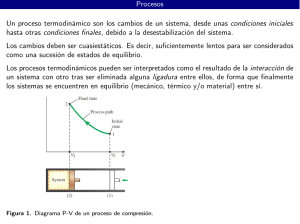
Proceso Estocástico
Anuncio

Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Proceso Estocástico
Un fenómeno estadístico que evoluciona en el tiempo de acuerdo a leyes probabilísticas
se llama proceso estocástico .
La serie de tiempo puede ser vista como una realización, producto de esa ley
probabilística. Al analizar una serie de tiempo la estamos concibiendo como una
realización de un proceso estocástico (Box-Jenkins-Reinsel 1994).
Cada x t es la realización de cierta variable aleatoria X t . Una serie de tiempo x t de T0
datos, {x t , t ∈ T0 }, es una muestra de tamaño uno del vector de T0 variables aleatorias
ordenadas en el tiempo, es decir, es una realización de la familia de variables aleatorias
{X t , t ∈ T0 }.
Algunas definiciones
Un proceso estocástico es una familia de variables aleatorias {X t , t ∈ T } definidas en un
espacio de probabilidad {Ω, F, P}, donde T es un subconjunto de R, generalmente
puntos del tiempo {0, ±1, ±2, ...}; {0, 1, 2, 3, ...}; [0; ∞]; (-∞; ∞).
Nota: Para cada t ∈ T , X t es una función en Ω. Por otra parte, para cada ω ∈ Ω ,
X t (ω ) es una función en T .
Una realización de un proceso estocástico se define como una función {X (ω ), ω ∈ Ω}
en T, que también se conoce con el nombre de trayectoria del proceso {X t , t ∈ T }.
Otra forma de definir estos conceptos:
Un proceso estocástico es un conjunto de variables aleatorias {Z t } y t toma valores en
cierto conjunto C (días, meses, trimestres, años).
Para cada t ∈ C está definida una v.a. {Z t } y los valores observados en diferentes
momentos forman una serie temporal.
Una serie de T datos ( z1 , z 2 ,..., z T ) es una muestra de tamaño 1 del vector de T variables
aleatorias ordenadas en el tiempo y la serie observada se considera la realización o
trayectoria del proceso estocástico.
El proceso queda caracterizado si definimos la distribución de probabilidad conjunta de
las variables aleatorias ( Z 1 , Z 2 ,..., Z T ), ∀T . Conoceremos la estructura probabilística de
un proceso estocástico cuando se conozcan estas distribuciones.
Ejemplo 1: Sean A y θ variables aleatorias independientes, A ≥ 0; θ ∈ U [0,2π ]. Un
proceso estocástico {X t , t ∈ T } puede definirse en términos de A y θ para cualquier
v ≥ 0 y r > 0:
1
1
X t = A cos(vt + θ ) , ó, más explícitamente, X t (ω ) = A(ω )cos(vt + θ (ω )) con ω ∈ Ω .
r
r
1
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Las realizaciones de este proceso son las funciones de t que se obtienen al fijar ω , es
decir
1
x (t ) = a cos(vt + θ ) .
r
1. La función de distribución de un proceso estocástico:
{X t , t ∈ T ⊂ R} y Γ el conjunto de vectores
Sea
Γ = { t = (t1 , t 2 , K , t n ) ∈ T n : t1 < t 2 < K < t n ; n = 1,2, K}.
Las funciones de distribución (de dimensión finita) de
{Ft (.), t ∈ Γ} definidas para t = (t1 , t 2 ,K, t n ) por
(
{X t , t ∈ T }
son las funciones
)
Ft ( X ) = P X t1 ≤ x1 , X t2 ≤ x 2 ,...., X tn ≤ x n , X = ( x1 , ..... x n )'∈ R n
.
Cada observación es una variable aleatoria y la misma evoluciona en el tiempo de
acuerdo a ciertas leyes probabilísticas.
X t = ε t + θε t −1 , con E (ε t ) = 0 ; V (ε t ) = σ 2 ; COV (ε t , ε s ) = 0 si t ≠ s . Un
{
}
{
}
grupo particular de ε 0 ,K, ε T produce un conjunto x 0 ,K, xT , un grupo diferente de
épsilons, produciría otro conjunto distinto de x’s. Hay infinitos conjuntos de
realizaciones posibles en t=1, 2, 3, ...,T.
