AVANCE DE CONCEPTOS GEOMETRÍA DIFERENCIAL
Anuncio

AVANCE DE CONCEPTOS GEOMETRÍA DIFERENCIAL
Índice
1. Introducción a las curvas en E3
1.1. Definición matemática de curva . . . . . . . . . . . .
1.2. Cambio de parámetro . . . . . . . . . . . . . . . . . .
1.3. Longitud de una curva y parámetro longitud de arco
1.4. Secantes y tangente . . . . . . . . . . . . . . . . . . .
1.5. Plano normal . . . . . . . . . . . . . . . . . . . . . .
1.6. Vector curvatura . . . . . . . . . . . . . . . . . . . .
1.7. Plano osculador . . . . . . . . . . . . . . . . . . . . .
1.8. Triedro intrínseco . . . . . . . . . . . . . . . . . . . .
1.9. Fórmulas de Frenet . . . . . . . . . . . . . . . . . . .
2. Introducción a las superficies en E3
2.1. Definición matemática de superficie . . . . . . . .
2.2. Superficies Regladas . . . . . . . . . . . . . . . .
2.3. Superficies Regladas desarrollables . . . . . . . . .
2.3.1. Definición . . . . . . . . . . . . . . . . . .
2.3.2. Caracterización matemática . . . . . . . .
2.3.3. Arista o Borde de retroceso . . . . . . . .
2.3.4. Clasificación de las regladas desarrollables
2.4. Superficies Regladas alabeadas . . . . . . . . . . .
2.4.1. Definición . . . . . . . . . . . . . . . . . .
2.4.2. Caracterización matemática . . . . . . . .
2.4.3. Línea de estricción . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
2
2
3
3
3
4
5
5
.
.
.
.
.
.
.
.
.
.
.
7
7
7
7
7
7
8
8
8
8
8
8
A. Longitud de una curva
9
B. Radio de curvatura
9
C. Radio de torsión
9
D. Caracterización de las superficies regladas desarrollables
10
E. Puntos singulares de la parametrización en una reglada desarrollable
10
F. Caracterización de las superficies regladas alabeadas
11
1
2
Introducción a las curvas en E3
1.
1.1.
Definición matemática de curva
Sea I un intervalo de la recta real y sea una función continua de la forma:
x̄
→ R3
7
→
x̄(u) = ⌊x(u) y(u) z(u)⌋
: I
u
Sea E3 el espacio afín-euclídeo asociado al espacio vectorial R3 con la métrica euclídea. Se llama
curva al lugar geométrico del espacio anterior definido por:
C = {O + x̄(u) ∈ E3 | u ∈ I}
Se llama representación paramétrica o parametrización de una curva al par (x̄, I) y a la variable
independiente de la función se la denomina parámetro de la curva. También existen otros tipos de
representaciones de una curva, que no se consideran en esta introducción.
1.2.
Cambio de parámetro
Se llama cambio de parámetro al homeomorfismo (función continua, biyectiva y con inversa continua) definido entre dos intervalos I y J de la recta real:
φ
: J → I
v 7→ u = φ(v)
El resultado de un cambio de parámetro es la transformación de la parametrización (x̄, I) en la
(ȳ, J), donde se tiene que:
ȳ = x̄ ◦ φ
1.3.
⇔
ȳ(v) = x̄(φ(v))
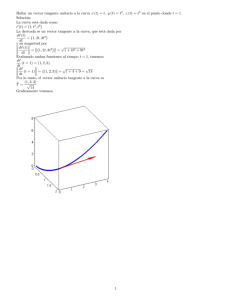
Longitud de una curva y parámetro longitud de arco
u1
Se dice que una curva es rectificable cuando el conjunto
de las longitudes de la poligonales inscritas en la misma
está acotado y se define longitud de una curva como el supremo de dicho conjunto.
Se demuestra que cuando la curva es de clase C 1 la
longitud de la misma viene dada por (su demostración se
propone al lector como ejercicio y se recoge en el apéndice)1 :
Z u1
Z u1 p
′
L=
| x̄ (t)| dt =
x′ (t)2 + y ′(t)2 + z ′ (t)2 dt
u0
z1
Q u
x̄(u)
s
P
u0
O
y1
u0
Si se toma como origen de arcos un punto cualquiera
del intervalo (por ejemplo, el extremo derecho) se puede
definir un cambio de parámetro de la siguiente forma:
s
x̄′ (u)
poligonal inscrita
x1
: I → [0, L] R
u
u 7→ s(u) = u0 | x̄′ (t)| dt
Este parámetro, llamado longitud de arco s, es especial y se puede tomar como coordenada curvilínea intrínseca de la curva.
