Sobre la matemática del Problema de Kepler
Anuncio

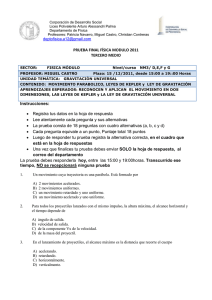
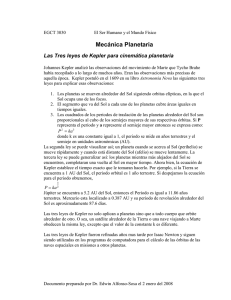
Sobre la matemática del Problema de Kepler Carlos S. Chinea Sobre la matemática del Problema de Kepler Carlos Sánchez Chinea Introducción Johannes Kepler (Weil der Stadt, Alemania, 27 de diciembre de 1571 - Ratisbona, Alemania, 15 de noviembre de 1630), publicó las tres leyes que describen el movimiento de los planetas en orbitas cerradas alrededor del Sol, las dos primeras en el año 1609 (en su obra Astronomia Nova), y la tercera ya en el año 1619, en su Harmonices mundi (La armonía de los mundos), cuando aún no se conocía la ley de gravitación de Newton (Isaac Newton nacería el 25 de diciembre del año 1642, doce años después de la muerte de Kepler). El descubrimiento de Kepler fue, pues, experimental, basándose en los datos sobre el movimiento planetario que se conocían hasta el momento, en particular los datos acumulados por Tycho Brahe, a los cuales pudo acceder a partir de 1602. Con el desarrollo de la mecánica newtoniana y el conocimiento de que la ley de atracción de las masas es una fuerza central de potencial inverso a la distancia, las tres leyes pudieron ser deducidas matemáticamente. Esta deducción teórica solamente pudo hacerse, pues, a partir de la obra de Newton. En el presente estudio exponemos una forma de obtener matemáticamente las tres leyes desde la consideración de un campo central newtoniano. Obtendremos las ecuaciones del movimiento del sistema constituido por las dos masas Astronomia Nova, 1609 que se encuentran en mutua atracción y reduciremos el problema al movimiento de un solo cuerpo inmerso en el campo de atracción de uno de ellos supuesta fija su posición. 1 Sobre la matemática del Problema de Kepler Carlos S. Chinea Añadimos al final un pequeño apéndice que tiene por objeto definir de forma elemental el concepto de curva cónica e indicar algunas propiedades sencillas de la elipse a fin de que el lector pueda seguir fácilmente la exposición. Las tres leyes Primera Ley: 1. Todos los planetas se deslazan alrededor del Sol siguiendo una trayectoria elíptica, una elipse, en uno de cuyos focos se encuentra emplazado el Sol. Kepler obtuvo esta ley de forma empírica, mediante observación de los movimientos aparentes de los planetas. Es válida, pues para objetos de gran tamaño orbitando alrededor del Sol siguiendo órbitas cerradas: planetas, asteroides, etc.., pero si se tiene en cuenta el movimiento general de los cuerpos celestes habría que enunciar esta primera ley kepleriana de la siguiente manera: 1. Bajo la fuerza de atracción gravitacional de un objeto astronómico el movimiento de otro objeto a su alrededor sigue una trayectoria cónica (círculo, elipse, parábola, hipérbola). Para probar mediante la mecánica de Newton que se verifica esta ley, hemos de probar que la trayectoria de un objeto que orbita alrededor de una masa mayor está contenida en un plano, por una parte, y por otra, hemos de probar que tal trayectoria plana es necesariamente una cónica (elipse, circunferencia, parábola o hipérbola). Segunda Ley: 2. El radio vector de origen en el Sol y extremo en el punto de posición de cada planeta recorre áreas iguales en tiempos iguales. Esto indicará que los planetas más cercanos al sol se desplazan más rápidamente, o sea, tardan menos tiempo en dar una vuelta completa en la elipse. La prueba sería, simplemente, el probar que el área recorrida por el radio vector en cada unidad de tiempo es constante Tercera Ley: 3. Los cuadrados de los periodos siderales de revolución de los planetas alrededor del Sol son proporcionales a los cubos de los semiejes mayores de sus órbitas elípticas. a3 = cons tan te T2 La prueba, obviamente, consistiría en obtener tal relación de proporcionalidad. 2 Sobre la matemática del Problema de Kepler Carlos S. Chinea El problema de los dos cuerpos Supongamos dos masas, m1 y m2, que interaccionan por mutua atracción a una distancia r, con potencial V (r ) . Se verifica, por principio de acción y reacción, que r r f12 = − f 21 r r f12 = −∇V (r ) Llamando C al centro de inercia de ambas masas, podemos escribir, desde la figura, las relaciones vectoriales: r r r r1 = rc + rc1 r r r r2 = rc + rc 2 r r r r&1 = r&c + r&c1 r r r r&2 = r&c + r&c 2 Asimismo: r r r r r r r = r2 − r1 r& = r&2 − r&1 Por ser C centro de inercia: r r m1.rc1 + m2 .rc2 = 0 r r r = rc2 − rc1 De lo cual se deduce que: m2 r r m1 r r rc2 = r m1 + m2 m1 + m2 r m2 r& r m1 r& vc1 = − r vc2 = r m1 + m2 m1 + m2 r rc1 = − Y la energía cinética del sistema es: r 1 r 1 r r 1 r 1 1 m22 r& 2 + Τ = (m1 + m2 ).r&c2 + m1.r&c12 + m1.r&c22 = (m1 + m2 ).r&c2 + m1. 2 2 2 2 2 2 (m1 + m2 ) r r 1 m1.m2 r& 2 1 1 m12 r& 2 = (m1 + m2 ).r&c2 + r + m1. 2 2 (m1 + m2 ) 2 2 m1 + m2 Y si llamamos m a la masa reducida del sistema: m .m m= 1 2 m1 + m2 queda: r r 1 Τ = (m1 + m2 ).r&c2 + m.r& 2 2 Con lo que obtenemos la expresión de la función de Lagrange: r r 1 L = Τ − V (r ) = (m1 + m2 ).r&c2 + m.r& 2 − V (r ) 2 [1] Puesto que se han de verificar las ecuaciones de Lagrange para la variable decir rc, es d ∂L ∂L r − r =0 dt ∂r&c ∂rc se tiene entonces que, al ser rc una variable ignorada en la expresión, será: 3 Sobre la matemática del Problema de Kepler Carlos S. Chinea r r d ∂L d r = (m1 + m2 )r&c = (m1 + m 2 ).&r&c r dt ∂r&c dt → (m1 + m 2 ).&r&c = 0 ∂L r =0 ∂rc r de lo que se deduce que &r&c = 0 , es decir, el centro de inercia C está en reposo o con movimiento uniforme, lo que nos indica que las fuerzas centrales no afectan a su movimiento, por lo que podemos usarlo como origen de referencia (haciendo r rc = 0 ). La lagrangiana [1] quedaría entonces en la forma L= 1 r& 2 m.r − V (r ) 2 y la solución del problema es equivalente formalmente al movimiento de una partícula de masa m desplazándose en el campo central V(r) origen de las fuerzas dirigidas hacia la masa fija m1: L= 1 m1.m2 r& 2 r − V (r ) 2 m1 + m2 r r r r r r r& = r&.ur + rθ&.uθ , siendo ur , uθ vectores unitarios. Se tiene, entonces: r& 2 = r& 2 + rθ& 2 y la lagrangiana queda en función de las coordenadas r , θ así: 1 m1.m2 2 1 m1.m2 2 & 2 L= r& + r θ − V (r ) 2 m1 + m2 2 m1 + m2 El movimiento describe una órbita plana: Podemos obtener de inmediato las ecuaciones del movimiento: Consideremos la expresión de la lagrangiana con la masa reducida, y apliquemos las ecuaciones de Lagrange 1 1 m.r& 2 + mr 2θ& 2 − V (r ) 2 2 ∂L & 2 ∂V (r ) ∂r = mrθ − ∂r ∂V (r ) &r& − mrθ& 2 + → =0 m d ∂L ∂L ∂L ∂ r 0 − = = mr& dt ∂r& ∂r → ∂r& d ∂L ∂L ∂L =0 =0 &− d ∂θ dt ∂θ ∂θ → (mr 2θ&) − 0 = 0 ∂L dt = mr 2θ& ∂r L= Ecuaciones del movimiento: ∂V (r ) =0 m&r& − mrθ& 2 + ∂r mr 2θ& = cons tan te r La segunda ecuación del movimiento nos indica que el momento angular La , por definición perpendicular a la trayectoria, es constante: 4 Sobre la matemática del Problema de Kepler Carlos S. Chinea r r r r r r r r r r r La = r ∧ p = r.u r ∧ m(r&.u r + rθ&.uθ ) = m.r.r&.u r ∧ u r + mr 2θ&(u r ∧ uθ ) = 0 + mr 2θ&.k = cte r La = cte [2] lo que nos dice que la trayectoria está contenida en un plano. Una vez visto que la trayectoria del movimiento es una curva plana, se trata ahora de establecer el tipo de curva. Se trata de probar que, efectivamente, es una cónica. Para ello hemos de integrar las ecuaciones del movimiento. Por simplicidad utilizaremos las integrales primeras E y La: 1 m 2 .r 4θ& 2 1 r& 2 1 1 1 + V (r ) → m.r + V (r ) = m.r& 2 + m.r 2θ& 2 + V (r ) = m.r& 2 + 2 2 m.r 2 2 2 2 L2a 1 → E = m.r& 2 + + V (r ) 2 2m.r 2 L2a 1 r Si llamamos Vc = + V (r ) , será E = m.r& 2 + Vc (r ) , de donde despejamos r& : 2 2 2.m.r dr 2 dr (E − Vc (r ) ) , y de aquí: t = ∫ = dt m 2 (E − Vc (r ) ) m E = Τ + V (r ) = 2 También de La = m.r θ& despejamos θ& : L dθ L = a 2 , de donde se obtiene θ = ∫ a 2 dt m.r dt m.r Se han obtenido así las relaciones t = t ( r ) y ambas obtenemos la relación θ =∫ θ = θ (t ) . Eliminando el tiempo entre θ = θ (r ) que nos da la órbita buscada: La dt = ∫ m.r 2 La 2 m.r dr = ∫ 2 (E − Vc (r ) ) m L − d a r 2m(E − Vc (r ) ) [3] 5 Sobre la matemática del Problema de Kepler Carlos S. Chinea Para poder integrar necesitamos conocer la forma del potencial, esto es, la ley de la gravitación newtoniana. La ley de gravitación de Newton establece como potencial V (r ) = − por simplicidad, llamando k = G.m1 .m 2 , sería V ( r ) = − que Vc = Gm1 m2 , o bien, r k , y resulta, en definitiva r L2a k − 2 r 2.m.r Primera Ley de Kepler. Las trayectorias posibles han de ser curvas cónicas Vamos a resolver la integral [3] a fin de obtener la ecuación de la trayectoria para el potencial newtoniano: θ =∫ L − d a r = 2m(E − Vc (r ) ) ∫ L − d a r L2a k 2m E + − r 2mr 2 preparamos el radicando que figura en denominador a fin de resolver la integral: L2 k 2mk L2a − 2 2m E + − a 2 = 2mE + r 2mr r r 2 2 m .k le sumamos y restamos la expresión , con lo cual L2a k L2 m 2 .k 2 m 2 .k 2 2mk L2a m 2 .k 2 L mk 2m E + − a 2 = 2mE + 2 − 2 + − 2 = 2mE + 2 − a − r 2mr La La r r La r L a L L − d a − d a r r θ =∫ =∫ 2 L2 k m 2 k 2 La mk 2m E + − a 2 2mE + 2 − − r 2mr La La r Si hacemos el cambio de variables z = q = 2mE + 2 La mk − , y llamamos, por simplificar, r La m 2 .k 2 , la integral queda así: L2a θ =∫ − dz q−z 2 = 1 ∫ q − dz