Comprobación y compensación de poligonales
Anuncio

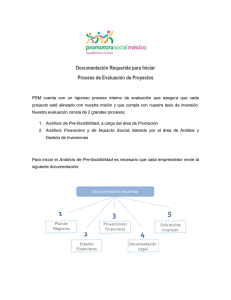
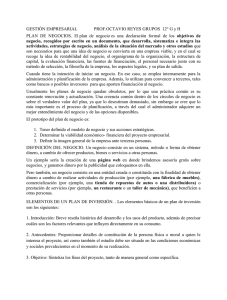
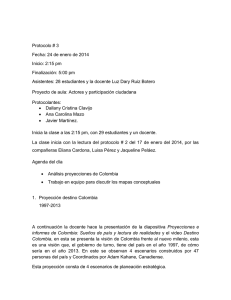
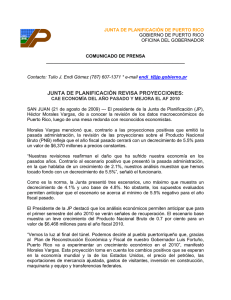
UNIVERSIDAD AUTÓNOMA CHAPINGO DEPARTAMENTO DE IRRIGACIÓN Cap 1. Introducción (Definiciones y conceptos básicos) COMPROBACIÓN Y COMPENSACIÓN DE POLIGONALES CERRADAS Profesor: M. C. Fco. Raúl Hernández Saucedo 1 Error de cierre en una poligonal cerrada y B ABy BCy A Ey ET A' C CD y F A ’y D D Ey F EFy E ABx F A ’x Ex EFx BCx x CD x D Ex 2 Comprobación y compensación de una poligonal cerrada N F E Az AB A D B C La Tolerancia Angular definida previamente para el trabajo fue: TA = a n y la Tolerancia lineal: TL = 1/5000. 3 Datos de campo para la comprobación y compensación de la poligonal cerrada del ejemplo (1) (2) (3) (4) (5) EST. PV AZIMUT AH DH O A B B 161o 14' C ' 124 04 124 19 m 253.08 EA = n ∑ i= 1 AIi − 180° (n − 2) 461.35 C D 079 22 336.28 D E 135 37 207.06 E F 141 52 283.63 F A 114 48 241.55 720 02 1782.95 SUMAS Comprobación Angular E A = 720° 02' − 720° 00° = 02' TA = 01' n TA = 01'× 2.45 = 02.45' E A < TA 4 OK Compensación angular de la poligonal cerrada del ejemplo (1) (2) (3) (4) (5) (6) EST. PV AZIMUT AH DH AH CORREGIDO O A B B 161o 14' ' m O ' 124 04 253.08 124 04 C 124 19 461.35 124 19 C D 079 22 336.28 079 21 D E 135 37 207.06 135 37 E F 141 52 283.63 141 52 F A 114 48 241.55 114 47 720 02 1782.95 720 00 SUMAS 5 Proyeccionesrectangulares rectangularesde delos loslados ladosde delalaPoligonal, Poligonal,para parasu su Proyecciones comprobaciónlineal lineal comprobación (1) (2) (7) EST PV AZIMUT DIRECTO (8) (9) (10) PROYECCIONES EN x POSITIVAS (+) NEGATIVAS (-) (11) PROYECCIONES EN y POSITIVAS (+) NEGATIVAS (-) A B 161 14 081.41961 239.62540 B C 105 33 444.46315 123.67834 C D 004 54 028.72400 D E 320 31 131.65987 159.81089 E F 282 23 277.03126 060.82480 F A 217 10 145.92896 SUMAS AzDi = AzIi − 1 ± α 554.60676 i − 1,i 335.05100 554.62009 192.48673 555.68669 Px i = L i × sen ( Az i ) ; 555.79047 Py 6 i = L i × cos( Azi ) Comprobación lineal lineal Comprobación Ex = 554.60676 - 554.62009 = - 0.01333 Ey = 555.68669 - 555.79047 = - 0.10378 y el Error Total se calcula con la fórmula: ET = Ex 2 + Ey 2 ) ET = 0.1046325824 El Error Unitario se calcula mediante: Eu = ET/P Eu = 0.1046326 /1782.95 = 0.000058685 Que equivale a: 1/17040.1295 < 1/5000 = TL 7 OK Compensación Lineal: Lineal: Regla Regla de de la la Brújula Brújula Compensación La Regla de la Brújula se basa en las consideraciones siguientes: a) Las mediciones angulares tienen el mismo grado de confianza que las mediciones lineales y, b) Los errores accidentales cometidos son directamente proporcionales a las longitudes de los lados. De las consideraciones anteriores, se desprende que las correcciones a las proyecciones se calculen proporcionalmente a sus longitudes, lo que matemáticamente queda expresado como sigue: Cxi Ex = − Li LT Cyi Ey = − Li LT 8 Compensación Lineal Lineal Compensación Regla de de la la Brújula Brújula Regla Las correcciones se calculan así: Ex Cxi = − × Li LT Ey Cyi = − × Li LT 9 Cálculo de de proyecciones proyecciones yy coordenadas coordenadas Cálculo Las proyecciones corregidas se calculan así: PCxi = Pxi + Cxi PCyi = Pyi + Cyi El cálculo de coordenadas es como sigue: xi + 1 = xi + PCxi yi + 1 = yi + PCyi 10 Correcciones lineales lineales yy proyecciones proyeccionescorregidas corregidas Correcciones (1) (2) EST PV (12) (13) CORRECCIONES (14) (15) PROYECCIONES CORREGIDAS x Cxi Cyi PROYECCIO NES POSITIVAS (+) PROYECCIO NES NEGATIVAS (-) (16) (17) PROYECCIONES CORREGIDAS y PROYECCIO NES POSITIVAS (+) PROYECCIO NES NEGATIVAS (-) A B +0.00189 +0.01473 081.42150 239.61067 B C +0.00345 +0.02686 444.46660 123.65148 C D +0.00251 +0.01957 028.72651 D E +0.00155 +0.01205 131.65832 159.82294 E F +0.00212 +0.01651 277.02914 060.84131 F A +0.00181 +0.01406 145.92715 SUMAS +0.01333 +0.10378 CONCLUSIONES 554.61461 335.07057 554.61461 CORRECTO 192.47267 555.73482 555.73482 CORRECTO 11 Regla del del Tránsito Tránsito Regla Se basa en las premisas de que las mediciones angulares son más precisas que las mediciones lineales, lo que implica dar un mayor grado de confianza a las primeras. Por lo tanto, en este caso las correcciones a las proyecciones de los lados se calculan proporcionalmente a estas últimas. Recuérdese que las proyecciones de los lados se calculan a través de las mediciones angulares, lo que constituye una forma de involucrar a los ángulos en el proceso de corrección lineal. Algebraicamente se expresa así: Cxi = − Pxi Ex ∑ n i= 1 Pxi Cyi = − Pyi Ey ∑ n Py i i= 1 12 Regla del del Tránsito Tránsito Regla Las correcciones se calculan así: Cxi = − Cyi = − Ex ∑ n Px i i= 1 Ey ∑ n Py i i= 1 × Pxi × Pyi 13 Cálculo de de proyecciones proyecciones yy coordenadas coordenadas Cálculo Las proyecciones corregidas se calculan así: PCxi = Pxi + Cxi PCyi = Pyi + Cyi El cálculo de coordenadas es como sigue: xi + 1 = xi + PCxi yi + 1 = yi + PCyi 14 Fin de la presentación M.C. Fco. Raúl Hernández Saucedo 15