El Perceptrón Simple
Anuncio

4
El Perceptrón Simple
______________________________________________________________________
4.1 Introducción
Una de las características más significativas de las redes neuronales es su capacidad
para aprender a partir de alguna fuente de información interactuando con su entorno. En
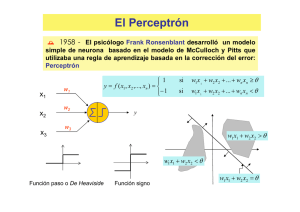
1958 el psicólogo Frank Ronsenblant desarrolló un modelo simple de neurona basado
en el modelo de McCulloch y Pitts y en una regla de aprendizaje basada en la corrección
del error. A este modelo le llamó Perceptrón. Una de las características que más interés
despertó de este modelo fue su capacidad de aprender a reconocer patrones. El
Perceptrón está constituido por un conjunto de sensores de entrada que reciben los
patrones de entrada a reconocer o clasificar y una neurona de salida que se ocupa de
clasificar a los patrones de entrada en dos clases, según que la salida de la misma sea 1
(activada) o 0 (desactivada). Sin embargo, dicho modelo tenía muchas limitaciones,
como por ejemplo, no es capaz de aprender la función lógica XOR. Tuvieron que pasar
unos años hasta que se propusiera la regla de aprendizaje de retropropagación del error
para demostrarse que el Perceptrón multicapa es un aproximador universal.
4.2 El Perceptrón simple
Supongamos que tenemos una función f de Rn en {-1,1}, que aplica un patrón de
entrada x = (x1,x2,…,xn)T ∈ Rn en la salida deseada z ∈ {-1,1}, es decir, f(x) = z. La
información de que disponemos sobre dicha función viene dada por p pares de patrones
de entrenamiento
{x1,z1}, {x2,z2},…,{ xp,zp}
donde xi∈Rn y f (xi) = zi∈{-1,1}, i=1,2,…,p. Dicha función realiza una partición en el
espacio Rn de patrones de entrada; por una parte estarían los patrones con salida +1 y
por otra parte los patrones con salida −1. Por lo tanto, diremos que la función f clasifica
a los patrones de entrada en dos clases. Ejemplos de funciones f de este tipo son la
función lógica OR o la función par.
Ahora vamos a construir un dispositivo sencillo que aprenda dicha función a partir de
un conjunto conocido de patrones (relaciones) de entrenamiento. Para ello vamos a
utilizar una unidad de proceso bipolar que como vimos es una función matemática con
dominio el conjunto n-dimensional {-1,1}n y rango el conjunto {-1,1}, definida por la
siguiente expresión:
si w1 x 1 + w2 x2 + ... + wn xn ≥ θ
⎧⎪ 1
f ( x1 , x2 ,..., xn ) = ⎨
(1)
si w1 x 1 + w2 x2 + ... + wn xn < θ
⎪⎩− 1
donde los parámetros w1,w2,…,wn, se llaman pesos sinápticos y son los pesos con los
que se ponderan los valores de entrada x1,x2,…,xn, o argumentos de la función; la suma
ponderada u = w1 x1 + w2 x 2 + ... + wn x n se llama potencial sináptico y el parámetro θ
se llama umbral o sesgo. También se puede expresar la función f mediante la función
signo, es decir,
f ( x1 , x 2 ,..., x n ) = sgn(u − θ )
siendo la función signo,
x≥0
⎧ 1
sgn(x) = ⎨
x<0
⎩− 1
y diremos que en este caso la función de transferencia es la función signo.
Análogamente, se define una unidad de proceso binaria como una función matemática
con dominio el conjunto n-dimensional {0,1}n y rango el conjunto {0,1}, definida por
la siguiente expresión:
si w1 x1 + w2 x2 + ... + wn xn ≥ θ
⎧⎪1
y = f ( x1 , x2 ,..., xn ) = ⎨
(2)
si w1 x 1 + w2 x2 + ... + wn xn < θ
⎪⎩0
x1
x2
y
x3
Figura 1. Unidad de proceso bipolar.
Cuando la salida de la unidad de proceso es igual a 1 se dice que dicha unidad de
proceso está activada o encendida y presenta el estado 1, mientras que si su salida es
igual a cero se dice que está desactivada o apagada, presentando el estado 0.
Función signo
f(x)
1
x
-1
Función paso o
De Heaviside
f(x)
1
0
x
Figura 2. Funciones de transferencia.
