Anexo: Cierre del Curso
Anuncio

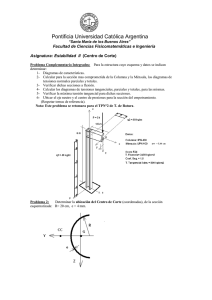
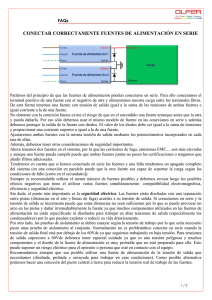
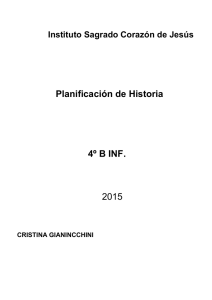
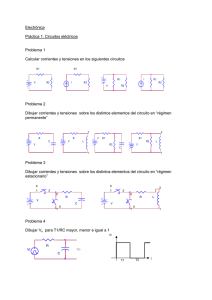
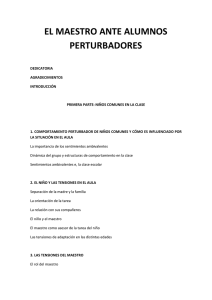
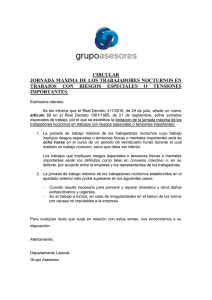
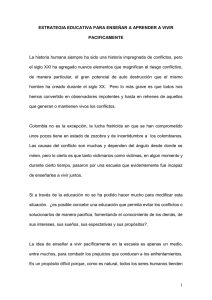
Anexo: Cierre del Curso Introducción La Mecánica de las Estructuras es una disciplina inmersa en la Teoría de la Elasticidad la que a su vez es una parte de la Mecánica de Sólidos Deformables. Esta última está gobernada por ecuaciones diferenciales a derivadas parciales cuya solución exacta es imposible para geometrías y/o condiciones de contorno de cierta generalidad. Una primera aproximación a la Mecánica de los Sólidos es limitar las características de los modelos del material constitutivo y suponer que el material es elástico, es decir que retiradas las solicitaciones el cuerpo retomará su forma original, dando lugar a la Teoría de la 1 Elasticidad. Una segunda hipótesis es suponer que las ecuaciones diferenciales son lineales lo cual implica por un lado una mayor limitación a las características del material y además restricciones en el nivel de los desplazamientos (y/o rotaciones) y de las deformaciones. Las hipótesis asociadas pueden vericarse luego de realizar el análisis. El objetivo de la Mecánica de Estructuras es establecer expresiones simplicadas que permitan un análisis aproximado sencillo, reduciendo el problema tridimensional a derivadas parciales a uno en derivadas ordinarias cuya variable independiente es la coordenada medida sobre el eje de la pieza. Para ello se introducen un conjunto adicional de hipótesis (Bernoulli, Navier, Saint Venant, etc.) que pasan a tener carácter axiomático 2 dentro de un curso de grado ya que no se verica su cumplimiento. Una forma de evaluar el grado de cumplimiento o no de estas hipótesis adicionales es estudiar ejemplos con geometrías típicas, bajo distintas solicitaciones y/o condiciones de contorno. Como se mencionó antes, no resulta posible obtener una solución cerrada a las ecuaciones que gobiernan la teoría de la elasticidad. Sin embargo si es posible obtener una solución numérica sucientemente aproximada que permita observar el cumplimiento de las hipótesis en casos particulares. En este Anexo se presentan algunos ejemplos de vigas como sólidos tridimensionales, resueltos utilizando la técnica del Método de Elementos Finitos (MEF). Se consideran distintas secciones típicas y se comparan las distribuciones de tensiones que resultan del análisis numérico con el análisis simplicado de la Mecánica de Estructuras. El MEF es una técnica numérica que permite resolver ecuaciones diferenciales a derivadas parciales. Para resolver un problema se siguen los siguientes pasos: Se divide el dominio de análisis en elementos pequeños no solapados. Para las vigas 1 Hipótesis: 2 Axioma: Suposición de algo posible o imposible para sacar de ello una consecuencia. Cada uno de los principios fundamentales e indemostrables sobre los que se construye una teoría 1 utilizaremos elementos prismáticos (en la dirección de la viga) con base cuadrilátera o triangular (en el plano de la sección). Estos elementos comparten nudos en sus vértices y a la mitad de sus aristas. Las incógnitas a determinar son los desplazamientos de estos puntos, con lo cuales se determinan deformaciones y con ellos las tensiones. Para establecer condiciones de contorno en cada nudo y en cada dirección del espacio pueden indicarse el valor del desplazamiento o la fuerza externa aplicada (no ambos). A medida que se presenten los ejemplos será posible visualizar estas características y se introducirán otros detalles asociados. Hipótesis más importantes utilizadas en el curso A continuación se mencionan las principales hipótesis introducidas a lo largo del curso, se indican cuales pueden ser evaluadas a priori, cuales a posteriori y cuales requieren de un análisis tridimensional para su evaluación (objetivo principal de este Apéndice). Fundamentos de Elasticidad Las principales hipótesis son: 1. Que la variación espacial de los desplazamientos (derivadas de los desplazamientos respecto a las coordenadas) es pequeña frente a la unidad (notar que son adimensionales). Por pequeña frente a la unidad debe entenderse menores a 0,01. Esto implica que tanto deformaciones como rotaciones son pequeñas. 2. Que es válida la ley de Hooke. Es decir que las tensiones que aparecen en el material son proporcionales a las deformaciones (con un factor de proporcionalidad constante). Esto impone una mayor restricción sobre la hipótesis 1 ya que muchos materiales llegan a su tensión límite de proporcionalidad con deformaciones mucho menores que 0,01 La primera hipótesis debe comprobarse a posteriori, es decir que una vez realizado el análisis debe vericarse que los desplazamientos y rotaciones no superen valores prejados. En general esta comprobación está también asociada con condicionantes de diseño, así suele estar limitada la relación entre el máximo desplazamiento y la luz (distancia entre apoyos) de la estructura o el máximo giro permitido. La segunda hipótesis requiere de dos vericaciones, primero que el material a utilizar responda según la ley de Hooke, lo cual requiere ensayos de laboratorio (que es una evaluación previa al análisis) y segundo que las tensiones no superen el límite de proporcionalidad del material (o la tensión admisible si son las cargas de trabajo). Esta segunda evaluación es posterior al análisis. 