir
=
x y=
/ 2 , z 3y / 4 en la ecuación (4) se tiene
y = 4, de donde=
x 2=
, z 3. Finalmente, al reemplazar estos va­
lores en (1) se tiene λ = −288. En consecuencia, P0 (2; 4; 3; − 288)
es el único punto crítico de interés de L.
La matriz hessiana orlada de la función L en el punto
P ( x; y; z; λ) es
g x ( P) g y ( P) g z ( P)
0
gx ( P) Lxx ( P) Lxy ( P) Lxz ( P)
H [L ( P)] =
g y ( P) Lyx ( P) Lyy ( P) Lyz ( P)
g ( P) L ( P) L ( P) L ( P)
zx
zy
zz
z
462
Cálculo II
H [L ( P)] =
0
x
6
λ
6
x
6
y
8z
24
2z
8y
27
y
24
8z
λ
24
8x
2z
27
8y
8x
2λ
27
Al evaluar esta matriz en el punto crítico P0 (2; 4; 3; − 288) ,
resulta
H [L ( P0 )] =
0
1
3
1
6
2
9
1
3
1
6
2
9
− 48 24
32
24 −12 16
64
32
16 −
3
Los menores principales asociados a esta matriz son:
0
1
3
1
6
1
3
1
6
1
16
∆3 [L ( P0 )] = − 48 24 =
>0
3
3
1
24 −12
6
0
2
9
1
− 48 24
32
1024
3
∆ 4 [L ( P0 )] =
=
−
<0
1
3
24 −12 16
6
2
64
32
16 −
9
3
Así, de acuerdo con el criterio de las segundas derivadas
parciales para extremos condicionados, el punto Q0 (2; 4; 3) ,
componente del punto crítico P0 , corresponde a un máximo
condicionado.
Por lo tanto, el paralelepípedo de máxima capacidad tiene
una base rectangular de 2u por 4u y una altura de 3u.
Capítulo 6. Máximos y mínimos de funciones de varias variables
463
Ejercicios y problemas propuestos 6.3
e) f ( x; y ; z) =10 + 2x + 2 y + z 2
Restricción: g ( x; y; z) = x + y + z − 3 = 0
1.
Determine los valores extremos relativos de
cada una de las siguientes funciones en caso
de que existan.
6.
C:
a) f ( x; y) = 2x 4 − 3xy 2 − 16x − y3 + 36
b) g ( x; y; z) =
−2x 2 − y 2 − 3z3 − 2xy + 18z + 9x
3.
4.
Determine las dimensiones del paralelepí­
pedo de área total 384 cm2 cuya diagonal
tenga la mínima longitud.
7.
x2
64
8.
Una empresa industrial exporta x, y y z
toneladas de harina de pescado a tres países
respectivamente. Sus costos de transporte
son variables: cada tonelada enviada al pri­
mer país cuesta 2x − 2 y cientos de dólares;
al segundo país 6 y − 2 x − 6 z cientos de dó­
lares, y al tercer país 12z − 4 y cientos de
dólares. Si el total de toneladas para expor­
tar es de 690 toneladas, ¿cuántas toneladas
debería exportar la empresa a cada país para
minimizar sus costos de transporte?
9.
Determine la ecuación del plano tangente a
la superficie
T ( x; y ; z) = 3x + y + z
calcule las temperaturas máxima y mínima.
Utilice el método de multiplicadores de
Lagrange para determinar los valores má­
ximo y mínimo de cada una de las siguientes
funciones sujetas a las restricciones dadas.
a)
f ( x; y=
) x4 + y 4
Restricción: g ( x; y) = xy − 4 = 0
128
xy
Restricción: g ( x; y) = x 2 + 4 y 2 − 32 = 0
b) f ( x; y) =
c)
f ( x; y=
) x3 + y 3
Restricción: g ( x; y) = 3x + 6 y − 27 = 0
2
2
x2
− y2 − z
2
Restricción: g ( x; y; z) = x + 2 y + z − 10 = 0
d) f ( x; y ; z) =
464
Cálculo II
y2
= 1, x < 0, y < 0
100
que forma con los ejes coordenados un trián­
gulo de área mínima.
27 está dada por
elipsoide 9x 2 + y 2 + z 2 =
5.
Determine la ecuación de la recta tangente a
la curva
C : +
Calcule las dimensiones de la piscina abier­
ta de forma rectangular cuya capacidad es
de 256 m3 para que su superficie total sea
mínima.
Si la temperatura en cada punto ( x; y ; z) del
x2 y 2
1
+
=
8 32
de manera que la recta tangente a la elipse
en el punto P0 y los ejes coordenados formen
un triángulo de área mínima.
c) h ( x; y; z) =
− x3 + 3x + 2 y 2 + 4 yz + 8 y + 4 z3
2.
Determine un punto P0 en el primer cua­
drante y sobre la elipse
x2 y 2 z2
S : +
+
= 1, x > 0, y > 0, z > 0
12 27 48
que forma con los planos coordenados una
pirámide de volumen mínimo.
Capítulo
7
Integral doble
En este capítulo se trata el concepto de
integral doble de una función real de dos
variables sobre una región cerrada y acotada del plano, y su cálculo a través de integrales iteradas.
También se calcula el volumen de un sólido limitado por superficies mediante el
uso de integrales dobles.
Sabes
Capacidades necesarias:
ü Calcular la integral definida de una
función.
ü Graficar regiones en el plano.
ü Graficar superficies cuádricas
y cilíndricas.
ü Calcular el determinante de una
matriz de orden 2.
Conocimientos previos
Integral definida. Métodos de
integración.
Gráfica de regiones en el plano.
Gráfica de superficies en el espacio.
Identidades trigonométricas.
Determinantes.
Piensas
Habilidades por desarrollar:
ü Calcular la integral doble de una
función de dos variables.
ü Calcular el volumen de un sólido en
el espacio.
ü Calcular el área de una región plana
mediante integrales dobles.
Secciones
7.1 Integral doble
7.2 Volumen de un sólido
7.3 Revisión del capítulo
Haces
Competencias por alcanzar:
ü Resolver ejercicios y problemas que
involucren el cálculo de integrales
dobles.
De manera similar a la integral definida de una función de una variable que
resolvió el problema de calcular el área de una región plana limitada por curvas, la integral doble de una función de dos variables, definida en una región
plana, surgió para calcular el volumen de un sólido limitado por superficies en
el espacio tridimensional.
La geometría elemental permite calcular el volumen de algunos sólidos conocidos como, por ejemplo, cilindros circulares, conos circulares, esferas, prismas o pirámides. Pero si el sólido limitado por superficies es como el que se
muestra en la figura 7.1, no es posible utilizar alguna de las fórmulas elementales de los sólidos mencionados.
Z
Y
X
Fig. 7.1
El concepto de integral doble no solo está ligado al cálculo del volumen de
un sólido, sino que también es aplicable a diferentes áreas del conocimiento.
Así, por ejemplo, permite estudiar algunos conceptos físicos como la masa,
momentos estáticos de figuras planas, centros de masa, momentos de inercia
para una región bidimensional y carga eléctrica acumulada en una lámina. En
estadística se aplica para calcular la probabilidad de una región plana y para
estimar parámetros de distribuciones bidimensionales.
El cálculo de varias variables, particularmente la integral doble, fue desarrollado principalmente durante los siglos XVIII y XIX. Los autores que más contribuyeron a esto fueron Alexis Fontaine de Bertins, Euler, Clairaut y D’Alembert.
466
Cálculo II
7.1 Integral doble
En este capítulo se extiende el concepto de integral definida de una
función de una variable a funciones de varias variables. Se presenta
la definición de la integral doble de una función continua de dos
variables definida en una región cerrada y acotada en 2 . También
se muestra el procedimiento para calcular las integrales dobles mediante integrales iteradas. En algunos casos, para facilitar el cálculo
de las integrales dobles, se utiliza el cambio en el orden de integración o se hace un cambio de variable mediante las coordenadas
polares. Finalmente, se emplean las integrales dobles para calcular
volúmenes de sólidos limitados por superficies.
Partición de una región rectangular
Sea R una región rectangular en el plano XY dada por
=
R
{ ( x ; y ) ∈ 2 / a ≤ x ≤ b; c ≤ y ≤ d }
como se muestra en la figura 7.1.1
Y
d
R
c
0
a
b
X
Fig. 7.1.1
Una partición de la región rectangular R es el conjunto P
dado por
P=
{ [xi −1 ; xi ] × y j −1 ; y j / i =
1, … , m ; j =
1, … , n }
donde
b ], a
{ x0 ; x1 ; …; xm } es una partición de [ a;=
=
P2 { y0 ; y1 ; …; yn } es una partición de [ c;=
d ], c
=
P1
x=
b
0 , xm
y=
d
0 , yn
Observación 1
a) La partición
P=
{ [ xi −1 ; xi ] × y j −1 ; y j / i =
1, … , m; j =
1, … , n }
divide a la región rectangular R en m × n subrectángulos de
la forma
Capítulo 7. Integral doble
467
Rij =
1, … , m; j =
1, … , n ,
[ xi −1 ; xi ] × y j −1 ; y j , i =
los cuales se muestran en la figura 7.1.2.
Y
Rij =
1, … , m; j =
1, … , n
[ xi −1 ; xi ] × y j −1 ; y j , i =
d
yj
R
0
a x1
yj – 1
y1
c
xi – 1 xi
b
X
Fig. 7.1.2
( )
( )
b) El área A Rij y la longitud de la diagonal Diag Rij de cada
subrectángulo Rij están dados respectivamente por
( )
(
A Rij =
(∆ xi ) (∆ y j ) =
(xi − xi −1 ) × y j − y j −1
( )
(∆ xi )2 + (∆ y j )
Diag Rij =
2
)
(xi − xi −1 )2 + ( y j − y j −1 )
=
c) La norma de la partición P es el número real
2
P =
max {por
Diag (Rij ) / i =
1, … ,
dado
P =
max { Diag (Rij ) / i =
1, … , m; j =
1, … , n }
Es decir, la norma de la partición P es el valor máximo entre
1, … , m; j =
1, … , n.
los números Diag Rij , i =
( )
Partición de una región cerrada y acotada
Sean D ⊂ 2 una región cerrada y acotada y R una región rectangular que contiene a D dada por
=
R
{ ( x ; y ) ∈ 2 / a ≤ x ≤ b; c ≤ y ≤ d }
como se muestra en la figura 7.1.3.
Y
d
R
R
D
c
0
a
b
Fig. 7.1.3
468
Cálculo II
X
{
}
Sea P =
[xi −1 ; xi ] × y j −1 ; y j / i =
1, … , m; j =
1, … , n una parti
ción de la región rectangular R (figura 7.1.4).
Y
Rij =
1, … , m; j =
1, … , n
[ xi −1 ; xi ] × y j −1 ; y j , i =
d
yj
R
0
a x1
yj – 1
y1
c
D
xi – 1 xi
b
X
Fig. 7.1.4
Sea RD el conjunto formado por todos los rectángulos de la
partición P que intersecan a la región D, esto es
RD =
{Rij ∈P / Rij ∩ D ≠ φ, i=
1, … , p; j= 1, … , q
}
donde p ≤ m y q ≤ n, pues existe la posibilidad de que algunos de
los rectángulos de P no tengan intersección con la región D.
Una partición de la región D es el conjunto PD dado por
La norma de la partición PD
está dada por el mayor entre los
números Diag Rij , donde
( )
1 ≤ i ≤ p; 1 ≤ j ≤ q
PD =
{Dij / Dij =Rij ∩ D,Rij ∈ P , i =1, … , p; j =1, … , q }
Suma de Riemann
Sean f una función continua en la región cerrada y acotada D,
PD una partición de D y P (µ*i ; ν *j ) un punto seleccionado arbitrariamente en la región Dij ∈ PD , i =
1, … , p; j =
1, … , q.
La suma de Riemann SR de f asociada a la partición PD y a los
( )
*
*
xi
∑ ∑ f (µi ; ν j ) ∆ y j ∆=
i= 1 j= 1
puntos seleccionados P µ*i ; ν *j , i = 1, … , p; j = 1, … , q es
=
SR
p q
q p
(
)
*
*
∑ ∑ f µi ; ν j ∆ xi ∆ y j
j= 1i= 1
Definición 1. Integral doble
Sean f una función continua en la región cerrada y acotada D ⊂ 2 ,
PD una partición de D y P µ*i ; ν *j un punto seleccionado arbitra-
(
)
riamente en la región Dij ∈ PD , i =
1, … , p; j =
1, … , q. La integral
doble de f sobre la región D es el límite de la suma de Riemann SR
cuando la norma de la partición PD tiende a cero y se escribe
∫∫
D
=
f ( x; y) dA
PD
p q
∑∑ f (µi* ; ν*j ) ∆ y j ∆ xi
→0
lim
i= 1 j= 1
Capítulo 7. Integral doble
469
Interpretación geométrica de la integral doble
Sean D una región cerrada y acotada del plano XY, PD una partición
de D y f una función continua en D tal que
f ( x; y ) ≥ 0 , ∀ ( x; y ) ∈ D
El volumen del sólido E ⊂ 3 que se encuentra debajo de la superficie S : z = f ( x; y) y sobre la región D (figura 7.1.5) está dado por
=
V ( E)
∫∫
f=
(x; y) dA
PD
D
p q
∑∑ f (µi* ; ν*j ) ∆ y j ∆ xi
→0
lim
i= 1 j= 1
Z
S : z = f ( x; y )
0
E
Y
X
Fig. 7.1.5
{
}
Si PD =
Dij / Dij =
Rij ∩D ,Rij ∈ P , i =…
1, , p; j =…
1, , q es
una partición de la región D, la suma de Riemann SR de f asociada
(
)
a la partición PD y a los puntos seleccionados P µ*i ; ν *j dada por
=
SR
p q
∑∑ f (µi* ; ν*j ) ∆ y j ∆ xi
i= 1 j= 1
es la suma de los volúmenes de los paralelepípedos rectangulares
cuyas bases son los rectángulos Rij , 1 ≤ i ≤ p , 1 ≤ j ≤ q.
Propiedades de la integral doble
Sean f y g funciones continuas en una región cerrada y acotada
D ⊂ 2 .
1. Si k ∈ , entonces
∫∫ kf (x; y) dA = k ∫∫ f (x; y) dA
D
2.
∫∫ [ f (x; y) ± g (x; y)] dA= ∫∫ f (x; y) dA ±∫∫ g (x; y) dA
D
470
Cálculo II
D
D
D
3. Si f ( x; y) ≥ g ( x; y) , ∀ ( x; y) ∈ D , entonces
∫∫ f (x; y) dA ≥∫∫ g (x; y) dA
D
D
En particular, si f ( x; y) ≥ 0 , ∀ ( x; y)∈ D , entonces
∫∫ f (x; y) dA ≥ 0
D
4. Si m y M son los valores mínimo y máximo absolutos de f en
D, esto es,
m ≤ f ( x; y) ≤ M ; ∀ ( x; y)∈ D
y A ( D) es el área de la región D, entonces
m ( A ( D)) ≤
∫∫ f (x; y) dA ≤ M ( A (D))
D
5. Si D = D1 D2 , donde D1 y D2 son regiones cerradas y que
no se traslapan, entonces
f ( x; y) dA
∫∫=
∫∫ f (x; y) dA +∫∫ f (x; y) dA
D
6.
D1
∫∫ f (x; y) dA ≤ ∫∫
D
D2
f ( x; y) dA
D
Teorema del valor medio
Si f es una función continua en la región cerrada y acotada D, en­
tonces existe un punto (ξ; η)∈ D tal que
∫∫ f (x; y) dA=
D
f (ξ; η)
∫∫ dA=
f (ξ; η) A ( D)
D
Cálculo de una integral doble mediante integrales iteradas
Sea f una función continua en la región D ⊂ 2 . El cálculo de la
integral doble de f sobre D mediante integrales iteradas depende de
la descripción analítica de D, como se muestra a continuación.
Capítulo 7. Integral doble
471
Caso 1
Sea D una región rectangular (figura 7.1.6).
𝑦𝑦Y
𝑑𝑑d
D
𝑐𝑐c
00
𝑎𝑎a
b𝑏𝑏
X
𝑥𝑥
Fig. 7.1.6
Una descripción analítica de la región D es
=
D
{ ( x ; y ) ∈ 2 / a ≤ x ≤ b; c ≤ y ≤ d }
Luego, la integral doble de f sobre D se expresa en términos de
integrales iteradas de la siguiente manera
∫∫
=
f ( x; y) dA
D
b d
=
f ( x; y) dy dx
a
c
∫ ∫
b
d
a
c
∫ ∫
f ( x; y) dydx
Así, para calcular la integral doble de f sobre la región D, primero
se calcula la integral
∫
d
c
f ( x; y) dy , en la que x se considera cons-
tante. Luego, este resultado se integra con respecto a x sobre el
intervalo [a; b] .
Como x e y varían independientemente entre constantes, el valor
de la integral doble no cambia cuando en las integrales iteradas se permuta el orden de integración como lo establece el siguiente teorema.
Teorema de Fubini
Si f es una función continua en la región
=
D
∫∫
{ (x; y) ∈ 2 / a ≤ x ≤ b; c ≤ y ≤ d } , entonces
=
f ( x; y) dA
Y
D
D
a
472
Cálculo II
a
c
∫∫
d
b
c
a
∫∫
f ( x; y) dxdy
Caso 2
y = g(x)
Sea D la región del plano descrita analíticamente por
b
Fig. 7.1.7
d
y = h(x)
=
D
0
b
=
f ( x; y) dydx
X
{ ( x ; y ) ∈ 2 / a ≤ x ≤ b; g ( x) ≤ y ≤ h ( x) }
donde g y h son funciones continuas en el intervalo
(figura 7.1.7).
[a; b]
La integral doble de f sobre D, en términos de integrales iteradas,
está dada por
∫∫
=
f ( x; y) dA
D
b
h ( x)
a
g x
b
h ( x)
a
g x
f ( x; y) dy dx
∫
∫=
∫ ∫ ( ) f (x; y) dydx
()
Así, para calcular la integral doble de f sobre la región D, primero
se calcula la integral
h ( x)
∫ ( ) f (x; y) dy
g x
en la que x se considera
constante. Luego, este resultado se integra con respecto a x sobre el
intervalo [ a; b ] .
Caso 3
Sea D, la región del plano descrita analíticamente por
=
D
{ ( x; y ) ∈ 2 / c ≤ y ≤ d; g ( y ) ≤ x ≤ h ( y ) }
donde g y h son funciones continuas en el intervalo
[ c; d ]
(figura 7.1.8).
Y
d
x = h(y)
x = g(y)
D
c
0
Fig. 7.1.8
X
La integral doble de f sobre D, en términos de integrales iteradas,
está dada por
∫∫
=
f ( x; y) dA
D
d h( y)
=
f ( x; y) dx dy
c g ( y)
∫ ∫
d
h( y)
c
g y
∫ ∫ ( ) f (x; y) dxdy
Ejemplo 1
Sea D la región rectangular del plano dada por
=
D
Y
4
{ (x; y) ∈ 2 / −1 ≤ x ≤ 3; 1 ≤ y ≤ 4 }
Calcule
D
2
∫∫ (4xy − 5y ) dA
D
Solución
Como la región D es rectangular, el cálculo de la integral doble
mediante integrales iteradas se realiza integrando primero con
respecto a x y luego con respecto a y, o viceversa. Así, se tiene
1
–1
0
3
X
Fig. 7.1.9
Capítulo 7. Integral doble
473
4 3
∫∫ (4xy − 5y ) dA =∫∫ (4xy − 5y ) dxdy
2
2
D
1 −1
=
=
=
4 3
∫ ∫ (4xy − 5y ) dx dy
1
2
−1
4
3
∫
∫ (16y − 20y ) dy
2 x 2 y − 5y 2 x dy
−1
1
4
2
1
4
2 20 y3
=
− 300
8y −
=
3 1
Ejemplo 2
Sea D la región del plano limitada por las gráficas de las ecuaciones y = x 2 e y = 2x. Calcule
∫∫ 2xy dA
D
Solución
La región D se muestra en la figura 7.1.10.
