diseño y construcción de una mesa giratoria automática para
Anuncio

DISEÑO Y CONSTRUCCIÓN DE UNA MESA GIRATORIA AUTOMÁTICA
PARA MEDICIÓN DE PATRÓN POLAR
SHYMMY W. GARCIA BUSTOS
UNIVERSIDAD DE SAN BUENABENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA DE SONIDO
BOGOTÁ D.C.
2009
DISEÑO Y CONSTRUCCIÓN DE UNA MESA GIRATORIA AUTOMÁTICA
PARA MEDICIÓN DE PATRÓN POLAR
SHYMMY W. GARCIA BUSTOS
PROYECTO DE GRADO
UNIVERSIDAD DE SAN BUENABENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA DE SONIDO
BOGOTÁ D.C.
2009
Nota de aceptación:
_________________________________
_________________________________
_________________________________
_________________________________
_________________________________
_________________________________
_________________________________
Firma del presidente del jurado
_________________________________
Firma del jurado
_________________________________
Firma del jurado
DEDICATORIA
Este trabajo está dedicado a quien amo con todo mi corazón, quien a
través de todos estos años de estudio siempre estuvo a mi lado
ayudándome, enseñándome y permitiéndome alcanzar paso a paso cada
logro en mi vida, a Él y solo a Él, a mi DIOS ¡Muchas Gracias!.
A mis padres por todo su esfuerzo y sacrificio durante estos años de
estudio por creer en mí y apoyarme en lo que fue este gran reto. ¡ LOS
AMO!
Agradecimientos
Un profundo agradecimiento a Dios por permitirme terminar este trabajo y
lograr el objetivo propuesto al iniciar está carrera. También por colocar en
mi camino personas que de forma directa o indirecta ayudaron a que este
proyecto fuese una realidad.
A los ingenieros Holbein Castillo y Jamis Garzón por sus consejos y
colaboración en el desarrollo de este proyecto.
Al ingeniero Miguel Pérez, por su gran ayuda, sus asesorías en el área de
la electrónica.
A Jaime Andrés Vanegas por su tiempo, sus consejos y su ayuda
incondicional.
A Diego Fernando Hidalgo y William Posada porque sin su colaboración
hubiese sido difícil el cumplimiento de los objetivos.
Al profesor Luis Jorge Herrera por su paciencia.
A todos los que participaron de una forma u otra muchas gracias.
CONTENIDO
Pag
INTRODUCCIÓN…………………………………………………………...…...1
1. PLANTEAMIENTO DEL PROBLEMA………………………………...……3
1.1 Antecedentes…………………………………………………………...…..3
1.2 Descripción Y Formulación Del Problema……………………..…….….8
1.3 Justificación……………………………………………………..………….8
1.4 Objetivos De La Investigación………………………………..……….….9
1.4.1 Objetivo General………………………………………………………....9
1.4.2 Objetivos Específicos…………………………………………………....9
1.5 Alcances Y Limitaciones Del Proyecto…………………………………9
1.5.1 Alcances…………………………..……………………………………..9
1.5.2 Limitaciones………………………………………………...……………10
2. MARCO DE REFERENCIA………………………………………..……...10
2.1 MARCO TEÓRICO - CONCEPTUAL…………………………………...10
2.1.1 Frecuencia………………………………………..……………………...10
2.1.2 Periodo……………………………………………..…………………….10
2.1.3 Longitud de onda………………………………………………………..11
2.1.4 Ondas sonoras………………………………………………..…………11
2.1.5 Presión sonora……………………………………………..……………12
2.1.6 Decibel………………………………………………….……….…….….12
2.1.7 Filtros De Ponderación……………………………………….………..13
2.1.8 Nivel de Presión sonora……………………………………………….15
2.1.9 Altoparlantes…………………………………………………………..…15
2.1.9.1Respuesta en frecuencia………………………………………….…16
2.1.9.2 Potencia………………………………………………………………..16
2.1.9.3 Impedancia……………………………………………….….………...19
2.1.9.4 Sensibilidad…………………………………………………………....19
2.1.9.5 Rendimiento…………………………………………………………...20
2.1.9.6 Distorsión……………………………………………….………….….20
2.1.10 Directividad de altoparlantes………………………….……….……..20
2.1.10.1 Omnidireccional.……………………………………………….…...21
2.1.10.2 Bidireccional.………………………………………………….…….22
2.1.10.3 Unidireccionales……………………………………………… ..…...24
2.1.11 Factor Q………………………………………………………….……..23
2.1.12 Índice de directividad………………………………………….……..23
2.1.13 Tipos de Altavoces………………………………………..…………..23
2.1.14 Driver de compresión………………………………………...………..25
2.1.15 Protocolos de comunicación…………………………………..…....26
2.1.15.1 Puerto serie………………………………………….…….………..26
2.1.15.2 Puerto paralelo………………………………………….……..…...28
2.1.16 Micro-controlador………………………………………….…….……31
2.1.17 Los PICS……………………………………………….……..………..33
2.1.17.2 PICs usados comúnmente…………………………….….…….…34
2.1.17.3 Programación del PIC……….………………………..…….………35
2.1.18 Motor eléctrico…………………………………………………..……..37
2.1.19 Motores de paso……………………………………………………….38
2.1.20 Motores de corriente continúa………………………….……………39
2.1.21 Introducción de reductores y motorreductores…………….………39
2.1.22 Reductores y Motorreductores………………..……………………..40
3. METODOLOGÍA…………………………………………..………………..42
3.1 Enfoque De La Investigación…………………………………..……....42
3.2 Línea De Investigación De Usb / Sub-Línea De Facultad / Campo
Temático Del Programa………………………………………………………42
3.3 Técnicas De Recolección De Información……………………………..43
3.4 Hipótesis………………………………………………………………..….46
3.5 Variables………………………………………..…………….……………47
3.5.1 Variables Independientes…………………………..………..………47
3.5.2 Variables Dependientes………………..……………………..………51
4. DESARROLLO INGENIERIL………………………………….……..……48
4.1 Etapa mecánica……………………………………….………………….48
4.1.1 Despiece del sistema mecánico…………………….………………..50
4.1.1.1 Base…………………………………….……………………………..50
4.1.1.2 Rodamiento principal…………………………………….……..…….51
4.1.1.3 Superficie Giratoria………………………………………………...…52
4.1.1.4 Rodamientos de soporte para la superficie giratoria………...……53
4.1.1.5 Soporte Motor……………………………………………….….……..54
4.1.1.6 Base para elementos electrónicos……………………..…….…..…55
4.1.1.7 Motor…………………………………………………………………...57
4.2 Etapa de electrónica……………………………………….…….…….....58
4.2.1 Circuito de control……………………………………….…….…….…59
4.2.2 Circuito de potencia………………………………….………………....65
4.3 Etapa de programación…………………………………..…………..…..68
4.3.1 Programación del PIC16f877A……………………..…………..……..68
4.3.2 Programación en matlab……………………………………….………70
4.3.2.1 Calibración de la mesa (sistema mecánico)……………………....70
4.3.2.2 Calibración de audio………………………………………………....71
4.3.2.3 Segunda parte: Toma y análisis de datos. ……..………..……….73
5. PRESENTACIÓN Y ANÁLISIS DE RESULTADOS………….……..….75
5.1 Medición Por El Método Tradicional………………………………...…..77
5.1.1 Montaje……………………………………………………………..……77
5.1.2 Diagrama De Conexiones……………………………………………...79
5.1.3 Resultados………………………….……………………………………80
5.2 Mediciones utilizando la mesa giratoria automática…………………...81
5.2.1 Montaje…………………………………………………………..………82
5.2.2 Diagrama de conexiones………………………………………..……..82
5.2.3 Resultados………………………………………………………..……...85
5.3 Mediciones Cada Grado………………………………………….……...87
5.4 Consideraciones………………………………………………….…….…89
6. CONCLUSIONES……………………….………………………….…..…..91
7. RECOMENDACIONES……………………………..………………...……93
BIBLIOGRAFÍA………………………………………………………………..94
ANEXOS……………………………………………………………………......95
LISTA DE FIGURAS
PAG
Figura1. Patrón polar en esfera de un parlante………………….………….4
Figura 2. Sistema de mesa giratoria de OUTLINE.....................................6
Figura 3. Electronically Turntable, sistema completo, conformado por la
mesa giratoria, la interfaz y el software que controla el sistema………..….6
Figura 4. Turntable System Type 9640, desarrollado por Brüel & Kjaer….7
Figura 5. Curvas de ponderación de filtros A, B C………………………...14
Figura 6. Diagrama polar omnidireccional……………………......……......21
Figura 7. Diagrama polar bidireccional…………………..………….………22
Figura 8. Diagrama polar cardioide………………………..………………..23
Figura 9. Conector DB9 Serial……………………………..………………..26
Figura 10. Un puerto paralelo de impresora en la parte trasera de un
portátil Compaq N150………………………...………………………...……..29
Figura 11. Microcontrolador Motorola 68HC11 y chips de soporte………31
Figura 12. Esquema de un micro-controlador……………………...………32
Figura 13. Microcontrolador PIC…………………………………………….33
Figura 14. Sonómetro Svantek, Modelo: 943ª………………….………….43
Figura 15. Micrófono de medición BECM8000…………………..………..44
Figura 16. Tarjeta de audio MAUDIO, Fast Track Pro……………………45
Figura 17- Sistema mecánico………………………………………………..49
Figura 18-19. Sistema mecánico…………………………………………….50
Figura 20. Plano Base………………………………………………………...50
Figuras 21- 22. Diseño de la base del sistema mecánico………………..51
Figura 23. Plano del rodamiento principal…………………….…………....51
Figura 24. Diseño del rodamiento principal………………………………...52
Figura 25. Plano de la superficie giratoria………………………….……....52
Figura 26-27. Superficie giratoria en plano abierto y en detalle………….53
Figura 28. Plano de la base y el rodamiento de soporte de la superficie
giratoria……………………………………………………………………..…..53
Figura 29-30. Diseño de los rodamientos de soporte y su ubicación en la
base del sistema……………………………………………………………….54
Figura 31. Plano del soporte del motor……………………………….…….54
Figura 32-33. Elemento cilíndrico donde se ubica el motor. Rieles de
ubicación del motor en el eje horizontal……………………………………..55
Figura 34. Acople del sistema de soporte del motor…………………..…..55
Figura 35. Plano de base para elementos electrónicos………….…….…56
Figura 36-37. Diseño de base para elementos electrónicos. Ubicación en
la base principal del sistema……………………………………………….....56
Figura 38-39. Plano del motorreductor. Diseño del motorreductor………57
Figura 40. Circuito integrado Max 232………………………………..…….60
Figura 41. Especificación de los pines y construcción del circuito
integrado Max 232……………………………………………..……………...61
Figura 42. Microcontrolador PIC16f877A…………………………………...62
Figura 43. Especificación de los pines del microcontrolador
PIC16f877A………………………………………………………………..……62
Figura 44. Optoacoplador de herradura………….……………………..….65
Figura 45-46. Optoacoplador encapsulado MCT6. Diseño típico con
optoacoplador…………………………………………………………………..66
Figura 47. Amplificador operacional Tip31C…………………………..…...66
Figura 48. Plano del circuito electrónico utilizado en la interfaz de
comunicación……………………………….………………………..…………67
Figura 49. Interfaz grafica de calibración del sistema……………………..73
Figura 50. Interfaz grafica de realización de la medición……………...….74
Figura 51. Sistema mecánico………………………………………..………75
Figura 52. Sistema de movimiento del motor………………………..……..75
Figura 53. Rodamientos De soporte…………………………………...…...76
Figura 54. Sistema de conteo de grados por optoacoplador de
herradura...................................................................................................76
Figura 55. Diagrama de conexiones del método
tradicional………………………………………………………………….……79
Figura 56. Diagrama polar resultante de las mediciones por el método
tradicional………………………………………………………………..……...81
Figura 57. Diagrama de conexiones por el método de sistema de mesa
giratoria automática…………………………………………………..………..82
Figura 58. Montaje del sistema……………………………………….……..83
Figura 59. Método de calibración por medio del pistófono………..……...83
Figura 60. Resultado en la calibración del sistema para realización de las
mediciones……………………………………………………………....……..84
Figura 61. Montaje dispuesto para la realización de las mediciones…....84
Figura 62. Resultado en la interfaz gráfica luego de realizar las
mediciones cada 10 grados………………………………………………….85
Figura 63. Grafica polar resultante de las mediciones realizadas cada 10
grados………………………………………………………………..…………86
Figura 64. Grafica polar resultante de las mediciones por el método de
mesa giratoria automática disminuyendo la escala………………………..87
Figura 65. Interfaz principal en mediciones de resolución 1º…………….88
Figura 66. Grafica de matlab resultante de las mediciones con resolución
1º………………………………………………………………………………..88
Figura 67. Grafica patrón polar en Excel con los datos obtenidos en la
medición de 1º………………………………………………………………….89
LISTA DE TABLAS
Tabla1. Niveles de voltaje TTL y RS232……………………………….…...60
Tabla 2. Resultados de las mediciones de ruido de fondo, realizadas con
el sonómetro……………………………………………….............................79
Tabla 3. Resultados de la medición del patrón polar por medio del método
tradicional…………………………………………………………………….....80
Tabla 4. Resultados de la medición del patrón polar por medio del método
de mesa giratoria automática……………………………………………..85-86
LISTA DE ANEXOS
ANEXO A
Características Del Pic 16F877A…………………………………………….96
ANEXO B
Descripción de los pines del microcontrolador PIC 16F877A………...97-99
ANEXO C
Código de programación del microcontrolador PIC16f877a…........ 100-101
ANEXO D
Código de programación de la interfaz grafica de usuario desarrollada en
matlab para la etapa de calibración………………………………….. 102-107
ANEXO E
Código de programación de la interfaz grafica de usuario desarrollada en
matlab para la etapa toma y análisis de datos…………………….. 108-116
ANEXO F
Tabla de datos de los valores obtenidos en matlab para la medición de
los 360º con resolución de 1º…………………………………………117-119
INTRODUCCIÓN
¿Qué es una mesa giratoria automática? ¿Para qué sirve? y ¿Cómo se
usa?, son las primeras preguntas que surgen al leer o escuchar el titulo
de este proyecto, por eso como primera medida se procede a explicar de
manera global de que se trata y a qué se refiere.
Una mesa giratoria automática, es un dispositivo mecánico formado por
una superficie plana de forma circular que gira sobre su propio eje, sobre
esta se coloca un altoparlante, también conocido como bafle o cabina,
con el fin de medir su patrón polar. Funciona mediante un motor que hace
girar dicha superficie con el altoparlante encima de ella. Mientras que un
dispositivo de captura, toma los niveles de presión sonora de este y los
almacena para su posterior representación gráfica.
El patrón polar de los alto parlante o bafles, se utiliza para conocer los
parámetros de radiación sonora que estos poseen, dichos parámetros
tiene gran aplicación a la hora de escoger y utilizar uno u otro sistema de
sonido,
dependiendo obviamente de las
necesidades
y
de las
características de dichos sistemas.
En el presente documento se encuentra la información, tanto teórica como
práctica, necesaria para el diseño y la construcción de dicha mesa, esta
teoría está enfocada desde el punto de vista ingenieril, más precisamente
desde la ingeniería de sonido, centrándose en lo que a un ingeniero de
sonido le interesa más, esto significa que aunque son necesarias
aplicaciones mecánicas, electrónicas y de programación, el objetivo no se
centra en un análisis detallado del sistema mecánico (torques, fuerzas,
velocidad de giro) o en un detallado análisis de la electrónica utilizada y
aunque se muestra el diseño realizado los parámetros de dichos diseños
no son más que meramente nombrados.
Por otro lado, aunque no es un proyecto de ingeniería de sistemas o de
programación en sí, la programación del software de adquisición de datos
1
del SPL (sound presión level) cobra mayor importancia pués es esto lo
verdaderamente relevante a la hora de analizar los resultados finales,
esto sin olvidar que el sistema es un todo y cada parte complementa y
hace parte de la otra, tanto la mecánica como la electrónica y la
programación.
El desarrollo de este proyecto está claramente dividido en tres partes
como se ha venido mencionando, mecánica, electrónica y programación,
cada una de ellas mencionando su funcionamiento y aporte al todo del
sistema.
El diseño y la construcción de una mesa giratoria automática busca
facilitar
el trabajo y la precisión en dichas mediciones, mediante un
software donde el usuario pueda determinar el número de grados que
avanza y el número de mediciones en cada punto, esto con el fin de
obtener una medida más precisa.
2
1. PLANTEAMIENTO DEL PROBLEMA
1.1 Antecedentes
Las mediciones de directividad de parlantes son tan antiguas como los
parlantes mismos, compañías especializadas en el diseño y construcción
de estos realizan las pruebas de directividad de sus productos en sus
laboratorios especializados.
Existen varias formas de medir el patrón polar de un bafle, el denominado
tradicional y el profesional, que se realiza en su mayoría por las mismas
compañías fabricantes o por empresas especializadas en acústica y
medición de altavoces.
El sistema de medición, denominado tradicional, se realiza con un
sonómetro o un decibelímetro dejando la fuente estática y la persona que
realiza la medición debe realizar el movimiento alrededor del altavoz.
Es importante hacer notar que este método tiene grandes desventajas
pues debido al continuo movimiento de los sistemas de medición los
errores sistemáticos aumentan notablemente esto sin mencionar que al
estar la persona detrás del instrumento de medición produce una gran
absorción del sonido radiado por la fuente, lo que influye en el resultado
de las mediciones. Además quienes realizan este tipo de medición no
siempre cuentan con una cámara anecóica (con cero reverberación), lo
que implica un aumento en los errores pues existe más probabilidad de un
aumento en el ruido de ambiente.
Las mediciones de directividad o patrón polar de altavoces realizadas
profesionalmente
se
realizan
en
cámaras
anecóicas
mediante
dispositivos altamente sofisticados que entregan datos muy precisos de
los altavoces. La forma en que se desarrollan estas mediciones es, a
grandes rasgos, así: se coloca un micrófono a una distancia práctica de la
3
fuente (normalmente alrededor de 4 metros), y se gira el altavoz para
conseguir los diferentes ángulos.
Normalmente esta rotación se realiza alrededor de un eje, de forma que
se necesita un pase diferente para cada corte esférico, es decir, que se
necesitados pases para sacar curvas polares horizontales y verticales
(que corresponderían al ecuador y un meridiano de la esfera).
