Lección 7: Cambios de fase y fenómenos cr´ıticos
Anuncio

Lección 7: Cambios de fase y fenómenos crı́ticos
En la primera parte del curso hemos estudiado ciertas propiedades de los
sistemas fı́sicos que fluctúan aleatoriamente en el tiempo y que por lo tanto,
pueden ser descritas como procesos estocásticos. Hemos visto que muchos
de éstos son estacionarios, y en determinadas circunstancias (si el sistema
es cerrado y aislado) representan un estado del sistema que es de equilibrio. Dicho estado está caracterizado por un determinado número de variables macroscópicas que no varı́an con el tiempo (variables termodinámicas).
Éstas pueden ser extensivas, cuando son proporcionales al número de constituyentes elementales del sistema como la energı́a o la entropı́a, o intensivas,
cuando no dependen de dicho número, como la presión, la temperatura o el
potencial quı́mico. La fı́sica estadı́stica, con la teorı́a de colectividades, permite relacionar la dinámica microscópica de los constituyentes elementales
con las propiedades termodinámicas observadas en el sistema.
En esta capı́tulo nos centraremos principalmente en la fenomenologı́a asociada a las variables termodinámicas que describen el estado macroscópico
del sistema, en particular a los llamados cambios de fase. La aparición de un
cambio de fase está asociado a la existencia de puntos crı́ticos en el diagrama
de fases que caracteriza el sistema (o espacio abstracto que relaciona las distintas variables termodinámicas independientes), que son puntos singulares
donde hay cambios de analiticidad en las derivadas de ciertas variables termodinámicas, y separan diferentes fases cuyo comportamiento macroscópico
puede diferir dramáticamente.2
Generalmente, los sistemas están más ordenados a temperaturas bajas
pues las fuerzas de cohesión comienzan a superar al movimiento térmico
y los átomos pueden reajustarse en estados más ordenados. Los cambios
de fase ocurren a una temperatura crı́tica, y se manifiestan en una escala
macroscópica conforme nos aproximamos a la temperatura crı́tica.
Funciones convexas y transformadas de Legendre: Potenciales termodinámicos
Una función convexa es una función g(x) tal que g 00 (x) > 0. Se define
entonces una transformada de Legendre ḡ(p) de g como
ḡ(p) = xp − g(x)
2
(407)
Notad que no es necesario que un sistema se encuentre en una situación de equilibrio
para presentar cambios de fase y criticalidad.
85
donde x(p) está implicitamente definido como la raı́z para p dada de la
ecuación:
∂g
(408)
p=
∂x
La convexidad de la función g garantiza que la ecuación definiendo x(p)
puede resolverse para cualquier p que esté entre el máximo y el mı́nimo de
las derivadas de g. Esto garantiza que ḡ(p) está bien definida. Es sencillo ver
que la transformada de Legendre es invertible (Hacerlo como ejercicio).
Potenciales termodinámicos.
Supongamos un sistema en equilibrio termodinámico caracterizado por
variables extensivas (U, X, N ) (En un fluido X = V y en un magneto X = M )
y variables intensivas (T, Y, µ) (en un fluido Y = −P y en un magneto Y = B) que son funciones de (U, X, N ), y existe una función entropia
S = S(U, X, N ) que contiene toda la información termodinámica del sistema en el estado de equilibrio (S = k ln Ω(U, X, N )). Las variables intensivas se obtienen como derivadas de S. Se dice entonces que S es un potencial termodinámico. Cuando uno expresa S = S(U, X, N ), se está en representación de entropı́as. Es más conveniente trabajar con la energı́a interna U
y siempre podemos poner U = U (S, X, N ) (Esto siempre se puede realizar si
T (U, X, N ) ≥ 0). En este caso se está en representación de energı́as. Usando
las leyes de la termodinámica y el hecho de que S es una variable extensiva se
puede obtener la ecuación fundamental de la termodinámica que establece:
X
TS = U − Y X −
µj Nj (Ecuación de Euler)
(409)
j
(Ejercicio: hacerlo) donde estamos considerando la posibilidad de que hay
diferentes tipos de partı́culas y hemos utilizado que
∂S ∂S ∂S 1
−Y
−µj
;
.