2 Fundamentos de la Resistencia de Materiales 3 Se enuncian los siguientes 3 principios , los cuales no son estrictamente principios (verdades indiscutibles): 1. Rigidez: Las ecuaciones de equilibrio se pueden formular sobre la geometría indeformada, es decir, sin considerar los movimientos provocados sobre el sistema de cargas. 2. Superposición: Los efectos que un sistema de fuerzas origina sobre una estructura son iguales a la suma de los efectos que originan cada una de las fuerzas del sistema actuando por separado 3. Saint Venant: En una pieza prismática, las tensiones que actúan sobre una sección recta, alejada de los puntos de aplicación de un sistema de cargas, sólo dependen de la fuerza y del momento resultante de las fuerzas situadas a un lado de la sección considerada El principio de rigidez es equivalente a la hipótesis de pequeños desplazamientos y giros. Dice que la estructura original sin tensiones y la estructura deformada son indistinguibles. La determinación de los desplazamientos y de la geometría deformada permiten evaluar si esto es cierto en cada caso. Además debe observarse que no existan importantes esfuerzos de compresión que puedan producir fenómenos de inestabilidad. El principio de superposición, matemáticamente resulta de que las ecuaciones que se resuelven son lineales. Lo que debe evaluarse es si no sólo cada análisis individual satisface las hipótesis vistas en el punto anterior si no también la suma (por ej. que las tensiones combinadas no superen el límite de proporcionalidad). El de Saint Venant permite evaluar el comportamiento alejados de las cargas aplicadas, pero también implica entender que la aplicación y/o transferencia de cargas requiere de cuidados especiales para evitar concentraciones de tensiones y/o fallas del material. En estas notas se mostrará mediante ejemplos la variación del comportamiento a medida que se aleja del punto de aplicación. Esfuerzo axil Aquí se introduce la hipótesis de Bernoulli: durante la deformación de una pieza recta sometida a esfuerzo axil las secciones transversales permanecen planas y paralelas a si misma. Esta hipótesis es relativamente sencilla y hay argumentos geométricos y/o matemáticos que permiten aceptarla sin problemas. Es una hipótesis geométrica que implica la misma deformación axial para todos los puntos. Cada bra de la pieza responde en función del módulo de Young del material correspondiente. Aquí también se introduce la idea de que la sección no se deforma durante la deformación, lo que puede descomponerse en dos aspectos: 1. Que dos bras ortogonales entre sí se mantienen ortogonales, lo cual implica que no hay deformación de corte γyz asociada. Esto no trae consecuencia alguna en este caso ya que no son de esperar tales tensiones de corte debido a una fuerza axial 3 Principio: Cada una de las primeras proposiciones o verdades fundamentales por donde se empiezan a estudiar las ciencias o las artes. 3 2. Que las deformaciones axiales en el plano de la sección εy y εz son nulas. Debido al efecto Poisson, si las bras longitudinales están traccionadas, las bras en el plano de la sección se contraen. Esta contracción siempre se incluye en las relaciones constitutivas utilizadas, pues de otra forma se obtendrían tensiones espurias. Flexión pura Aquí se extiende la hipótesis anterior y se la denomina de Bernoulli-Navier : en la deformación de una pieza recta sometida a exión pura, las secciones rectas permanecen planas y normales a la deformada de la directriz. Esta hipótesis geométrica implica que: las deformaciones axiales εx las deformaciones de corte son proporcionales a su distancia al eje neutro γxy y γxz son nulas Ambas hipótesis son razonables y existen argumentos para aceptarlas como válidas. En particular es posible observar que no se requieren tensiones de corte para equilibrar el momento, por lo tanto las deformaciones asociadas pueden ser nulas. Flexión simple La misma hipótesis geométrica se aplica al caso de exión simple, donde la existencia de un esfuerzo cortante de corte T implica la aparición de tensiones de corte τ y por lo tanto deformaciones γ . Claramente aquí la hipótesis no se cumple. Lo que debe entenderse es que desde el punto de vista de la deformación global (o elástica) la inuencia de la deformación cortante es muy baja (al menos para vigas esbeltas de material homogéneo). La ventaja de esta hipótesis es que permite condensar el problema en una ecuación diferencial ordinaria en un única variable. La consecuencia de esta hipótesis es que para evaluar las