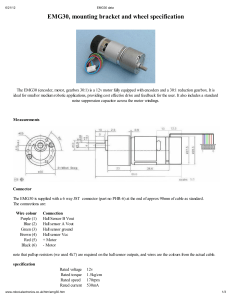
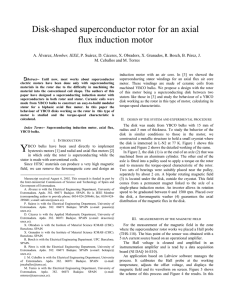
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/261284364 Design of a miniature axial flux flywheel motor with PCB winding for nanosatellites Conference Paper · August 2012 DOI: 10.1109/ICoOM.2012.6316334 CITATIONS READS 19 3,455 1 author: wu Junfeng Changchun Institute of Optics, Fine Mechanics and Physics 15 PUBLICATIONS 44 CITATIONS SEE PROFILE All content following this page was uploaded by wu Junfeng on 06 July 2017. The user has requested enhancement of the downloaded file. 2012 International Conference on Optoelectronics and Microelectronics (ICOM) Design of a Miniature Axial Flux Flywheel Motor with PCB Winding for Nanosatellites Junfeng Wu* Changchun Institute of Optics, Fine Mechanics and Physics Chinese Academy of Sciences Changchun, China e-mail: awublack@126.com motor development, many authors have also explored the axial flux motor application in the field of electric vehicle. As in [2], A novel low-speed axial-flux-modulated motor is proposed for in-wheel applications in hybrid electric vehicles. Electromagnetic field analysis method of axial motor also moves forward. Generally, there are several following categories. The first one includes the technique for static and Abstract—This paper presents the design and analysis of an axial flux permanent-magnet (AFPM) machine for nanosatellites application. It is a miniature axial flux surface mounted permanent magnet flywheel motor, using a printed circuit board (PCB) stator winding. The PCB stator has simplified the design and construction and avoids unnecessary space, since size reduction has become one of the most important aspects of flywheel motor design for nanosatellites. The performances of the machine are estimated by combination method of threedimensional (3D) electromagnetic finite element analysis (FEA) and approximate theoretical analysis. The back EMF and electromagnetic torque are derived. A comparison between the analysis and experimental measurement results of the prototype machine is also presented. Both simulated and experimental results show that the proposed motor would be an acceptable solution for the nanosatellite applications with advantages such as simple structure and low-cost, as multi-layer circuit board production techniques have made the production of printed circuit coils cheaper and easier. Keywords-Axial flux; electric motor; EMF;electromagnetic torque; flywheel; nanosatellite I. flywheel rotor motor rotor motor stator circuit board Figure 1. Structure of the proposed flywheel motor. transient analysis of AFPM machines using 3-D analysis with the availability of powerful software tools [3], and the time required is markedly considerable. The second way is that the disk machine is simplified to a 2-D FEM model to save solving time on the basis of not influencing the research result. The model length in the moving direction is equal to the arc length at the average radius [4]. The third way is that flux density distribution is described analytically and geometrically without FE analysis, as in [5][6]. back INTRODUCTION There has been an increased interest in using nanosatellites in space science missions due to hundreds of small nanosatellites can form an intelligent constellation of a distributed network of instruments to obtain measurements that are not possible with traditional single spacecraft architectures. Miniature flywheel is the key actuator in the nanosatellites, which when rotated increasingly fast causes the spacecraft to spin the other way in a proportional amount by conservation of angular momentum. As pancake shape is more useful for the angular momentum demanding, it has been difficult to design a radial flux motor that can