(410)
= ;
=
=
∂U X,{Nj } T
∂X U,{Nj }
T
∂Nj U,X,{Ni6=j }
T
Despejando la energı́a interna finalmente queda:
X
U = TS + Y X +
µj Nj = U (S, X, N )
(411)
j
A partir de este potencial termodinámico podemos construir otros mediante
transformadas de Legendre, ası́ obtenemos:
86
Potencial de Helmholtz o energı́a libre (F = −kT ln Z). Se obtiene a
partir del potencial termodinámico U realizando la transformada de
Legendre sobre la variable S :
∂U F (T, X, N ) = U (S, X, N ) − T S
con T =
(412)
∂S X,{Nj }
y su diferencial es
dF = −SdT + Y dX +
X
µj dNj
(413)
j
Entalpı́a (H). Se obtiene a partir de la energı́a interna como tranformada de Legendre sobre la variable X y es:
∂U (414)
H(S, Y, N ) = U (S, X, N ) − Y X
con Y =
∂X S,{Nj }
y su diferencial es
dH = T dS − XdY +
X
µj dNj
(415)
j
El potencial o energı́a libre de Gibbs (G). Se obtiene a partir del potencial termodinámico U realizando la transformada de Legendre sobre
las variables S, X :
∂U ∂U G(T, Y, N ) = U −T S−XY
con T =
; Y =
∂S ∂X X,{Nj }
S,{Nj }
(416)
y su diferencial es
dG = −SdT − XdY +
X
µj dNj
(417)
j
El potencial macrocanónico (F = −kT ln Ξ). Se obtiene a partir del
potencial termodinámico U realizando la transformada de Legendre
sobre las variables S, {Nj } :
X
∂U ∂U ; µj =
F (T, X, µ) = U −T S−
µj N j
con T =
∂S
∂Nj S,X{Ni6=j }
X,{N
}
j
j
(418)
y su diferencial es:
dF = −SdT + Y dX −
87
X
j
Nj dµj
(419)
Coexistencia de phases: Regla de Gibbs
En el punto en el que el cambio de fase ocurre dos o más fases pueden coexistir en equilibrio con las otras. Puesto que las fases pueden intercambiar
materia y energı́a, la situación de equilibrio ocurre cuando los potenciales
quı́micos de las fases se hacen iguales para un valor dado de las variables
intensivas Y y T (los potencials quı́micos son función sólo de variables intensivas). De la condición de equilibrio se puede determinar el número máximo
de phases que pueden coexistir y de las ecuaciones que definen las regiones
de coexistencia (ecuación de Clausius-Clapeyron). Generalmente, las fases
que coexisten están en equilibrio térmico y mecánico y pueden intercambiar
energı́a y materia. Bajo estas condiciones la temperatura y los potenciales
quı́micos de las fases deben ser iguales y en el caso de un sistema P V T
las presiones de las dos fases pueden ser iguales que garantiza el equilibrio
mecánico. Por simplicidad consideremos un sistema puro (compuesto por un
sólo tipo de partı́cula) Y XT. En este caso dos fases I y II pueden coexistir
para un valor fijo de Y y T si
µI (Y, T ) = µII (Y, T )
(420)
que se conoce como regla de Gibbs de la coexistencia de fases y permite
obtener:
Y = Y (T )
(421)
que en el plano Y − T define la curva de coexistencia de las dos fases. Si el
sistema tuviera tres fases, I II y III, estas sólo pueden coexistir en un sólo
punto en el plano Y − T, esto es el punto triple. Éste queda univocamente
determinado por la regla de Gibbs de la coexistencia de las tres fases,
µI (Y, T ) = µII (Y, T ) = µIII (Y, T )
(422)
Consecuencia de esto es que en un sistema puro no puede haber cuatro fases
coexistiendo (Ejercicio: Por qué?)
Si tenemos una mezcla de l diferentes tipos de partı́culas entonces pueden
coexistir como máximo l + 2 fases. Si hay l tipos de partı́culas en cada fase
habrá l + 1 variables independientes en cada fase, esto es (Y, T, x1 , . . . , xl−1 )
donde xi son las fractiones molares de cada tipo de partı́cula (la otra fracción
molar es dependiente). Los potenciales quı́micos de cada tipo de partı́cula
debe ser el mismo en todas las fases. La regla de Gibbs para la coexistencia
88
de fases queda en este caso como:
µI1 (Y, T, xI1 , . . . , xIl−1 ) =
=
I
I
I
µ2 (Y, T, x1 , . . . , xl−1 ) =
=
II
II
µII
1 (Y, T, x1 , . . . , xl−1 ) = . . .
µr1 (Y, T, xr1 , . . . , xrl−1 ).
II
II
µII
2 (Y, T, x1 , . . . , xl−1 ) = . . .
µr2 (Y, T, xr1 , . . . , xrl−1 ).
..
.
(423)
II
II
µIl (Y, T, xI1 , . . . , xIl−1 ) = µII
l (Y, T, x1 , . . . , xl−1 ) = . . .
r
r
r
= µl (Y, T, x1 , . . . , xl−1 ).
que constituyen un conjunto de l(r−1) ecuaciones para determinar 2+r(l−1)
incognitas. Para que haya solución el número de ecuaciones no debe ser mayor
que el número de incógnitas, esto es l(r − 1) ≤ 2 + r(l − 1) o r ≤ l + 2.
Clasificación de los cambios de fase
Como hemos dicho antes conforme cambiamos las variables independientes intensivas (Y, T, x1 , . . . , xl−1 ) alcanzamos valores para los cuales ocurre
un cambio de fase. En tales puntos los potenciales quı́micos de las fases deben
ser iguales y las fases pueden coexistir.
