5. TEOREMA FUNDAMENTAL: Repaso Variables Aleatorias
Anuncio

5. TEOREMA FUNDAMENTAL:
Repaso Variables Aleatorias
Jorge Eduardo Ortiz Triviño
jeortizt@unal.edu.co
http:/www.docentes.unal.edu.co/jeortizt/
CONTENIDO
1.
2.
3.
4.
5.
INTRODUCCIÓN
VARIABLES ALEATORIAS
TEOREMA FUNDAMENTAL.
GENERADORES DE V.A.
GENERALIZACIÓN DELTEOREMA
FUNDAMENTAL.
6. GENERADORES DE VECTORES
ALEATORIOS.
1. INTRODUCCIÓN
MODELAR
MODELO
MUNDO
REAL
EXPERIMENTAR?
DECISIONES
IMAGEN
DEL MUNDO
REAL
OBTENER RESULTADOS:
EXPERIMENTAR
1. INTRODUCCIÓN
Hasta el momento se han simulado sistemas cuya
densidad es uniforme. Es decir si X U a, b
1
f
(
x
)
Ia ,b x entonces
significa que X
b a
donde U
es un número
X a b a U
aleatorio.
Por fortuna todas las técnicas se basan en
generadores uniformes, y por tanto comparten
las características de estos.
4
1. INTRODUCCIÓN
Pero ¿Cómo simular comportamientos más
complejos que los uniformes? Por ejemplo,
¿Cómo simular eventos exponenciales
1
x
?
f ( x) exp x 0
El principal método de generación que estudiares es
el método de la transformación inversa: Teorema
Fundamental de la Simulación.
También estudiaremos otras técnicas basadas en
transformaciones.
5
2. Variables Aleatorias
Función que asigna a cada punto del espacio muestral
un número real
X:
Ejemplo N°1:
R
= falla , no falla
X( no falla ) = 0
X( falla ) = 1
2. Variables Aleatorias
Espacio Muestral
no falla
A cada s
le corresponde
exactamente
un valor X(s)
falla
X({no falla}) = 0
X({falla}) = 1
IR
0
X:
1
Conjunto
Números
Reales
Rx IR
X-1(-, x)
Familia de eventos elementales
2. Variables Aleatorias
si
X(s) = b; s
A
sk
X(s) = a
RX
a
b
• El espacio RX es el conjunto de TODOS los posible valores de X(s).
• En cierto sentido podemos considerar Rx como otro espacio muestral
• El espacio muestral original
“induce” un espacio muestra Rx asociado a
la Variable Aleatoria X
• Luego un evento A en S induce un evento en el espacio muestral RX
VARIABLES ALEATORIAS
A
sA
X : RX
H : RX RY
s dominio X
x RX rango X
(s, x) X
x RX dominio H
y RY rango
H
(x, y) H
RX
B
X(s) B
RY
C
H(x) C
H(X(s)) C
Y : RY
s dominio Y = H(X)
y RY rango Y = H(X)
(s, y) Y = H(X)
P(C) = P[{ x RX : H(x) C}] = P[{ s : H(X(s)) C}]
VARIABLE ALEATORIA: Clasificación
Variables aleatorias discretas
Función Cuantía
Variables aleatorias continuas
Función de densidad
Función de distribución
VARIABLES ALEATORIAS
Sea X v.a. con función de densidad (cuantía) fX(x)
Sea Y = H(x) también es una variable aleatoria.
Entonces:
Si H(x) discreta
Y = H( X) es
v.a. discreta
Y = H( X) es
v.a. discreta
Y = H( X) es
continua
v.a. discreta
Y = H( X) es
v.a. continua
discreta
X es v.a.
Si H(x) continua
VARIABLES ALEATORIAS
X U (0,1)
Y = ln X
FY ( y ) P(Y y ) P(ln X y )
P( X e ) FX (e )
y
y
derivando con respecto a “y” tenemos:
d
dFX (e y ) dx
y
y
fY ( y )
FY ( y )
f X (e ) e
dy
dx
dy
1 e y I R ( y )
Variable Aleatoria
X: R
X-1(-, x)
Variable Aleatoria Discreta
Sea C (con C ) Soporte contable
f:C R
C = ci : i I N
i) f(ci) 0
ii)
f(c )
iI
i
=1
Usando la transformación X
Función de Probabilidad v.a. Discreta
A cada resultado posible xi se asocia un número f(xi) = P(X(s) = xi)
llamado la probabilidad de xi
Los f(xi) deben satisfacer
f(xi)
•
0 f(xi) 1; i = 1, 2, 3, ... , n
•
S f(xi) = 1
i
El conjunto de pares (xi, f(xi)) se le
denomina Función de Probabilidad
o Cuantia.
x
x1
x2
x3
x4
x5
x6
xn
P(X=5) = f(5) Función de Probabilidad de “masa”
Función de Frecuencia
X(ci) = xi
P(A) =
j i:ci C A
f(c j ) P( x xi )
i
Propiedades función de cuantia:
1. P ( X = xi ) 0
2. S P ( X = xi ) = 1
i
3. Función de Distribución:
F(x) = xS
P ( X = xi ) = xS
f ( xi )
x
x
i
i
Esperanza de una v.a. X
EX xi P( X xi )
i
Varianza de una v.a. X
V X ( xi EX ) 2 P( X xi )
i
Ejemplo: Binomial
Supongamos que de una línea de producción se
extraen n piezas con reemplazo, las cuales
pueden ser defectuosas o no con una
probabilidad “p”.