Y
Para establecer los intervalos de integración se determinan los puntos
de intersección de las gráficas de
4
y = 2x
y = x2 e y = 2x
Así, se tiene
x 2 = 2x ⇔ x ( x − 2) = 0
y = x2
D
⇔ x= 0 ∨ x= 2
0
2
X
Fig. 7.1.10
Una descripción analítica de la región D está dada por
=
D
{ (x; y) ∈ 2 / 0 ≤ x ≤ 2; x2 ≤ y ≤ 2x }
Luego, de acuerdo con el caso 2, al calcular la integral doble
mediante integrales iteradas, se tiene
2
2x
∫∫ (2xy) dA =∫ 0 ∫ x2 (2xy) dydx
D
474
Cálculo II
2x
2x 2 ydy dx
=
0
x
∫
=
2
2
∫(
=
0
∫
∫
2x
y2
2 x dx
0
2 x2
2
Cuando se calcula la primera
integral con respecto a una de
las variables, la otra se considera
como constante.
2
x6
16
4 x − x dx = x 4 −
=
6 0 3
3
5
)
Si la descripción analítica de la región D está dada por
y
=
D ( x; y) ∈ 2 / 0 ≤ y ≤ 4;
≤ x≤ y
2
Y
de acuerdo con el caso 3, al calcular la integral doble mediante
integrales iteradas, se tiene
y
4
∫∫ (2xy) dA = ∫ ∫
0
D
y
2
y
=
D ( x; y) ∈ 2 / 0 ≤ y ≤x4=;
≤ x≤ y
2 y
=
D ( x; y) ∈ 2 / 0 ≤ y ≤ 4;
≤ x =≤ y
2
D
(2xy) dxdy
4
y
=
y 2xydx dy
0
2
∫ ∫
=
∫
4
y
x 2 y y dx
0
2
4
0
y3 y 4
y3
16
= y − dx = − =
0
4
3 16 0 3
∫
4
4
2
2
X
Fig.7.1.11
Ejemplo 3
Sea D la región del plano limitada por las gráficas de las ecua-
=
y
ciones
=
x , y 0 y x = 1. Calcule
∫∫ x
2y
2
D
+1
dA
Solución
La región D se muestra en la figura 7.1.12 y una descripción
analítica está dada por
=
D
{ (x; y) ∈ 2 / 0 ≤ x ≤ 1; 0 ≤ y ≤ x }
Luego, de acuerdo con el caso 2, al calcular la integral doble
mediante integrales iteradas, se tiene
∫∫ x
D
2y
2
+1
dA =
=
=
x
1
∫∫
0
0
2y
x2 + 1
∫
=
y
=
x, y 0
D
0
∫
x
1
dydx
1
2 x
ydy dx
=
2
0 x +1 0
∫
Y
∫
x
y2
dx
0 x2 + 1 2
0
2
1
1
X
Fig.7.1.12
1
1
1
dx ln x 2 + 1=
ln2
=
2
0 x +1
2
0 2
1
(
)
Capítulo 7. Integral doble
475
Ejemplo 4
Sea D la región del plano limitada por las gráficas de las ecuay x=
, x 2 y y = 0. Calcule
ciones=
=
I
∫∫ x sen (2x − y) dA
D
Y
Solución
2
La región D se muestra en la figura 7.1.13 y una descripción analítica está dada por
y=x
=
D
DD
0
2
X
Luego, de acuerdo con el caso 2, al calcular la integral doble
mediante integrales iteradas, se tiene
=
I
Fig. 7.1.13
{ ( x ; y ) ∈ 2 / 0 ≤ x ≤ 2; 0 ≤ y ≤ x }
∫∫
xsen (2x − y)=
dA
D
2
x
0
∫ ∫
=
∫
=
2
0
2
x
0
0
∫∫
x
sen (2x − y) dy dx
=
0
xsen (2x − y) dydx
∫
2
0
x
x [cos( 2 x − y]0 dx
x (cosx − cos2x) dx
u
dv
2
sen2 x
= x senx −
−
2 0
∫
2
senx −
0
sen2 x
dx
2
2
sen4
cos2x
= 2 sen2 −
+ cosx −
2
4 0
Y
4
= 2sen2 − sen4 + cos2 −
D = x; y ) ∈
/ 0 ≤ y ≤x4=;
≤ x≤ y
y
D = ( x; y) ∈ 2 / 0 ≤ y ≤ 4;
≤ x =≤ y
2
D
Ejemplo 5
Sea D la región del plano limitada por las gráficas de las ecuacio=
y lnx
=
, y 0 y x = e. Calcule
nes
Y
0
y = lnx
2
∫∫ 4x e dA
2 y
X
D
D
0
cos4 3
−
4
4
1
e
X
Solución
La región D se muestra en la figura 7.1.14 y una descripción analítica está dada por
Fig. 7.1.14
476
Cálculo II
=
D
{ (x; y) ∈ 2 /1 ≤ x ≤ e; 0 ≤ y ≤ lnx }
Luego, de acuerdo con el caso 2, al calcular la integral doble
mediante integrales iteradas, se tiene
∫∫
4x 2 e y dA =
D
=
=
=
e
lnx
1
0
∫∫
4x 2 e y dydx
e lnx
=
4x 2 e y dy dx
1 0
∫ ∫
e
y lnx
e
0
1
∫
e
4x2
1
∫
lnx
0
e y dy dx
e dx ∫ 4x e − 1 dx
∫ 4x =
∫ 4x [ x − 1] dx= ∫ 4x − 4x dx
2
1
e
e
2
1
lnx
2
3
2
1
e
4
1
4 4 3
=
e 4 − e3 +
x − 3 x =
3
3
1
Cambio en el orden de integración
En algunos casos es muy difícil o incluso hasta imposible calcular una integral doble siguiendo un orden de integración dado. Sin
embargo, a veces, al cambiar el orden de integración se supera esta
dificultad como se muestra en el siguiente ejemplo.
Ejemplo 6
Calcule
=
I
∫ ∫
1
0
1
3
y
2
x3 + 7 y 6 y5 dx dy
Solución
De acuerdo con los límites de las integrales iteradas, la descripción analítica de la región de integración D está dada por
=
D
Y
1
{ (x; y) ∈ 2 / 0 ≤ y ≤ 1; y2 ≤ x ≤ 1}
=
y
La región D se muestra en la figura 7.1.15.
Dado que no es posible determinar la integral
∫
1
y2
3
x = y2
x3 + 7 y 6 y5 dx
D
0
con los métodos de integración estudiados, se invierte el orden
de integración para facilitar el cálculo de la integral doble. Para
este fin se considera la descripción analítica de la región D como
en el caso 2, es decir
=
D
=
x, y 0
1
X
Fig. 7.1.15
{ (x; y) ∈ 2 / 0 ≤ x ≤ 1; 0 ≤ y ≤ x }
Luego,
=
I
1
∫∫
0
1
y
2
3
6 5
x3 + 7 y=
y dx dy
x
1
∫∫
0
0
3
x3 + 7 y 6 y5 dy dx
Y
4
Capítulo 7. Integral doble
477
1
42
=
I
1
42
=
1
=
56
1
∫ (
x3 + 7 y 6
0
)
4/3 x
0
0
3
6
5
∫ ∫ 0 (x + 7y ) (42y dy) dx
1
x
1/ 3
1 3
3
6
∫ 0 4 (x + 7y )
1
dx =
56
∫
1
4/3
x
dx
0
16x 4 − x 4 dx
0
15 1 4
3 5 1 3
x
=
x dx =
56 0
56 0 56
∫
=
Ejemplo 7
Calcule
I=
Y
1
1
0
x
∫∫
(
)
xarctan y 3 + 1 dy dx
De acuerdo con los límites de las integrales iteradas, la descripción analítica de la región de integración D está dada por
=
D
0
1
Solución
y=x
D
1
X
{ (x; y) ∈ 2 / 0 ≤ x ≤ 1; x ≤ y ≤ 1}
La región D se muestra en la figura 7.1.16.
Fig. 7.1.16
Dado que no es posible determinar la integral
∫
1
(
)
xarctan y 3 + 1 dy
x
con los métodos de integración estudiados, se invierte el orden
de integración para facilitar el cálculo de la integral doble. Para
este fin se considera la descripción analítica de la región como
en el caso 3, es decir
=
D
{ (x; y) ∈ 2 / 0 ≤ y ≤ 1; 0 ≤ x ≤ y }
Luego,
=
I
Y
4
Y
=
1
/ 0 ≤ y ≤x4=;
D = x; y ) ∈
≤ x≤ y
y
D = ( x; y) ∈ 2 / 0 ≤ y ≤ 4;
≤ x =≤ y
2
D
x=0
x=y
=
=
0
0
2 1X
Fig. 7.1.17
478
Cálculo II
X
1
1
0
x
∫∫
∫
1
2
1
(
)
xarctan y3 +=
1 dx dy
(
)∫
arctan y3 + 1
0
∫
1
0
(
)
xdx dy =
0
1
6
y
0
0
∫ ∫ xarctan (y + 1) dxdy
y
2
arctan y3 + 1 y=
dy
1
∫
∫
1
0
y
x2
arctan y3 + 1
0
2 0
1
(
(
)
)
arctan y3 + 1 3y 2 dy
1 2
1
2
=
arctanz dz
[zarctanz]1 −
6 1
6
∫
3
dz
z
2
z
∫ 1+ z
1
2
dz
1
1
2
2 2
[zarctanz]1 − ln 1 + z 1
6
2
(
I
=
2arctan (2) −
=
6
)
π 1 5
− ln
4 2 2
Ejercicios y problemas resueltos 7.1
1.
Calcule las siguientes integrales dobles:
a)
4
∫∫
1
y
+ dxdy
1y
x
2 x
1
∫∫
b)
0
1
xe xy − 9π2 xcos (3πxy) dydx
0
Solución
a) Al calcular la integral iterada, primero con respecto a la variable x y luego con respecto a la variable y, se tiene
I=
I=
4
∫ ∫
1
∫
y
+ dx dy =
1y
x
2 x
1 3
+ yln2 dy =
1 y 2
4
∫
2
x2
+ yln x dy
1 y 2
1
41
3
y2
ln y + (ln2)
2
2
4
21
ln2
=
1 2
b) Al calcular la integral dada, primero con respecto a la variable y y luego con respecto a la variable x, se tiene
=
I
=
=
=
1
0
∫ ∫
0
1
∫ ∫
∫
1
xe xy − 9π2 xcos (3πxy) dy dx
0
e xdy − 3π cos (3πxy) 3πxdy dx
0 u
0
e
du
dv
cos(v)
1
∫
xy
1
1
1
e xy − 3π sen (3πxy) dx
0
0
1
∫ (e
0
x
)
− 3π sen (3πx) − 1 dx
1
= e x + cos (3πx) − x = e − 4
0
Capítulo 7. Integral doble
479
2.
Sea D la región del plano limitada por las gráficas de las ecuax
ciones:
=
y e=
, y e − x=
, y e2 .
a) Grafique la región D en el plano XY .
b) Calcule
∫∫ (2 + 2y) dA
D
Solución
a) La gráfica de la región D se muestra en la figura 7.1.18
Y
8
y = e2
6
4
y=
e−x ⇔ x =
−lny
y = e x ⇔ x = lny
2
0
–2
2
X
Fig. 7.1.18
b) Una descripción analítica de la región D es
=
D
{ (x; y) ∈ 2 / 1 ≤ y ≤ e 2 ; −lny ≤ x ≤ lny }
Luego, de acuerdo con el caso 3, al calcular la integral
doble mediante integrales iteradas, se tiene
u
= lny ,
=
du
dv
=
dy
=
, v
y
( y + 1) dy
( y + 1)2
e2
∫∫ (2 + 2y) dA =∫ 1
I=
D
2
=2
=4
∫
∫
e2
1
e2
1
∫
lny
− lny
(2 + 2 y) dx dy
e2
lny
lny
∫−lny (y + 1) dx dy = 2∫ 1 [ (y + 1) x ]−lny dy
e2
( y + 1)2
4
lny ( y + 1) dy =
lny − 4
2
u
1
dv
(
= 4
2
)
lny
4 + y + ln y
2
4
=3e 4 + 4e 2 + 5
Por lo tanto,
∫∫ (2 + 2y) dA =3e
D
480
Cálculo II
4
+ 4e 2 + 5
∫
e2
1
( y + 1)2 dy
2
y
3.
Sea D la región del plano limitada por las gráficas de las ecuaciones y =
x2/3 , y =
−x2/3 y x =
2.
a) Grafique la región D en el plano XY .
b) Calcule
∫∫
3
9 y 2 e x dA
D
Solución
a) La gráfica de la región D se muestra en la figura 7.1.19.
Y
y = x2/3
2
–6
–4
0
–2
2
4
6 X
y = – x2/3
–2
x=2
Fig. 7.1.19
b) Una descripción analítica de la región D es
=
D
{ (x; y) ∈ 2 / 0 ≤ x ≤ 2; −x2/3 ≤ y ≤ x2/3 }
Luego, de acuerdo con el caso 2, al calcular la integral
doble mediante integrales iteradas, se tiene
∫∫
3
9 y 2 e x dA
=
D
=
2
∫∫
x2 / 3
∫
3
9 y 2 e x dy dx
=
2/3
−x
0
∫
x2 / 3
2
3e x3 y3
=
dx
− x2 / 3
0
= 2
∫
2
(
)
2
2
x
9e
0
∫ 6x e
2 x3
0
2
3
∫
x2 / 3
−x
2/3
y 2 dy dx
dx
(
)
3
x3
8
e
3x 2=
dx 2 e x=
0 2 e − 1
0 u
e
du
Por lo tanto,
∫∫
3
(
)
9y2e x =
dA 2 e8 − 1
D
Capítulo 7. Integral doble
481
4.
Sea D la región del plano limitada por las gráficas de las ecuaciones y =
3
x 3 − 1 , y = 1 y x = 1.
a) Esboce la gráfica de la región D en el plano XY.
b) Calcule
∫∫ 6πx
2
( )
sen πy 2 dA
D
Solución
a) Un esbozo de la gráfica de la región D se muestra en la
figura 7.1.20.
Y
y=1
1
3
y=
0,5
0
1
0,5
–0,5
x3 − 1 ⇔ x=
1,5
2
3
y3 + 1
X
x=1
Fig. 7.1.20
b) Para facilitar el cálculo de la integral doble se elige la siguiente descripción analítica de la región D
=
D
{ ( x; y ) ∈
2
/ 0 ≤ y ≤ 1; 1 ≤ x ≤ 3 y3 + 1
}
Así, al calcular la integral doble de acuerdo con el
caso 3, se tiene
1
I = 6πx 2 sen πy 2 dA =
0
D
( )
∫∫
∫
1
( )
∫ ∫
3 y3 +1
2πx3 sen πy 2
=
1
0
Si J
=
3 y3 +1
1
∫
6πx 2 sen πy 2 dx dy
1
=
u y2 ,
du =
2 y dy ,
( )
1
v=
− cos (πy 2 )
2π
=
dv sen πy 2 ydy
0
∫ y sen (πy ) dy, al aplicar el método de integración
3
2
( πy ) ydy
∫ y sen (πy ) dy= ∫ y sen
3
2
2
u
2
dv
1
1
=
− y 2 cos πy 2 + cos πy 2 ydy
2π
π
( ) ∫ ( )
1
1
=
− y 2 cos πy 2 + 2 sen πy 2 + C
2π
2π
( )
482
Cálculo II
( )
dy =
2π y3 sen πy 2 dy
por partes resulta
=
J
( )
( )
Luego,
1
1
1
I = 2π − y 2 cos πy 2 + 2 sen πy 2 = 1
2
π
0
2π
( )
( )
Por lo tanto,
∫∫ 6πx
2
( )
sen πy 2 dA =
1
D
5.
Sea D la región plana dada por
{ ( x; y ) ∈ 2 /
=
D
x + y ≤ 3 ∧ x2 + y 2 ≤ 9
}
a) Grafique la región D en el plano XY.
∫∫ 6x dA
b) Calcule
D
Solución
a) Dado que
x + y ≤ 3 ⇔ −3 ≤ x + y ≤ 3 ⇔ ( y ≥ − x − 3 ∧ y ≤ 3 − x )
la región D se puede reescribir como
{(x; y) ∈ 2 / ( y ≥ −x − 3
=
D
}
∧ y ≤ 3 − x) ∧ x 2 + y 2 ≤ 9
La gráfica de la región se muestra en la figura 7.1.21.
Y
3
=
y
9 − x2
1
D1
–4
–3
y= 3 − x
2
–2
–1
y =− x − 3
–1
D2
0
–2
1
2
3
4
X
y=
− 9 − x2
–3
Fig. 7.1.21
b) Para calcular la integral doble, se divide la región D en dos
subregiones que no se traslapen tales que D = D1 D2 ,
donde
{ (x; y) ∈ / −3 ≤ x ≤ 0; −x − 3 ≤ y ≤ 9 − x }
=
D { ( x; y) ∈ / 0 ≤ x ≤ 3; − 9 − x ≤ y ≤ 3 − x }
=
D1
2
2
2
2
y
2
Capítulo 7. Integral doble
483
De acuerdo con la propiedad 5 de la integral doble, se tiene
=
I
6x dA
∫∫=
∫∫ 6x dA +∫∫ 6x dA
D
=
=
=
D1
9− x2
0
∫ ∫
− 3
− x −3
D2
6x dy dx +
0
9− x
∫− 3[ 6xy ]−x−3
2
9 − x2
(
)
0
−3
−2 9 − x 2
=
3/ 2
3− x
0 − 9 − x2
6x dy dx
3
3− x
0
− 9− x2
∫ [6xy ] dx
+ 6 x + 18x) dx + (18x − 6 x
∫
dx +
∫ (6 x
3
∫∫
3
2
2
0
0
)
+ 6 x 9 − x 2 dx
(
+ 2x3 + 9x 2 + 9x 2 − 2x3 − 2 9 − x 2
−3
3/ 2 3
)
0
=
−81 + 81 =
0
Por consiguiente,
∫∫ 6x dA = 0
D
6.
Dada la integral doble
I=
0
∫ ∫
−4
− −y
−2
3
e − x dx dy
a) Grafique la región de integración.
b) Cambie el orden de integración y calcule la integral.
Solución
a) De acuerdo con los límites de las integrales iteradas, la
descripción analítica de la región de integración D está
dada por
x = –2
–3
Y
–2 –1
D
0
1
–1
x =− − y ⇔ y =− x 2
–2
–4
–5
Fig. 7.1.22
Cálculo II
y = –4
{ ( x ; y ) ∈ 2 / − 4 ≤ y ≤ 0; − 2 ≤ x ≤ −
−y
}
La región D se muestra en la figura 7.1.22.
b) Para cambiar el orden de integración se considera la descripción analítica de la región D como en el caso 2, es decir
=
D
–3
484
X
=
D
{ (x; y) ∈ 2 / −2 ≤ x ≤ 0; −x2 ≤ y ≤ 0 }
Luego, al calcular la integral doble con los nuevos límites
de integración se tiene
I
=
0
∫ ∫
0
3
e − x dy dx
=
2
−2
−x
0
∫ ∫
−2
0
−x
2
3
e − x dy dx
0
0
1 0 − x3
e − x3 y 2 dx =
I=
e −
x 2
dx
3
−
−x
−2
3 −2 u du
e
∫
∫
3 0
1
1 8
=
− e − x −2 =
e −1
3
3
(
)
Por lo tanto,
0
∫ ∫
=
I
7.
− −y
−4 −2
3
e − x dxdy
=
1 8
e −1
3
(
)
Calcule la integral doble
∫ ∫
0
− ln6
8
1
dy dx
2 + e − x ln ( y − 2)
Solución
Dado que no es posible determinar la integral
∫
8
1
dy
2 + e − x ln ( y − 2)
con los métodos de integración estudiados, se ensaya un cambio en el orden de integración para ver si así se facilita el cálculo de la integral doble.
Así, de acuerdo con los límites de las integrales iteradas dadas, la descripción analítica de la región de integración según
el caso 2, está dada por
=
D
{ (x; y) ∈ 2 / −ln6 ≤ x ≤ 0;
2 + e−x ≤ y ≤ 8
}
Esta región D se muestra en la figura 7.1.23.