tensiones de corte debe recurrir a condiciones de equilibrio globales (T = M0 x ) τ, se y locales (teoría de Collignon- Jourasky) además de otras aproximaciones dependientes de la geometría de la sección. Flexión Esviada y Compuesta No introducen nuevas hipótesis, sólo aplicaciones de los principios de superposición y de rigidez. Lo que debe evaluarse es que la combinación de tensiones no supere el rango proporcional, ni que el valor de esfuerzo axial (en el caso de que sea de compresión) sea importante respecto a la carga de pandeo. Esfuerzo de Corte Para obtener la distribución de tensiones de corte en una sección se utiliza la técnica de Collignon-Jourasky. Esta provee de la integral q de las tensiones de corte a lo largo de una línea de la sección. La aplicación requiere de hipótesis adicionales en función de la forma de la sección. La hipótesis habitual es que la tensión τ es constante a lo largo de la línea elegida. En el caso de secciones macizas las líneas utilizadas son normales al esfuerzo de corte. En el 4 caso de secciones de pared delgada esas líneas son normales a la pared. Es posible también obtener la distribución de tensiones de corte debido a un esfuerzo de corte T sobre una sección en forma detallada resolviendo una ecuación diferencial a derivadas parciales de 2do orden sobre el plano de la sección (similar al caso de torsión de Saint Venant). Esta técnica será también usada aquí. Esfuerzo de Torsión Una hipótesis habitual aquí es que la sección puede alabear libremente (torsión de Saint Venant). En tal caso la distribución de tensiones en una viga prismática bajo un momento torsor constante puede obtenerse resolviendo una ecuación diferencial a derivadas parciales en el plano de la sección (usando como incógnita el alabeo o la llamada función de tensión). Si en alguna sección se restringe en parte o totalmente el alabeo (e.g. empotramiento) a entonces la hipótesis no se cumple y se desarrollan mecanismos de equilibrio diferentes, que hacen difícil determinar el estado tensional en forma sencilla. En general la restricción al alabeo es beneciosa para el comportamiento a torsión ya que disminuye las deformaciones y el nivel de tensiones. Adoptando la hipótesis conservativa de que no hay restricción de alabeo, una forma de evaluar cualitativamente el estado tensional es recurrir a la analogía de la membrana. Esto conduce por ejemplo a las hipótesis utilizadas en secciones de pared delgada: abiertas, las tensiones varían linealmente en el espesor, con valores máximos en las caras y de sentido opuesto cerradas, las tensiones con constantes en el espesor El análisis de la torsión no-uniforme (cuando hay restricción de alabeo) requiere de teorías más sosticadas (debidas a V.Z. Vlazov para el caso de secciones de pared delgada) si se pretende mantenerse dentro de una única ecuación diferencial ordinaria, o de modelo numéricos tridimensionales. Sobre los ejemplos Antes de entrar de lleno a los ejemplos hay dos aspectos que deben estar claros. Los programas basados en el MEF en general no resuelven estructuras hipostáticas. Es decir que al menos deben impedirse los posibles movimientos de cuerpo rígido. Esto es así porque desde el punto de vista de los desplazamientos el resultado no sería único. Para ejemplicar esto, No es posible analizar una barra a tracción cuyas únicas condiciones de borde sean las cargas aplicadas en sus extremos. Si el objetivo es vericar una hipótesis de comportamiento, no deben impedirse aquellos comportamiento que contradigan el de la hipótesis. Por ejemplo si se quiere vericar que la sección se mantiene plana, debo permitir que alabee y luego vericar que no lo haga. 5 x/L=0 Min=0.999 Max=1.001 x/L=0.917 Min=0.94 Max=1.06 x/L=0.867 Min=0.987 Max=1.022 x/L=0.973 Min=0. Max=2.3 x/L=1 Min=-2 Max=17 Figura 1: Tensión axial para distintas coordenadas Viga de sección rectangular Consideremos el comportamiento de una de las secciones más sencillas. Con relación L y h = 10 (h = 30cm, b = 10cm y h b =3 L = 3m) Sometida a tracción axial Supondremos que un extremo (x = 0) la carga sobre toda la sección en tanto que el otro extremo en forma uniforme pero sobre P = hb se distribuye en forma uniforme x = L la carga está distribuida también 1/8 de la sección. Esto último permite observar en que medida se cumple del Principio de Saint Venant. En la Figura 1 se muestra la tensión axial para distintos valores de la coordenada x donde M in y M ax indican los rangos gracados (azul corresponde al mínimo y rojo al máximo). Puede observarse que para x = 0,87L las tensiones se encuentran en un rango del 5 % de la tensión media y luego van cambiando rápidamente hasta el extremo de la viga donde los gradientes de tensiones son notorios Sometida a corte constante Supongamos que la viga está empotrada en el extremo izquierdo (x tual aplicada en el extremo libre en la dirección negativa del eje z. = 0) y una carga punEn el empotramiento todos los desplazamientos están restringidos, lo que implica que la sección no puede deformarse, con