DISEÑO DE COMPENSADORES DE ADELANTO El margen de fase
Anuncio

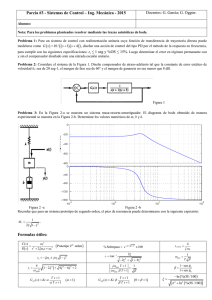
DISEÑO DE COMPENSADORES DE ADELANTO El margen de fase de un sistema suministra información acerca del comportamiento del mismo desde el punto de vista de la estabilidad. El margen de fase se puede obtener a partir de diagramas separados de magnitud y fase en función de la frecuencia (Bode). Para obtener al margen de fase inicialmente se ubica en el diagrama de magnitud la frecuencia a la cual la magnitud es 0 db (frecuencia de cruce de ganancia), ωg; luego en el diagrama de fase se localiza el valor de la fase para esta frecuencia y se suma 180°. Cuando el margen de fase de un sistema es positivo pequeño el comportamiento del sistema aunque estable es oscilatorio y en el caso de un valor negativo es inestable. El margen de fase de un sistema se puede mejorar colocando en cascada (serie) otro sistema llamado compensador en adelanto, el cual es básicamente un circuito eléctrico del tipo resistivo-capacitivo y puede incluir o no amplificadores operacionales. Se denomina de adelanto porque si por ejemplo se alimenta el circuito con una onda sinusoide de una determinada fase y frecuencia, la salida será otra sinusoide pero con la fase adelantada. Primero se examinan las características en frecuencia del compensador de adelanto y luego se presenta una técnica de diseño para el compensador de adelanto mediante el uso de las trazas de Bode. Características de los compensadores de adelanto. Considere un compensador de adelanto que tiene la función de transferencia siguiente: ( ) Tiene un cero en s =-1/ T y un polo en s =-l/T. El valor mínimo de α está limitado por la construcción física del compensador de adelanto. La fase de Gc(jw) es: ( ( ( ) ) ) ( ) [ ( ] ) ) El valor máximo de fase se encuentra en: de donde: ( ) y la frecuencia a la que ocurre la fase máxima es √ (2) El compensador en adelanto a la frecuencia máxima (ωm) atenúa en 10 log α. (3) Técnicas de compensación de adelanto basadas en el enfoque de la respuesta en frecuencia. La función principal del compensador de adelanto es volver a dar forma a la curva de respuesta en frecuencia a fin de ofrecer un ángulo de adelanto de fase suficiente para compensar el atraso de fase excesivo asociado con los componentes del sistema fijo. Considere el sistema de la figura 3 f Suponga que las especificaciones del desempeño se dan en términos del margen de fase, del margen de ganancia, de las constantes de error estático de velocidad, etc. El procedimiento para diseñar un compensador de adelanto mediante el enfoque de la respuesta en frecuencia se plantea del modo siguiente: 1. Suponga el siguiente compensador de adelanto: ( ) Se determina la ganancia del compensador de acuerdo a la condición que debe cumplir el sistema compensado (usualmente el error en estado estable). 2. Usando la ganancia Kc determinada, se dibujan las trazas de Bode de G1(s), el sistema con la ganancia ajustada pero sin el resto del compensador. Calcule el valor del margen de fase. 3. Determine el ángulo de adelanto de fase necesario que se agregará al sistema, es mejor sobreestimar dicho ángulo, por lo general se suman 5° más; esto debido a que la introducción del compensador modifica la curva de magnitud desplazando la frecuencia de corte hacia la derecha. 4. Determine el factor de atenuación α a partir de la ecuación (1). 5. Usando la ecuación 3 se calcula la cantidad de atenuación de magnitud (dB) del compensador, luego se establece la frecuencia a la cual la magnitud del sistema no ( ) es igual a ese valor. Seleccione ésta como la nueva frecuencia de compensado corte. Esta frecuencia corresponde a la frecuencia máxima de desfase, por lo tanto con la ecuación 2 se determina el parámetro T del compensador. 6. Se calcula el cero y el polo del compensador: Polo del compensador de adelanto: Cero del compensador de adelanto: 6. Usando los valores de Kc y el de α encontrados, se obtiene la función de transferencia del compensador diseñado: ( ) 7. Verifique el margen de ganancia para asegurarse de que es satisfactorio. De no ser así, repita el proceso de diseño modificando la ubicación de los polos y ceros del compensador hasta obtener un resultado satisfactorio.