achieve the required decrease in thickness. For this reason, the axial flux spindle motor has become a more suitable choice for this application due to its low profile. They also allow design flexibility and are relatively easy to manufacture. For example, a change in dimensions of a printed circuit stator can be accommodated without any major alterations to production equipment and processes. Figure 2. Rotor structure of the proposed flywheel motor. In this paper the back EMF and electromagnetic torque of the AFPM machines are predicted analytically based on magnetic field static 3-D analysis. Therefore, small amount of additional computational time is needed to determine the main parameters influencing machine performance. This method is faster than the transient 3-D FE method. (For this application It is well known that axial flux motor design software has been developed in more mature, as Ansoft Maxwell was used to analyze the electric car engine. It is easy to modify, easy to operate, and achieved good results [1]. With the axial flux 978-1-4673-2639-1/12/$31.00 ©2012 IEEE mechanical bearing 544 Aug,23-25,.2012 2012 International Conference on Optoelectronics and Microelectronics (ICOM) study. Mesh using triangular finite elements, during the static analysis, the system will automatically split the model and finish optimization. the motor current is very small, almost zero, then the magnetic field distortion is small. Armature reaction is negligible). II. AXIAL FLUX PERMANENT MAGNET MOTOR DESIGN A. The Structure of Disk Type Motor The axial flux flywheel motor is shown in Fig. 1, where the stator is composed of the shaft, bearing, and printed circuit board (PCB) winding. The PCB winding is designed to achieve an ultra thin and low weight stator. There are eighteen coils in the stator, and the rotor consists of the yoke and the twelvepole PM, as in Fig. 2. The AFPM stators are three-phase. Each stator has six coils per phase with 6 turns per coil printed on a two-layer circuit board, as in Fig. 3. Figure 5. Rotor structure of the proposed flywheel motor. A 3D model of FEA is shown in Fig. 5, and the motor air gap flux density distribution at the different radius of the circumferential is shown in Figure 6. Seen from the figure, the radial component of air gap flux density is a function of electrical angle for different radius. Distribution of the air gap flux density is almost sinusoidal along the air gap. R16 R18 R20 R22 R23 Flux density in the gap(T) 0 .4 Figure 3. Winding connections with concentrating winding The simplest coil is made up of a spiral pair located on neighboring layers. The spirals are joined by a via located at their common centre. As shown in Fig. 4, current enters the coil from a terminal on the outer radius side of the substrate. It flows inwards, towards the coil centre, through the tracks of one of the spirals, continues through the via at the centre of the spiral and then flows outwards, away from the coil centre, through the tracks of the second spiral. 0 .3 0 .2 0 .1 0 .0 -0 .1 -0 .2 -0 .3 -0 .4 -1 0 1 2 3 4 5 6 7 R o t a t in g A n g le ( R a d ) Figure 6. Air gap flux density, with radius 16 18 20 22 23 mm, when the gap high is 0.6mm. Figure 4. Printed circuit coil, (a) Top layer spiral, (b) Bottom layer spiral. B. Air-gap flux density distribution In order to analyze the performance of the motor, it is essential to estimate the air-gap flux density distribution. Analytical method may be a good choice, and effective means in theoretical analysis of AFPM motors. But if we want to see a more intuitive design result of air-gap effect and to analysis the reasonableness of the model structure, three-dimensional finite element method is a more appropriate choice. Time consumption is