lo cual si el coeciente de Poisson no es nulo el estado tensional esperado (tracción 6 x/L=0 Min=0.50 Max=1.25 x/L=0.87 Min=0 Max=1.5 x/L=0.9 Min=0.0 Max=1.5 x/L=0.95 Min=0.00 Max=0.15 x/L=1 Min=-0.5 Max=-10.5 Figura 2: Tensión de corte para distintas coordenadas. Carga sobre el centro de la sección. arriba y compresión abajo) conduciría a contracción en la parte superior y expansión en la parte inferior. Esto da lugar a estados tensionales con fuertes gradientes tensionales. A los ν=0. P = 30 se ha supuesto de dos maneras, a)concentrada efectos de este ejemplo utilizaremos una relación de Poisson La aplicación de la carga en el extremo sobre 1/8 de la sección y b) la que resulta de aplicar la técnica de Jourasky. En la Figura 2 se muestra lo que resulta del caso de carga a. z sobre el eje de x. El gráco a la En la Figura 3 se muestran las distribuciones de corte en la dirección simetría de la sección para distintas secciones (x/L) a lo largo del eje izquierda corresponde con el caso a de carga y el de la derecha con el caso b. En este último caso puede notarse el cumplimiento de la hipótesis de Jourasky (que da un valor máximo τxz = 1,5) para todas las secciones salvo el empotramiento. En la Figura 4 se muestran los perles de tensiones normales a lo largo de las mismas líneas. Puede observarse la variación lineal de las mismas en todos los casos (asociado con la hipótesis de Bernoullí-Navier) Sometida a un momento torsor constante Si consideramos la solución tabulada (Tabla 7.1 del libro), para un módulo de corte de G = 100GPa y un giro por unidad de longitud de θ = 0,01[1/m] el momento torsor y la máxima tensión de corte son Mt = Gβhb3 θ = 100E9 × 0,263 × 0,3 × 0,13 × 0,01 = 78,9 [kNm] 7 0.01 0.025 0.05 0.5 0.87 0.95 0 0.5 0.00 0.025 0.05 0.5 1.00 τxz 1 1.5 0 0.5 τxz Figura 3: Distribución de las tensiones de corte para distintos valores de distribuida sobre 1/8 1 1.5 x. Izquierda: carga de la sección. Derecha: carga distribuida en forma parabólica. 0.30 0.75 3.96 15.00 26.04 29.25 -60 -40 -20 0 σx 20 40 0.30 0.75 3.96 15.00 26.04 29.25 60 -60 -40 -20 0 σx 20 Figura 4: Distribución de las tensiones normales para distintos valores de estados de carga utilizados. 8 40 x, 60 para los dos Alabeo τxy Max=76.5 τ τxz Max=98.6 Figura 5: Torsión de una sección rectangular (Saint Venant) τmax = Gβbθ 100E9 × 0,263 × 0,1 × 0,01 Mt = = = 98,5 [MPa] 2 αhb α 0,267 La solución numérica de la ecuación diferencial del alabeo conduce a los resultados mostrados en la Figura 5, donde puede verse la forma en que alabea la sección, la distribución de ambas componentes de corte y el ujo de las tensiones de corte. El momento torsor calculado de esta Mt forma resulta Mt = 79,0 [kNm] con lo cual la Inercia a Torsión resulta It = = 7900[cm4 ] Gθ Si sobre la viga: se colocan en cada extremo fuerzas equivalentes a los momentos torsores se restringen los movimientos de cuerpo rígido adecuadamente, es decir sin afectar el movimiento de torsión ni el alabeo entonces se obtendrá la distribución indicada en la Figura 5, al menos en la zona central de la viga, y también en los extremos si los momentos torsores se aplican mediante de la distribución de tensiones indicadas en la gura. Aquí, para el caso tridimensional vamos a considerar dos casos, en ambos casos en el extremo x=L se aplicarán fuerzas equivalentes a la distribución de tensiones mostrada en la Figura 5 en tanto que en el extremo x = 0 consideraremos: Empotramiento perfecto (u = v = w = 0) es decir que se restringirá el alabeo. Empotramiento sin restricción de alabeo (v = w = 0). Esto no basta para restringir los posibles movimientos de cuerpo rígido pues podría desplazarse en la dirección rotar alrededor de los ejes en el plano de la sección en x = 0. x y Aquí se impondrá sobre la sección el modo de alabeo, es decir se indicará la relación que hay entre los distintos 9 x/L=0.01 σx x/L=0.01 τxy x/L=0.01 τxz x/L=0.5 τxy x/L=0.5 τxz Figura 6: Torsión de una sección rectangular con alabeo restringido desplazamientos u de toda la sección. Esto puede hacerse con cierta facilidad en el programa de MEF pero es muy difícil materializar en la realidad. En la Figura 6 se muestran resultados del caso empotrado. Allí puede observarse resultados correspondientes al empotramiento y a la mitad de la viga Las tensiones axiales (σx ) en el empotramiento no son nulas y su distribución coincide con la forma del alabeo de la Figura 5. Las σx a la mitad de la viga no se muestran pero son prácticamente nulas Las tensiones τxy en el empotramiento y a la mitad de la viga tienen la misma forma pero son mayores en el empotramiento Las tensiones τxz en el empotramiento disminuyen notoriamente respecto a las mismas tensiones a la mitad de la viga de las dos observaciones anteriores puede notarse que en el empotramiento el momento torsor está resistido principalmente por tensiones τxy que es la forma más eciente de lograrlo ya que ocurre en los puntos más alejados entre sí En la Figura 7 se muestra la distribución de tensiones de corte para