72
Para la determinación de los pesos sinápticos y del umbral vamos a seguir un proceso
adaptativo que consiste en comenzar con unos valores iniciales aleatorios e ir
modificándolos iterativamente cuando la salida de la unidad no coincide con la salida
deseada. La regla que vamos a seguir para modificar los pesos sinápticos se conoce con
el nombre de regla de aprendizaje del Perceptrón simple y viene dada por la
expresión:
w j (k +1) = w j (k ) + ∆w j (k ) , k = 1,2,…
siendo
∆w j (k ) = η (k )[z (k ) − y (k )]x j (k )
(3)
esto nos indica que la variación del peso wj es proporcional al producto del error
z (k ) − y (k ) por la componente j-ésima del patrón de entrada que hemos introducido en
la iteración k, es decir, x j (k ) . La constante de proporcionalidad η(k) es un parámetro
positivo que se llama tasa de aprendizaje puesto que cuanto mayor es más se modifica
el peso sináptico y viceversa. Es decir, es el parámetro que controla el proceso de
aprendizaje. Cuando es muy pequeño la red aprende poco a poco. Cuando se toma
constante en todas las iteraciones, η (k ) = η > 0 tendremos la regla de adaptación con
incremento fijo.
Cuando la función de transferencia usada es la función signo (valores bipolares) la
regla de aprendizaje se puede escribir de la forma:
⎧w j (k ) + 2ηx j (k )
⎪
w j (k + 1) = ⎨w j (k )
⎪
⎩w j (k ) − 2ηx j (k )
si y (k ) = −1 y z (k ) = 1,
si y (k ) = z (k )
(4)
si y (k ) = 1 y z (k ) = −1
Por lo tanto, esta regla de aprendizaje es un método de detección del error y corrección.
Solo aprende, es decir, modifica los pesos, cuando se equivoca. Cuando tenemos un
patrón que pertenece a la primera clase (z(k)=1) y no es asignado a la misma, entonces
corrige el valor del peso sináptico añadiéndole una cantidad proporcional al valor de
entrada, es decir lo refuerza, mientras que si el patrón de entrada no pertenece a esta
clase y el Perceptrón lo asigna a ella, lo que hace es debilitar el peso restándole una
cantidad proporcional al patrón de entrada . No modificaremos los pesos cuando el valor
deseado coincida con la salida de la red.
¿Cómo se modifica el sesgo? De la misma manera, teniendo en cuenta que el sesgo
se puede considerar como el peso sináptico correspondiente a un nuevo sensor de
entrada que tiene siempre una entrada igual a xn+1=−1, y como peso sináptico el valor
del umbral, pues
w1 x1 + w2 x2 + ... + wn xn ≥ θ
⇔
w1 x1 + w2 x2 + ... + wn xn + wn +1 xn +1 ≥ 0
cuando wn+1=θ y xn+1= −1. Así, la red equivalente tendría n+1 sensores, su umbral
sería siempre cero, los patrones de entrada ( x1 , x 2 ,..., x n ) serán ahora ( x1 , x 2 ,..., x n ,−1 ),
los pesos asociados ( w1 , w2 ,..., wn ) serán ( w1 , w2 ,..., wn , wn +1 ) con wn +1 = θ y la regla de
aprendizaje:
73
∆θ (k ) = −η (k )[z (k ) − y (k )] , k=1,2,…
(5)
A partir de ahora vamos a considerar el umbral como un peso sináptico más.
A continuación resumimos el algoritmo en el que actualizamos el vector de pesos
sinápticos para cada patrón de entrada (entrenamiento individualizado)
Algoritmo de aprendizaje del Perceptrón con entrenamiento individualizado
Paso 0: Inicialización
Inicializar los pesos sinápticos con números aleatorios del
intervalo [-1,1]. Ir al paso 1 con k=1
Paso 1: (k-ésima iteración)
Calcular
⎛ n +1
⎞
y ( k ) = sgn ⎜⎜ ∑ w j x j (k ) ⎟⎟
⎝ j =1
⎠
Paso 2: Corrección de los pesos sinápticos
Si z(k)≠y(k) modificar los pesos sinápticos según la
expresión:
w j (k + 1) = w j (k ) + η [z (k ) − y (k )]x j (k ) , j = 1,2,..., n + 1
Paso 3: Parada
Si no se han modificado los pesos en las últimas p
iteraciones, es decir,
w j (r ) = w j (k ), j = 1,2,..., n + 1, r = k + 1,..., k + p ,
parar. La red se ha estabilizado.
En otro caso, ir al Paso 1 con k=k+1.
Ahora surge la cuestión: ¿Dado un conjunto de patrones de entrenamiento, puede el
Perceptrón aprender a clasificarlos correctamente? Solamente si los patrones son
linealmente separables. Ello reduce considerablemente el campo de aplicaciones del
Perceptrón simple puesto que ni siquiera es capaz de implementar la función lógica
XOR dada por la siguiente relación:
Entradas
Salidas
(1, 1)
−1
(1, −1)
1
(−1, 1)
1
(−1,−1) −1
como se puede comprobar en la figura 3(a). En cambio, se pueden clasificar
correctamente los patrones cuando se utiliza una función no lineal (figura 3(b)).
74
(a)
(b)
Figura 3.(a) Patrones separables linealmente. (b) Patrones no separables linealmente.