1
Las derivadas con respecto a un parámetro cualquiera se representan en Geometría Diferencial con una “prima”
3
1.4.
Secantes y tangente
Sea P el punto de la curva correspondiente al valor del parámetro u0 ; la recta que lo une con otro
distinto Q de la misma, de parámetro u, se denomina recta secante s. Un vector de la dirección de
la secante es:
S̄(u) =
x̄(u) − x̄(u0)
u − u0
Cuando hacemos tender el punto Q a P , la recta secante tiende a una posición límite que se denomina
recta tangente t a la curva en P . Por lo tanto, el vector tangente en P es:
x̄(u) − x̄(u0)
= x̄′ (u0 )
u→u0
u − u0
T̄ = lı́m S̄(u) = lı́m
u→u0
Se define el versor tangente (vector tangente unitario) como:
′
~t = x̄ (u)
|x̄′ (u)|
Si el parámetro de la curva es la longitud de arco se cumple2 :
x̄˙ =
1.5.
dx̄ du
1
dx̄
=
= x̄′ (u) ′
= ~t
ds
du ds
|x̄ (u)|
Plano normal
Se llama plano normal a la curva en P al plano ortogonal al vector tangente a la curva en dicho
punto. Su representación implícita es:
πN : T̄ (u0 ) · (x̄ − x̄(u0 )) = 0
1.6.
Vector curvatura
Se define en Geometría Diferencial el vector curvatura como el vector derivada segunda de la
parametrización con respecto al parámetro longitud de arco dos veces y curvatura como el módulo de
dicho vector. Radio de curvatura es el inverso de la curvatura y equivale a la derivada del parámetro
longitud de arco respecto al ángulo ϕ que forman dos tangentes muy próximas (véase apéndice).
k̄ = x̄¨ = ~t˙
k = |x̄¨|
R = k −1 =
ds
dϕ
Para desentrañar la naturaleza del citado vector hacemos lo siguiente:
d
ds
~t · ~t = 1 →
~t · ~t˙ = 0 = ~t · x̄¨
⇒
~t = x̄˙ ⊥ x̄¨
Luego el vector curvatura es perpendicular al vector tangente y, por lo tanto, está contenido en el
plano normal a la curva en dicho punto.
2
Cuando las derivadas se hacen con respecto al parámetro longitud de arco es costumbre representarlas cambiando
la “prima” por un punto encima.
4
Se denomina recta normal principal n a la recta que pasa por un punto de la curva y tiene la
dirección del vector curvatura y se llama versor normal principal al vector:
~n =
x̄¨
|x̄¨|
Con ello resulta:
k̄ = x̄¨ = k~n
Demostramos que dicho vector apunta siempre en sentido de la concavidad de la curva en los puntos
donde no se anula la curvatura. Desarrollando en serie de Taylor y reteniendo los tres primeros
términos se tiene:
1
x̄(s) = x̄(s0 ) + (s − s0 )~t(s0 ) + (s − s0 )2 k(s0 )~n(s0 ) + . . .
|
{z
} |2
{z
}
recta tangente en s=s0
desviación de la curva
el tercer término representa la desviación de la curva respecto de la tangente en las proximidades de
P (s0 ); como (s − s0 )2 /2 es positivo el vector k~n apunta hacia la parte cóncava de la curva.
1.7.
Plano osculador
Se llama plano osculador a la curva en el punto P al plano que definen las rectas tangente y
normal a la curva en P . Demostramos que es el plano que tiene un contacto de segundo orden con
la curva. La ecuación implícita de un plano genérico que pasa por P (u0) por la siguiente ecuación:
π : ā · x̄ − x̄(u0 ) = 0
(ā arbitrario)
y definamos la función siguiente:
F (x̄) = ā · x̄ − x̄(u0 )
A partir de la parametrización de la curva construyamos una nueva función:
Γ = F ◦ x̄(u) : I → R
u 7→ F (x̄(u)) = ā · (x̄(u) − x̄(u0))
Para que tenga un contacto de orden dos con el plano en un punto debe satisfacer las siguientes
tres condiciones:
d kΓ
(u0 ) = 0 (k = 0, 1, 2)
du k
Contacto de orden 0:
Γ(u0 ) = 0 (es obvio que pasa por el punto)
Contacto de orden 1:
dΓ
(u0 ) = ā · x̄′ = 0
du
⇒
ā ⊥ ~t
Contacto de orden 2:
d 2Γ
(u0 ) = ā · x̄′′ = 0
du 2
⇒
ā ⊥ x̄′′
5
Solo falta por ver ahora la dirección del vector derivada segunda respecto a cualquier parámetro:
d ds ~
d 2s ~
ds
( t) =
t + ( )2 k~n
2
du du
du
du
Como este vector es linealmente independiente del vector tangente siempre que no estemos en un
punto de inflexión (curvatura nula) los vectores derivada primera y segunda respecto a un parámetro
cualquiera definen un plano, el plano osculador. La recta perpendicular al plano osculador (cuya
dirección es la del vector ā) se denomina recta binormal b y se define el versor binormal como:
x̄′′ =
~b = ~t × ~n
El plano que definen los versores ~t y ~b se denomina plano rectificante.
