I. Resolución ´numérica S.E.L.
Anuncio

ESCUELA SUPERIOR DE NÁUTICA Y MÁQUINAS NAVALES / NAUTIKAKO
ETA ITSASONTZI MAKINETAKO GOI ESKOLA TEKNIKOA
FUNDAMENTOS MATEMÁTICOS
H – Integración Numérica
Objetivo:
El alumno habrá de adquirir conocimiento de diversos métodos de integración de
funciones. Pero además deberá tratar los principales métodos numéricos que se utilizan
para el cálculo aproximado de integrales definidas. Independientemente de que en la
práctica se utilicen medios informáticos para obtener el resultado de estas integrales.
Introducción:
En la mayoría de los cálculos de Ingeniería no es necesario obtener el resultado exacto
de las integrales definidas, es suficiente una buena aproximación de ellas. Esto se puede
conseguir por medio de la suma de los productos de los valores que toma la función a
integrar en ciertos puntos predeterminados, y de unos coeficientes.
Hay dos clases de métodos que deben distinguirse: I. Los métodos de tipo
interpolatorio, que nos conducirán a las Fórmulas de Newton-Cotes; II. Los métodos
basados en la cuadratura gaussiana.
H1. Métodos de tipo interpolatorio.
Sea una función f(x), que para simplificar la consideraremos continua en el intervalo
[a,b], la integral definida
b
f ( x) dx
a
representa el área comprendida entre la curva y = f(x) y el eje OX, con su respectivo
signo (positivo, para las regiones en las que la curva se halle por encima de OX, y
negativo, para las regiones en las que la curva se halle por debajo de OX).
1
Apoyándose en esta definición, la aproximación numérica de una integral definida es
una tarea muy simple.
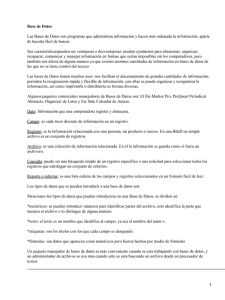
En una primera aproximación, podemos tomar un punto intermedio c en el interior del
intervalo [a, b], tal como se aprecia en la figura:
Entonces el valor de la integral podría aproximarse a la suma de las áreas de los dos
rectángulos:
b
f ( x) dx f (a) c a f (b) b c
a
Es una aproximación muy burda, sin embargo la importancia está en la estructura de la
fórmula de aproximación. Pues bien, una forma más general, llamada fórmula general
de aproximación numérica, obtenida al tomar no uno sino varios puntos intermedios del
intervalo [a, b], es la siguiente:
b
a
n
f ( x ) dx ai . f ( xi ) E ( f ab )
{1}
i 0
Siendo x0 = a, xn = b, los dos extremos, y siendo ai la distancia entre el i-ésimo punto
intermedio y el anterior. En cuanto a E(fab) representa el error cometido en esta
aproximación, que habrá que intentar que sea el menor posible.
Teniendo en cuenta que la función f(x) puede aproximarse por medio de un polinomio
interpolatorio p(x) con un error de ε(x):
f(x) = p(x) + ε(x)
En concreto, si utilizamos el polinomio de interpolación de Lagrange:
n
p( x) f ( xi ). Li ( x)
i 0
n
con Li ( x)
j 0
j i
x xj
xi x j
Siendo Li(x) el multiplicador i-ésimo del polinomio de Lagrange, entonces podremos
expresar la integral definida de la siguiente manera:
2
b
b
b
f ( x) dx p( x) dx ( x) dx
a
a
a
b
b
n
f ( xi ). Li ( x) dx ( x)dx
a i 0
n
a
b
b
f ( xi ) Li ( x ) dx ( x)dx
i 0
a
a
Que si lo comparamos con la fórmula general de aproximación {1}, llegamos a la
conclusión siguiente:
n
b
f
(
x
)
dx
ai . f ( xi ) E ( f ab )
i0
a
b
b
a L ( x)dx ; E ( f ) ( x )dx
ab
a
i i
a
De donde se obtienen las fórmulas de integración numérica de tipo interpolatorio.
Estas fórmulas dependen del número de puntos del soporte de integración, por ejemplo:
A) Soporte de integración unitario.