Decimos que dos conjuntos de puntos A y B son linealmente separables en un espacio
n-dimensional si existen n+1 números reales w1 , w2 ,..., wn , θ , de manera que cada punto
(x1 , x2 ,..., xn ) ∈ A satisface ∑ w x ≥ θ y cada punto (x1 , x2 ,..., xn ) ∈ B satisface
∑ w x < θ . A continuación vamos a estudiar la convergencia del Perceptrón simple,
n
i =1
i
i
n
i =1
i
i
es decir, bajo que condiciones un Perceptrón es capaz de encontrar una solución en un
número finito de iteraciones.
w1x1+w2x2≥θ
w1x1+w2x2<θ
w1x1+w2x2=θ
Figura 4. Semiespacios que define el Perceptrón.
Teorema 1 (de convergencia del Perceptrón)
Si el conjunto de patrones de entrenamiento,
{x1,z1}, {x2,z2},…,{ xp,zp},
es linealmente separable entonces el Perceptrón simple encuentra una solución en un
número finito de iteraciones, es decir, consigue que la salida de la red coincida con la
salida deseada para cada uno de los patrones de entrenamiento.
Demostración:
75
En efecto, como los patrones son linealmente separables existirán unos valores
w1* , w2* ,..., wn*+1 tales que
n
∑w x
j =1
j
> wn∗+1 para los patrones de la clase 1 y
j
< wn∗+1 para los patrones de la clase 2.
*
j
n
∑w x
j =1
*
j
Obsérvese que wn+1 es el umbral θ.
Supongamos que en la iteración k la red tiene que modificar los pesos sinápticos según
la regla de aprendizaje, puesto que la salida de la red y(k) no coincide con la salida
deseada z(k). Tendremos que:
∑ (w (k + 1) − w ) = ∑ (w (k ) + η [z (k ) − y(k )]x (k ) − w )
n +1
j =1
* 2
j
j
n +1
j
j =1
* 2
j
j
Desarrollando,
n +1
(
= ∑ w j (k ) − w*j
)
2
+ η 2 [z (k ) − y (k )]
2
j =1
n +1
∑ x (k )
j =1
n +1
2
j
(
+
)
+ 2η [z (k ) − y (k )]∑ w j (k ) − w*j x j (k )
(6)
j =1
n +1
(
= ∑ w j (k ) − w*j
)
2
+ η 2 [z (k ) − y (k )]
2
j =1
n +1
∑ x (k )
j =1
2
j
+
n +1
n +1
j =1
j =1
+ 2η [z (k ) − y (k )](∑ w j (k ) x j (k )) −2η [z (k ) − y (k )]∑ w*j x j (k )
n +1
Obsérvese que [z (k ) − y (k )]∑ w j (k ) x j (k ) < 0, puesto que si
j =1
n +1
∑w
j =1
j
(k ) x j (k ) > 0 entonces
n +1
y(k)=1 y como la salida es incorrecta tiene que ser z(k)=−1; y si
∑ w (k ) x (k ) < 0
j =1
j
j
entonces y(k)=−1, y como la salida es incorrecta, z(k)=1. Dicho término se puede
escribir de la forma:
n +1
− 2 ∑ w j (k )x j (k )
j =1
Asimismo, el término
n +1
[z (k ) − y(k )]∑ w*j x j (k ) > 0
j =1
n +1
es positivo puesto que si
∑ w x (k ) > 0 entonces la salida deseada es z(k)=1 y la salida
j =1
*
j
j
n +1
incorrecta de la red tiene que ser y(k)=−1, y si
∑ w x (k ) < 0
j =1
*
j
j
entonces z(k)=−1 y la
salida incorrecta de la red tiene que ser y(k)=1. Así, también se puede escribir de la
forma:
76
n +1
2 ∑ w*j x j (k )
j =1
Por lo tanto tenemos que
∑ (w (k + 1) − w ) ≤ ∑ (w (k ) − w )
n +1
* 2
j
j
j =1
n +1
j =1
* 2
j
j
n +1
n +1
+ 4η 2 ∑ x j (k ) − 4η ∑ w*j x j (k )
2
j =1
(7)
j =1
puesto que hemos prescindido de un término negativo en la derecha de la expresión.
n +1
(
D(k + 1) = ∑ w j (k + 1) − w*j
Sea
)
2
j =1
n +1
(
D(k ) = ∑ w j (k ) − w*j
)
2
j =1
⎪⎧ n +1
⎪⎫
T = min ⎨ ∑ w*j x j ( k ) ⎬
1≤ k ≤ p
⎪⎩ j =1
⎭⎪
n +1
Como
∑ x ( k ) =n + 1,
j =1
2
j
de la expresión (7) se deduce la siguiente desigualdad:
D ( k + 1) ≤ D ( k ) + 4η 2 (n + 1) − 4ηT
D ( k + 1) ≤ D ( k ) + 4η [η (n + 1) − T ]
Si tomamos η (n + 1) − T < 0 , es decir,
η<
T
n +1
T
n +1
hace que D(k) disminuya al menos en la cantidad constante 4η[η (n + 1) − T ] en cada
iteración (con corrección). Si el número de iteraciones con corrección fuese infinito
entonces llegaríamos al absurdo de alcanzar en un momento determinado un valor
negativo para el término D(k) que evidentemente no puede ser negativo. La siguiente cuestión que vamos a abordar es estudiar cuál sería el mejor valor que
debemos elegir del parámetro de aprendizaje η de forma que se consiga más
rápidamente la convergencia de la red. Se trata de elegir η de manera que D(k+1) sea lo
menor posible y así conseguir un mayor acercamiento de los pesos de la red a la
solución. Como D(k+1) es una función cuadrática del parámetro η solo tenemos que
derivar e igualar a cero para encontrar el valor de dicho parámetro que corresponde al
mínimo de la expresión D(k+1).
