Document
Anuncio

Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
Práctica
2
Vibración libre sin
amortiguamiento de
un sistema con un
grado de libertad
PARTICIPACION
PRESENTACIÓN
5%
10%
INVESTIGACIONES
CÁLCULOS Y DIAGRAMAS
10%
15%
NOMBRE
RESULTADOS
30%
MATRICULA
CONCLUSIONES
25%
GRUPO DE LAB
COMENTARIOS Y OBSERVACIONES
5%
PROFESOR
INSTRUCTOR
OBJETIVO
El alumno definirá, identificará y analizará un sistema de un grado de libertad en forma teórica y
experimental comparando varios sistemas masa – resorte.
FUNDAMENTOS
Una gran cantidad de sistemas mecánicos y estructurales pueden ser considerados como
sistemas de un grado de libertad. En muchos sistemas prácticos la masa está distribuida. Sin embargo
para simplificar el análisis de dichos sistemas la masa puede aproximarse a través de una masa puntual,
convirtiendo un problema continuo en uno discreto más fácil de analizar.
Vibración
Cualquier movimiento que se repite a si mismo en intervalos de tiempo es considerado oscilación
o vibración. La teoría de vibraciones estudia este tipo de movimientos y las fuerzas asociadas con los
mismos. Los sistemas vibratorios tienen, en general, un medio que almacena energía potencial (resorte o
elastómero), un medio que almacena energía cinética (masa o inercia) y un medio a través del cual se
disipa energía en forma gradual (amortiguador).
La vibración de un sistema implica la transferencia de su energía potencial a energía cinética y la
de su energía cinética a energía potencial alternadamente. Si el sistema está amortiguado, la energía se
irá disipando en cada ciclo de vibración.
Grados de libertad
Es el mínimo número de coordenadas independientes necesarias para determinar completamente
las posiciones de todas las partes de un sistema en cualquier instante.
Clasificación de las vibraciones
A. Vibración libre
Si un sistema que es perturbado inicialmente se deja vibrando por si mismo se dice que está en
vibración libre. No existe una fuerza externa actuando en el sistema. La oscilación de un péndulo simple
es un ejemplo de vibración libre.
1
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
B. Vibración forzada
Si un sistema se sujeta a una fuerza externa, la vibración resultante se conoce como vibración
forzada. Si la frecuencia de la fuerza externa coincide con una de las frecuencias naturales del sistema,
entonces éste entrará en resonancia.
C. Vibración no amortiguada
Si durante un movimiento oscilatorio no se pierde energía en fricción o cualquier otro tipo de
resistencia, la vibración se conoce como vibración no amortiguada.
D. Vibración amortiguada
Si existe pérdida de energía durante un movimiento oscilatorio, la vibración presente se
denomina vibración amortiguada. En muchos sistemas físicos, la cantidad de amortiguamiento es tan
pequeña que puede despreciarse para fines prácticos. Sin embargo, el considerar el amortiguamiento es
sumamente importante cuando se analizan sistemas de vibración cercanos a resonancia.
E. Vibración lineal
Si todos los componentes esenciales de un sistema en vibración (resorte, masa y amortiguador)
se comportan dentro de su rango lineal, la vibración resultante se conoce como vibración lineal. Las
ecuaciones diferenciales que gobiernan el comportamiento del sistema son lineales y en consecuencia el
principio de superposición puede ser empleado, además existen fundamentos matemáticos para su
análisis completamente desarrollado.
F. Vibración no lineal
Si uno de los componentes esenciales de un sistema en vibración se comporta de manera no
lineal, la vibración resultante se conoce como vibración no lineal. Las ecuaciones diferenciales que
gobiernan el comportamiento del sistema son no lineales y el principio de superposición no es válido y las
técnicas para su análisis son más complejas y funcionan a base de aproximaciones.
Ecuación de movimiento: Segunda ley de Newton (sistema masa – resorte)
Este sistema es básico para el estudio de las vibraciones mecánicas. En este sistema el resorte
almacena energía potencial y la masa energía cinética. Existen esencialmente dos posiciones básicas
para este sistema: horizontal y vertical, sin embargo la ecuación diferencial que gobierna el movimiento
de este sistema en ambas configuraciones es exactamente la misma. Esto significa que el peso no se
verá reflejado en la ecuación diferencial.