z2 1− q =∫ z − d q = arccos z + θ q 0 2 z 1− q De lo cual se tiene que 6 Sobre la matemática del Problema de Kepler z q Carlos S. Chinea = cos(θ − θ 0 ) → z = q . cos(θ − θ 0 ) Deshaciendo los cambios: La mk m2k 2 − = 2mE + 2 . cos(θ − θ 0 ) r La La o bien: 2 EL2a 1 mk mk = 2 + 2 1+ cos(θ − θ 0 ) r La La mk 2 Es decir, se obtiene una ecuación de la forma: 1 1 ε = + cos(θ − θ 0 ) r p p que corresponde a una cónica de excentricidad ε = 1+ 2 EL2a (ver la definición de mk 2 cónica y la ecuación polar en el primer apartado del apéndice, expresión [A0]). El valor de la excentricidad depende simplemente de la energía total las otras magnitudes son constantes. Veamos los valores posibles: a) Si E > 0 , entonces hipérbola. 1+ E, puesto que 2 EL2a > 1 → ε > 1 , es decir, se trata de una mk 2 2 EL2a = 1 → ε = 1 , se trata ahora de una b) Si E = 0 , entonces 1 + mk 2 parábola. c) Si E < 0 , entonces 0 ≤ 1+ 2 EL2a 2 EL2a < 1 o bien 1 + < 0 , por tanto se mk 2 mk 2 tienen las dos alternativas: 2 EL2a < 1 → 0 ≤ ε < 1 , que corresponde a una elipse, en mk 2 donde el caso extremo ε = 0 es el de la circunferencia. 2 EL2a c2) Si 1 + < 0 → ε ∉ R y no hay órbita. mk 2 c1) Si 0 ≤ 1+ En definitiva, si los planetas se desplazan alrededor del Sol en órbitas cerradas, éstas han de ser necesariamente elípticas (consideramos la circunferencia como un caso particular de elipse), tal como afirmaba la primera ley de Kepler, cumpliéndose que E = Τ + V < 0 , es decir que T < V . Los planetas se desplazan alrededor del Sol siguiendo órbitas elípticas 7 Sobre la matemática del Problema de Kepler Carlos S. Chinea Segunda Ley de Kepler. Áreas barridas en tiempos iguales son iguales Consideremos un planeta en orbita elíptica alrededor del Sol, que ocupa uno de los r dos focos. Sea dr la variación infinitesimal del radio vector de posición del planeta en su movimiento orbital, con respecto al Sol. El área infinitesimal barrida es la r r mitad del área del paralelogramo que definen los vectores r y dr : dS = r r r 1 r 1 r 1 r r 1 dS 1 r dr dr = r∧ = = r ∧ dr → r ∧m r∧p = La dt 2 dt dt 2 2m 2m 2m y siendo constante el momento angular La en el campo central ([2]), se tiene que la velocidad areolar es constante: dS dθ 1 2 dθ dS 1 1 La = mr 2 = = r = cte → = cte → S = λt + S0 dt 2m dt 2 dt dt 2m S = λt + S 0 Podemos encontrar la expresión de la constante λ en función de los parámetros de la órbita, considerando el periodo T de traslación del planeta y los ejes a y b de la elipse que describe, ya que el área barrida en un periodo T es el área total definida por dicha elipse y que calculamos en el apéndice ([A5]): dS πab = dt T Siendo (ver apéndice, [A1]) p a= [4] = a(1 − ε 2 ) , se tiene: p = 1− ε 2 L a2 k mk =− 2 2E L − 2E a mk 2 [5] Asimismo, de [A2] y [A3]: 8 Sobre la matemática del Problema de Kepler b = + a 2 − c 2 = +a 1 − ε 2 = a p = a Carlos S. Chinea pa = − k L2a L2a La . = = 2 E mk 2m E 2m E [6] Será: dS = dt π (− k 2 E ).