La ecuación fundamental para la energı́a libre de Gibbs en un sistema
con l tipos diferentes de moléculas es
G=
l
X
µj nj ,
(424)
j=1
donde nj es el número de moles (partı́culas) del constituyente j y µj es su
potencial quı́mico. En procesos que ocurren a Y y T constante los cambios
en la energı́a libre de Gibbs son:
[dG]T,Y =
l
X
µj dnj
(425)
j=1
de donde en un cambio de fase las derivadas µj = (∂G/∂nj )T,Y,{ni6=j } deben
de ser iguales y la energı́a libre de Gibbs de cada fase tiene el mismo valor
(Por qué?). Sin embargo, no hay ninguna condición sobre las derivadas
X = −(∂G/∂Y )T,{nj } y S = −∂G/∂T )Y,{nj } . El comportamiento de estas derivadas se utiliza, sin embargo, para clasificar los cambios de fase. Si
(∂G/∂Y )T,{nj } y ∂G/∂T )Y,{nj } son discontinuas en el punto de la transición
(es decir si X y S tienen valores diferentes en las dos fases) el cambio de fase
se dice que es de “primer orden”. Si son continuas en el punto de la transición
89
pero las derivadas de órdenes superiores son discontı́nuas entonces el cambio
de fase se dice que es “continua”.3
Vamos a particularizar para el caso de un sistema P V T. En un cambio de
fase de primer order una discontinuidad de ∂G/∂P )T,{nj } significa que hay
una discontinuidad en el volumen de las dos fases,
I
II
∂G
∂G
I
II
−
(426)
∆V = V − V =
∂P T,{nj }
∂P T,{nj }
y una discontinuidad en ∂G/∂T )Y,{nj } significa que hay una discontinuidad
en la entropia de las dos fases,
I
II
∂G
∂G
I
II
∆S = S − S =
−
(427)
∂T P,{nj }
∂T P,{nj }
puesto que G es la misma entonces la ecuación fundamental H = G + T S
muestra que la entalpı́a es diferente en las dos fases en un cambio de fase de
primer orden,
∆H = T ∆S.
(428)
A ∆H se le llama calor latente del cambio de fase. La existencia de este calor
latente da cuenta de que la estructura interna del sistema (simetrı́as) cambia
dramáticamente cerca del punto de transición.
Para un cambio de fase continuo, G es continua pero su pendiente cambia
rápidamente, lo que se traduce en un pico en el capacidad calorı́fica a presión
constante en el punto de la transición. Tampoco hay un cambio abrupto en
la entropı́a.
Cambios de fase en fluidos
Consideremos un fluido que viene descrito por la ecuación de estado
f (P, ρ, T ) = 0, que relaciona los variables intensivas termodinámicas presión, la densidad ρ = N/V ≡ 1/v y temperatura. La ecuación de estado
define una superficie en un espacio tridimensional. La proyección de esa superficie en el plano P − T produce tres regiones separadas correspondientes
a las fases sólida, lı́quida y gaseosa (ver figura 2 derecha). Las fases sólida
y gaseosa están en equilibrio a lo largo de la curva de sublimación, las fases sólida y lı́quida están en equilibrio a lo largo de la curva de fusión y las
3
El término cambio de fase de orden n fue introducido por Ehrenfest pra indicar un
cambio de fase para el cual la derivada enésima de G es la primera derivada discontı́nua.
Sin embargo, para algunos sistemas, las derivadas de orden más alto son infinitas y la
teorı́a de Ehrenfest no es aplicable en estos casos.
90
Figura 1: Comportamiento tı́pico de la energı́a libre de Gibbs en un cambio
de fase de primer orden.
fases lı́quida y gaseosa en equilibrio a lo largo de la curva de vaporización.
Cada punto de esas curvas representa un estado de equilibrio en el cual dos
o más fases pueden coexistir. El punto triple A corresponde a un estado de
equilibrio donde las tres fases coexisten. Podemos ver que la curva de vaporización no se extiende sin lı́mite sino que acaba en un punto llamado punto
crı́tico (Pc , ρc , Tc ). La existencia del punto crı́tico en la curva de vaporización
significa que podemos convertir lı́quido en gas de forma continua sin pasar
por el punto de transición. En este sentido no hay diferencias entre las fases
lı́quida y gaseosa. Una condición necesaria para que obtengamos gotas de
fluido condensado es que lo podamos llevar por debajo de Tc .
De la figura 2 derecha se observa que a bajas temperatura (T < Tc ) hay
una diferencia importante entre las densidades del gas (ρG ) y el lı́quido (ρL )
cuando están coexistiendo. Conforme nos acercamos a la temperatura crı́tica
dicha diferencia de densidades tiende a cero. La existencia de una magnitud
que es distinta de cero por debajo de Tc y cero por encima, es una propiedad
común asociada a la existencia de puntos crı́ticos en los sistemas fı́sicos. Se
dice que ρL − ρG es el parámetro de orden del punto crı́tico gas-lı́quido.
Por otra parte a temperaturas muy altas T Tc el gas tiene un comportamiento ideal y se cumple P v = RT y por lo tanto las isotermas son
91
Figura 2: Derecha: Curvas de coexistencia de fases en un sistema puro P V T.
El punto A es un punto triple y C es un punto crı́tico. La lı́nea discontı́nua
muestra un ejemplo de curva de fusión con pendiente negativa. Izquierda:
Proyección P − v del sistema anterior mostrando las isotermas. Todos los
cambios de fase son de primer orden.
lı́neas rectas. Conforme nos acercamos a Tc por encima las isotermas dejan
de ser lı́neas rectas lo que indica que el gas deja de tener comportamiento
ideal. Esto es debido a que al bajar la temperatura aparece el efecto de interacciones entre las moléculas, que implica la aparición de correlaciones. Estas
correlaciones resultan en la formación de gotas de fluido que cuando alcanzan
la dimensión de la longitud de onda de la luz pueden dispersarla fuertemente
dando lugar al fenómeno de la opalescencia crı́tica. La formación de gotas
implica fluctuaciones en la densidad cerca del punto crı́tico.
La figura 2 derecha muestra que las isotermas tienen una porción plana
en una vecindad del punto crı́tico, es decir −1/vKT = (∂P/∂v)T → 0 conforme T → Tc+ , que resulta en una divergencia de KT . Como consecuencia
la respuesta de la densidad a fluctuaciones muy pequeñas de la presión es
infinita (las fluctuaciones de la densidad divergen en el punto crı́tico). Para
T < Tc la existencia de un calor latente hace que las fluctuaciones en la densidad no crezcan como consecuencia de un pequeña variación en la presión.