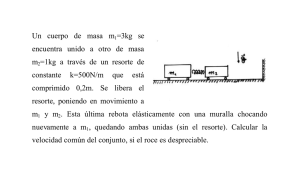
A. Posición horizontal
Considere el sistema de libertad mostrado en la figura 1. La masa está soportada en unos
rodillos con fricción nula y puede trasladarse en la dirección del eje x (horizontal). La fuerza en el resorte
es kx y, de acuerdo con la segunda ley de Newton, la ecuación de movimiento se obtiene a partir de la
ecuación
∑ F = ma
(1)
m&x& + kx = 0
(2)
por lo tanto,
donde
&x& =
d2
dt 2
2
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
La Ec. (2) puede escribirse en su forma estándar como
&x& + ωn 2 x = 0
donde
ωn 2 =
(3)
k
m
(a)
(4)
(b)
Fig. 1.-(a) Sistema masa – resorte de un grado de libertad en posición horizontal. (b)
Diagrama de cuerpo libre de dicho sistema
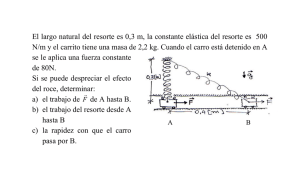
B. Posición vertical
Una masa se suspende de un resorte que se encuentra montado en un soporte rígido en su
parte superior. Inicialmente la masa se encuentra en una posición llamada posición de equilibrio (fig. 2a)
en donde la fuerza resultante en el resorte hacia arriba es exactamente igual a la fuerza gravitacional
que la masa ejerce. En esta posición la longitud del resorte es l0+δst, donde δst es la deformación estática
(elongación del resorte debida al peso w de la masa m). De esta manera de la condición de equilibrio se
obtiene
w = mg = kδ st
(5)
si la masa es desplazada una distancia x(+) con respecto a su posición de equilibrio estático, la fuerza en
el resorte ahora estará dada por –k(x+δst), como puede apreciarse en la fig. 2c. Aplicando la segunda ley
de Newton (Ec. 1) para la masa se tiene
m&x& = −k (x + δ st ) + w
(6)
y sustituyendo la Ec. (5) en la Ec. (6) se tiene que
m&x& + kx = 0
que es igual a la Ec. (2), la cual se dedujo para un sistema masa – resorte en configuración horizontal.
3
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
Fig. 2.- Sistema masa – resorte en configuración vertical. (a) Diagrama de cuerpo libre
mostrando la posición de equilibrio estático. (b) Fuerza ejercida por el resorte. (c)
Fuerza ejercida sobre el resorte por la masa durante el movimiento. (d) Energía
almacenada en el resorte.
Ecuación de movimiento: Conservación de la energía (sistema masa – resorte)
Para aplicar este principio es necesario notar que el sistema de la fig. 2 es conservativo debido a
que no hay disipación de energía a través de algún amortiguador. Durante la vibración, la energía del
sistema es parcialmente cinética (T) y parcialmente potencial (U). El principio de conservación de la
energía establece que
T + U = cte
(7)
o bien
d
(T + U ) = 0
dt
(8)
Las energías cinética y potencial están dadas por
T =
1 2
mx&
2
(9a)
U = Ue + U g
con
Ue =
1 2
kx
2
U g = mgx
(9b)
4
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
Sustituyendo las Ecs. (9b) en la Ec.(8) se obtiene nuevamente la Ec.(2)
m&x& + kx = 0
La Ec. (2) es una ecuación diferencial ordinaria, lineal y de segundo orden. La solución general
puede expresarse como
x(t ) = C1eiωnt + C2e −iωnt
(10)
donde C1 y C2 son constantes que se definen a partir de las condiciones iniciales del sistema oscilatorio.
Utilizando la identidad
e
± iαt
= cos αt ± i sin αt
(11)
la Ec. (10) puede escribirse como
x(t ) = A1 cos ωnt + A2 sin ωnt
(12)
donde A1 y A2 son constantes que se definen a partir de las condiciones iniciales del sistema oscilatorio.
Si los valores de desplazamiento x(t ) y de velocidad x& (t ) se especifican como x0 y x&0 en t=0, de la Ec.
(12) se obtiene lo siguiente
x(0) = A1 = x0
x& (0) = ωn A2 = x&0
(13)
Entonces la solución mostrada en la Ec. (12) es
⎛ x& ⎞
x(t ) = x0 cos ω n t + ⎜⎜ 0 ⎟⎟ sin ω nt
⎝ ωn ⎠
(14)
MATERIAL Y EQUIPO A UTILIZAR
•
•
•
•
Sistema masa – resorte.
Flexómetro.
Calibrador Vernier.
Cronómetro.
PROCEDIMIENTO
1. Obtener el valor de las constantes de los resortes. Para ello se pueden utilizar dos métodos:
a) Poner a vibrar libremente el resorte con una masa, obtener su frecuencia natural y
posteriormente despejar k de la ecuación
ωn =
k
m
(15)
5
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
b) Fijar un extremo del resorte y colocarle una serie de masas conocidas en el extremo
libre. Empezar con una masa de manera que la elongación sea mínima y después incrementar la
masa (∆m) e ir midiendo las elongaciones (∆l) en el resorte. No olvide que
k=
gΔm
Δl
(16)
REPORTE
1. Encontrar la frecuencia natural del sistema para cada una de sus tres posiciones, poniéndolo a
oscilar libremente y midiendo el tiempo que tarda en completar N oscilaciones.
2. Determine la frecuencia natural de forma analítica para cada una de las tres posiciones que se
muestran en la figura 3.
Fig. 3.- Configuraciones de sistema masa – resorte para analizar en el laboratorio.
