Distinción entre caos y azar en series ruidosas mediante
Anuncio

ESTADISTICA ESPANOLA
Vol. 37, Núm. 139, 1995, págs. 287 a 304
Distinción entre caos y azar en series
ruidosas mediante predicciones locales
baricéntricas ( *)
por
FERNANDO FERNANDEZ RODRIGUEZ
Departamento de Econornía Aplicada
Universidad de Las Palmas de Gran Canaria
JUAN MARTIN GONZALEZ
Departamento de Física
Universidad de Las Palmas de Gran Canaria
RESUMEN
En este trabajo los autores contrastan la presencia de caos determinista en diversas series económicas ruidosas analizando las
posibilidades de predicción a corto plazo por medio de predicciones
locales baricéntricas. Se desarrollan algunos estadístícos con el fin
de separar, en una serie «ruidosa», las observaciones de comportamiento determinista de las que muestran comportamiento independiente de las anteriores.
Palabras c/ave: caos determinista, predicción, ocurrencias an^logas.
Clasificación AMS: 62P20, 90A20, 62M 10.
(*) Los autores agradecen su soporte econórnico al Ministerio de Educación español a través
del Proyecto DGICYT PB94-0425.
f^:;^"T AI)Iti TI( > f•tiF' ^N^ ^I ^1
?KK
1.
INTRODUCCION
La teoría del caos determinista ha posibilitado la modelización y prediccibn
de muchas series temporales cansideradas tradicionalmente como ruidos de
comportamiento puramente aleatorio.
Las ciencias aplicadas han prestado recientemente gran interés por el caos
determinista porque las trayectorias generadas por determinadas ecuaciones en
diferencias no lineales tienen apariencia puramente aleatoria. Dichas trayectorias caóticas resultan indistinguibtes por los métodos lineales clásicos (análisis
espectral y funciones de autocovarianza}, de un genuino ruido blanco de naturaleza aleatoria. Tal ocurre, por ejemplo, con la serie temporal generada por la
ecuación logística X^ + 1= 4X^ (1 -- Xl), para ^c'o E(0, ^).
No obstante, la detección empírica de dinámicas caóticas es un problema
extremadamente sutil debido a que la reconstrucción del atractor extraño que
origina la dinámica determinista es sumamente sensible a los parámetros usados en los tests no lineales [Chen ( 1992)].
La Economía presenta actualmente mucho interés por las dinámicas caóticas [Medio ( 1992} y Lorenz ( 1993)]. No obstante, el debate entre la existencia
de comportarniento aleatorio o caótico es más agudo, si cabe, debido a que la
longitud de las seríes disponibles es, por lo general, demasiado pequeña para
garantizar la fiabilidad estadística de los tests que suelen usarse para detectar
el caos.
En Ramsey, Sayers y Rothman (1990), los autores concluyen que los métodos más usuales de detección experimental del caos, tales como la Dimensión
de Gorrelación, los exponentes de Lyapunov y la entropía de Kolmogorov, no
pueden aplicarse de modo fiable a pequeños grupos de datos tales como los
que se utilizan en la Economía.
En el presente trabajo desarrollamos un test para contrastar la existencia de
comportamiento caótico determinista en una serie temporat y distinguirlo del genuino ruido blanco. Para ello nos basaremos en la siguiente idea: en una serie
temporal caótica es posible realizar predicciones a corto plazo a base del estudio de patrones de comportamiento, análogos al presente, ocurridos en el pasado; en el ruido blanco esto es imposible.
Gomo aplicación práctica del test tratamos diversas series, de apariencia ruidosa, analizadas ya en la literatura económica por las técnicas más usuales de
detección del caos: la serie de parados de Sayers (1986), la de rentabilidades
bursátiles de Scheinkman y LeBaron (1989) y la del índice Divisia de Barnet y
Chen (1988). Todos los autores nos han ofrecido amablemente sus datos.
[)I:^T1N('I()N fNTRF^ C'A()S Y.A"I.AR EN tiF^.RIF^-ti Rl't1N)tiA^
2.
?K^
DETECCION DEL CAOS DETERMINISTA Y PREDICCION
POR OCURRENCIAS ANALOGAS
Seá {x,, ..., x„} una serie finita de observaciones escalares que supondremos estacionaria. EI concepto de Espacio de Fases asociado a la serie temporal
[Schuster (1988) para una panorámica general] es la base de todo el desarrolla
posterior, porque permitirá examinar la evolución de los patrones de comportamiento dentro de la serie.
En este esquema, los segmentos formados por d términos consecutivos de
la serie temporal se consideran puntos de un espacio vectorial real cuya dimensión es denominada Dimensión de Inmersión (DI = d). Tales puntos se denotarán, a partir de ahora, por:
x;d = ( x; , x; _ , ,
X; _ ^,^ _ ^ ^ }
y se flaman, a menudo, d-historias. EI conjunto de todas las d-historias es considerado como e1 espacio de fases de un sistema dinámico d-dimensional, definido por la serie temporal, y reflejará sus propiedades. EI espacio d-dimensional
II^d se denomina entonces Espacio de Fases de la serie temporal.
