TP Motores - UTN FRBA
Anuncio

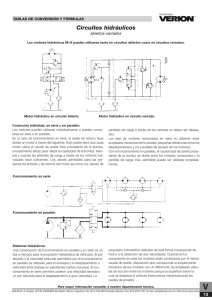
Informática II MESA XY PROFESORES: ING. MARCELO GIURA ING. MARCELO TRUJILLO ALUMNOS: MARTINI, ADRIAN PETRE, MARTIN ~2005~ Descripción: Consiste en una mesa XY la cual esta formada por dos correas impulsadas por motores paso a paso que permiten los respectivos desplazamientos. El mecanismo de poleas esta unido a un carretel principal que se desplaza por dos rieles metálicos. Estos motores están conectados mediante una etapa de potencia al puerto paralelo. El movimiento es controlado por el incremento de una variable global (una para cada eje), restringiendo este con unos fines de carrera dentro del software (limitando a una cantidad máxima de pasos). El programa se divide en funciones, en cuyo menú principal, manejado por un switch case; se pueden seleccionar seleccionar las diferentes opciones del mismo, que son: * La modificación de la velocidad de movimiento (se modifica la interrupción). * Ingreso de coordenadas cartesianas. * Visualización de la base de datos. * La salida del programa. Motores paso a paso. Los motores paso a paso son dispositivos que convierten pulsos eléctricos en movimientos discretos de rotación mecanica (por pasos) de gran precision. El control de rotación de los PAP se basa en una secuencia determinada la cual alimenta a cada una de las bobinas para pruducir su angulo de paso; la repetición sincronica de la logica secuencial de pulsos aumentara el numero de pasos produciendo un movimiento uniforme. Para regular la velocidad del motor debe ser gradualmente acelerado y para pararlo debe ser gradualmente desacelerado, teniendo en cuenta la inercia del sistema. Existen PAP unipolares y bipolares del cual se diferencian en al cabtidad de bobinas y de la logica secuencial. Los unipolares con los que trabajamos tiene 4 bobinas organizadas en dos pares, con cada par conectadas en serie. El control de cada bobina esta dado por señales cuadradas desfasadas controladas por el puerto paralelo (LPT2 378h), mediante las 8 lineas de datos. La base de tiempo de la interrupcion del puerto fue de 15mili segundo por señal proveniente del contador 2 del timer (8254) . LOGICA SECUENCIAL : El TIP 122 es la interfaz de potencia entre el puerto y los PAP. El circuito interno del TIP 122 contiene 2 transistores bibolares NPN en configuración Darlington para un mayor manejo en la ganancia de corriente y 2 resistencias de polarizacion. Incluye ademas un diodo de protección para la descarga inductiva de cada bobinado. Descripción interna: DIAGRAMA DE BLOQUE : INTERFAZ DE POTENCIA: Por cada pin del puerto paralelo sale una señal digital rectangular de 5 v de amplitud que se conectan a cada una de las 8 bases de los tip 122 mediante una R de base de 330 ohm (4 para cada motor), que en realidad funcionan como llaves electrónicas que al polarizarse permiten circular una corriente mayor que la que provee puerto para poder maneja los respectivos motores. Finalmente los motores son alimentados por una corriente proveniente de una fuente externa. Los pines A, B, C y D que se muestran en la figura, corresponden a los pines de salida del registro de datos que esta en la dirección 0x0378. (estos pines son para un solo motor, para el otro son los otros 4).