La explicación está en que una pequeña variación positiva en la presión condensa por ejemplo el gas contenido en un elemento de volumen y se emite un
calor latente que tiende a restaurar el equilibrio calentando el lı́quido condensado previamente. En el punto crı́tico el calor latente no puede restaurar
el equilibrio y se tiene un crecimiento sin lı́mite de las fluctuaciones de la
densidad.
92
Funciones respuesta: El calor especı́fico y la compresibilidad
Estas son el calor especı́fico a volumen Cv y presión constante CP que
miden la absorción de calor ante un estı́mulo de la temperatura, y la compresibilidades isoterma KT y adiabática KS que miden la respuesta del volumen
ante un variación de la presión. Se tiene por definición que:
dQ
∂S
Cx =
=T
(429)
dT x
∂T x
de donde
CV = −T
∂2F
∂T 2
CP = −T
V
y para la compresibilidades se tiene:
1
Kx = −
V
∂V
∂P
∂2G
∂T 2
(430)
P
(431)
x
de donde tenemos
1
KT = −
V
∂2G
∂P 2
1
KS = −
V
T
∂2G
∂P 2
(432)
S
de donde las condiciones de estabilidad de un sistema termodinámico en equilibrio ante pequeñas fluctuaciones en la temperatura y la presión se reducen
a C > 0 y K > 0.
Cambios de fase en sistemas magnéticos. Analogı́a con
los fluidos
Consideremos por ejemplo un sistema ferromagnético en contacto con un
baño térmico y sometido a la acción de un campo magnético externo B.
En estas condiciones las variables que determinan el comportamiento termodinámico del mismo son la intensidad del campo magnético B que es la
fuerza generalizada que produce un desplazamiento o variación de la magnetización M del sistema, y la temperatura T . Se trata entoces de un sistema
BM T. Análogamente a un fluido cuando se incrementa la presión la densidad
aumenta, al incrementar la intensidad del campo magnético se produce un
incremente de la magnetización. Las proyecciones de la superficie BMT en
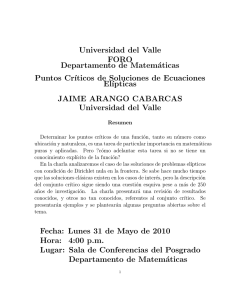
los planos BT, BM y MT vienen representadas en la figura 3.
En este caso la primera ley de la termodinámica se escribe
dU = dQ + BdM
Similarmente tenemos los siguiente potenciales termodinámicos:
93
(433)
B
T< T C
T= T C
T=0
T> T C
B=0
Tc
M
T
T=0
M
M(T)
T
T
C
Figura 3: Proyecciones de la superficie BMT para un sistema magnético
94
Energı́a libre F = F (T, M ) = U − T S con dF = −SdT + BdM
La entalpı́a H = H(S, B) = U − BM con dH = T dS − M dB
El potencial de Gibbs G = G(T, B) = U − T S − BM con dG =
−SdT − M dB.
Al igual que en el caso de un fluido con la compresibilidad isoterma KT ,
ahora tenemos una función respuesta para un sistema magnético que es la
suceptibilidad isoterma χT = (∂M/∂B)T que diverge cerca de Tc correspondiendo al aplanamiento de la isoterma crı́tica en la figura 3 (panel de arriba
derecha). Asociada con la divergencia de esta función respuesta hay un incremento enorme de las fluctuaciones de la magnetización y una relación que
asocia χT con dichas fluctuaciones.
Funciones respuesta en sistemas magnéticos
En un sistema magnético tenemos el calor absorvido cuando variamos la
temperatura a magnetización M y campo B constantes, es decir
2 2 ∂ G
∂ F
CB = −T
(434)
CM = −T
2
∂T M
∂T 2 B
y en vez de las compresibilidades tenemos las suceptibilidades isoterma y
adiabática que miden la variación de la magnetización en respuesta a una
variación del campo magnético a temperatura y entropı́as constantes, y están
definidas como
2 2 ∂M
∂ G
∂M
∂ H
χT =
=−
χS =
=−
(435)
2
∂B T
∂B T
∂B S
∂B 2 S
Exponentes crı́ticos y relaciones entre ellos
En las últimas décadas el estudio de los fenómenos crı́ticos se ha centrado
cada vez más en los valores de un conjunto de ı́ndices llamados exponentes
crı́ticos que describen el comportamiento cerca del punto crı́tico de ciertas
magnitudes de interés.
Supongamos una determinada función f () que representa a una magnitud fı́sica y queremos estudiar su comportamiento cerca del punto crı́tico.
Aquı́ representa la distancia relativa al punto crı́tico esto es:
=
T
T − Tc
=
− 1.