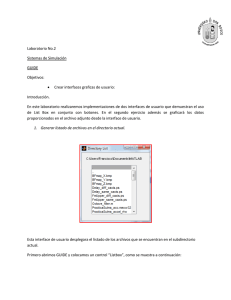
Figura1. Patrón polar en esfera de un parlante 1
El resultado final es una respuesta en frecuencia para cada punto de la
esfera de medida, con resolución que puede variar de 1/24 de octava a
1/3 de octava, con una resolución angular que está entre 1 y 10 grados.
La Figura 2 contiene un conjunto de estas representaciones respuestas
en frecuencia para el corte horizontal, que se representa como un gráfico
de cascada (en inglés, waterfall). Estos datos de alta resolución muestran
la transición desde una respuesta plana en el eje (enfrente de la caja) a
una respuesta dominada por los bajos fuera del eje (detrás de la caja).
Pueden visualizarse los puntos de medida como el "ecuador" de la esfera.
Empresas como DAS audio, desarrollaron un sistema de medición de
directividad llamado plataforma AUTOPOL de alta resolución, que aún
1
Fuente: Directividad de altavoces. Terminología y representaciones José Brusi
4
hoy en día es uno de los sistemas de medida más avanzados del mundo,
ofreciendo una resolución angular de 2 grados y 1/24 de octava en
frecuencia. AUTOPOL se encarga de automatizar las medidas y su postprocesado, haciendo posible la publicación en hojas técnicas de
información muy detallada con respecto a la directividad de los altavoces.
Sin embargo estos sistemas de medición de gran desarrollo tecnológico
tienen su desventaja y es que son sistemas y software de propietario, por
lo que no se tiene acceso a estos. Por esta razón diferentes empresas
desarrollaron sistemas de medición accesibles (en teoría, puesto que son
sistemas bastante costosos) a usuarios interesados en realizar sus
propias mediciones.
La empresa Outline es un fabricante italiano de altavoces de alta gama
para concierto y la industria. Dentro de su catalogo de productos ofrecen
un sistema de rotación automático
altavoces. Su
para medición de patrón polar de
sistema conocido como System “E.T” (Electronically
Turntable) es un sistema desarrollado para medir patron polar en 2 o 3
dimensiones segun las necesidades del cliente.
Este sistema cuenta con una plataforma que soporta hasta 1500 kg. Max
y con una resolución de 0.01 grados, por otra parte añadiendo un sistema
extra puede realizar mediciones en 3 dimensiones
haciendo de este
sistema uno de los más avanzados que se encuentra en el mercado.
5
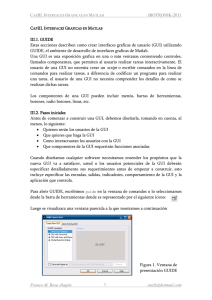
Figura 2. Sistema de mesa giratoria de OUTLINE 2
El sistema cuenta con una interfaz de control de la mesa que se
interconecta tanto con la mesa como con el pc. Este sistema cuenta a
demás con un software de manejo.
Figura 3. Electronically Turntable, sistema completo, conformado por la mesa giratoria, la interfaz y
el software que controla el sistema
2
Fuente: http://www.outline.it/ET2-ST2_Turntable.htm
3
IBID
6
3
Estas mediciones se presentan también en un solo plano x/y, siendo
igualmente validas y apreciables en las hojas técnicas de los altavoces,
esta forma de presentar los resultados de las mediciones se conoce como
diagrama polar de radiación.
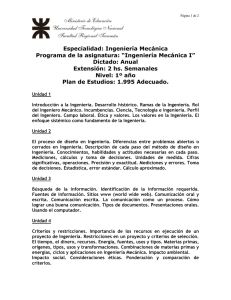
Empresas como Brüel & Kjaer, una compañía danesa especializada en
diseño de instrumentación para mediciones acústicas, desarrollo un
sistema de mesa giratoria llamado Turntable System Type 9640, que es
un sistema diseñado para medición de patrón polar. Turntable System
Type 9640, Es la unión de varios sistemas desarrollados por Brüel & Kjaer
consiste en una mesa giratoria Turntable Type 5960, un controlador
Turntable
Type 5997 y un control remoto WB 1254. Dicho sistema
consiste en una mesa giratoria controlada por mando a distancia está
diseñada para girar el objeto a medir que puede ser un altavoz o un
micrófono para medir la respuesta direccional. Este puede soportar hasta
100kg en su centro, tiene un movimiento de rotación continuo con una
resolución de 1 grado un diámetro de 354 mm y pesa solamente 12Kg.
Este sistema a diferencia del de DAS audio esta a la venta para que quien
lo requiera realice sus propias mediciones.
Figura 4. Turntable System Type 9640, desarrollado por Brüel & Kjaer 4
4
Fuente:
http://www.bksv.com/products/telecomaudiosolutions/electroacousticsaccessories/turntablesys
temtype9640.aspx
7
Local o nacionalmente no se han desarrollado sistemas de medición de
patrón polar de altavoces si no que se recurre a los métodos tradicionales
de medición.
1.2
DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
La medición de la directividad de los altoparlantes por el denominado
método tradicional resulta ser un proceso tedioso y muchas veces
inexacto debido a una serie de errores sistemáticos ocasionados por el
movimiento constante de los instrumentos de medición y la inexactitud en
la rotación al rededor de la fuente sonora.
Dichos errores como cambiar la distancia del instrumento de medición a la
fuente, o la ubicación respecto al eje de la fuente, incluso la ubicación de
la persona detrás del instrumento de medición, lo que genera absorción,
producen su efecto en los resultados de la medición, esto sin mencionar
que la resolución de movimiento es inexacta y no puede ser muy
pequeña.
¿Cómo construir un dispositivo capaz de facilitar las mediciones y
minimizar los errores producidos por el hombre, en el proceso de
medición del patrón polar de los parlantes?
1.3
JUSTIFICACIÓN
Con la construcción de la mesa giratoria se provee una herramienta
fundamental a la hora de medir la directividad de los altoparlantes,
disminuyendo en gran medida los errores sistemáticos que se pueden
generar por el movimiento y cambio de posición continuo de los
instrumentos de medida.
El diseño y construcción de una mesa giratoria automática permite
realizar mediciones de patrón polar de un altoparlante de manera práctica
y dinámica por medio de un software donde el usuario puede determinar
los parámetros fundamentales de una medición de directividad (numero
de grados de cada medición y tiempo de duración en cada punto).
8
1.4 OBJETIVOS DE LA INVESTIGACIÓN
1.4.1 Objetivo General
Diseñar y construir una mesa giratoria automática, con parámetros
ajustables, software de adquisición y manipulación para medición del
patrón polar de altavoces.
1.4.2 Objetivos Específicos
•
Elaborar un software que permita ingresar los parámetros
correspondientes a la posición y número de mediciones, que
capture, almacene y grafique los datos correspondientes al patrón
polar del altavoz.
•
Diseñar y construir la mesa giratoria automática.
•
Diseñar e implementar una interface
de comunicación entre la
mesa giratoria y el software de análisis.
•
Realizar las pruebas correspondientes a la verificación del correcto
funcionamiento de la mesa giratoria.
1.5
ALCANCES Y LIMITACIONES DEL PROYECTO
1.5.1 Alcances
Con el sistema de medición desarrollado en este proyecto se proporciona
una herramienta de mejora en las
mediciones de patrón polar de
altavoces, mejorando la eficiencia de dichas mediciones y disminuyendo
los errores sistemáticos producidos por el hombre en el desarrollo de las
mismas.
1.5.2 Limitaciones
El peso máximo soportado por el sistema mecánico.
El ángulo de giro mínimo del sistema debido al sistema mecánico
implementado.
9
2. MARCO DE REFERENCIA
2.1 MARCO TEÓRICO - CONCEPTUAL
El contenido de este capítulo es en esencia teórico, aquí se exponen los
conceptos fundamentales para el correcto entendimiento del proyecto.
Se iniciaran con los conceptos correspondientes a los altavoces,
mencionando los tipos existentes sus patrones de radiación, los
conceptos acústicos asociados a estos y finalmente los conceptos de la
parte mecánica seguidos por los usados en la parte
electrónica y
programación.
2.1.1 Frecuencia
Es un término empleado para indicar el número de oscilaciones que se
repiten un una unidad de tiempo para cualquier fenómeno periódico.
Según el sistema internacional, la unidad de medida de la frecuencia es el
Hertz (Hz), el cual se calcula mediante la contabilización de un número de
ocurrencias, teniendo en cuenta un intervalo temporal, luego estas
repeticiones se dividen por el tiempo transcurrido.
2.1.2 Periodo
Es el tiempo transcurrido en un periodo de frecuencia, es decir, es la
cantidad de tiempo medida entre dos puntos equivalentes de oscilación,
que así mismo es lo que emplea un suceso periódico en completar una
pulsación.
El periodo es recíproco a la frecuencia, siendo posible calcularlo de la
siguiente forma:
T=
1
f
10
2.1.3 Longitud de onda
Es la forma física mediante la cual es posible determinar el tamaño de
una onda. Físicamente, para ondas sinusoidales, es la distancia existente
entre dos puntos de valor máximo, cuyo estado de movimiento es
idéntico.
La longitud de onda se encuentra ligada con la frecuencia en forma
inversamente proporcional, y es posible determinar su valor sabiendo la
velocidad a través de la cual están viajando las ondas mediante la
siguiente ecuación:
λ=
c
f
Donde: λ es la longitud de onda, c es la velocidad de transmisión de la
onda en el medio y f es la frecuencia de la onda medida en Hertz.
2.1.4 Ondas sonoras
La onda sonora es un movimiento físico de tipo ondulatorio bajo el cual
existe un proceso de propagación de energía de un punto en el espacio a
otro sin haber transferencia de materia. Al momento en que las ondas de
un movimiento ondulatorio requieren un medio material para su
transportación, toman el nombre de ondas mecánicas.
Al corresponder las ondas sonoras al tipo de desplazamiento mecánico,
quiere decir que estas pueden viajar a través de cualquier medio material
mas no sin el. La velocidad con que esta se transporta se encuentra
directamente relacionada con las propiedades físicas del material en el
cual se desenvuelve.
Al ser el sonido una perturbación en el medio en el que se mueve quiere
decir que genera un desplazamiento molecular del material, donde las
partículas de este vibran produciendo cambios en la densidad y la presión
a lo largo de la dirección de movimiento de la onda, siendo esta la forma
en que las ondas se trasladan de un punto a otro.
11
2.1.5 Presión sonora
La presión sonora o también llamada presión acústica es producida por la
propagación de ondas sonoras en un medio. Dicha propagación, al
perturbar un medio estable, genera un cambio en la densidad de las
partículas en las cuales se propaga la onda, generando de esta forma
variaciones de presión y produciendo zonas done existe mayor
concentración de estas partículas y otras zonas con menor saturación,
denominándose a estas, zona de compresión y zona de rarefacción
respectivamente.
El caso más común que es posible encontrar para el ser humano es la
perturbación generada por una onda sonora en el aire, la cual ejerce un
cambio en la presión atmosférica cuya unidad es el Pascal (Pa),
produciendo en ella una variación instantánea tanto por encima como por
debajo de la presión atmosférica, generando a su vez zonas de
compresión y rarefacción en el medio. Dicho fenómeno actúa como un
estímulo para el sistema auditivo que en último término es traducido como
un sonido para el hombre.
2.1.6 Decibel
El decibel o también llamado decibelio es una unidad logarítmica para
expresar la relación entre dos magnitudes. Para casi todos los casos se
tiene una comparación entre una cantidad con otra llamada de referencia,
siendo siempre ambos valores de un mismo tipo.
El número de decibelios esta dado como diez veces el logaritmo en base
diez de la relación entre dos valores.
Las unidades de decibelios más utilizadas en sonido y acústica son:
dB FS. (FS = Full Scale, escala completa). Medida relativa de señal en la
que 0 dB es el valor RMS de una sinusoide cuyo pico positivo lleva al
valor digital máximo.
12
dB m. Medida absoluta de voltaje referida a 1 mW. Para una carga de 600
ohmios el voltaje es de 0,775 voltios, que coindice con el de los dB u. Este
tipo de unidad está hoy en día en desuso en el audio, ya que no interesa
la transferencia de potencia sino de voltaje.
dB SPL. Medida absoluta, en decibelios, de presión sonora referenciada a
20 micro pascales.
dB u. Medida absoluta, en decibelios, de voltaje referida a 0,775 voltios.
dB V. Medida absoluta, en decibelios, de voltaje referida a 1 voltio.
dB(A), dB(B), and dB(C)
Estos símbolos son usados para mostrar el uso de diferentes filtros de
ponderación diseñados para aproximar las mediciones a la respuesta del
oído humano
2.1.7 Filtros De Ponderación
La percepción del sonido por el oído humano es un fenómeno complejo,
que depende de la frecuencia y del nivel de presión sonora de la onda
sonora, no existiendo linealidad entre ambas variables.
Si los valores de presión acústica se miden linealmente, aun siendo cierta
dicha medida, tiene poco valor en cuanto a la percepción del oído
humano, puesto que el oído humano tiene una menor sensibilidad en las
frecuencias más graves, y en las más agudas frente a las medias. Por
tanto lo que más se oye son las frecuencias medias, y las que menos las
más graves seguidas de las más agudas.
Por eso es necesario encontrar una forma de ajustar los niveles de dB
medidos con la percepción que el oído tiene de los mismos según cada
frecuencia. Esta corrección se realiza ponderando los dB medidos
mediante una tabla de ponderación ya especificada y que se llama tabla
de ponderación “A". Los decibelios ya ponderados en "A" se representan
como dBA y los no ponderados, llamados lineales, como dB.
13
Por ejemplo si en una frecuencia de 100 Hz hemos medido 80 dB, al
ponderarlo pasaran a ser 60,9 dBA, esto quiere decir que un nivel de
presión sonora de 80 dB en una frecuencia de 100 Hz es oída por nuestro
sistema de audición como si realmente tuviese 60,9 dBA y no 80 dB.
Estas tablas de ponderación están especificadas en la Norma S1.4 de
ASA, y han quedado internacionalmente aceptadas a través de la ISO.
La escala A está pensada como atenuación al oído cuando soporta
niveles de presión sonora bajos (<55dB) a las distintas frecuencias. La
escala B representa la atenuación para niveles intermedios (55-85 dB) y
la C para altos (>85 dB). La D está pensada para muy altos niveles de
presión sonora.
El cálculo del filtro de ponderación A se puede ser descrito como una
función de frecuencia por la siguiente ecuación:
Figura 5. Curvas de ponderación de filtros A, B C
14
2.1.8 Nivel de Presión sonora
El nivel de presión sonora (SPL) es una forma de medir la variación de
presión en decibelios generada por una onda sonora, la cual se define por
la siguiente ecuación
2
SPL = 10 log10 p = 20 log10 p
p0
p0
Donde p se refiere al valor de presión instantáneo, medido en Pascales,
producido por la onda sonora que se desplaza en el medio y p0 es la
presión de referencia, la cual es en todos los casos tendrá un valor de 20
micropascales. Este valor de referencia describe en forma estándar al
umbral de percepción del oído humano.
El empleo del nivel de presión sonora es debido a que los valores de
presión que varían a lo largo de una perturbación sonora poseen cambios
demasiado grandes, lo cual dificulta su manejo. Al emplear un sistema
logarítmico la variación de las unidades se reduce de tal forma que su uso
es mucho más sencillo, además este tipo de unidad se asemeja mucho a
la forma mediante la cual el sistema auditivo interpreta las señales
sonoras que recibe del exterior.
2.1.9 Altoparlantes
Un altoparlante es un dispositivo transductor de tipo electro-mecanoacústico, es decir, se encarga de realizar la conversión de las señales de
audio a una onda que se propaga por el medio. Este procedimiento
consiste en dos etapas importantes, en la primera etapa convierte las
ondas eléctricas en energía mecánica, y en la segunda convierte la
energía mecánica en energía acústica.
15
Las principales características de los altoparlantes son:
2.1.9.1 Respuesta en frecuencia
La respuesta en frecuencia de un altoparlante se representa mediante
una curva que representa la variación de la presión sonora que esta
genera en función de la frecuencia, manteniendo siempre la señal de
entrada de tal forma que sea constante.
Los altavoces de alta calidad tienen un margen de variación de 6 dB para
el margen audible de los 20 Hz - 20 kHz.
Fuera de los sistemas de alta calidad, también son aceptables las
variaciones de 3 dB en un margen de 100 Hz a 15 KHz.
En las especificaciones técnicas suele venir la curva de respuesta en
frecuencia, pero se debe
tener en cuenta que los fabricantes
probablemente hayan hecho sus mediciones en las condiciones más
favorables, por lo que los resultados serán superiores a los reales.
2.1.9.2 Potencia
Hace referencia a la potencia eléctrica que entra en el altavoz (no a la
potencia acústica). Es la cantidad de energía (en vatios) que se puede
introducir en el altavoz antes de que distorsione en exceso o de que
pueda sufrir desperfectos. Dentro de la potencia se diferencia entre
potencia nominal y potencia admisible.
Potencia nominal: Potencia máxima, en régimen continuo, que puede
soportar el altavoz antes de deteriorarse. Si se hace trabajar al altavoz por
encima de esa potencia nominal se podrá dañar irremediablemente el
altavoz ya que éste no podrá disipar el calor producido por la corriente
eléctrica que circula por la bobina y ésta puede fundir el aislante que
recubre el hilo de cobre que la forma, provocando cortocircuitos o
cortándose la espalda por fusión del hilo de cobre.
16
La fórmula para obtener la potencia eléctrica de entrada necesaria es:
Donde:
P = potencia eléctrica
I = intensidad
Z = impedancia
Potencia media máxima o potencia de régimen:
Corresponde a la
potencia máxima que se puede aplicar al altavoz de forma continua.
Determina la potencia máxima que puede disipar la bobina (en forma de
calor) sin que ésta se queme por exceso de temperatura. A veces se
encuentra como Potencia RMS, pero esto es incorrecto, pues el apelativo
RMS solo tiene sentido para voltajes y corrientes, no para potencias.
Potencia de pico máximo o potencia admisible:
Potencia máxima
impulsiva (un pico de señal), que puede soportar cada cierto tiempo el
altavoz antes de deteriorarse. Corresponde al valor máximo instantáneo
de potencia que puede aplicarse durante un tiempo muy corto. Este valor
está muy relacionado con otra limitación de los altavoces que es el
máximo recorrido de la bobina sin que se destruya el diafragma (esto se
denomina desconado del altavoz). Esta potencia es mayor que la potencia
media máxima. Estas dos anteriores son quizás las más importantes pero
existen otras cuya medida es importante para conocer el comportamiento
de los altavoces a corto, mediano y largo plazo.