Y
8
y=8
7
D
6
5
4
3
y =+
2 e−x ⇔ x =
−ln ( y − 2)
2
x = −ln6
–2
1
–1
0
1
X
Fig. 7.1.23
Capítulo 7. Integral doble
485
Para cambiar el orden de integración se considera la descripción analítica de la región D de acuerdo con el caso 3; esto es
{ (x; y) ∈ 2 / 3 ≤ y ≤ 8; −ln ( y − 2) ≤ x ≤ 0}
=
D
Luego, al calcular la integral doble con los nuevos límites de
integración, se tiene
8 0
1
dx dy
=
3 − ln ( y − 2) ln ( y − 2)
∫∫
I
=
1
8
[x] ( ) dy ∫
∫=
ln ( y − 2)
=
0
− ln y − 2
3
∫
=
8
=
dy
3
8
y ]3
[=
∫
1
3 ln ( y − 2)
8
∫
0
− ln( y − 2)
dx dy
1
0
x]− ln( y − 2) dy
[
3 ln ( y − 2)
8
5
Por lo tanto,
=
8.
0
8
1
=
dydx 5
− ln6 2 + e− x ln ( y − 2)
∫ ∫
Calcule la integral doble
0
∫ ∫
−
π
3
π
3
−y
ln (cos x) cos y dx dy
Solución
Dado que no es posible determinar la integral
∫
π
3
−y
ln (cos x) cos y dx
con los métodos de integración estudiados, se ensaya un cambio en el orden de integración para ver si así se facilita el cálculo de la integral doble.
Luego, de acuerdo con los límites de las integrales iteradas
dadas, la descripción analítica de la región de integración D
según el caso 3, está dada por
π
π
=
D ( x ; y ) ∈ 2 / − ≤ y ≤ 0; − y ≤ x ≤
3
3
Esta región D se muestra en la figura 7.1.24.
Y
π
3
0
D
−
π
3
y = –x
Fig 7.1.24
486
Cálculo II
X
Para cambiar el orden de integración se considera la
descripción analítica de la región D de acuerdo con el caso 2,
es decir
π
D ( x; y) ∈ 2 / 0 ≤ x ≤ ; − x ≤ y ≤ 0
=
3
Así, al calcular la integral doble con los nuevos límites de
integración se tiene
π
0
3
=
ln cos x cos y dydx
0 −x
∫∫
=
I
(
)
π
3 ln cos x sen y 0 dx
=
−x
0
∫
=
)[
(
]
π
3
0
ln (cos x)
∫
π
3
0
∫
∫
0
−x
Cambio de variable
cos ydy dx
z = cos x
dz = −sen z dz
x = 0 → z =1
1
x = π→ z =
3
2
ln (cos x) sen x dx
12
=
− ln cos x −
sen
x
dx =
−
lnz dz
0
1
dz
∫
=
∫
1
1/ 2
∫
1
lnz dz = [zlnz − z]1/ 2 =
ln2 − 1
2
Por lo tanto,
0
π
3 ln
−y
∫ ∫
π
−
3
(cos x) cos y dx dy =
ln 2 − 1
2
Ejercicios y problemas propuestos 7.1
1.
g)
h)
Calcule las siguientes integrales:
y
x
+
dx dy
y + 2 x +1
0
2
−1
1
1
1
a)
∫ ∫
b)
∫ ∫ 4xy − 9x y
c)
0
0
0
4
−2
1
2
2
0
0
∫ ∫
2 2
x
( y + 3)(x + 2)
d)
∫∫
e)
∫ ∫ (e ) dx dy
f)
y
−1
0
1
x2
0
0
y2
x3 + 1 dy dx
∫ ∫
x
−2
0
2
y
0
0
(
)
sen x3 − 1 y dy dx
∫ ∫ (e
2x
)
y 2 dx dy
Sea D la región limitada por las gráficas de
−lnx , y =
lnx y x =
e −3 .
las ecuaciones y =
a) Grafique la región D en el plano XY .
y
dx dy
1+ x
2
b) Calcule
∫∫ 36x
4
dA
D
dx dy
e 2 x cos (πy) − y sen (πxy) dx dy
0
∫∫
+
2.
0
3.
Sea D la región limitada por las gráficas de las
ecuaciones y = x + 4 , y = 4 − x y x =
1
a) Grafique la región D en el plano XY .
b) Calcule
4 y3
∫∫ (x + 1) (x + 1) dA
2
D
Capítulo 7. Integral doble
487
4.
Sea D la región plana dada por
{ ( x; y ) ∈
=
D
2
/ y − x ≤ 4∧ x + y ≤ 4
∫∫ (x
a)
}
D
∫∫16 (y − 1) dA
∫∫ π cos [ π( y
b)
D
5.
3
− 5)]dA , donde D es la
D
Calcule la integral
región del plano XY limitada por las grá­
y
x=
, y 2=
, x 0.
ficas de las ecuaciones=
∫∫ e (6x − 3x ) dA
y
dA , donde D es la región del
+ 4)3
plano XY limitada por las gráficas de las
x y=
, y 0=
, x 2.
ecuaciones=
a) Grafique la región D en el plano XY .
b) Calcule
1
2
2
D
9.
donde la región D está dada por
{ ( x; y ) ∈ 2 / 0 ≤ x ≤ 3 ∧ y − x ≤ 4 }
=
D
6.
donde la región D está dada por
D = D1 D2
7.
=
I
∫∫
0
π/ 4
arctan y
3
2
/ −ln4 ≤ y ≤ 0; e y ≤ x − 1 ≤ e − y
2
/ 0 ≤ y ≤ ln4; e − y ≤ x − 1 ≤ e y
2
}
2
1 + sec x sec x dx dy
a) Grafique la región de integración.
b) Cambie el orden de integración y calcule
la integral.
8.
488
Calcule cada una de las siguientes integrales
dobles seleccionando un orden de integración adecuado.
Cálculo II
−π
a) I
=
Dada la integral
1
−3π
3
y 2 sen y dy dx
sente la suma de las integrales en una sola
integral y calcule su valor.
D
=
D2
x3
10. En cada uno de los siguientes casos, repre-
∫∫ ln (x − 1) dA
{ ( x; y ) ∈
{ ( x; y ) ∈
0
∫ ∫
Calcule la integral doble
=
D1
Calcule la integral
}
0
e4
−4
e− y
∫ ∫
4e
2y
dx dy +
4
∫∫
0 ey
b) I= I1 + I 2 , donde
I1 =
I2 =
πx π
+
2 4
arc tan x
0
∫ ∫
−1
1
π
4
arc tan x
∫∫
0
8
dy dx
2
x +1
8
2
x +1
dy dx
c) I = I1 + I 2 + I3 , donde
I1 =
I2 =
I3 =
−3
2 x +9
−6
−3
0
3
−3
−3
∫ ∫
∫ ∫
3
∫∫
2 y dy dx
2 y dy dx
9− x2
0 − 9− x2
2 y dy dx
e4
4e 2 y dx dy
7.2 Volumen de un sólido en el espacio
3
Z
S : z = f ( x; y )
En esta sección se aplica el concepto de integral doble al cálculo del
volumen de un sólido. Se tratan dos casos: volumen de un sólido
limitado superiormente por una superficie e inferiormente por una
región plana contenida en el plano XY , y volumen de un sólido limitado superior e inferiormente por superficies cualesquiera.
0
Y
D
Caso 1
X
2
Sea f una función continua en el conjunto cerrado y acotado D ⊂ ,
tal que f ( x; y) ≥ 0 para todo ( x; y) ∈ D y sea E el sólido que se encuentra sobre la región D y está limitado superiormente por la gráfica de f (figura 7.2.1), es decir
=
E
E
Fig. 7.2.1
{ ( x; y ; z) ∈ 3 / ( x; y ) ∈ D ∧ 0 ≤ z ≤ f ( x; y ) }
De acuerdo con la interpretación geométrica presentada en la
sección 7.1, el volumen de E está dado por
V ( E) =
∫∫ f (x; y) dA
D
Caso 2
Sean f y g funciones continuas en el conjunto cerrado y acotado
D ⊂ 2 , tal que f ( x; y) ≥ g ( x; y) para todo ( x; y) ∈ D , y sea E el
sólido que está limitado superiormente por la gráfica de f e inferiormente por la gráfica de g, tal que la proyección ortogonal del sólido
sobre el plano XY es la región D (figura 7.2.2), es decir
=
E
Z
z = f ( x; y )
{ (x; y; z) ∈ 3 / (x; y) ∈ D ∧f (x; y) ≤ z ≤ g (x; y) }
De acuerdo con el caso 1, el volumen del sólido E es la diferencia
=
V ( E)
∫∫ f (x; y) dA −∫∫ g (x; y) dA
D
z = g ( x; y )
0
D
Luego, el volumen del sólido E está dado por
=
V ( E)
E
∫∫ [ f (x; y) − g (x; y)] dA
D
Y
D
X
Fig. 7.2.2
Ejemplo 1
Calcule el volumen del sólido E que está bajo la superficie
S : z = f ( x; y) = 6 − x − y , y sobre la región D del plano XY limitada por las gráficas de las ecuaciones x + y= 3, y= 0 y x= 0.
Capítulo 7. Integral doble
489
Solución
El sólido E y su proyección ortogonal sobre el plano XY se muestran en las figuras 7.2.3 y 7.2.4.
Z
6
Y
z=6–x–y
3
E
0
x+y=3
D
3
3
D
Y
0
x+y=3
X
3
Fig. 7.2.3
X
Fig. 7.2.4
Una descripción analítica de la región D es
=
D
{ (x; y) ∈ 2 / 0 ≤ x ≤ 3; 0 ≤ y ≤ 3 − x }
Así, el volumen del sólido E que se encuentra bajo el plano de
ecuación z = 6 − x − y y sobre la región D está dado por
V ( E=
)
∫∫ (6 − x − y) dA=
∫
0
0
3− x
y2
6 y − xy −
0
2 0
3
3− x
∫∫
D
=
3
=
dx
(6 − x − y) dy dx
∫
27
x2
− 6 x + dx
0 2
2
3
3
27 x
x3
=
− 3x 2 +
= 18
6 0
2
Por lo tanto, el volumen del sólido E es 18u3 .
Ejemplo 2
Calcule el volumen del sólido E que está bajo la superficie
S : z =f ( x; y) =7 − x 2 − y 2 , sobre el plano P1 : z = 3 y limitado
lateralmente por los planos coordenados XZ, Y Z y el plano
P2 : x + y =
2.
Solución
La superficie S : z =7 − x 2 − y 2 es un paraboloide circular de
vértice en el punto V (0; 0; 7) que se abre hacia abajo. La traza
de S con el plano P1 : z = 3 es la curva C : x 2 + y 2 = 4, z= 3. El
490
Cálculo II
sólido E, cuyo volumen se desea calcular, está limitado superiormente por el paraboloide S, inferiormente por el plano P1 : z = 3
y lateralmente por los planos coordenados XZ, YZ y el plano
P2 : x + y =
2.
La proyección ortogonal del sólido E sobre el plano XY se
muestra en la figura 7.2.5.
Y
2
x2 + y2 = 4
1
x+y=2
D
–2
0
–1
2
1
X
–1
–2
Fig. 7.2.5
Una descripción analítica de la región D es
=
D
{ ( x ; y ) ∈ 2 / 0 ≤ x ≤ 2; 0 ≤ y ≤ 2 − x }
Así, el volumen del sólido E, de acuerdo con el caso 2, está
dado por
V ( E=
)
∫∫ (7 − x
2
)
− y 2 − 3 dA
D
=
=
2
2− x
0
0
∫ ∫ (4 − x
∫
2
)
− y 2 dy dx
2− x
y3
4 y − x y −
0
3 0
2
2
dx=
4
3
∫
2
4 − 3x 2 + x3 dx
0
2
4
x4
16
3
=
−
+
4
x
x
=
3
4 0 3
Por lo tanto, el volumen del sólido E es 16 / 3u3 .
Capítulo 7. Integral doble
491
Área de una región plana
Sea f la función constante definida en una región cerrada y acotada
D, tal que f ( x; y) = 1. El área de la región D está dada por
A ( D) =
∫∫1dA
D
De acuerdo con la interpretación geométrica dada en la sección 7.1, esta integral doble representa el volumen de un sólido
E de base D y altura constante igual a 1. Por esta razón, el volumen
del sólido E coincide numéricamente con el área de la región D.
Ejemplo 3
Calcule el área de la región plana D limitada por las gráficas de
x 2 y − 4.
las ecuaciones: x= 4 − y 2 y =
Solución
Los puntos de intersección de la
parábola y la recta se determinan
al resolver el sistema
La gráfica de la región D se muestra en la figura 7.2.6
Y
2
x= 4 − y
x 2y − 4
=
4
2
Por igualación, se tiene
4 − y2 = 2y − 4 ⇔ y2 + 2y − 8 = 0
⇔ y=
−4 ó y =
2
–10
–12
–8
–6
–4
0
4
2
–2
Luego, los puntos de intersección
son:
P (−12; − 4) y Q (0; 2) .
–2
Q
–4
P
Fig. 7.2.6
Una descripción analítica de la región D es
=
D
{ (x; y) ∈ 2 / −4 ≤ y ≤ 2; 2y − 4 ≤ x ≤ 4 − y2 }
Luego, el área de la región D está dada por
∫∫
=
A ( D)
D
=
2
4− y2
−4
2 y−4
1=
dx dy
∫
2
2
)
2
Por lo tanto, el área de la región D es 36 u2 .
492
Cálculo II
2
4− y
x]2 y − 4
[
−4
y3
8 − 2 y − y dy = 8 y − y 2 − = 36
3 −4
∫ (
−4
2
∫ ∫
=
1dA
X
Integrales dobles en coordenadas polares
El cálculo de algunas integrales dobles se facilita al hacer el cambio
de variable de coordenadas cartesianas a coordenadas polares. Esta
situación se presenta en particular cuando el integrando contiene
expresiones de la forma x 2 + y 2 y la región de integración es un
círculo o parte de él.
El sistema de coordenadas polares está formado por un origen O
(punto fijo) llamado polo y una semirrecta orientada trazada desde
el polo hacia la derecha en forma horizontal que se denomina eje
polar. En este sistema, a cada punto P del plano se le asigna un par
ordenado de números reales (r; θ) llamado coordenadas polares
del punto P, donde r es la distancia dirigida de O a P y θ es la medida en radianes del ángulo orientado cuyo lado inicial es el eje polar
y cuyo lado terminal es el segmento OP (figura 7.2.7)
A’
P (r; θ)
r
θ
O
Eje polar
Fig. 7.2.7
Nota 1
Para asociar las coordenadas polares a un punto se tienen las
siguientes condiciones:
a) Si el ángulo orientado se mide en el sentido antihorario, se
considera que θ es positivo, en caso contrario es negativo.
b) La semirrecta OA′ que se denomina eje θ es el lado terminal
del ángulo que mide θ rad y cuyo lado inicial es el eje polar. El
sentido positivo del eje θ es OA′. Así, el número r es positivo
si P pertenece al eje θ, y es negativo si P está en la prolongación del eje θ.
Ejemplo 4
Ubique los siguientes puntos en el sistema de coordenadas
polares
π
π
π
A 3; , B 2; − , C −3; , D (−1; π )
6
6
3
Capítulo 7. Integral doble
493
Solución
La figura 7.2.8 muestra los cuatro puntos en el sistema de coordenadas polares.
3
π
A 3;
3
2
1
–3
–2
0
–1
D (−1; π)
0
1
–1
π
C −3;
6
2
3
Eje polar
–2
–3
Fig. 7.2.8
Relación entre las coordenadas polares y las cartesianas
Y
y
Sea P un punto del plano cuyas coordenadas rectangulares y polares son ( x; y) y (r ; θ) respectivamente. De la figura 7.2.9, de las
relaciones trigonométricas y del teorema de Pitágoras, se tiene
P (r ; θ) ≡ P ( x; y)
y
θ
O
Eje polar
x
Fig. 7.2.9
X
y
=
tan=
θ
x r cos θ,
x
2
2
y =
θ
=
+
r
sen
,
r
x
y2
Ejemplo 5
a) Halle las coordenadas rectangulares de los puntos A (2; 2π) y
(
)
B − 2 ; π/ 4 dados en coordenadas polares.
b) Determine las coordenadas polares de los puntos C (−2; 2) y
D
(
)
3 ; 1 dados en coordenadas rectangulares.
Solución
a) Al pasar las coordenadas polares de los puntos A y B a coordenadas rectangulares x e y, resulta
=
2π) 2
x 2cos (=
Para el punto A :
=
y
2
sen
=
(2π) 0
494
Cálculo II
⇒ A (2; 0)
x =
− 2 cos (π/ 4) =
−1
Para el punto B :
− 2 sen (π/ 4) =
−1
y =
⇒ B (−1; −1)
b) Al pasar las coordenadas rectangulares de los puntos C y D a
coordenadas polares r e θ, se tiene
Para el punto C:
2
= −1 ⇒ θ = 3π/ 4
tan θ =
−2
⇒ C 2 2 ; 3π/ 4
r 2 =(−2)2 + (2)2 =8 ⇒ r =2 2
(
)
Para el punto D:
1
tan θ = 3 ⇒ θ = π/ 6
r 2 = 3 2 + (1)2 = 4 ⇒ r = 2
⇒ D (2; π/ 6)
( )
Ejemplo 6
En los siguientes ejercicios utilice coordenadas polares para
describir analíticamente la región plana dada. Todas las re‑
giones están limitadas por circunferencias.
a)
b)
c)
Y
Y
Y
6
3
0
2
0
X
4
3
X
–2
–3
0
–4
X
Fig. 7.2.10
Solución
a) La ecuación cartesiana de la circunferencia de centro en el
origen de coordenadas y radio de longitud 3 es
C :x 2 + y 2 =
9
=
x r cos θ
se tiene
Al hacer el cambio de variable
=
y r sen θ
(rcos θ)2 + (r sen θ=
)2
⇔ r2 = 9
⇔
9
(
)
⇔ r 2 cos2 θ + sen2=
θ 9
r=
±3
Capítulo 7. Integral doble
495
En coordenadas polares las ecuaciones r = 3 ó r = −3
representan la circunferencia con centro en el polo y radio de
longitud 3.
3
0
Por consiguiente, una descripción analítica de la región D
en coordenadas polares es
X
=
D
–3
Y
}
C1 : r = 2 y C2 : r = 4
r=2
D
3π / 2 ≤ θ ≤ 2π, 0 ≤ r ≤ 3
b) De manera similar a la parte a), las ecuaciones de las circunferencias concéntricas de radios de longitudes 2 y 4, en coordenadas polares son respectivamente
r=4
2
0
{ (r; θ) ∈ 2 /
Por lo tanto, una descripción analítica de la región D es
4
=
D
X
–2
{ (r; θ) ∈ 2 /
0 ≤ θ ≤ 2π , 2 ≤ r ≤ 4
}
c) La ecuación cartesiana de la circunferencia de centro en el
punto C (0; 3) y radio de longitud 3 es
–4
C3 : x 2 + ( y − 3)2 =
9
Al transformar esta ecuación a coordenadas polares
se tiene
Y
6
D
=
r 6sen θ
(r cos θ)2 + (r sen θ − 3)2 = 9
(
3
0
)
⇔ r 2 cos2 θ + sen2 θ − 6rsen θ + 9= 9 ⇔ r (r − 6sen θ)= 0
Luego, la ecuación de la circunferencia de centro en el punto
C (0; 3) y radio de longitud 3, en coordenadas polares, es
X
Fig. 7.2.11
C3=
: r 6sen θ
Por consiguiente, una descripción analítica de la región
D es
=
D
θ =θ1 , θ = θ2 , r = g (θ) y r = h (θ)
{ (r; θ) ∈ 2 /
0 ≤ θ ≤ π, 0 ≤ r ≤ 6sen θ
}
θ =θ1 , θ =Nota
θ2 , r =2g (θ) y r = h (θ)
θ =θ1 , θ = θ2 , r = g (θ) y r = h (θ)
θ =θ1 , θ = θ2 , r = g (θ) y r = h (θ) En general, cuando una región plana D (figura 7.2.12) está limitada
por las gráficas de las ecuaciones en coordenadas polares
0
Eje polar
θ =θ1 , θ = θ2 , r = g (θ) y r = h (θ)
una descripción analítica de esta región está dada por
=
D
Fig. 7.2.12
496
Cálculo II
{ (r; θ) ∈ 2 /
θ1 ≤ θ ≤ θ2 , g (θ) ≤ r ≤ h (θ)
}
Jacobiano de una función de dos variables
Para hacer un cambio de variables en integrales dobles se utiliza
un teorema que requiere del concepto de jacobiano que se define a
continuación.
