Problemas - Unican.es
Anuncio

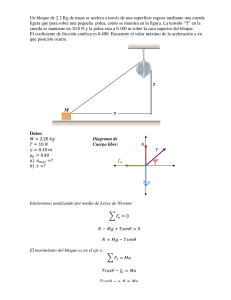
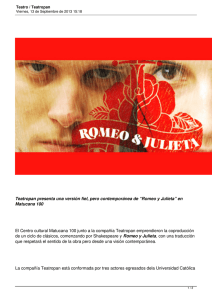
Examen de Física-1, 1° Ingeniería Química Examen final. Enero de 2014 Problemas (Dos puntos por problema). 2) Un bloque de masa m1 = 2 kg y un bloque de masa m2 = 6 kg Problema 1: Un bloque desinmasa y = 2 kguna 1sobre están masamm2 2) Un bloque de conectados masa m1 = 2por kg una y uncuerda bloque de masa = 6 kg polea en forma deun disco sólido que tiene de radio Runa 0.250 men y masa M = bloque desin masa están m2 = 6=kg están conectados por una cuerda masa sobre polea 10 kg. Se permite que estos bloques se muevan sobre forma de disco sólido que tiene de radio R = 0.250 m y masa M = un bloque conectados por una cuerda sin masa sobre en forma de cuña de ángulo θ = 30º.sobre El coeficiente de fricción 10 kg. Se fijo permite que estos bloques se muevan un bloque una poleapara en ambos forma bloques. de disco sólido que tiene cinética es 0.360 fijo en forma de cuña de ángulo θ = 30º. El coeficiente de fricción un radio Se hace falta R = 0, 250 m y masa M = 10(0.2) kg . (no Calcular el momento de inercia de la polea cinética es a) 0.360 para ambos bloques. la ecuación deldemomento permite estos bloques seinercia) muevan a) Calculardemostrar el momento de que inercia la poleade (0.2) (no hacesobre falta b) ecuación Calcular por energías velocidad del de sistema un del bloque fijo en forma de cuña ángulocuando los demostrar la momento de la inercia) bloques se han 1demfricción (0.5). b) Calcular por energías la velocidad del sistema cuando los 30°. El desplazado coeficiente cinética es 0,360 Trace diagramas de cuerpo libre de ambos bloques y de la polea (0.3). bloques se c) han desplazado 1 m (0.5). para ambos bloques. d) Determinar la aceleración de losbloques dos bloques y la aceleración angular de la polea (0.5). c) Trace diagramas de (a) cuerpo libre de ambos y de la polea Calcular el momento deambos inercia dede(0.3). lalapolea (0,2 puntos). No hace falta e) Determinar las tensiones la cuerda lados polea d) Determinar la aceleración de los dosenbloques y laa aceleración angular de la(0.5). polea (0.5). demostrar la ecuación del momento de inercia. e) Determinar las tensiones en la cuerda a ambos lados de la polea (0.5). (b) Trazar los diagramas de cuerpo libre de ambos bloques y de la polea (0,3 puntos). SOLUCION(c) Calcular por energías la velocidad del sistema cuando los bloques se han SOLUCION desplazado 1 m (0,5 puntos) (asumid que el sistema parte del reposo). 1 bloques 2 (d) Determinar aceleración de Ilos y la aceleración angular de la a) El momento de inercialade la polea será: = dos MR 2 = 0.3125 kgm 1 2 poleade(0,5 puntos). a) El momento de inercia la polea será: I = MR 2 = 0.3125 kgm 2 (e) Determinar las tensiones2 de la cuerda a ambos lados de la polea (0,5 puntos). b) Tomando como sistema todo el conjunto junto con la Tierra y aplicando la conservación de la energía: b) Tomando como sistema todo el conjunto junto con la Tierra y aplicando la conservación de la Solución: energía: !Esist. = 0 " !K + !U grav. + !Etérmica = 0 (a) El momento de inercia de la polea vendrá dado por !Esist. = 0 " !K + !U grav. + !Etérmica = 0 2 1 1 2 1 v &kg × 0, 250 m = 0, 3125 kg × m 2 . I =1 MR 2 =1 #10 " m1v 2 + 2m1v 22 + 2I (% ( )) m(2 gd sen! )+ µ m1gd + µ m2 gd cos! = 0 1 12 1 2# v & 2 $ R ' " m1v 2 + m1v 2 + I % ( ) m2 gd sen! + µ m1gd + µ m2 gd cos! = 0 2 2 Sin tener 2 $ R' " (b) v = 0.786 m/sen cuenta el peso de la polea y la reacción del enganche sobre ella (que no intervendrán en las ecuaciones de rotación de la polea ya que el brazo de su momento " v = 0.786 m/s es nulo), entonces c) Sin tener en cuenta el peso de la polea y la reacción del enganche sobre ella ya que no intervienen en las ecuaciones: c) Sin tener en cuenta el peso de la polea y la reacción del enganche sobre ella ya que no intervienen en ! ! ! las ecuaciones: N ! 2 ! ! a1 N ! T1 ! !1 N T ! 2 2 ! a1 T N1 2 ! T1 T2 T ! 2 2 a2 ! 1 ! ! 2 Froz.,2 a!2 ! 1 Froz.,1 ! ! T1 ! mg Froz.,2 ! Froz.,1 ! T1 mg mg ! ! ! m ! ! ! ! ! !g ! ! m g + N + T + F = m a m g + N + T T2 R ! T1R = I! 1 1 1 roz.,1 1 2 2 2 + Froz.,2 = m a2 ! ! ! ! ! ! ! ! ! ! m1g + N1 + T1 + Froz.,1 = m a1 m2 g + N 2 + T2 + Froz.,2 = m a2 T2 R ! T1R = I! d) Para calcular la aceleración común a los dos cuerpos podemos utilizar el resultado del apartado b): d) Para calcular la aceleración común a los dos cuerpos podemos utilizar el resultado del apartado b): a v 2 = 2ad ! a = 0.309 m/s2 ! ! = = 1.23 rad/s2 a R v 2 = 2ad ! a = 0.309 m/s2 ! ! = = 1.23 rad/s2 R e) Para calcular las tensiones aplicamos la segunda ley de Newton: e) Para calcular las tensiones aplicamos la segunda ley de Newton: T1 ! Froz.,1 = m1a " T1 = Froz.,1 + µ m1g + m1a = ( µ g + a ) m1 = 7.67 N (c) Consideremos el sistema formado por la Tierra, las dos masas, la cuerda y la polea. Como hay fuerzas disipativas (el rozamiento), entonces la energía mecánica del sistema cambiará, verificándose que la variación de la energía mecánica es igual al trabajo realizado por las fuerzas de rozamiento. Si tomamos como cero de energía potencial gravitatoria la base del bloque, y suponemos que la altura del bloque 1 inicialmente es h1ini y la altura inicial del bloque 2 es h2ini , entonces la energía mecánica inicial toma el valor ini Emec = K1 + K 2 + K polea +U1pot grav +U 2pot grav 2 2 1 1 1 2 = m1v1ini + m2 v2ini + Iω ini + m1gh1ini + m2 gh2ini 2 2 2 ini ini = m1gh1 + m2 gh2 , donde hemos supuesto que el sistema parte del reposo y las velocidades iniciales de las dos masas y la polea son nulas. Después de que los bloques hayan recorrido un metro, el objeto 1 seguirá a la misma altura mientras que el objeto 2 se encontrará a una altura con respecto a la base de h2ini − d sin θ , donde d = 1 m. Por lo tanto fin Emec = K1 + K 2 + K polea +U1pot grav +U 2pot grav 2 2 1 1 1 2 = m1v1fin + m2 v2fin + Iω fin + m1gh1fin + m2 gh2fin 2 2 2 2 2 1 1 1 2 = m1v1fin + m2 v2fin + Iω fin + m1gh1ini + m2 g ( h1fin − d sin θ ), 2 2 2 y la variación de la energía mecánica vendrá dada por fin ini ΔEmec = Emec − Emec 2 2 1 1 1 2 = m1v1fin + m2 v2fin + Iω fin − m2 gd sin θ . 2 2 2 Esta variación en la energía cinética tiene que ser igual al trabajo disipado por las fuerzas de rozamiento, entonces Wroz = −µ m1gd − µ m2 g cosθ d. Como ΔEmec = Wroz , entonces 2 2 1 1 1 2 m1v1fin + m2 v2fin + Iω fin − m2 gd sin θ = −µ m1gd − µ m2 gd cosθ . 