Potencia PMPO:
Es una especificación de potencia común en equipos
de consumo como radiograbadores o minicomponentes y representa una
especie de valor pico durante un tiempo extremadamente corto
(frecuentemente 10ms), dando valores mayores a la de la potencia pico
máximo. Es importante aclarar que esta especificación es del altavoz y no
del amplificador que lo alimenta, lo que puede dar falsas expectativas al
17
comprar un equipo. Se trata de una medida máxima en un corto tiempo,
pues aunque un altavoz diga que alcanza, por ejemplo, 200 vatios
P.M.P.O., generalmente su potencia real (RMS) es la mitad de lo que
alcanza el pico; es decir, su potencia real seria de 100 vatios
Potencia eléctrica a corto plazo (PMUS) : Especifica el máximo valor de
la potencia con que puede trabajar el altavoz (sobre la impedancia
nominal) sin que sufra daños permanentes, cuando se le excita con una
señal de prueba que simula el espectro musical durante 1 segundo o más
pero no pasa de un minuto.
Potencia eléctrica a largo plazo (PNOM) Especifica el máximo valor de la
potencia con que puede trabajar el altavoz (sobre la impedancia nominal)
sin que sufra daños permanentes, cuando se le excita con una señal de
prueba que simula el espectro musical durante 1 minuto; también a futuro
hace mucho daño en el sentido auditivo.
Potencia continúa senoidal:
Específica el máximo valor de la potencia
con que puede trabajar el altavoz (sobre la impedancia nominal) sin que
sufra daños permanentes (mecánicos o térmicos), cuando se le excita con
una señal senoidal continúa en una determinada banda de frecuencias.
Potencia de ruido:
Especifica el máximo valor de la potencia con que
puede trabajar el altavoz (sobre la impedancia nominal) sin que sufra
daños permanentes (mecánicos o térmicos), cuando se le excita con una
señal ruidosa en alguna banda del espectro.
Un parámetro importante (y muy relacionado con la potencia) de los
altavoces es la eficiencia. La eficiencia es una medida del rendimiento de
la transducción eléctrica-acústica. Es la relación de la potencia acústica
del altavoz y la potencia eléctrica necesaria para ello:
18
La eficiencia de un altavoz nunca supera el 50% y generalmente es
menor al 10%. En equipos domésticos (inclusive de alta calidad), la
eficiencia es del orden de 0.5-1%. Afortunadamente, no se requiere una
potencia acústica elevada para obtener un elevado volumen sonoro.
2.1.9.3 Impedancia
La impedancia se define como la oposición al paso de la corriente alterna.
En un altoparlante, o en toda carga inductiva-resistiva
o capacitiva-
resistiva, la impedancia difiere para cada frecuencia, por lo cual, los
fabricantes publican curvas de impedancia. Estas curvas se encargan de
mostrar la impedancia nominal del altoparlante, su impedancia mínima,
así como sus características de resonancia. Usualmente se observa que
un altoparlante de cono o diafragma al aire mostrará un pico de
impedancia en la frecuencia de resonancia.
Las impedancias normalizadas de los altavoces son 2, 3.2, 4, 6, 8, 16 y 32
ohmios, pero las más utilizadas son 4 en sonido automotriz, 6 para
sistemas mini componentes, 8 para los sistemas de alta fidelidad, 16 para
sistemas de sonido envolvente (surround) y auriculares.
2.1.9.4 Sensibilidad
Es el grado de eficiencia en la transducción electroacústica. Es decir,
mide la relación entre el nivel eléctrico de entrada al altavoz y la presión
sonora obtenida.
Suele darse en dB/W, medidos a 1 m de distancia y aplicando una
potencia de 1 W al altavoz (2,83 V sobre 8 Ω).
Los altavoces son transductores electroacústicos con una sensibilidad
muy pobre. Esto se debe a que la mayor parte de la potencia nominal
introducida en un altavoz se disipa en forma de calor. En los altavoces, a
diferencia del micrófono, la sensibilidad no es un indicativo de “calidad
sonora”, pues la práctica ha demostrado que altavoces de inferior
sensibilidad producen mejor “coloración sonora”.
19
2.1.9.5 Rendimiento
El rendimiento mide el grado de sensibilidad del altavoz. Es el tanto por
cien que indica la relación entre la Potencia acústica radiada y la Potencia
eléctrica de entrada. Potencia acústica / potencia eléctrica x 100.
2.1.9.6 Distorsión
El altavoz es uno de los sistemas de audio que presenta mayor distorsión,
por lo que los fabricantes no suelen suministrar al consumidor las cifras
de distorsión de sus altavoces. La distorsión tiene causas muy variadas:
flujo del entrehierro, vibraciones parciales, modulación de frecuencia
sobre el diafragma, alinealidad de las suspensiones, etc.
La mayor parte de la distorsión se concentra en el segundo y tercer
armónico, por lo que afectará en mayor medida a los tonos graves. Se
trata de una distorsión en torno al 10%.
En las medias y altas frecuencias esta distorsión es proporcionalmente
mucho menor y no llega al 1%, aunque en las gargantas de bocinas de
alta frecuencia esta distorsión se dispara hasta un margen del 10-15%.
2.1.10 Directividad de altoparlantes
Se encarga de indicar la dirección del sonido que genera el altoparlante,
es decir, la forma bajo la cual el sonido es disipado en el entorno. Una de
las principales características de la directividad es que esta no es
constante para todos los valores de frecuencia ya que cuando se trata de
frecuencias altas las características direccionales del parlante son
mayores en comparación a cuando estos reproducen bajas frecuencias,
en donde se presenta mayor omnidireccionalidad, es decir, igualdad
radiación en todas las direcciones.
La mejor forma de presentar la directividad de un altavoz es mediante un
diagrama
polar
que
normalmente
puede
ser
recogido
en
las
especificaciones dadas por el fabricante o bien sea puede ser medido.
20
Este diagrama es un esquema técnico que manifiesta la radiación del
altavoz en el espacio en grados para cada punto de sus ejes vertical y
horizontal.
Principalmente los altoparlantes se presentan en dos tipos diferentes, los
de radiación directa y los driver de compresión. Ambos poseen las
características anteriormente mencionadas, pero su diferencia radica en
la fabricación y el uso que pueden tener.
La forma más gráfica de dar la directividad es mediante un diagrama
polar, que normalmente es mostrado en las especificaciones, pues cada
modelo tiene una respuesta concreta.
Dependiendo de su directividad podemos decir que un cono de altavoz
es:
2.1.10.1 Omnidireccional O No Direccional
Radian igual en todas direcciones, es decir, en los 360º.
Por la importancia de la frecuencia de resonancia del propio altavoz, es
un diagrama polar muy poco utilizado en altavoces. Los altavoces que
utilizan esta direccionalidad requieren de grandes cajas acústicas.
Figura 6. Diagrama polar omnidireccional
21
2.1.10.2 Bidireccional.
El diagrama polar tiene forma de ocho.
Emiten sonido tanto por delante como por detrás, mientras que son
prácticamente “mudos” en los laterales.
Los ángulos preferentes se sitúan en torno a los 100º.
Los diagramas polares bidireccionales no se utilizan demasiado por
idénticas razones que los omnidireccionales: requieren de grandes cajas
acústicas.
Figura 7. Diagrama polar bidireccional
2.1.10.3 Unidireccionales
Son los altavoces que emiten el sonido en una dirección muy marcada y
son “relativamente muertos” en las otras.
Dentro de los direccionales, los más utilizados son los cardioides. El
altavoz cardioide se llama así porque su diagrama polar tiene forma de
corazón, lo que se traduce en que radian hacia la parte frontal del micro y
tienen un mínimo de sensibilidad en su parte posterior, donde se produce
una atenuación gradual. El ángulo preferente lo alcanza en un ángulo de
160º.
22
Figura 8. Diagrama polar cardioide
2.1.11Factor Q
Es una expresión matemática derivada de la directividad, la cual es
resultante de comparar el nivel en el eje con el nivel medido de todos los
puntos alrededor del altavoz. Las fuentes con una directividad específica
poseen altos valores de Q, mientras que una fuente de tipo
omnidireccional tiene un factor Q de 1.
2.1.12 Índice de directividad
Es la unidad de dirección angular de la radiación sonora de un altavoz,
este valor se presenta en nivel dB más alto o más bajo que si el sonido
fuese producido por una fuente esférica. Su cálculo es realizado mediante
la siguiente ecuación:
DI = 10 * log(Q)
Donde Q es el factor Q del altoparlante.
2.1.13 Tipos de Altavoces
Altavoz dinámico o Altavoz de bobina móvil: La señal eléctrica de entrada
actúa sobre la bobina móvil que crea un campo magnético que varía de
sentido de acuerdo con dicha señal. Este flujo magnético interactúa con
un segundo flujo magnético continuo generado normalmente por un imán
permanente que forma parte del cuerpo del altavoz, produciéndose una
23
atracción o repulsión magnética que desplaza la bobina móvil, y con ello
el diafragma adosado a ella. Al vibrar el diafragma mueve el aire que tiene
situado frente a él, generando así variaciones de presión en el mismo, o lo
que es lo mismo, ondas sonoras.
Altavoz electrostático o Altavoz de condensador: Estos altavoces tienen
una estructura de condensador, con una placa fija y otra móvil (el
diafragma), entre las que se almacena la energía eléctrica suministrada
por una fuente de tensión continua. Cuando se incrementa la energía
almacenada entre las placas, se produce una fuerza de atracción o
repulsión eléctrica entre ellas, dando lugar a que la placa móvil se mueva,
creando una presión útil.
Altavoz piezoeléctrico: En estos altavoces el motor es un material
piezoeléctrico (poliéster o cerámica), que al recibir una diferencia de
tensión entre sus superficies metalizadas experimenta alargamientos y
compresiones. Si se une a una de sus caras un cono abocinado, éste
sufrirá desplazamientos capaces de producir una presión radiada en alta
frecuencia.
Altavoz de cinta: El altavoz de cinta tiene un funcionamiento similar al
altavoz dinámico, pero con diferencias notables. La más obvia, en lugar
de bobina, el núcleo es una cinta corrugada.
Pantalla infinita: Es un sistema de colocación para altavoces dinámicos,
que consiste en integrar el altavoz en una gran superficie plana (por
ejemplo, una pared) con un agujero circular en el centro (donde va alojado
el cono del altavoz).
Altavoz Bassreflex: Es un sistema de construcción de altavoces para
mejorar la respuesta en bajas frecuencias. En una de las paredes de la
caja se abre una puerta (orificio en forma de tubo) y todos los parámetros
que afectan al volumen interno de la caja están previstos para que el aire
en el interior del tubo resuene en una baja frecuencia determinada.
24
Radiador auxiliar de graves. Como el bass-reflex, su finalidad es
proporcionar un refuerzo de graves. Se trata de un sistema similar al
bassreflex pero en lugar de un simple orificio en forma de tubo
convencional, este tubo se pliega en forma de laberinto.
Altavoz de carga con bocina: La bocina es un cono alimentado por un
motor que permite aumentar la señal eléctrica de entrada hasta en 10 dB
a la salida, con lo que son muy empleadas cuando se requiere gran
volumen sonoro.
Altavoz activo. Tipo de altavoz caracterizado por el uso de filtros activos
(digitales o analógicos), en lugar de filtros pasivos, para dividir el espectro
de audiofrecuencia en intervalos compatibles con los transductores
empleados. La señal es amplificada después de la división de frecuencias
con un amplificador dedicado por cada transductor.
Altoparlante de radiación directa.
Básicamente un altoparlante de radiación directa funciona al hacer
reaccionar con una señal eléctrica el campo magnético variable creado
por el embobinado con el flujo magnético fijo producido por el imán. Este
circuito en conjunto genera fuerzas con capacidad de mover la estructura
móvil o más bien llamado el diafragma del altoparlante, se encarga de
transmitir una variación de presión sonora mucho mayor al medio.
2.1.14 Driver de compresión
Los driver de compresión o también llamadas bocinas se encargan de
“combinar la alta eficiencia de un diafragma de grandes dimensiones con
la masa reducida de un pequeño altavoz. Este efecto se produce
acoplando el pequeño diafragma a una superficie radiante a través de un
tubo de sección creciente. Por esta razón, la familia de bocinas, al
25
contrario que los altavoces, encuentran dentro del grupo de altavoces de
radiación directa y permiten alcanzar eficiencias del 10 al 50%.” 5
2.1.15 Protocolos de comunicación
2.1.15.1 Puerto serie
Puerto
serie es una interfaz de comunicaciones de datos digitales,
utilizado por computadoras y periféricos, en donde la información es
transmitida bit a bit enviando un solo bit a la vez, en contraste con el
puerto paralelo que envía varios bits simultáneamente.
Figura 9. Conector DB9 Serial 6
A lo largo de la mayor parte de la historia de las computadoras, la
transferencia de datos a través de los puertos de serie ha sido
generalizada. Se ha usado y sigue usándose para conectar las
computadoras a dispositivos como terminales o módems. Los mouse,
teclados, y otros periféricos también se conectaban de esta forma.
Mientras que otras interfaces como Ethernet, FireWire, y USB mandaban
datos como un flujo en serie, el término "puerto de serie" normalmente
identifica el hardware más o menos conforme al estandarte municipal RS232, diseñado para interactuar con un módem o con un dispositivo de
comunicación similar.
5
PUEO ORTEGA Basilio y ROMÁ ROMERO Miguel. Electroacústica, altavoces y
micrófonos. Barcelona: Pearson, 2003. p.12.
6
Fuente: http://www.markallen.com/teaching
26
En muchos periféricos la interfaz USB ha reemplazado al puerto de serie
—en 2007, la mayor parte de las computadoras están conectadas a
dispositivos a través de USB, y a menudo ni siquiera tienen un puerto de
serie. El puerto de serie se omite para reducir los costes y se considera
que es un puerto heredado. Sin embargo, los puertos de serie todavía se
encuentran en sistemas de automatización industrial y algunos productos
industriales y de consumo respeto. Los dispositivos de redes (como
routers y switches) a menudo tienen puertos de serie para la
configuración. Los puertos de serie se usan a menudo en estas áreas
porque son sencillos, baratos y permiten la interoperabilidad entre
dispositivos. La desventaja es que configurar conexiones de serie puede
requerir el conocimiento de un experto y el uso de mandatos complejos si
están mal implementados.
Puerto serie tradicional: el puerto serie RS-232 (también conocido como
COM) utiliza cableado simple desde 3 hilos hasta 25 y conecta
ordenadores o microcontroladores a todo tipo de periféricos, desde
terminales a impresoras y módems pasando por ratones.
La interfaz entre el RS-232 y el microprocesador generalmente se realiza
mediante el integrado 82C50.
El RS-232 original tenía un conector tipo D de 25 pines, sin embargo la
mayoría de dichos pines no se utilizaban, por lo que IBM incorporó desde
su PS/2 un conector más pequeño de solamente 9 pines que es el que
actualmente se utiliza.
En Europa la norma RS-422 de origen alemán es también un estándar
muy usado en el ámbito industrial.
Puertos serie modernos
Uno de los defectos de los puertos serie iniciales era su lentitud en
comparación con los puertos paralelos -hablamos de 19.2 kbits por
segundo- sin embargo, con el paso del tiempo, están apareciendo
27
multitud de puertos serie de alta velocidad que los hacen muy
interesantes ya que utilizan las ventajas del menor cableado y solucionan
el problema de la velocidad con un mayor apantallamiento y más barato
usando la técnica del par trenzado. Por ello, el puerto RS-232 e incluso
multitud de puertos paralelos están siendo reemplazados por nuevos
puertos serie como el USB, el Firewire o el Serial ATA.
Tipos de comunicaciones seriales Simplex
En este caso el transmisor y el receptor están perfectamente definidos y
la comunicación es unidireccional. Este tipo de comunicaciones se
emplean usualmente en redes de radiodifusión, donde los receptores no
necesitan enviar ningún tipo de dato al transmisor.
Duplex, half duplex o semi-duplex
En este caso ambos extremos del sistema de comunicación cumplen
funciones de transmisor y receptor y los datos se desplazan en ambos
sentidos pero no simultáneamente. Este tipo de comunicación se utiliza
habitualmente en la interacción entre terminales y un computador central.
Full Duplex
El sistema es similar al duplex, pero los datos se desplazan en ambos
sentidos simultáneamente. Para ello ambos transmisores poseen
diferentes frecuencias de transmisión o dos caminos de comunicación
separados,
mientras
que
la
comunicación
semi-duplex
necesita
normalmente uno solo. Para el intercambio de datos entre computadores
este tipo de comunicaciones son más eficientes que las transmisiones
semi-duplex.
2.1.15.2 Puerto paralelo
Un puerto paralelo es una interfaz entre una computadora y un periférico
cuya principal característica es que los bits de datos viajan juntos
28
enviando un byte completo o más a la vez. Es decir, se implementa un
cable o una vía física para cada bit de datos formando un bus.
El cable paralelo es el conector físico entre el puerto paralelo y el
dispositivo periférico. En un puerto paralelo habrá una serie de bits de
control en vías aparte que irán en ambos sentidos por caminos distintos.
En contraposición al puerto paralelo está el Puerto serie, que envía los
datos bit a bit por el mismo hilo.
Figura 10. Un puerto paralelo de impresora en la parte trasera de un portátil Compaq N150 7.
Puerto paralelo Centronics
El puerto paralelo más conocido es el puerto de impresora (que cumplen
más o menos la norma IEEE 1284, también denominados tipo Centronics)
que destaca por su sencillez y que transmite 8 bits. Se ha utilizado
principalmente para conectar impresoras, pero también ha sido usado
para programadores EPROM, escáneres, interfaces de red Ethernet a 10
MB, unidades ZIP y SuperDisk y para comunicación entre dos PCs (MSDOS trajo en las versiones 5.0 ROM a 6.22 un programa para soportar
esas transferencias).
El puerto paralelo de las computadoras, de acuerdo a la norma Centronic,
está compuesto por un bus de comunicación bidireccional de 8 bits de
7
Fuente:
http://amp.bc.inter.edu/Modulos/Configuracion_PC/puertos/puerto_paralelo_hembra.jpg
29
datos, además de un conjunto de líneas de protocolo. Las líneas de
comunicación cuentan con un retenedor que mantiene el último valor que
les fue escrito hasta que se escribe un nuevo dato, las características
eléctricas son:
Tensión de nivel alto: 3.3 o 5 V.