Para simplificar los cálculos en el péndulo primero se hará que la masa total del sistema se
concentre en un solo punto, tal y como se muestra en la figura 4. En dicha figura se representan las
distancias entre los centros de masa de la barra y del cilindro al centro donde quedarían proyectados a1 y
a2, y lg que sería la longitud del centro de masa del sistema al origen. Partiendo de lo anterior se tiene lo
siguiente
Mlg = ∑ M i li
de donde se obtiene que
m1l1 + m2l2 = (m1 + m2 )l
lg =
m1l1 + m2 l 2
m1 + m2
(17)
(18)
Fig.4.- Representación del péndulo.
6
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
Es necesario también proyectar el momento de inercia de las dos masas a la distancia lg
utilizando el teorema de ejes paralelos. Para la barra se tiene que
I g1 =
(
m
3d o2 − 3d i2 + 4l 2
48
)
(19)
para el cilindro se tiene
I g2 =
por lo tanto
(
m
3d 2 + 4l 2
48
)
(20)
I g −barra = I g1 + m1 a12
(21)
I g −cilindro = I g 2 + m 2 a22
finalmente
I g = I g −barra + I g −cilindro
(22)
I o = I g + Ml
2
g
Partiendo de la agrupación de ambas masas en un solo punto se realiza una sumatoria de
momentos para deducir las ecuaciones de movimiento del sistema de un grado de libertad en sus tres
diferentes configuraciones.
Caso (a)
A partir de la figura 5 es se obtiene lo siguiente
FR = kδ
δ = l sin θ
sin θ = θ
(23)
La sumatoria de momentos en el punto O se muestra a continuación
Se asume que el movimiento
es en el sentido de las
manecillas del reloj
∑M
..
o
= −Io θ
..
2klo2θ − mgl g = − I o θ
(24)
..
I o θ + 2klo2θ − mgl g = 0
de tal manera que la frecuencia natural de oscilación del sistema mostrado en la figura 3(a) es
2klo2
ωn =
Io
(25)
7
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
Fig. 5.- Diagrama de cuerpo libre de la primera configuración del péndulo estudiado.
Caso (b)
La deducción de la ecuación de movimiento para este caso es muy similar a la anterior. La
sumatoria de momentos en el punto O se muestra a continuación (se han hecho las mismas suposiciones
que en el caso anterior).
..
2klo2θ − mgl gθ = − I o θ
⎛ 2klo2 − mgl g
θ + ⎜⎜
Io
⎝
..
(26)
⎞
⎟θ = 0
⎟
⎠
por lo tanto la frecuencia natural de oscilación de este sistema es
ωn =
2klo2 − mgl g
(27)
Io
Caso (c)
La sumatoria de momentos en el punto O se muestra a continuación
..
2klo2θ + mgl gθ = − I o θ
⎛ 2klo2 + mgl g
θ + ⎜⎜
Io
⎝
..
⎞
⎟θ = 0
⎟
⎠
(28)
por lo tanto la frecuencia natural de oscilación de este sistema es
ωn =
2klo2 + mgl g
Io
(29)
3. Realice una modelación del sistema en Working Model y en MATLAB de las tres
configuraciones analizadas. Grafique posición, velocidad y aceleración. Además calcule por medio de la
simulación el valor de la frecuencia natural ωn.
8
Laboratorio de Vibraciones Mecánicas
Departamento de Ingeniería Mecánica
4. Obtenga el error relativo entre el método experimental, analítico y computacional. Para
reportar estos resultados llene la siguiente tabla. (No olvide incluir los cálculos realizados para obtener
dichos resultados).
Sistema
Analítico
Experimental
Working
Model
MATLAB
[rad/s]
Analítico
vs. Exp.
Analítico
vs.
W.M.
Analítico
vs.
MATLAB
% Error
A
B
C
Programa de MATLAB
drive.m
smra.m
rango=[0 1];
val_in=[0; 0];
[t,y]=ode45('smra',rango,val_in);
x=y(:,1);
v=y(:,2);
plot(t,x,t,v,'--')
xlabel('Tiempo, [s]')
ylabel('Des., [m], Vel., [m/s]')
title('Sistema Masa - Resorte')
grid
function yprime=smra(t,y)
f=2;
g=9.81;
Lo=0.46;
Lg=0.56;
m=1.6;
b=0.0;
k=436;
Io=0.4631;
yprime=[y(2)
(f+m*g*Lg)/Io-b*y(2)/Io-(2*k*Lo^2*y(1))/Io];
INVESTIGACIÓN
1. Funcionamiento de un péndulo de reloj.
2. Tipos de péndulo y su funcionamiento.
REFERENCIAS
[1] Rao, Singiresu S. “Mechanical Vibrations”, Fourth Edition, Pearson. USA 2003.
[2] Steidel, Robert F. “An introduction to mechanical vibrations”, Third Edition, John Wiley, USA 1989.
[3] Thomson, William T. “Theory of vibrations: applications”. Second Edition, Prentice Hall, USA 1982.
[4] Kelly, Graham S. “Fundamentals of mechanical vibrations”. Second Edition. McGraw Hill. USA 2000.
[5] Stile, Hidgon. “Ingeniería Mecánica, tomo II: Dinámica Vectorial”. Prentice Hall, 1982.
9