las mismas secciones de la gura anterior. No se indican las tensiones σx que son prácticamente nulas. Puede aquí observarse que no hay diferencia en la distribución de tensiones a lo largo de la viga. Con estas dos variantes del mismo problema se ha intentado mostrar: 10 x/L=0.0 τxy x/L=0.0 τxz x/L=0.5 τxy x/L=0.5 τxz Figura 7: Torsión de una sección rectangular modo de alabeo impuesto La inuencia de la restricción de alabeo en la distribución de tensiones (torsión no uniforme) La precisión de las hipótesis de Saint Venant cuando no hay restricción de alabeo El cumplimiento del principio de Saint Venant. Observar que a la mitad de la sección (antes también) las distribución de tensiones es idéntica independientemente de la condición de contorno en x=0 Sección IPN Consideremos ahora una viga similar a la anterior (empotrada-libre) pero con una sección L IPN200. La longitud de la viga es L = 300 cm de tal forma que la relación = 15. El área h 2 de la sección según tabla es A = 33,5cm Sometida a exión (Tz y My ) Se ha utilizado una carga puntual Pz = 33,5kN (10MPa×Área) en el extremo libre, distribuida en el alma de la sección. En la Figura 8 se muestra la distribución de tensiones de corte obtenida resolviendo la ecuación diferencial correspondiente en la sección de la viga (2D). En la parte inferior de la gura se han gracado los mapas de ambas componentes y 11 10 τxy 26 10 8 6 4 2 0 -2 -4 -6 -8 -10 τxz -10 0 Figura 8: Flexión de una sección IPN200 bajo S_y 25 22.5 20 17.5 15 12.5 10 7.5 5 2.5 0 Tz 26 |τ| 0 25 22.5 20 17.5 15 12.5 10 7.5 5 2.5 0 constante. Tensiones de corte el módulo. En tanto que en la parte superior se muestra el ujo de las tensiones de corte en el ala y en la zona del cuello. A los nes de comparar con las fórmulas simplicadas resultantes de la aproximación de Collignon-Jourasky en la Figura 9 se muestran perles de variación de las componentes de tensiones de corte. A la izquierda se muestra la variación de la componente coordenada (y z. τxz con la Se indican 2 perles uno correspondiente al eje de simetría de la sección = 0) y otro que en la zona del alma coincide con la pared (y = 3,75mm). En la zona recta del alma se observa la variación parabólica de las expresiones simplicadas, principalmente en el eje de simetría, en tanto que en la línea de la pared hay un leve aumento de la tensión al llegar a la zona de empalme. Luego una disminución rápida hasta 0. En la gura derecha se ha gracado la componente τxy sobre el ala superior de la sección. La curva indicada como externa se reere al borde superior del perl, en tanto que la línea indicada como interna corresponde a la parte inferior del ala. Desde el extremo del ala hasta prácticamente el comienzo de la zona de empalme con el alma las tensiones de corte varían linealmente y tienen el mismo valor en ambos bordes. Sometida a exión (Ty y Mz ) En el caso que la carga actúe según la dirección y (Py = 33,5kN ) el ujo de corte en el empalme de ala y alma y la distribución de tensiones de corte resultan las presentadas en la 12 10 8 externa interna 6 4 τxy 2 0 -2 -4 zona curva -6 -8 -10 -40 -20 0 20 40 Y Figura 9: Flexión de una sección IPN200 bajo Figura 10. Las tensiones τxz Tz constante. Perles de tensiones de corte son prácticamente nulas en todos los puntos salvo en las zonas entrantes del empalme. Finalmente en la Figura 11 se muestran los perles de tensiones del ala y el borde interno del ala (b) a lo largo del eje z τxy en (a) el borde externo (eje de simetría). Puede verse que en el caso (a) se obtiene la distribución parabólica salvo en la zona del empalme donde la inuencia del mismo produce una disminución de la tensión en el borde externo y un aumento en el interno. El gráco (b) muestra que en la zona del alma la tensión τxy es prácticamente nula y luego rápidamente crece al llegar al empalme con el alma Sometida a un momento torsor constante It = 14,6cm4 , para un módulo de elasticidad transversal G = 100GP a y un giro por unidad de longitud θ = 0,01[1/m]. Se tiene que el momento De la tabla de perles se obtiene que torsor resulta Mt = GθIt = 100 × 109 × 0,01 × 14,6 × 10−8 [N m] = 146[N m] y la máxima tensión de corte es aproximadamente N Mt tmax = Gθtmax = 109 × 11,3 × 10−3 = 11,3 [M P a] = It m2 τmax La solución de la ecuación diferencial del alabeo conduce a los resultados mostrados en la Figura 12, donde puede verse la forma en que alabea la sección, la distribución de ambas componentes de corte y el módulo de las tensiones de corte. Los valores indicados con 13 M ax 24 13 24 22 20 18 16 14 12 10 8 6 4 2 0 τxy S_y 11.5 9.5 7.5 5.5 3.5 1.5 -0.5 -2.5 -4.5 -6.5 -8.5 -10.5 -12.5 τxz 0 14 24 22 20 18 16 14 12 10 8 6 4 2 0 |τ| 0 -13 Figura 10: Flexión de una sección IPN200 bajo 26 Ty constante. Tensiones de corte τxy 20 10 Externa Interna 0 -40 empalme -20 0 20 Y 40 τxy 20 10 Alma espesor constante 0 -100 -50 0 Figura 11: Flexión de una sección IPN200 bajo 50 Z Ty 100 constante. Perles de tensiones de corte son los valores extremos (+/−) de las líneas de nivel (salvo en