Tensión de nivel bajo: 0 V.
Intensidad de salida máxima: 2.6 mA.
Intensidad de entrada máxima: 24 mA.
El sistema operativo gestiona las interfaces de puerto paralelo con los
nombres LPT1, LPT2 y así sucesivamente, las direcciones base de los
dos primeros puertos es:
LPT1 = 0x378.
LPT2 = 0x278
La estructura consta de tres registros: de control, de estado y de datos.
El registro de control es un bidireccional de 4 bits, con un bit de
configuración que no tiene conexión al exterior, su dirección en el LPT1 es
0x37A.
El registro de estado, se trata de un registro de entrada de información de
5 bits, su dirección en el LPT1 es 0x379.
El registro de datos, se compone de 8 bits, es bidireccional. Su dirección
en el LPT1 es 0x378.
Puerto paralelo IDE
No obstante existe otro puerto paralelo usado
masivamente en los ordenadores: el puerto paralelo IDE, también llamado
PATA (Paralell ATA), usado para la conexión de discos duros, unidades
lectoras/grabadoras
(CD-ROM,
DVD),
30
unidades
magneto-ópticas,
unidades ZIP y SuperDisk, entre la placa base del ordenador y el
dispositivo.
Puerto paralelo SCSI
Un tercer puerto paralelo, muy usado en los
ordenadores Apple Macintosh y en servidores, son las diferentes
implementaciones del SCSI. Al igual que IDE ha sido usado para la
conexión de discos duros, unidades ópticas lectoras/grabadoras (CDROM, DVD), unidades magneto-ópticas y [ y SuperDisk, pero también de
otros dispositivos como escáneres.
2.1.16 Micro-controlador
Un micro-controlador es un circuito integrado o chip que incluye en su
interior las tres unidades funcionales de una computadora: CPU, Memoria
y Unidades de E/S, es decir, se trata de un computador completo en un
solo circuito integrado.
Figura11.Microcontrolador Motorola 68HC11 y chips de soporte 8.
Son diseñados para disminuir el costo económico y el consumo de
energía de un sistema en particular. Por eso el tamaño de la CPU, la
cantidad de memoria y los periféricos incluidos dependerán de la
aplicación.
8
http://usuarios.lycos.es/hardwaresoftware/200px-MC68HC11_microcontroller.jpg
31
Figura 12. Esquema de un micro-controlador 9.
Los micro controladores representan la inmensa mayoría de los chips de
computadoras vendidos, sobre un 50% son controladores "simples" y el
restante corresponde a DSPs más especializados. Mientras se pueden
tener uno o dos microprocesadores de propósito general en casa (vd. está
usando uno para esto), usted tiene distribuidos seguramente entre los
electrodomésticos de su hogar una o dos docenas de microcontroladores.
Pueden
encontrarse
en
casi
cualquier
dispositivo
electrónico como automóviles, lavadoras, hornos microondas, teléfonos,
etc.
Un micro controlador difiere de una CPU normal, debido a que es más
fácil convertirla en una computadora en funcionamiento, con un mínimo
de chips externos de apoyo. La idea es que el chip se coloque en el
dispositivo, enganchado a la fuente de energía y de información que
necesite, y eso es todo. Un microprocesador tradicional no le permitirá
hacer esto, ya que espera que todas estas tareas sean manejadas por
otros chips. Hay que agregarle los módulos de entrada/salida (puertos) y
la memoria para almacenamiento de información.
Un microcontrolador típico tendrá un generador de reloj integrado y una
pequeña cantidad de memoria RAM y ROM/EPROM/EEPROM/FLASH,
significando que para hacerlo funcionar, todo lo que se necesita son unos
9
Fuente : http://insectrobots.blogia.com/upload/20090214180203-400px-microcontrolador.jpg
32
pocos programas de control y un cristal de sincronización. Los
microcontroladores disponen generalmente también de una gran variedad
de dispositivos de entrada/salida, como convertidores de analógico a
digital, temporizadores, UARTs y buses de interfaz serie especializados,
como I2C y CAN. Frecuentemente, estos dispositivos integrados pueden
ser controlados por instrucciones de procesadores especializados. Los
modernos micro-controladores frecuentemente incluyen un lenguaje de
programación integrado, como el BASIC que se utiliza bastante con este
propósito.
Los micro-controladores negocian la velocidad y la flexibilidad para
facilitar su uso. Debido a que se utiliza bastante sitio en el chip para incluir
funcionalidad, como los dispositivos de entrada/salida o la memoria que
incluye el micro-controlador, se ha de prescindir de cualquier otra
circuitería.
2.1.17 Los PICS
Los 'PIC' son una familia de microcontroladores tipo RISC fabricados por
Microchip Technology Inc. y derivados del PIC1650, originalmente
desarrollado por la división de microelectrónica de General Instruments.
Figura 13. PIC 10
El nombre actual no es un acrónimo. En realidad, el nombre completo es
PICmicro, aunque generalmente se utiliza como Peripheral Interface
Controller (Controlador de Interfaz Periférico).
10
http://www.instructables.com
33
El PIC original se diseñó para ser usado con la nueva UCP de 16 bits
CP16000. Siendo en general una buena UCP, ésta tenía malas
prestaciones de E/S, y el PIC de 8 bits se desarrolló en 1975 para mejorar
el rendimiento del sistema quitando peso de E/S a la UCP. El PIC
utilizaba microcódigo simple almacenado en ROM para realizar estas
tareas; y aunque el término no se usaba por aquel entonces, se trata de
un diseño RISC que ejecuta una instrucción cada 4 ciclos del oscilador.
El PIC usa un juego de instrucciones tipo RISC, cuyo número puede
variar desde 35 para PICs de gama baja a 70 para los de gama alta. Las
instrucciones se clasifican entre las que realizan operaciones entre el
acumulador y una constante, entre el acumulador y una posición de
memoria,
instrucciones
de
condicionamiento
y
de
salto/retorno,
implementación de interrupciones y una para pasar a modo de bajo
consumo llamada sleep.
Microchip proporciona un entorno de desarrollo freeware llamado MPLAB
que incluye un simulador software y un ensamblador. Otras empresas
desarrollan
compiladores
C
y
BASIC.
Microchip
también
vende
compiladores para los PICs de gama alta ("C18" para la serie F18 y "C30"
para los dsPICs) y se puede descargar una edición para estudiantes del
C18 que inhabilita algunas opciones después de un tiempo de evaluación.
Para Pascal existe un compilador de código abierto, JAL, lo mismo que
PicForth para el lenguaje Forth. GPUTILS es una colección de
herramientas distribuidas bajo licencia GNU que incluye ensamblador y
enlazador, y funciona en Linux, MacOS y Microsoft Windows. GPSIM es
otra herramienta libre que permite simular diversos dispositivos hardware
conectados al PIC.
2.1.17.1 PICs usados comúnmente
•PIC12C508/509 (encapsulamiento reducido de 8 pines, oscilador interno,
popular en pequeños diseños como el iPod remote)
34
•PIC16F84 (Considerado obsoleto, pero imposible de descartar y muy
popular)
•PIC16F84A (Buena actualización del anterior, algunas versiones
funcionan a 20 MHz, compatible 1:1)
•PIC12F629/675
•PIC16F628
•PIC16F88 (Nuevo sustituto del PIC16F84A con más memoria, oscilador
interno, PWM, etc que podría convertirse en popular como su hermana
menor)
•La familia PIC16F87X y PIC16F87XA
•PIC18F2455 y similares con puerto USB 2.0
•PIC18F2550
•PIC18F452
•PIC18F4550
•dsPIC30F3011 (Ideales para control electrónico de motores eléctricos de
inducción)
•PIC32 (Nueva gama de PIC de 32 bits)
En el desarrollo de este proyecto se utilizara el pic16f877A puesto que
debido a sus características se acopla perfectamente en las aplicaciones
requeridas para el proceso de comunicación serial entre la parte
mecánica y la etapa de software.
2.1.17.2 Programación del PIC
Para transferir el código de un ordenador al PIC normalmente se usa un
dispositivo llamado programador. La mayoría de PICs que Microchip
distribuye hoy en día incorporan ICSP (In Circuit Serial Programming,
programación serie incorporada) o LVP (Low Voltage Programming,
35
programación a bajo voltaje), º permite programar el PIC directamente en
el circuito destino. Para la ICSP se usan los pines RB6 y RB7 como reloj y
datos y el MCLR para activar el modo programación aplicando un voltaje
de unos 11 voltios. Existen muchos programadores de PICs, desde los
más simples que dejan al software los detalles de comunicaciones, a los
más complejos, que pueden verificar el dispositivo a diversas tensiones
de
alimentación
e
implementan
en
hardware
casi
todas
las
funcionalidades. Muchos de estos programadores complejos incluyen
ellos mismos PICs preprogramados como interfaz para enviar las órdenes
al PIC que se desea programar. Uno de los programadores más simples
es el TE20, que utiliza la línea TX del puerto RS232 como alimentación y
las líneas DTR y CTS para mandar o recibir datos cuando el
microcontrolador
está
en
modo
programación.
El
software
de
programación puede ser el ICprog, muy común entre la gente que utiliza
este tipo de microcontroladores.
Programadores
•PICStart Plus (puerto serie y USB)
•Promate II (puerto serie)
•MPLAB PM3 (puerto serie y USB)
•ICD2 (puerto serie y USB)
•PICKit 1 (USB)
•IC-Prog 1.06B
•PICAT 1.25 (puerto USB2.0 para PICs y Atmel)
•WinPic 800 (puerto paralelo, serie y USB)
•Terusb1.0
•
•
ICD (Serie)
ICD2 (USB)
36
Emuladores
•
Proteus - ISIS
•
ICE2000 (puerto paralelo, convertidor a USB disponible)
•
ICE4000 (USB)
•
PIC EMU
•
PIC CDlite
Tamaño de palabra
El tamaño de palabra de los microcontroladores PIC es fuente de muchas
confusiones. Todos los PICs (excepto los dsPIC) manejan datos en trozos
de 8 bits, con lo que se deberían llamar microcontroladores de 8 bits. Pero
a diferencia de la mayoría de UCPs, el PIC usa arquitectura Harvard, por
lo que el tamaño de las instrucciones puede ser distinto al de la palabra
de datos. De hecho, las diferentes familias de PICs usan tamaños de
instrucción distintos, lo que hace difícil comparar el tamaño del código del
PIC con el de otros microcontroladores. Por ejemplo, un microcontrolador
tiene 6144 bytes de memoria de programa: para un PIC de 12 bits esto
significa 4096 palabras y para uno de 16 bits, 3072 palabras.
2.1.18 Motor eléctrico
Los motores eléctricos son dispositivos capaces de convertir la energía
eléctrica en mecánica y mecánica en eléctrica. Esto aclara que el motor
eléctrico cambia de nombre, por el de “generador”, cuando realiza la
última conversión utilizada. Es este un buen recurso para corroborar el
principio de conservación de la energía y continuamente destacar los
innumerables usos que pueden tener este tipo de conversión.
Por esta razón, los motores eléctricos son constantemente utilizados en
instalaciones industriales y demás labores electromecánicas que no
requieran autonomía en su fuente de alimentación; ya que la energía
eléctrica es difícil de almacenar. Como ejemplo de esta situación se tiene
37
que varios kilos equivalentes en una batería son lo mismo que 80 gramos
de gasolina. Esta es ahora una de las razones de la nueva aparición de
los vehículos híbridos, los cuales aprovechan las ventajas de ambas
situaciones.
Ventajas:
Se encontró que en la mayoría de circunstancias, las ventajas hacen una
leve comparación a los motores de combustión.
Reducción de tamaño peso y potencia.
Pueden ser construidos de cualquier tamaño.
Tiene un par de giro elevado y prácticamente constante, según el tipo
de motor.
Posee
rendimiento
elevado,
aproximadamente
al
80%
con
posibilidades de aumento a medida que se incrementa la potencia.
2.1.19 Motores de paso
El motor de paso es un elemento mecánico, utilizado para la construcción
de mecanismos que requieran movimientos muy precisos. A diferencia de
los normales, los motores paso a paso tienen la posibilidad de
estacionarse en un punto, lo que quiere decir que estos motores no giran
en un solo sentido. Para lograr
estacionarse,
los motores de paso
activan o desactivan las bobinas requeridas en el orden específico de la
serie de accionamientos. A este orden de accionamientos se le conoce
como pasos; que en resumidas cuentas es la base dinámica de dichos
motores.
Así como son mencionadas sus ventajas, los motores de paso presentan
inconvenientes. A la hora de mantener su posición, los motores de paso
requieren consumir energía constante; además si se les aplica una fuerza
mayor, perderá su orden de posición.
38
El motor de paso tiene dos componentes o partes principales: el estator,
quien rodea el eje principal, sosteniendo las bobinas y el rotor quien será
el encargado de girar según las variaciones de carga. Cada estator varía
según el número de bobinas que contenga.
2.1.20 Motores de corriente continúa
Existen diversos tipos de motores de corriente continua, clasificados
según la forma como estén conectados:
Motor serie
Motor compound.
Motor shunt.
Motor eléctrico sin escobillas.
Los motores eléctricos mencionados anteriormente son motores de alto
rendimiento y potencia. A continuación se mencionarán los motores de
más baja potencia pero con el mismo rendimiento, utilizados en
electrónica.
Motor paso a paso.
Servomotor.
Motor sin núcleo.
2.1.21 Introducción de reductores y motorreductores
Las funciones electromotrices son variadas a medida que se juega con los
tipos de actividades que cumplen los motores mencionados. Para
los siguientes ítems contextuales, se tiene que la relación de
entrada en RPM es modificada en la salida; así que en esta labor
39
se emplean los reductores y motorreductores, los cuales estarán
presentados a continuación.
2.1.22 Reductores y Motorreductores
Los reductores o motorreductores son utilizados para disminuir la
velocidad del motor de forma eficiente y segura, transmitiendo además su
fuerza generada por correas, trenes de engranajes y cadenas, que
generalmente presentan inconvenientes.
Beneficios sobre las formas de reducción:
Regularidad en velocidad y potencia
Eficiencia entre la potencia suministrada y la transmitida.
Reducen costos de mantenimiento, aportando mayor seguridad en
transmisión.
Ahorro de espacio
Menor tiempo de instalación.
Generalmente, los motorreductores se acoplan a un motor eléctrico
cerrado y asincrónico, refrigerado por ventilador con posibilidad de
conexión para redes trifásicas de 220/440 voltios y 60 Hz.
La protección de los motorreductores se efectúa a partir de un guarda
motor que limita la intensidad y un relé térmico de sobrecarga. Las placas
de identificación del motor, llevan grabados los datos nominales del
mismo.
Una guía para la elección del tamaño de un motorreductor son:
Características de operación:
Potencia de entrada y de salida
40
Velocidad, dada en RPM, (diferente en la entrada como en la salida)
Torque máximo en la salida
Relación de reducción.
Características del trabajo a realizar:
Tipo de máquina, (si el motor es eléctrico o a gasolina, etc.).
Tipo de acople entre la maquina motriz y el motorreductor.
Tipo de carga.
Tiempo de duración en servicio.
Arranques por hora o inversión de marcha.
41
3. METODOLOGÍA
3.1 ENFOQUE DE LA INVESTIGACIÓN
El desarrollo de este proyecto se llevó a cabo mediante una metodología
empírico analítica orientando el trabajo al contraste permanente de la
teoría con la verificación experimental.
En el diseño y construcción de la mesa giratoria fue de vital importancia
tener en cuenta toda la teoría mecánica de movimiento circular uniforme,
torques, materiales, distribución de fuerzas, etc.; aplicarlas al diseño
contrastando los cálculos matemáticos con la experimentación indagado
hacia la solución más confiable y práctica para la solución del problema.
Asimismo la programación necesaria para el desarrollo del software y la
electrónica de microcontroladores; nos llevó a analizar los diferentes
caminos que se pueden tomar y ensayar para el correcto funcionamiento
y desarrollo del dispositivo.
3.2 LÍNEA DE INVESTIGACIÓN DE USB / SUB-LÍNEA DE FACULTAD /
CAMPO TEMÁTICO DEL PROGRAMA
Adoptando el enfoque de investigación de la universidad de San
buenaventura, se sitúa el actual proyecto en la línea de tecnologías
actuales y sociedad, buscando proveer una ayuda y mejoramiento en la
solución del problema planteado al que se ven expuestos todos aquellos
que de una forma u otra necesitan realizar mediciones de patrón polar de
altavoces.
Por esta razón se realiza una contextualización de las tecnologías en
diferentes áreas con el fin de efectuar las adaptaciones requeridas en la
solución de dicho problema y satisfacer las necesidades de quienes lo
padecen.
42
De igual forma la sub-línea de investigación a la que se adhiere el
proyecto es la de procesamiento de señales digitales y/o analógicas
abordando el diseño y construcción de un dispositivo que garantice
facilitar la forma de adquirir información a partir de señales externas, su
almacenamiento, manejo matemático y posterior visualización.
En último lugar se suscribe el proyecto en el campo de diseño de
sistemas de sonido, puesto que se genera una solución a un problema
práctico de medición, desarrollando un dispositivo aplicable a un sistema
radiante y haciendo un análisis a través de un método de captación
sonora junto con un estudio de los parámetros electro acústico del
sistema.
3.3 TÉCNICAS DE RECOLECCIÓN DE INFORMACIÓN
La recolección de información del proyecto aquí desarrollado realiza con
dos instrumentos diferentes de medición.
Uno es un sonómetro svantek tipo 2 con un micrófono de captación tipo I
cuyas principales características se mencionan a continuación:
Figura 14. Sonómetro Svantek, Modelo: 943ª 11
11
http://www.svantek.cl/943B.htm
43
Principales Características:
•
Medidor de nivel sonoro tipo 2 con micrófono tipo 1
•
Filtros de 1/1 y 1/3 octava
•
Dosímetro para salud ocupacional
•
Opciones de fft, tonalidad y rt
•
Tres detectores totalmente programables (perfiles)
•
Filtros a / c / lin (z) / usuario (3)
•
Constantes de tiempo slow / fast / impulse
•
Memoria de 8 mb (hasta 48 mb)
•
Buffer programable desde 1ms hasta 1h
•
Ciclo de medición programable
•
remoteable via modem
•
spl, leq, sel, peak, max, min, ltm3, ltm5,
•
Percentiles (ln) e historia temporal para cada detector
•
8 horas de autonomía con batería interna
•
iec 651, iec 804 y iec 61672-1
Los micrófonos de medición de la universidad de San Buenaventura
Berhinger Ecm8000 cuyas características son estas:
Figura 15. Micrófono de medición ECM8000 12
12
http://www.behringer.com/en/products/ecm8000.aspx
44
La respuesta de frecuencia lineal del ECM8000 y el diagrama polar
omnidireccional le permite realizar las tareas de medición y alineación con
el mínimo problema y la máxima precisión.