Tc
Tc
95
(436)
Suponemos que f () es definida positiva y continua para valores positivos y
suficientemente pequeños de , y que el lı́mite
λ = lim→0
ln f ()
ln (437)
existe. Este lı́mite, λ, se llama exponente crı́tico de la función f () e implica
que f () ∼ λ . En este punto hay que decir que lo anterior no implica que
f () = Ax (x = λ), aunque lo contrario si se cumple. En general se tiene
f () = Ax (1 + By + . . .)(y > 0)‘
(438)
Por qué se estudian los exponentes crı́ticos, si parece que dan menos información que la forma funcional completa. La respuesta está en el hecho
experimental de que cerca del punto crı́tico el primer término domina, y
por tanto una representación log-log de los datos experimentales permite determinal λ. Ası́ los exponentes crı́ticos se pueden medir experimentalmente
mientras que la función entera no. Además como veremos existen un gran
número de relaciones entre diferentes exponentes crı́ticos que surgen de consideraciones termodinámicas y mecanico estadı́sticas fundamentales y por lo
tanto aplicables a cualquier sistema.
El caso en que λ = 0 no se corresponde un un único tipo de comportamiento. Podemos tener una divergencia logarı́tmica, o una singularidad
tipo cúspide, o una función perfectamente analı́tica con la única anomalı́a
de tener una discontinuidad de salto. Puesto que estos tres comportamiento
difieren podemos introducir otro tipo de exponente crı́tico que permite distinquir entre una sigularidad logarı́tmica y una cúspide. Para encontrar el
exponente λ que describe la parte singular de una función con un cúspide
debemos encontra el valor del entero más pequeño tal que ∂ j f /∂j diverge
para → 0. Definimos entonces
λs = j + lim→0
ln |f (j) ()|
ln (439)
Exponentes crı́ticos α, β, γ, δ, ν, η
Vamos a introducir los exponentes crı́ticos más comunes que se estudian
en fluidos y sistemas magnéticos.
Exponente β. Describe el comportamiento del parámetro de orden cerca
del punto crı́tico. De las figuras que muestran la dependencia con la
temperatura de la diferencia de densidades del lı́quido y el gas para un
96
fluido y la magnetización a campo nulo M0 (T ) de un ferromagneto, es
natural una dependencia con la temperatura cerca de Tc en la forma:
{ρL (T ) − ρG (T )}/2ρc = B(1 − T /Tc )β [1 + . . .]
(440)
M0 (T )/M0 (0) = B(1 − T /Tc )β [1 + . . .]
(441)
y
o abreviadamente ∆ρ = ρL − ρG ∼ (−)β y M ∼ (−)β . Las normalizaciones ρc y M0 (0) se incluyen para que el coeficiente B varı́e muy poco
de un sistema a otro (generalmente es del orden de la unidad).
Exponente γ. Las isotermas en el diagrama P V y BM para un fluido y
un magneto tienen pendientes que son proporcionales respectivamente
al inverso de la compresibilidad isoterma KT y de la suceptibilidad
isoterma χT . Aunque ambas divergen para T → ∞ debemos distinguir
si nos acercamos al punto crı́tico por encima o por debajo. Entonces
definimos los exponentes γ y γ 0 en la forma
0
0
C (−)−γ (1 + . . .) [T < Tc , ρ = ρL oρG (T )]
0
KT /KT =
(442)
C −γ (1 + . . .)
[T > Tc , ρ = ρc ]
para un fluido y
χT /χ0T
=
0
C 0 (−)−γ (1 + . . .) [T < Tc ,
C −γ (1 + . . .)
[T > Tc ,
B = 0]
B = 0]
(443)
donde KT0 = 1/Pc0 = 1/ρc KTc es la compresibilidad de un gas ideal de
densidad ρc a la temperatura T = Tc . Similarmente χ0T es la suceptibilidad de un sistema paramagnético evaluada en el punto crı́tico. Con
la definiciones anteriores γ y γ 0 son positivos.
Exponente δ. Describe la variación de P − Pc con ρ − ρc y B con M a
lo largo de la isoterma crı́tica T = Tc .
(P − Pc )/Pc0 = D|ρ/ρc − 1|δ sgn(ρ − ρc )[T = Tc ]
(444)
B/Bc0 = D|MB (T = Tc )/M0 (T = 0)|δ [T = Tc ]
(445)
y
donde como antes Pc0 es la presión de un gas ideal con densidad ρc a
la temperatura Tc , y Bc0 = kTc /m0 con m0 el momento magnético por
espı́n. Ası́ este exponente sirve para determinar el grado de la isoterma
crı́tica. Abreviadamente escribimos ∆P ∼ (∆ρ)δ y B ∼ M δ . Cuanto
mayor es δ más plana es la isoterma crı́tica (y más dificil es determinarlo
experimentalmente).
97
El exponente α. Describe el comportamientod el calor especı́fico en la
vecindad del punto crı́tico y se define como:
0
0
A (−)−α (1 + . . .) [T < Tc , ρ = ρL o ρG (T )]
CV =
(446)
A −α (1 + . . .)
[T > Tc , ρ = ρc ]
para un fluido y
CM =
0
A0 (−)−α (1 + . . .) [T < Tc ,
A −α (1 + . . .)
[T > Tc ,
B = 0]
B = 0]
(447)
para un sistema magnético. Experimentalmente los exponentes α y α 0
son cero o muy pequeños. Para α = 0 en algunas medidas se corresponde con una singularidad logarı́tmica y en otros caso con una
cúspide en cuyo caso αs 6= 0
Exponentes ν y η. Describen el comportamiento de la función de correlación a dos cuerpos en el punto crı́tico. La longitud de correlación ξ
es una medida del rango de la función de correlación y se tiene
0
0
ξ0 (1 − T /Tc )−ν [T < Tc , B = 0]
(448)
ξ=
ξ0 (T /Tc − 1)−ν [T > Tc , B = 0]
En muchos casos la función de correlación decrece con la distancia r
siguiendo una ley de potencias en la forma:
G(r) ∼
W
r d−2+η
[T = Tc ; P = Pc (B = 0)]
(449)
que me define el exponente crı́tico η. Aquı́ d es la dimensión del sistema.