EI paradigma caótico establece que, pese a la apariencia ruidosa de la serie
original, un ajuste correcto de la dimensión de inmersión d daría lugar a una
cornpleja configuración en el espacio de fases canocida como un atractor extraño. Estos atractores, lejos de estar forrnados por puntos distribuidos a! azar, tienen características geométricas y dinámicas deterministas [Schuster (1988)].
La presencia de caos determinista en una serie temporal suele contrastarse
por dos procedimientos: el test de Grassberger y Procaccia (1983}, y el test
BDS de Brock, Dechet y Scheinkrnan (1987) . Ambos tests se basan en el concepto de Correlación Entera Cd (^), que se define como la probabilidad de que
dos puntos del espacio reconstruido se encuentren a una distancia menor que ^:
Cd(^)=#{(i,Í)lII Xd-X^dll <£,d<_í,j<_n,i^j}l(na--nd)
donde nd = n-(d - 1) es el número de d-historias que pueden considerarse en
la muestra de tamaño n y# representa el número de elementos de un conjunto.
En el test de Grassberger y Procaccia se define la Dimensión de Correlación
como:
Dd =
lim
e--^0
lim
n--^^
[log Cd (^) / log {^}]
Si al aumentar ^a dimensión de inmersión, la Dimensión de Carrelación se
estabiliia en torno a un valor D, para d>_ do, tal comportamiento sería síntarna
E^.S"1AUIST^I('A t^.tiNANOE.A
de una explícacíón determinista de la serie temporal por medio de un atractor
extraño do-dimensional con una dimensión fractal D[Schuster (1988)]. Para un
ruido blanco, fa Dimensión de Correlación Dd crecería ilimitadamente al aumentar d sin Ilegar a saturarse.
EI test BDS, por otra parte, contrasta la existencia de estructuras potencialmente predecibles dentro de la serie temporal.
Si dicha serie es un ruido blanco, la proximidad de dos patrones en una determinada dimensión no condiciona la proximidad de dichos patrones en una dimensión superior; ocurrirá entonces que:
lím
n-^^
Ca (E) = C, (E)d con probabilidad 1
Brock, Dechet y Scheinkman (1988) demuestran que, bajo la hipótesis nula
de ruido blanco para la serie temporal, (Cd (E) - C, (^)d ) n 12 tiene media cero y
está normalmente distribuida. Llamando sd (E) a la desviación típica de las correlaciones enteras, el estadíst+co BDS, w, tendró una distribución N(0,1):
wd (E) ' (,^d (£1 _ ^1 (E)d 1 n 1/2 ^
Sd (£)
^2]
Cuando ^ w^ > 2, podemos rechazar con un 95% de confianza la hipótesis
nula de ruido blanco [Brock, Hsieh y Lebaron (1992) para una amplia visión de
sus aplicaciones].
Provenzale et al. (1992} han sugerido que la distinción entre caos determinista de baja dimensión y el auténtico ruido blanco no debería basarse solamente en estimaciones de la Dimensión de Correlación o el test BDS y deberían
aplicarse otros métodos para analizar series temporales con el fin de extraer
tanta información dinámica como sea posible.
EI método que usaremos en este trabajo para detectar el determinismo en una
serie consiste en analizar, para cada una de las observaciones finales de la serie
(en nuestras simulaciones hemos considerado las cien últimas), !as posibilidades
de predicción a corto plazo. Con ella pretendemos estudiar si los puntos del espacio de fases reconstruido se comportan de acuerdo al principio de predicción por
ocurrencias anólogas. Es decir, tratamos de ver si puntos próximos evolucionan,
a corto plazo, con trayectorias simílares dentro del espacio de fases.
Nuestro test puede ser considerado, entonces, como un caso particular del
test BDS, porque permite analizar separadamente las posibilidades de predicción
de los diferentes patrones de comportamienta dentro de una serie temporal.
Seguimos igualmente la idea central de Farrner y Sidorowich (1987) o Sugihara y May (1990) al considerar que la posibilidad de hacer predicciones a
[)ISTINt'1()N F^N"TitE t'AO.^ Y AI..AR NN Sf^RI^^.S RUI[X)^A:4
291
corto piazo es crucial para detectar la presencia de caos. En esta misma línea,
en Bajo, Fernández y Sosvilla ( i 992a, b) se realizaron este tipo de predicciones
sobre series de tipos de cambio que mejoran las del camino aleatorio.
Con ei fin de separar el comportarníento aleatorio del determinístico no iineal, usaremos varias técnicas no paramétricas de predicción por ocurrencias
anáiogas, introducidas ya por Farmer y Sidorowich (1987), y que describimos a
continuación:
Dada una serie temporal {x^, ..., x„}, un predictor es simplemente una regla
para obtener una estimación Xn +^ para la observación siguiente a la última de la
serie.