En caso de tomar un solo punto, {x0}, como soporte de integración, el polinomio de
interpolación es de grado 0, o sea:
p(x) = f(x0)
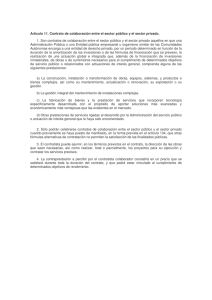
Como caso especial, si tomamos como único punto del soporte al punto medio del
intervalo x0 = (a + b)/2, obtenemos la llamada fórmula del punto medio:
b
f ( x) dx f (a b) / 2 .(b a)
a
Que gráficamente equivale a:
3
B) Soporte de integración binario.
En caso de tomar dos puntos, {x0, x1}, como soporte de integración, el polinomio de
interpolación vendrá expresado por:
p( x) f ( x0 ) f x0 , x1 .( x x0 )
(Hemos expresado el polinomio de Newton para mayor claridad). Entonces la fórmula
de integración queda:
b
a
b
b
f ( x )dx f ( x0 ) dx f x0 , x1 .( x x0 ) dx E ( f ab )
a
a
(b x0 ) 2 (a x0 )2
f ( x0 ) (b a ) f x0 , x1
E ( f ab )
2
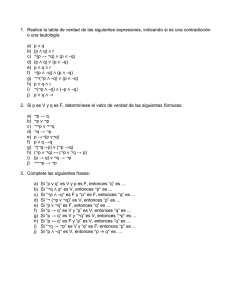
Como caso particular, podemos tomar los dos puntos coincidentes con los extremos
del soporte, es decir {x0= a, x1=b}, entonces tenemos la fórmula:
b
1
f ( x)dx 2 f (b) f (a) .(b a)
a
Conocida como la fórmula del trapecio, cuya interpretación gráfica se ve en la figura de
abajo.
4
H2. Fórmulas de Newton-Cotes
En las fórmulas de tipo interpolatorio, si tomamos los puntos xi igualmente espaciados a
lo largo del soporte [a, b], obtenemos las llamadas fórmulas de Newton-Cotes.
Es decir, dividimos el segmento [a, b] en n partes iguales, cada una con una longitud
de h = (b – a)/n, entonces los puntos se encontrarán en xi = a + i.h .
Aquí hay que hacer una distinción entre:
* Fórmulas cerradas de Newton-Cotes
* Fórmulas abiertas de Newton-Cotes
Fórmulas cerradas de Newton-Cotes: En ellas se incluye entre los puntos xi los
dos puntos extremos a y b. De tal modo que el soporte de puntos queda:
ba
S xi a i.h , h
, i 0,1, 2,..., n
n
Por ejemplo, para un soporte de 3 puntos, tendríamos:
x0 a, x1
a b
, x2 b
2
El alumno puede comprobar por sí mismo (integrando el polinomio
interpolatorio) que en este caso la fórmula de Newton-Cotes queda de la forma:
b
f ( x) dx
a
ba
ab
f (a ) 4 f
f (b)
6
2
Que es la denominada fórmula de Simpson.
Fórmulas abiertas de Newton-Cotes: En ellas se excluyen los puntos extremos a
y b del soporte de puntos xi. De tal modo que éste queda:
ba
S xi a i.h , h
, i 1, 2,..., n 1
n
Por ejemplo, para un soporte de 2 puntos, tendríamos:
x1 a
ba
ba
, x2 a 2
3
3
El alumno puede comprobar por sí mismo (integrando el polinomio
interpolatorio) que en este caso la fórmula de Newton-Cotes queda de la forma:
5
b
f ( x) dx
a
ba
ba
f (a
)
2
3
ba
f a 2
3
Grado de precisión:
Las fórmulas de Newton-Cotes reobtienen al integrar los polinomios interpoladores
de Lagrange de grado n, cuya función de error contiene la derivada (n+1) de la
función integrando. Por consiguiente, estas fórmulas tienen un grado de precisión
de, al menos, n. Por ejemplo, el error para la fórmula de Simpson es:
E ( f ab )
k (b a )5
180 m 4
siendo m el número de puntos del soporte (m=3), y k es la cota superior de los
valores f iv)(x) para los xi en el intervalo (a, b).
Inconveniente:
El inconveniente de las fórmulas de Newton-Cotes es que necesitamos conocer el
valor que toma la función integrando, f(x), en cada uno de los puntos xi del soporte.
Esto está muy bien si la función f(x) es bien conocida, pero no siempre es este el
caso. Además, dependiendo de la forma de f(x), para ciertas funciones con picos
pronunciados, etc, tomar los xi igualmente espaciados puede no ser la mejor
elección.
H3. Fórmulas de cuadratura gaussiana.