Ejemplo:
{
}
El modelo define así una distribución conjunta para las variables aleatorias X 0 ,K X T .
Los momentos del proceso estocástico se definen con respecto a la distribución de las
variables aleatorias X 0 ,K, X T . Pero el problema es que tenemos sólo una observación
para cada momento del tiempo (t), lo que da paso a la idea de estacionariedad.
La importancia del concepto de estacionariedad radica en que, dado que sólo contamos
con una observación para cada momento del tiempo, una única realización, que las
series manifiesten tener propiedades invariantes en el tiempo cobra una importancia
fundamental. En la práctica pocas series presentan esta característica, la mayoría son no
estacionarias, pero se han diseñado filtros que la transforman en una serie con
comportamiento estable, más adelante veremos qué transformaciones se puede aplicar y
los efectos que inducen. De todos modos hay que considerar que la observación de esta
característica depende del período de observación, esto es, del período que abarca las
observaciones con que contamos, pues una serie puede ser estable durante un período
corto pero no estacionaria en un período mayor. Si consideramos la variable
temperatura de la tierra, esta serie puede ser estacionaria si consideramos un período de
20 años, en cambio, puede mostrar una tendencia creciente si ampliamos
sustancialmente el período de medición.
Hay dos formas equivalentes de enfocar el tema de series de tiempo, desde el dominio
del tiempo y desde el dominio de las frecuencias. El primer enfoque se apoya en una
herramienta fundamental para el análisis, la función de autocovarianzas. El segundo
enfoque se basan en la extensión del análisis de Fourier, que se apoyan en la idea de
que, en un intervalo finito, cualquier función analítica puede ser aproximada, con el
2
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
grado de precisión deseado, aproximándola mediante una suma ponderada de funciones
seno y coseno en las frecuencias armónicas. Un proceso Yt puede ser modelizado
mediante una suma ponderada de componentes periódicos a los que se les superimpone
un componente aleatorio.
Función de medias del proceso
E (Z t ) = µ t
Un caso particular se da cuando todas las variables tienen la misma media , en ese caso
la función de medias es una constante. Las realizaciones del proceso no mostrarán
tendencia y diremos que el proceso es estable en media.
Función de varianzas del proceso
Esta función proporciona las varianzas en cada instante temporal :
V ( Z t ) = σ t2
El proceso es estable en varianza, si esta función es constante en el tiempo.
Un proceso puede ser estable en media y no en varianza y viceversa.
La estructura de dependencia lineal entre las variables aleatorias del proceso se
representa por la funciones de autcovarianzas y autocorrelación.
Función de autocovarianzas del proceso
Es una función que describe las covarianzas entre dos variables de proceso en dos
instantes cualesquiera.
Si {X t , t ∈ T } es un proceso estacionario en media y con V ( X t ) < ∞ para cada t∈T,
entonces la FACov γ X (.,.) de {X t } se define como:
γ (t , t + j ) = Cov( X t , X t + j ) = E[( X t − µ t )( X t − j − µ t )]
γ (t , t ) = Var ( X t ) = σ t2
Las autocovarianzas tienen dimensiones, las del cuadrado de la serie, por lo que son no
convenientes para comparar series medidas en unidades distintas.
Se puede quitar esta dimensión y tener una medida de la dependencia lineal mediante la
función de autocorrelación.
3
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Estacionariedad estricta
Un proceso es estrictamente estacionario si sus propiedades no se ven afectadas por un
cambio en el período de análisis, si la distribución conjunta asociada a un conjunto de m
observaciones x1, x2,......xm es la misma a la asociada a x1+k, x2+k,.........xm+k.
La serie de tiempo {X t , t ∈ Z } se dice estrictamente estacionaria si las distribuciones
conjuntas de ( X t1 ,...., X tk )' y ( X t1 + h ,...., X tk + h )' son las mismas para todo entero
positivo k, y para todo t1 , K , t k , k ∈ Z . La distribución conjunta de cualquier conjunto
de variables no se modifica si trasladamos las variables en el tiempo.