La predicción por ocurrencias anáfogas es una técnica de predicción donde
los segmentos de abservaciones sucesivas con un comportamiento dinámico similar son empleados para predecir, por extrapolación, el término siguiente al
que ocupa el final de la serie. Este término se calcula como algún tipo de promedio de las observaciones siguientes a los segmentos que se utilizan. Como
ejemplo más simpie pueden citarse los predictores lineaies autorregresivos,
ajustados localmente, del tipó:
xn+ 1 = a0 (n) xn + a, (n) xn_, + ... + ad_ 1 (n) Xn_ ^d_ ^^ + b (n)
introducidos por Farmer y Sidorowich en (1987). En Gershenfed y Weigend
(1994) se encuentra una exposición amplía de este tipo de predicciones.
La ocurrencia análoga en un comportamiento dinámico se mide en térrninos
de algún concepto métrico dei espacio vectorial real d-dimensional: puntos próximos corresponden a segmentos similares en la serie temporal. La forma rnás
común de buscar la ocurrencia análoga a x a consiste en encontrar un determinado número k de puntos x;d del espacio de fases que minimicen la función:
Il x;°'--xdll
[3]
Alternativamente, podemos minimizar cualquiera de las siguientes funciones:
^-- P (x;°', x d) 0 1-- cos (x;d, x d i
[4l
En Fernández (1992) se establece la equivafencia enire las ocurrencias análogas que se obtienen al utilizar las tres funciones para una serie caótica.
Con el fin de medir la calidad de las predicciones, podemos predec'rr sucesivos datos de la serie generando con ello una serie paralela de predicciones que
puede ser comparada con la serie original. La calidad predictiva puede ser establecida por medio del estadístico:
^g,
E=.STAf)1ST1('A WtiPAN()l.A
^
E(n+ 1) _
^ Xn+ 1^ xn+ 1
^
a
donde cs es la desviación típica de la serie temporal.
Si E(n + 1) > 1, nuestra predicción es peor que la predicción constante dada
por la media de la serie. Si E(n + 1) ^ 1, nuestra prediccián es más precisa que
la proporcionada por la media.
Tales errores permiten la obtención de diversas medidas de volatilidad para
series #inancieras [Bajo, Fernández y Sosvilla (1992b); Bajo, Fernández, Mora y
Sosvilla (1994)].
3.
PREDICTORES SIMPLICIALES Y BARICENTRICt^S
Dada una serie temporal {x^, ..., x„}, vamos a introducir un tipo especial de
predictores, por ocurrencias análogas, que nos permitirán realizar nuestro contraste. Los Predictores Simpliciales se construyen de la siguiente forma: tomemos el conjunto de las k d-historias del espacio de fases (vease [1 ]):
xdl^ , ..., xdlw
[s]
que minimizan su distancia con la d-historia final de la serie x d.
La predicción zn +^ de x^ +^ se realiza considerando alguna combiriación lineal convexa de las observaciones:
[/]
t ^^ ..., x^k+ 1
de la serie que siguen a las k d-historias elegidas, es decir:
xn+ 1! a, (n) x^^ + 1 + a2 (n) x;2+ ,+... + ak (n^ x^^+ 1
[8]
donde se supone que:
k
[9]
^a;(n)-1
^_ ^
Los parámetros a; (n ) pueden ser elegidos de muchas formas. La más simple es considerar a; (n) = 1 / k, y en tal caso, por razones geométricas, tal predictor simplicial se Ilama Predictor Baricéntrico xba^, :
X^ar1-1/kx^+^+1/kx^+^+...+1/kx^+^
1
2
k
[10]
L)IST1N('IUN ENTRF C'AOti Y.A"!_AR FN SF^RIF-^ ftl!ICN)SAti
293
La predicción de los datos está condicionada por dos parémetros que deben
ser elegidos a priori, la dimensión de inmersión (DI) y el número de puntos próximos (NPP): z„ + ^ = xn + ^ (DI, NPP).
Suelen establecerse cotas superiores e inferiores en el número de puntos
práximos (NPP) a la hora de construir predictores locales [Farmer y Sidorowich
(1988)].
Debido al carácter loca! de los predictores, la elección de la dimensión de inmersión no debe afectar, en teoria, de forma crucial, a la calidad de las predicciones: en efecto, para series caóticas, el teorema de Takens [Takens (1981)]
asegura que si de un sistema dinámico m-dimensional extraemos como observable una única serie temporal, de modo genérico, la dinámica reconstruida por
rnedio del espacio de fases I^^d de la serie es equivalente, para d> 2m, a 1a dinámica del sistema original.
En la práctica, existe un criterio simpie para determinar tanto una DI como
un NPP óptimos. Tal criterio consiste en realizar diversas predicciones de las últimas observaciones de la serie temporal y elegir una DI y un NPP que minirnicen la suma cuadr^tíca de los errores de predicción:
m
^, (x^,+ ^ (DI, NPP} -- xn+ i)2
Con el fin de contrastar la hipótesis nula de que la serie temporal es un ruido
blanco será necesario demostrar que las observaciones x!^ +^, ..., x1k+ ^ (véase
[7]), que se utilizan en el predictor bar^centrico, pueden ser consideradas como
realizaciones de variables aleatorias independientes en un proceso estocástico.
