CONVERTIDORES DC
Anuncio

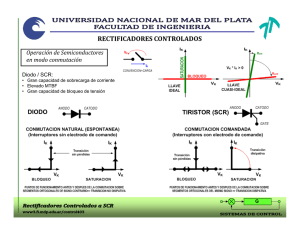
CONVERTIDORES DC - DC ELECTRONICA TERMODINAMICA FISICA DE SEMICONDUCTORES ELECTROMAGNETISMO PROCESAMIENTO DE POTENCIA TEORIA DE CONTROL SIMULACION MAQUINAS ELECTRICAS CONFIABILIDAD PROCESAMIENTO DE SEÑAL G CONVERTIDORES DC - DC OBJETIVOS DEL MÓDULO: INTRODUCCIÓN AL ESTUDIO DE TÉCNICAS DE CONVERSIÓN ELECTRÓNICA DE POTENCIA ESTUDIO DE COMPONENTES PASIVOS Y ACTIVOS EN APLICACIONES DE POTENCIA ANÁLISIS Y CÁLCULO DE ESTRUCTURAS BÁSICAS DE CONVERSIÓN DC/DC MODELACIÓN Y CONTROL DE SISTEMAS DE ESTRUCTURA VARIABLE (NO-L.T.I.) ORGANIZACIÓN: (5 SESIONES) INTRODUCCIÓN: Paradigma del procesamiento de energía (eficiencia/densidad volumétrica energía/ costo/stress/controlabilidad/frecuencia conmutación)- Elementos circuitales- Estimación de pérdidasTOPOLOGÍAS BÁSICAS: Forward / Flyback / Boost- Inclusión de transformador de aislación- Cálculo de elementos de filtro basados en prestaciones. Práctica demostrativa. MODELACIÓN DE SISTEMAS DE ESTRUCTURA VARIABLE: El método de promediación de estados. SIMULACIÓN CIRCUITAL: Verificación funcional de regímenes de operación. (LTSpice / NL5) PROYECTO: Diseño y compensación de convertidor DC-DC tipo forward. Discusión. G INTRODUCION CASO LINEAL: REGULADOR DISIPATIVO + CONTROL: TENSION DE ENTRADA VARIABLE. REGULADOR? POTENCIA DE SALIDA= 240W – POTENCIA DE ENTRADA= ? EFICIENCIA ? FACTOR DE FORMA CORRIENTE DEL RECTIFICADOR? RED ELÉCTRICA? DIODOS INTERFERENCIA? DISTORSIÓN DE RED? FACTOR DE POTENCIA? DISIPADOR? COSTO? VOLUMEN? POTENCIA DE ENTRADA ENFOQUE GENERAL: FUENTE DE ENTRADA DC (CORRIENTE O TENSIÓN) CARGA DE SALIDA DC (CORRIENTE O TENSIÓN) EFICIENCIA: L, C, TRANSFORMADORES, SWITCHES ! SISTEMA DE CONTROL ORIENTADO AL PROCESADOR DE POTENCIA VOLUMEN, COSTO, INTERFERENCIA, DINÁMICA? POTENCIA DE SALIDA PROCESADOR DE POTENCIA CARGA VI II VO IO VARIABLES DE CONTROL CONTROLADOR FEEDFORWARD REALIMENTACION REFERENCIA G INTRODUCION PROCESADOR NO LINEAL: REGULADOR CONMUTADO + CONTROL FRECUENCIA DE CONMUTACIÓN FIJA Fs CONTROL DEL CICLO DE TRABAJO D(t), 0<D(t)<1 INTERES EN LAS VARIABLES PROMEDIO SOBRE T=1/Fs SISTEMA CON ESTRUCTURA VARIABLE DOS ENTRADAS, NO APLICA LINEALIDAD HIPÓTESIS CCM: IL>0 REDUCIDO RIPPLE IMPLEMENTACIÓN CIRCUITAL PARCIAL G CONVERTIDORES