La interfaz de audio utilizada es la Maudio Fast Track Pro Por ser una
interfaz con bajo nivel de ruido, con una respuesta en frecuencia bastante
plana y compatible con matlab.
Figura 16. Interfaz de audio MAUDIO, Fast Track Pro 13
Características
Interfaz de audio a 24 bits/44.1kHz
2 entradas de preamplificación de micro/instrumento en el panel frontal
(conectores híbridos Neutrik XLR/TRS ¼”) con:
Controles de ganancia
Alimentación phantom
Indicadores de señal/pico
Atenuación para cada entrada
13
http://la.m-audio.com/products/es_la/FastTrackPro.html
45
Conector de inserción (TRS ¼”) para procesadores externos
2 salidas balanceadas (TRS¼”)
4 salidas no balanceadas (RCA)
2 x 2 entradas/salidas digitales S/PDIF con 2 canales PCM
La salida S/PDIF también permite transferir contenidos surround con
codificación AC-3/DTS
1 x 1 entrada/salida MIDI con LEDs indicadores de actividad
Salida de auriculares (TRS ¼”) con control de nivel
Conmutador de fuente A/B de auriculares para aplicaciones de DJ
Control de mezcla de entrada/reproducción para monitorización hardware
directa
Conmutador mono para monitorización directa de entrada/reproducción
Control de nivel de salida master
Monitorización hardware directa con latencia casi inexistente
Monitorización software ASIO de baja latencia
Conexión USB con la computadora
Alimentación a través del puerto USB o con un alimentador de CA
opcional
3.4 HIPÓTESIS
A través de elementos mecánicos, eléctricos y electrónicos es posible
construir una mesa giratoria automática, donde se ubique la fuente
sonora. Dicha mesa es manipulada mediante un software donde el
usuario define los parámetros de rotación y tiempo de duración en cada
punto de medición y da la orden de que inicie el proceso de medición,
durante el cual el software adquieren los datos, y los almacena para su
46
posterior análisis e interpretación grafica; disminuyendo de esta manera
los errores sistemáticos producidos por el hombre en dichas mediciones y
proporcionando una mayor exactitud en los resultados finales de la
medición.
3.5 VARIABLES
3.5.1 Variables Independientes
•
Velocidad de transmisión de datos
3.5.2 Variables Dependientes
•
Velocidad de rotación de la mesa giratoria.
•
Tipo de micrófono para medición del nivel sonoro.
•
Materiales y elementos de construcción.
•
Peso de altoparlantes y cabinas.
•
protocolo de comunicación de datos.
•
Lenguaje de programación del software.
4. DESARROLLO INGENIERIL
47
El desarrollo de este proyecto está claramente dividido en tres etapas
específicas: mecánica, electrónica y programación, cada una de ellas
cumple con una función específica dentro del todo del sistema pero se
trabaja de una forma independiente. Para entender el sistema en su
totalidad se procede a presentar el sistema con un diagrama de cada
parte.
4.1 Etapa mecánica
La forma como se encuentra distribuido el sistema mecánico se muestra
en el siguiente diagrama, allí se aprecia las partes que componen el
sistema.
El sistema está pensado como un sistema de un horno microondas donde
una superficie principal gira apoyada en unos rodillos; en este caso cuatro
rodamientos ubicados de forma que soporten el peso de la cabina que se
48
va a colocar encima de ellos. En el centro se encuentra ubicado un
rodamiento que permite el giro de la superficie junto con el peso de la
cabina que lleva encima.
En la superficie redonda, que es la que gira, se encuentran 360 pines de
una longitud media de 2 cm ubicados espacialmente cada grado y un pin
más grande ubicado especialmente para que al colocarse la pesa en el
punto cero este cierre un swich de final de carrea del que se hablará más
adelante.
La forma en la que se mueve la superficie que soporta el peso está dada
por el rozamiento de un moto-reductor ubicado en un extremo de la
misma. Este moto-reductor se apoya a través de un sistema de posición
dentro de un par de canales donde se puede ajustar la posición del motor
horizontal y verticalmente.
Este motor recibe la orden de moverse o
detenerse a través de un
circuito que le envía o le corta una señal de 12 voltios.
A continuación se procede a realizar el diseño del sistema mecánico.
Figura 17. Sistema mecánico
49
Figura 18-19. Sistema mecánico
4.1.1 Despiece del sistema mecánico
Seguidamente se muestra
el modelo a construir especificando cada
pieza del sistema y su función así como los planos de diseño
4.1.1.1 Base
La base del sistema es una lámina de hierro sostenida por seis soportes
en ángulo cuya función es la de mantener todo el sistema, sobre ella se
ubican: el rodamiento principal, los soportes de la superficie giratoria, los
soportes del motor y las bases de los elementos electrónicos dispuestos
para realizar el conteo de los grados.
Figura 20. Plano Base
50
Figuras 21, 22. Diseño de la base del sistema mecánico.
4.1.1.2 Rodamiento principal
El rodamiento es un elemento mecánico que reduce la fricción entre un
eje y las piezas conectadas a éste, sirviéndole de apoyo y facilitando su
desplazamiento. Se ubica en el extremo curvo de la mesa giratoria, su
función es la de permitir el movimiento del sistema y ayudar en el soporte
del peso.
30
O
Figura 23. Plano del rodamiento principal
51
50
Figura 24. Diseño del rodamiento principal
4.1.1.3 Superficie Giratoria
Se trata de una lámina en hierro de forma circular Con un diámetro de 60
cm, posee en el centro una reducción de sección en forma avellanada
para permitir que encaje en el rodamiento principal, cuenta además con
360 pines distribuidos de forma equidistante en la superficie quienes
equivalen cada uno a un grado. Por último un pin de mayor tamaño
colocado a cierta distancia del borde de la superficie diseñado para
calibrar el sistema al punto cero, es decir, este pin será el que cierre el
swich de calibración cuando la mesa se encuentre en el punto cero.
Vale la pena aclarar que el pin no está en el punto cero sino que calibra
la mesa en ese punto.
O
O
600
70
0
O 60
O 50
Figura 25. Plano de la superficie giratoria
52
Figura 26-27. Superficie giratoria en plano abierto y en detalle
4.1.1.4 Rodamientos de soporte para la superficie giratoria
Se encuentran distribuidos debajo de la superficie giratoria 4 rodamientos
sujetos a la base principal. Al igual que el rodamiento principal estos
ayudan en el sostenimiento de la misma y en distribución de las fuerzas
que actúan sobre ella al colocar la cabina o bafle encima, facilitando de
este modo el movimiento y disminuyendo el trabajo que debe realizar el
3
motor.
30
1
3,2
R
15
O
15
8
O 30
30
20
20
30
4
O1
3
Figura 28. Plano de la base y el rodamiento de soporte de la superficie giratoria.
53
Figura 29-30. Diseño de los rodamientos de soporte y su ubicación en la base del sistema.
4.1.1.5 Soporte Motor
En la parte del costado se encuentra ubicada una lámina con unos rieles
en los que se coloca por medio de dos tornillos una pieza de forma
circular que sirve como una especie de abrazadera para la ubicación del
motor. El acople de estas dos pieza permite el movimiento y la
acomodación correcta del motor de forma horizontal, para acercarlo o
alejarlo de la superficie giratoria y de forma vertical para cuadrar la altura
del motor.
84,53
R5
30
35
O 70
O 6,65
78,42
78,76
R
15
58,83
O
O
2
5,9
20
73,86
4
84,53
70
Figura 31. Plano del soporte del motor.
54
Figura 32-33. Elemento cilíndrico donde se ubica el motor. Rieles de ubicación del motor en el eje
horizontal.
Figura 34. Acople del sistema de soporte del motor
55
4.1.1.6 Base para elementos electrónicos
Se sitúan debajo de la superficie giratoria dos bases hechas en aluminio
para ubicar los elementos electrónicos correspondientes a la tarea de
calibración y conteo de grados.
25
10
10
30
30
20
O5
10
23
25
Figura 35. Plano de base para elementos electrónicos.
Figura 36-37. Diseño de base para elementos electrónicos. Ubicación en la base principal del
sistema.
56
4.1.1.7 Motor
El motor utilizado es un motorreductor que se ubica en el soporte ya
mencionado y cuya función es la de mover todo el sistema. Aunque se
muestran los planos de este no significa que el mismo haya sido
construido; se adquirió en el mercado, el diseño se realizó para
34
28
complementar el modelo del sistema mecánico.
13
10
38
32,26
O
34
2
O2
Figura 38-39. Plano del motorreductor. Diseño del motorreductor
57
4.2 Etapa de electrónica
En el desarrollo de este proyecto es necesario implementar una interfaz
de comunicación entre la parte mecánica y el computador para el control
del sistema. Esta interfaz de comunicación se implementa con un circuito
electrónico que comunica las dos partes
La etapa electrónica cumple la función de unir el software y la mesa
giratoria
El circuito posee dos divisiones principales la primera es la de control y la
segunda la de potencia, estos dos se unen por medio de cables
Diagrama general de la electrónica utilizada para el diseño del circuito a
implementar en el desarrollo de la interfaz de comunicación.
58
El anterior diagrama revela el modo del funcionamiento del circuito,
comienza con una señal enviada desde el computador por medio del
puerto serial al circuito de control al recibir dicha señal este activa un el
programa del pic16f877A el cual envía señal de movimiento al motor
mediante un circuito de potencia, al mismo tiempo un opto acoplador de
herradura envía la señal de pulsos que utiliza el pic para llevar a cabo el
conteo de los grados.
Como se menciono anteriormente este circuito se divide en dos partes la
de control y conteo y la de potencia donde se alimenta el motor, a
continuación se procede a explicar en detalle las partes y funcionamiento
del circuito desarrollado para la implementación de la interfaz de
comunicación.
4.2.1 Circuito de control
Es la parte central de la interfaz de comunicación se comunica con el
computador y con la parte de movimiento del sistema mecánico. El
circuito se fundamenta en el uso del pic16f1877a de microchip y se
comunica a través del puerto serie del computador, sin embargo ya que
un microcontrolador trabaja con niveles de voltaje TTL y el puerto serie
trabaja con niveles de voltaje de acuerdo a la norma RS232 se hace
imposible realizar una conexión “directa” de un microcontrolador al puerto
serie de la computadora (Ver tabla 1). Por ello se hace necesario
implementar un modulo adaptador de RS232 a TTL, que sea capaz de
convertir los niveles de voltaje de RS232 a TTL para realizar una
transmisión de datos (desde la computadora) y de TTL a RS232 para
realizar una recepción de datos (desde el microcontrolador).
59
Entrada
TTL
Salida
0
0V-0,8V
1
2V-5V
0
0V-0,4V
1
2,4V-5V
0
-3V-15V
+3V
RS232 Entrada
1
/+15V
0
+5V/15V
-5V/-
Salida
1
15V
Tabla1. Niveles de voltaje TTL y RS232
A) Max232
Figura 40. Circuito integrado Max 232 14
Con este propósito se utiliza el MAX232, un circuito integrado que realiza
esta tarea adecuadamente. Para su correcto funcionamiento sólo requiere
de cuatro capacitores electrolíticos y una fuente de alimentación de 5V.
14
http://upload.wikimedia.org/wikipedia/commons/c/cc/Max232.jpg
60
Figura 41. Especificación de los pines y construcción del circuito integrado Max 232 15
Como se menciono anteriormente el MAX232 soluciona la conexión
necesaria para lograr comunicación entre el puerto serie de una PC y
cualquier otro circuito con funcionamiento en base a señales de nivel
TTL/CMOS.El circuito integrado posee dos conversores de nivel TTL a
RS232 y otros dos que, a la inversa, convierten de RS232 a TTL, estos
conversores son suficientes para manejar las cuatro señales más
utilizadas del puerto serie del PC, que son TX, RX, RTS y CTS.
TX es la señal de transmisión de datos, RX es la de recepción, y RTS y
CTS se utilizan para establecer el protocolo para el envío y recepción de
los datos.
Teniendo este integrado ya se hace posible la comunicación entre el
puerto serie del pc y el microcontrolador.
15
Fuente: Max 232 Data Sheet
61
B) Pic 16f877A
Figura 42. Microcontrolador PIC16f877A 16
Figura 43. Especificación de los pines del microcontrolador PIC16f877A 17
El Pic16f877A es el encargado de llevar acabo todo el manejo de control y
conteo mediante un programa impreso en él, dicho programa se explicará
más adelante en la etapa de programación. El microcontrolador
PIC16F877A posee varias características importantes que lo hacen un
dispositivo muy versátil, eficiente y práctico para ser empleado en el
desarrollo del presente proyecto estas son:
-
Soporta modo de comunicación serial.
-
Amplia memoria para datos y programa.
16
Fuente: http://www.hvwtech.com/products/7/28000_PV.jpg
17
Fuente: Data sheet
62
-
Memoria reprogramable: La memoria en este PIC es la que se
denomina
FLASH;
este
tipo
de
memoria
se
puede
borrar
electrónicamente (esto corresponde a la “F” en el modelo).
-
Set de instrucciones reducido (tipo RISC), pero con las instrucciones
necesarias para facilitar su manejo.
Las características generales del micro controlador se muestran en el
anexo A.
Descripción de los puertos:
Puerto A:
•
Puerto de e/s de 6 pines
•
RA0 y AN0
•
RA1 y AN1
•
RA2, AN2 y Vref-
•
RA3, AN3 y Vref+
•
RA4 (Salida en colector abierto) y T0CKI(Entrada de reloj del modulo
Timer0)
•
RA5 RA5, AN4 y SS (Selección esclavo para el puerto serie síncrono)
Puerto B:
•
Puerto e/s 8 pines
•
Resistencias pull-up programables
•
RB0 Interrupción externa
•
RB4-7 Interrupción por cambio de flanco
•
RB5-RB7 y RB3 programación y debugger in circuit
Puerto C:
•
Puerto e/s de 8 pines
•
RC0 RC0, T1OSO (Timer1 salida oscilador) y T1CKI (Entrada de reloj
del modulo Timer1).
•
RC1-RC2 PWM/COMP/CAPT
•
RC1
T1OSI (entrada osc timer1)
63
•
RC3-4
IIC
•
RC3-5
SPI
•
RC6-7
USART
Puerto D:
•
Puerto e/s de 8 pines
•
Bus de datos en PPS (Puerto paralelo esclavo)
•
Puerto E:
•
Puerto de e/s de 3 pines
•
RE0 y AN5 y Read de PPS
•
RE1 y AN6 y Write de PPS
•
RE2 y AN7 y CS de PPS
La descripción de los pines se encuentra en el anexo B.
En la interfaz de comunicación aquí implementada se utilizan los puertos
RB como entrada utilizando el pin 33 para el ingreso de los pulsos de
conteo de grados enviados desde un optoacoplador de herradura yel pin
40 como entrada de la señal de punto cero de la mesa, dicha señal es
enviada desde un swich de final de carrera que se cierra al ubicarse la
mesa en el punto inicial.
Los pines 24 y 25 se utilizan para el envío y recepción de datos desde y
hacia el computador por medio del max 232.
Los otros pines utilizados son los necesarios para el correcto
funcionamiento del microcontrolador.
64
C) Opto acoplador de herradura
Figura 44. Optoacoplador de herradura
Un optoacoplador, es un dispositivo de emisión y recepción de luz que
funciona como un interruptor excitado mediante la luz. La mencionada luz
es emitida por un diodo LED que satura un componente optoelectrónico,
normalmente en forma de fototransistor. De este modo se combinan en un
solo dispositivo semiconductor, un fotoemisor y un fotorreceptor cuya
conexión entre ambos es óptica. El optoacoplador de herradura se
encarga de enviar la señal de pulsos al pic para su conteo. Dichas
señales se dan gracias a la interrupción causada por los pines de la mesa
giratoria que interrumpen la señal de luz propia del optoacoplador.
Este circuito se alimenta por una batería de 9 voltios, un regulador de
voltaje 78M05 que se utiliza para la regulación del voltaje a 5v y un
condensador para estabilizar la carga.
4.2.2 Circuito de potencia
El circuito de potencia difiere con el de control ya que requiere una fuente
de voltaje de 12 voltios dc. Estas fuentes separadas se hace necesario
utilizarlas puesto que al ser un sistema que requiere alta precisión se
hace susceptible a cualquier ruido eléctrico lo que altera el buen
funcionamiento del sistema de conteo de grados.
65
De el pic salen conectores hacia la parte de potencia a un opto acoplador
Dmct6, este optoacoplador cumple la función de proteger el circuito de
corriente hacia el circuito de control.
Figura 45-46 Optoacoplador encapsulado MCT6. Diseño típico con optoacoplador
Este circuito de potencia está compuesto por un amplificador operacional
2n2222, un transistor bipolar NPN de baja potencia que puede amplificar
pequeñas corrientes a tensiones pequeñas o medias, sin embargo sólo
puede tratar potencias bajas (no mayores de medio vatio), por lo que se
hace necesaria la implementación de una etapa amplificadora, usando un
transistor de potencia TIP 31C, el cual por sus cualidades permite
manejar las corrientes que el motor necesita para su funcionamiento.
Figura 47. Tip31C Transistor de Potencia 18
18
Fuente: http://www.deretna.com/vb/attachment.php?attachmentid=16960&d=1228629862
66
El siguiente es el diagrama detallado del circuito implementado en el
desarrollo de la interfaz de comunicación entre el computador y la mesa.
Figura 48. Plano del circuito electrónico utilizado en la interfaz de comunicación.
67
4.3 Etapa de programación
En tercera medida se implementa la parte de programación del proyecto,
el siguiente esquema muestra los requerimientos de software que se
requieren.
La etapa de programación para el desarrollo de este proyecto se divide en
dos, el primero es un pequeño programa diseñado para el conteo de los
grados que se utiliza en el pic16f877A y la segunda es un programa
desarrollado para la recepción de señal del altavoz el guardado de datos
y la gráfica.