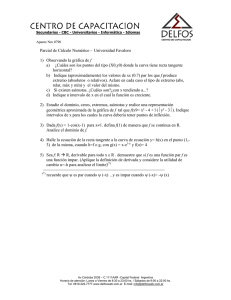
1.8.
Triedro intrínseco
πN
Se denomina triedro intrínseco de una curva en un punto al formado por los versores tangente, normal principal y
binormal en dicho punto {P ; ~t, ~n, ~b}. A medida que vamos
describiendo la curva estos versores irán variando y, por lo
tanto, también el triedro intrínseco.
1.9.
b
n
z
~n
P
Fórmulas de Frenet
~b
πR
t
~t
πO
x̄(u)
Se llaman fórmulas de Frenet a las derivadas de los versores del triedro intrínseco con respecto al parámetro longitud de arco. La primera ya se ha deducido:
O
y
~t˙ = k~n
Para el versor binormal se tiene:
d
˙
ds ~
~b · ~b = 1 →
b · ~b = 0 ⇒
~b˙ = ~t˙ × ~n + ~t × ~n˙ = ~t × ~n˙ ⇒
x
~b˙ ⊥ ~b
~b˙ ⊥ ~t
Esto implica que:
~b˙ ∝ ~n
Es costumbre en Geometría Diferencial escribirla de la siguiente forma:
~b˙ = −τ~n
recibiendo la variable de proporcionalidad τ el nombre de torsión de la curva y su inversa radio de torsión,
que equivale a la derivada del parámetro longitud de arco con respecto al ángulo θ que forman dos
binormales muy próximas (véase apéndice):
ds
dθ
Para el versor normal se tiene:
T = τ −1 =
d
ds ˙
~n · ~n = 1 →
~n · ~n = 0 ⇒ ~n˙ ⊥ ~n
~n · ~t = 0 ⇒ ~n˙ · ~t = −~t˙ · ~n = −κ
˙
~n · ~b = 0 ⇒ ~n˙ · ~b = −~b · ~n = τ
De donde se desprende que:
6
~n˙ = −κ~t + τ~b
Resumiendo (en forma matricial):
~t
0
κ
0
~t
d
~n
τ ~n
= −κ 0
~
ds ~
0
−τ 0
b
b
7
Introducción a las superficies en E3
2.
2.1.
Definición matemática de superficie
Sea Ω un conjunto conexo de R2 y sea una función continua de la forma:
x̄
: Ω
→
u,v 7→
R3
x̄(u, v) = ⌊x(u, v) y(u, v) z(u, v)⌋
Sea E3 el espacio afín-euclídeo asociado al espacio vectorial R3 con la métrica euclídea. Se llama
superficie al lugar geométrico del espacio anterior definido por:
S = {O + x̄(u, v) ∈ E3 | (u, v) ∈ Ω}
Se llama representación paramétrica o parametrización de una superficie al par (x̄, Ω) y a las
variables independientes de la función se las denomina parámetros de la superficie. También existen
otros tipos de representaciones de una superficie, que no se consideran en esta introducción.
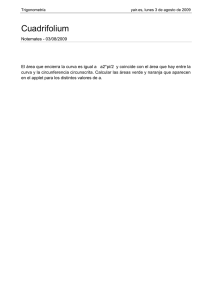
2.2.
Superficies Regladas
Se dice que una superficie es reglada si por cada punto de la misma pasa al menos una recta
enteramente contenida en ella.
Si en cada punto hay al menos una reglante se denomina simplemente reglada; por ejemplo, el
helicoide. Si en cada punto hay al menos dos reglantes distintas se denomina doblemente reglada; por
ejemplo, el hiperboloide reglado.
