8. Control Multivariable ejemplo sistemas multivariables
Anuncio

Control de Procesos Industriales
8. Control Multivariable
por
Pascual Campoy
Universidad Politécnica Madrid
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
1
ejemplo
sistemas multivariables
Dado el mezclador de la figura, que trabaja sobre el punto de
quilibrio definido por T10=20, F10=10, T20=80, F20=2 :
Diseñar un control de F y T utilizando ambas variables manipuladas F1 y F2
F1 T1
FC
F2 T2
TC
TT
FT
U.P.M.-DISAM
P. Campoy
Tref
FT
Fref a)
¿qué variable de salida se controla
con qué variable de manipulada?
b) ¿afecta una perturbación de T1 en el
flujo F? ¿cómo?
c) ¿puede calcularse el controlador de
flujo independientemente de
controlador de temperatura?
Control Multivariable 2007/08
2
1
Control multivariable
• Sistemas multivariables y su
problemática de control
• Evaluación de las interacciones
• Emparejamiento de variables
controladas y manipuladas
• Sintonización de controladores
• (Desacoplamiento) suprimido del temario
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
3
Sistemas multivariable: definición
• Son sistemas con varias entradas y salidas, en los que una
entrada afecta a varias salidas y recíprocamente una salida
es afectada por varias entradas
Y1(s) = G11(s) U1(s) +...+G1m(s) Um(s) utilizando la notación matricial:
...
Y (s)
U1(s) G(s) = G11(s) ... G1m(s)
Y(s) = 1
U(s) =
...
...
...
Yp(s) = Gp1(s) U1(s) +...+Gpm(s) Um(s)
Yp(s)
U1(s)
U2(s)
...
Um(s)
G11(s)
G12(s)
+
...
+
Y1 (s)
Um(s)
Gp1(s) ... Gpm(s)
Y(s) = G(s) U(s)
+
G1m(s)
...
...
...
Gp1(s)
Gp2(s)
...
+
+
Yp (s)
+
Gpm(s)
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
4
2
Sistemas multivariables:
problemas para el control
y1ref(s) + u1(s)
GC1(s)
G11(s)
G12(s)
y2ref(s) +
-
GC2(s)
u2(s)
G21(s)
G22(s)
+
y1(s)
+
+
+
y2(s)
• Interacción: efecto de un lazo de control sobre otro lazo
de control, rebotando el efecto sobre el lazo original
• La f.d.t. entre cada salida y
cada entrada cambia en función
del resto de los lazos de control
⇒ No se pueden sintonizar los controladores de cada
lazo de forma independiente
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
5
Control multivariable
• Sistemas multivariables y su
problemática de control
• Evaluación de las interacciones
• Emparejamiento de variables
controladas y manipuladas
• Sintonización de controladores
• Desacoplamiento
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
6
3
Evaluación iteraciones: ejemplo
u1(s)
G11(s)
G12(s)
y2ref(s)
-
GC2(s)
u2(s)
U.P.M.-DISAM
G21(s)
G22(s)
P. Campoy
+
y1(s)
+
+
y2(s)
Control Multivariable 2007/08
7
Evaluación iteraciones: ejemplo
u1(s)
G11(s)
G12(s)
y2ref(s)
-
GC2(s)
u2(s)
U.P.M.-DISAM
P. Campoy
G21(s)
G22(s)
+
y1(s)
+
+
y2(s)
Control Multivariable 2007/08
8
4
Evaluación iteraciones: Matriz de
ganancias estáticas relativas …
Definición:
en la que:
lim
Yi ( s )
los lazos
U j ( s ) todos
abiertos
lim
Yi ( s )
U j ( s ) resto de los lazos
s→0
λij =
s→0
U.P.M.-DISAM
=
cerrados
P. Campoy
yi ( ! )
u j (!) uk=0, k≠j
yi ( ! )
u j (!) yk=0, k≠i
Control Multivariable 2007/08
9
Evaluación iteraciones: … Matriz
de ganancias estáticas relativas
Cálculo
dado:
# y1 (")& #K11 L K1n & # u1 (")&
%
( %
(%
(
% M ( = % M O M (% M (
%$y n (")(' %$K n1 L K nn (' %$un (")('
entonces:
!