4.3.1 Programación del PIC16f877A
La programación del microcontrolador se llevo a cabo en el software picC
que es un software dispuesto para este propósito y mediante el cual se
puede realizar el acoplamiento del microcontrolador y el software Matlab.
68
A continuación se enumera la secuencia del programa que ejecuta el
microcontrolador
1. Establece las condiciones iníciales del programa: Librerías del
programa a utilizar,
velocidad de trasmisión de datos parámetros de,
establecimiento de pines de entrada y salida.
2. define las variables dato, cont.
3. Se crea una subrutina de interrupción, esta es un contador.
4. Se inicia el programa principal, habilitando las funciones del pic.
Selecciona los limites con los que se va a trabajar (de 0 a 255), habilita
las interrupciones internas y externas, usa flancos de subida y las
interrupciones están habilitas para todo el programa.
5. Luego se inicia una rutina que obtiene datos del pc. Mientras la variable
no sea igual a 47 (que es un número escogido que se envía desde el
matlab), mantendrá esa rutina.
6. Cuando se le envía el número 47 desde el matlab inicia la rutina de ir al
punto cero, es decir, se mueve hasta que el swich de final de carrera se
cierra y le envía un pulso al recibir este pulso el micro controlador envía
un valor al matlab que este reconoce y muestra que la mesa ha sido
calibrada.
7. De la misma forma se realiza el conteo de grados. Solamente difiere
en que el micro controlador al recibir la orden de moverse recibe también
el número de grados a moverse y realiza el conteo, una vez terminado
este conteo envía un valor al matlab que le indica que ya ha recorrido el
número de grados solicitado
69
4.3.2 Programación en matlab
La segunda parte del desarrollo de software denominada de toma y
análisis de datos es la encargada de tomar la señal de audio externa
transformarla a decibeles y almacenarla para su posterior análisis y
graficación.
Sin embargo para asegurar que las mediciones son correctas se debe
hacer una calibración del sistema tanto mecánico como el de captura de
señal. Con este fin se desarrollado un programa en matlab que posee
dos partes la primera es la de calibración del sistema y la segunda la de
toma y análisis de datos.
4.3.2.1 Calibración de la mesa (sistema mecánico):
A continuación se enumera la secuencia que sigue el programa
desarrollado en matlab para la parte de calibración de la parte mecánica
1. Definición de las variables aplicadas a la comunicación serial y los
parámetros asociados a ellas como: puerto com, velocidad de trasmisión
de datos, baudios, bits de datos, bit de parada, etc.
2. Una vez establecidos los parámetros de la comunicación, se procede a
abrir el puerto.
3. Se procede a escribir en el puerto un valor de tipo char previamente
programado en el pic, esto con el fin que se ejecute el programa del pic
correspondiente a la parte de calibración, luego se espera la respuesta
que viene desde el pic una vez cumplido el parámetro asociado al punto
cero, en este caso una señal que es enviada por el micro swich de final de
carrera.
4. Una vez es enviada la respuesta desde el pic al pc, se entiende que la
mesa esta en el punto cero asi que se cierra el puerto y se desactiva el
botón de calibrar mesa y aparece en la pantalla calibrado al punto cero
70
4.3.2.2 Calibración de audio
Al igual que con el programa anterior a continuación se enumera la
secuencia que sigue el programa desarrollado en matlab para la parte de
calibración de la parte de audio.
1. Se establecen los parámetros de matlab asociados al audio, Se crea
una entrada análoga que se comunique con la entrada análoga del pc, en
este caso nuestra tarjeta de sonido, seguidamente se configura la
frecuencia de muestreo y la duración, es decir, durante cuánto tiempo va
a muestrear. Para esto se cuenta con dos tipos de respuesta, típicas de
los medidores de nivel sonoro, rápido y lento (fast y slow), que
corresponden a 0.125 ms y a 1 s, respectivamente. En la parte de
calibración la el tipo de respuesta que viene por defecto es lenta.
2. Una vez definidos estos parámetros se da la orden de iniciar la
obtención de datos de audio. El sonido que ingresa a la tarjeta de audio
es ingresado al programa mediante el tolbox de matlab utilizando su
función de adquisición de datos.
3. Al adquirir la señal se estima el nivel del valor de voltajes en decibeles
por medio de
una serie de operaciones matemáticas
tales como: el
cálculo de la magnitud de una transformada rápida de Fourier, esto con el
fin de determinar los componentes frecuenciales de los datos adquiridos y
reducir
efectivamente el overhead computacional
sin necesidad de
utilizar filtros para el muestreo. Seguidamente se le suma un offset a los
datos para evitar que se tome el logaritmo de cero y se establece una
ecuación para que lo muestreado conserve las frecuencias según la teoría
de Nyquist.
71
4. Seguidamente se aplica un filtro de ponderación A bajo la siguiente
ecuación:
5. Aplicado el filtro de ponderación A
se halla la matriz traspuesta que
resulta y esta se multiplica por el valor obtenido del offset
6. Finalmente se estima el valor en dBA de los datos adquiridos mediante
una relación de parseval y se aplica la ecuación de estimación de db.
7. Si el nivel supera los 94 dba se activa el aceptar y se procede a la
siguiente parte, sino se activa un botón de intentar de nuevo.
Para realizar una correcta calibracion de audio se hace necesario utilizar
un pistofono pues este nos asegura que el nivel sera de 94db en 1k, el
usuario debe asegurarse que el nivel de entrada sea lo mas cercano
posible a los 94 db aproximadamente modificando los niveles de ganancia
de la tarjeta de audio, una vez realizada la correcta calibracion del
sistema si el usuario desea que la fuente tenga más nivel, debe modificar
el control de salida de la fuente y no el de ganancia del microfono.
72
Figura 49. Interfaz grafica de calibración del sistema
Cabe aclarar que durante las mediciones el usuario debe garantisar el
sonido continuo del ruido rosa.
4.3.2.3 Segunda parte: Toma y análisis de datos.
La parte de toma y análisis de datos, se compone de una GUI
desarrollada igualmente en matlab donde el usuario define los parámetros
para el desarrollo de las mediciones. Dichos parámetros son: el número
de grados a medir (360 grados por defecto), la resolución con una mínima
de 1 y una máxima de 15 el tipo de respuesta del sistema, slow o fast, con
una respuesta da 1.25 seg y 1 segundo respectivamente luego un botón
de inicio luego de cada medición aparece la grafica correspondiente en
diagrama polar y se activa un botón de graficas donde aparecen dos
ventanas diferentes de la graficas en polar y en escala logarítmica con el
fin de que el usuario tenga la opción de guardar las graficas.
73
Figura 50. Interfaz grafica de realización de la medición
74
5. PRESENTACIÓN Y ANÁLISIS DE RESULTADOS
Al finalizar el desarrollo de este proyecto el resultado obtenido es un
sistema mecánico manejado por computadora a través de una interfaz de
comunicación serial cuya función es permitir la medición del patrón polar
de altavoces con una resolución de hasta 1 grado, con soporte para
cabinas de gran tamaño.
Figura 51. Sistema mecánico.
Figura 52. Sistema de movimiento del motor.
75
Figura 53. Rodamientos De soporte.
Figura 54. Sistema de conteo de grados por optoacoplador de herradura.
Para corroborar el buen funcionamiento de la mesa se llevo a cabo una
serie de mediciones a una cabian EON 500. Las mediciones se realizaron
en la parte trasera del edificio Guillermo de Okham, mediante los métodos
tradicional y el desarrollado en este proyecto.
76
5.1 Medición Por El Método Tradicional
- Instrumental utilizado en el método tradicional:
•
Sonómetro Savantek con wind-screen.
•
Altavoz EON JBL autopotenciado.
•
Cable de línea con jack de ¼ y terminal tipo XLR.
•
Computadora portátil.
•
Software que resproduzca un ruido rosa.
•
Software del sonómetro.
•
Trípode soporte del altavoz.
•
Base para el sonómetro.
•
Metro
•
Transportador.
•
Palillos.
5.1.1 Montaje
Antes de tomar cualquier tipo de medida, se debe asegurar el perfecto
funcionamiento de los equipos y rectificar las conexiones. (Ver diagrama
de conexiones). Para realizar las mediciones fue necesario tener en
cuenta que la computadora produjera correctamente el ruido rosa. Así
mismo es necesario tener en cuenta que las mediciones se realizaron al
aire libre donde la temperatura era de aproximadamente 17ºC (290ºK) por
tanto la base donde se poso el trípode era el césped.
Luego se procedió a realizar las marcas para cada uno de los ángulos con
los cuales se iban a trabajar, es decir, de 10º partiendo desde el cono del
altavoz a 1m de distancia del mismo, por lo tanto para un círculo de 360º
corresponden a 36 puntos al igual que mediciones.
A continuación se enuncia toda la información respecto a las condiciones
en las cuales se encontraba el sonómetro para realizar las mediciones:
77
Header information:
Integration time def. ....... 5 s
--------------------------------------------
Repetition cycle ............ 1
Device type ................. SVAN
943A
Octave 1/1 lines ............ 10+3
Octave 1/1 filter ........... Lin
Serial No. .................. 5193
Octave 1/1 in buffer ........ ON
Internal software version ... 5.11
Number of histograms ........
3+13
File system version ......... 5.11
Calibration type ............
Sensitivity
-------------------------------------------Original file name .......... 000
Calibration time ............ 11:46'28
Measurement hour ............
12:43'12
Calibration date ............
06/05/25
Measurement day .............
06/05/25
Rotation measurement ........
OFF
Device function .............
OCTAVE 1/1
-------------------------------------------------------------------
--------------------------------------------
Profile:
Title text:
#1
#2
#3
-------------------------------------------------------------------
-------------------------------------------Input ....................... Microphone
Weighting filter ............ Lin
A
C
Mic. polarization ........... 0 V
Detector type ............... Slow
Slow
Slow
Measurement range ........... 130
dB
Buffer contents definition .. RMS
RMS
RMS
Leq integration ............. Linear
Trig. mode .................. Off
Calibration factor .......... 0 dB
0 dB
0 dB
Start delay ................. 1 s
78
5.1.2 DIAGRAMA DE CONEXIONES
Figura 55. Diagrama de conexiones del método tradicional.
Una
vez
realizadas
las
conexiones
respectivas
se
procedió
a
experimentar y a tomar datos los respectivos datos, pero en primer lugar
se tomaron los datos del ruido ambiente para que así se reproduzca un
ruido rosa que este 40dB por encima del ruido de fondo el cual tenía las
siguientes características:
f[Hz]
Lev[dB]
f[Hz]
Lev[dB]
Lev[dB]
31,5
52,9
1000,0
49,1
TOT_A 53,5
63,0
51,8
2000,0
42,5
TOT_C 61,8
125,0
55,8
4000,0
36,8
250,0
57,9
8000,0
33,0
500,0
56,2
16000,0
34,2
TOT_Lin 63,1
Tabla 2. Resultados de las mediciones de ruido de fondo, realizadas con el sonómetro.
79
En donde se puede observar que hay una mayor atenuación en las
frecuencias bajas.
Luego se procedió a tomar la primera medición correspondiente a 0º
teniendo como referencia el cono del altavoz, después se hicieron las
realizaron las respectivas mediciones en cada una de las marcas hasta
finalizar en el mismo punto de partida.
Cada una de las mediciones fue grabada en el mismo sonómetro para
cada una de las mediciones para luego ser descargada toda la
información en un PC, en el cual fue posible extraer la información.
Por último cabe aclarar que las mediciones fueron hechas en un campo
abierto
y todas las medidas fueron hechas con la misma potencia
producida por la computadora portátil.
5.1.3 Resultados
De las mediciones realizadas con sonómetro cada 10 grados según el
método tradicional se obtuvieron los siguientes resultados
ANGULO
dBA
120º
95,3
250
96,8
0º
112,6
130
94,6
260
96,6
10
112,2
140º
94
270º
98,7
20
111,7
150º
93,3
280
101,2
30º
108,9
160
93,8
290
102,6
40
107,6
170
94,7
300º
104,3
50
106,9
180º
95,4
310
107,3
60º
104,4
190
96,2
320
109,2
70
102,4
200
96,9
330º
110,2
80
101,8
210º
97,4
340
110,9
90º
99
220
97,4
350
111,5
100
97,4
230
97,2
360º
112
110
96,3
240º
97
Tabla 3. Resultados de la medición del patrón polar por medio del método tradicional.
80
SPL DBA
330º
320º
350º117
340º
0º
10º
20º
30º
40º
112
310º
50º
107
300º
60º
102
290º
70º
280º
97
80º
270º
92
90º
260º
SPL DBA
100º
250º
110º
240º
120º
230º
220º
210º
130º
200º
190º
170º
180º
160º
140º
150º
Figura 56. Diagrama polar resultante de las mediciones por el método tradicional.
Modificando la escala en Excel de un valor mínimo de 92 y uno máximo
de 117 se logra apreciar la aproximación al patrón cardiode de la cabina
EON500 de jbl.
5.2 Mediciones utilizando la mesa giratoria automática
Para el desarrollo de las mediciones con la mesa giratoria automática se
utilizó el siguiente instrumental:
•
Micrófono beringer ECM8000 .
•
Altavoz EON JBL autopotenciado.
•
Cable de línea con jack de ¼ y terminal tipo XLR.
•
Cables Para micrófono.
•
Computadora portátil.
•
Interfaz de audio Maudio Fast Track Pro
81
•
Pistófono.
•
Mesa giratoria
•
Software desarrollado en matlab para las mediciones de patrón
polar.
•
Interfaz de comunicación entre la mesa giratoria y el software.
•
Base para el micrófono.
•
Metro
•
Ruido rosa en loop.
5.2.1 Montaje
El montaje se realizo en la parte trasera del edificio Guillermo de
Ockhman al aire libre, se utilizo una mesa convencional para colocar el
sistema mecánico a una altura de 1,20 metros, el micrófono se ubico a 1
metro del centro de la fuente.
5.2.2 Diagrama de conexiones:
Figura 57. Diagrama de conexiones por el método de sistema de mesa giratoria automática.
82
Luego de realizar las conexiones necesarias se procede a la calibración
del sistema tanto mecánico como de audio.
Figura 58. Montaje del sistema.
El sistema mecánico se calibra como se ha mencionado anteriormente,
por otro lado el sistema de audio se calibra con el uso del pistófono, con
un valor resultante de
94.253 db. Con este valor de calibración
procede a realizar las mediciones
Figura 59. Método de calibración por medio del pistófono.
83
se
Figura 60. Resultado en la calibración del sistema para realización de las mediciones.
Figura 61. Montaje dispuesto para la realización de las mediciones.
84
5.2.3 Resultados
Las mediciones se realizaron cada 10 grados con 3 mediciones por punto
y una respuesta slow. Según las mediciones realizadas en con el método
propuesto en este proyecto se obtienen los siguientes resultados:
Figura 62. Resultado en la interfaz gráfica luego de realizar las mediciones cada 10 grados.
Esta es la tabla de los datos obtenidos con el sistema de mesa giratoria
automática:
Angulo
dBA
80º
82,376
170º
76,4388
0º
86,9354
90º
81,5833
180º
76,0535
10º
86,633
100º
80,761
190º
76,4144
20º
86,2953
110º
79,9775
200º
77,1109
30º
85,7893
120º
79,2169
210º
77,1348
40º
85,2345
130º
78,5177
220º
77,8852
50º
84,5552
140º
77,887
230º
78,6119
60º
83,866
150º
77,3325
240º
79,3416
70º
83,1288
160º
76,8569
250º
80,0796
85
260º
81,8242
300º
84,0592
340º
86,2007
270º
82,5909
310º
84,9326
350º
86,6755
280º
82,7823
320º
85,223
360º
86,9784
290º
83,2064
330º
85,7494
Tabla 4. Resultados de la medición del patrón polar por medio del método de mesa giratoria automática
Cuya gráfica resultante en matlab es:
Figura 63. Grafica polar resultante de las mediciones realizadas cada 10 grados
En la anterior gráfica se aprecia un patrón tipo omnidireccional puesto
que la variación entre el punto máximo y mínimo es de +/- 10dB y la
escala no permite apreciar el patrón cardioide; sin embargo al cargar los
datos en Excel y modificando la escala de un mínimo de 75 y un máximo
de 86 resulta la siguiente grafica.
86
SPL dBA
350º87
340º
330º
85
320º
310º
83
300º
290º
0º
10º
20º
30º
40º
50º
60º
81
70º
79
280º
77
80º
270º
75
90º
260º
SPL dBA
100º
250º
110º
240º
230º
220º
210º
200º
190º
120º
180º
130º
140º
150º
160º
170º
Figura 64. Grafica polar resultante de las mediciones por el método de mesa giratoria automática
disminuyendo la escala.
Comparando la grafica de los métodos tradicional y el desarrollado con el
sistema de medición automática se nota una mejora en el resultado
obtenido por los dos métodos, con lo cual se corrobora que la mesa si
funciona y mejora notablemente la gráfica del patrón polar.
5.3 Mediciones Cada Grado
Del mismo modo, es decir, con el mismo montaje y el mismo nivel de
calibración se realizó las mediciones cada grado cuyos resultados
obtenidos son los siguientes.
87
Figura 65. Interfaz principal en mediciones de resolución 1º
Al igual que con la grafica anterior la escala no permite ver claramente el
patrón polar correcto por este motivo se copian los datos al Excel y
mediante la reducción de escala se obtiene la siguiente grafica:
Figura 66. Grafica de matlab resultante de las mediciones con resolución 1º
88
Spl dBA
341
337
333
329
325
321
317
313
309
305
301
297
293
353 357
90.000
345 349
1
5
9
13 17
85.000
281
25
29
33
37
41
45
49
53
57
61
65
69
80.000
75.000
73
289
285
21
77
70.000
81
85
277
273
89
65.000
269
93
Spl dBA
97
265
101
261
105
257
109
253
249
245
241
237
233
229
225
221
217
213
209
205
201
197 193
189 185
181
177 173 169
165
113
117
121
125
129
133
137
141
145
149
153
157
161
Figura 67. Grafica patrón polar en Excel con los datos obtenidos en la medición de 1º
La escala se redujo con un valor mínimo de 72 y un máximo de 88. Como
resultado de la gran cantidad de datos adquiridos la gráfica se puede
observar de manera mucho más clara y el patrón cardioide se hace
realmente visible.
