Matriz de Proyección
Anuncio

Matrices de Proyección
Departamento de Matemáticas, CSI/ITESM
14 de abril de 2008
Índice
12.1. Proyección ortogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.2. Proyección de un vector en Rm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.3. Matriz de Proyección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.1.
1
4
5
Proyección ortogonal
Teorema 12.1
Sea Y una matriz m × n y un espacio lineal V de dimensión r, ambos dentro de un espacio lineal
U . Entonces, existe una única matriz Z en V tal que (Y − Z) ⊥ V . Si r = 0 entonces Z = 0, y si
r > 0 entonces Z se puede expresar como
Z = c1 X 1 + . . . + c r X r ,
donde {X1 , . . . , Xr } forman una base ortonormal de V y ci = Y • Xi para i = 1, . . . , r. Además,
Z = Y si y sólo si Y ∈ V . La matriz Z se llamará la proyección ortogonal de Y sobre V .
Demostración
Si r = 0 entonces dim(V ) = 0, y por tanto V = {0}. Para Z = 0 se tiene (Y − Z) ⊥ V . Y es claramente la
única matriz en V que cumple esto.
P
Si r > 0 sea {X1 , . . . , Xr } una base ortonormal de V y definamos ci = Y•Xi para i = 1, . . . , r y Z = ri=1 ci Xi .
Claramente, Z ∈ V y
!
r
X
Y−
ci X i • X j = Y • X j − c j = 0
i=1
para cada j = 1, . . . , r. Y por tanto (Y − Z) ⊥ V .
Si X ∈ V y (Y − X) ⊥ V :
(X − Z) • (X − Z) = (X − Y + Y − Z) • (X − Z)
= −(Y − X) • (X − Z) + (Y − Z) • (X − Z)
= −0 + 0 = 0
Como X − Z ∈ V , (Y − Z) • (X − Z) = 0. Por tanto, X − Z = 0 y de allı́ que X = Z, haciendo que Z sea el
único vector en V que cumple (Y − Z) ⊥ V ⋄
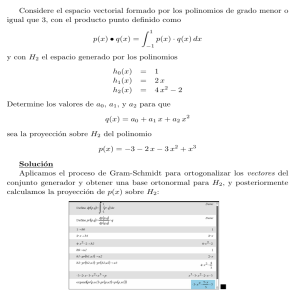
Ejercicio 1
Considere el espacio lineal formado por todas las soluciones al sistema homogéneo:
x+y+z−w = 0
x−y−z+w = 0
y el vector d =< 1, 3, 2, 1 >.
Usando el orden primero x, luego y, luego z, y por último w, encuentre una base para el
espacio solución.
Ortogonolice la base encontrada.
Usando la base encontrada, determine la proyección ortogonal de d sobre tal espacio.
Usando el orden primero y, luego w, luego y, y por último z, encuentre una base para el
espacio solución.
Ortogonolice la base nueva base.
Usando la nueva base encontrada, determine la proyección ortogonal de d sobre tal espacio.
Lema 12.2
Sean A una matriz m × n. Si X es invertible n × n entonces
C(A X) = C(A)
y en particular, rank (A X) = rank (A).
Demostración
Claramente C(A X) ⊆ C(A). Como
A = A (X X−1 ) = (A X)X−1
entonces, C(A) ⊆ C(A X). De estas dos contenciones tenemos la igualdad de los conjuntos
⋄
Lema 12.3
Para cualquier matriz A:
rank(A′ A) = rank(A′ ) = rank(A)
Demostración
Sea A una matriz m × n con rango r. Sea A = Q R la factorización QR de A. Por tanto, Q′ Q = In y R es
una matriz cuadrada triangular superior con rango r. Ası́
A′ A = (Q R)′ (Q R) = R′ Q′ QR = R′ R
Si r = n, entonces R es invertible y R′ también y por consiguiente también R′ R, indicando que A′ A = R′ R
tiene rango n el mismo rango que A y que A′ .
Si r < n, entonces
Z B
R=
0 0
2
con Z matriz r × r invertible. Ası́
′
RR=
Z′ Z Z′ B
B ′ Z B′ B
Haciendo operaciones elementales sobre esta matriz se puede reducir a:
I Z−1 B
0
0
Indicando que A′ A = R′ R tiene rango r
⋄
Ejercicio 2
Para las matrices
2 1
A1 = 1 2
0 1
2 1 −1
A2 =
1 2
1
2 3 0
A3 = 2 3 0
2 3 0
repita los cálculos presentes en la demostración del lema 12.3.
Lema 12.4
Para cualquier matriz A m × n y cualquier vector b en Rm el sistema de ecuaciones:
A′ A x = A′ b
es consistente.