λij =
Kij
yi ( ! )
u j (!) yk=0 k≠i
Propiedad:
n
n
!"
ij
=1 y
i =1
U.P.M.-DISAM
donde “o” representa el producto de Hadamard o
producto elemento por elemento
>> K.*inv(K)’
P. Campoy
!"
ij
=1
j =1
Control Multivariable 2007/08
10
5
Análisis de la matriz de
ganancias relativas
λij =
lim Yi (s) U
s→0
lim Yi (s)
s→0
λij →0
j
(s)
U j (s)
todos los lazos abiertos
resto de los lazos cerrados
sintonización en bucle cerrado
0< λ ij<1 menor ganancia estática en bucle abierto
λ ij = 1
sin iteración
1< λ ij
mayor ganancia estática en bucle abierto
λ ij →∞
control imposible en bucle cerrado
cambia de signo la ganancia estática en bucle
cerrado y por tanto la estabilidad del sistema
λij < 0
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
11
Ejercicio evaluación interacciones
Dado el sistema de la figura linealizado para T10=20, F10=10, T20=80, F20=2
F1 T1
F2 T2
FT
a) Calcular λTF1 y λTF2 (5 puntos)
b) Indicar cuál de los dos posibles bucles de control de T queda menos
alterado cuando se abre/cierra el otro bucle de control de la F
(5 puntos)
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
12
6
Control multivariable
• Sistemas multivariables y su
problemática de control
• Evaluación de las interacciones
• Emparejamiento de variables
controladas y manipuladas
• Sintonización de controladores
• Desacoplamiento
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
14
Emparejamiento de variables
controladas y manipuladas
• Criterios restrictivos:
– no cerrar bucle de control de la salida i-ésima con la entrada j-ésima
cuando λij<0
– no cerrar bucle de control de la salida i-ésima con la entrada j-ésima
cuando λij≈∞
– no cerrar bucle de control de la salida i-ésima con la entrada j-ésima
cuando λij=0
• Criterios de prioridad:
– controlar las variables de salida más importantes con aquellas
variables de entrada con las que tengan una dinámica más rápida sin
respuesta inversa
• puede implicar desintonización de los lazos poco importantes
– cerrar bucles de control con λij próximas a 1
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
15
7
Emparejamiento de variables:
ejemplo
a)
Diseñar una estructura adecuada de control multivariable para el
siguiente sistema:
y2ref y1ref -
+
GC2M(s)
+
GC1M(s)
y3ref
GC3M(s)
-
+
u1
e
#
"5s
% "1.2
% 15s +1
% "15s
%
% 60s +1
% " 0.1 "5s
% 15s +1
$
u2
e
u3
e
e
2 "5s
15s +1
"15s
e
60s +1
0.1 "5s
15s +1
e
e
y1
e
y2
e
y3
&
" 0.1 "5s (
15s +1 (
0.2 "5s (
(
15s +1 (
"5s (
15s +1 ('
!
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
17
Control multivariable
• Sistemas multivariables y su
problemática de control
• Evaluación de las interacciones
• Emparejamiento de variables
controladas y manipuladas
• Sintonización de controladores
• Desacoplamiento
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
18
8
Sintonización de controladores
multivariables: desintonización
• Disminuir las interacciones desintonizando los
controladores de las salidas menos importantes
(la desintonización es mayor cuanto menos importante es
el bucle de control)
⇒ sólo haya iteración entre unos poco bucles, que
son los más importantes.