5.4 Consideraciones
El sistema de la mesa giratoria automática satisface las expectativas del
proyecto según la hipótesis planteada, sin embargo no hay que dejar a un
lado los errores sistemáticos que surgen durante este tipo de mediciones
bien sean producidos por los instrumentos o por las personas que se
encuentran realizando las mediciones.
El sistema de medición de la mesa giratoria automática necesita la
presencia del usuario durante las mediciones pues es necesario estar
moviendo los cables de audio y corriente de la cabina, con el fin que no se
enreden o interfieran en el sistema, esto logra afectar la medición pues se
produce una absorción por parte del usuario lo que no permite que en ese
89
lapso de tiempo la medición sea cien por ciento confiable, por otro lado la
calidad de los equipos de medición así como los cables y conectores
afectan la medición pues es posible que introduzcan ruido al sistema.
El matlab tiene el inconveniente de no permitir adecuar la escala del
diagrama polar manualmente, sino que lo hace el mismo de forma
automática por eso es necesario trasladar los datos al Excel con el fin de
modificar la escala y observar con claridad el patrón polar medido.
Por último el ambiente de medición no es el ideal, como lo sería en una
cámara anecóica, y diferentes ruidos del ambiente ya sean constantes o
impulsivos logran afectar en cierta medida el resultado final de las
mediciones.
90
6. CONCLUSIONES
Los altavoces son la parte más importante en la cadena de reproducción
del sonido, para seleccionarlos es necesario tener en cuenta muchos
parámetros asociados a estos, entre ellos uno de los más importantes es
su directividad, información que no siempre es suministrada por los
fabricantes; con el uso de la mesa giratoria automática el usuario
interesado en conocer dicho patrón de directividad ve facilitada su labor,
puesto que el sistema puede considerarse automático, donde la
intervención del usuario es mínima.
En una primera evaluación, se ha comprobado y validado el uso de la
mesa giratoria automática como alternativa a las mediciones tradicionales
del patrón polar de altavoces, reduciendo en gran medida los errores que
se producen en este tipo de mediciones cuando estas se desarrollan por
dicho método.
El sistema cumple a cabalidad con las expectativas propuestas al inicio de
este proyecto, posee los parámetros ajustables asociados a recorrido,
resolución número de mediciones, almacenamiento y gráfica polar,
además que llega a soportar hasta 50kg y tiene una resolución mínima de
un grado.
Aunque el sistema mejora notablemente las mediciones de directividad
comparándolas con el sistema tradicional, se debe tener en cuenta que
los factores externos, como el ambiente de medición y el ruido de fondo,
entre otros, que muchas veces son ajenos al usuario, afectan de alguna
manera el resultado de estas mediciones.
Por otro lado las falencias que posee el sistema no se deben ocultar ni
pasarlas por alto. El peso del sistema mecánico es una de ellas, puesto
que el sistema pesa en conjunto 30 kg aproximadamente y se hace
dificultoso su desplazamiento, no obstante lo que parece ser una
91
desventaja puede ser a la vez una fortaleza ya que al ser tan robusto es
difícil que se dañe o sufra averías a causa de caídas o golpes. El tiempo
de giro total al medir con una resolución de un grado llega a ser bastante
extenso con un tiempo aproximado de 2 horas realizando una sola
medición en cada punto, es decir que puede extenderse bastante si se
realizan más mediciones en cada punto.
La interdisciplinariedad en el desarrollo de este sistema revela la
capacidad y necesidad que tiene el ingeniero de sonido de reunir e
implementar aplicaciones de distintas áreas de la ciencia como lo son la
mecánica, la electrónica y la programación, complementándose de la
mejor manera en el desarrollo de su vida profesional.
92
7. RECOMENDACIONES
El sistema de medición de la mesa giratoria automática puede llegar a ser
considerado como un prototipo, pues no llega a compararse con los
desarrollados por empresas como Brüel & Kjaer, outline o incluso DAS.
Sin embargo es un campo que tiene grandes posibilidades de exploración
e investigación.
Se recomienda el desarrollo y la aplicación de filtros de octava y tercio de
octava en el programa de toma y análisis de datos con el fin de hacer este
programa más completo y que automáticamente pueda calcular muchos
más parámetros como lo son el índice de directividad, el factor Q de la
fuente y la potencia entre otros.
Se recomienda el diseño de un dispositivo que evite el estar moviendo los
cables de audio y corriente de la cabina y así disminuir los posibles
errores de medición causados por la persona que realiza esta acción.
93
8. BIBLIOGRAFÍA
Beranek Leo, Acústica, Tercera edición, 975 Memorial Drive Suite 804
Cambridge, MA 02138.
Borwick John, Loudspeaker and Headphone Handbook, Focal Press.
Eargle John, Manual de Referencia para el Diseño de Sistemas de Sonido
de JBL.
F. EVERETS, Alton, Master Hand Book Of Acoustics, McGraw-Hill
GARCÍA DE JALÓN Javier, José Ignacio Rodríguez, Jesús Vidal Aprenda
Matlab 7.0 como si estuviera en primero, Escuela Técnica Superiorde
Ingenieros Industriales.
LAWRENCE E. KINSLER, Austin R. Frey y ALAN B. COPPENS, James
V. Sanders. Fundamentos de acústica, México, Editorial Limusa, 1988.
RECUERO LÓPEZ, Manuel. Acústica, Ec. Universitaria Ingeniería
Técnica de Telecomunicaciones. Madrid 1983.
www.matpic.com
94
www.mathworks.com
http://proyectoselectronics.blogspot.com/2008/09/optoacoplador-que-es-ycomo-funcionan.html
95
ANEXOS
ANEXO A
Características Del Pic 16F877A
CARACTERÍSTICAS
16F877
Frecuencia máxima
DX-20MHz
Memoria de programa flash palabra de 14 bits
8KB
Posiciones RAM de datos
368
Posiciones EEPROM de datos
256
Puertos E/S
A,B,C,D,E
Número de pines
40
Interrupciones
14
Timers
3
Módulos CCP
2
Comunicaciones Serie
MSSP, USART
Comunicaciones paralelo
PSP
Líneas de entrada de CAD de 10 bits
Juego de instrucciones
8
35 Instrucciones
Longitud de la instrucción
14 bits
Arquitectura
Harvard
CPU
Risc
Canales Pwm
2
Pila Harware
-
Ejecución En 1 Ciclo Máquina
-
96
ANEXO B
Descripción de los pines del microcontrolador PIC 16F877A
TIPO
DE
NOMBRE DEL
PIN
PI
N
TIPO
OSC1/CLKIN
13
I
ST/MO
S
Entrada del oscilador de cristal /
Entrada de señal de reloj externa
OSC2/CLKOUT
14
O
-
Salida del oscilador de cristal
MCLR/Vpp/THV
1
I/P
ST
Entrada del Master clear (Reset)
o entrada de voltaje de
programación o modo de control
high voltaje test
RA0/AN0
2
I/O
TTL
RA1/AN1
3
I/O
TTL
RA2/AN2/ Vref-
4
I/O
TTL
RA3/AN3/Vref+
5
I/O
TTL
RA4/T0CKI
6
DESCRIPCIÓN
BUFFE
R
I/O
PORTA es un puerto I/O
bidireccional
RAO: puede ser salida analógica
0
RA1: puede ser salida analógica
1
RA2: puede ser salida analógica
2 o referencia negativa de voltaje
RA3: puede ser salida analógica
3 o referencia positiva de voltaje
ST
RA4: puede ser entrada de reloj
el timer0.
RA5/SS/AN4
7
I/O
TTL
RA5: puede ser salida analógica
4 o el esclavo seleccionado por
el puerto serial síncrono.
PORTB es un puerto I/O
bidireccional. Puede ser
programado todo como entradas
RB0 pude ser pin de interrupción
externo.
97
RBO/INT
33
I/O
TTL/ST
RB1
34
I/O
TTL
RB2
35
I/O
TTL
RB3/PGM
36
I/O
TTL
RB3: puede ser la entada de
programación de bajo voltaje
Pin de interrupción
Pin de interrupción
Pin de interrupción. Reloj de
programación serial
RB4
37
I/O
TTL
RB5
38
I/O
TTL
RB6/PGC
39
I/O
TTL/ST
RB7/PGD
40
I/O
TTL/ST
RCO/T1OSO/T1
CKI
RC1/T1OS1/CC
P2
15
16
I/O
I/O
PORTC es un puerto I/O
bidireccional
ST
RCO puede ser la salida del
oscilador timer1 o la entrada de
reloj del timer1
ST
RC1 puede ser la entrada del
oscilador timer1 o salida PMW 2
RC2/CCP1
17
I/O
ST
RC3/SCK/SCL
18
I/O
ST
RC4/SD1/SDA
23
RC2 puede ser una entrada de
captura y comparación o salida
PWN
RC3 puede ser la entrada o
salida serial de reloj síncrono
para modos SPI e I2C
I/O
ST
RC4 puede ser la entrada de
datos SPI y modo I2C
RC5 puede ser la salida de datos
SPI
RC5/SD0
24
I/O
ST
RC6/Tx/CK
25
I/O
ST
RC6 puede ser el transmisor
asíncrono USART o el reloj
síncrono.
RC7 puede ser el receptor
98
RC7/RX/DT
26
I/O
ST
asíncrono USART o datos
síncronos
PORTD es un puerto
bidireccional paralelo
RD0/PSP0
19
I/O
ST/TTL
RD1/PSP1
20
ST/TTL
RD2/PSP2
21
RD3/PSP3
22
RD4/PSP4
27
I/O
I/O
I/O
I/O
I/O
I/O
I/O
RD5/PSP5
28
ST/TTL
RD6/PSP6
29
ST/TTL
RD7/PSP7
30
ST/TTL
REO/RD/AN5
8
I/O
ST/TTL
ST/TTL
ST/TTL
ST/TTL
PORTE es un puerto I/O
bidireccional
REO: puede ser control de
lectura para el puerto esclavo
paralelo o entrada analógica 5
RE1/WR/AN
9
I/O
ST/TTL
RE1: puede ser escritura de
control para el puerto paralelo
esclavo o entrada analógica 6
RE2: puede ser el selector de
control para el puerto paralelo
esclavo o la entrada analógica 7.
RE2/CS/AN7
10
I/O
ST/TTL
Vss
12.
31
P
-
Referencia de tierra para los
pines lógicos y de I/O
Vdd
11.
32
P
-
Fuente positiva para los pines
lógicos y de I/O
NC
-
-
-
No está conectado internamente
99
ANEXO C
Código de programación del microcontrolador PIC16f877a
#include <16F877a.h>
//#fuses xt,NOWDT,NOLVP,PUT
#use delay(clock=4000000)
#use rs232(baud=2400, xmit=PIN_c6, rcv=PIN_c7, STREAM=1)
#define pc 1
int dato,cont;
#int_ext
void interrupcion()
{
cont=cont+1;
}
void main( void )
{
set_tris_a(0);
set_tris_b(255);
enable_interrupts(INT_EXT);
ext_int_edge( L_TO_H );
enable_interrupts(GLOBAL);
while(true)
{
no:
dato=fgetc(pc);
if (dato>50)
{
goto no;
100
}
else if(dato==47)
{
goto puntocero;
}
output_high(PIN_a0);
cont=0;
while(cont<dato)
{
}
output_low(PIN_a0);
fputc(64,pc);
dato=0;
}
puntocero:
while (input(PIN_b7)==0)
{
output_high(PIN_a0);
}
output_low(PIN_a0);
fputc(64,pc);
goto no;
}
101
ANEXO D
Código de programación de la interfaz grafica de usuario desarrollada en
matlab para la etapa de calibración.
function varargout = Calibracion_Del_Sistema(varargin)
% CALIBRACION_DEL_SISTEMA M-file for
Calibracion_Del_Sistema.fig
%
CALIBRACION_DEL_SISTEMA, by itself, creates a
new CALIBRACION_DEL_SISTEMA or raises the existing
%
singleton*.
%
%
H = CALIBRACION_DEL_SISTEMA returns the handle
to a new CALIBRACION_DEL_SISTEMA or the handle to
%
the existing singleton*.
%%
CALIBRACION_DEL_SISTEMA('CALLBACK',hObject,eventData,ha
ndles,...) calls the local
%
function named CALLBACK in
CALIBRACION_DEL_SISTEMA.M with the given input
arguments.
%
%
CALIBRACION_DEL_SISTEMA('Property','Value',...)
creates a new CALIBRACION_DEL_SISTEMA or raises the
%
existing singleton*. Starting from the left,
property value pairs are
%
applied to the GUI before
Calibracion_Del_Sistema_OpeningFunction gets called.
An
%
unrecognized property name or invalid value
makes property application
%
stop. All inputs are passed to
Calibracion_Del_Sistema_OpeningFcn via varargin.
%
%
*See GUI Options on GUIDE's Tools menu. Choose
"GUI allows only one
%
instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help
Calibracion_Del_Sistema
% Last Modified by GUIDE v2.5 28-Oct-2008 04:25:05
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name',
mfilename, ...
'gui_Singleton', gui_Singleton, ...
102
'gui_OpeningFcn',
@Calibracion_Del_Sistema_OpeningFcn, ...
'gui_OutputFcn',
@Calibracion_Del_Sistema_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback',
[]);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State,
varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before Calibracion_Del_Sistema is
made visible.
function Calibracion_Del_Sistema_OpeningFcn(hObject,
eventdata, handles, varargin)
movegui(hObject,'center')%CENTRAR LA GUI
set(handles.Audio,'Enable','on');
set(handles.Nuevo,'Enable','off');
set(handles.Listo,'Enable','on');
%Abrir puerto serie___
guidata(hObject, handles);
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes Calibracion_Del_Sistema wait for user
response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the
command line.
function varargout =
Calibracion_Del_Sistema_OutputFcn(hObject, eventdata,
handles)
% varargout cell array for returning output args (see
VARARGOUT);
% hObject
handle to figure
103
% eventdata reserved - to be defined in a future
version of MATLAB
% handles
structure with handles and user data (see
GUIDATA)
% Get default command line output from handles
structure
varargout{1} = handles.output;
% --- Executes on button press in Mesa.
function Mesa_Callback(hObject, eventdata, handles)
SerPIC = serial('COM4');
set(SerPIC,'BaudRate',2400);
set(SerPIC,'DataBits',8);
set(SerPIC,'Parity','none');
set(SerPIC,'StopBits',1);
set(SerPIC,'FlowControl','none');
fopen(SerPIC);
PC=47;
pc=char(PC);
fclose(SerPIC);
fopen(SerPIC);
fprintf(SerPIC,'%c',pc);%Envía en código ASCII
a=0;
while a==0
a=fscanf(SerPIC);
a=get(SerPIC,'ValuesReceived');
end
fclose(SerPIC)
clear SerPIC
set(handles.Audio,'Enable','on'); pause(0.1)
set(handles.Mesa,'Enable','off'); pause(0.1)
set(handles.Mesa,'string','CALIBRADO AL PUNTO
CERO');
% --- Executes on button press in Audio.
function Audio_Callback(hObject, eventdata, handles)
for n=1:1:2
handles.AI = analoginput('winsound');% sirve para
obtener datos de la tarjeta de sonido
channel = addchannel(handles.AI,1);
handles.Fs=44100;
handles.responseType = 'slow';
% Set tasa de muestreo.
set(handles.AI,'SampleRate',handles.Fs);
Fs = get(handles.AI,'SampleRate');
if strcmp(handles.responseType,'slow')
104
duration = 1.0;
else
duration = 0.125;
end
N = ceil(duration*handles.Fs);
N = 2^nextpow2(N);
% Set samples por trigger.
set(handles.AI,'SamplesPerTrigger',N);
N = get(handles.AI,'SamplesPerTrigger');
% Set opciones de adquisicion de Datos.
set(handles.AI,'TriggerType','Manual');
set(handles.AI,'TriggerRepeat',1);
set(handles.AI,'TimerPeriod',duration/4);
set(handles.Audio,'Enable','off'); pause(0.1)
set(handles.Audio,'string','CALIBRANDO');
Fs=handles.Fs;
b=[];
% soundsc(R,Fs);
% Comienza la adquisicion.
start(handles.AI); trigger(handles.AI);
tic
x = getdata(handles.AI);
toc
X = abs(fft(x));
% Suma un offset para evitar que tome el log de cero.
X(find(X == 0)) = 1e-17;
% Conserve frecuencias debajo de la tasa de Nyquist.
f = (Fs/length(X))*[0:(length(X)-1)];
ind = find(f<Fs/2); f = f(ind); X = X(ind);
% Note: A quite location will be ~55 dBA.
C = 72;
% Estima el valor dBSPL usando la ecuacion de Parseval.
A = Filtro_A(f);
X = A'.*X;
EnergiaTotal = sum(X.^2)/length(X);
meanEnergia = EnergiaTotal/((1/Fs)*length(x));
dBA= 10*log10(meanEnergia)+C;
stop(handles.AI);
delete(handles.AI)
clear handles.AI
b=[b dBA];
end
m2 = mean(b);
105
%M=(m2-m1);
M=94.253,
set(handles.Audio,'Enable','on'); %HABILITAR EL BOTÓN
if M>=94
warndlg('Excelente')
set(handles.dB,'string',[num2str(M) 'dB']);
set(handles.Listo,'Enable','on'); pause(0.1)
else
errordlg('error');
set(handles.dB,'string',M);
set(handles.Audio,'string','Intentar De Nuevo');
set(handles.Listo,'Enable','off'); pause(0.1)
set(handles.Audio,'Enable','off'); pause(0.1)
set(handles.Nuevo,'Enable','on'); pause(0.1)
return
end
% --- Executes on button press in Listo.
function Listo_Callback(hObject, eventdata, handles)
Tesis_FINAL
close
% hObject
handle to Listo (see GCBO)
% eventdata reserved - to be defined in a future
version of MATLAB
% handles
structure with handles and user data (see
GUIDATA)
% --- Executes on button press in Nuevo.
function Nuevo_Callback(hObject, eventdata, handles)
%IN=digitalio('parallel','LPT1');
% dato2=addline(IN,8:12,'in');
% dato3=getvalue(dato2)
%
dato4=16*dato3(1)+8*dato3(2)+4*dato3(3)+2*dato3(4)+1*~d
ato3(5)
% if dato4==29
set(handles.Audio,'Enable','on'); pause(0.1)
set(handles.Audio,'string','Calibrar Audio');
%else
set(handles.Audio,'Enable','on'); pause(0.1)
set(handles.Audio,'string','Calibrar Audio');
set(handles.Mesa,'Enable','on'); pause(0.1)
% end
% hObject
handle to Nuevo (see GCBO)
106
% eventdata reserved - to be defined in a future
version of MATLAB
% handles
structure with handles and user data (see
GUIDATA)
107
ANEXO E
Código de programación de la interfaz grafica de usuario desarrollada en
matlab para la etapa toma y análisis de datos.
function varargout = Tesis_FINAL(varargin)
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name',
mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @Tesis_FINAL_OpeningFcn, ...
