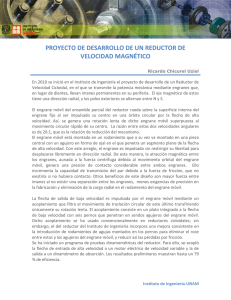
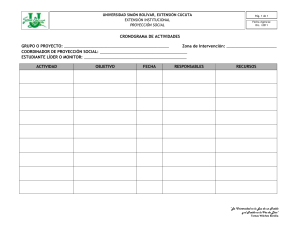
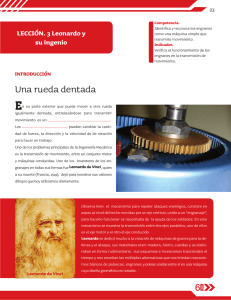
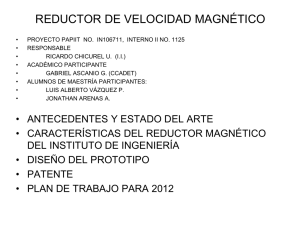
Departamento de Procesos y Sistemas MODELAJE DE SISTEMAS MECÁNICOS ROTACIONALES Prof. Alexander Hoyo Junio 2010 Caracas, Venezuela Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 1/13 ÍNDICE Pág. Sistema mecánico rotacional 3 Servomotor de CD controlado por armadura 4 Engranes 7 Servomotor de CD con carga acoplada mediante engranes 10 Referencias 13 Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 2/13 SISTEMA MECÁNICO ROTACIONAL El sistema consiste en una carga inercial y un amortiguador de fricción viscosa. J T ω b La segunda ley de Newton establece que: Jα = ∑ T J Momento de Inercia de la carga [kg-m2] α Aceleración angular de la carga [rad/s2] T Par aplicado al sistema [N-m] Entonces: • J ω = -bω + T b Coeficiente de fricción viscosa [N-m/rad/s] ω Velocidad angular [rad/s] La función de transferencia resulta en: Ω( s ) 1 = T (s) Js + b Donde: Ω(s) y T (s) son las transformadas de Laplace de la salida (velocidad angular ω ) y de la entrada (par T aplicado). Ejercicio: Obtener la función de transferencia Θ( s ) donde Θ(s) es el desplazamiento angular en T ( s) radianes de la carga. Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 3/13 SERVOMOTOR DE CD CONTROLADO POR ARMADURA La Ra θ ea eb ia J T If b El par electromagnético del motor es: ZNP T = Φ P ia aπ En el devanado de la armadura: Z Número de bobinas N Número de vueltas por bobinas a Número de trayectorias de corrientes paralelas P Número de polos Φ P Flujo por polo ia Corriente de armadura Simplificando se puede decir que: ∆ ZNP K1 = aπ El flujo Φ P puede expresarse como: ΦP = Nf Rf ∆ if =K f if ∆ Kf = Nf Rf i f Corriente de campo N f Número de vueltas R f Reluctancia de la trayectoria del flujo Φ P Entonces el par electromagnético en el motor se puede expresar como: T = K 1 ⋅ K f ⋅ i f ⋅ ia Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 4/13 En un motor de CD con excitación independiente, la corriente de campo i f es constante I f y el par se puede expresar como: T = K ⋅ ia (1) K = K1 ⋅ K f ⋅ I f Constante del par motriz De la ec. (1) se observa que si el signo de la corriente de armadura se invierte, el signo del par T también se invierte, lo que indica un cambio en el sentido de rotación del eje del motor. Del circuito de armadura se tiene: La dia + Ra ia + eb = ea dt (2) La Inductancia de la armadura [H] Ra Resistencia de la armadura [ Ω ] ea Voltaje aplicado a la armadura [V] eb Fuerza contra-electromotriz [V] Cuando la armadura está girando, se induce en ella un voltaje proporcional al producto del flujo por la velocidad angular. Como el flujo es constante, el voltaje inducido es directamente proporcional a la velocidad angular. eb = K b dθ dt (3) θ Desplazamiento angular del eje del motor [rad] Aplicando la segunda ley de Newton se tiene que: d 2θ dθ J 2 =T −b dt dt (4) J Momento de inercia equivalente del motor y la carga con referencia al eje del motor [kg-m2] b Coeficiente de fricción viscosa del motor y la carga referido al eje del motor [N-m/rad/s] Reescribiendo la ec. (4) e introduciendo la ec. (1) se tiene: d 2θ dθ J 2 +b = T = K ⋅ ia dt dt (5) Tomando las transformadas de Laplace de las ec. (2), (3) y (5) se tiene: La sI a (s ) + Ra I a ( s ) + K b sΘ( s ) = Ea ( s ) (6) Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 5/13 (7) Js 2 Θ(s ) + bsΘ( s ) = KI a ( s ) Sustituyendo I a ( s ) de ec. (7) en la ec. (6) se tiene: (La s + Ra )I a ( s) + K b sΘ(s) = Ea (s) (La s + Ra ) Js + bs Θ(s) + K b sΘ( s) = Ea ( s) 2 K Js + bs + K b s Θ( s ) = Ea ( s ) (La s + Ra ) K 2 (La s + Ra ) Js + bs + KK b s Θ(s) = KE a ( s) 2 [ ⇒ ( ) ] Θ( s ) K = 2 Ea (s ) s[ La Js + ( La b + Ra J )s + Ra b + KK b ] Ejercicio: Obtener la función de transferencia Ω( s ) Ea ( s) donde Ω(s ) es la transformada de Laplace de la velocidad angular del eje del motor. ω= dθ Velocidad angular del eje del motor. dt Respuesta: Ω( s ) K = Ea ( s ) ( La s + Ra )( Js + b) + KK b Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 6/13 ENGRANES Los engranes se utilizan para reducir o aumentar la velocidad y/o pares u obtener la mejor transferencia de potencia al acoplar alguna carga a un elemento motriz a través de un o varios engranes. Suponiendo que los ejes poseen rigidez infinita y que la cantidad de dientes en cada engrane es proporcional al radio de los mismos. N1 J 1 , b1 Eje 1 Engrane 1 Eje 2 Par de entrada del motor Tm θ1 J 2 , b2 N3 Engrane 3 Eje 3 θ2 Engrane 2 J 3 , b3 N2 θ3 Engrane 4 N4 Par de carga TL La cantidad de dientes de cada engrane es N1 , N 2 , N 3 y N 4 respectivamente. Los θ1 , θ 2 y θ 3 representan el desplazamiento angular de cada eje. θ 2 N 2 = θ1 N1 ⇒ θ 2 N1 = θ1 N 2 θ3 N 4 = θ 2 N3 ⇒ θ3 N3 = θ2 N4 Los momentos de inercia y los coeficientes de fricción viscosa de cada componente del sistema de engranes se denominan J 1 , b1 ; J 2 , b2 y J 3 , b3 respectivamente. J 3 , b3 incluyen el momento de inercia y el coeficiente de fricción viscosa de la carga. Para el eje 1 se tiene la siguiente ecuación: •• • J 1 θ1 = Tm − b1 θ1 − T1 (8) Tm Par desarrollado por el motor T1 Par de la carga en el engrane 1 debido al resto de los engranes Para el eje 2 se tiene la siguiente ecuación: Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 7/13 •• • J 2 θ 2 = T2 − b2 θ 2 − T3 (9) T2 Par transmitido al engrane 2 T3 Par de la carga en el engrane 3 debido al resto de los engranes Como el trabajo realizado por el engrane 1 es igual al trabajo realizado por el engrane 2 se tiene: T1θ1 = T2θ 2 T2 = T1 θ1 N = T1 2 θ2 N1 Si N1 N 2 < 1 la relación de engranes reduce la velocidad, al tiempo que amplifica el par. Para el eje 3 se tiene la siguiente ecuación: •• • J 3 θ 3 = T4 − b3 θ 3 − TL (10) T4 Par transmitido al engrane 4 TL Par de la carga Como el trabajo realizado por el engrane 3 es igual al trabajo realizado por el engrane 4 se tiene: T3θ 2 = T4θ 3 T4 = T3 θ2 N = T3 4 θ3 N3 Reescribiendo la ec. (10) se tiene: •• • (11) J 3 θ 3 + b3 θ 3 + TL = T4 Reescribiendo la ec. (9) sabiendo que T4 = T3 •• • J 2 θ 2 + b2 θ 2 + T4 N4 resulta en: N3 N3 = T2 N4 (12) Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 8/13 Sustituyendo T4 de la ec. (11) en la ec. (12): •• • •• • N J 2 θ 2 + b2 θ 2 + 3 J 3 θ 3 + b3 θ 3 + TL = T2 N4 N2 resulta en: N1 Reescribiendo la ec. (8) sabiendo que T2 = T1 •• • J 1 θ1 + b1 θ1 + T2 (13) N1 = Tm N2 (14) Sustituyendo T2 de la ec. (13) en la ec. (14): •• • J 1 θ1 + b1 θ1 + • • N1 •• N 3 •• θ θ θ θ J + b + J + b 3 3 3 3 + TL = Tm 2 2 2 2 N2 N4 Ó •• • J 1 θ1 + b1 θ1 + • N1 •• + N1 N 3 J θ•• + b θ• + T = T J θ + b θ 2 2 2 2 3 3 3 3 L m N2 N2 N4 Además, como (15) N θ θ 2 N1 = y 3 = 3 , entonces: θ1 N 2 θ 2 N 4 θ3 = θ 2 N3 N N = θ1 3 1 N4 N4 N2 