Las fórmulas de cuadratura gaussiana no toman los puntos xi del soporte
igualmente espaciados, sino que se escogen de tal manera que el error E sea el
mínimo posible, y por lo general los puntos no están igualmente espaciados.
Para establecerlas se parte de la ya conocida fórmula {1} de aproximación
numérica:
b
n
f ( x ) dx ai . f ( xi ) E ( f ab )
i 0
a
b
b
Siendo: ai Li ( x)dx ; E ( f ab ) ( x )dx
a
a
Y ahora consideramos los puntos xi escogidos de tal forma que E(fab) sea mínimo.
Puede comprobarse que la condición de mínimo para E(fab) se da en la solución del
siguiente sistema:
6
b
k
( x) x dx 0 ,
(k 0,1, 2,..., n) {2}
a
n
Con ( x) ( x xi )
i 0
Obsérvese que {2} representa un sistema de ecuaciones, por ejemplo para el caso
de tres puntos x0, x1, x2, resulta el sistema de tres ecuaciones:
b
( x x0 ) ( x x1 ) ( x x2 ) dx 0
a
b
{3} ( x x0 ) ( x x1 ) ( x x2 ) x dx 0
a
b
( x x0 ) ( x x1 ) ( x x2 ) x 2 dx 0
a
El inconveniente de resolver un sistema de ecuaciones de este tipo está en que los
términos de la izquierda son polinomios de grado cuarto, entonces la resolución no
es sencilla. Sin embargo, la ventaja está en que siempre que tomemos el caso de 3
puntos nos encontramos con el mismo sistema de ecuaciones expresado en {3},
(observemos que es independiente de la función f(x) ), lo único que cambia de un
caso a otro son los extremos a y b.
Hay más de una forma de proceder, nosotros aquí seguiremos el método de GaussLegendre que consiste en realizar una transformación del intervalo de integración,
de tal manera que:
[a, b]
→
[-1, +1]
{4}
Y posteriormente resolver el sistema {3} para n puntos en [-1, +1]. A continuación
se establece en una tabla tanto los valores xi del soporte como los de los coeficientes
ai de {1}, para distintas posibilidades (n=2, 3, 4, …). Esa tabla nos servirá para
siempre, según el n que escojamos, los valores de la fórmula {1} los copiaremos de
la tabla (ver página siguiente).
Previamente debemos realizar la transformación {4}, lo cual se hace con el
siguiente cambio:
(b a )t b a
x
2
dx b a dt
2
Una vez realizado el cambio, se tiene:
7
1
b
f ( x ) dx
a
ba
f
2 1
(b a )t b a
dt
2
Y es ahora cuando consultaremos la tabla de abajo para obtener el resultado de la
1
integral
f (t ) dt .
1
n
Puntos xi
Coeficientes ai
2 +0.5773502692 1.0000000000
-0.5773502692 1.0000000000
3 +0.7745966692 0.5555555556
0.0000000000 0.8888888889
-0.7745966692 0.5555555556
4 +0.8611363116
+0.3399810436
-0.3399810436
-0.8611363116
0.3478548451
0.6521451549
0.6521451549
0.3478548451
5 +0.9061798459
+0.5384693101
0.0000000000
-0.5384693101
-0.9061798459
0.2369268850
0.4786286705
0.5688888889
0.4786286705
0.2369268850
1
Cuadro de soluciones cuadratura gaussiana para
f (t ) dt
1
Ejemplo de aplicación:
Como un ejemplo de aplicación vamos a calcular por este método la siguiente
integral:
3/ 2
e
x2
dx
1
Primero, mediante un soporte de 2 puntos, o sea n=2. Hacemos el cambio indicado:
x
t 5
1
, dx dt
4
4
La transformación {4} correspondiente es:
1
1.5
e
1
x2
2
1 (t 5)
dx e 16 dt
4 1
2
(0.5773502692 5)
( 0.5773502692 5)
1
16
16
1.0000 e
1.0000 e
4
8
2
0.1094003
En segundo lugar, utilizaremos un soporte con n=3 para obtener una mejor
aproximación.
1
1.5
e
1
x2
1
dx e
4 1
( t 5) 2
16
dt
1
[0.5555555556 e
4
(0.7745966692 5) 2
16
0.5555555556 e
0.8888888889 e
( 0.7745966692 5)2
16
(0 5) 2
16
0.1093642
Este último resultado tiene ya una exactitud de 6 decimales, bastante aceptable en la
mayoría de los casos.
9