2 2 2 Si ahora tenemos en cuenta que, como las cuerdas son inextensibles, el módulo de la v velocidad final de los dos cuerpos tiene que ser el mismo ( v1fin = v2fin ≡ v ) y que ω = , R entonces 2 $! v $ 1 1 1!1 m1v 2 + m2 v 2 + # MR 2 &# & − m2 gd sin θ = −µ m1gd − µ m2 gd cosθ , %" R % 2 2 2"2 1! 1 $ 2 # m1 + m2 + M & v = −µ m1gd − µ m2 gd cosθ + m2 gd sin θ 2" 2 % v= −µ m1gd − µ m2 gd cosθ + m2 gd sin θ = 0, 786 m/s. 1! 1 $ # m1 + m2 + M & 2" 2 % (d) Para calcular la aceleración común de los dos cuerpos, podemos utilizar los resultados del apartado anterior, v 2 = 2ad ⇒ a = v2 = 0, 309 m/s2 . 2d Para cada una de las dos masas, la aceleración llevará una dirección paralela al bloque sobre el que se sustentan. El módulo de la aceleración angular de la polea se puede calcular a partir de α= a R ⇒ α = 1, 23 rad/s2 . Como está girando en el sentido de las agujas del reloj, y siguiendo el criterio convencional de signos (los ángulos crecen en sentido antihorario), su signo sería negativo. (e) Para calcular las tensiones, descomponemos las fuerzas en los diagramas de cuerpo aislado del apartado (b) según las direcciones de los ejes y aplicamos la segunda ley de Newton. Para el cuerpo 1, escogemos que el eje x sea horizontal (sentido positivo hacia la derecha) y el eje y vertical (sentido positivo hacia arriba). Si proyectamos las fuerzas a lo largo del eje x , T1 − Froz,1 = m1a ⇒ T1 = Froz,1 + m1a = µ N1 + m1a = µ m1g + m1a = 7, 674 N. Para el cuerpo 2, escogemos que el eje x sea paralelo al plano inclinado (sentido positivo hacia abajo) y el eje y perpendicular al plano inclinado (sentido positivo hacia arriba). Si proyectamos las fuerzas a lo largo del eje x , m2 gsin θ − T2 − Froz,2 = m2 a ⇒ T2 = m2 gsin θ − Froz,2 − m2 a = m2 gsin θ − µ N 2 − m2 a = m2 gsin θ − µ m2 g cosθ − m2 a = 9, 214 N. Podemos comprobar que se cumple la tercera condición, T1R − T2 R = (T1 − T2 ) = Iα. Como el módulo de T2 > T1 , entonces la aceleración angular es negativa, de acuerdo con el resultado del apartado (d). Problema 2: Usted sostiene un libro contra la pared apretándolo con su mano. La fuerza forma un ángulo θ con la pared como indica la figura. La masa del libro es m y el coeficiente de fricción estática entre el libro y la pared es µ s . (a) Dibujad claramente el diagrama de “cuerpo aislado” para el libro. (0,4 puntos). (b) Calculad la magnitud de la fuerza que usted debe ejercer para (apenas) mantener el libro estacionario (que no caiga hacia abajo) si se está empujando con un ángulo inferior a 90° (0,4 puntos). (c) ¿Para qué valor del ángulo θ la magnitud de la fuerza requerida es la más pequeña posible? ¿Cuál es la magnitud de la menor fuerza posible? (0,4 puntos). (d) Si usted empuja a un ángulo mayor de 90°, debe hacerlo muy fuerte para sostener el libro en su lugar. ¿Para qué valor del ángulo se hará imposible sostener en su lugar al libro? (en este último apartado, medir el ángulo entre la fuerza aplicada y el semieje positivo del eje horizontal) (0,8 puntos). (a) Dependiendo de si el ángulo θ es inferior (panel izquierdo) o superior (panel derecho) a 90°, el diagrama de cuerpo aislado vendrá dado