=
Sea T una función con Dom (T
) D* ⊂ 2 y Ran (T=) D ⊂ 2 ,
cuya regla de correspondencia está dada por
T (u; v) = ( x; y)
donde x = T1 (u; v) e y = T2 (u; v) definen funciones reales de dos
variables.
La matriz jacobiana de la función T en cualquier punto (u; v) ∈ D*
está dada por
∂x
MT (u; v) = ∂u
∂y
∂u
∂x
∂v
∂y
∂v
El determinante de la matriz jacobiana se llama determinante
jacobiano o simplemente jacobiano de la función T y se denota por
∂ ( x; y )
JT (=
u; v)
=
∂ (u; v)
∂x ∂x
∂x ∂y ∂x ∂y
∂u =
∂v
−
∂y ∂y
∂u ∂v ∂v ∂u
∂u ∂v
Ejemplo 7
Determine la matriz jacobiana y el jacobiano de la función T
dada por
T=
(u; v)
(uv; u2 + v2 )
Solución
x uv , =
y u2 + v 2 . La matriz jacobiana de la función T en
Sean =
cualquier punto (u; v) ∈ 2 es
∂x ∂x
∂u ∂v v u
=
MT (u; v) =
∂y ∂y 2u 2v
∂u ∂v
El jacobiano es el determinante de la matriz jacobiana, es decir
∂ ( x; y )
JT (u;=
v)
=
∂ (u; v)
∂x
∂u
∂y
∂u
∂x
v
∂=
∂y
∂v
v
u
= 2v 2 − 2u2
2u 2v
Capítulo 7. Integral doble
497
Ejemplo 8
Halle el jacobiano de la función T dada por
T (r ; =
θ)
(r cos θ; r sen θ)
Solución
Sean x = r cos θ, y = r sen θ . El jacobiano de la función T en cualquier punto (r; θ) ∈ 2 es
∂ ( x; y )
JT =
(r ; θ) =
∂ (r ; θ)
∂x ∂x
∂r =
∂θ
∂y ∂y
∂r ∂θ
cos θ −r sen θ
sen θ r cos θ
2
= r cos2 θ + r sen
=
θ r
Cambio de variables en integrales dobles
Sea T una función con Dom (T ) = D* ⊂ 2 y Ran (T=
) D ⊂ 2 , cuya
regla de correspondencia está dada por
T (u; v) = ( x; y)
donde x = T1 (u; v) e y = T2 (u; v) definen funciones reales de dos
variables.
Sea f una función continua de dos variables con Dom ( f=
) D ⊂ 2
tal que z = f ( x; y) (figura 7.2.13).
v
T
Y
f
D*
0
D
Ran (T=
) D ⊂ 2 ,
(x; y)
(u; v)
u
0
X
z= f(x; y)
0
Fig. 7.2.13
Para determinar la integral doble de la función f sobre la región
cerrada y acotada D mediante un cambio de variable se aplica el
siguiente teorema.
Teorema 1. Cambio de variable en una integral doble
Sea f una función continua en la región D ⊂ 2 y sea T una función inyectiva que asigna a cada punto (u; v) ∈ D* ⊂ 2 el punto
(x; y) ∈ D ⊂ 2 mediante la regla de correspondencia
498
Cálculo II
T (u; v) = ( x; y)
donde x = T1 (u; v) e y = T2 (u; v) definen funciones reales de dos
variables.
Si T es una función diferenciable en todo punto (u; v) ∈ D y
JT (u; v) ≠ 0, entonces
*
∫∫ f (x; y) dA = ∫∫ f (T (u; v)) J
T
D
Donde
dA = JT (u; v) dudv
(u; v) dudv
D*
Nota 3
Un caso particular se da cuando se hace un cambio de variables
de coordenadas cartesianas a coordenadas polares. En este caso
=
x r cos θ, =
y r sen θ y T (r ; θ=
) (x; y=) (r cos θ; r sen θ) , de donde el
jacobiano es
∂ ( x; y )
JT =
(r ; θ) =
∂ (r ; θ)
∂x ∂x
∂r =
∂θ
∂y ∂y
∂r ∂θ
cos θ −r sen θ
sen θ r cos θ
2
= r cos2 θ + r sen
=
θ r
Luego,
dA
(r ; θ) dr dθ
∫∫ f (x; y)=
∫∫ f (r cos θ; r sen θ) J
T
D
D*
=
r
∫∫ f (r cos θ; r sen θ) r dr dθ
D*
donde D es la región de integración en coordenadas cartesianas y
D* es la misma región expresada en coordenadas polares.
Y
Ejemplo 9
r=3
Calcule la integral doble
∫∫
D
9 − x 2 − y 2 dA
r=2
D
donde D es la región del plano definida por
=
D
{ ( x; y ) ∈ 2 /
4 ≤ x2 + y 2 ≤ 9
}
Solución
La figura 7.2.14 muestra la región D de integración.
2
0
3
X
0
Fig.7.2.14
Capítulo 7. Integral doble
499
Una descripción analítica de la región D en coordenadas
polares es
{ (r; θ) ∈ 2 /
=
D
0 ≤ θ ≤ 2π , 2 ≤ r ≤ 3
}
Así, de acuerdo con la nota 3, al reemplazar x = r cos θ, y = r sen θ
x = r cos θ, y = r sen θ y como r > 0, se tiene
∫∫
=
I
9 − x 2 − y 2 dA
D
=
=
∫ ∫
2π
3
0
2
2π
∫ ∫
3
0
2
1
3
2π
=−
Z
2
9 − r 2=
r dr dθ
∫ (
0
2
9 − (rcos θ) − (rsen θ) r dr dθ
9 − r2
3/ 2 3
)
2
2 π −1
3
53/ 2
3
2π
2
∫ 0 2 ∫ 2 (9 − r )
dθ =
∫
0
1/ 2
(−2r ) dr dθ
53/ 2
10 5 π
dθ =
(2π) =
3
3
Ejemplo 10
Calcule el volumen del sólido E limitado por las superficies
cuyas ecuaciones son
z =4 − x 2 − y 2 ,
Y
z =x 2 + y 2 − 4
Solución
Las gráficas de las ecuaciones corresponden a dos paraboloides
circulares
X
S1 : z = 4 − x 2 − y 2 ⇔ − ( z − 4) = x 2 + y 2 ,
S2 : z = x 2 + y 2 − 4 ⇔ z + 4 = x 2 + y 2 ,
Fig.7.2.15
C : x 2 + y 2 = 4 , z = 0.
El sólido E está limitado superiormente por S1 e inferiormente por S2 , y su proyección ortogonal sobre el plano XY es el
círculo de centro en (0; 0) y radio de longitud 2, como se muestra
en la figura 7.2.16.
D
0
0
2
X
Luego, el volumen del sólido limitado por estas superficies
está dado por
V=
Fig.7.2.16
500
Cálculo II
V2 (0; 0; − 4)
La intersección de estos paraboloides es una circunferencia de
centro en el origen y radio de longitud 2, esto es
Y
–2
V1 (0; 0; 4)
∫∫ (4 − x
D
2
) (
)
− y 2 − x 2 + y 2 − 4 dA=
∫∫ (8 − 2x
D
2
)
− 2 y 2 dA
Al cambiar a coordenadas polares x = r cos θ, y = r sen θ, una
descripción analítica de la región D es
=
D
{ (r; θ) ∈ 2 /
0 ≤ θ ≤ 2π , 0 ≤ r ≤ 2
}
Luego, la expresión del volumen en coordenadas polares es
V=
∫∫ (8 − 2x
2
)
− 2 y 2 dA
D
=
=
2π
∫ ∫
2
0
0
2π
2
0
0
8 − 2 (rcos θ)2 − 2 (rsen θ)2 r dr dθ
∫ ∫ (8r − 2 r ) dr dθ= ∫
3
0
2
r4
4
r
−
dθ= 16π
2 0
2π
2
Por lo tanto, el volumen del sólido E es 16 π u3.
Ejercicios y problemas resueltos 7.2
1.
Calcule el volumen del sólido E que está bajo la superficie
S : z =f ( x; y) =4 − x 2 − y 2 y sobre la región D del plano XY
y x=
, y 1 y=
x 0.
limitada por las gráficas de las ecuaciones=
Solución
El sólido E y su proyección ortogonal sobre el plano XY se
muestran en las figuras 7.2.17 y 7.2.18.
Y
Z
1
4
D
y=x
1
0
1
Y
0
1
X
X
Fig. 7.2.17
Fig. 7.2.18
Una descripción analítica de la región D es
=
D
{ (x; y) ∈ 2 / 0 ≤ x ≤ 1; x ≤ y ≤ 1}
Capítulo 7. Integral doble
501
Así, el volumen del sólido E está dado por
V ( E)=
1
1
2
2
2
2
∫∫ (4 − x − y ) dA= ∫ 0 ∫ x (4 − x − y ) dy dx
D
=
y3
4−x y−
0
3
1
∫ (
2
)
1
=
dx
x
∫
4 3
11
x − x 2 − 4x + dx
0 3
3
1
1
x 4 x3
11
5
= − − 2x 2 + x =
3
3 0 3
3
Por lo tanto, el volumen del sólido E es
2.
5 3
u .
3
Calcule el volumen del sólido E limitado por las superficies
S1 : z =−
6 4 x 2 − 4 y 2 , S2 : z =
2x2 + 2 y 2 .
Solución
Las gráficas de las ecuaciones corresponden a dos paraboloides
circulares
S1 : − ( z − 6)= 4 x 2 + 4 y 2 ,
S2 =
: z 2x2 + 2 y 2 ,
V1 (0; 0; 6)
V2 (0; 0; 0)
La intersección de estos paraboloides es una circunferencia
de centro en el origen y radio de longitud 1, esto es
C : x 2 + y 2 = 1, z = 2.
El sólido E está limitado superiormente por S1 e inferiormente por S2 , y su proyección ortogonal sobre el plano XY
es el círculo de centro en el origen y radio de longitud 1, como
se muestra en las figuras 7.2.19 y 7.2.20.
Z
Y
6
1
S1 : z =−
6 4x2 − 4 y 2
D
2
S2 =
: z 2 x2 + 2 y 2
0
0
0
Y
X
Fig. 7.2.19
502
Cálculo II
Fig. 7.2.20
1
X
Dado que la región de integración es un círculo, conviene
hacer un cambio de variables a coordenadas polares para facilitar el cálculo de la integral doble.
Así, una descripción analítica de la región D en coordenadas polares es
=
D
{ (r; θ) ∈ 2 / 0 ≤ θ ≤ 2π; 0 ≤ r ≤ 1}
Luego, el volumen del sólido E está dado por
∫∫ (6 − 4x
V ( E)=
2
) (
)
− 4 y 2 − 2x 2 + 2 y 2 dA
D
=
∫∫
=
6 1 − x 2 − y 2 dA
D
= 6
∫
1
2π r 2
0
2π 1
∫ ∫ 6 1 − r r dr dθ
0
r4
− dθ = 6
4 0
2
∫
2
0
2π 1
0
dθ = 3π
4
Por lo tanto, el volumen del sólido E es 3π u3 .
3.
Utilice coordenadas polares para calcular la integral doble
∫∫ (x
2
)
+ y 2 dA
D
donde D es la región del plano limitada por las gráficas de las
y x=
, x 0 e y = 1.
ecuaciones=
Solución
La figura 7.2.21 muestra la región D de integración.
La recta y = 1 en coordenadas
polares tiene como ecuación
Y
r sen θ= 1 ⇔ r= csc θ .
1
D
y=x
0
1
X
Fig. 7.2.21
Una descripción analítica en coordenadas polares de la
región D es
π
π
=
D (r ; θ) ∈ 2 / ≤ θ ≤ , 0 ≤ r ≤ csc θ
4
2
Capítulo 7. Integral doble
503
Luego, al reemplazar x = r cos θ, y = r sen θ, y =
dA rdrd θ en
la integral doble, se tiene
∫∫ (x
I=
2
2
∫ ∫
)
+ y dA =
D
=
∫
1
=
4
π
2
π
4
r 4
1
dθ
=
4
4 0
∫
π
2
π
4
csc θ
1
=
4
∫
π
2
π
4
2
csc θ dθ −
3
36 cm
2 10 cm
Fig. 7.2.22
∫
π
2
π
4
csc θ
0
r 2 . rdr d θ
csc 4 θ dθ
(1 + cot 2θ) csc2θ dθ
cot
1
=
I
− cot θ −
4
3
4.
π
2
π
4
∫
2
2
θ
−
θ
θ
cot
csc
d
u2
du
π
2
π
4
(
)
π
θ 2 1
=
π 3
4
La superficie de un adorno para sala es parte de un paraboloide circular cuya base es un círculo de radio 10 cm, como se
muestra en la figura 7.2.22. Calcule el volumen del espacio que
encierra el adorno.
Solución
El adorno E ubicado en un sistema de coordenadas tridimensional, cuyo origen de coordenadas coincide con el centro de la
base del adorno se muestra en la figura 7.2.23.
Z
36
36 cm
2
10 cm
X
Y
Fig. 7.2.23
Dado que el adorno tiene la forma de un paraboloide
circular de altura 36 cm, su ecuación es de la forma
(
z −=
36 a x 2 + y 2
504
Cálculo II
)
… (∗)
Además, como la base es un círculo de radio 10 cm, la traza
del paraboloide con el plano XY tiene por ecuación
2
x 2 + y=
100, =
z 0
Al reemplazar estas expresiones en (∗), se tiene
0=
36 + 100a ⇒ a =
−
9
25
Así, la ecuación del paraboloide es
Y
9 2
x + y2
25
10
(
z =−
36
)
y su proyección ortogonal sobre el plano XY se muestra en la
figura 7.2.24.
Una descripción analítica de la región D en coordenadas
polares es
=
D
D
0
10
X
0
{ (r; θ) ∈ 2 / 0 ≤ θ ≤ 2π; 0 ≤ r ≤ 10 }
Luego, al reemplazar x = r cos θ, y = r sen θ, y =
dA rdrd θ en
la expresión del volumen del espacio que encierra el adorno E,
se tiene
V ( E) =
∫∫
D
9 2
2
36 − 25 x + y
(
=
=
∫
∫
) dA
9 2
36 − 25 r r dr d θ
2 π 10
∫ ∫
=
Fig. 7.2.24
0
0
10
9r 4
18r −
dθ
100 0
2π
0
2
2π
0
900=
d θ 1800 π
Por lo tanto, el espacio del volumen que encierra el adorno
E es 1800 π cm 3 .
5.
Calcule la integral doble
∫∫
9x 2 + 16 y 2 dA
D
donde D es la región limitada por la elipse de ecuación
x2 y 2
+
=
1
16 9
Capítulo 7. Integral doble
505
Solución
En la figura 7.2.25 se muestra la región de integración D.
Y
2
2
x2 y 2
x y
+
=1 ⇔ + =1
16 9
4 3
3
Al hacer el cambio de variable
y
x
= r cos θ,
= rsen θ
4
3
4
0
4
X
0
se tiene
x= 4r cos θ , y= 3r sen θ
Fig. 7.2.25
Al sustituir x= 4r cos θ, y= 3r sen θ, el jacobiano de la transformación T en cualquier punto (r; θ) ∈ 2 es
∂ ( x; y )
JT (=
r ; θ)
=
∂ (r ; θ)
∂x ∂x
∂r =
∂θ
∂y ∂y
∂r ∂θ
4cos θ − 4r sen θ
3sen θ 3r cos θ
= 12r cos2 θ + 12r =
sen2 θ 12r
Una descripción analítica en coordenadas polares de la región D es
{ (r; θ) ∈ 2 /
=
D
}
0 ≤ θ ≤ 2π , 0 ≤ r ≤ 1
Luego, al reemplazar x= 4r cos θ, y= 3r sen θ, y
=
dA 12rdrd θ,
se tiene
I=
∫∫
9x 2 + 16 y 2 dA =
D
=
2π 1
∫ ∫
0
∫ ∫
θ 48
144r 2 dr d =
0
2π 1
0
∫
2π
0
0
12r .12rdr d θ
1
2π
r 3 d=
0 θ 48 [θ]0
= 96 π
6.
Sea D la región del primer cuadrante del plano XY limitada
por las gráficas de las ecuaciones
x = 0 , y = x , x 2 + y 2 = 1, x 2 + y 2 = 4.
Calcule
xye x
∫∫ x
D
506
Cálculo II
2
2
+ y2
+ y2
dA
Solución
En la figura 7.2.26 se muestra la región de integración D.
Una descripción analítica de la región D en coordenadas
polares es
π
π
D (r ; θ) ∈ 2 / ≤ θ ≤ ; 1 ≤ r ≤ 2
=
4
2
Luego, al reemplazar x = r cos θ, y = r sen θ, y =
dA rdrd θ,
se tiene
I=
xye x
=
=
=
+ y2
∫∫ x
2
+y
π
2
2
(rcos θ)(rsen θ) e r
π
4
1
π
2
2
π
4
1
D
=
2
∫∫
∫∫
∫
∫
π
2
π
4
π
2
π
4
2
Y
2
1
0
D
1
2
X
Fig. 7.2.26
dA
2
r2
(r dr dθ)
2
e r r sen θcos θ dr dθ
sen θcos θ
∫
2
2
e r r dr dθ
1
2
er2
sen θcos θ dθ
2
1
e4 − e
=
2
∫
π
2
π
4
sen θ cos θ d θ
π
e 4 − e sen2 θ 2 e 4 − e 1 e 4 − e
=
=
=
8
2 2 π 2 4
4
7.
Calcule el volumen del sólido E limitado inferiormente por
S=
1:z
3x 2 + 3y 2 y superiormente por S2 : x 2 + y 2 + z 2 =
16.
Solución
El sólido E y su proyección ortogonal sobre el plano XY se
muestran en las figuras 7.2.27 y 7.2.28.
Capítulo 7. Integral doble
507
Z
S2 : x 2 + y 2 + z 2 =
16.
4
S=
1:z
0
3x 2 + 3y 2
Y
X
Fig. 7.2.27
Las gráficas de S1 y S2 corresponden a un semicono elíptico
y a una esfera cuyas ecuaciones son
S1=
:z
3x 2 + 3y 2 ,
S2 : x 2 + y 2 + z 2 =
16,
La intersección de las superficies
S1 y S2 es
z 2 = 3x 2 + 3y 2 =16 − x 2 − y 2
⇔ x 2 + y 2 =4 ∧ z =2 3
V1 (0; 0; 0)
C (0; 0; 0)
La intersección de estas superficies es una circunferencia de centro en el origen y radio de longitud 2, esto es
C : x 2 + y 2 = 4 , z = 2 3.
El sólido E está limitado superiormente por S2 e inferiormente por S1, y su proyección ortogonal sobre el plano XY
es el círculo de centro en (0; 0) y radio de longitud 2, como se
muestra en la figura 7.2.28.
Y
2
D
0
2
X
0
Fig. 7.2.28
Dado que la región de integración es un círculo, conviene
hacer un cambio de variables a coordenadas polares para facilitar el cálculo de la integral doble.
Así, una descripción analítica de la región D en coordenadas polares es
=
D
508
Cálculo II
{ (r; θ) ∈ 2 / 0 ≤ θ ≤ 2π; 0 ≤ r ≤ 2 }
Luego, el volumen del sólido E está dado por
V=
(E)
∫∫ 16 − x
2
D
2π
2
0
0
2π
1
−
0 2
=
∫ ∫
=
∫ ∫
0
=
∫
16 − r 2 − 3 r r dr dθ
2
2π
0
− y 2 − 3x 2 + 3y 2 dA
16 − r 2 (−2r ) − 3 r 2 dr dθ
1
2
− 16 − r
3
(
)
3/ 2
3
64
dθ
2− 3 π
=
3
3
64
Por lo tanto, el volumen del sólido es
2 − 3 π u3 .
3
=
∫
2 π 64 − 32
2
3 3
−
r dθ
3 0
0
(
)
(
8.
)
Sea D la región del plano limitada por la gráfica de x 2 + y 2 =
2x.
Calcule la siguiente integral doble usando coordenadas polares
∫∫
x 2 + y 2 dA
D
Solución
La figura 7.2.29 muestra la región D de integración.