entonces D(k+1)<D(k). Esto significa que eligiendo un valor de η tal que 0< η <
n +1
n +1
n +1
j =1
j =1
E (η ) = D(k + 1) = D(k ) + 4η 2 ∑ x j (k ) − 4η ∑ w j (k )x j (k ) − 4η ∑ w*j x j (k )
j =1
2
77
n +1
n +1
n +1
∂E (η )
2
= 8η ∑ x j (k ) − 4 ∑ w j (k )x j (k ) − 4 ∑ w*j x j (k ) = 0
∂η
j =1
j =1
j =1
El valor de η que verifica dicha ecuación es
n +1
ηopt =
∑ wj ( k ) x j ( k ) +
j =1
n +1
∑ w x (k )
*
j
j =1
j
2(n + 1)
Sin embargo el segundo término del numerador no lo conocemos puesto que no
conocemos los valores w *j . Si aproximamos dicho término por el anterior tenemos que
un valor aproximado de la tasa de aprendizaje óptima es el siguiente:
n +1
ηopt =
∑ w (k ) x (k )
j
j =1
j
n +1
Como hemos visto anteriormente,
n +1
n +1
j =1
j =1
− 2 ∑ w j (k ) x j (k ) = [z (k ) − y (k )]∑ w j (k ) x j (k )
y así
n +1
ηopt =
− [ z (k ) − y (k ) ] ∑ w j ( k ) x j ( k )
j =1
2(n + 1)
Sustituyendo este valor del parámetro η en la regla de aprendizaje (cuando y(k)≠z(k))
obtenemos,
n +1
w j (k + 1) = w j ( k ) −
⎡⎣ z ( k ) − y ( k ) ⎤⎦ ∑ w j ( k ) x j ( k )
j =1
2(n + 1)
⎡⎣ z ( k ) − y ( k ) ⎤⎦ x j ( k )
es decir,
n +1
w j (k + 1) = w j ( k ) − 2
∑ w (k ) x (k )
j =1
j
j
n +1
xj (k )
(7)
puesto que [z(k)−y(k)]2 = 4 cuando y(k)≠z(k).
Dicha regla se conoce con el nombre de regla del Perceptrón normalizada, pues si
partimos de un vector de pesos normalizado, es decir, w (k ) = 1, entonces todos los
78
pesos que se van obteniendo según la regla de aprendizaje se mantienen normalizados.
En efecto,
n +1
w (k + 1) = ∑ w j (k + 1) 2
2
j =1
2
n +1
⎛ n +1
⎞
(
)
(
)
w
k
x
k
w j (k ) x j (k ) n +1
⎜
⎟
∑
∑
j
j
n +1
n +1
j =1
j =1
2
2⎜
⎟
− 4 n +1
w j (k ) x j (k )
= ∑ w j (k ) + ∑ x j ( k ) 2 n +1
∑
⎜
⎟
2
2
j =1
i =1
j =1
x
k
x
k
(
)
(
)
⎜
⎟
∑
∑
j
j
j =1
j =1
⎝
⎠
n +1
= ∑ w j (k ) 2 = 1
j =1
4.3 Deducción de la regla de aprendizaje del Perceptrón a partir de un
criterio
Supongamos que disponemos del conjunto de entrenamiento constituido por p1 patrones
de la clase 1 (que representaremos por C1) y por p2 de la clase 2 (que representaremos
por C2) y que ambas clases son separables linealmente. Hemos visto que con el
Perceptrón simple se pretende encontrar un vector de pesos sinápticos w = (w1,
w2,…,wn+1)T que verifique:
n +1
wT x = ∑ w j x j ≥ 0 ,
∀x ∈ C1
j =1
n +1
wT x = ∑ w j x j < 0 ,
∀x ∈ C2
j =1
Con ello se consigue que la salida de la red, y, coincida con la salida deseada, z, es
decir,
y = sgn(w T x) = z , ∀x ∈ C1 ∪ C 2
Para entender bien la regla del Perceptrón debemos de conocer el criterio elegido para
su deducción. Si el vector de pesos sinápticos está normalizado entonces la distancia de
un vector x0 al hiperplano de separación (llamado frontera de decisión), w T x = 0 , viene
dada por la expresión w T x 0 , puesto que el producto escalar de los vectores w y x0−x
nos da la longitud de la proyección del vector x0−x sobre el vector w (normalizado),
con signo positivo o negativo dependiendo si el punto x0 está por encima o por debajo
del hiperplano (ver la figura 5). Es decir, dicha distancia viene dada por la expresión
w T ( x 0 − x) = w T x 0 puesto que w T x = 0 . Si no estuviera normalizado el vector w
entonces dicha distancia sería
w
w
T
( x 0 − x) =
w
w
T
x0 =
1
w T x 0 , es decir,
w
proporcionar a w T x 0 .