por (b) Elegimos un sistema de ejes en el que el eje x sea horizontal (sentido positivo hacia la derecha) y el eje y vertical (sentido positivo hacia arriba). En este apartado, asumimos que el ángulo θ es inferior a 90°. La fuerza de rozamiento estática tendrá un valor Ff ≤ µ s N. Para un ángulo θ dado, esta fuerza varía dependiendo de cuánto valga el módulo de la fuerza aplicada F Justo en el límite en el cuál el objeto permanece estacionario (sin aceleración), la fuerza de rozamiento estático toma el valor límite Ff = µ s N. En ese momento, descomponemos las fuerzas en las componentes horizontal y vertical y aplicamos la segunda ley de Newton. ∑F ∑F x = F sin θ − N = 0, y = −mg + F cosθ + Ff = −mg + F cosθ + µ s N = 0. En la primera ecuación podemos despejar la normal que podemos sustituir en la segunda. N = F sin θ , −mg + F cosθ + µ s F sin θ = 0. De la segunda de estas ecuaciones podemos despejar el módulo de la fuerza F ( cosθ + µ s sin θ ) = mg, F= mg . cosθ + µ s sin θ (c) La magnitud de la fuerza será mínima cuando el anterior denominador sea máximo. Esto ocurrirá cuando d (cosθ + µs sinθ ) = 0 dθ Derivando la expresión anterior e igualando a cero encontramos el valor del ángulo θ min para el cuál el módulo de la fuerza es mínimo d (cosθ + µs sinθ ) = 0 ⇒ − sinθ min + µs cosθ min = 0 ⇒ dθ θ min = arctan µ s . sin θ min = tan θ min = µ s . cosθ min Para comprobar que efectivamente el denominador es un máximo en ese punto, calculamos la derivada segunda para ese ángulo, d2 (cosθ + µs sinθ ) = 0 ⇒ dθ 2 θ min −cosθ min − µ s sin θ min = −cosθ min − sin θ min −cos2 θ min − sin 2 θ min −1 sin θ min = = . cosθ min cosθ min cosθ min Como hemos supuesto que el ángulo es < 90°, el coseno del denominador es positivo y la derivada segunda es negativa. Esto demuestra que efectivamente, el denominador que aparece en la expresión del módulo de la fuerza es máximo en θ min . En ese punto, el módulo de la fuerza vale mg mg mg = = = mg cosθ min . 2 cos θ min + sin 2 θ min cosθ min + µ s sin θ min cosθ + sin θ min sin θ min min cosθ min cosθ min Si queremos escribir el coseno como función de la tangente del ángulo, hacemos uso de la relación trigonométrica F= 1 cosθ min = 1+ tan 2 θ min , con lo que F = mg cosθ min = mg 2 1+ tan θ min = mg 1+ µ s2 . (d) En este caso, el ángulo es superior a 90° y la componente de la fuerza externa en la dirección vertical apunta hacia abajo. La fuerza de rozamiento estática tomará de nuevo un valor Ff ≤ µ s N y es la única fuerza que tira del libro hacia arriba. De nuevo, justo en el límite en el cuál el objeto permanece estacionario (sin aceleración), entonces la fuerza de rozamiento estático toma el valor límite Ff = µ s N. En ese momento, descomponemos las fuerzas en las componentes horizontal y vertical y aplicamos la segunda ley de Newton. ∑F ∑F x = F cosθ − N = 0, y = −mg − F sin θ + Ff = −mg − F sin θ + µ s N = 0. (en estas ecuaciones, hemos tomado el ángulo θ como el ángulo que forma la fuerza aplicada con el semieje positivo de las x ). De nuevo, despejando la normal en la primera y sustituyendo en la segunda, N = F cosθ , mg − F sin θ + µ s F cosθ = 0 ⇒ F = mg . (sinθ − µs cosθ ) Si el ángulo va