X: N° de piezas defectuosas en las n
extracciones
Entonces
n k
nk
P( X k ) p (1 p)
k
k = 0, 1, 2,......,n
E X = np
V X = np (1-p)
Notación: X B( n , p )
•Se utiliza en el muestreo de una población
finita con reemplazo.
•También cuando la población es muy grande,
con o sin reemplazo, ya que “p” se hace
relativamente constante.
Función de Distribución v.a. Discreta
F(x)
F(x) = 0
x < x1
1
1
= S f( xi )
x1 x < x2
= S f( xi )
x2 x < x3
= S f( xi )
x3 x < x4
i=1
2
i=1
3
i=1
4
= S f( xi )
i=1
0
P(X=x5) = f(x5) Función de Probabilidad de “masa”
Función de Frecuencia
x
x1
x2
x3
x4
x5
x6
xn
x4 x < x5
Variables Aleatorias Continuas
• Cuando el experimento se realiza sobre un espacio muestral
que está relacionado con escalas intevalares (tales como
mediciones de distancias, volúmenes, pesos, tiempos, velocidad, voltajes,
intensidad, caudal, temperatura etc.)
• Ya que los posibles valores de X en un intervalo, a < x < b,
son infinitos - no enumerables - no podemos hablar del
i-ésimo valor de X = xi; En tales casos se habla se Variables
Aleatorias Continuas, donde Rx es un intervalo o un conjunto
de intervalos; entonces existe una función continua especial
f: R
R
f(x) = lim h 0
P(x < X < x + h)
h
>0
Variables Aleatorias Continuas
Sea X una variable
aleatoria continua. La
función densidad de
probabilidad (pdf) es
una función que
satisface:
f(x) > 0;
f(x)
x Rx
A: un evento
a
x
b
A: { x| a < x b)
f(x) dx = 1
Rx
b
P(A) = P(a < x < b)
f( x ) dx
a
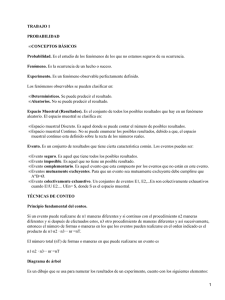
Distribuciones de Probabilidad Continuas
Están definidas por una densidad de v. a. X
f : R R se dice densidad de probabilidad
Propiedades:
1. f (x) 0
2.
f( x)dx 1
-
Observaciones
b
1. P(a x b) f ( x)dx
a
2. F ( x) P( X x)
x
f (t )dt
3. F (-) = 0 ; F () = 1
b
A f ( x)dx
f(x)
4. Fx es no decreciente
5. E X
a
xf ( x)dx
a
|R
6. V X ( x EX ) f ( x)dx
R
2
b
x
Función de Distribución Acumulada
Si X es una variable aleatoria, la Función de Distribución Acumulada
mide la probabilidad de un suceso en un intervalo de valores:
F(x) = P(X x)
Si X es
es una
una v.a.
v.a. Discreta
Discreta
F(x) =
S f(x )
i
i xi x
Donde la suma es
tomada sobre todos los
índices i que satifacen
xi x
Si X es una v.a. Continua
x
F(x) =
f(t) dt
-
Donde la sumatoria es
reemplazada por una
integración para todos los
valores de t x
Construcción de Modelos de Probabilidad
II) Sea F : R
R,
Fu Distribución, entonces:
i) F es no decreciente
ii) F es continua por la derecha
iii) lim F(x) = 0 lim F(x) = 1
Luego P( - , x ) = F(x) define una Probabilidad
Además: P( a,b ) = F(b) - F(a)
P( a,b ) = F(b) - F(a-)
P( a,b ) = F(b-) - F(a)
P( a,b ) = F(b-) - F(a-)
Variables Aleatorias Continuas
Sea X una variable aleatoria
continua que puede tomar
cuarquier valor entre a x b;
cuya pdf es:
f (x )
1
ba
a xb
f(x)
Sea a = 3; b = 12
0,2
A: el evento { 4 < x < 7 }
0,1
Entonces:
7
x
0,0
2
3
4
5
6
7
8
9 10 11 12
a
b
min
máx
P(A) = P(4 < x < 7)
4
1
P(A) =
3
1
9
dx
Distribuciones Continuas Especiales
1. Distribución Uniforme: Dada la función de
densidad
1
f ( x)
ba
a xb
La función de Distribución es
F ( x)
0
xa
xa
ba
a xb
1
xb
ab
EX
2
(b a) 2
V X
12
Notación: X U( a , b )
Distribuciones Continuas Especiales
2. Distribución Normal
1
f ( x)
2
e
1 x 2
2
F(x) : No tiene expresión analítica
, xR
V X 2
E X
Notación: X N( , 2 )
Estandarización
Haciendo
Z
se tiene que:
X
N( 0 , 1 )
1
f z ( z)
e
2
1
z2
2
y FZ(z) se obtiene de tablas !
,zR
Función Densidad de Probabilidades