79
x0
wTx=0
w
x
Figura 5. Distancia de un punto al hiperplano frontera.
El criterio para deducir la regla de aprendizaje del Perceptrón consiste en minimizar la
distancia total al hiperplano de separación de los puntos clasificados incorrectamente
por el Perceptrón, es decir, minimizar la función
D (w (k )) = −∑ z (k ) ⎡⎣ w (k )T x(k ) ⎤⎦
k∈I
donde I es el conjunto de patrones de entrenamiento clasificados incorrectamente,
I = {k ∈ {1, 2,..., p} : z (k ) = 1 y w (k )T x( k ) < 0 ó z ( k ) = −1 y w ( k )T x( k ) ≥ 0} .
Para ello podemos utilizar el método del descenso del gradiente donde la dirección de
búsqueda viene dada por la dirección del gradiente pero en sentido opuesto:
∆w(k ) = −η
∂D(w(k ))
∂w(k )
⎧−η z (k )x(k )
=⎨
⎩0
si k ∈ I
si k ∉ I
Se puede observar que dicha regla es la regla del Perceptrón definida en (3) puesto que
y(k)= −z(k) para k∈I.
En caso de modificar los pesos sinápticos solamente después de haber introducido todos
los patrones del conjunto de entrenamiento y evaluar sus salidas se tiene que
∆w = −η
∂D(w)
∂w
⎪⎧−η ∑ z (k )x(k ) si k ∈ I
= ⎨ k∈I
⎪⎩0
si k ∉ I
ya que en este caso w no depende de k. La regla obtenida es la regla de aprendizaje por
lotes del Perceptrón simple.
4.4 Interpretación de la regla de aprendizaje del Perceptrón
Supongamos que en la regla de aprendizaje (4) utilizamos una tasa de aprendizaje es η
= 0.5. Dicha regla se puede escribir también de la manera siguiente:
80
⎧w (k ) + a(k ) si (a(k ))T w (k ) ≤ 0
w (k + 1) = ⎨
en otro caso
⎩w ( k )
(8)
⎧ x(k ) si z (k ) = 1
donde a(k) = ⎨
⎩− x(k ) si z (k ) = −1
Nos indica que se realizan las correcciones siempre y cuando se producen
clasificaciones incorrectas, es decir, si
(9)
(a( k ))T w ( k ) ≤ 0
Una interpretación geométrica de la regla de aprendizaje (8) se muestra en la figura 6.
Vemos como el vector de pesos sinápticos w(k) se mueve directamente hacia el
hiperplano (incluso lo cruza), (a(k))T w(k) = 0, cuando se le suma el vector a(k). Así,
se mueve el vector de pesos sinápticos w(k) en una dirección que busca el incremento
de la cantidad (a(k))T w(k) tratando de conseguir que sea positiva y así la clasificación
es correcta.
a(k)
w(k+1)
a(k)
w(k)
+
−
Figura 6. Variación del vector de pesos sinápticos
en la regla de aprendizaje del Perceptrón
Por lo tanto, la regla de aprendizaje del Perceptrón intenta encontrar una solución w*
para el siguiente sistema de desigualdades:
a( k ) T w > 0 , k = 1, 2,…, p1+ p2
(una desigualdad por cada patrón).
Este planteamiento nos lleva a establecer un criterio para deducir la regla de
aprendizaje del Perceptrón. Se trata de obtener un procedimiento para minimizar la
siguiente función criterio:
J ( w ) = − ∑ a( k ) T w
(10)
k∈I ( w )
donde I(w) es el conjunto de patrones clasificados incorrectamente utilizando el vector
de pesos sinápticos w (es decir, (a(k))T w ≤ 0). Así, J nunca es negativo y si dicho
conjunto es vacío entonces J alcanza su valor mínimo, J = 0.
Desde el punto de vista geométrico, J(w) es proporcional a la suma de las distancias
de las muestras clasificadas incorrectamente a la frontera de decisión (hiperplano).
Cuanto menor sea J(w) mejor será el vector de pesos sinápticos w.