creciendo, el módulo de la fuerza necesaria para mantener el objeto en equilibrio se va haciendo cada vez más grande. Llegará un momento, para un determinado ángulo crítico, en el cual el módulo de la fuerza se hará infinito. Esto ocurre cuando sin θ max − µ s cosθ max = 0 ⇒ µ s = sin θ max = tan θ max cosθ max ⇒ θ max = arctan µ s Para ángulos mayores será imposible mantener el objeto en equilibrio, por muy grande que sea el módulo de la fuerza aplicada. (d) P9.47 The total linear momentum of the system can be calculated as P or as P Either gives P m1 v 1 e15.0 i Mv CM m2 v2 j 5.00 j kg m s Problema 3: Romeo (77,0 kg) entretiene a Julieta distance from shore to center of boat (55,0 x kg) tocando su guitarra desde la parte length of boat trasera de un bote que se encuentra en reposo x distance boat moves as Juliet moves toward Romeo sobre el agua. Romeo se encuentra a 2,70 m de The centerque of mass Julieta, estástays enfixed. la parte delantera del bote. MJ x 2 M Después de M lab x serenata, Julieta se mueve R x 2 Before: x CM cuidadosamente hacia M B laM parte M R trasera del bote J FIG. P9.47 para darle un beso en la mejilla a Romeo. (a) Calcular la posición del centro de MB x x MJ x 2 x MR x 2 x masas del sistema Romeo-Julieta-bote antes y después de que Julieta se haya movido After: x CM M B M J el M bote (1 punto). (b) ¿Cuánto se desplaza de 80,0 kg de peso hacia la orilla hacia la R 55.0 77.0(1 punto). cuál está orientado? x Let a FG H Solución: x 2 55.0 212 d c h f c c i h h c d i IJ a 80.0 55.0 77.0f a55.0 2 K 2 55.0a 2.70f 0.700 m h 77.0 f 212 Llamemos x a la distancia que hay desde la orilla hasta el centro de gravedad del bote, l a la longitud del bote y x ' a la distancia que se desplaza el bote cuando Julieta se mueve hacia Romeo. Como no hay fuerzas externas sobre el sistema, el momento total del sistema JulietaRomeo-bote se conserva. Y como todo el sistema estaba inicialmente en reposo (momento inicial del sistema nulo), entonces el momento será nulo en todo momento. En otras palabras, el centro de masas del sistema permanece fijo. Antes de que Julieta se moviera hacia Romeo, el centro de masas estaba situado en: ( " " l% l %+ * M bote x + M Julieta $ x − ' + M Romeo $ x + '# # 2& 2 &, ) antes xCM = . ( M bote + M Julieta + M Romeo ) Después de que Julieta se haya movido hasta Romeo, el centro de masas del sistema estará situado en ( + " " l l ' '% '% * M bote ( x − x ) + M Julieta $ x + − x ' + M Romeo $ x + − x '# & # &, 2 2 ) después xCM = . ( M bote + M Julieta + M Romeo ) Como la posición del centro de masas no ha podido cambiar durante el proceso, podemos igualar las dos expresiones anteriores ( + " " " " l% l %+ ( l l ' '% '% * M bote x + M Julieta $ x − ' + M Romeo $ x + '- * M bote ( x − x ) + M Julieta $ x + − x ' + M Romeo $ x + − x '# # # & # &, 2& 2 &, ) 2 2 ) = , M + M + M M + M + M ( bote Julieta Romeo ) ( bote Julieta Romeo ) " " " % " % l% l% l l M bote x + M Julieta $ x − ' + M Romeo $ x + ' = M bote ( x − x ' ) + M Julieta $ x + − x ' ' + M Romeo $ x + − x ' ', # # # & # & 2& 2& 2 2 M bote x ' + M Julieta x ' + M Romeo x ' = M Julieta l, x' = M Julieta l = 0, 700 m. M bote + M Julieta + M Romeo