Y
x2 + y 2 =
2x
=
r 2cos θ
D
0
1
2
X
Al reemplazar
=
x rcos θ
en la ecuación de
=
y rsen θ
la circunferencia x 2 + y 2 =
2x,
se obtiene
=
r 2 cos θ
Fig. 7.2.29
Una descripción analítica de la región D en coordenadas
polares es
π
π
=
D (r ; θ) ∈ 2 / − ≤ θ ≤ ; 0 ≤ r ≤ 2cos θ
2
2
Luego, al reemplazar x = r cos θ, y = r sen θ, y =
dA r dr dθ en
la integral doble, resulta
Capítulo 7. Integral doble
509
I=
∫∫
2
2
x + y dA =
D
=
π
2
8
=
3
π
2
−
π
2
∫
−
16
=
3
2
0
π
2
16
=
θ dθ
cos
3
π
2
π
2
−
3
π
2
2 cos θ
∫ ∫
∫=
∫ r drdθ ∫
−
f (θ=
) cos3θ es una función par.
2 cos θ
π
2
∫
0
r . r dr dθ
2 cos θ
r3
3 0
π
2
π
2
0
dθ
cos3θ dθ
∫ (1 − sen θ) cos θ dθ
2
0
π
16
sen3θ 2 32
=
sen
θ
−
=
3
3 0 9
9.
Calcule el volumen del sólido limitado por las gráficas de las
ecuaciones
z=
1
2
x 2 + y 2 − 1 , x 2 + y 2 = 1, z = 2
Solución
Las gráficas de las ecuaciones corresponden respectivamente a un hiperboloide de una hoja, a un cilindro circular
y a un plano.
S1=
:z
1
2
x2 + y 2 − 1,
S2 : x 2 +=
y 2 1,
S3=
:z 2
La intersección de S1 con S3 y de S2 con S3 son las circunferencias C1 y C2 respectivamente, esto es
C1 : x 2 + y 2 = 9, z= 2
C2 : x 2 + y 2 = 1, z = 2
El sólido E está limitado superiormente por S3 , inferiormente por S1 y lateralmente por S2 (figura 7.2.30) y su proyección ortogonal sobre el plano XY es el anillo circular que se
muestra en la figura 7.2.31, que corresponde a la región D de
integración.
510
Cálculo II
Z
Y
r=3
D
r=1
1
0
X
0
Y
1
3
X
Fig. 7.2.30
Fig. 7.2.31
Por la naturaleza de la región de integración se hace el cambio de variables a coordenadas polares para facilitar el cálculo
del volumen del sólido.
Así, una descripción analítica de la región D en coordenadas polares es
=
D
{ (r; θ) ∈ 2 /
0 ≤ θ ≤ 2π , 1 ≤ r ≤ 3
}
Luego, el volumen del sólido E está dado por
V ( E=
)
∫∫ 2 −
D
=
=
=
2π
3
0
1
∫ ∫
∫
∫
2π
0
x 2 + y 2 − 1 dA
2
1
r 2 − 1 r dr dθ
2 −
2
3
2
3
r − 1 dθ
r −
3 2
1
2π 8
0
1
3
2
dθ=
1
(
2
)
16
π
3
Por lo tanto, el volumen del sólido es
16 3
πu .
3
Capítulo 7. Integral doble
511
Ejercicios y problemas propuestos 7.2
1.
2.
3.
Calcule el volumen del sólido E que está
1,
limitado por las superficies S1 : y + z =
S2 : y = x 2 y el plano XY .
Use una integral doble para calcular el área
de la región limitada por las gráficas de
y = lnx, y = 2lnx y la recta x = e.
x 2 + y 2 dA
D
donde D es la región del plano dada por
=
D
{ ( x; y ) ∈ 2 / 1 ≤ x 2 + y 2 ≤ 4 }
7.
Calcule el volumen del sólido E limi
tado por las superficies S1 : z = 1 + x2 + y2,
S2 : x2 + y2 = 2y y S3 : z = 0.
8.
Calcule el volumen del sólido limitado por
las gráficas de las ecuaciones
z2 = x2 + y 2 + 4 y x2 + y 2 =
4
9.
Calcule el volumen del sólido limitado por
las gráficas de las ecuaciones
7 x2 + 7 y 2 + 9z 2 =
63 y x 2 + y 2 =
3y
10. Calcule el volumen del sólido limitado por
las superficies
Sean
• E el sólido limitado por
S1 : y = x , S2 : y + z =
4,
=
S3 : x 0=
y S4 : z 0.
• E1 es la parte de E que se encuentra encima del plano z = 1.
• E2 es la parte de E que se encuentra debajo del plano z = 1.
Calcule el volumen de las regiones E1 ,
E2 y E.
5.
Calcule el volumen del sólido E limitado por
las superficies
S1 : z =6 − 3x − 2 y , S2 : x 2 + y 2 =y y S3 : z = 0.
Calcule la integral doble
∫∫
4.
6.
Utilice coordenadas polares para calcular la
integral doble
∫∫
x 2 + y 2 dA
D
donde D es la región del plano limitada por
y x=
, y 0
las gráficas de las ecuaciones=
y x = 1.
S1 : z =4 + 15 − x 2 − y 2
S2 : z =6 − 15 − x 2 − y 2
11. Calcule el volumen del sólido limitado por
las gráficas de las ecuaciones
z =−2 −
x2 + y 2
z =− 6 +
x2 + y 2
12. Calcule el volumen del sólido limitado por
las superficies
S1 : z =4 − x 2 − y 2 y S2 : z= 4 − 2 y
13. Calcule el volumen del sólido limitado por
las gráficas de las ecuaciones
z = 16 − x 2 − y 2 y =
z 16 − 4x
14. Calcule el volumen del sólido limitado por
las gráficas de las ecuaciones
z2 =
x2 + y 2 − 4, z =
−4 y z = 4
512
Cálculo II
15. Calcule el volumen del sólido limitado superiormente por el paraboloide x2 + y2 = 8z,
inferiormente por el plano z = 0 y lateralmente por el cilindro circular x2 + y2 = 2x.
16. Calcule las siguientes integrales
a)
∫∫
e
− 4( x 2 + y 2 )
dA , donde
D
=
D
{ (x; y) ∈ 2 / y ≥ 0,1 ≤ x2 + y2 ≤ 9 }
b)
∫∫ cos (3π (x
D
D
=
c)
∫∫
D
2
))
+ y 2 dA, donde
{ ( x; y ) ∈ 2 / x ≤ 0 ,
4 ≤ x 2 + y 2 ≤ 25
}
x2 y 2
ln + dA, donde
4
9
x2 y 2
=
+
≤ 16
D ( x; y ) ∈ 2 / x ≤ 0 , y ≤ 0 , 4 ≤
4
9
Capítulo 7. Integral doble
513
7.3Revisión del capítulo
El siguiente esquema resume el contenido del capítulo.
Integral doble
Integrales dobles sobre
regiones no rectangulares
Integrales dobles sobre
regiones rectangulares
Cambio de
orden de integración
Integrales dobles en
coordenadas polares
Volumen
de un sólido
Ejercicios y problemas resueltos 7.3
1.
Sea D la región del plano limitada por las gráficas de las
2
=
y x=
, y 2x
ecuaciones
a) Grafique la región D en el plano XY .
b) Calcule
Y
dA
D
Solución
3
a) La gráfica de la región D se muestra en la figura 7.3.1
2
b) La descripción analítica de la región de integración D está
dada por
0
D
=
D
1
Fig 7.3.1
Cálculo II
−y
4
1
514
∫∫ xe
2
X
{ ( x; y ) ∈ 2 / x 2 ≤ y ≤ 2 x; 0 ≤ x ≤ 2 }
Luego, al calcular la integral doble mediante integrales
iteradas, se tiene
∫∫
I
=
xe − y dA
=
D
=
∫(
2
0
= −
2.
2
2x
0
2
∫∫
x
xe − y dydx
=
∫
2
2x
− xe − y 2 dx
x
0
)
2
2
1 2
− xe − 2 x + xe − x dy = xe − 2 x + e − x − e − x
2
0
3e − 4 + 1
4
Calcule las siguiente integral doble
4− x2
2
∫ ∫
−2
− 4− x
4 − y 2 dydx
2
Solución
De acuerdo con los límites de las integrales iteradas, la descripción analítica de la región de integración D está dada por
=
D
{(x; y) ∈
2
}
/ − 4 − x 2 ≤ y ≤ 4 − x 2 ; −2 ≤ x ≤ 2
La región D se muestra en la figura 7.3.2
Y
2
D
0
0
–2
X
2
Fig. 7.3.2
Como resulta más fácil integrar con respecto a la variable x
es conveniente cambiar el orden de integración. Así, la descripción analítica de la región D es
=
D
{ ( x; y ) ∈
2
/ −2 ≤ y ≤ 2; − 4 − y 2 ≤ x ≤ 4 − y 2
}
Luego, al calcular la integral doble con los nuevos límites de
integración se tiene
=
I
2
4− x2
−2
− 4 − x2
∫ ∫
∫
2
4 − y 2=
dydx
4 − y 2 x
=
−
−2
=4
2
∫(
0
4− y2
4− y2
2
4− y2
−2
− 4− y2
∫ ∫
2
∫ (
4 − y 2 dxdy
)
dx =
2 4 − y 2 dy
−2
2
y3
64
4 − y dy = 4 4 y − =
3 0 3
2
)
Capítulo 7. Integral doble
515
3.
Calcule
2
2
0
y
∫∫
(
)
y sen x3 + 1 dx dy
Solución
Dado que no es posible determinar la integral
∫
2
y
(
)
ysen x3 + 1 dx
con los métodos de integración estudiados, se ensaya un
cambio en el orden de integración para facilitar el cálculo de la
integral doble.
Así, de acuerdo con los límites de las integrales iteradas dadas, la descripción analítica de la región de integración D está
dada por
=
D
{ (x; y) ∈ 2 / 0 ≤ y ≤ 2; y ≤ x ≤ 2 }
La región D se muestra en la figura 7.3.3.
Y
y=x
D
2
0
X
Fig 7.3.3
Para cambiar el orden de integración se considera la siguiente descripción analítica de la región D
=
D
{ ( x ; y ) ∈ 2 / 0 ≤ x ≤ 2; 0 ≤ y ≤ x }
Luego, al calcular las integrales iteradas con los nuevos límites de integración, se tiene
=
I
2
2
0
y
∫∫
(
)
ysen x3 + 1 =
dx dy
∫
(
3
x
)
x
0
0
∫∫
y2
1
= sen x + 1 dx =
0
6
2 0
2
2
∫
2
0
516
Cálculo II
)
)
(
)( )
sen x3 + 1 3x 2 dx
2 cos (1) − cos (9)
1
= −cos x3 + 1 =
0
6
6
(
(
ysen x3 + 1 dydx
4.
Calcule
1
∫∫
0
π
2
arcsenx
xcosy
3
8 (seny) + 1
dy dx
Solución
Dado que no es posible determinar la integral
∫
π
2
arcsenx
xcosy
3
8 (seny) + 1
dy
con los métodos de integración estudiados, se ensaya un cambio en el orden de integración para facilitar el cálculo de la integral doble.
Así, de acuerdo con los límites de las integrales iteradas dadas, la descripción analítica de la región de integración D está
dada por
=
D ( x; y) ∈ 2 / 0 ≤ x ≤ 1; arcsenx ≤ y ≤
π
2
Y
y = arcsenx
π
2
D
La región D se muestra en la figura 7.3.4.
Para cambiar el orden de integración se considera la siguiente descripción analítica de la región D
0
1
X
Fig. 7.3.4
π
=
D ( x; y) ∈ 2 / 0 ≤ y ≤ ; 0 ≤ x ≤ sen y
2
Luego, al calcular las integrales iteradas con los nuevos límites de integración, se tiene
I=
=
I=
1
∫∫
0
π
2
0
∫∫
∫
π
2
0
π
2
arcsenx
3
8 (seny) + 1
xcosy
seny
0
xcosy
3
8 (seny) + 1
cosy
3
8 (seny) + 1
π
2
∫
dy dx
=
3
=
z 8 (seny) + 1
se obtiene
dxdy
dz
y=
sen y
0
24sen ycosy dy
y = 0 ⇒ z =1
x dx dy
1 2 sen y cos y
1
= =
dy
3
2 0 8 (sen y) + 1
48
∫
Al hacer el cambio de variable
∫
π
2
0
24sen2 y cos y
3
8 (sen y) + 1
π
⇒ z=9
2
dy
9
1 9 1
1
1
2 z
=
dz =
1
48 1 z
48
12
∫
Capítulo 7. Integral doble
517
5.
Calcule
e
2 lnx
1
lnx
∫∫
=
I
y
x e + 1 dy dx +
e2
2
e
lnx
∫ ∫
x e y + 1 dy dx
Solución
Sean
e
2 lnx
1
lnx
∫∫
I1 =
x e y + 1 dy dx ,
I2 =
e2
2
e
lnx
∫ ∫
x e y + 1 dy dx
Si D1 y D2 representan las regiones de I1 y I2 respectivamente, de acuerdo con los límites de las integrales iteradas, la
descripción analítica de cada región está dada por
{ (x; y) ∈ 2 / 1 ≤ x ≤ e; lnx ≤ y ≤ 2lnx }
{ (x; y) ∈ 2 / e ≤ x ≤ e 2 ; lnx ≤ y ≤ 2 }
=
D1
=
D2
Las regiones D1 y D2 se muestran en la figura 7.3.5
Y
2
D2
y = 2 ln x
y = ln x
D1
1
0
e2
e
X
Fig 7.3.5
Si D = D1 D2 , una descripción analítica de D está dada por
=
D
{ ( x; y ) ∈
2
/ 0 ≤ y ≤ 2; e y/ 2 ≤ x ≤ e y
}
Luego, al calcular la integral doble mediante integrales iteradas, se tiene
=
I
=
e
2 lnx
1
lnx
∫∫
∫∫
x e y + 1dy dx +
x e y + 1 dA
=
D
=
e + 1
0
∫
518
Cálculo II
2
y
∫
ey
e2
2
e
lnx
∫ ∫
2
ey
0
ey/2
∫∫
x e y + 1 dydx
x e y + 1 dx dy
ey
2
x2
y
=
+
1
x
dx
dy
e
dy
0
ey/2
2 ey/2
∫
1
=
2
=
1
2
=
6.
∫
2
0
1
e + 1 e − 1 e dy
=
2
(
y
e 2 +1
∫ (z
3/ 2
2
)
y
y
)
− 2z1/ 2 dz =
∫
e 2 +1
2
z ( z − 2) dz
e 2 +1
Al hacer el cambio de variable
=
z ey + 1
se obtiene
1 2 5 / 2 4 3/ 2
z − z
2 5
3
2
dz = e y dy
y=0 ⇒ z=2
y = 2 ⇒ z = e2 + 1
5/ 2
3/ 2 8 2
1 2
2
− e2 + 1
+
e +1
5
3
15
(
)
(
)
Calcule en cada caso el volumen del sólido limitado por las
gráficas de las ecuaciones dadas.
a) z=
100 − x 2 − y 2 , x 2 + y 2= 36, x 2 + y 2= 64, z= 3
3, z =
−3, x 2 + y 2 − z 2 =
16
b) z =
Solución
Z
a) Las gráficas de las ecuaciones dadas corresponden a una
semiesfera de radio 10, dos cilindros circulares de radios 6
y 8 respectivamente y un plano horizontal ( z = 3) . La figura
7.3.6 muestra un esbozo del sólido limitado por dichas superficies.
El volumen V del sólido está dado por
=
V
∫∫ ( 100 − x
2
0
–8
8
Y
X
)
2
3
Fig. 7.3.6
− y − 3 dA
D
donde D es el anillo circular que se obtiene al proyectar el
sólido sobre el plano XY como se muestra en la figura 7.3.7
Por la forma de la región D se hace un cambio de variables a coordenadas polares para facilitar el cálculo de la
integral doble.
Y
r=8
Así, una expresión analítica de la región D en coordenadas polares es
=
D
{ (r; θ) ∈ 2
/ 0 ≤ θ ≤ 2π , 6 ≤ r ≤ 8
}
dA rdr dθ,
Luego, al reemplazar x = r cos θ, y = r sen θ y =
se tiene
=
V
∫∫ ( 100 − x
2
)
− y 2 − 3 dA
r=6
0
6
8
X
Fig. 7.3.7
D
=
=
∫ ∫ ( 100 − r
2π
8
0
6
2π
8 −1
∫ ∫
0
(
2
)
− 3 r dr dθ
100 − r 2
6
2
)
1/ 2
(−2r ) − 3r dr dθ
Capítulo 7. Integral doble
519
2π
1
100 − r 2
=
=−
0 3
∫
=
(
)
3
2
8
3r 2
−
dθ
2
6
170 2 π
340 π
170
dθ =
=
(2π)
3 0
3
3
∫
Por lo tanto, el volumen del sólido es
340 π 3
u .
3
b) En este caso el sólido está limitado superior e inferiormente por los planos P1 : z = 3 y P2 : z = −3 y lateralmente por el
hiperboloide de una hoja S : x 2 + y 2 − z 2 =
16 (figura 7.3.8).
El volumen del sólido es igual al volumen del cilindro de
radio 5 y altura 6 que contiene al sólido menos el volumen de
la parte exterior al sólido pero interior al cilindro, es decir
2
V=
π (5) (6) −
∫∫
D
(
)
x 2 + y 2 − 16 − − x 2 + y 2 − 16 dA
donde D es el anillo circular que se muestra en la figura 7.3.9
Y
Z
r=5
3
r=4
–4
5
4 5
X
0
Y
–3
X
Fig. 7.3.8
Fig 7.3.9
Así, una descripción analítica de la región D en coordenadas polares es
=
D
{ (r; θ) ∈ 2 /
0 ≤ θ ≤ 2π , 4 ≤ r ≤ 5
}
dA rdr dθ, el
Luego, al reemplazar x = r cos θ, y = r sen θ y =
volumen del sólido es
∫∫ 2
x 2 + y 2 − 16 dA
∫ ∫(
r 2 − 16 2rdr dθ
V
= 150π −
D
= 150π −
= 150π −
∫
2π
5
0
4
2π 2
0
(
)
2
)
3 5
2 =
r − 16
3
4
150π − 18
∫
2π
0
d=
θ 114 π
Por consiguiente, el volumen del sólido es 114 π u3 .
520
Cálculo II
7.
Se desea construir una piscina cuyo borde tenga una forma
elíptica donde los diámetros mayor y menor midan 20 m y 10
m, respectivamente. El fondo de la piscina debe ser un plano
inclinado donde las profundidades menor y mayor son de 1 y
2 metros y se ubican debajo de los vértices de la elipse (figura
7.3.10). ¿Qué capacidad tiene la piscina?
1m
2m
Fig. 7.3.10
Solución
Al insertar un sistema de coordenadas tridimensional en relación con la piscina como se muestra en la figura 7.3.11 se tiene
Z
1
–10
X
10 Y
0
–1
Fig. 7.3.11
Las ecuaciones de la superficie y el fondo de la piscina corresponden a los planos
P1 : z = 1 y P2 : 20z + y + 10 = 0 ⇔ z =
− y − 10
20
mientras que la superficie lateral de la piscina corresponde al
cilindro
S:
x2 y 2
1
+
=
25 100
La capacidad de la piscina está dada por
− y − 10
y + 30
V=
1 − 20 dA =
20 dA
∫∫
D
∫∫
D
donde D es la región del plano XY limitada por la elipse de
ecuación
x2 y 2
1
+
=
25 100
Capítulo 7. Integral doble
521
En la figura 7.3.12 se muestra la región de integración D.