La ec. (15) se puede reescribir como en función de θ1 : 2 2 2 2 2 2 N1 N 1 N 3 •• N1 N1 N 3 • N1 N 3 J 2 + J 3 θ1 + b1 + b2 + b3 θ1 + J 1 + TL = Tm N2 N4 N2 N 2 N 4 N2 N 2 N 4 (16) El momento de inercia y el coeficiente de fricción viscosa del sistema de engranes referido al eje 1 son equivalentes a las siguientes expresiones: 2 2 2 2 2 2 N N N J 1eq = J 1 + 1 J 2 + 1 3 J 3 N2 N2 N4 N N N b1eq = b1 + 1 b2 + 1 3 b3 N2 N2 N4 Por lo que se puede escribir la ec. (16) de la siguiente forma, asumiendo n = •• • J 1eq θ1 + b1eq θ1 + nTL = Tm N1 N 3 N2 N4 (17) Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 9/13 SERVOMOTOR DC CON CARGA ACOPLADA MEDIANTE ENGRANES Considere el sistema, un servomotor de cd controlado por armadura que excita una carga consistente en un momento de inercia J L . El par desarrollado por el motor es Tm . El desplazamiento angular del rotor del motor y el elemento de carga son θ m y θ L respectivamente. Los coeficientes de fricción viscosa de del eje del motor y el de carga son bm y bL respectivamente. La relación de engranes es L θL =n θm R θm ei N1 Jm eb Tm θL ia JL If N2 Para el eje del motor se tiene la siguiente ecuación: •• • (18) J m θ m = Tm − bm θ m − T1 Donde el T1 es el par de la carga en el engrane 1. Para el eje de la carga la ecuación resulta en: •• • J L θ L = TL − bL θ L •• • (19) J L θ L + bL θ L = TL Como el trabajo realizado en el engrane 1 es igual en el engrane 2 se tiene que: T1θ m = TLθ L ⇒ T1 = TL θL θm ⇒ T1 = TL N1 = nTL N2 La ec. (18) se puede expresar como: Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 10/13 •• • J m θ m + bm θ m + nTL = Tm Sustituyendo la ec. (19) en la ecuación anterior se tiene: •• • • •• J m θ m + bm θ m + n J L θ L + bL θ L = Tm Sabiendo que θ L = nθ m la ecuación anterior se reescribe como sigue: •• • •• • J m θ m + bm θ m + n nJ L θ m + nbL θ m = Tm •• • (J + n J )θ + (b + n b )θ = T 2 m L 2 m m L m (20) m Del circuito de armadura se extrae la siguiente ecuación: L dia + Ria + eb = ei dt (21) La Fuerza contra-electromotriz resulta en: • (22) eb = K b θ m Aplicando transformada de Laplace a las ec. (21) y (22), se tiene: (23) (Ls + R )I a ( s) + K b sΘ m (s) = Ei ( s) Como la corriente del campo es constante se puede expresar el par del motor como: Tm = K ⋅ ia De esta forma de la ec. (20) se extrae I a : (J + n J )s Θ (s ) + (b + n b )sΘ (s) = I (s) 2 m 2 L 2 m m K L m a Esta expresión de I a se sustituye en la ec. (23) para hallar la función de transferencia del sistema: Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 11/13 (Ls + R ) (J m + n J L )s Θ m (s ) + (bm + n bL )sΘ m ( s) + K b sΘ m (s) = Ei ( s) 2 2 2 K [(Ls + R)[(J + n J )s + (b + n b )s ] + K K ]Θ (s) = K ⋅ E (s) 2 2 m L 2 m L b m Θ m ( s) K = 2 Ei ( s ) ( Ls + R)[( J m + n J L ) s 2 + (bm + n 2bL ) s ] + K b K i (24) Esta ecuación se puede reescribir como: Θ m ( s) K = 2 Ei ( s ) (Ls + R ) J eq s + beq s + K b K ( (25) ) Donde: J eq = J m + n 2 J L beq = bm + n 2bL Como θL = n , se tiene: θm Θ L ( s ) nΘ m ( s ) nK = = Ei ( s ) Ei ( s ) (Ls + R ) J eq s 2 + beq s + K b K ( ) Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 12/13 REFERENCIAS 1. Ogata, K. (1993). Ingeniería de Control Moderna. 2da. Edición. Prentice Hall. 2. Dorsey, J. (2005). Sistemas de control continuos y discretos. McGraw-Hill. Prof. Alexander Hoyo. Universidad Simon Bolívar. Departamento de Procesos y Sistemas. Pág. 13/13