Demostración
Del lema anterior se deduce que C(A′ A) = C(A). Como el vector A′ b está en C(A′ ), entonces también está en
C(A′ A). Por consiguiente, el sistema formulado es consistente ⋄
Ejercicio 3
Para las matrices
2 1
A1 = 1 2
0 1
2 3 0
A2 = 2 3 0
2 3 0
y vectores b1 =< 1, 0, 1 > y b2 =< 1, −1, 0 >, vea que los sistemas A x = b con inconsistentes
pero los sistemas A′ A x = A′ b son consistentes.
3
12.2.
Proyección de un vector en Rm
Teorema 12.5
Sea z la proyección de b sobre C(A), A m × n. Entonces,
z = Ax∗
para cuaquier solución x∗ al sistema
A′ Ax = A′ b
Demostración
Suponga que x∗ es la solución al sistema A′ Ax = A′ b. Por el lema anterior, estos sistemas siempre son consistentes. Por tanto, A′ (Ax∗ − b) = 0, es decir que b − Ax∗ es ortogonal C(A). Como Ax∗ está en C(A),
por el resultado anterior Ax∗ es la proyeccción ortogonal de b sobre C(A)⋄
Ejercicio 4
Para las matrices
2 1
A1 = 1 2
0 1
2 3 0
A2 = 2 3 0
2 3 0
y los vectores b1 =< 1, 0, 1 > y b2 =< 1, −1, 0 >, determine las proyecciones de cada b a los
espacios columnas de cada A y compruebe que da lo mismo que se obtiene resolviendo los sistemas
A′ A x = A′ b.
Si uno dispone de una inversa generalizada de A′ A entonces es simple el cálculo del vector proyección sobre un
espacio. El siguiente resultado indica cómo y es una consecuencia inmediante del anterior y de las propiedades
de la inversa generalizada:
Corolario 12.6
Sea z la proyección del b sobre C(A), entonces
−
z = A(A′ A) A′ b
Ejercicio 5
Para las matrices
2 1
A1 = 1 2
0 1
2 3 0
A2 = 2 3 0
2 3 0
4
y los vectores b1 =< 1, 0, 1 > y b2 =< 1, −1, 0 >, en cada caso determine una inversa generalizada
para A′ A y compruebe que la proyección de b sobre C(A) coinde con el resultado que da la fórmula
del colorario 12.6.
Ejercicio 6
Encuentre la proyección del vector < 1, 1, 1 > sobre el plano 2x + 3y − z = 0.
Sugerencia
De acuerdo al resultado anterior se debe encontrar una matriz A tal que C(A) sea el plano. Para
ello hay que encontrar los vectores que general tal plano: “Resolviendo” la ecuación del plano:
3
1
3
−2
− 2 y + 21 z
x
2
= y 1 +z 0
y =
y
z
0
1
z
Ası́ el plano es el espacio generado por los vectores:
3 1
−2
2
1 , 0
0
1
Tome
− 23
1
A=
0
1
2
0
1
Ahora aplique la fórmula del vector de proyección: A (A′ A)− A′ b.
12.3.
Matriz de Proyección
El corolario anterior motiva la siguiente definición:
Definición
Sea A una matriz cualquiera, la matriz PA se definirá como:
PA = A A T A
−
AT
(1)
se conoce como la matriz de proyección ortogonal sobre A.
Nuestra meta ahora es probar que esta matriz no depende de la elección de la inversa generalizada de AT A
Teorema 12.7
−
.
Sean matrices X m × n, Y q × n, y X m × q. Si R(Y) ⊆ R(X) y C(Z) ⊆ C(X), entonces la matriz
YX− Z es independiente de la elección de X− .
Demostración
Suponga que R(Y) ⊆ R(X) y C(Z) ⊆ C(X) entonces existen matrices L y R tales que Y = LX y Z = XR.
Ası́:
YX− Z = (RX)X− (XR) = R(XX− X)R = LXR
el segundo miembro no depende de X−
⋄
Teorema 12.8
5
Sea A una matriz cualquiera, entonces la matriz proyección de A es independiente de la matriz
(A′ A)− .
Demostración
Por lema previo,
rank A′ A = rank(A′ ) = rank(A)
En particular, C(A′ ) ⊆ C(A′ A) y R(A) ⊆ R(A′ A). Por tanto, se cumplen las condiciones del teorema
anterior para X = A′ A, Y = A y Z = A′ : Por tanto,
−
Y X − Z = A A′ A A′
es independiente de (A′ A)−
⋄
Ejercicio 7
Para las matrices
2 1 3
A1 = 1 2 3
0 1 1
2 3 0
A2 = 2 3 0
2 3 0
determine dos matrices determine dos matrices inversas generalizadas de A′ A y vea que las matrices
de proyección arrojan el mismo resultado. En la determinación de las inversas generalizadas, utilice
la inversa de Moore-Penrose y otra obtenida del algoritmo visto en clase.
6