2
2
2
2
y
x
x y
1⇔ + =
1
+
=
25 100
5 10
10
Y
Al hacer el cambio de variable
D
y
x
=r cos θ,
= r sen θ
5
10
0
5 X
se tiene
x= 5r cos θ, y= 10r sen θ
Fig. 7.3.12
Al sustituir x= 5 rcos θ, y= 10 rsen θ, el jacobiano de la transformación T en cualquier punto (r; θ) ∈ 2 es
∂x ∂x
∂r =
∂θ
∂y ∂y
∂r ∂θ
∂ ( x; y)
JT =
(r ; θ) =
∂ (r ; θ)
5cos θ −5r sen θ
10sen θ 10rcosθ
= 50r cos2 θ + 50r=
sen2 θ 50r
Una descripción analítica en coordenadas polares de la
región D es
=
D
{ (r; θ) ∈ 2 /
}
0 ≤ θ ≤ 2π , 0 ≤ r ≤ 1
Luego, al reemplazar x= 5r cos θ, y= 10r sen θ,=
y dA 50rdrdθ,
se tiene
V
=
y + 30
=
20 dA
∫∫
D
= 25
= 25
2π 1
2 π 1 10r sen θ + 30
∫ ∫
0
0
θ + 3r ) dr dθ 25
∫ ∫ (r sen=
∫
0
∫
50r dr dθ
20
2
0
1
2π r 3
0
3r 2
θ
+
sen
dθ
2 0
3
3
3
1
1
sen θ + dθ = −25 cos θ − θ
2
2
3
3
= 75π
Por lo tanto, la capacidad de la piscina es 75 π m3.
8.
Calcule el volumen del sólido E en el primer octante acotado
2
por los planos Y Z, XY , el cilindro S : x 2 + ( y − 2) =
4 , y el
5.
plano P : y + z =
Solución
En la figura 7.3.13 se muestra el sólido E.
522
Cálculo II
Z
5
z= 5 − y
4
0
Y
X
Fig 7.3.13
El volumen del sólido E está dado por la integral doble
=
V
∫∫ (5 − y) dA
La ecuación de la circunferencia
que limita la región D en coordenadas cartesianas es
D
donde, D es la región del plano que se muestra en la figura
7.3.14.
Y
C :x 2 + ( y − 2)2 =
4
Al transformar esta ecuación a
coordenadas polares se tiene
(rcos θ)2 + (r sen θ − 2)2 = 4
⇔ r (r − 4sen θ) =0
D
0
Luego, la ecuación de la circunferencia de centro en el punto
C(0; 2) y radio de longitud 2 en
coordenadas polares es
X
C=
:r 4 sen θ
Fig. 7.3.14
Una descripción analítica de la región D en coordenadas
polares es
π
=
D (r ; θ) ∈ 2 / 0 ≤ θ ≤ , 0 ≤ r ≤ 4 sen θ
2
dA r drdθ,
Luego, al reemplazar x = r cos θ, y = r sen θ y =
se tiene
π
V=
4 sen θ
∫∫ (5 − y) dA = ∫ 02 ∫ 0
(5 − r sen θ) r dr d θ
.
D
=
∫
π
2
2 5r
0
2
−
3
4 sen θ
r
sen θ=
3
0
∫
π
2 40sen2 θ −
0
64sen4 θ
dθ
3
π
14
2
2
= 12θ − sen (2θ) − sen (4θ) = 6π
3
3
0
Por lo tanto, el volumen del sólido E es 6π u3 .
Capítulo 7. Integral doble
523
9.
2m
k
3m
Fig. 7.3.15
En una estación de venta de combustible la gasolina de 95 octanos se almacena en un tanque de forma cilíndrica circular de
1 metro de radio y 3 metros de largo. Este tanque se encuentra
debajo de la superficie con la generatriz paralela al piso de la
estación. Se desea determinar la cantidad de gasolina que tiene el tanque introduciendo en él una varilla perpendicular a la
superficie y midiendo la porción de varilla que queda húmeda por el contacto con el combustible (figura 7.3.15). Presente
una función que exprese el volumen de gasolina que queda en
el tanque en función de la longitud k (en m) de la porción de
varilla húmeda.
Solución
Una alternativa para calcular el volumen del combustible
es utilizar integrales dobles. Para ello se hace coincidir un
sistema de coordenadas tridimensional como se muestra en la
figura 7.3.16.
Z
2m
k
X
0
Y
3m
Fig. 7.3.16
Las ecuaciones de la superficie cilíndrica circular y del plano que contiene a la superficie del combustible son
2
S : x 2 + ( z − 1) =1
⇔ S : z =1 ± 1 − x 2
P: z=k
Luego, se tienen dos casos:
a) Si 0 ≤ k ≤ 1, el sólido limita superiormente con el plano P e
inferiormente con el cilindro S1 : z =−
1 1 − x 2 , y D es la
proyección de la superficie rectangular de la gasolina sobre
el plano XY . Luego,
Para 0 ≤ k ≤ 1
1− k
1
V
=
k
Cálculo II
))
1 − x 2 dA
D
2k − k
524
∫∫ (k − (1 −
2
=
∫
2k −k2
− 2k−k
∫ (k − 1 +
3
2
0
)
1 − x 2 dy dx
=
∫
− 2k−k
∫
= 3
= 6
(
2k −k2
∫
2k −k2
− 2k −k2
2k −k2
0
)
3
k − 1 + 1 − x 2 y dx
0
2
(k − 1 +
(k − 1 +
)
1 − x 2 dx
)
1 − x 2 dx
(
)
1
= 6 ( k − 1) x + x 1 − x 2 + arc sen ( x)
2
0
1
= 6 ( k − 1) 2k − k 2 +
2
= 3 arc sen
(
(
2k −k2
2k − k 2 (1 − k ) + arc sen
(
))
2k − k 2
)
2 k − k 2 − 2 k − k 2 (1 − k )
b) Si 1 ≤ k ≤ 2, el volumen se obtiene como la diferencia del volumen de todo el cilindro menos el volumen de la parte del
tanque que está vacía y D es la proyección del rectángulo
superficie de la gasolina sobre el plano XY , es decir
V = 3π −
∫∫ ((1 +
) )
1 − x 2 − k dA
D
= 3π −
= 3π −
∫
∫
2k −k2
− 2k −k2
(
∫
2k −k2
− 2k −k2
2k −k2
0
)
Para 1 ≤ k ≤ 2
3
1 − k + 1 − x 2 y dx
0
− 2k −k2
∫
)
1 − x 2 dy dx
0
2k −k2
= 3π − 3
= 3π − 6
∫ (1 − k +
3
(1 − k +
(1 − k +
k −1
)
2
Y
)
1 − x dx
(
3
)
1
= 3π − 6 (1 − k ) 2 k − k 2 +
2
(
k
1 − x 2 dx
1
= 3π − 6 (1 − k ) x + x 1 − x 2 + arc sen ( x)
2
0
= 3π − 3 arc sen
1
)
(
2k−k
2
2 k − k 2 ( k − 1) + arc sen
2 k − k 2 − 2 k − k 2 (1 − k )
D
(
))
2k − k 2
0
− 2k − k 2
2k − k 2
X
Fig. 7.3.17
Capítulo 7. Integral doble
525
Por consiguiente, el volumen de combustible V en función
de la longitud k (en m) de la porción de varilla húmeda es
(
)
3 arc sen 2 k − k 2 − 2 k − k 2 (1 − k ) ,
V =
2
2
3π − 3 arc sen 2 k − k − 2 k − k (1 − k ) ,
(
Ejercicios y problemas propuestos 7.3
1.
∫∫
D
x2
dA ,
x2 + y 2 + 4
{ ( x; y ) ∈
=
D
b)
∫∫ (e
4− x2 − y 2
D
2
2.
/ −2 ≤ y ≤ 0; − y ≤ x ≤ 8 − y 2
∫∫
D
d)
∫∫ (
{ ( x; y ) ∈
2
2
} (z − 4)
2
/ −2 ≤ y ≤ 0; − 4 − y 2 ≤ x ≤ 4 − yc)
}
+ x 2 + y 2 = 16 , 4 z = x 2 + y 2
d) z =2 + x 2 + y 2 ,
3.
/ −1 ≤ x ≤ 0; 0 ≤ y ≤ 1 − x 2
))
(
2
x 2 + y 2 =9 ,
z =0.
z 3, =
z 1.
e) x 2 + y 2 =
4, , y + =
x 2 cos x 2 + y 2 dA ,
D
{ ( x; y ) ∈
)
b) z =
4 − x 2 + y 2 , z =x 2 + y 2
x2
x2 + y 2
xy dA ,
e
=
D
.
Calcule en cada caso el volumen del
sólido limitado por las gráficas de las
ecuaciones dadas
1
a) z = 0, z = x 2 + y 2 , x 2 + y 2 = 64.
8
(
)
/ −2 ≤ y ≤ 0; − 4 − y 2 ≤ x ≤ 4 − y 2
c)
}
y dA ,
{ ( x; y ) ∈
=
D
2
2
si 1 ≤ k ≤ 2
π
π
=
D ( x; y) ∈ 2 / −
≤ x ≤ 0; 0 ≤ y ≤
− x2
4
4
π
π
Calcule en cada caso la integral
=
D doble
) ∈ 2 / − ≤ x ≤ 0; 0 ≤ y ≤ − x2
( x; yme4
4
diante coordenadas polares.
a)
{ ( x; y ) ∈
)
si 0 ≤ k ≤ 1
1
S :z =
8 − x 2 + y 2 e inferiormente por
8
el plano P : z= 8 − x.
(
)
}
/ − 5π ≤ x ≤ 5π ; 0 ≤ y ≤ 5π4.
− x 2 Calcule el volumen del sólido limitado inferiormente por la superficie
x ; y ) ∈ 2 / − 5π ≤ x ≤ 5 π ; 0 ≤ y ≤ 5 π − x 2
1
S :=
z x 2 + y 2 − 4 y superiormente por
4
sec 2 x 2 + y 2 dA ,
e)
el plano P : z= y − 4.
=
D
∫∫ (
D
526
Cálculo II
(
2
}
Halle
el
volumen
del
sólido
S
limitado superiormente por la superficie
}
))
(
)
5.
Calcule el volumen del sólido limitado superiormente por la superficie
S : z =+ x 2 + y 2 ,
inferiormente por el
plano P : z = 0. y lateralmente por el cilindro
2
C : ( x − 3) + y 2 =
9.
6.
Calcule la capacidad de una piscina de
forma circular con radio de 6 metros si
se sabe que el fondo de la piscina es un
plano inclinado, de tal manera que la mínima y máxima profundidades son 1 y 2 metros respectivamente.
7.
Se requiere construir una pieza sólida de
bronce con la forma de un cono elíptico
recto, donde la base es una elipse de diámetros mayor y menor de longitudes 8 y 6
centímetros respectivamente y la altura del
sólido es de 10 centímetros (figura 7.3.18).
Calcule la cantidad de bronce necesaria para
consstruir dicha pieza.
Fig. 7.3.18
Capítulo 7. Integral doble
527
Respuestas a los ejercicios
y problemas propuestos
Capítulo 1
Ejercicios y problemas propuestos 1.1
21
1.1.
2
2.1.
2.
21
2
21
2
21
2.
2
3. a ) 5
b) 2 p − 5
21
2
3. a ) 5
b) 2 p − 5
2.
3. a)3.5 a) 5 b) 2b)p 2p
− 5– 5
4. a) –1 b) −
5.
c=2
6.=
c
c)
c ) 22p
p
d)d) 2p +
34
3
8.8.
8. a) 14
d) Impropia e) Impropia
1
1
, convergente b) −
, convergente
3
160
c) 1, convergente d) +∞ , divergente
p
e) divergente
f) − , convergente
2
4e − 1
c) −
2
2p
3
p
d) ln + 1
6
6
1
− arcsen
e) 18 arcsen
3
4
p2 ln2
−
64
4
k)
g)
(
4p
m)
−2 3
3
p)
2.
)
p 2 ln 2 + 1 p
+
−
8
2
4
7 5 −8 2
3
q)
11 − 9 3
3888
6
j) 3e + e
l)
1
2
80 3
o)
27
r)
p
3
+
6 2
1
, convergente
2
1
3
− ln 2 − 3 −
, convergente
2
3 3
(
)
p5
, convergente
80
m) +∞ , diveregente
2
h)
l)
ln2
, convergente
9
3
, convergente b) −∞ , divergente
2
1
c) +∞ , divergente d) 3 1 − , convergente
e
e) −1, convergente f) p + 2, convergente
3. a)
g) +∞ , divergente
h) +∞ , divergente
i) −∞ , divergente
j) divergente
k) −∞ , divergente
l) +∞ , divergente
5. a) Sí
b) Sí
c) Sí
d) Sí
6. 12
−7
3. a) V
ln3
n)
4
j)
k)
p 3 p ln2 7p2
− −
−
3
4
2 288
5 p
i) 2ln2 + −
6 2
ln2
, convergente
3
i) 0, convergente
g) −
Ejercicios y problemas propuestos 1.2
2e
f) Impropia
2. a)
9. 3
1
h)
3
13ln3 − 2
3ln3
1. a) Impropia b) No es impropia c) Impropia
29
b)
2
f)
0
Ejercicios y problemas propuestos 1.3
b) [ 3; 6 ]
b)
5.
24
34
c ) 2p
d)72p +
3 −1152 x − 2
(
)
LT : y =
34
1
c ) 2p 7. d) 2L
p +: y
(x − 2)
=
N 3
1152
3
16 − p2
4
32
3
48
6.
43
2
7. a) [ 3; 15 ]
1. a)
4.
b) V c) V
7. 4
Respuestas a los ejercicios y problemas propuestos
531
Capítulo 2
Ejercicios y problemas propuestos 1.4
1. a) 2p − 10
b)
∫
13p
−4
2
c) 20 +
5p
2
8
=
2. A ( D2 ) 7=
u2 ;
f ( x) dx 1
3. –3
−5
Ejercicios y problemas propuestos 2.1
1. a)
8
c) ln
3
35
1
e) − + 2arctan
48
2
6. a) 2ln (3ln3 + 3) b)
h)
(ln2)2
4
160 ln 2 35
−
3
4
p
96
i)
p
3
g) 1 − ln4 +
j)
(
8. LN : x = 0.
c) Diverge
d) Converge a
e) Diverge
f) Converge a
g) Diverge
10. =
a) F (s)
12. 1
Cálculo II
k) 18u2
n) ln (4096) u2 ≈ 8, 318 u2
p
− arcsen e −2
2
p 3
ln5
− arctan (2) −
4 2
4
p
16
h) Converge a p
15
4
1
, s > ln2
s − ln2
b) Sí c) Sí
j) 2 (p − 1) u2 ≈ 4, 283 u2
16 2
2
m) 16 −
u ≈ 6 , 296 u
e
e−s
1 4
F (s)
, s>0
b) F (s) =2 + , s > 0 c) =
s
s
s
1
d) F (s)
=
, s > ln3
(s − ln3)2
11. a) Sí
i ) 8u2
l) 4 (3 − arctan 3) u2 ≈ 7 , 004 u2
p
e2
i) Converge a 16 ln 2 −
44 2
u ≈ 2, 933 u2
15
h)
17 5
ln
8 3
( )
b) Converge a 2 ln (1 + e −1 )
9. a) Converge a
)
g) 6 − 24e −3 u2 ≈ 4, 805 u2
3− 2
7. LT : 10x – y – 7 = 0
532
c) 16u2
16 2 2
u ≈ 7 , 203 u2
p
f)
5. a) Impar b) 0
f)
b) 9u2
d) 2 (e − 2) u2 ≈ 1, 437 u2 e) 2p u2 ≈ 6, 283 u2
4. 18
d)
686 2
u ≈ 8, 469 u2
81
2. a) 2u2
d)
2
b) 0, 5u
2
2
c) 4p u ≈ 12, 566 u
4 2
u ≈ 1, 333 u2
3
f) 1u2
(
e)
64 2
u ≈ 21, 333 u2
3
)
g) 2 − 2 u2 ≈ 0, 586 u2
3.
a = −5
4.
35 2
u ≈ 5, 833 u2
6
5.
4, 5u2
6.
2 e 2 + e −2 − 2 u2 ≈ 11, 049 u2
7.
8p u2 ≈ 25,133 u2
8.
6 ln2 u2 ≈ 14,159 u2
9.
36
4
2
2
+ 9 arcsen + 9p u ≈ 43, 820 u
5
5
(
)
p 2
2
10. ln 27 −
u ≈ 1, 482 u
3
11.
2 2
u ≈ 0, 667 u2
3
Ejercicios y problemas propuestos 2.2
1.
21p 3
u ≈ 32, 987u3
2
2.
(1 − ln2) p u
3.
(3 arctan 3 − ln
4.
1296p 3
u ≈ 814, 301u3
5
5.
(e − 2) p u
6.
6p u3 ≈ 18, 850 u3
7.
((ln2)
8.
40p 3
u ≈ 114, 384 u3
ln3
9.
3p 3
u ≈ 2, 356 u3
4
3
3
2
p
21. ln2 + − 2 p u3 ≈ 0 , 829 u3
2
(
)
22. 4e − e 2 − 1 p u3 ≈ 7 , 804 u3
3
≈ 0, 964 u
)
3
3
10 p u ≈ 8,155 u
3
≈ 2, 257 u
)
− 6ln2 + 4 p u3 ≈ 1, 010 u3
p
3 1 3
10. +
− p u ≈ 0, 306 u3
24
8
4
p
2 3
3
11. + 2ln 1 +
p u ≈ 5, 828 u
2
4
p
23. ln2 + p u3 ≈ 3, 823 u3
6
24. (2ln2 − 1) 4p u3 ≈ 4, 854 u3
25.
(
)
2 − 1 8p u3 ≈ 10, 410 u3
79
26. − e 2p u3 ≈ 24 , 285 u3
12
p2 1
27. + p u3 ≈ 5, 447 u3
8 2
22
28. p + 4p u3 ≈ 57 , 909 u3
15
Ejercicios y problemas propuestos 2.3
15
1. a) 2e 4 − u ≈ 107 , 321u
8
b) 6, 7u
500p 3
u ≈ 523, 599 u3
12.
3
c)
3
1
e + ln
u ≈ 0 , 559 u
2
4 (1 + e)
13. 40 5p u3 ≈ 280 , 993 u3
d)
7sen 4 548 3
3
+
14. cos 4 +
p u ≈ 108, 559 u
4
15
1
27
46 + ln u ≈ 11, 588 u
4
19
e)
771
u ≈ 8, 690 u
64ln4
2p
3 3
3
15. +
p u ≈ 7 ,124 u
3
10
f)
779
u ≈ 3, 246 u
240
1 p
g) + u ≈ 1,119 u
3 4
3
3
16. 4p u ≈ 12, 566 u
e 3 e 2 11
17. − − p u3 ≈ 1,167 u3
3 2 6
18.
2p 3
u ≈ 2, 094 u3
3
p
19. 1 − 2p u3 ≈ 0, 953 u3
4
p
20. e − 3 u3 ≈ 6, 894 u3
2
(
2
)
h) 1, 080u
2.
221
+ 13 u ≈ 25, 706 u
10
3. 12u
4.
30
u ≈ 10, 820 u
ln16
Respuestas a los ejercicios y problemas propuestos
533
Ejercicios y problemas propuestos 2.4
1.
8,1u2
2.
p u2
4
1
20. arcsen − arcsen − u ≈ 1, 451u
5
2
3. – 4
21. a)
4. b = 3
5. a) F, b) V, c) F, d) V
6.
3 2
5
2
−
u ≈ 0, 336 u
2 2ln2
7.
224
11
− 12ln p u3 ≈ 14 , 992 u3
11
3
4
8.
4
e + 1 4
− e + 1
2 e + 1 . ln
2
p ≈ 8, 932 u3
4
2 e +1
9.
p 3
u ≈ 0, 785u3
4
(
)
(
)
304 p 3
u ≈ 318, 348 u3
10.
3
32 p 3
u ≈ 33, 510 u3
11.
3
5e 2
79
+ 3e − p u3 ≈ 34, 623 u3
12.
24
6
35
13. − 16ln2 p u3 ≈ 1, 811u3
3
3
5
2
2
4e
e
4e 2 139 3
3
− +
−
14.
p u ≈ 23, 228 u
2
3
30
5
6
15. 2e − + p − 2 p u3 ≈ 13, 732 u3
e
15 + ln2
16.
u ≈ 7 , 846 u
2
p
17. 1 + u ≈ 2, 571u
2
34 + 3
18. 50 ln
+ 6 34 u ≈ 63, 427u
5
534
Cálculo II
26 13 − 16
19.
u ≈ 2, 879 u
27
Y
60
V’
50
40
30
20
10
0
1
2
b) v (=
t ) 200000 +
c) v (4=
) 200000 +
3
∫
t
0
∫
v (10=
) 200000 +
4
0
∫
4
5
6
X
( x 2 + 10x + 24) dx
( x 2 + 10 x + 24) dx
10
0
( x 2 + 10 x + 24) dx
d) En el 2010.