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
19
Sintonización de controladores
multivariables: Reglas de McAvoy
Reglas de sintonización sólo válidas para sistemas de 2x2:
G ( s )G12 ( s )GC 2 M ( s )
Y1 ( s )
= G11 ( s ) ! 21
U1 ( s)
1 + G22 ( s )GC 2 M ( s )
Y1 ( s )
• si el lazo 1 es mucho más rápido que el 2: U ( s) ! G11 ( s)
1
⇒ puede sintonizarse independientemente: GC1M ( s ) = GC1S ( s )
• si el lazo 1 es mucho más lento que el 2:
⇒ la ganancia del controlador se multiplica por λ11
• ambos lazos tienen dinámicas parecidas:
KCM = ≥ 0,5 KCS 0,5< λ<1,5
tCM =
0,5 KCS
1,5<λ
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
Y1 ( s ) G11 ( s )
"
!11
U1 ( s)
GC1M ( s ) = !11GC1S ( s )
2 tCS
tCS
0,5< λ<1
1<λ
20
9
Sintonización multivariable: ejemplo
a)
Calcular los controladores de la estructura de la figura:
y2ref +
y1ref -
GC1M(s)
+
y3ref
GC2M(s)
+
-
GC3M(s)
u1
e
#
"5s
% "1.2
% 15s +1
% "15s
%
% 60s +1
% " 0.1 "5s
% 15s +1
$
u2
e
u3
e
e
2 "5s
15s +1
"15s
e
60s +1
0.1 "5s
15s +1
e
e
y1
e
y2
e
y3
&
" 0.1 "5s (
15s +1 (
0.2 "5s (
(
15s +1 (
"5s (
15s +1 ('
Kc
Ganancia
Ti
Tiempo
integral
PI
0,9 t p
K p tm
3,33 tm
PID
1,2 t p
K p tm
2 tm
Tipo de
regulador
Td
Tiempo
derivativo
0,5 tm
0.9 15
t ic1 = 3.33 x 5 = 16.6
= 1.35
!
2 5
0.9 60
= "21KC 2S = 0.621
= 2.23 t ic 2 = 3.33 x 15 = 50
1 15
KC1M = KC1S =
KC 2M
!
!
KC 3M = KC 3S =
0.9!15
= 2.7
1 5
U.P.M.-DISAM
P. Campoy
!
t ic 3 = 3.33 x 5 = 16.6
Control Multivariable 2007/08
21
!
!
Ejercicio control multivariable
Dado el sistema de la figura linealizado para T10=20, F10=10, T20=80, F20=2
F1 T1
#
1
%
3s
+1
G(s) = %
% "0.8333 e"3s
%$ 10s + 1
F2 T2
1
&
(
3s + 1 (
"3s
(
4.166 e
10s + 1 ('
FT
! control multivariable de T y F (4 puntos)
Diseñar y calcular un
a)
b) Dibujar la volución de las salidas ante un cambio de refrencia de F
y también ante un cambio de referencia de T (3 puntos)
c) Analizar la repercusión de la apertura de cada uno de los bucles de
control sobre el otro bucle (3 puntos)
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
22
10
Ejercicio emparejamiento
incorrecto
Dado el sistema del ejercicio anterior
F1 T1
#
1
%
3s
+1
%
G(s) =
% "0.8333 e"3s
%$ 10s + 1
F2 T2
1
&
(
3s + 1 (
4.166 e"3s (
10s + 1 ('
FT
!
a) Diseñar y calcular un control multivariable, de manera que el
control de T se efectué con F1 y el de F con F2 (5 puntos)
b) Analizar la repercusión de la apertura de cada uno de los bucles de
control sobre el otro bucle (5 puntos)
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
26
Control multivariable
• Sistemas multivariables y su
problemática de control
• Evaluación de las interacciones
• Emparejamiento de variables
controladas y manipuladas
• Sintonización de controladores
• Desacoplamiento
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
29
11
Desacoplamiento:
Objetivo y estructura
• Objetivo: eliminar o reducir las iteracciones
de cada variable de entrada con las variables de
salida distintas de la que controla.
• Estructura (caso 2x2):
m´1
m1
Desacoplador m2
m´2
U.P.M.-DISAM
P. Campoy
Y2(s)
M´1(s) = 0
y1
Sistema
y2
Y1(s)
=0
M´2(s)
Control Multivariable 2007/08
30
Desacoplamiento lineal total:
cálculo de la matriz del desacoplador
m´1(s)
D12(s)
+
+
G (s)
D21(s) = - G21(s)
22
P. Campoy
+
G11(s)
G21(s)
m2(s)
G22(s)
G (s)
D12(s) = - G12(s)
11
y1(s)
+
G12(s)
D21(s)
m´2(s)
U.P.M.-DISAM
+ m1(s)
+
+ y2(s)
+
1
D(s) =
Control Multivariable 2007/08
D12(s)
D21(s) 1
31
12
Desacoplamiento lineal total:
características del desacoplo (1/2)
• Sintonización dependiente de otras f.d.t.:
G11(s)
λ11(s)
G(s)D(s) =
0
0
G22(s)
λ22(s)
• Limitaciones en la realización de desacopladores
análogos a los controladores anticipativos:
K (t s+1) -(t -t )s
D21(s) = - K21(t22s+1) e m21 m22
22 21
• No son robustos ante errores de modelado
cuando la λij es elevada
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
32
Desacoplamiento lineal total:
ejemplo comparativa con y sin desacoplo
F 1 T1
Fref(s)
+
F 2 T2
-
FT
desacopladores:
F1(s)
+
D12(s)
-
GC2D(s)
F2(s)
+
& 0,75 e'5s
0,2 e'5s #
$
!