81
Un procedimiento para minimizar dicha función criterio viene dado por el método del
descenso del gradiente, es decir, como la componente j del gradiente de J es ∂J / ∂w j ,
entonces de la expresión (10) se tiene que el gradiente de J(w) es:
∇J =
∑ (−a(k ))
k∈I ( w )
Así, la regla de actualización basada en el descenso del gradiente, que consiste en
desplazarse en la dirección opuesta al gradiente con una longitud del paso regulada por
el parámetro η(k), viene dada por la siguiente expresión:
w (k + 1) = w (k ) − η (k )∇J
= w ( k ) + η ( k ) ∑ a( k )
k∈I ( w )
Aquí actualizamos el vector de pesos sinápticos después de evaluar las salidas de la red
para todos los patrones de entrenamiento. Por ello, se llama algoritmo del Perceptrón
con entrenamiento por lotes, que resumimos a continuación:
Algoritmo de aprendizaje del Perceptrón con entrenamiento por lotes
Paso 0: Inicialización
Inicializar los pesos sinápticos con números aleatorios del
intervalo [-1,1]. Fijar un valor de parada s. Ir al paso 1 con k=1
Paso 1: (k-ésima iteración) Corrección de los pesos sinápticos
w (k + 1) = w (k ) + η (k )
∑ a( k )
k∈I ( w )
Paso 2: Parada
Si η (k )
∑ a(k ) < s parar.
k∈I ( w )
En otro caso, ir al Paso 1 con k=k+1.
En este algoritmo se puede modificar la tasa de aprendizaje η(·) en cada iteración.
Cuando η(·) se mantiene constante en todas las iteraciones se dice que la regla es de
incremento fijo.
Si actualizamos el vector de pesos sinápticos en cada iteración (entrenamiento
individualizado) entonces tendríamos que
w (k + 1) = w (k ) + η (k )a(k )
cuando el patrón introducido en la iteración k resulta clasificado incorrectamente, y
w (k + 1) = w (k )
en caso contrario. Resulta así la regla de aprendizaje del Perceptrón con entrenamiento
individualizado estudiada al comienzo del tema.
82
4.5 Modificaciones: El algoritmo del Perceptrón con bolsillo
Consiste en tener en cuenta el número de iteraciones consecutivas del algoritmo de
Perceptrón en las cuales no se ha modificado el vector de pesos sinápticos (para cada
uno de los vectores que va generando), es decir, tener en cuenta el número de patrones
que se han clasificado correctamente con dicho vector hasta que se ha encontrado el
primer patrón que clasifica incorrectamente. Se tiene “guardado en el bolsillo” la mejor
solución explorada, es decir, el vector de pesos sinápticos generado que ha conseguido,
hasta el momento, el mayor número de iteraciones sin ser modificado. Cuando se
encuentra un nuevo vector de pesos sinápticos que consigue un mayor número de
clasificaciones correctas consecutivas que el que hay en el bolsillo entonces el vector
del bolsillo se reemplaza por este. La solución final viene dada por el vector de pesos
sinápticos guardado en el bolsillo. Así, el objetivo de esta modificación es encontrar un
vector de pesos sinápticos que maximice el número de clasificaciones correctas. Como
los patrones de entrenamiento se presentan a la red de manera aleatoria y el conjunto de
patrones es finito, entonces la red puede encontrar un vector de pesos sinápticos óptimo
con alta probabilidad. Aunque este algoritmo no garantiza una solución óptima pero la
evidencia empírica nos muestra que conduce a buenos resultados.
Para evitar que la mala suerte nos pueda llevar a un vector de pesos sinápticos que
sea una mala solución se puede hacer otra nueva modificación. Consiste en reemplazar
el vector de pesos sinápticos que hay en el bolsillo por aquel que tenga una racha mayor
de clasificaciones correctas y que además clasifica correctamente a un mayor número de
patrones del conjunto completo de los p patrones de entrenamiento. Esta modificación
es mas costosa computacionalmente por lo que se suele usar sólo en la fase final del
entrenamiento.
4.6 Implementación de la función lógica OR mediante un Perceptrón
Supongamos que deseamos saber si una paloma es capaz de aprender la manera de
conseguir la comida. Para ello, se colocan dos pulsadores, uno al lado del otro y cada
pulsador puede estar encendido o apagado. Para conseguir la comida tiene que picar en
cualquiera de los pulsadores, salvo cuando los dos están apagados que debe picar
solamente en el pulsador derecho (figura 7). ¿Aprenderá la paloma a picar siempre en el
pulsador adecuado para conseguir la comida? El Perceptrón simple puede hacerlo.
Para ello vamos a representar el problema mediante un vector bipolar (x1,x2,x3),
donde x1 toma el valor 1 ó –1 según que el pulsador de la izquierda esté encendido o no,
respectivamente; x2 toma el valor 1 ó –1 según que el pulsador de la derecha esté
encendido o no, y x3 toma el valor 1 ó –1 según que la paloma pique en el pulsador de la
izquierda o en el de la derecha, respectivamente. Por lo tanto, el problema se reduce a
un problema de clasificación, donde las entradas
(1 1 –1), (1 –1 –1), (–1 1 –1), (1 1
1), (1 –1 1), (–1 1
1), (–1 –1 –1)
conducen a un éxito (y = 1), y la entrada
(–1 –1 1)
a un fracaso (y = –1).
El Perceptrón aprenderá esta regla mediante entrenamiento, es decir, introduciendo
varias veces en la red el conjunto de patrones de entrada y modificando los pesos
sinápticos según la regla de aprendizaje. Así, el Perceptrón de la figura 8 conduce
siempre a una salida correcta, es decir, ha aprendido dicha regla.