relatively small for the air-gap magnetic field distribution of the static analysis. Figure 7. Description of the concentrating winding III. A. Torque In order to analyze the performance of the motor, it is essential to estimate the required motor torque to drive the flywheel, and calculate the motor torque coefficient. Concentrating winding is used in this Disk motor, the valid In this paper, Ansoft Maxwell 3 D version finite element analysis software was used to calculate the air-gap magnetic field distribution, and the results provide a reference for further 978-1-4673-2639-1/12/$31.00 ©2012 IEEE PERFORMANCE ANALYSIS OF TORQUE AND BACK EMF 545 Aug,23-25,.2012 2012 International Conference on Optoelectronics and Microelectronics (ICOM) conductive winding is placed in the front of the permanent magnet. The position on this planer can be described by angle and radial theta, as Fig. 7.Distribution of the air gap flux density is sinusoidal along the air gap, and the gap flux density Bg (θ) describes the flux density under mean radial position, as Fig. 8. K i =1 1 I ∑ Bg (θi + θ0 )(r1i 2 − r2 i 2 ) 2 i =1 1 K − I ∑ Bg (θ j + θ 0 )(r1 j 2 − r2 j 2 ) 2 j =1 ν N TAC (θ 0 ) = TA (θ 0 ) − TC (θ 0 ) = TA (θ0 ) − TA (θ 0 + C ⊕ S dT = Bg (θ )rIdr 1 Bg (θ )rdr = IBg (θ )(r2 2 − r12 ) 2 (1) r2 1 e = ω ∫ Bg (θ )rdr = ω Bg (θ )(r2 2 − r12 ) r1 2 (2) K π 3( K + 1) 1 IBg (θi )(r1i 2 − r2i 2 ) 2 1 IBg (θ j )(r1 j 2 − r2 j 2 ) 2 1 = ω ∑ Bg (θi + θ 0 )(r1i 2 − r2i 2 ) 2 i =1 1 K − ω ∑ Bg (θ j + θ 0 )(r1 j 2 − r2 j 2 ) 2 j =1 eAC (θ 0 ) = eA (θ 0 ) − eC (θ0 ) (3) = eA (θ 0 ) − eA (θ0 + 2π ) 3 (10) (11) Back EMF of winding A-C is (4) E AC (θ0 ) = aeAC (θ 0 ) P (12) C. Back EMF Prediction Here, back EMF is obtained for the case where the rotor speed is 100 rpm for the axial position at 0.6mm with parameters listed in table 1. The result is shown in Fig. 9. The theoretical results showed good agreement with those obtained by 3D-FE analysis by Ansoft Maxwell 3D, as in Fig. 12. (5) Torque induced by winding A is 978-1-4673-2639-1/12/$31.00 ©2012 IEEE i =1 K Within π/3 of second half winding, the magnetic torque induced by j-th conductor is Tj = K i =1 In a three-phase balanced winding, the number of turns in three windings is equal with the electrical angle between the adjacent phases such as A & B is π/3. Same electrical angle is also between the phases, B & C. So the electrical angle of the half of winding A is π/3, within π/3 of first half winding, the torque induced by the k-th coil wire located in the radial direction is Ti = (9) e(θ 0 ) = ∑ ei (θ 0 ) − ∑ e j (θ0 ) Using left lead as a reference point, the phase difference between two conductors is Δθ = (8) B. Back EMF Because eA , eC have differ angle of 2π/3, the induced EMF can also be defined in terms of the rate at which magnetic lines of flux are cut by the wire, so the back EMF of the disk motor have the same form The whole torque induced by one conductor under theta is r1 (7) Where a is the layer number, and P is pole pairs number. Figure 8. Description of the air gap flux density T = I∫ 2π ) 3 TW _ AC = aTAC (θ 0 ) P ⊙ The motor mechanical velocity is ω. The torque conducted by conductor with longth dr under (r, θ) position is r2 (6) When θ0 vary from 0 to 2π, the Back EMF of winding A is derived. θ B i =1 K = Bg A K TA (θ 0 ) = ∑ Ti (θ 0 ) − ∑ T j (θ0 ) 546 Aug,23-25,.2012 2012 International Conference on Optoelectronics and Microelectronics (ICOM) 0.15 Back EMF(Volt) 0.1 X: 4.608 Y: 0.1104 0.05 0 -0.05 -0.1 -0.15 0 1 2 3 4 5 Electrical Angal (Rad) 6 Figure 12. EMF calculated by 3D FEM Figure 9. EMF calculated by this method TABLE I. DESIGN PARAMETER Wire number 1 2 3 4 5 6 Inner radius(mm) Outer radius(mm) 15 24.5 16 23.5 17 22.5 17 21.2 16 22.5 15 23.5 IV. EXPERIMENT AND RESULTS