el módulo que el valor mínimo es 0), no los valores máximos obtenidos que siempre son un poco mayores, el objetivo es poder relacionar mapas de tensiones en dos guras diferentes. El momento torsor calculado 4 es Mt = 132[Nm], y el It = 13,2[cm ]. Notar que las máximas tensiones de corte son un 50 % mayores que las obtenidas por las fórmulas simplicadas. Nuevamente para el caso tridimensional vamos a considerar dos casos, en ambos en el x = L se aplicarán fuerzas equivalentes a la distribución de tensiones Figura 12 (Mx = 132N m) en tanto que en el extremo x = 0 consideraremos extremo la Empotramiento perfecto (u = v = w = 0) mostrada en es decir que se restringirá el alabeo. Empotramiento en el plano de la sección (v = w = 0) más la imposición del modo de alabeo resultante del análisis 2D. En la Figura 13 se muestran resultados del caso empotrado. Allí puede observarse resultados correspondientes al empotramiento y a la mitad de la viga Las tensiones axiales (σx ) en el empotramiento no son nulas y su distribución coincide con la forma del alabeo de la Figura 12. Las σx a la mitad de la viga no se muestran pero son prácticamente nulas Las tensiones τxy en el empotramiento (a diferencia de la mitad de la viga) no se equilibran en cada ala (en el ala superior hay una resultante negativa y en el ala inferior una resultante positiva). 15 τxy Max=17 Alabeo τxz Max=13.5 |τ| Max=18.2 Figura 12: Torsión de una sección IPN200 (Saint Venant) Las tensiones τxz en el empotramiento son muy bajas salvo en la zona del cuello En el empotramiento el mecanismo que equilibra el el momento torsor resulta de las resultantes no nulas de las tensiones τxy en cada ala. En la Figura 14 se muestra la distribución de tensiones de corte para las mismas secciones de la gura anterior. No se indican las tensiones σx que son prácticamente nulas. Puede aquí observarse que no hay diferencia en la distribución de tensiones a lo largo de la viga. Las conclusiones de estas dos variantes del mismo problema son las mismas que en el ejemplo anterior. Sección HEB (IPB) Consideremos ahora la misma viga de la sección anterior pero con una sección HEB200. Sometida a exión (Pz y My ) Se ha utilizado una carga puntual Pz = 78, 1kN (10MPa×Área) en el extremo libre, distribuida en el alma de la sección. En la Figura 15 se muestra la distribución de tensiones de corte. En la parte inferior de la gura se han gracado los mapas de ambas componentes. En tanto que en la parte superior se muestra el ujo de las tensiones de corte en la zona del cuello. A los nes de comparar con las fórmulas simplicadas resultantes de la aproximación de Collignon-Jourasky en la Figura 16 se muestran perles de variación de las componentes de tensiones de corte. A la izquierda se muestra la variación de la componente coordenada (y = 0) z. τxz con la Se indican 2 perles uno correspondiente al eje de simetría de la sección y otro que coincide con la pared. En la zona de espesor constante se observa la 16 x/L=0 σx x/L=0.0 τxy Max=0.34 x/L=0.0 τxz Max=0.23 x/L=0.5 τxy Max=1.54 x/L=0.5 τxz Max=1.26 Figura 13: Torsión de una sección IPN200 con alabeo restringido x/L=0.0 τxy Max=1.54 x/L=0.0 τxz Max=1.27 x/L=0.5 τxy Max=1.54 x/L=0.5 τxz Max=1.27 Figura 14: Torsión de una sección rectangular modo de alabeo impuesto 17 +16.4 49.0 S_y 14 11 8 5 2 -1 -4 -7 -10 -13 -16 τxy 48 42 36 30 24 18 12 6 0 τxz 0.00 -16.4 Figura 15: Flexión de una sección HEB200 bajo Tz constante. Tensiones de corte variación parabólica de las expresiones simplicadas, principalmente en el eje de simetría, en tanto que en la línea de la pared hay un leve aumento de la tensión al empezar a cambiar el espesor y luego una disminución rápida hasta 0. En la gura derecha se ha gracado la componente τxy sobre la parte izquierda del ala inferior de la sección. La curva indicada como externa se reere al borde superior del ala, en tanto que la línea indicada como interna corresponde a la parte inferior del ala. Desde el extremo del ala hasta muy cerca del comienzo de la zona de empalme con el alma las tensiones de corte varían linealmente y son prácticamente iguales entres sí. Sometida a exión (Py y Mz ) En el caso que la carga actúe según la dirección y (Py = 78,1kN ) el ujo de corte en el empalme de ala y alma y la distribución de tensiones de corte resultan las presentadas en la Figura 17. Las tensiones τxz son prácticamente nulas en todos los puntos salvo en las zonas entrantes del empalme. Finalmente en la Figura 18 se muestran los perles de tensiones las caras del alma y (b) a lo largo del eje z τxy en (a) a lo largo de (centro del alma). Puede verse que en el caso (a) se obtiene la distribución parabólica salvo en la zona del empalme donde la inuencia del mismo produce una disminución de la tensión en la cara externa y un aumento en la interna. El gráco (b) muestra que en la zona del alma la tensión crece al llegar al empalme con el alma 18 τxy es nula y luego rápidamente 100 0 -5 centro pared interna externa τxy z [mm] 50 zona del alma con espesor constante 