DC-DC EN ESTADO ESTACIONARIO CASO 1: FORWARD (BUCK) CICLO DE TRABAJO: 0 HIPÓTESIS CCM: IL>0 REDUCIDO RIPPLE: ∆Vo<<Vo UN SWITCH ACTIVO (FORZADO) UN SWITCH PASIVO (NATURAL) VA VCC + L IL + C ைே 1 ௌ CARGA V RAMP V CONT COMPARADOR PWM ESTADO ON: ܮ ݀݅ܮ ܦ. ܶܵ = ሺܸ ܥܥ− ܸܱ ሻ → ∆ܮܫ+ = . ሺܸ ܥܥ− ܸܱ ሻ (1) ݀ݐ ܮ ESTADO OFF: ESTADO ESTACIONARIO: ∆ା −ܮ ݀݅ܮ (1 − )ܦ. ܶܵ = ܸܱ → ∆ܮܫ− = . ܸܱ (2) ݀ݐ ܮ ∆ି VO RELACIÓN DE CONVERSIÓN: ை . PROPORCIONALIDAD=> LINEALIDAD ? G CONVERTIDORES DC-DC EN ESTADO ESTACIONARIO CASO 1: FORWARD (BUCK) LÍMITE DE CONDUCCIÓN CONTÍNUA (CCM / DCM) ESTADO ON: ݀݅ܮ ܦ. ܶܵ = ሺܸ ܥܥ− ܸܱ ሻ → ∆ܮܫ+ = . ሺܸ ܥܥ− ܸܱ ሻ (1) ݀ݐ ܮ IL + ܮ - IL OFF1 OFF2 ESTADO OFF1: −ܮ ݀݅ܮ (1 − )ܦ. ܶܵ = ܸܱ → ∆ܮܫ− = . ܸܱ (2) ݀ݐ ܮ ESTADO OFF2: RELACIÓN DE CONVERSIÓN: ை . , ை 2. . ை . . ௌ ை ∆ 2 G CONVERTIDORES DC-DC EN ESTADO ESTACIONARIO CASO 1: FORWARD (BUCK) VA VCC + L IL Ts + C TON CARGA Q t V RAMP V CONT IL + IL IL - IL IO CASO CONDUCCIÓN CRÍTICO (LÍMITE) t COMPARADOR PWM INDUCTOR CRÍTICO (MÍNIMO) ∆ 2. ை → CÁLCULO DE RIPPLE DE TENSIÓN EN CCM: ை 1 . ௌ 2. ை Ts TON ∆ ∆ ௌ 1 ை 1 . ௌଶ ∆ை . . 8. . 2 2 2 Q t IL VO Q IL IO Q ∆ை 1 → ை 8. . . ௌଶ 1 ∆ை 1 . ଶ 2 ை ௌ ଶ RIPPLE RELATIVO DE TENSIÓN t VC VO VO t RESPUESTA DEL FILTRO LC G CONVERTIDORES DC-DC EN ESTADO TRANSITORIO CASO 1: FORWARD (BUCK) VA VCC + L IL + C RESPUESTA TRANSITORIA EN LAZO ABIERTO A UN ESCALÓN DE CARGA ESCALÓN DE CARGA POSITIVO VO CARGA ைሺெூேሻ → ைሺெሻ V RAMP V CONT COMPARADOR PWM ொ . ெ ெூே ை ∆ை . ெ ெூே 2. ை ொ . ெ ெூே ை ∆ை . ெ ெூே 2. . ை El lazo de control fuerza D=1 durante el transitorio. ESCALÓN DE CARGA NEGATIVO El lazo de control fuerza D=0 durante el transitorio. ைሺெሻ → ைሺெூேሻ ଶ ଶ * Se asume pequeña perturbación G MODELIZACIÓN POR PROMEDIACIÓN DE ESTADOS SISTEMA DE ESTRUCTURA VARIABLE NO LINEAL VARIANTE EN EL TIEMPO SUPOSICIONES DE VALIDEZ: ESTACIONARIEDAD ESTRATEGIA DE CONTROL PWM (FREC. CONSTANTE) CONDUCCIÓN CONTÍNUA PEQUEÑA SEÑAL / PERTURBACIÓN SECUENCIALIDAD DE ESTADOS LINEALIDAD APLICABLE A/C ESTRUCTURA LIMITACIÓN DINÁMICA (INTERÉS EN PROMEDIOS) Variable binaria (n-aria en gral.) Define unívocamente estado topológico del circuito. 1 ௧ା்ೄ . ௌ ௧ OBJETIVO DEL ANÁLISIS: DESCRIPCIÓN DEL SISTEMA: . . ࡵ ࡻ . . . ࡵ ESTADO 1 ࡻ . . . ࡵ ࡻ . DECOMPOSICIÓN DE V.E. . . . . . . ESTADO 2 ࡷ ࡷ ࡷ PROMEDIACIÓN G