Exponentes diferencia ∆0l y ∆2l . En el caso de un sistema magnético
hemos visto que la magnetización espontánea y la suceptibilidad a campo nulo son proporcionales respectivamente a la primera y segunda
derivada del potencial de Gibbs con relación al campo B (y evaluadas
en B = 0). En 1963 Essam y Fisher sugirieron que uno podrı́a considerar derivadas de orden superior definiendo una secuencia de exponentes
∆0l en la forma
0
(∂ l G/∂B l )T ≡ G(l) ∼ (1 − T /Tc )−∆l G(l−1)
(450)
entonces se obtiene Ejercicio que
∆01 = 2 − α0 − β
98
(451)
y
∆02 = β + γ 0
(452)
En algunos sistemas se tiene ∆01 = ∆02 (por ejemplo el modelo de ising
en d = 2) lo que permite relacionar α0 , β y γ 0 en la forma
α0 + 2β + γ 0 = 2.
(453)
Para T > Tc todas las derivadas impares de G(T, B) son cero cuando
están evaluadas en B = 0, y sólo nos quedan las derivadas pares que
van como:
(∂ 2l G/∂B 2l )T ≡ G(2l) ∼ (T /Tc − 1)−2∆2l G(2l−2)
(454)
El exponente de la curvatura de la presión de vapor θ. De la diferencial
del potencial de Gibbs se obtiene:
CV = T V (∂ 2 P/∂T 2 )V − T N (∂ 2 µ/∂T 2 )V
(455)
Si CV es singular en T = Tc entonces cada una de las derivadas segundas
anteriores o las dos son singulares en T = Tc . Se define entonces el
exponente θ por
2 ∂ P
∼ (1 − T /Tc )−θ
(456)
∂T 2
y es una medida del grado de divergencia de la curvatura de la curva
de vaporización cuando T → Tc−
Desigualdades entre exponentes
Las únicas relaciones rigurosas entre exponentes crı́ticos son un conjunto
de desigualdades. Para la obtención de las mismas usaremos el lema siguiente:
Lemma: Sea f (x) ∼ xλ , g(x) ∼ xϕ y sea f (x) ≤ g(x) para x pequeño y
positivo. Entonces λ ≥ ϕ.
Desigualdad de Rushbrooke. Se obtiene para un sistema magnético para
B = 0 y T → Tc− y es
α0 + 2β + γ 0 ≥ 2
(457)
que se obtiene trivialmente sin más que usar la relación entre funciones
respuesta
2
χT (CB − CM ) = T αB
(458)
con αB = (∂M/∂T )B , y el lema anterior.
99
La desigualdad de Coopersmith: T = Tc y B → 0+ . El procedimiento
para obtenerla es el mismo que en el caso anterior pero ahora hay que
hacer B → 0 y tomar T = Tc . Ası́ se tiene M ∼ B 1/δ y χT ∼ B 1/δ−1 .
Si introducimos ahora los exponentes ϕ y ψ en la forma
CB ∼ B −ϕ ∼ M −ϕδ
[T = Tc ]
(459)
y
S(B) ∼ −B ψ ∼ M ψδ
(460)
Finalmente utilizando la relación de Maxwell (∂M/∂T )B = (∂S/∂B)T
se obtiene:
ϕ + 2ψ − 1/δ ≥ 1.
(461)
La desigualdad de Griffiths.
α0 + β(1 + δ) ≥ 2
100
(462)
Caracteriazación de Yang-Lee de las cambios de fase
Yang y Lee caracterizaron cuando una transición de fase tiene lugar usando argumentos muy sencillos que involucran la función de partición macrocanónica. La teorı́a es la siguiente:
Supongamos un sistema clásico de partı́culas interactuando mediante
un potencial v(|qij |), esferas duras con atracción de corto alcance:
∞
|qij | < a
v(|qij |) =
−
a ≤ |qij | ≤ b
(463)
0
b ≤ |qij |
Consideremos una caja de volumen finito V. Debido a que las partı́culas
son esferas duras, tenemos un número finito M de ellas en la caja. La
función de partición macrocanónica se escribe entonces como
1
N (N −1)
N
M
2 X
2
βµN Z Z
X
X
pi
e
1
N
N
v(|q
|)
dp
dq
exp
β
+
Ξ(T, V, µ) =
ij
N !h3N
2m 2 i<j=1
i=1
N =0
M
X
eβµN
=
QN (V, T ),
λ3N N !
N =0 T
(464)
donde λT es la longitud de onda térmica (y resulta de hacer las integraciones sobre los momentos y se pueden hacer pues estamos considerando sistemas clásicos) y QN (V, T ) es la integral configuracional definida
como
(
)
Z
X
QN (V, T ) = dqN exp −β
V (|qij |)
(465)
i<j
Para N > M QN (V, T ) = 0 debido la región de esferas duras en el
potencial. Introduciendo la variable y = eβµ /λ3T se tiene:
Ξ(T, V, y) =
M
X
N =0
yN
QN (V, T )
N!