22. a) El auto B.
b) La diferencia entre las distancias recorridas por los autos A y B.
c) El auto A.
d) El tiempo estimado es de 7 , 348 minutos.
−8 , f (3) =
−2, f (6) =
−10
23. a) f (−3) =
f (9) =
−1, f (12) =
−6
b) Puntos de máximo local : (3; −2) , (9; −1) .
Puntos de mínimo local : (−3; −8) , (6; −10) .
c)
Y
0
X
(9, –1)
(3, –2)
(–6, –4)
f
(12, –6)
(–3, –8)
(6, –10)
d) Punto de máximo
absoluto: (9, –1)
Punto de mínimo absoluto: (6, –10)
t 37u
3u
24. a) P (t ) =
100 + 2
−
du
0 u + 4
2
∫
b) Aproximadamente 143 bacterias.
c) A las 12 horas.
d) Después de 12 horas.
Capítulo 3
d)
Ejercicios y problemas propuestos 3.1
Z
e)
z
Z
z
1.
a)
Z
b)
z
Z
x
X
0
Y
y
x
Y
X
0
X
Y
y
y
Y
Xx
f)
c)
Z
Z
z
x
Xx
z
Y
X
Y
y
Respuestas a los ejercicios y problemas propuestos
535
2. a)
Z
b)
z
Z
z
c) −
Yy
X
x
0
X
x
Y
y
−
+
=
1
9
4
36
S es un hiperboloide de dos hojas con centro en C (1; 1; 1) cuyo eje de simetría es paralelo al eje Z.
Z
c)
Z
z
Y
X
x
y
Ejercicios y problemas propuestos 3.2
(x + 1)
6
2
+
( y − 3)
2
3
(z − 2)
−
d)
2
2
=
0,
S es un cono elíptico de vértice V (−1; 3; 2)
cuyo eje de simetría es paralelo al eje Z.
Z
X
x
0
1. a)
(x − 1)2 ( y − 1)2 (z − 1)2
(x − 1)2
1
0
Y
y
2
y 2 ( z − 2)
0
+
−
=
2
2
S es un cono elíptico de vértice V (1; 0; 2)
cuyo eje de simetría es paralelo al eje Z
Z
z
z
V (1; 0; 2)
V (−1; 3; 2)
x
x
0
X
y
Y
X
e)
b)
(x − 1)2 ( y − 2)2
+
=
z + 3,
9
4
S es un paraboloide elíptico de vértice
V (1; 2; −3) cuyo eje de simetría es para­lelo al eje .
Z
1
(x − 1)2 + ( y − 2)2 − (z − 3)2 =
S es un hiperboloide de una hoja con
centro en C (1; 2; 3) cuyo eje de simetría es
paralelo al eje Z.
Z
536
Cálculo II
X
Y
V (1; 2; −3)
z
V (1; 2; 3)
z
x
x
y
Y
y
X
y
Y
2
2
2
3
3
9
f) x − + y 2 + z − =
2
2
4
i) −
S es una esfera de centro C (3/ 2; 0; 3/ 2)
y radio 3/ 2.
Z
z
x 2 ( z − 2)
+
=
y
9
4
S es un paraboloide hiperbólico (silla de
montar) de vértice V (0; 0; 2) cuyo eje de
simetría es paralelo al eje Y .
Z
z
C (3/ 2; 0; 3/ 2)
y
g)
(x + 2)2 ( y + 3)2 (z − 2)2
18
−
y
Y
X
x
+
24
V (0; 0; 2)
x
X
0
12
=
1
2. a)
Z
z
S es un hiperboloidede una hoja con centro
en C (−2; −3; 2) cuyo eje de simetría es paralelo al eje Y .
x
Z
z
0
X
y
C (−2; −3; 2)
b)
x
Y
X
Z
y
Y
Y
h) −
(x − 2)2 ( y − 4)2 (z − 4)2
16
−
+
8
4
X
=
1
c)
Z
S es un hiperboloide de dos hojas con centro en C (2; 4; 4) cuyo eje de simetría es paralelo al eje Z.
Zz
x
X
0
0
Y
y
C (2; 4; 4)
Y
y
X
x
Respuestas a los ejercicios y problemas propuestos
537
d)
Z
x
c)
z
Y
X
e)
Z
z
Z
y
z
Y
X
x
y
d)
Z
x
0
X
Y
z
y
f)
x
Z
Y
X
y
z
x
Y
X
e)
Z
S2: y + z = 3
3. a)
Z
3
z
Y
Y
x
X
y
X
S1: z = x2 + y2 –9
b)
Z
f)
z
Z
S3 : y =−5 − 4 − x 2 − z 2
x
X
Y
y
S1
S3
X
538
Cálculo II
S2 : y =5 + 4 − x 2 − z 2
S1 : x 2 + z 2 =
4
S2
Y
4.
λ +1
(x − 1)2 + ( y − 1)2 − (z − 2)2 =
a) Cono elíptico si λ = −1
b) Un hiperboloide de una hojas si λ > −1
c) Un hiperboloide de dos hojas si λ < −1
5. a) x 2 + αy 2 + α3 z 2 − 4x + 4 y + 4 =0
3
C − 2
; −1; 0 y eje de simetría parale α −9
lo al eje X. En particular, si α =0, la ecuación representa un cono elíptico de vértice
1
V ; −1; 0 cuyo eje de simetría es parale3
lo al eje X.
c) x 2 + α 2 y 2 + 2x + 2 y + (α − 2) z 2 − 3 =0
i) Si α =0 la ecuación resultante es
i) Si α =2 , la ecuación resultante es
2
x − 2) + 4 y =
0
(
que corresponde a una superficie cilíndrica
parabólica.
ii) Si α ≠ 0 la ecuación resultante es
(x − 2)2 + α y +
2
2
4
3 2
+α z =
α
α
ii1) Si α > 0, la ecuación representa un elip2
soide con centro en el punto C 2; − ; 0 .
α
ii2) Si α < 0, la ecuación representa un hi perboloide de una hoja con centro en
2
C 2; − ; 0 y eje de simetría paralelo
α
al eje X.
(
)
b) α 2 − 9 x 2 + 2 y 2 + z 2 + 6x + 4 y + 1 =0
2
i) Si α − 9 =0, la ecuación resultante es
( y + 1)
2
+
z2
1
=
− x − , que corresponde a
6
6
3
un paraboloide elíptico.
ii) Si α 2 − 9 ≠ 0, la ecuación resultante es
2
3
α2
2
2
( α 2 − 9) x + 2
+ 2 ( y + 1) + z = 2
α − 9
α −9
2
ii1) Si α − 9 > 0, la ecuación representa un
elipsoide
con
centro
en
el
punto
3
C − 2
; −1; 0 .
α −9
2
(x + 1)
2
1
y +
4
1
+
=
17
16
17
4
que corresponde a un cilindro recto
elíptico.
Si α =0, la ecuación resultante es
2
z −
(x + 1)2
=
y − 2, que corresponde a un
2
paraboloide hiperbólico.
ii) Si α − 2 ≠ 0, la ecuación resultante es
(x + 1)2 + α 2 y +
2
1
1
+ (α − 2) z 2 = 3 + 2
2
α
α
ii1) Si α > 2, la ecuación representa un elip-
soide con centro en el punto
1
C −1; − 2 ; 0
α
ii2) Si α < 2 , α ≠ 0 ,
la ecuación representa
un hiperboloide de una hoja con centro
1
en C −1; − 2 ; 0 y eje de simetría para
α
lelo al eje Z.
6.
(x − 1)2 + ( y − 1)2 =z − 1
7.
−
(x − 1)2 ( y + 1)2 (z − 2)2
5
+
5
−
5
=
1
ii2) Si α 2 − 9 < 0, la ecuación representa un
hiperboloide de dos hojas con centro en
Respuestas a los ejercicios y problemas propuestos
539
Ejercicios y problemas propuestos 3.3
b)
−
+
=
1
4
4
2
S es un hiperboloide de una hoja con centro
en C (1; 2; 3) cuyo eje de simetría es paraleloal eje Y .
1. a)
Z
(x − 1)2 ( y − 2)2 (z − 3)2
z
z
Z
X
Y
x
b)
Z
z
c) −
Y
y
(x − 1)2 ( y − 2)2 (z − 2)2
−
+
=
1
4
6
3
S es un hiperboloide de dos hojas con centro en C (1; 2; 2) cuyo eje de simetría es paralelo al eje Z.
0
x
0
Xx
y
Y
X
y
Z
z
0
c)
x
Z
z
x
d)
Y
X
y
d)
X
Y
(x − 1)2 ( y − 2)2 (z − 1)2
4
+
−
9
Z
2. a)
Y
X
(x − 1)2 ( y − 2)2 (z − 1)2
+
+
x
=
1, S es un
540
Cálculo II
X
X0
Y
y
z
Y
y
(x − 3)2 (z − 4)2
+
=
− ( y − 2)
3
3
S es un paraboloide elíptico de vértice
V (3; 2; 4) cuyo eje de simetría es paralelo al
e)
x
z
y
9
1
4
elipsoide con centro en C (1; 2; 1)
Z
=
0
S es un cono elíptico de vértice V (1; 2; 1)
cuyo eje de simetría es paralelo al eje Z.
Zz
x
36
y
eje Y .
c)
Z
Z
S3 : y + z = 16
S2 : x2 + y2 = 16
0
Y
X
x
y
X
(x − 2)2 ( y − 1)2
z−2
+
=
8
18
S es un paraboloide hiperbólico (silla de
montar) de vértice V (2; 1; 2) cuyo eje de
simetríaes paralelo al eje Z.
f) −
Z
x
z
0
X
Y
0
Y
S1 : z =
− 16 − x 2 − y 2
3
4. a) x 2 + (α − 1) y 2 + (α − 2) z 2 = 9 − α 2
i) Si α =1 la ecuación resultante es
8 que corresponde a un
x 2 − z 2 =
cilindro recto hiperbólico.
Si α =2 la ecuación resultante es
x2 + y 2 =
5 que corresponde a un cilindro
recto circular.
ii) Para α ≠ 1 y α ≠ 2
y
ii1)Si α > 3, no existe solución real.
ii2) Si 2 < α < 3 , la ecuación representa un
elipsoide con centro en el punto C (0; 0; 0) .
3. a)
Z
S3 : y + z = 4
S2 : y = –1
Y
X
ii4) Si −3 < α < 1 , la ecuación representa
un hiperboloide de dos hojas con centro
en C (0; 0; 0) . y eje de simetría paralelo al
eje X.
S1 : x2 + z2 = 4
b)
Z
ii3) Si 1 < α < 2 , la ecuación representa
un hiperboloide de una hoja con centro
en C (0; 0; 0) . y eje de simetría paralelo
al eje Z.
z
ii5) Si α < −3 , la ecuación representa un
hiperboloide de una hoja con centro en
C (0; 0; 0) . y eje de simetría paralelo al
eje X.
x
X
y
Y
2
2
(
)
b) 9 ( x − 2) − 25 ( y + 3) − αz 2 = α 2 α 2 − 4
i) Si α =0, la ecuación resultante es
2
2
0
(x − 2) − ( y + 3) =
que corresponde a una superficie cilíndrica (cilindro recto).
Respuestas a los ejercicios y problemas propuestos
541
Si α =2, la ecuación resultante es
2
2
− ( x − 2) + 25 ( y + 3) + 2z 2 =
0, que co
rresponde a un cono elíptico de vértice
V (2; − 3; 0) cuyo eje de simetría es paralelo
al eje X.
Si α = −2, la ecuación resultante es
2
2
que
co9 ( x − 2) − 25 ( y + 3) + z 2 =
0,
rresponde a un cono elíptico de vértice
V (2; − 3; 0) cuyo eje de simetría es paralelo
al eje Y .
ii) Para α ≠ 0 y α ≠ ±2
ii1) Si α > 2 , la ecuación representa un hiperboloide de dos hojas con centro en
C (2; −3; 0) y eje de simetría paralelo
al eje X.
ii2) Si 0 < α < 2, la ecuación representa un
hiperboloide de una hoja con centro en
C (2; –3; 0) y eje de simetría paralelo
al eje X.
iii)
x2 y 2
2
0,
+
− ( z − 1) =
4
9
iv)
x2 y 2
+
=z + 1,
4
9
x2 y 2
+
=
− ( z − 1)
4
9
c) Para valores de a < 4.
v)
d) Para valores de a > 4.
e) Para
f) i) Cono elíptico: a = 4.
ii) Hiperboloide de una hoja: a > 4.
iii) Hiperboloide de dos hojas: a < 4.
Capítulo 4
Ejercicios y problemas propuestos 4.1
1. a) Dom =
(f)
{ ( x; y ) ∈ 2 / y − x − 3 > 0 ∧ 9 − x 2 − y 2 > 0 }
Y
ii3) Si −2 < α < 0 , la ecuación representa
un hiperboloide de dos hojas con centro
en C (2; − 3; 0) y eje de simetría paralelo
al eje Y .
Ii4) Si α < −2, la ecuación representa un hiperboloide de una hoja con centro en
C (2; −3; 0) y eje de simetría paralelo
al eje Y .
(x − 2)2 ( y + 1)2
4
3
2
1
−4
−3
−2
0
−1
1
2
3
4
X
−1
−2
−3
−4
2
zα −2
b)
1
5.
−
+
=
Dom=
( g ) ( x; y ) ∈ 2 / 3 ≤ y ≤ 5 ∧ x ≥ 3 ∧ x < 5 ∧ x ≠ 4
25
9
9
Dom ( g) =
> ( x; y ) ∈ 2 / 3 ≤ y ≤ 5 ∧ x ≥ 3 ∧ x < 5 ∧ x ≠ 4
a) α = ±2 b) α = ± 3
{
{
}
Y
6. a) No existe la traza pues, si z = 0, tendría0 que no tiemos la ecuación x 2 + y 2 + 4 =
ne solución real.
x2 y 2 z2
b) i)
+
+
= 1, k ≠ 0
4
9 k2
x2 y 2 z2
ii)
+
−
= 1, k ≠ 0
4
9 k2
5
4
3
2
1
−5
−4
−3
−2
−1
0
−1
−2
−3
−4
−5
542
Cálculo II
1
2
3
4
5
X
}
c)
Dom (h=
)
{ (x; y) ∈ 2 / 0 ≤ x2 + y2 ≤ 16 ∧ x2 − y2 > 0 ∧ x2 + y2 > 4 }
y 2 x2
b) i) Dom ( g=
) (x; y) ∈ 2 / − ≥ 1
9
4
Y
0
0
X
ii)
d) Dom
=
(k)
{ (x; y; z) ∈ 3 / z ≥ 0 ∧ 4 − x2 − y2 − z ≥ 0}
y
e) Dom (l) = ( x; y; z) ∈ 3 /
> 0
xz
0
2. a) i) Dom ( f ) = 2
Y
[ 5; + ∞
iii) Ran ( g=
)
2
2
c) i) Dom (h) =( x; y) ∈ 2 / ( x − 3) + ( y − 3) ≤ 1
0
16
X
25
Y
8
ii)
6
Z
4
2
X
iii) Ran ( f=
)
[ 4; + ∞
0
−2
Y
0
2
4
6
8
X
−2
ii)
−4
Z
−6
X
Y
Respuestas a los ejercicios y problemas propuestos
543
b)
[ − 7; 3 ]
iii) Ran (h) =
d)
2
Y
2
i) Dom ( j) = ( x; y) ∈ 2 / ( x − 2) − ( y − 3) ≤ 1
4
36
Y
0
c)
–6
–4
–2
0
X
Y
X
–2
–4
–6
–8
ii)
0
X
Z
0
Y
5.
2
Sg : ( x − 1) + ( y − 1)2 + ( z − 1)2 =
9
Z
X
iii) Ran ( j) =
3.
−∞ ; 4]
(−3; −4) y (7 /5; 24/5)
4. a)
Y
X
Y
6.
1
C ( x; y) = 10xy + 96 +
x
7. a) P ( x; y) =x + 2 y +
0
b) A ( x; y) =xy +
X
8.
1
, x > 0, y > 0
y
px
, x > 0, y > 0
2
px 2
, x > 0, y > 0
8
C ( x; =
y) 800 x 2 + 900 + 500 y , x ≥ 0, y ≥ 0
B2 − b2
A ( B; b; α)
9. =
tan α , B > b > 0 , α > 0
4
544
Cálculo II
Ejercicios y problemas propuestos 4.2
2. a) L = 3
d) L = 1/ 4
b) L = 0
c) L = 7 /12
e) L = 3/ 2
f) L = 1
2. a) Dom ( f ) = 2
Z
g) L = 1 / 3 h) L = −3
3. a) f no es continua en P (0; 0) .
0
b) f es continua en A (1; 0) .
c) f es continua en B (0; 0) .
4.
Y
X
b) Dom ( g) = 2
Z
π
A=
− +1
2
5. a) f es continua en todo 2 .
b) f es continua en todo 2 .
Ejercicios y problemas propuestos 4.3
2
x2
2 ( y + 1)
h) ( x ; y ) ∈ /
− ≤1
c) Dom (=
4
4
1. a)
Dom
=
(f)
Y
X
{ (x; y) ∈ 2 / x2 − y2 ≥ 0 ∧ −1 ≤ x + y ≤ 1∧ xy > 0 }
Z
Y
X
0
b) Dom ( g) =
{ (x; y) ∈ 2 / x2 + y2 < 9 ∧ xy > 1 }
0
2; S es un hiperboloide
b) S : − x 2 + y 2 − z 2 =
de dos hojas con centro en C (0; 0; 0) cuyo
eje de simetría es el eje Y .
X
2
c) S : y=
x 2 + z 2 ; S es un cono elíptico de
vértice V (0; 0; 0) cuyo eje de simetría es el
eje Y .
c)
Dom
=
( h)
{ ( x; y ; z) ∈
2
/ x + y + ( z − 2) ≤ 4 ∧ x + y ≤ z
2
2
Y
3. a) S : x 2 − y 2 + z 2 =
4; S es un hiperboloide de
una hoja con centro en C (0; 0; 0) cuyo eje de
simetría es el eje Y .
Y
3
0
X
2
2
2
}
4.
81
C : x2 + y 2 =
4
5. C ( x;=
y) 400 x 2 + 108 + 300 y 2 + 320 + 200(50)
Respuestas a los ejercicios y problemas propuestos
545
6. a) I ( x; y) =
−2 x 2 − 3y 2 + 2 xy + 150 x + 200 y
5. a) f x ( x; y) =
b) U ( x; y) =
−2 x 2 − 3y 2 + 2 xy + 185x + 245 y − 9500
b 2=
, L 13/ 24
7.=
8. a) L = 1 / 2,
b) L = 6
f y ( x; y ) =
9. a) f no es continua en (0; 0)
Ejercicios y problemas propuestos 5.1
1. =
a) f x (2; 1) 1=
y f y (2; 1) 1 / 2
b) gx (2; 2) 1=
=
/ 4 y g y (2; 2) 1/ 4
2. a) El límite no existe.
b) f x (0; 0) 0=
=
y f y (0; 0) 0
=
f y ( x; y )
c)
6.
b) U x (16; 16) = 1, 25
Interpretación: cuando se gastan S/ 16 000
anuales en publicidad en periódicos y el
gasto en publicidad en televisión permanece constante en S/ 16 000 anuales, la utilidad aumenta a razón de S/ 1250 por cada
incremento de S/ 1000 anuales en el gasto
en publicidad en periódicos.
546
Cálculo II
x
cos
x
x e y sen
y
2
y +
x
2
x + y2
f x ( x; y=
; z) e xz (1 + xz)
f x (1; 2) ∃ , (1; 2) no pertenece al Dom ( f ) .
7. a) homogénea de grado 2.
b) homogénea de grado 0.
c) homogénea de grado 3.
b) I x (5; 6) = 158
4. a) U=
(x; y) 9x1/ 4 y3/ 4 − x − y
y x2 + y 2
f ( x; y=
; z) e yz (1 + yz)
y
f x;=
y; z) x 2 e xz + y 2 e yz
z (
3. a) I ( x; y) =
−5x 2 + 100 x + 18xy − 10 y 2 + 200 y
Interpretación: cuando el precio de venta
del producto en el centro de distribución A
es de S/ 5 y el precio del producto en el centro de distribución B es de S/ 6, el ingreso
aumenta a razón de S/ 158 por cada incremento de un sol en el precio de venta del
producto en el centro de distribución A.
x2 + y 2 − x
y
y −
b) f x ( x; y) =
−
2
y
x + y2
b) A = 1/ 6
Capítulo 5
x2 + y 2
x
cos
x
e y sen
b) g no es continua en (1; −3)
10. a) B = 9,
1
9.