Consideremos, para ello, un proceso estocóstico discreto dado por una colección de variables aleatorias {X, ,.. ., X„ , .. .} IID, N (o, a), en un espacio de
probabilidad (5^2, F, P} tomando valores en el conjunto II^. Sea {^f'^ (w}, ...,
X^ (w), ...}, X; (w) = x; E II^^ una realización muestral del proceso. Sea S={xd,
d<_ i s n} c I^d, donde x^d representa la d-historia ( x;, x; _ 1, ..., x; _^d_,^), según
la notación introducida en [1 ].
Para cada dimensión de inmersión DI = d, definimos una nueva variable
aleatoria X^ +, d de !a forma:
,
X^^ +, d(w) - X^ +,(w) = x^ + ^, donde j minimiza {^^ x d-- xf°' ^^ en S ^ I^d}
Las observaciones x^ +,,..., x^ +^ de [7] también pueden ser consideradas
2
h
como realizaciones de variables aleatorias X^2 + ^, d,..., X^k+ ^ d, donde d representa la dimensión de inmersión. Para ello, definiremos, de forma análoga:
?94
ES"T.A[)1ST1C'A t^SF'ANOE A
^
X^2 +, d( w) = X^ ^,( w) = x^ t ,, donde j mini miza ^ ^ x d- x1d ^( en S -{x d} ^ I^^°'
,
y asi sucesivamente.
Praposición 1
Las variables aleatorias X^ ^, d , donde i= 1, ,.., k son N(0, cs).
Demostración:
Haremos la demostración para i= 1; en los casos restantes la situación es
anáioga. Tenemos que:
P({w: X^^ + , d(w) ^ x}) - P({w: X^ +, (w) <_ x l ^^ x d- x^d ^^ es mínimo})
= P ({w: X^ + , (w) < x})
[12)
donde la primera igualdad se sigue por definición de X^, +,, d y la segunda porque las variables aleatorias {X, ,.. ., X,,, ...} son IID. X ^, +,, d y X^ +, tienen, por
tanto, la misma función de distribución y entonces X ^^ ♦ ^ d es N(o, a).
Proposición 2
Cada una de las variables aleatorias X^ +^, d con r=. 1, ..., k es independiente de la X^ +,, para toda dimens^ón de ^nmers^ón d.
Demostración:
La construccíón de cada varíable aleatoría X^ + , d se realiza por medio de
una restricción métrica relativa a los valores de las variables X1 ( w) = x^ ,...,
X^ _ d+^( w) = x^ _ d+ ^, donde siempre ocurre que j< n+ 1. Por lo tanto, como
las variables aleatorias {X,, ..., X^ +^, ...} son tID, concluiremos entonces que
los eventos {w: ao ^ X^,+ ,, d(w) <_ bo} y{w: a, <_ X^ +^(w) <_ b,} son independientes para toda r y para cada ao, bo, a,, b, . Entonces tendremos para la función de distribución que:
F(X ^,+ ^, d^ X^ Xn + 1^ Y ^ = Fx• (X ^,+ 1, d^ x) Fxn+, (x^ +^^ Y)
de donde se concluye la independencia.
I^ 3}
DISTIN(_'ION Et^iRE C:AOS Y A"I.AR I:N SF:RIE:S RUI[X)SAS
295
Proposición 3
Las variables aleatorias X^ +^ d, donde r= 1, ..., k, son independientes entre si.
Demostración:
Demostraremos la independencia de X^^ ♦, d y X^2 ♦, d; para cualquier otro
par de variables, la demostrac^ón es análoga.
Teniendo en cuenta que según hemos definido previamente:
X^^ ♦, d(w) = x^ +,, donde j minirniza {^^ x°- x!d ^^ en s}
X^2+,, d(w) = xl +,, donde j minimiza {^^ xd- x^d () en S- {xd^}}
siendo S el conjunto de d-historias de la serie temporal en el espacio de fases.
Se sigue, entonces, que las variables aleatorias X^^+,, d y X^2+, d nunca podrán coincidir en ninguna realizac^ón muestral del proceso.
Por tanto, de la independencia de las variables X^,..., X„ se concluye la independencia de los sucesos {w: ao <_ X*+, d( w) <_ bo} y{w: a, s X*+, d( w} <_
b}
1 para todo a0 , b,
0 a,1 b 1 ; por tanto, la ^ 'variables X'/^+1,d y X'.^2+1,d ^^ erán inde-
pendientes.
Los predictores baricéntricos se caracterizan por la siguiente propiedad de
mínimo:
Proposición 4
Considerando una serie temporal generada a partir de una fiamilia de variables aleatorias independientes e idénticamente distribuidas, el pred'rctor baricéntrico es el predictor local simplicial que minirniza el error cuadrático medio de
predicción.
Demostracián:
Sea x^a+ ^, según [10], la predicción simplicial de la observación x„ ♦ ^, sea
{X ^,..., X„ ♦ ^ } la familia de variables aleatorias I I D, con varianza a2, que generan la serie temporal.