(466)
que para volumen finito es un polinomio de orden M en y con coeficientes positivos y reales. Este polinomio se puede poner en la forma
M Y
y
(467)
Ξ(T, V, y) =
1−
y
i
i=1
101
donde yi son la raı́ces del polinomio. Puesto que los coeficientes QN /N !
son reales y positivos ninguna de las raices yi puede ser real y positiva
para M finito. Deben ser reales y negativas o complejas. Conforme V
se incrementa el número de raices M se incrementa (linealmente con
V ). Su distribución en V → ∞ da el comportamiento analı́tico de las
funciones termodinámicas en el plano y. En dicho lı́mite algunas raices
pueden tocar el eje real positivo, por ejemplo y0 . Cuando esto ocurre
tiene lugar una transición de fase puesto el sistema tiene un comportamiento diferente para y < y0 y y > y0 . En general la presión P (y)
puede ser continua a través del punto y0 pero la densidad o derivadas
de órdenes superiores de P son discontinuas. La presión y la densidad
se definen como:
1
P = kT lı́m
ln Ξ(V, T, y)
V →∞ V
(468)
∂ 1
1
hN i
= lı́m
= lı́m y
ln Ξ(V, T, y)
V →∞ V
V →∞
v
∂y V
En general en las expresiones anteriores el limite y las derivadas no
se pueden intercambiar (no conmutan). Sin embargo Yang y Lee demostraron que para el tipo de interacción aquı́ considerada el lı́mite
(468) exite y ambas operaciones pueden ser intercambiadas.
Teorema I: Para valores de y reales y positivos, (1/V ) ln Ξ(V, T, y) se
aproxima a un lı́mite (cuando V → ∞) que es independiente de la forma
del volument V. Además este lı́mite es una función continua monótonamente creciente de y. Para demostrarlo, primero demostraremos dos
lemas:
Lemma I: Sean V y W dos cubos de dimensión lineal L y L + (b/2),
respectivamente. Entonces para b fijo se tiene
1
(ln Ξ(W, T, y) − ln Ξ(V, T, y)) = 0
L→∞ W
lı́m
(469)
La demostración es sencilla. Pongamos el volumen V dentro de W y
escribimos Ξ(W, T, y) como la suma de contribuciones A0 , A1 , . . . correspondientes a configuraciones con cero, uno . . . átomos fuera de V.
Como la interacción es de corto alcance cada átomo interacctúa como
máximo con un número definido de otros átomos. El volumen permitido para el primer átomo fuera de V es ∆ = W − V, para el segundo
∆ − α donde α es el volumen del corazón impenetrable de cada átomo,
102
para el tercero ∆ − 2α y ası́ sucesivamente de forma que:
Am ≤ β m [∆(∆ − α) . . . (∆ − mα + α)/m!]Ξ(V, T, y)
(470)
con β una constante. Esta desigualdad que se obtiene comparando las
contribuciones a Am y a Ξ(V, T, y) de una distribución de átomos con
N átomos dentro de V y m fuera. Sumando sobre todos los Am se tiene:
Ξ(W, T, y) ≤ Ξ(V, T, y)(1 + βα)∆/α
(471)
pero ∆ ∼ L2 ( Ejercicio: Demostrarlo). Por otro lado se tiene claramente
Ξ(V, T, y) ≤ Ξ(W, T, y)
(472)
con lo que queda demostrado el Lemma I.
Lemma II: Sea Wi un cubo de dimensión lineal 2i L. y sea Ξi ≡
Ξ(Wi , T, y), entonces
1
∃ lı́m
ln Ξi = K
(473)
i→∞ Wi
Demostración: Consideremos Wj el cubo formado por 8j−i cubos Wi (j >
i) (Wi = 8i−j Wj ). El número de átomos interactuando en las fronteras
de los cubos pequeños es como máximo proporcional al área de dichas
fronteras y por lo tanto menor que 8j 2−i γ con (γ = cte). Si no tenemos
en cuenta estas interaciones, Ξj será igual a Ξi elevado a una potencia
de 8j−i , de forma que tener en cuenta las interaciones viola la anterior
identidad en una cantidad no mayor de cierto factor β elevado a 8j 2−i γ.
Ası́
ln Ξj ≤ 8j−i ln Ξi + 8j 2−i γ ln β.
(474)
Dentro de cada cubo Wi dibujemos ahora un cubo concéntrico al anterior de dimensión 2i L − (b/2) con b el rango de la interacción. Entonces
átomos dentro de diferentes Vi no interaccionan de donde se tiene
8j−i ln Ξ(Vi , T, y) ≤ ln Ξj
(475)
Entonces se tiene trivialmente que
1
1
1
ln Ξ(Vi , T, y) ≤
ln Ξj ≤
ln Ξi + 2−i γL−3 ln β
Wi
Wj
Wi
(476)
El segundo sumando del último término tiende a cero para i → ∞, y
del lema I se tiene que lı́mL→∞ Wi−1 (ln Ξi −ln Ξ(Vi , T, y)) = 0, de forma
que para j > i → ∞ se tiene
Wj−1 ln Ξj − Wi−1 ln Ξi = 0,
103
(477)
con lo que queda demostrado el Lemma II.
Demostremos ahora el Teorema I. El lemma II nos dice que dado > 0
hay una cubo suficientemente grande tal que
|K − W −1 ln Ξ(W, T, y)| < (478)
de igual forma podemos extender este resultado a cualquier volumen Ω
que mediante particiones pueda ser dividido en cubos de tamaño W, es
decir:
|K − Ω−1 ln Ξ(Ω, T, y)| < .