Ecuación de una reglada genérica:
1
3
ȳ(u) ∈ C (R, R ) curva directriz
x̄(u, v) = ȳ(u) + v~ı (u)
versor director
1
3
~ı (u) ∈ C (R, R )
(curva de la esfera de radio unidad)
A las curvas coordenadas u = cte, que en este caso son rectas o reglantes, se les denomina
generatrices.
Vector normal:
N̄ = x̄u ∧ x̄v = ȳ ′ (u) ∧~ı (u) + vı̄ ′ (u) ∧~ı (u)
2.3.
Superficies Regladas desarrollables
2.3.1.
Definición
Se dice que una superficie reglada es desarrollable todos los puntos de una generatriz comparten
la misma dirección normal. Esta definición es equivalente a que su curvatura gaussiana sea nula en
cada punto.
2.3.2.
Caracterización matemática
Para que la dirección del vector normal sea independiente de v se necesita que:
ȳ ′ (u) ∧~ı (u) k ı̄ ′ (u) ∧~ı (u), ∀u ⇒ ȳ ′ (u),~ı (u),~ı ′ (u) sean vectores coplanarios ⇔
⇔ linealmente dependientes: [ȳ ′ (u),~ı (u),~ı ′ (u)] = 0, ∀u
8
2.3.3.
Arista o Borde de retroceso
Es el lugar geométrico de los puntos de una superficie reglada desarrollable donde la parametrización no es regular. Se demuestra que es una curva de la misma cuya ecuación es:
ȳ ′ (u) · ı̄ ′ (u)
z̄(u) = ȳ(u) − ′
~ı (u)
ı̄ (u) · ı̄ ′ (u)
Se demuestra que es una curva que en cada punto es tangente a una de las reglantes de la superficie.
2.3.4.
Clasificación de las regladas desarrollables
′
ı̄ (u) ≡ 0, cilindro
z̄ ′ (u) ≡ 0, cono
′
z̄ (u) 6≡ 0, desarrollable tangencial
2.4.
Superficies Regladas alabeadas
2.4.1.
Definición
Se dice que una superficie reglada es alabeada si la dirección normal va cambiando a lo largo de una
misma generatriz. Se define una correspondencia dentro de cada generatriz (u = u0 ) entre cada punto
(v) y su plano tangente (N̄ (u0, v)) (haz de planos que pasan por la generatriz). Se comprueba que
los planos límites por los dos extremos de una generatriz coinciden. Se denomina plano asintótico al
plano tangente en los puntos del infinito de la generatriz. Se denomina plano central al perpendicular
al plano asintótico. Al punto correspondiente al plano central se le denomina punto central. Un
punto central también se caracteriza por ser el límite de la perpendicular común a dos generatrices
infinitamente próximas.
2.4.2.
Caracterización matemática
Se llama parámetro de distribución de una superficie reglada alabeada a la función:
p(u) = [ȳ ′ (u),~ı (u),~ı ′ (u)]
2.4.3.
Línea de estricción
Es el lugar geométrico de los puntos centrales de una superficie reglada alabeada. Su ecuación es:
ȳ ′ (u) · ı̄ ′ (u)
w̄(u) = ȳ(u) − ′
~ı (u)
ı̄ (u) · ı̄ ′ (u)
9
Teoremas obviados en primera lectura
A.
Longitud de una curva
z1
La longitud de una curva rectificable de clase C 1 se
calcula mediante la fórmula:
Z u1
Z u1 p
′
x′ (ξ)2 + y ′(ξ)2 + z ′ (ξ)2 dξ
L=
| x̄ (ξ)| dξ =
u0
u0
P
x̄(u)
u0
O
Demostración:
x̄(u + du) = x̄(u) + x̄′ (u)du + . . .
ds = |x̄(u + du) − x̄(u)| ≈ |x̄′ (u)|du
Z
Ru
L = ds ⇒ L = u01 |x̄′ (ξ)|dξ
B.
s
u
ds
Q
x̄(u + du)
u1
y1
x1
Radio de curvatura
El radio de curvatura equivale a la derivada del parámetro longitud de arco respecto al ángulo ϕ
que forman dos tangentes muy próximas
~t(s)
Demostración:
dϕ
~
~
~
| t(s + ds) ∧ t(s)|
t(s + ds)
z1
=
dϕ ≈ sin(dϕ) =
Q
~
~
| t(s + ds)|| t(s)|
~t(s)
P
= | k̄(s) ∧ ~t(s)| ds =
s u ds
~t(s + ds)
u
u
0
~
1
= k(s)| ~n(s) ∧ t(s)| ds = k(s)ds ⇒
x̄(u)
dϕ
ds
−1
⇒ ρ = k = dϕ
k(s) =
O
y1
ds
C.