83
Figura 7. Experimento para el aprendizaje.
w1 = 0.8
θ = -2.1
w2 = 0.9
w3 = -0.9
Figura 8. Pesos sinápticos y umbral del Perceptrón.
Ahora modificamos el experimento de manera que para conseguir la comida tiene que
picar en el pulsador de la derecha, salvo cuando los dos están apagados, en cuyo caso
tiene que picar en el pulsador de la izquierda. ¿Podrá una paloma aprender esta regla? El
Perceptrón simple no. El problema se reduce a un problema de clasificación, donde las
entradas
(1 1 –1), (1 –1 –1), (–1 1 –1), (–1 –1 1)
conducen a un éxito (y=1), y las entradas
(1 1
1), (1 –1 1), (–1 1
1), (–1 –1 –1)
a un fracaso (y=–1).
(–1 –1 1)
(–1 1 1)
(1 –1 1)
(1 1 1)
(–1 –1 –1)
(1 –1 –1)
(–1 1 –1)
(1 1 –1)
Figura 9. Los vértices del cubo como patrones de entrenamiento.
84
En la figura 9 se puede observar como los patrones de entrenamiento son los vértices de
un cubo; los vértices que representamos por los círculos rellenos de negro se
corresponden con acierto mientras que los restantes con fracaso. Como estos vértices no
se pueden separar linealmente de los restantes, el Perceptrón simple no puede aprender
dicha regla o función lógica. Sin embargo, como veremos en el siguiente capítulo, si
utilizamos dos capas de neuronas artificiales podemos implementar cualquier función
Booleana, y, por lo tanto, dicha función.
4.7 La ADALINA
Otro modelo clásico de redes neuronales es la ADALINA (también llamada
ADALINE), pues corresponde al acrónimo de ADAptive Linear NEuron) o neurona con
adaptación lineal que fue introducida por Widrow en 1959. Esta neurona es similar al
Perceptrón simple pero utiliza como función de transferencia la función identidad en
lugar de la función signo. La salida de la ADALINA es simplemente una función lineal
de las entradas (ponderadas con los pesos sinápticos):
n
y = ∑ wj x j −θ
j =1
Obsérvese que ahora la salida de la red es continua en lugar de binaria.
Si consideramos una entrada adicional con valor xn+1= −1 cuyo peso sináptico wn+1=θ,
entonces podemos escribir simplemente
n +1
y = ∑ wj x j
j =1
Así, de forma general podemos tratar el valor umbral θ como un peso sináptico
adicional con entrada igual a −1.
Con la ADALINA se pretende implementar la correspondencia entre las entradas y
las salidas de un sistema utilizando un conjunto finito de relaciones entre entradas y
salidas. Supongamos que disponemos de p patrones de entrada x 1 , x 2 ,..., x p y sus
correspondientes salidas deseadas z 1 , z 2 ,..., z p . Se trata de determinar los pesos
sinápticos que consiguen que las salidas de la red sean lo más parecidas a las salidas
deseadas para el conjunto dado de patrones de entrenamiento. Es decir, se trata de
determinar los pesos sinápticos de manera que se minimice la función de error
cuadrático siguiente:
{
{
}
n +1
2
⎞
1 p
1 p ⎛
E = ∑ ( z k − y ( k ) ) = ∑ ⎜ z k − ∑ w j (k ) x kj ⎟
2 k =1
2 k =1 ⎝
j =1
⎠
}
2
Para ello vamos a seguir el método de descenso del gradiente, es decir, en la misma
dirección y en sentido opuesto al gradiente. Si en la iteración k hemos introducido el
patrón de entrenamiento xk, cuya salida deseada es zk, y los pesos sinápticos son wj(k),
j=1,2,…,n, entonces la modificación de los mismos motivada por dicho patrón es:
wr (k + 1) = wr (k ) + ∆wr (k ) ,
donde
∆wr (k ) = −η
∂E
∂wr (k )
85
[
]
= η z k − y (k ) x rk , j = r, 2,…, n+1
(11)
El parámetro η controla la longitud del paso que vamos a dar en la dirección opuesta del
gradiente. Conforme mayor sea η mayor será la cantidad por la que se modificarán los
pesos sinápticos. Dicho parámetro debe ser un valor pequeño para evitar dar pasos
demasiado largos, es decir, que nos lleven a soluciones peores que la que teníamos,
puesto que el método del gradiente solamente garantiza el decrecimiento de la función
de error si nos desplazamos en la direcciones opuesta del gradiente pero en un entorno
suficientemente pequeño. A η lo llamaremos parámetro de aprendizaje o tasa de
aprendizaje.
