TEOREMA DE LA FUNCIÓN IMPLÍCITA
Anuncio

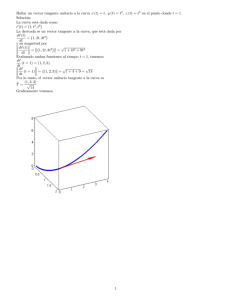
TEOREMA DE LA FUNCIÓN IMPLÍCITA Curva dada como intersección de dos superficies Consideremos el campo vectorial F = (f1 , f2 ) : IR × IR2 → IR2 y nos preguntamos si en el entorno½de un punto P = (a, b, c) podemos despejar z = z(x) e y = y(x) del f1 (x, y, z) = 0 sistema C :: f2 (x, y, z) = 0 El teorema de la función implícita establece bajo qué condiciones esto será posible: (1) F (a, b, c) = 0, lo que nos asegura que el punto P pertenece a ambas superficies. (2) F diferenciable con continuidad en el entorno del punto P , es decir, las derivadas ∂f1 ∂f1 ∂f1 ∂f2 ∂f2 ∂f2 parciales , , , , , existen y son continuas. ∂x ∂y ∂z ∂x ∂y ∂z ∂f1 ∂f1 ∂y ∂z (3) det ∂f2 ∂f2 (a, b, c) 6= 0 ∂y ∂z Bajo las hipótesis anteriores, el Teorema de la Función Implícita asegura que existen ( f1 (x, y, z) = 0 funciones y = y(x) y z = z(x) diferenciables. Por tanto, la curva C := f2 (x, y, z) = 0 puede ser parametrizada en un entorno del punto (a, b, c) de la siguiente manera α(x) = (x, y(x), z(x)) y sabemos que α(a) = (a, b, c). No conocemos la expresión explícita de la parametrización, pero si que podremos calcular el vector tangente ya que el Teorema de la Función Implícita nos proporciona las derivadas de las funciones. Entonces, α0 (x) = (1, y 0 (x), z 0 (x)), donde " y 0 (x) z 0 (x) # −1 ∂f1 ∂f1 ∂y (x, y) ∂z (x, y) = − ∂f2 ∂f2 (x, y) (x, y) ∂y ∂z ∂f1 (x, y) ∂x ∂f2 (x, y) ∂x El vector tangente a α(x) puede calcularse mediante la fórmula α0 (x) = ∇f1 (x, y, z) × ∇f2 (x, y, z), ya que el vector ∇f1 (x, y, z) es ortogonal a la superficie de nivel f1 (x, y, z) = 0 y ∇f2 (x, y, z) es ortogonal a la superficie de nivel f2 (x, y, z) = 0. Por tanto, el vector ∇f1 (x, y, z) × ∇f2 (x, y, z) es paralelo a la tangente a la curva intersección de ambas superficies. Ejemplo Problema 1 Calcular la recta tangente y el plano normal a la curva siguiente, en el punto (0, 0, 2). ½ zcos(xy) + x sin y = 2 C := sin(xz) + ey = 1 Solución 1a forma Comprobaremos primero si se satisfacen las tres condiciones descritas anteriormente. Pora ello sean, f1 (x, y, z) = zcos(xy) + x sin y − 2, (1) f1 (0, 0, 2) = 2 + 0 − 2 = 0 f2 (x, y, z) = sen(xz) + ey − 1 y P = (0, 0, 2) y f2 (0, 0, 2) = 0 + 1 − 1 = 0 √ (2) Las derivadas parciales existen y son continuas por ser suma y producto de funciones elementales que lo son. ∂f1 ∂f2 (x, y, z) = −zy sin(xy) + sin(y) (x, y, z) = zcos(xz) ∂x ∂x √ ∂f1 ∂f2 (x, y, z) = −zx sin(xy) + xcos(y) (x, y, z) = ey ∂y ∂y ∂f2 ∂f1 (x, y, z) = cos(xy) (x, y, z) = xcos(xz) ∂z ∂z (3) El siguiente determinante es no nulo: ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ ∂f1 ∂y ∂f2 ∂y ∂f1 ∂z ∂f2 ∂z ¯ ¯ ¯ ¯ ¯ ¯ ¯ (0, 0, 2) = ¯ 0 1 ¯ 1 0 ¯ ¯ ¯ ¯ ¯ ¯ = −1 6= 0 √ ¯ Por lo que podemos asegurar que z = z(x) e y = y(x), y la curva α(x) = (x, y(x), z(x)) tendrá como vector tangente en x = 0 α0 (0) = (1, y 0 (0), z 0 (0)), donde " y 0 (0) # z 0 (0) ∂f1 ∂y (0, 0, 2) = − ∂f2 (0, 0, 2) ∂y · ¸−1 · 0 1 0 =− 1 0 2 −1 ∂f1 (0, 0, 2) ∂z ∂f2 (0, 0, 2) ∂z ¸ · ¸· 0 −1 = −1 0 ∂f1 (0, 02) ∂x ∂f2 (0, 0, 2) ∂x ¸ · ¸ 0 −2 = 2 0 Por lo que el vector tangente a la curva intersección, en el punto (0, 0, 2), es α0 (0) = (1, −2, 0) La ecuación del plano normal en el punto (0, 0, 2) (x − 0) − 2(y − 0) + 0(z − 2) = 0 =⇒ x − 2y = 0 Solución 2a forma Mediante los gradientes de las funciones f1 y f2 definimos el vector tangente a la curva en el punto (0, 0, 2) como ~t = ∇f1 (0, 0, 2) × ∇f2 (0, 0, 2) En este caso ∇f1 (0, 0, 2) = (0, 0, 1) y ∇f2 (0, 0, 2) = (2, 1, 0). Por tanto, ¯ ¯ i j k ¯ ~t = ¯ 0 0 1 ¯ ¯ 2 1 0 ¯ ¯ ¯ ¯ = (−1, 2, 0) ¯ ¯ Y de la misma manera la ecuación del plano normal en el punto (0, 0, 2) es (x − 0) − 2(y − 0) + 0(z − 2) = 0 =⇒ x − 2y = 0