Q: y=3
10. En el punto (1/ 2; 0; p/ 2) .
11. LT : z − 3= 2 ( x − 1) , y= 2
p
4
12. a) PT : −2 x + + 2p y − z + 2 + =
0
2
p
p
LN : (=
x ; y ; z ) ; 0;
4
4
2 + t −2; + 2p; − 1 , t ∈
p
1
b) PT : x + y − z − 1 =
0
p
1
LN : ( x; y ; z)= (0; 2; 1) + t ; 1; − 1 , t ∈
p
3p
3
3p
c) PT :
x+ y−z−
+2=
0
8
4
8
3p 3
LN : ( x; y; z)= (1; 0; 2) + t ; ; −1 , t ∈
8 4
0
13. PT : x − 4 y − z + 1 =
2
2
y ( y − 1) 1 y
z ∂2z
14. ∂ z + ∂=
+ 2 5x y
+ + lnx + ln2 x
2
2
∂x
∂y∂x
∂y
x
x
x
6. El error que se comete al calcular la capacidad
del recipiente es aproximadamente de 4,398 m3.
7. El error que se comente en el cálculo de la longitud de la hipotenusa es aproximadamente
de 0,262 m.
Ejercicios y problemas propuestos 5.2
8. La cantidad de pintura que se requiere es de
aproximadamente 0,019 m3.
0, 001169
1. a) ∆ f (2; 1) =
9. La utilidad no varía.
b) df ( x; y) = 0, 001167
10. Es el 5%.
c) f (2 , 001; 1, 002) ≈ 2, 001167
11. a) La cantidad aproximada de cobre que se
retira de los 1000 tapones es 165 cm3.
0, 081
2. a) ∆ f (2; − 2; 0, 5) =
0, 085
b) df (2; −2; 0, 5) =
b) La cantidad aproximada a pagar al tornero
es de S/ 330.
c) f (2, 01; −1, 98; 0, 48) ≈ 0, 085
3. a) Dom ( f=
x ) Dom ( f=
y)
{ ( x; y ) ∈ 2 / x 2 − y 2 > 0 }
Y
Ejercicios y problemas propuestos 5.3
1. a) −375p cos 2 (pt ) sen (pt ) +
0
b) 58, 042
X
16p
2pt
sen
3
3
2. a) 0
b)
−14 (ln (3 − t ))
3−t
+ 15 sen2t cos t − 112e14t − 56 e 7t sent − 8 e 7t cos t − 2 sen
−14 (ln (3 − t ))
2
14t
7t
7t
t − 112
∈ sen
2 /tycos
− senx
> e0 − 56 e sent − 8 e cos t − 2 sen (2t )
(x; y+)15
3−t
b) Dom ( fx ) = Dom ( f y ) =
{
}
Y
3. a) El área aumenta a razón de 16 cm 2 /min.
b) El área disminuye a razón de 8 cm 2 / min.
4. El área del anillos circular aumenta a razón de
El área del anillo0 circular aumenta a razón de 16, 336 cm 2 / min
X
5. Después de 10 meses la demanda aumenta a
razón de 849, 2 unidades/mes.
6.
4. El error que se comete al medir el área es
aproximadamente de 18,712 m2.
5. El error que se comete al calcular la distancia
entre las personas es aproximadamente de
0,011 m.
LT : y =
−3t + 1
7. –4
8.
48x + 35y − 80z + 20p − 22 = 0
9. 0
10. Dentro de cuatro meses la demanda aumen­
tará a razón de 16 televisores por mes.
11. Después de 2 minutos la temperatura aumenta a razón de 2, 051 ºC/min.
Respuestas a los ejercicios y problemas propuestos
547
c) ∇f (0;1) =
(0;1)
=
x 24
=
e y 10, el área de la región
12. Cuando
rectangular disminuye a razón de 80 cm 2 /s.
Y
13. a) Cuando el radio mide 50 cm y la altura
150 cm, el volumen aumenta a razón de
70685, 835 cm 3 /s.
6
5
4
b) Cuando el radio mide 50 cm y la altura 150
cm, para que el volumen sea constante la
altura debe decrecer a razón de 30 cm /s.
(0; 1)
3
2
1
0 P(0; 1)
−4
14. Cuando x = 10 m y θ = p / 4 rad, el área
de la región triangular aumenta a razón de
1, 941m 2 /h.
15. g′ (1) = 20
y
7
−3
−2
−1
1
2
x
3
4
X
d) ∇f (2;1;1) =
(4; 2; −2)
2. a) i) −7 2 ≈ −9, 90
ii) Máxima: –10, dirección (6; − 8) .
Ejercicios y problemas propuestos 5.4
b) i) 0,1
4
3
1. a) ∇f (3; − 4)= ; −
5
5
Y
Mínima: –10, dirección (−6; 8) .
6
Mínima: −
5
4
3
c) i)
2
1
−6
−5
−4
−3
−2
−1
0
1
2
3
4
5
6
−1
X
−2
−3
7
≈ 0, 583
12
P(3; –4)
4
3
∇f (3; − 4)= ; −
5
5
Mínima: −
−5
−6
b) ∇f (1; 0) =
(0; 2)
4
y
3
4.
(0; 2)
2
1
x
−4
−3
−2
−1
0
−1
−2
1
P(1; 0)
2
3
4
5.
−4
Cálculo II
2 (ln2)
2
7
≈ 0, 583 dirección: (2; 3; 6) .
12
7
≈ − 0, 583, dirección: (−2; − 3; − 6) .
12
≈ 3, 884
b)
1− 3
≈ − 0 ,183
4
36 77 4 3
u=
− ;− , u =
;−
85 85
5 5
5
2
X
≈ 3, 536
17
≈ −3, 4
5
6.
−
7.
14 34
≈ 4 , 802
17
−3
548
2+ 3
3. a)
1
.
2
2
≈ − 0 , 707 , dirección: 1 ; − 1 .
2
2
2
ii) Máxima:
−4
Y
2
≈ 0 , 707 , dirección: − 1 ;
2
2
ii) Máxima:
8. a) No.
d)
b) 10 ≈ 3,162
c) π rad. o 180°
e) 4
f)
=
a 1=
, b
9. a) Noroeste
espárragos a la cadena de supermercados,
su utilidad permanece constante cuando
se incrementa en 1 tonelada la cantidad de
alcachofas vendida.
3
5
b) Dirección de máxima pendiente: (−10; 9) .
4.
Máxima pendiente: 181 ≈ 13, 454.
10. a) La concentración de gas disminuye a razón
mg
de 15
cm 3
b) La mínima razón de cambio es −15 y ocurre en la dirección (−15; −15; 0) .
20 5
≈ 14 , 907
3
b) La máxima razón de cambio es 19 y se da
en la dirección (15; 10; 6) .
11. a)
0
5. a) 6 x − y − z − 5 =
b) y0 = 4; ( x; y; z) = (1/ 4; 4; − 121/ 4) + t (1; 0; 6)
6.
b) U(16; 16) = 256. Cuando los gastos en publicidad en paneles y en publicidad en
televisión son en ambos casos $ 16 000, la
utilidad anual de la empresa es de $ 256 000.
U (16; 16) = 3,5. Cuando los gastos en publi x
cidad en paneles y en publicidad en televisión son en ambos casos $ 16 000, la utilidad
anual de la empresa aumenta a razón de
$ 3500 por $ 1000 de aumento en el gasto en
publicidad en paneles, manteniendo constante el gasto en publicidad en televisión.
2.
3.
(1; 0; 0)
a) U ( x; y) =−6x 2 − y 2 + 3xy + 6 x + y − 2
b) U (1; 2) = 2. Cuando la empresa vende 1 to-
nela de alcachofas y 2 toneladas de espárragos a la cadena de supermercados, su
utilidad es de S/ 2000.
U x (1; 2) = 0. Cuando la empresa vende
1 tonelada de alcachofas y 2 toneladas de
m = 28; punto de contacto: (−8; 4; −241)
7. a) U ( x; y) =
−2x 2 − 2 y 2 + 4xy + 450x + 550 y
b) U (3; 6) = 4632; cuando se importan y
venden 300 unidades del modelo A y 600
unidades del modelo B la utilidad de la empresa es de $ 463 200.
Ejercicios y problemas propuestos 5.5
1. a) U
=
(x; y) 18x1/ 4 y3/ 4 − x − y
fr (3; 5; 12)= 44π ≈ 138, 230. Cuando los radios
mayor y menor son respectivamente de 5 y 3
cm y la altura mide 12 cm, el volumen del vaso
aumenta a razón de 138,23 cm3 por cada cm3
que aumente el radio menor.
U (3; 6) = 462; cuando se importan y ven x
den 300 unidades del modelo A y el número de unidades importadas del modelo B
se mantiene constante en 600, la utilidad
anual de la empresa aumenta a razón de
$ 462 por cada unidad importada y vendida del modelo A.
8.
E( Área) ≈ 0, 48 cm 2 ; E.P.( Área) ≈ 0, 24 %
9. a) Se retira aproximadamente 96,761 cm3 de
cobre.
b) Aproximadamente S/ 241, 90.
10. E.P. ( I ) ≈ 3 %
11. E.P. ( R) ≈ 0, 2 %
12. a) ( B + b) hL / 2
b) E (V ) ≈ 0, 079 m 3 ; E.P. (V ) ≈ 0, 262 %
13. –2
14. Dentro de tres meses la utilidad del fabricante
aumenta a razón de $ 9744,16 al mes.
15. Cuando x = 12m y θ = π/ 6 rad , el área disminuye a razón de 2, 065 m 2 / min.
Respuestas a los ejercicios y problemas propuestos
549
16. Cuando R = 500 ohmios e I = 0 , 03 amperios , la
intensidad disminuye a razón de 0, 0004 amp/s
17. a) ∇f (−1; 1; 1) =(−4; 6; − 2) b) 4 3 / 3
−16/ 5
18. a) Dv f (−1; 2) =
b) 17
19. λ =7 / 24
15, b =
−5, c =
−10
20. a =
Punto de silla:
2ln2 + 3p + 12
1; 1; 1;
= (1; 1; 1; 5, 703) .
4
1 1
2. C ( x; y) =
6xy + 384 +
x y
La base es un cuadrado de 4 cm de lado y altura de 6 cm.
3. Cada polo se debe vender a S/ 25.
Capítulo 6
Ejercicios y problemas propuestos 6.1
1. a) Punto de silla: (−2; − 3; − 2629) , máximo
3203
local: f (−2; 3) =
Mínimo local: f (2; −3) =−3141, punto de
silla: (2; 3; 2691) .
4.
b) Mínimo de local: g (1; −1) =
c) Punto de silla: (0; 0; 0) , máximo local:
1
h (−1; −1) = ≈ 0 , 368.
e
Máximo local: h (1; 1)=
1
≈ 0 , 368.
e
1
Mínimo local: h (−1;1) = − ≈ −0, 368.
e
1
Mínimo local: h (1; −1) = − ≈ −0, 368.
e
d) Máximo local: i (1; =
1)
1
e2
≈ 0,135.
e) Punto de silla: (0; 0; −1; 6) , Punto de silla:
(0; 0; 1; 6) .
Punto de silla:
5
−
; − 1; 0; 11 =
(−1,118; − 1; 0; 11) .
2
Punto de silla:
5
; − 1; 0; 11 =(1,118; − 1; 0; 11) .
2
f) Punto de silla:
2ln2 + 3p + 20
1; 1; 0;
= (1; 1; 0; 7 , 703) .
4
550
Cálculo II
4. La base es un cuadrado de 2 m de lado y altura de 1 m.
abc 3
5. Volumen máximo:
u .
27
6. 2 minutos en televisión y 4 minutos en radio.
7. En Ica 54 toneladas y en Trujillo 10 toneladas.
8. En publicidad S/ 6000 y en desarrollo del
pro­­ducto S/ 5485 aproximadamente.
Ejercicios y problemas propuestos 6.2
50.
1. Valor máximo condicionado: f (6; −8) =
−50.
Valor mínimo condicionado: f (−6; 8) =
2. El punto más cercano a A (2; 1; 1) es B (4; 2; 2) .
El punto más alejado de A (2; 1; 1) es
C (− 4; − 2; −2) .
3. Valor máximo condicionado: f (4; 4; 2) = 4.
4. Valor máximo condicionado:
ar
f
;
a2 + b2
br
2
2
=
r a +b
2
2
a +b
Valor mínimo condicionado:
−ar
−br
f
;
− r a2 + b2
=
2
2
2
2
a +b
a +b
5. Valor máximo condicionado:
au2
bv 2
f
;
=
2 2
2 2
2 2
2 2
a u +b v
a u +b v
a 2 u2 + b 2 v 2
Valor mínimo condicionado:
2
2
−au
−bv
f
;
2 2
2 2
2 2
a u + b2 v 2
a u +b v
− a 2 u2 + b 2 v 2
=
6. Largo: 8/3u, ancho: 2u.
7. 25 galones de cada color.
Ejercicios y problemas propuestos 6.3
4
1. a) Valor mínimo relativo: f (2; − 4) =
b) Valor máximo relativo:
9 9
81
g ; − ; 2 = + 12 2 ≈ 37 , 221
2
2
4
−16
c) Valor mínimo relativo: h (1; −3; 1) =
2. La caja es un cubo de 8 cm de lado.
Capítulo 7
Ejercicios y problemas propuestos 7.1
1
1. a) 2ln2 − ln3 ≈ 0, 837
2
c) (3 − 2ln2) ln3 ≈ 1, 773
e)
1
(1 − e) ≈ −0.859
2
g)
1
(cos 9 − cos1) ≈ −0, 242
6
h)
15e 4 − 35
≈ 32, 666
24
b)
p
≈ 0, 393
8
d) −
f)
2
≈ − 0, 637
p
4 2 −2
≈ 0, 406
9
2. a) Gráfica
3. Base: es un cuadrado de 8 m de lado.
Y
4. Temperatura mínima: –9 grados. Tempera­
tura máxima: 9 grados.
5. a) Valor mínimo local condicionado:
f (2; 2) = f (−2; − 2) = 32.
b) Valor mínimo local condicionado:
f (− 4; =
− 2) f (4=
; 2) 16.
3
y = lnx
Valor máximo local condicionado:
f (4; − 2) =f (−4; 2) =
−16.
D
0
c) Valor mínimo local condicionado:
X
y = –lnx
f −3; 0) =
−27 , f (1; 2) =
9.
(
–3
Valor máximo local condicionado:
f 3; 0 =27 , f (−1; − 2) =−9.
( )
x = e–3
d) Punto de silla: (−1; 1; 9; − 10 , 5) .
e) Valor mínimo local condicionado: 15.
6.
(2; 4)
7.
5x + 4 y + 40 2 =
0
8.
260, 290, 140 toneladas.
9.
6x + 8y + 3z − 14 2 =
0
b)
72
1 − 16e −15 ≈ 2, 88
25
(
)
Respuestas a los ejercicios y problemas propuestos
551
3. a) Gráfica
Ejercicios y problemas propuestos 7.2
x=1
Y
=
y
4−x
=
y
V
1. =
x+4
D
–4
0
4 X
1
2.
A ≈ 1u2
3.
14p
≈ 14, 661
3
4.
63 3
67 3
V (E1 ) =
u ≈ 15, 75u3 ; V (E2 ) =
u ≈ 5, 583u3
4
12
64
V (E) =u3 ≈ 21, 333u3 =
V (E1 ) + V (E2 )
3
b) 2p − 4 ln 2 ≈ 3, 511
4. a) Gráfica 5.
Y
y=4–x
y=x+4
4
y = –x – 4
y=x–4
D
0
–4
4
X
–4
b) −512
5.
−27e 7 + 12e 4 + 27e −1 − 12e −4 ≈ −28944, 205
1
2 + ln
6
(
)
2 + 1 ≈ 0, 383
V
6.=
5p 3
u ≈ 3, 927 u3
4
V
7.=
5p 3
u ≈ 7 , 854 u3
2
V
8. =
32p
2 2 − 1 u3 ≈ 61, 271u3
3
(
)
2
9. =
V 6 7 p + − 2 u3 ≈ 28, 705 u3
3
22
10. V =
4p 5 15 − u3 ≈ 151,194 u3
3
6. 15 ln 2 − 9 ≈ 1, 397
=
V
11.
16p 3
u ≈ 16, 755 u3
3
3 3
3 3 − 23 2
8
)
V
12.=
16 3
u ≈ 1, 778 u3
9
b) 0
8 u3 ≈ 25,133 u3
13. V =p
7.
(
3
256
8. a)
9.
−p
=
14. V
e4
10. a)
b)
c)
552
8 3
u ≈ 0, 533 u3
15
∫ ∫
1
2 e16 − 4e 4 + 3
4e 2 y dydx =
− lnx
3
e4
lnx
p/ 4
tan y
−p / 4
2y 1
−
p 2
3
9− y2
−3
1
( y −9)
2
∫ ∫
∫ ∫
Cálculo II
8
2
x +1
dxdy =
2p (ln2 − 1)
2 ydxdy = −18
=
V
15.
224p 3
u ≈ 234 , 572 u3
3
3p 3
u ≈ 0, 589 u3
16
e 32 − 1
16. a) 36 p ≈ 0, 007
8e
b) 0
c) p (8 ln 2 − 18) ≈ 126, 369
Ejercicios y problemas propuestos 7.3
1. a) a)
2 (2 + p)
3
e)
p 4
e − 5 ≈ 38, 954
4
(
≈ 3, 428 b)
1
c) (1 − e) ≈ −0, 215
8
3
2. a) V = 256p u ≈ 804 , 248 u
b) V =
16p 3
u
3
)
p
d) − ≈ −1, 571
2
p
≈ 0, 785
4
3
=
c) V
224p 3
u ≈ 234 , 572 u3 3
d) V = 36p u3 ≈ 113, 097 u3
8 u3 ≈ 25,133 u3 e) V =p
3.
V =16p u3 ≈ 50, 265 u3 4.
V =2p u3 ≈ 6, 283 u3
5.
V=
6.
V = 216p cm3 ≈ 678, 584 cm3
7.
V =40p cm3 ≈ 125, 664 cm3
(96 + 18p) u3 ≈ 152, 550 u3
Respuestas a los ejercicios y problemas propuestos
553
Bibliografía
Apóstol, T. M. (2006). Calculus. Barcelona: Editorial Reverté.
Edwards, C. H. y Penny, D. E. (2008). Cálculo con trascendentes tempranas. México:
Pearson Educación.
Lages Lima, E. (1995). Curso de análisis matemático, vol. I. Rio de Janeiro: IMPA,
Serie Proyecto Euclides.
Larson, R. y Edwards, B. (2010). Cálculo. México: McGraw Hill.
Leithold, L. (1998). El cálculo. México: Oxford University Press.
Mett, C. y Smith, J. (1991). Cálculo con aplicaciones. México: Limusa.
Mitacc, M. y Toro, L. (2008). Tópicos de cálculo, vol. II. Lima: Thales.
Mitacc, M. (2008). Cálculo III. Lima: Thales.
Purcell, E., Vargerg, D. y Rigdon, S. (2003). Cálculo diferencial e integral. México:
Pearson Educación/Prentice Hall.
Stewart, J. (2008). Cálculo: trascendentes tempranas. México: Paidós.
Uña, I., San Martín, J. y Tomeo, V. (2008). Problemas resueltos de cálculo de varias
variables. España: Paraninfo.
Zill, Dennis G. (1987). Cálculo con geometría analítica. México: Grupo Editorial
Iberoamérica.
Bibliografía
555
Este libro se terminó de imprimir en mayo del 2019,
en Tarea Asociación Gráfica Educativa
Psje. María Auxiliadora 156-164, Breña, Lima, Perú
Teléfonos: 424-8104 / 332-3229
tareagrafica@tareagrafica.com
09-CALCULO II-BIBLIOGRAFIA.indd 556
22/04/2019 07:43:09