F.S`TA[)ISTIC'A F^aPANOt,A
^y(j
Definimos la variable aleatoria:
^
xn. 1, d ^ a1 (^) x^^+ t, d ♦ ^2 (n) x^^+ 1, d+... + ak (n) X^^+ 1, d
Teniendo en cuenta la independencia de las variables en las proposiciones 2
y 3, las siguientes cálculos son inmediatos:
^
Vaf (Xn + 1
k
Xn+ t, d) - Var (.ñn + t- j-+ ar ^n) x^ + 1, d) ...
r= 1
k
k
=\/ar(Xn+1)+^OC?(n)Vaf(X^+1 d)=CS2+Q2^a?(n)=
r= 1
r= 1
k
[^4]
=62(1 +^^r (n))-a^ im
r= 1
k
Si ^ a? (n) está acotada por números m y M, la desviación típica de los
r
errores crs,m está trivialmente acotada:
a^ (1
+ /?7^1^2 ^ (Ssim ^ Cf (Í
[15]
+ M)t^2
k
a? ( n),
Como tenernos que ar ( n )>_ 0, los valores extremos de la función 1 +^
r- 1
k
su^eta a la condición ^ a(n) = 1, son ^2 y 1+ 1 (máximo absoluto y mínimo
r- t r
k
,
k
relativo, respectivamente). Por la convexidad de la función 1+^ a? (n), el mínir= 1
mo local es global y por tanto:
Q 1+ ^
_<a11^
k ^a. sim
Por otro lado, para predictores baricéntricos es inmediato que:
^
k
= Var (Xn + 1 - ^ ^ / k i^ ^ + 1, d ) _
^ bar = Var (%'^n + 1 - x *ba+ 1 d )
r_ 1
^
k
k
=Var(Xn+t}+^1 /k2Var(X^+t,d)=a2+cs2^,1 /k2=
r- 1
^
= a2 (1 + 1 / k)
r= 1
[17j
DESTIN('1(_)N E;NTRE i'A()S Y AlAR t^N St:RIt:.S RI^tU()SA^
297
que coincide con ei mínimo absoiuto que toma aS,m, con lo que concluye la demostración.
4.
UN TEST DE HIPOTESIS PARA SEPARAR EL COMPORTAMIENTO
CAOTICO DEL AZAR
EI test de hipótesis que describiremos a continuación permitirá contrastar !a
hipótesis nula de ruido bianco frente a la hipótesis alternativa de comportamiento caótico. Mientras qu® el caos será predecible a corto plazo, un genuino ruido
blanco deberá ser impredecible.
Nuestro método permite contrastar por separado la predecibilidad de cada
ObserVaciÓn Xn + y de !a serie formulando varias predicciones baricéntricas con
un número fijo k de puntos práximos y con dimensiones de inmersión variando
entre d, y dm, verificando que la varianza de los errores baricéntricos de predicción es «pequeña». Esto es, admitiremos que !a observación xn +^ es predecible
cu^ndo seamos capaces de predecirla de forma «robusta» en toda una gama de
dirnensianes de inmersión.
Para establecer nuestro contraste de predecibilidad introduciremos una nueva variable aleatoria: e! error baricéntrico de predicción
n
£ bart (d, k} _ X bart (d^
k) -- xn + t
[18]
donde d representa la dimensión de inmersión y k el número de puntas próximos empleados en el predictor baricéntrico.
Busquemos la distribución de E ba^t .
Proposición 5
La variable aleatoria e ba^t tiene una distribución N(0, a(1 / k+ 1)t^2}.
Demastración:
n
k
Dado que E*^^„ + t= ^barn + t (d, f^ - X^ + t =^ 1 / k X*^ + t d-- Xn + 1+ siguiendo las
r
'
r= 1
proposiciones 1, 2 y 3, las variables aleatorias 1 / k X^, + t, d, para r= 1, ..., k, y
Xn + t serán independientes entre sí y tendrán distribuciones N(0, a/ k) y
N {0, a}, respectivamente.
^^8
F^STAUI^;TI('.A F.SPAÑ()LA
^ bar ^ tendrá entonces una distribución normal de media cero y su varianza
será:
cs2 / k 2+.. k. ,+ Q2 / k 2+ a2 = a2 / k+ Q2 ^ Q2 (1 + 1/ k)
con lo que concluye la demostración.
Vamos a contrastar la hipótesis nula de que la familia de variables aleatorias
que generan el proceso es IID, con lo que la varianza de los errores baricéntricos de predicción es a bar = a2 (1 + 1/ k). La hipótesis alternativa será la de relacíón determinista entre las variables, lo que implica errores de predicción mós
pequeños y, por tanto, que la varianza de dichos errores sea significativamente
más pequeña.
Para ello consideraremos el estimador muestral de a bar definido por:
dm
$2 _
m --
,_ ^ ba r
^ [^ bar
2
n+ 1
n+ 1^
d ^ d,
donde Eba+ 1=^ba+ 1(d, k) = X ^a+ , (d, k) - x„ +, es, según [10], el error de predicción baricéntrico de la observación x„ +^ en la serie temporal {x,, ..., x„ ♦ 1}
utilizando una dimensión de inmersibn d y un número k de puntos próximos;
E ^a^ ^ representa la media aritmética de dichos errores de predicción para dimensiones de inmersión d^ , ..., dm.