(479)
Consideremos ahora un volumen arbitrario V. Para V sufientemente
grande siempre podemos encontrar dos volumenes de este tipo Ω, Ω1
y Ω2 tal que Ω1 ⊂ V ⊂ Ω2 y que su diferencia sea |Ω1 /Ω2 − 1| < .
Usando que
ΞΩ 1 ≤ Ξ V ≤ Ξ Ω 2
(480)
queda demostrado que V −1 ln V también se aproxima a K. Por último
que es monótonamente creciente con y se deriva de que V −1 ln Ξ(V, T, y)
lo es, y que es continuo se deduce de que que la derivada respecto del
ln y de V −1 ln Ξ(V, T, y) que es 1/v = ρ está acotada por la densidad
de máximo empaquetamiento, luego no puede diverger.
Teorema II: Si en el plano complejo y una región R conteniendo un
segmento del eje real positivo no tiene raı́ces, entonces en esa región y
en el lı́mite V → ∞ todas las cantidades
n
1
∂
1
ln Ξ(V, T, y);
y
ln Ξ(V, T, y) n = 1, 2 . . . ∞
(481)
V
∂y
V
se aproximan a lı́mites que son funciones analı́ticas de y. Además las
operaciones y∂/∂y y lı́mV →∞ conmutan en R de forma que
∂
1
∂ 1
lı́m y
ln Ξ(V, T, y) = y
lı́m
ln Ξ(V, T, y)
(482)
V →∞
∂y V
∂y V →∞ V
que permite escribir
1
∂
=y
v
∂y
P
kT
(483)
Para demostrarlo primero demostraremos el siguiente lemma:
Lemma III: Consideremos la serie
∞
X
bl (V )z l = SV (z)
l=0
104
(484)
donde |bl (V )| ≤ A/σ l con A y σ constantes positivas. Supongamos que para
todo z real comprendido entre −σ y σ existe el lı́m SV (z) cuando V → ∞.
Entonces:
a) ∃ lı́m bl (V ) cuando V → ∞ y lo denotamos por bl (∞)
b) SV (z) se aproxima al lı́mite
∞
X
bl (∞)z l
(485)
l=0
cuando V → ∞ para todo |z| < σ. La serie (485) es convergente para
todo |z| < σ.
Demostración: (a) Trivialmente b0 (∞) existe y es igual lı́m SV (0) cuando
V → ∞. Para probar que la existencia de lı́m b1 (V ) cuando V → ∞ consideremos real tal que 0 < < σ/2 y la convergencia de b0 (V ) y SV () cuando
V → ∞. Entonces existe un volumen V0 tal que para V y W mayores que V0
uno tiene
|SV () − SW ()| < 2
(486)
2
|b0 (V ) − b0 (W )| < pero además
∞
X
A2
bl (V )l ≤
≤ 2A2 .
1 − σ −1
l=2
(487)
Lo mismo ocurre para el volumen W. Usando entonces que
b1 (V ) = SV () − b0 (V ) −
∞
X
bl (V )l
(488)
l=2
uno puede probar fácilmente
|b1 (V ) − b1 (W )| ≤ (2 + 4A)2
(489)
luego existe el lı́m b1 (V ) cuando V → ∞. Lo mismo se hace para los demás
órdenes de la serie.
P
l
(b) es trivial pues la serie ∞
l=0 bl (V )z converge uniformemente en z para
|z| < σ.
Demostremos ahora el teorema II. Consideremos primero un cı́culo C
dentro de la región R con su centro en el punto y = η en el eje real positivo.
105
Probaremos el teorema primero dentro del cı́rculo. Definimos z = y − η
entonces (467) queda:
Ξ(V, T, y) =
M Y
i=1
z
1−
zi
zi
yi
donde zi = yi − η son las raı́ces de Ξ. Expandiendo
tenemos
∞
X
1
ln Ξ =
bl (V )z l
V
l=0
con
y
M
−1 X
bl (V ) =
V l i=1
l
1
zi
1
V
(490)
ln Ξ en potencias de z
for l ≥ 1
M
1 X zi
ln
b0 (V ) =
V i=1 yi
(491)
(492)
(493)
puesto que C no contiene raı́ces, y si σ es el radio de C se tiene |zi | ≥ σ, de
donde
|bl (V )| ≤ (M/V )l−1 σ −1 l ≥ 1
(494)
que cumple las condiciones del lemma 3 y por lo tanto podemos aplicar sus
conclusiones con lo que el teorema está demostrado en C. Uno puede extender
el teorema a todo R considerando otro cı́rculo C 0 con centro dentro de C y
ası́ sucesivamente.
El teorema I y II nos dicen que la presión debe ser continua para todo y
pero que las derivadas de la presión necesitan sólo ser continuas en regiones
del eje real positivo donde las raı́ces de Ξ(V, T, y) no tocan el eje real. En
los puntos en los que las raı́ces tocan el eje real las derivadas de la presión
pueden ser discontı́nuas, entonces el sistema presenta una transición de fase
de primer orden. Si una derivada de orden superior es la primero que es
discontı́nua entonces la transición de fase es contı́nua.
Si v es discontı́nuo en la raı́z y0 entonces deberá decrecer con y en la
dirección en la que crece y. Esto se demuestra notando que
2
∂ 1
1
1
∂
y
ln Ξ = h(N − hN i)2 i > 0
(495)
= y
∂y v
∂y
V
V
Entonces 1/v siempre se incrementa y v decrece con valores crecientes de y.
106