15s + 1 !
$ 15s + 1
$ ' 0,105 e'15s 0,252 e'15s !
$
!
60s + 1 "
% 60s + 1
F(s)
T(s)
controladores:
)
G
0.105
D21 = ! 21 =
= 0.416
G22 0.252
)
G12
0.2
D12 = !
=!
= !0.26
G11
0.75
U.P.M.-DISAM
+
+
D21(s) +
Tref(s)
+
GC1D(s)
P. Campoy
K C1D = "11 K C1S = 0,9 ! 3,6 = 3,24
tic1 = 3,33 ! 5 = 16,6
K C 2 D = "22 K C 2 S = 0,9 ! 14,28 = 12,852 tic 2 = 3,33 !15 = 50
Control Multivariable 2007/08
34
13
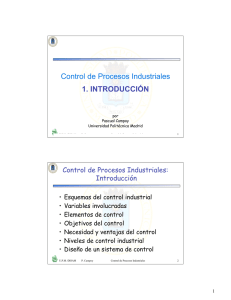
Desacoplamiento lineal total:
ejemplo comparativa con y sin desacoplo
F-Fr
T-Tr
con desacoplo total
sin desacoplo
con desacoplo total
sin desacoplo
F-Tr
T-Fr
con desacoplo total
sin desacoplo
U.P.M.-DISAM
P. Campoy
con desacoplo total
sin desacoplo
Control Multivariable 2007/08
35
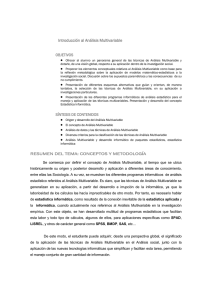
Desacoplamiento lineal total:
ejemplo con error 10% en el modelo
T-Tr
F-Fr
sin error de modelo
con error del 10% en K11 y K22
sin error de modelo
con error del 10% en K11 y K22
F-Tr
T-Fr
con error del 10%
con error del 10%
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
36
14
Desacoplamiento lineal total:
ejemplo con λ elevada
Y1ref(s)
-
+
U1(s)
+
D12(s)
D21(s) +
Y2ref(s)
+
+
+
GC1D(s)
-
GC2D(s)
U2(s)
+
desacopladores:
Y1(s)
( ) = &$'65
( = K * K '1
Y2(s)
T
%
' 5#
6 !"
controladores:
G
0.7875
D21 = ! 21 = !
= !3.125
G22
0.252
)
G
0.2
D12 = ! 12 = !
= !0.26
G11
0.75
U.P.M.-DISAM
& 0,75 e'5s
0,2 e'5s #
$
!
15s + 1 !
$ 15s + 1
'
15
s
'
15
s
$ 0.7875 e
!
0,252 e
$
!