( La 2m E ) T = − kπLa 2 ET 2m E Tercera ley de Kepler. Los cuadrados de los periodos siderales de revolución de los planetas alrededor del Sol son proporcionales a los cubos de los semiejes mayores de sus órbitas elípticas. L πa.b dS πa.b , sustituimos el valor del semieje = → a = 2m dt T T La menor por el valor [6] b = , y eliminamos también la energía total mediante 2m E En la expresión [4]: k a fin de que las únicas variables que aparezcan sean el valor del semieje a mayor, a, y el periodo T de la órbita: E=− L2a π 2 a 2b 2 = = T2 4m 2 Simplificando: π 2a 2 L2a 2m E T2 = π 2 a 2 L2a 2m E T 2 = π 2 a 2 L2a 2m k 2 T 2a = 2π 2 a 3 L2a 2mkT 2 a3 1 = π 2 2 , por lo que, en definitiva, resulta: 4m kT a3 k = = cte 2 T 4π 2 m Un ejemplo de cálculo usando la tercera ley de Kepler En el caso de la Tierra orbitando alrededor del Sol, podemos encontrar la longitud 30 del semieje mayor de la elipse conociendo las masas del Sol (1,9891x10 Kgs) y de 24 la Tierra (5,9736x10 Kgs) junto con el periodo orbital (365,2564 días terrestres): a3 k G.m1.m2 G (m1 + m2 ) G (m1 + m2 ) 2 .T = = = → a3 = 2 2 2 4π m 4π 2 m1.m2 4π 4π 2 T m1 + m2 9 Sobre la matemática del Problema de Kepler Carlos S. Chinea por tanto, el semieje mayor de la elipse que describe el movimiento de la Tierra alrededor del Sol puede calcularse como a=3 G (m1 + m2 ) 2 .T 4π 2 G = 6,67.10 −11 Nw.m 2 .Kg −2 m1 = 1,9891.1030 Kgs (masa del Sol) m2 = 5,9736.1024 Kgs (masa de la Tierra) 1 año = 365,2564 dias = 31,55815296.10 6 s π = 3,1416 m1 + m2 = 1,9891.10 30 + 5,97363.10 24 Kg = 1,98910597363.10 30 Kg G (m1 + m2 ) = 6,67.10 −11 x1,98910597363.10 30 = 13,2673368441121 .1019 Nw.m 2 .Kg −1 = = 13,2673368441121.1019 m 3 .s − 2 G (m1 + m2 ) 13,2673368441121 19 = .10 = 0,3360639964.1019 m 3 s − 2 39,47860224 4π 2 G (m1 + m2 ) 2 .T = 0,3360639964.1019 x995,917018246.1012 = 3346,91853234776.1030 m 3 2 4π G (m1 + m2 ) 2 3 a=3 .T = 3346,91853234776 .1010 m = 14,9582819.1010 m = 14,9582819.10 7 km = 4π 2 = 149582819 kms Bibliografía: LANDAU, L.D.; LIFSHITZ, E.M., “Curso de Física Teórica”, vol I (Mecánica) y Vol II (Teoría Clásica de los Campos). Editorial Reverté, Barcelona. BAKULIN, P.I.; KONONOVICH, E.V.; MOROZ, V.I., “Curso de Astronomía General”, Editorial Mir-Rubiños, Moscú-Madrid. WIKIPEDIA, http://es.wikipedia.org/wiki/Astronomia_nova, de donde se ha tomado la imagen de la portada del libro de Kepler Astronomia Nova. 10 Sobre la matemática del Problema de Kepler Carlos S. Chinea Apéndice Definición elemental de cónica: Una cónica es el lugar geométrico de los puntos del plano cuya relación de distancias a un punto y una recta fijos es constante y se denomina excentricidad de la cónica. El punto y la recta fijos se denominan, respectivamente, foco y directriz de la cónica, y el cociente de dividir la distancia al foco por la distancia a la directriz nos da, por consiguiente, el valor de la excentricidad. Llamando D a la distancia desde el foco a la directriz, se tiene: D = r cos θ + d → d = D − r cos θ ε= r r = d D − r cos θ εD = r (1 + ε cos θ ) → ε 1 1 = + cos θ r εD εD llamando p = εD , queda la expresión siguiente para la ecuación de la cónica en coordenadas polares con origen en el foco: 1 1 ε = + cos θ r p p [A0] Se definen, mediante el valor de la excentricidad, los diferentes tipos de cónicas: -Hipérbola, si ε > 1 -Parábola, si ε = 1 -Elipse, si 0 ≤ ε < 1 (la circunferencia puede considerarse una elipse de excentricidad nula) 11 Sobre la matemática del Problema de Kepler Carlos S. Chinea De los tres tipos de cónicas, la única cerrada es la elipse, que corresponde al caso de excentricidad menor estrictamente que la unidad. Veamos algunas propiedades. Algunas propiedades de la elipse: θ = o, El radio vector mínimo, rmin corresponde a y el radio vector máximo, rmax z corresponde a θ = π : 1 rmin = 1 ε 1+ ε p + cos 0 = → rmin = 1+ ε p p p 2a = rmin + rmax = 1 rmax p p 2p p + = →a= 2 1+ ε 1− ε 1− ε 1− ε 2 = p 1 ε 1− ε → rmax = + cos π = p p p 1− ε [A1] Si llamamos c a la distancia entre el foco de referencia y el centro de la elipse, se tiene que c = a − rmin = a − c p a(1 − ε 2 ) =a− = a − a.(1 − ε ) = εa , o sea, ε = a 1+ ε 1+ ε [A2] rmedio el radio vector del punto donde el semieje menor corta a la elipse, se tiene que ε = rmedio d = rmedio D + c → rmedio = ε ( D + c ) = εD + εc = p + ε (εa ) = Si es 12 Sobre la matemática del Problema de Kepler Carlos S. Chinea = a(1 − ε 2 ) + ε 2 a 2 = a . Luego, es rmedio = a Por tanto, se verifica que b 2 = a 2 − c 2 = a 2 (1 − ε 2 ) → 1 − ε 2 = b 2 a 2 [A3] La ecuación reducida: Podemos obtener la ecuación de la elipse en coordenadas rectangulares con origen en el centro (0,0) de la elipse. Bastará hacer el cambio, desde la ecuación en coordenadas polares con origen en un foco F, de la forma x − c = r. cos θ 2 2 r = ( x − c ) + y que, sustituimos en la ecuación polar: 1 1 ε = + cos θ r p p r= p → p = r + ε .r. cos θ → p = ( x − c) 2 + y 2 + ε ( x − c) → 1 + ε . cos θ → p − ε ( x − c) = ( x − c) 2 + y 2 Elevamos al cuadrado: p 2 − 2ε ( x − c) p + ε 2 ( x − c) 2 = ( x − c) 2 + y 2 o bien p 2 − 2ε ( x − c) p = (1 − ε 2 )( x − c) 2 + y 2 sustituimos, de [A1], p = a (1 − ε 2 ) : a 2 (1 − ε 2 ) 2 − 2ε ( x − c)a (1 − ε 2 ) = (1 − ε 2 )( x − c) 2 + y 2 sustituimos también [A3]: a2 por [A2] b4 b2 b2 − − = 2 ( x − c) 2 + y 2 x c a 2 ε ( ). . 4 2 a a a ε = c / a , por lo que b4 c b2 b2 a 2 4 − 2 ( x − c).a. 2 = 2 ( x − c) 2 + y 2 a a a a simplificando: b2 1 1 1 − 2c( x − c) 2 = 2 ( x − c) 2 + 2 y 2 2 a a a b 2 2 2 2 b 2cx − 2c x − 2cx + c y2 − = + a2 a2 a2 b2 b 2 2cx − 2c 2 2cx − c 2 x 2 y 2 − + = 2+ 2 a2 a2 a2 a b 13 Sobre la matemática del Problema de Kepler Carlos S. Chinea b2 + c2 x2 y 2 = 2+ 2 a2 a b 2 2 2 a x y = 2+ 2 2 a a b Ecuación reducida de la elipse: x2 y2 + =1 a2 b2 [A4] Superficie total limitada por la elipse: y = +b. 1 − x2 a2 La superficie total puede calcularse como la integral definida a a 0 0 S = 4∫ y.dx =4b ∫ 1 − Hacemos el cambio de variables x2 .dx a2 x a = senz dx = a. cos z.dz Con lo queda: π π π 2 2 π 0 0 2 1 + cos 2 z dz = 2ab ∫ (1 + cos 2 z ).dz = 2 0 0 2 S = 4b ∫ 1 − sen 2 z .a. cos z.dz = 4ab ∫ cos 2 z.dz = 4ab ∫ π π 2 2 0 0 π = 2ab ∫ dz + 2ab ∫ cos 2 z.dz =2ab.z 02 + 2ab sen2 z 2 π 2 0 π sen2 sen2.0 π 2 = 2ab + 2ab − = 2 2 2 = πab + 0 = πab Superficie: S = πab [A5] 14