Como estadístico de prueba uti lizaremos la conocida transformación de s 2
que viene dada por la expresión:
(m - 1) s2
^,2
bar
2
i xm-t
que es una ji-cuadrado con m- 1 grados de libertad; obsérvese que rn es el número de predicciones baricéntricas realizadas sobre xn + 1 al hacer variar la dimensión de inmersión.
Sí elegímos un nivel de sígnificación a, podemos obtener una región crítica
R = [a, b], donde:
f^ [ a^ (m ^21) s2 < b=
] a
[19]
bar
Teniendo en cuenta la expresión [17] para la desviación típica abar, se presentan las siguíentes hipótesis alternativas:
UlST1N('IC)N FNTRE C'AC)S Y A"LAR f:N Sf:RIES RIPIIX)SAS
?99
Hipótesis 0:
En la serie temporal {x,, x2, ..., x„ + ,} generada por una fami{ía de variables
aleatarias flD, hi (0, a), la observación x„ ♦, es 1a realización de una variable
aleatoria independiente de !as restantes:
a cs2 (1 + 1/ k) ^ 2^ b a2 (1 + 1/ k)
s
m-1
m--1
[ 20 ]
Nipótesis 1:
Existe una relación determinista entre la observación x„ +, y sus precedentes porque puede ser predicha, en sucesivas dimensiones de inrnersión, con
errores de predicción pequeños que tendrán, por tanto, varianza significativamente pequeña:
S2 ^ aa2 (1 + t/ k)
m -- 1
5.
[21]
ALGUNOS EJEMPLOS
A continuación analizaremos con nuestro test tres series económicas de
apariencia ruidosa: la serie de parados de Sayers (1986), la serie de rentabilidades bursátiles de Scheinkman y LeBaron (1989) y la serie del índice Divisia de
agregados monetarios de Barnet y Chen (1988). Sobre las dos primeras series,
ni Sayers (1986) ni Scheinkman y LeBaron (1989) pudieron contrastar de forma
concluyente la existencia de caos. Sobre !a última, Barnet y Chen sí.
Nuestros resultados pueden describirse en ia siguiente forma: debido a su
carácter no estacionario, hemos tomado primeras diferencias a la serie de agregados monetarios. La serie de parados y de rentabilidades bursátiles mostraban
comportamiento estacionario en media.
En las dos primeras series, el estadístico BDS toma valores muy cercanos a
cero. En !a de agregados monetarios toma un valor en torno a diez, señalando
ef reconocimiento de patrones.
Hemos realizado 6 predicciones baricéntricas en cada una de las ú[timas
100 observaciones de cada una de las series haciendo variar la dirnensión de
inmersión entre 3 y 8, manteniendo inalterado el número de puntos próximos en
^aa
t=srA[^i:^r^c_•A t:^;NAN()L.A
k= 10. Esto proporcionó un total de 5 grados de libertad con el fin de contrastar
el determinismo de cada observación.
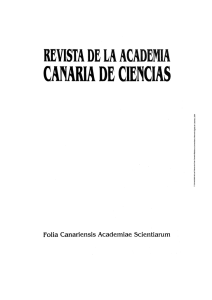
En !os gráficos 1, 2 y 3 mostramos la desviavión típica de los errores baricéntricos de predicción en todas las series. Nuestro contraste de hipótesis consiste en io siguiente: cuando dicha desviación típica está por debajo de 0.412
(1 + 1I10) a2 / 5, señalado por la línea horizontal, no rechazamos la hipótesis de
determinismo con un 99,5% de probabilidad; cuando dicha desviación típica
está comprendida entre 0.412 (1 +^/10) a 2/ 5 y 15.086 (1 + 1/10) a 2/ 5, aceptamos la hipótesis de variables aleatorias IID N(0, cs) con un 99,5% de probabi(idad (a representa la desviacián típica de las series y en el eje de abscisas se
representan las unidades de tiempo).
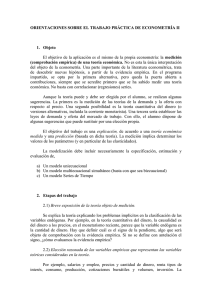
En las gráficas podemos ver tambián que hay algunos segmentos de la serie
de parados (gráf'rco 1) y de las rentabilidades bursátiles (gráfico 2) en !os que es
posible hacer predicciones a corto plazo con alguna precisián. Tales segmentos
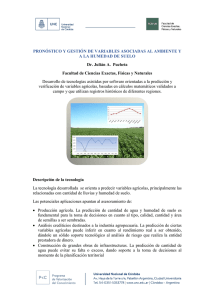
coexisten con la presencia de Zonas turbulentas donde las predicciones son imposibles, ya que cualquier obediencia con comportamiento análogo en el pasado se rompe. Los últimos cien datos de la serie de agregados monetarios Divisia
(gráfico 3) son predecibles con la excepción de tres pequeñas zonas turbulentas.
Gráf^co 1
SERIE DE PARAD4S
0.^6
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
540
560
580
600
s2o
640
660
UltiTtNC'!(.)N l:NTKt- (.'A()ti ^" AI.AR 4^N SI:F21^^^ RUf1x;1SAS
Gráfico 2
SERIE DE RENTABILIDADES BURSATILES
x 10_5
9
.