0 -10 -50 zona curva -15 -100 -80 -60 -40 -20 0 Y -100 0 20 τxz 40 Figura 16: Flexión de una sección HEB200 bajo Tz constante. Perles de tensiones de corte 21.7 9.5 S_y 20 18 16 14 12 10 8 6 4 2 0 τxy τxz 9.5 7.125 4.75 2.375 0 -2.375 -4.75 -7.125 -9.5 -9.5 0 Figura 17: Flexión de una sección HEB200 bajo 19 Ty constante. Tensiones de corte 100 Z 15 τxy Alma con espesor constante 50 20 0 10 empalme 5 -50 0 -100 -75 -50 -25 0 Y 25 50 75 100 -100 0 Figura 18: Flexión de una sección HEB200 bajo Ty 5 10 τxy 15 constante. Perles de tensiones de corte Sometida a un momento torsor constante De la tabla de perles del INTI (tomadas de la vieja norma DIN de 1963) se obtiene 4 que It = 49,1cm , este valor está calculado en forma simplicada usando la expresión para secciones delgadas It = 1 2 × 200 × 153 + 170 × 93 × 10−4 = 49,1cm4 3 (en una tabla más moderna, provista por un fabricante alemán, para el mismo perl aparece 59,3), para un módulo de elasticidad transversal longitud θ = 0,01[1/m]. G = 100GP a y un giro por unidad de Se tiene que el momento torsor resulta Mt = GθIt = 100 × 109 × 0,01 × 49,1 × 10−8 [N m] = 491[N m] y la máxima tensión de corte es aproximadamente N Mt = 15 [M P a] tmax = Gθtmax = 109 × 15 × 10−3 It m2 τmax = La solución de la ecuación diferencial del alabeo conduce a los resultados mostrados en la Figura 19, donde puede verse la forma en que alabea la sección y la distribución de ambas componentes de corte y el módulo de las tensiones de corte. Los valores indicados con M ax son los valores máximos obtenidos. El momento torsor calculado es 595Nm, que es en este caso un 20 % superior al de la tabla del INTI y es casi idéntico al provisto por el fabricante. 20 Alabeo τxy Max=20.6 τxz Max=18.25 |τ| Max=22.7 Figura 19: Torsión de una sección HEB200 (Saint Venant) 21 x/L=0 σx x/L=0.0 τxz Max=20 x/L=0.0 τxy Max=18.9 x/L=0.5 τxy Max=20.4 x/L=0.5 τxz Max=18 Figura 20: Torsión de una sección HEB200 con alabeo restringido Para el caso tridimensional vamos a considerar el caso con empotramiento perfecto (u = v = w = 0) en x = 0 y en el extremo x = L se aplicarán fuerzas equivalentes a la distribución de tensiones mostrada en la Figura 19 correspondientes a un momento torsor Mx = 5,95kN m. En la Figura 20 se muestran resultados. Allí puede observarse resultados correspondientes al empotramiento y para x/L = 0,792 Las tensiones axiales (σx ) en el empotramiento no son nulas y su distribución es similar a la forma del alabeo de la Figura 19 pero las tensiones son mayores en las caras internas del perl que en las externas. τxy Las tensiones en el empotramiento (a diferencia de la mitad de la viga) no se equilibran en cada ala (en el ala superior hay una resultante negativa y en el ala inferior una resultante positiva). Esto es mas notorio aquí que en el el perl IPN. Las tensiones τxz en el empotramiento son muy bajas salvo en la zona del cuello En el empotramiento el mecanismo que equilibra el el momento torsor resulta de las resultantes no nulas de las tensiones τxy en cada ala y también (en mucha menor medida) el debido a τxz que en los extremos de cada ala son no nulos de sentidos opuestos y con un brazo de palanca de todo el ancho del perl. Finalmente en la Figura 21 se muestra una vista de la viga deformada (magnicada) donde se han pintado las tensiones axiales σx que aparecen en el empotramiento debido a la 22 Z Y X Figura 21: Torsión no uniforme de una sección HEB torsión no uniforme. Estas tensiones tienen su mayor importancia en el empotramiento, a la x mitad de la viga ( = 7,5) están han bajado a un 10 % de las máximas. b Sección UPN Consideremos ahora una sección con un sólo eje de simetría UPN200. A diferencia de los casos anteriores el centro de gravedad de la sección no corresponde al centro de corte. Sometida a exión Supondremos una carga Pz = 10[MPa] × A = 32,2[kN] actuante en el centro de corte. Según las tablas de perles estándar el centro de corte se encuentra (sobre el eje y debido a y1 = −39,4 mm desde el centro de gravedad o y2 = 23,5 mm desde el centro del alma o y3 = −19,3mm desde el borde externo del perl. Este valor se determina la simetría) en la posición para las tablas mediante fórmulas aproximadas. Determinación del Centro de Corte En este caso la solución de una ecuación diferencial en el plano de la sección permite obtener la distribución de tensiones de corte. Obtenidas estas tensiones de corte, se determina la linea de acción de la resultante de tales tensiones y se obtiene el centro de corte. Esta determinación implica una integral de área de las tensiones calculadas que puede hacerse en forma sencilla desde dentro del programa que resuelve la ecuación diferencial. En este caso se obtiene que y1 = −39,1 mm desde el centro de gravedad. 