Radio de torsión
x1
El radio de torsión equivale a la derivada del parámetro longitud de arco respecto al ángulo θ que
forman dos binormales muy próximas
~b(s) ~b(s + ds)
Demostración:
dθ
| ~b(s + ds) ∧ ~b(s)|
=
dθ ≈ sin(dθ) =
~b(s) ~
b(s + ds)
| ~b(s + ds)|| ~b(s)|
z1
˙
Q
= |~b(s) ∧ ~b(s) ds| =
P
s u ds
= | − τ (s)~n(s) ∧ ~b(s)| ds =
u
u1
0
= τ (s)| ~t(s)| ds = τ (s) ds ⇒
x̄(u)
dθ
ds
τ (s) =
⇒
T = τ −1 = dθ
O
y1
ds
x1
10
D.
Caracterización de las superficies regladas desarrollables
Representación paramétrica de una superficie reglada y vectores tangentes a la curvas coordenadas:
x̄(u, v) = ȳ (u) + v~ı (u)
x̄u (u, v) = ȳ ′ (u) + vı̄ ′ (u)
x̄v (u, v) = ~ı (u)
El vector normal será:
N̄ = x̄u ∧ x̄v = ȳ ′ (u) ∧~ı (u) + vı̄ ′ (u) ∧~ı (u)
Si la dirección del vector normal no cambia a lo largo de una reglante es porque no depende del
parámetro v, por lo que se cumplirá que:
N̄ ∧ N̄v = 0̄ = (ȳ ′ ∧~ı + vı̄ ′ ∧~ı) ∧ (~ı ∧ ı̄ ′ ) = (ȳ ′ ∧~ı) ∧ (~ı ∧ ı̄ ′ ) = ı̄ ′ · (ȳ ′ ∧~ı)
Lo que es equivalente a:
det(ȳ ′ ,~ı,ı̄ ′ ) = [ȳ ′ , ~ı, ı̄ ′ ] = 0
La interpretación geométrica es la siguiente: si la dirección de la normal no depende del parámetro
v es porque los vectores ȳ ′ (u) ∧~ı (u) y ı̄ ′ (u) ∧~ı (u) son paralelos, lo que implica que ȳ ′ , ~ı, ı̄ ′ deben
ser coplanarios.
E.
Puntos singulares de la parametrización en una reglada
desarrollable
Si la superficie es desarrollable se puede considerar que:
∃λ(u), µ(u) ∈ C0 : ȳ ′ (u) = λ(u)~ı (u) + µ(u)ı̄ ′ (u)
λ(u) = ȳ ′ (u) ·~ı (u)
ȳ ′ (u) · ı̄ ′ (u)
µ(u) =
ı̄ ′ (u) · ı̄ ′ (u)
(1)
(2)
(3)
La parametrización no es regular donde no está definido el plano tangente. Esto es equivalente
a que el vector normal sea nulo. Busquemos un punto de la reglante (caracterizado por el valor del
parámetro v = v ∗ ) donde el vector normal sea nulo:
(1)
0̄ = N̄(u, v ∗ ) = x̄u (u, v ∗ ) ∧ x̄v (u, v ∗) = ȳ ′ (u) ∧~ı (u) + v ∗ ı̄ ′ (u) ∧~ı (u) =
′
′
(3) ȳ (u) · ı̄ (u)
∗
= µ(u)(ı̄ ′ (u) ∧~ı (u)) + v ∗ ı̄ ′ (u) ∧~ı (u) =
+
v
(u)
(ı̄ ′ (u) ∧~ı (u))
ı̄ ′ (u) · ı̄ ′ (u)
′
ı̄ (u) ∧~ı (u) = 0̄, ∀u
ı̄ ′ (u) ∧~ı (u) 6= 0̄,
ı̄ ′ (u) = 0̄
⇒
⇒ Cilindro
ȳ (u) · ı̄ ′ (u)
v∗ = − ′
ı̄ (u) · ı̄ ′ (u)
′
⇒
La curva de una superficie reglada desarrollable formada por los puntos donde la parametrización
no es regular se denomina borde u arista de retroceso y está dada por la parametrización:
ȳ ′ (u) · ı̄ ′ (u)