1
1
0^
1280
^
t
1300
1
1320
^
1340
^
1 ^-
'
1360
1
I
13$0
1400
800
820
Gráfico 3
SERIE DE AGREGADOS MONETARIOS
x 10-g
4
3.5
3
2.5
2
1.5
1
r
^
0.5
0
700
720
740
760
780
^^n2
fi.
FSTAC)tSTlt'A t^:`+PANf)l.,A
CiJNCLUSI^JNES
Los tests de Grassberger y Procaccia (1983} y de 8rock, Dechet y Scheinkman contrastan, en una serie temporal en su conjunto, la hipótesis de ruido
blanco frente a la hipótesis alternativa de caos determinista. En el test que hemas descrito en este trabajo se contrasta la existencia de estructuras patencialmente predecibles, observacián por observación. La impredecibilidad de una abservacián de la serie a partir de las restantes reveia independencia de la variable aleatoria que la genera respecto a las restantes y, por tanto, ruido blanca; la
predecibilidad revela determinismo no lineal y, por tanto, caos.
En este sentido, nuestros tests aplicados sobre las tres series arrojan las siguientes conclusiones:
Con el tamaño muestral disponible, no puede establecerse que la serie de
parados de Sayers (gráfico 1) ni la de rentabilidades bursátiles de Scheinkman y
LeBaron {gráfica 2} sean predecibles por ocurrencias análogas: en este sentida
no puede afirmarse de ninguna de ellas que sean caóticas y que sus observacianes estén generadas por un proceso determinista no lineal.
Según muestra el gr^fico 3, la serie del índice monetario Divisia DM2 es predecible por ocurrencias análogas excepto en tres pequeños segmentos. En este
sentido, el objetivo inicíal de contrastar que dicha serie está generada por un
proceso determinista caótico sólo se alcanza parcialmente.
Siguiendo los gráficos 1 y 2, la hipótesis de compartamíento determinista
debe ser rechazada para tas series de parados y rentabilidades bursátiles. No
obstante, el gráfico 1 muestra zonas de observaciones consecutivas de la serie
de parados que resultan predecibles alternadas con otras zonas de naturaleza
turbulenta e impredecible.
REFERENCIAS
BAJO, C7.; ^ERNÁNDE2, F., y SOSVILLA, S. (1992a}: «Chaotic behavior in exchangerate series: First results for the peseta-U.S. dollar case», Economics Letters,
vol. 39, 207-211.
(1992b): «Volatilidad y predecibilidad en las series del tipo de cambio peseta-dálar: un enfoque basado en el caos determinista», Revista Española de
Economía, vol. 9, n.Q 3, 91-199.
BAJO, O.; FERNÁNDEZ, F.; M(3RA, A., y SOSVILLA, S. (1994): «Un análisis comparado de volatilidad para los indices bursátiles de Madrid y Nueva Yark», Revista de Economía Aplicada, n.4 4(vol. II), 177-186.
[)IS"flNt'I()N !:N`"1"Rt•: C`At)!^ Y AIAft f-:N ^f:klf:ti Rl'[[.X)^AS
303
BARNETT, W., y CHEN, P. (1988): «The Aggregation Theoretic Monetary Aggregates are Chaotic and have Strange Attractors» , en Dynamic Econometrics
Modeling, Proceedings of the Third International Symposium on Economic
Theory and Econometrics, W. Barnet y H. White (eds.), Cambridge University Press.
BROCK, W. A.; DECHERT, W. D., y Scheinkman, J. (1987): A Test for lndependence based on the Correlatíon Dimensian, Department of Economics, University of Wisconsin, Madison, University of Houston and University of Chicago.
BROCK, W. A.; HsIEH, D. A., y LEBARON, B(1992) : Nonlr'near Dynarnics, Chaos
and lnstability, MIT Press.
CHEN, P. (1992): «Searching for Economic Chaos: A Challenge to Econometric
Practice and Nonlinear Tests», en Nonlinear Dynamics and Evolutionary
Economics, R. Day y P. Chen (eds.), ^xford University Press.
FARMER, J. D., y SIDOROWICH, J. (1987): «Predicting Chaotic Time Series», Phys.
Rev. Lett., 59, 845-848.
-- (1988): «Exploting Chaos to Predict the Future and Reduce Noise», en Evolution, Learning and Cognition, Y. C. Lee ( ed.), World Scientific Press.
FERNÁNDEZ, F. (1992): EI problema de la predicción en series tempora/es: aplicaciones del caos determinista, Tesis Doctoral, Departamento de Economía
Aplicada, Universidad de Las Pafmas de Gran Canaria.
GERSHENFELD, N. A., y WEIGEND, A. S. (1994): «The Future of Time Ser'res: Learning and Understanding», en Time Series Prediction: Forecasting the Future
and Understanding the Past, A. S. Weigend y N. A. Gershenfeld (eds.), Addison-Wesley.
GRASSBERGER, P., y PROCACCIA, I. (1983): «Characteriiation af Strange Attractors», Phys. Rev. Lett., vof. 50, n.Q 5, 346-394.