'gui_OutputFcn', @Tesis_FINAL_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback',
[]);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State,
varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- CONDICIONES INICIALES DE LA GUI.
function Tesis_FINAL_OpeningFcn(hObject, eventdata,
handles, varargin)
% LOS DATOS QUE SE MUESTRAN A CONTINUACIÓN SON LOS
DATOS POR DEFECTO DE LA
% GUI. ESTOS VARIARÁN UNA VEZ QUE EL USUARIO INGRESE
OTROS DATOS
movegui(hObject,'center')%CENTRAR LA GUI
handles.respuesta='slow';%CONDICIONE INICIAL (CI) PARA
EL TIPO DE RESPUESTA
handles.NUM_MED=12;%CI PARA EL NÚMERO DE MEDICIONES
handles.RESO=12;%CI PARA LA RESOLUCIÓN
handles.grados=360;%CI PARA EL NÚMERO DE GRADOS
%---------------------------------------------------RHO=100;
THETA=linspace(0,2*pi,length(RHO));
polar(THETA,RHO);
set(handles.inicio,'Enable','off');
set(handles.Resolucion,'Enable','off');
set(handles.MPP,'Enable','off');
set(handles.GraficaP,'Enable','off');
set(handles.GraficaL,'Enable','off');
%-----------------------------------------------%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
108
%--------%______________________________%
%FIN DE CONDIONES INICIALES
handles.output = hObject;
guidata(hObject, handles);
% --- Outputs from this function are returned to the
command line.
function varargout = Tesis_FINAL_OutputFcn(hObject,
eventdata, handles)
varargout{1} = handles.output;
%-----------------------------------------------------------------------%SELECCIONAR EL PUERTO COM
% --- Executes on selection change in puerto.
function puerto_Callback(hObject, eventdata, handles)
Puerto = get(hObject,'String');%OBTENER TODO EL STRING
DEL POP-UP MENU
com= Puerto{get(hObject,'Value')};
com=str2double(com);
handles.puerto=com;%EXPORTAR LA VARIABLE A OTRA FUNCIÓN
guidata(hObject,handles);%ACTUALIZA DATOS
% --- Executes during object creation, after setting
all properties.
function puerto_CreateFcn(hObject, eventdata, handles)
% hObject
handle to puerto (see GCBO)
% eventdata reserved - to be defined in a future
version of MATLAB
% handles
empty - handles not created until after
all CreateFcns called
% Hint: popupmenu controls usually have a white
background on Windows.
%
See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'),
get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
%------------------------------------------------------------------------%------------------------------------% --- SELECTOR DEL NÚMERO DE GRADOS.
function Grados_Callback(hObject, eventdata, handles)
GR = get(hObject,'String');%OBTENER TODO EL STRING DEL
POP-UP MENU
GR= GR{get(hObject,'Value')}; %OBTENER SOLO EL STRING
SELECCIONADO
% GR=get(handles.Grados,'value')
109
grados=str2double(GR);
handles.grados=grados;%EXPORTAR LA VARIABLE A OTRA
FUNCIÓN
guidata(hObject,handles);%ACTUALIZA DATOS
set(handles.Resolucion,'Enable','on');
% -----------------------------------------------------------------------% --- BOTON DE RESOLUCION
% --- Executes on button press in Resolucion.
function Resolucion_Callback(hObject, eventdata,
handles)
s=inputdlg('DATO','Resolucion');
Res=cell2mat(s);
Rs=str2double(Res);%Transformar a formato double
% reso=get(handles.reso,'value'); %Almacenar valor
ingresado
% Res= str2double(reso); %Transformar a formato double
if Rs<1 || Rs>90 ||isnan(Rs)%
errordlg('Valor fuera del rango')
return
end
set(handles.RR,'String',Rs)
handles.RS=Rs;%EXPORTAR EL DATO A OTRA FUNCIÓN
guidata(hObject,handles); %Salvar datos de la
aplicación
set(handles.MPP,'Enable','on');
%------------------------------------------------------------------------%BOTON DE NUMERO DE MEDICIONES
% --- Executes on button press in MPP.
function MPP_Callback(hObject, eventdata, handles)
Nm=inputdlg('DATO','Numero de Mediciones');
Med=cell2mat(Nm);
Med=str2double(Med);%Transformar a formato double
% reso=get(handles.reso,'value'); %Almacenar valor
ingresado
% Res= str2double(reso); %Transformar a formato double
if Med<1 || Med>6 ||isnan(Med)%
errordlg('Inserte un número entre 1 y 6')
return
end
set(handles.NN,'String',Med)
handles.NM=Med;%EXPORTAR DATOS A OTRA FUNCIÓN
guidata(hObject,handles); %ESTA LÍNEA SIEMPRE VA CUANDO
USAMOS "HANDLES" PARA
% EXPORTAR DATOS A OTRAS FUNCIONES.
set(handles.inicio,'Enable','on');
% ----------------------------------------------------------------------110
% --- SELECTOR DEL TIPO DE RESPUESTA
function uipanel2_SelectionChangeFcn(hObject,
eventdata, handles)
if hObject==handles.rapido
handles.respuesta='fast';
else
handles.respuesta='low';
end
guidata(hObject,handles)%ESTA LÍNEA SIEMPRE VA CUANDO
USAMOS "HANDLES" PARA
% EXPORTAR DATOS A OTRAS FUNCIONES.
% -----------------------------------------------------------------------% --- BOTON DE INICIO
function inicio_Callback(hObject, eventdata, handles)
%--------------------------------------------------------------%FUNCIONES PARA EL MOTOR
SerPIC = serial('handles.puerto');
set(SerPIC,'BaudRate',2400);
set(SerPIC,'DataBits',8);
set(SerPIC,'Parity','none');
set(SerPIC,'StopBits',1);
set(SerPIC,'FlowControl','none');
fopen(SerPIC);
%______________________________________________________
___
Med=handles.NM; %LLAMAR LOS DATOS DE LAS OTRAS
FUNCIONES
Rs=handles.RS;
%LLAMAR LOS DATOS DE LAS OTRAS
FUNCIONES
G=handles.grados;%LLAMAR LOS DATOS DE LAS OTRAS
FUNCIONES
responseType=handles.respuesta;%TIPO DE RESPUESTA
NM=Med;
%delay=10;
%delay2=0.470;
clc
Fs=44100;
bits=16;
v=[];y=[];z=[];w=[];c=0;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
111
%%%_----BUSCAR PUNTO CERO----------%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%
%-----------------------%PUERTO SERIAL%---------------------------------Pos=0;
rs=char(Rs);
%fprintf(SerPIC,'%c',char(rs));%Envía en código ASCII
%fprintf(SerPIC,'%s','rs');%Envía un string
for n=0:Rs:G-Rs
fclose(SerPIC);
fopen(SerPIC);
fprintf(SerPIC,'%c',rs);%Envía en código ASCII
a=0;
while a==0
a=fscanf(SerPIC);
a=get(SerPIC,'ValuesReceived');
end
%--------------------------------------------------------------------------------------%___________________SONIDO________________________
for q=1:1:NM;
AI = analoginput('winsound');% sirve para
obtener datos de la tarjeta de sonido%
addchannel(AI,1);
%responseType = 'slow';
% Set tasa de muestreo.
set(AI,'SampleRate',Fs);
Fs = get(AI,'SampleRate');
% Determina el tamaño de la ventana para la
FFT.
if strcmp(responseType,'slow')
duration = 1.0;
else
duration = 0.125;
end
N = ceil(duration*Fs);
N = 2^nextpow2(N);
% Set samples por trigger.
set(AI,'SamplesPerTrigger',N);
%N = get(AI,'SamplesPerTrigger');
112
% Set opciones de adquisicion de Datos.
set(AI,'TriggerType','Manual');
set(AI,'TriggerRepeat',1);
set(AI,'TimerPeriod',duration/4);
% Comienza la adquisicion.
start(AI); trigger(AI);
tic
x = getdata(AI);
toc
% Calcula magnitud de la FFT.
X = abs(fft(x));
% Suma un offset para evitar que tome el log de
cero.
X(find(X == 0)) = 1e-17;
% Conserve frecuencias debajo de la tasa de
Nyquist.
f = (Fs/length(X))*[0:(length(X)-1)];
ind = find(f<Fs/2); f = f(ind); X = X(ind);
C = 72;
% Aplica filtro para la ponderacion dBA.
A = Filtro_A(f);
Y = A'.*X;
% Estima el valor dBA usando la ecuacion de
Parseval.
EnergiaTotal = sum(Y.^2)/length(Y);
meanEnergia = EnergiaTotal/((1/Fs)*length(x));
dBA = 10*log10(meanEnergia)+C;
% Estimacion del nivel en db
dB = 20*log10(X);
stop(AI);
delete(AI)
clear AI
end
Pos=Pos+Rs;
v=[v dB];
y=[y dBA];
M1 = mean(v);
M2 = mean(y);
z=[z, M1];
w=[w, M2];
end
fclose(SerPIC);
113
clear SerPIC;
%
save('x_DATA','x');
save('dB_DATA','v');
save('dBA_DATA','y');
save('M1_DATA','M1');
save('M2_DATA','M2');
save('z_DATA','z');
save('w_DATA','w');
%%%%%%GRAFICA POLAR%%%%%%%
r_1=v;
RHO_1=r_1;
THETA_1=linspace(0,2*pi,length(RHO_1));
r_2=y;
RHO_2=r_2;
THETA_2=linspace(0,2*pi,length(RHO_2));
hold on
polar(THETA_1,RHO_1);
polar(THETA_1,RHO_2,'r+:');
hold off
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%
handles.RHO_1 =RHO_1;
%EXPORTAR DATOS A OTRAS
FUNCIONES
handles.THETA_1=THETA_1;
%EXPORTAR DATOS A OTRAS
FUNCIONES
handles.RHO_2 =RHO_2;
FUNCIONES
handles.THETA_2=THETA_2;
FUNCIONES
%EXPORTAR DATOS A OTRAS
%EXPORTAR DATOS A OTRAS
guidata(hObject,handles)%ESTA LÍNEA SIEMPRE VA CUANDO
USAMOS "HANDLES" PARA
% EXPORTAR DATOS A OTRAS FUNCIONES.
set(handles.inicio,'Enable','on');
set(handles.GraficaP,'Enable','on');
set(handles.GraficaL,'Enable','on');
% -----------------------------------------------------------------------% --- GRAFICAP
function GraficaP_Callback(hObject, eventdata, handles)
114
RHO_1= handles.RHO_1; %LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
THETA_1 = handles.THETA_1;%LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
RHO_2= handles.RHO_2; %LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
THETA_2 = handles.THETA_2;%LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
axes(handles.Polar)
figure;
title ('Patron POLAR EN dB');
polar(THETA_1,RHO_1);
figure;
title ('Patron POLAR EN dBA');
polar(THETA_2,RHO_2);
% --- Executes on button press in GraficaL.
function GraficaL_Callback(hObject, eventdata, handles)
RHO_1= handles.RHO_1; %LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
THETA_1 = handles.THETA_1;%LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
RHO_2= handles.RHO_2; %LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
THETA_2 = handles.THETA_2;%LLAMAR LOS DATOS DE ANTERIOR
FUNCIÓN
axes(handles.Polar)
figure;
hold on
grid on
title ('Dierctividad');
xlabel ('Frecuencia');
ylabel ('dB')
semilogx (THETA_1,RHO_1)
%title ('Dierctividad');
%xlabel ('Frecuencia');
%ylabel ('dB')
semilogx (THETA_2, RHO_2,'r+:')
hold off
115
% --- Executes when user attempts to close figure1.
function figure1_CloseRequestFcn(hObject, eventdata,
handles)
opc=questdlg('¿Desea Salir de este SUPER programa?',...
'SALIR','Si','No','No')
if strcmp (opc,'No')
return;
end
delete(hObject)
116
ANEXO F
Tabla de datos de los valores obtenidos en matlab para la medición de
los 360º con resolución de 1º
Ángulo
0º
1º
2º
3º
4º
5º
6º
7º
8º
9º
10º
11º
12º
13º
14º
15º
16º
17º
18º
19º
20º
21º
22º
23º
24º
25º
26º
27º
28º
29º
30º
31º
32º
33º
34º
35º
36º
37º
38º
39º
40º
41º
42º
43º
Nivel
SPL dBA
87,310
87,286
87,278
87,274
87,255
87,252
87,217
87,181
87,147
87,120
87,091
87,064
87,042
87,017
86,990
86,958
86,926
86,894
86,858
86,814
86,776
86,742
86,701
86,664
86,623
86,582
86,540
86,495
86,451
86,406
86,351
86,300
86,244
86,187
86,122
86,060
85,993
85,930
85,866
85,803
85,740
85,672
85,601
85,535
44º
45º
46º
47º
48º
49º
50º
51º
52º
53º
54º
55º
56º
57º
58º
59º
60º
61º
62º
63º
64º
65º
66º
67º
68º
69º
70º
71º
72º
73º
74º
75º
76º
77º
78º
79º
80º
81º
82º
83º
84º
85º
86º
87º
88º
89º
85,465
85,395
85,323
85,251
85,176
85,099
85,020
84,941
84,862
84,782
84,702
84,618
84,534
84,451
84,361
84,272
84,185
84,098
84,012
83,922
83,837
83,749
83,661
83,573
83,485
83,396
83,309
83,219
83,128
83,038
82,946
82,852
82,757
82,662
82,567
82,470
82,372
82,272
82,172
82,073
81,972
81,870
81,767
81,665
81,564
81,462
117
90º
91º
92º
93º
94º
95º
96º
97º
98º
99º
100º
101º
102º
103º
104º
105º
106º
107º
108º
109º
110º
111º
112º
113º
114º
115º
116º
117º
118º
119º
120º
121º
122º
123º
124º
125º
126º
127º
128º
129º
130º
131º
132º
133º
134º
135º
81,361
81,258
81,157
81,055
80,955
80,854
80,754
80,656
80,556
80,455
80,356
80,258
80,159
80,063
79,966
79,870
79,776
79,683
79,588
79,494
79,402
79,310
79,220
79,133
79,047
78,961
78,875
78,792
78,709
78,621
78,539
78,459
78,379
78,302
78,226
78,152
78,078
78,004
77,931
77,860
77,789
77,722
77,654
77,588
77,523
77,460
136º
137º
138º
139º
140º
141º
142º
143º
144º
145º
146º
147º
148º
149º
150º
151º
152º
153º
154º
155º
156º
157º
158º
159º
160º
161º
162º
163º
164º
165º
166º
167º
168º
169º
170º
171º
172º
173º
174º
175º
176º
177º
178º
179º
180º
181º
182º
183º
184º
185º
77,395
77,333
77,273
77,213
77,156
77,097
77,041
76,983
76,927
76,871
76,817
76,764
76,710
76,659
76,607
76,557
76,507
76,457
76,407
76,359
76,312
76,265
76,219
76,173
76,128
76,084
76,039
75,995
75,951
75,908
75,868
75,827
75,786
75,747
75,708
75,669
75,632
75,594
75,557
75,521
75,485
75,449
75,415
75,380
75,346
75,390
75,416
75,452
75,489
75,525
186º
187º
188ºº
189º
190º
191º
192º
193º
194º
195º
196º
197º
198º
199º
200º
201º
202º
203º
204º
205º
206º
207º
208º
209º
210º
211º
212º
213º
214º
215º
216º
217º
218º
219º
220º
221º
222º
223º
224º
225º
226º
227º
228º
229º
230º
231º
232º
233º
234º
235º
75,567
75,599
75,642
75,679
75,718
75,758
75,796
75,831
75,879
75,908
75,961
75,995
76,049
76,084
76,148
76,173
76,229
76,265
76,312
76,369
76,427
76,467
76,527
76,577
76,637
76,679
76,732
76,774
76,837
76,875
76,927
76,995
77,061
77,097
77,176
77,243
77,293
77,353
77,395
77,460
77,543
77,598
77,674
77,742
77,799
77,880
77,931
78,004
78,078
78,172
118
236º
237º
238º
239º
240º
241º
242º
243º
244º
245º
246º
247º
248º
249º
250º
251º
252º
253º
254º
255º
256º
257º
258º
259º
260º
261º
262º
263º
264º
265º
266º
267º
268º
269º
270º
271º
272º
273º
274º
275º
276º
277º
278º
279º
280º
281º
282º
283º
284º
285º
78,246
78,312
78,399
78,469
78,569
78,651
78,759
78,792
78,875
78,961
79,047
79,143
79,220
79,350
79,432
79,494
79,588
79,673
79,776
79,890
79,976
80,063
80,159
80,258
80,356
80,455
80,566
80,676
80,754
80,864
80,985
81,055
81,157
81,278
81,381
81,482
81,584
81,685
81,787
81,890
81,992
82,093
82,172
82,282
82,352
82,490
82,567
82,682
82,777
82,872
286º
287º
288º
289º
290º
291º
292º
293º
294º
295º
296º
297º
298º
299º
300º
301º
302º
303º
304º
305º
306º
307º
308º
309º
310º
82,966
83,058
83,138
83,239
83,329
83,396
83,485
83,593
83,681
83,769
83,857
83,942
84,032
84,098
84,185
84,292
84,381
84,471
84,554
84,638
84,702
84,782
84,882
84,961
85,040
311º
312º
313º
314º
315º
316º
317º
318º
319º
320º
321º
322º
323º
324º
325º
326º
327º
328º
329º
330º
331º
332º
333º
334º
335º
85,099
85,196
85,271
85,323
85,395
85,485
85,555
85,621
85,672
85,770
85,803
85,886
85,930
85,993
86,090
86,122
86,187
86,254
86,320
86,351
86,436
86,451
86,495
86,540
86,582
119
336º
337º
338º
339º
340º
341º
342º
343º
344º
345º
346º
347º
348º
349º
350º
351º
352º
353º
354º
355º
356º
357º
358º
359º
360º
86,623
86,664
86,701
86,742
86,776
86,814
86,858
86,894
86,926
86,958
86,990
87,017
87,042
87,064
87,091
87,120
87,147
87,181
87,217
87,252
87,255
87,374
87,378
87,386
87,390