En el proceso de entrenamiento hemos introducido un patrón en cada iteración, por
ello diremos que hemos realizado un aprendizaje en línea. También podemos
introducir los p patrones directamente y comparar las salidas de la red con las salidas
deseadas, pasando entonces a actualizar los pesos sinápticos, en cuyo caso diremos que
el aprendizaje es por lotes. La modificación de los pesos sinápticos se hace tomando
como función de error el error medio (se divide por p el error total), es decir,
2
1 p k
1 p ⎛ k n +1
k ⎞
E=
z
y
k
−
=
(
)
(
)
⎜ z − ∑ wj x j ⎟
∑
∑
2 p k =1
2 p k =1 ⎝
j =1
⎠
y así la regla de aprendizaje es
∆w j = −η
=η
2
∂E
∂w j
[
]
1 p k
z − y (k ) x kj
∑
p k =1
(12)
Obsérvese que aquí el peso sináptico no depende del patrón introducido, es el mismo
para los p patrones puesto que se actualiza conjuntamente según el error medio para los
p patrones.
4.8 Neuronas con salida continua: Regla de aprendizaje de WidrowHoff
Vamos a considerar unidades de proceso con salidas continuas. Una unidad de proceso
continua es aquella cuya salida viene dada por la siguiente expresión:
⎛ n +1
⎞
y = g ⎜ ∑ wj x j ⎟
⎝ j =1
⎠
donde x = ( x1 , x2 ,..., xn ) ∈ ℜn en la entrada de la unidad, w = ( w1 , w2 ,..., wn ) ∈ ℜn es
'
'
el vector de pesos sinápticos y g es la función de transferencia. La función de
transferencia va a ser una función diferenciable y no decreciente, y vamos a elegir,
como función de transferencia, a una de las siguientes funciones:
a) La función logística
86
g (x ) ≡
1
1 + exp(− 2 βx )
cuya representación gráfica se muestra en la figura 10. Es una función de aplastamiento
puesto que pasa los valores del potencial sináptico, que son del intervalo (−∞, ∞), al
intervalo [0, 1].
Figura 10. Funciones logísticas.
El parámetro de ganancia β controla la pendiente de la curva, es decir, cuanto mayor es
β la curva tiene más pendiente y se aproxima más a la función escalón.
Se utiliza dicha función como función de transferencia puesto que su derivada, que
después vamos a utilizar en la regla de aprendizaje, es muy simple,
g ' ( x ) = 2 βg ( x )[1 − g ( x )] , es decir, es una función de la propia función.
b) La función tangente hiperbólica,
g ( x ) = tanh (βx ) =
e β x − e−β x
e β x + e −β x
cuya representación gráfica se muestra en la figura 11. Es una función de aplastamiento
puesto que pasa los valores del potencial sináptico al intervalo [-1, 1].
Figura 11. Funciones tangentes hiperbólicas.
También se utiliza dicha función como función de transferencia puesto que su derivada
2
es muy simple, g ' ( x ) = β 1 − g ( x ) , es decir, es también una función de la propia
función. Asimismo, cuanto mayor es el parámetro de ganancia β mayor es la pendiente
de la curva y más se asemeja a la función signo.
[
]
c) La función identidad, g(x)=x.
n +1
A la cantidad
h = ∑ wj x j
se le llama potencial sináptico. En la figura 12
j =1
representamos gráficamente una unidad de proceso continua.
87
w1
x1
w2
x2
x3
y
w3
Figura 12. Neurona analógica.
Con esta unidad de proceso continua se pretende implementar la correspondencia entre
las entradas y las salidas de un sistema, utilizando un conjunto finito de relaciones entre
entradas y salidas. Supongamos que disponemos de p patrones de entrada x 1 , x 2 ,..., x p
y sus correspondientes salidas deseadas z 1 , z 2 ,..., z p . Se trata de determinar los pesos
sinápticos que consiguen que las salidas de la red sean lo más parecidas a las salidas
deseadas para el conjunto dado de los patrones de entrenamiento. Es decir, se trata de
determinar los pesos sinápticos de manera que se minimice la función de error
cuadrático siguiente:
{
{
}
}
2
n +1
⎞
2
1 p
1 p ⎛
E = ∑ ( z k − y ( k ) ) = ∑ ⎜ z k − g (∑ w j (k ) x kj ) ⎟
2 k =1
2 k =1 ⎝
j =1
⎠
El método de descenso del gradiente (desplazar los pesos en sentido opuesto a la
dirección del gradiente) nos conduce a la siguiente regla de aprendizaje, conocida con el
nombre de regla de Widrow-Hoff, regla de mínimos cuadrados medios o regla LMS
(Least Mean Squares):
∂E
∆w j (k ) = −η
∂w j (k )
[
]
= η z k − y (k ) g ' (h )x kj ,
j=1,2,…,n+1
donde h es el potencial sináptico.
En el caso de aprendizaje por lotes, tomaremos como función de error cuadrático
medio
n +1
⎞
2
1 p k
1 p ⎛ k
E=
z
y
k
z
g
w j x kj ) ⎟
−
=
−
(
(
)
(
)
⎜
∑
∑
∑
2 p k =1
2 p k =1 ⎝
j =1
⎠
y así,
∆w j = −η
=η
2
∂E
∂w j
[
]
1 p k
z − y (k ) g ' (h) x kj
∑
p k =1
(13)
88