23 τxy 10.9S_x 10.5 8.4 6.3 4.2 2.1 0 -2.1 -4.2 -6.3 -8.4 -10.5 -10.9 τxz |τ| 22.6S_y mod 22.6 22.5 20.25 18 15.75 13.5 11.25 9 6.75 4.5 2.25 0 20.9524 18.8571 16.7619 14.6667 12.5714 10.4762 8.38095 6.28571 4.19048 2.09524 0 0.0 0.0 Figura 22: Flexión de una sección UPN200 bajo Tz constante. Tensiones de corte En la Figura 22 se muestra la distribución de tensiones de corte. En la parte inferior de la gura se han gracado los mapas de ambas componentes y el módulo. En tanto que en la parte superior se muestra el ujo de las tensiones de corte en el ala superior y en la zona del cuello. A los nes de comparar con las fórmulas simplicadas resultantes de la aproximación de Collignon-Jourasky en la Figura 23 se muestran perles de variación de las componentes de tensiones de corte. A la izquierda se muestra la variación de la componente coordenada z τxz con la a lo largo del alma en sus caras externa e interna. En la zona del alma se observa la variación parabólica de las expresiones simplicadas en la zona de espesor constante y luego una variación casi linea hasta 0 en los extremos. En la gura derecha se ha gracado la componente τxy sobre el ala superior de la sección. La curva indicada como externa se reere al borde superior del ala, en tanto que la línea indicada como interna corresponde a la parte inferior del ala. En la zona recta del ala la variación es bastante parecida a una lineal y son ligeramente diferentes entre los bordes hasta las cercanía de la zona de empalme donde la tensión en el borde interno tiene un pico. En el caso que la carga actúe según la dirección y el ujo de corte en el empalme de ala y alma y la distribución de tensiones de corte resultan las presentadas en la Figura 24. Las tensiones τxz son prácticamente nulas en las alas. Finalmente en la Figura 25 se muestran los perles de tensiones τxz en (a) una línea a lo largo de las caras del alma y (b)τxy a lo largo de las caras del ala superior . Puede verse que 24 100 12 zona curva 9 externa interna Interna Externa τxy 0 espesor constante Z 50 6 3 -50 0 0 25 50 Y -100 0 5 10 τxz 15 20 25 Figura 23: Flexión de una sección UPN200 bajo τxy 31 S_x 30 27 24 21 18 15 12 9 6 3 0 0.0 Tz constante. Perles de tensiones de corte τxz |τ| 32.5mod 31.8S_y 31 27.9 24.8 21.7 18.6 15.5 12.4 9.3 6.2 3.1 0 28.0476 22.1429 16.2381 10.3333 4.42857 -1.47619 -7.38095 -13.2857 -19.1905 -25.0952 -31 -31.8 Figura 24: Flexión de una sección UPN200 bajo 25 0.0 Ty constante. Tensiones de corte 100 30 externa interna exterior Interior 25 Z τxy 20 espesor constante 15 0 -100 -20 0 τxz 10 zona curva 5 0 -20 -10 0 10 20 Y 30 40 50 20 Figura 25: Flexión de una sección UPN200 bajo Ty constante. Perles de tensiones de corte en el caso (a) se obtiene la distribución lineal salvo en la zona del empalme. El gráco (b) muestra la variación esperada sobre la cara externa (recta), en tanto que en la cara interna (curva) se puede ver el fuerte gradiente al llegar al empalme con el alma Sometida a un momento torsor constante It = 11,23cm4 (12.6 según otras G = 100GP a y un giro por unidad de De la tabla de perles se obtiene que un módulo de elasticidad transversal 0,01[1/m]. tablas), para longitud θ = Se tiene que el momento torsor resulta Mt = GθIt = 100 × 109 × 0,01 × 11,23 × 10−8 [N m] = 112[N m] y la máxima tensión de corte es aproximadamente N Mt tmax = Gθtmax = 109 × 11,5 × 10−3 = 11,5 [M P a] = It m2 τmax La solución de la ecuación diferencial del alabeo conduce a los resultados mostrados en la Figura 26, donde puede verse la forma en que alabea la sección y la distribución de ambas componentes de corte y el módulo de las tensiones de corte. El momento torsor resulta Mx = 122Nm 10 % mayor que el que indica la tabla del INTI (valores conservativos) Para el caso tridimensional vamos a considerar el caso con empotramiento perfecto (u = v = w = 0) en x = 0 y en el extremo x = L se aplicarán fuerzas equivalentes a la distribución de tensiones mostrada en la Figura 26. 26 τxy Max=15.6 Alabeo τxz Max=13.2 |τ| Max=16.6 Figura 26: Torsión de una sección UPN200 (Saint Venant) En la Figura 27 se muestran resultados. Allí puede observarse resultados correspondientes al empotramiento y para x/L = 0,792 Las tensiones axiales (σx ) en el empotramiento no son nulas y su distribución es similar a la forma del alabeo de la Figura 26 . Las tensiones τxy en el empotramiento (a diferencia de la mitad de la viga) no se equilibran en cada ala (en el ala superior hay una resultante negativa y en el ala inferior una resultante positiva).. Las tensiones τxz en el empotramiento son muy bajas comparadas con el resto de la viga. En el empotramiento el mecanismo que equilibra el el momento torsor resulta principalmente de las resultantes no nulas de las tensiones τxy en cada ala. Finalmente en la Figura28 se muestra una vista de la viga deformada (magnicada) donde se han pintado las tensiones axiales σx que aparecen en el empotramiento debido a la torsión no uniforme. Estas tensiones tienen su mayor importancia en el empotramiento, a x mismo ( = 10) están han bajado a un 10 % de las máximas b 27 0,9m del x/L=0 σx x/L=0.0 τxy Max=1,37 x/L=0.0 τxz Max=1,0 x/L=0.79 τxy Max=15.3 x/L=0.79 τxz Max=11.7 Figura 27: Torsión de una sección UPN200 con alabeo restringido X Y Z Figura 28: Torsión no uniforme de una sección UPN 28