LORENZ, H. (1993): Nonlinear Dynamica/ Economics and Chaotic Motion, Springer-Verlag.
MEDIO, A. (1992): Chaotic Dynamics: Theory and Applications to Economics,
Cambridge University Press.
PROVENZALE, A.; SMITH, L. A.; VIO, R., y MURANTE, G. (1992): «Distinguishing between low-dimensional dynamics and randomness. In measured time series»,
Physica, 58D, 361-372.
RAMSEY, J.; SAYERS, C., y ROTHMAN, P. (1990): «The Statistical Properties of Dimension Calculations using small data sets: some economic applications»,
lnternatíona/ Economic Review, vol. 31, n.Q 4, 991-1020.
SAYERS, C. L. (1986): «Work Stoppages: Exploring the Nonlinear Dynamics», rnimeo, Departrnent of Economics, University of Houston.
E'S"TAl)ItiT1('A E'.tiF'.^Nf)l.A
SCHEINKMAN, ,^. A., y I..EBARON, B. (^ 9H9): «Nonlinear Dynamics and Stock Returns», Journa/ of Business, C2, 311-337.
SCHUSTER, H. G. (1988): Deterministic Chaos. An Introduction, VCH Weinheim.
SUGIHARA, G., y MAY, R. (1990): «Nonlinear forecasting as a way of distinguishing
chaos fram measurement error in time series», Nature, voi. 344, 735-741.
TAKENS, F. (1981): <^Detecting strange attractors in turbulence», en Lect. Notes
Math. 898, D. A. Raud y L. S. Young (eds.), Springar-Verlag.
DISTINGUISHING BETWEEN CHAOS VERSUS RANDOMNESS
IN NOISY SERIES BY LOCAL BARYCENTRIC PREDICTIONS
SUMMARY
In this paper ihe authors test for the presence of deterministic
chaos in séveral noisy econornic time series, by analyzing their
short-term forecasting possibilities based on lacal barycentric predictions. Some statistics are developed in order t0 separate zones of
deterministic and random behavior.
Key words: deterrninistic chaos, predictions.
AMS C/assification: 62P20, 90A20, 62M 10.
^
REVISTA ESTADISTICA ESPANCILA
INFORMACION PARA LOS AUTORES
Envío de originales
Los originaies deben enviarse al Director de la Revista, INE, Paseo de la Castellana,
183. 28071 Madrid. Deben estar redactados en castellano y no haber sido publicados o
estar en proceso de publicación en otro lugar. Se enviarán 4 copias del trabajo y la
revista acusará siempre su recibo.
PRESENTACION DE LOS MIANUSCRITOS
Estructura
La primera página debe incluir exclusivamente el título del articulo y el nombre,
dirección completa y teléfono del autor. En el caso de varios autores se indicará a quién
debe dirigirse la correspondencia. La segunda página contendrá únicamente el titulo y
resumen del trabajo de un máximo de 100 palabras, seguida de 3 a 6 palabras clave y la
clasificación AMS del artículo. EI texto del artículo comenzará en la tercera página y las
secciones se numerarán consecutivamente. La última página del original contendrá en
inglés el título del artículo, un resumen del rnismo bajo el epígrafe Summary y las
palabras clave. EI manuscrito debe mecanografiarse a doble espacio. Cuando el título
del artículo contenga más de 80 caracteres, se deberá indicar un título alternativo de
dicha longitud o menor.
Gráficos
Todos los diagramas o gráficos se numerarán sucesivamente y se indicará su posición
en el texto con el nombre de fi^ura. Se colocarán al final del manuscrito y deberán ser de
la calidad necesaria para su reproduccibn.
Referencia
EI sistema de referencia a seguir es el oficial del International Statistical Institute. Los
autores se citarán en el texto por su nombre, seguido de la fecha de publícación;
ejemplo: Box (1986), y las referencias se situarán en orden alfabético al final del texto,
como sigue:
a)
b)
Libros: Weisberg, S. (1985}. Applied Linear Regression, New YorK: V^/iley.
Artícu/os: Mahalanobis, P. c. (1950). Why Statistics? Sankhya, 10, 195-228.
c) Trabajos en obras colectívas: Box, G. E. P. (1983). An Apology for Ecurnenism in
Statistics. Scieniific Inference, Data Analysis and Robutsness, Ed. C. E. P., Leonard, T. y Wu,
C. F., pp. 51-84. New York: Academic-Press.
Evaluación de los originales
Los originafes serán sometidos a un proceso de evaluación garantizando el anonimato tanto del autar como de los evaluadores. EI objetivo de la revista es que el autor
reciba información sobre el resultádo de^ la evaluación en un plazo máximo de tres
meses.
Pruebas y separatas
Aceptado el artículo y antes de su publicación definitiva, el autor o autores recibirá 2
juegos de pruebas para correcciones, uno de los cuales deberá devolver corregido a la
Revista en un plazo de una semana desde su recepción. Una vez publicado, recibirá 25
separatas de su trabajo. Los posibles costes de impresión derivados de cualquier modificación de la versión final aceptada del manuscrito o de retraso en la corrección de
pruebas serán a cargo del autor o autores del mismo.