60s + 1 "
% 60s + 1
tic1 = 3,33 ! 5 = 16,6
K C1D = "11 K C1S = 6 ! 3,6 = 21.6
K C 2 D = "22 K C 2 S = 6 ! 14,28 = 85.71
P. Campoy
tic 2 = 3,33 !15 = 50
Control Multivariable 2007/08
37
Desacoplamiento lineal total:
ejemplo con λ11=6 error 10% en el modelo
Y1-Y1ref
Y2-Y2ref
sin error de modelo
con error del 10% en K11 y K22
Y2-Y1ref
Y1-Y2ref
sin error de modelo
con error del 10%
U.P.M.-DISAM
P. Campoy
sin error de modelo
con error del 10% en K11 y K22
sin error de modelo
con error del 10%
Control Multivariable 2007/08
38
15
Desacoplamiento lineal parcial:
objetivo y estructura
• Objetivo: eliminar o reducir la interacción mediante
el desacoplo de la salida más importante del resto
de las entradas
m´1(s)
m1(s)
+
G11(s)
+
G12(s)
D21(s)
m´2(s)
+
+
G21(s)
m2(s)
G22(s)
G (s)
D21(s) = - G21(s)
22
U.P.M.-DISAM
P. Campoy
y1(s)
+ y (s)
2
+
D12(s) = 0
Control Multivariable 2007/08
39
Desacoplamiento lineal parcial:
características
La sintonización del lazo de control de la variable
importante es independiente de las otras f.d.t. del sistema,
pudiéndose considerar el resto de la entradas como
perturbaciones a dicho lazo de control
G11(s) G (s)
G(s)D(s) = λ11(s) 12
G22(s)
0
La sintonización de los otros lazos de control depende de
otras f.d.t. ajenas al lazo
El comportamiento del lazo de control de la variable
importante es más sensible a errores de modelo a medida
que crece su ganancia estática relativa
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
40
16
Desacoplamiento lineal parcial:
ejemplo con λ11=0,9 error 10% en el modelo
sin error de modelado
con error 10% en K11 y K22
T-Tr
T-Tr
desacoplo total
desacoplo parcial
desacoplo total y
desacoplo parcial
F-Tr
F-Tr
desacoplo total
desacoplo parcial
U.P.M.-DISAM
P. Campoy
desacoplo total
desacoplo parcial
Control Multivariable 2007/08
41
Desacoplamiento lineal total:
ejemplo con λ11=6 error 10% en el modelo
sin error de modelado
con error 10% en K11 y K22
Y2-Y2r
desacoplo total y
desacoplo parcial
desacoplo total
desacoplo parcial
Y1-Y2r
Y1-Y2r
desacoplo total
desacoplo parcial
U.P.M.-DISAM
P. Campoy
Y2-Y2r
desacoplo total
desacoplo parcial
Control Multivariable 2007/08
42
17
Desacoplamiento no-lineal:
objetivo
• Objetivo: reducir la interacción en sistemas en
los que su comportamiento no-lineal de lugar a
un mal funcionamiento de los desacopladores
lineales
m´1
m´2
m1
Desacoplador
no-lineal
U.P.M.-DISAM
P. Campoy
y1
Sistema
m2
y1≈f1(m'1 )
y2
y2≈f2(m'2 )
Control Multivariable 2007/08
43
Desacoplamiento no-lineal:
estructura del desacoplador
Desacoplamiento no-lineal por inversión del
modelo estático.
modelo estático:
y1 = f1 (m1,m2 ) "
#
y 2 = f 2 (m1,m2 )$
inversión del modelo:
m = g (y , y ) #
" 1 1 1 2 $
m2 = g2 (y1, y 2 )%
y=f(m)
!
m=f-1(y)
m´!1
m´2
m=f-1(m') m1
(inversión del
modelo estático
del sistema)
m2
cálculo de entradas:
m1 = g1 ( m1", m"2 ) #
$
m2 = g2 ( m1", m"2 )%
m=f-1(m')
!
y1
Sistema y
2
En régimen permanente y sin error de modelado: y≡m'
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
44
18
Desacoplamiento no-lineal:
caracteristicas
útil en sistemas fuertemente no-lineales
no tiene en cuenta la dinámica del sistema
U.P.M.-DISAM
P. Campoy
Control Multivariable 2007/08
45
Desacoplamiento no-lineal:
ejemplo
ecuaciones estáticas:
F 1 T1
F 2 T2
inversión del modelo:
F = F1 + F2 #
"
TF = T1 F1 + T2 F2 !
FT
m´1
m´2
U.P.M.-DISAM
T2 ! m2"
T2 ! T1
T1 ! m2"
F2 = m1"
T1 ! T2
F1 = m1"
P. Campoy
T2 % T
$
!!
T2 % T1
#
T %T
F2 = F 1
= F % F1 !
!"
T1 % T2
F1 = F
F1
F
Sistema
F2
Control Multivariable 2007/08
T
46
19