A. Maxwell Result of back EMF From the design outlined in the previous section, a prototype is constructed as shown in Fig. 10. This Rotor is 7 mm high with an exterior diameter of 55 mm. The motor utilizes the two-layer PCB winding. Flywheel system uses three-phase disk-type brushless DC motor as a driving device. The planar structure of the motor greatly reduces the axial dimensions of system, thus making the structure of the motor more compact. The stator of DC motor adopts the slotless armature structure with no core to eliminate the problems of pulsation, hysteretic losses and eddy current losses caused by the cogging. This will greatly improve the efficiency of the motor. The manufacture of the stator of the motor chooses the convenient PCB processing. The positive and negative layers of the stator have 36 coils to form three-phase Y-connected by the nodes. Current shift of the three-phase DC motor is achieved by adding three Hall elements on the side of the stator coil. The Hall elements can also be used to measure the speed and precise location of the rotor. The experiment result is shown in Fig. 11 with condition of rotor speed 100 rpm and the axial position at 0.6mm. Back EMF comparison between proposed method and experiment measurement is shown in Fig. 13. Figure 10. Prototyped results. (a) PCB winding. (b) Rotor. Figure 11. EMF measured under speed of 33Hz 978-1-4673-2639-1/12/$31.00 ©2012 IEEE 547 Aug,23-25,.2012 2012 International Conference on Optoelectronics and Microelectronics (ICOM) Measurement Calculate 4.0 3.5 Back EMF(Volt) 3.0 2.5 2.0 1.5 1.0 0.5 0.0 0 200 400 600 800 1000 1200 1400 speed (rad/s) Figure 13. Back EMF comparison of measurement and calculation V. CONCLUSION This paper has presented a design procedure for an axialflux flywheel motor which has promising applications in nanosatellite. The design aims to eliminate much of the structure of a conventional radial-flux machine so that its thickness is only 25 mm and exterior diameter is 60 mm with vacuum box. A PCB winding is applied to reduce the structure of stator. A prototype motor is fabricated and the performance tested. Measured results from the prototype motor confirm the validation of the proposed design method. The predictions are shown to be in good agreement with 3-D FE results. ACKNOWLEDGMENT Thanks to Professor Yihui Wu for her helpful discussions on motor design. This work was supported in part by National Natural Science Foundation (No.6131190103). REFERENCES [1] [2] [3] [4] [5] [6] D. G. Dorrell, A. M. Knight, and M. Popescu, “Performance Improvement in High-Performance Brushless Rare-Earth Magnet Motors for Hybrid Vehicles by Use of High Flux-Density Steel,” IEEE Trans.Magn., vol. 47, no. 10, pp. 3016–3019, 2011. S. L. Ho, S. Niu, and W. N. Fu, “Design and Analysis of a Novel AxialFlux Electric Machine,” IEEE Trans.Magn., vol. 47, no. 10, pp.4368– 4371, 2011. J. Choi, S. Lee, K. Ko, and S. Jang, “Improved Analytical Model for Electromagnetic Analysis of Axial Flux Machines With Double-Sided Permanent Magnet Rotor,” IEEE Trans.Magn., vol. 47, no. 10, pp.2760– 2763, 2011. P. Zheng, J. Zhao, R. Liu, C. Tong, and Q. Wu, “Magnetic Characteristics Investigation of an Axial-Axial Flux CompoundStructure PMSM Used for HEVs. ,” IEEE Trans.Magn., vol. 46, no. 6, pp.2191–2194, 2010. J. H. Choi, J. H. Kim, D. H. Kim, and Y. S. Baek, “Design and Parametric Analysis of Axial Flux PM Motors With Minimized Cogging Torque. ,” IEEE Trans.Magn., vol. 45, no. 6, pp.2855–2858, 2009. J. H. Choi and Y. S. Baek, “Theoretical Analysis and Its Applications of a PM Synchronous Motor With Minimized Cogging Force,” IEEE Trans.Magn., vol. 45, no.10, pp. 4692–4695, 2009. 978-1-4673-2639-1/12/$31.00 ©2012 IEEE View publication stats 548 Aug,23-25,.2012