∗
z̄(u) = x̄(u, v (u)) = ȳ(u) − ′
~ı (u)
ı̄ (u) · ı̄ ′ (u)
11
Demostremos que la tangente en cualquiera de sus puntos coincide con una reglante:
(1)
ȳ ′ (u) · ı̄ ′ (u) = µ(u) ı̄ ′ (u) · ı̄ ′ (u) ⇒ z̄(u) = ȳ(u) − µ(u)~ı (u)
z̄ ′ (u) = ȳ ′ (u) − µ(u) ı̄ ′ (u) − µ ′ (u)~ı (u) =
(1)
′
′
= λ(u)~ı (u) + µ(u)ı̄
(u) − µ(u)
(u) − µ ′ (u)~ı (u) =
ı̄
= λ(u) − µ ′ (u) ~ı (u)
λ(u) = µ ′(u) ⇒ z̄ ′ (u) = 0̄ ⇒ z̄ (u) = z̄0 ⇒ x̄(u, v) = z̄0 + v~ı (u) (Cono de vértice z̄0 )
λ(u) 6= µ ′(u) ⇒ z̄ ′ (u) ∧~ı (u) = 0 ⇒ la tangente a la curva coincide con una reglante ⇔
⇔ la S.R.D. es la desarrollable tangencial de la arista de retroceso z̄ (u)
Otra forma alternativa: La parametrización no es regular en los puntos donde se anule el Jacobiano
de la aplicación x̄ ∈ C1 (Ω ⊂ R2 , R3 ).
x̄u (u, v ∗) · x̄u (u, v ∗ ) x̄u (u, v ∗) · x̄v (u, v ∗) ∗
=
0 = J(u, v ) = x̄u (u, v ∗) · x̄v (u, v ∗ ) x̄v (u, v ∗) · x̄v (u, v ∗) = (ı̄ ′ · ı̄ ′ )(v ∗ )2 + 2(ȳ ′ · ı̄ ′ )v ∗ + [(ȳ ′ · ȳ ′ ) − (ȳ ′ ·~ı)2 ] ⇒
(
((
(((
p
((
(
′
′
(
′
′
2
′
′
′
′
′
(
−ȳ · ı̄ ± (ȳ · ı̄()(−
· ı̄ [(ȳ · ȳ ) − (ȳ ·~ı)2 ] (NOTA) ȳ ′ · ı̄ ′
(ı̄((
(
⇒ v ∗ (u) =
= − ′ ′
(
((
ı̄ ′ · ı̄ ′
ı̄ · ı̄
NOTA: Teniendo en cuenta que la superficie reglada es desarrollable, los vectores ȳ ′ ,~ı, ı̄ ′ deben ser coplanarios. Además ~ı ⊥ ı̄ ′ .
Por el teorema de Pitágoras:
ȳ ′ · ȳ ′ = (ȳ ′ ·~ı)2 +
F.
(ȳ ′ · ı̄ ′ )2
ı̄ ′ · ı̄ ′
Caracterización de las superficies regladas alabeadas
Plano asintótico es el plano tangente a la superficie alabeada en los puntos del infinito de la
reglante.
ȳ ′ ∧~ı
N̄
′
= lı́m
+ sign(v)ı̄ ∧~ı = ± ı̄ ′ ∧~ı
N̄±∞ = lı́m
v→±∞
v→±∞ |v|
|v|
Los planos asintóticos de ambos extremos están girados un ángulo π y como comparten la generatriz,
coinciden geométricamente.
Punto central es aquel punto de la reglante en el que su plano tangente es perpendicular al plano
asintótico. Busquemos el punto central dado por el valor del parámetro v = v ∗ correspondiente a una
reglante genérica de parámetro u:
N̄ (u, v ∗) · (ı̄ ′ (u) ∧~ı (u)) = 0 = (ȳ ′ ∧~ı) · (ı̄ ′ ∧~ı) + v ∗ (ı̄ ′ ∧~ı) · (ı̄ ′ ∧~ı) =
= ȳ ′ · ı̄ ′ + v ∗ (ı̄ ′ · ı̄ ′ ) ⇒
ȳ ′ · ı̄ ′
⇒ v∗ = − ′ ′
ı̄ · ı̄
La linea de estricción de una superficie reglada alabeada es la curva que forman los puntos
centrales, cuya ecuación paramétrica será:
ı̄ ′ (u) · ȳ ′ (u)
w̄(u) = x̄(u, v ∗ (u)) = ȳ(u) − ′
~ı (u)
ı̄ (u) · ı̄ ′ (u)