La obtención de las distribuciones de probabilidad del proceso es posible en ciertas
situaciones, por ejemplo variables climáticas, donde suponer que cada año se observa
una realización del mismo proceso. Pero en ocasiones sólo se observa una realización
del proceso.
El proceso estocástico existe conceptualmente pero no es posible obtener realizaciones
o muestras sucesivas del mismo, entonces para estimar las características transversales
del proceso es necesario suponer que esas propiedades son estables a lo largo del tiempo
(concepto de estacionariedad).
Estacionariedad débil
La serie de tiempo {X t , t ∈ Z }con
débilmente estacionaria si:
E [X t ] = µ ∀t ∈ Z
Z = {0,±1,±2,K} es covarianza estacionaria ó
E [X t − µ ] < ∞ ∀t ∈ Z
γ (t , t + j ) = Cov( X t , X t + j ) = E[( X t − µ t )( X t − j − µ t )] = γ j ∀j.t ∈ Z
2
La estacionariedad débil no garantiza la estabilidad completa del proceso, porque la
distribución de la variable aleatoria Xt puede estar cambiando en el tiempo. Pero si
suponemos que las variables tienen distribución conjunta normal n-dimensional, como
esta queda determinada por las medias, varianzas y covarianzas , entonces todas las
distribuciones de subconjuntos y las marginales serán idénticas, por o tanto, en este
caso, la estacionariedad débil y estricta coinciden.
La función de autocorrelación (FAC) del proceso estacionario {X t } es una medida
normalizada de la función de autocovarianza y se define como
ρ (t , t + j ) =
Cov( X t , X t + j )
σ tσ t + j
=
γj
γ (t , t + j )
= ρj =
γ0
γ (t , t ) γ (t + j , t + j )
A diferencia de la función de autocovarianzas la función de autocorrelación es
independiente de la escala de medidade la serie, γh = ρh σ2 .
La función de autocorrelación simple (FAS) representa los coeficientes de
autocorrelación (ρ k ) en función del retardo k.
4
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Combinación de procesos estacionarios
Los procesos estacionarios son estables ante combinaciones lineales, los procesos
obtenidos mediante combinaciones lineales de procesos estacionarios son todos
estacionarios.
Ejemplo
Sea Z t un proceso estacionario y Wt = Z t − Z t −1
E (Wt ) = E ( Z t ) − E ( Z t −1 ) = µ − µ = 0
Var (Wt ) = Var ( Z t ) − Var ( Z t −1 ) + 2Cov( Z t , Z t −1 ) = σ 2 + σ 2 + 2γ 1 = 2(σ 2 + γ 1 )
Cov(WtWt + k ) = E[( Z t − Z t +1 )( Z t + k + Z t + k −1 )] = E[ Z t Z t + k − Z t Z t + k −1 − Z t −1 Z t + k + Z t −1 Z t + k −1 ]
= 2 γ k − 2 γ k −1 = 2( γ k − γ k −1 )
⇒ esperanza, varianza y covarianzas no dependen de t ⇒ Wt es estacionario.
Resultado general:
Sea Z t = ( Z 1t ,..., Z kt ) k procesos estacionarios.
Consideremos al proceso escalar definido por :
Yt = c' Z t = c1 Z 1t + ... + c k Z kt ,
con
c' = (c1 ,..., c k )
E (Yt ) = c' E ( Z t ) = c1 E ( Z 1t ) + ... + c k ( Z kt ) = c' µ
µ' = (µ1 ,..., µ k ) vector de medias, como E ( Z ti ) = µ i son constantes ⇒ E (Yt ) es
constante.
Var (Yt ) = E (c' ( Z t − µ)( Z t − µ)c) = c' Γz c
Γz es la matriz de varianzas y covarianzas entre las componentes, como las
componentes son estacionarias, la matriz de covarianzas entre ellas también lo es.
Cov(Yt , Yt + k ) = c' Γz (k )c
Γz (k ) contiene las covarianzas entre los componentes en distintos instantes, que por
hipótesis sólo dependen del retardo.
⇒ Yt es estacionario.
Una consecuencia de este resultado es que las autocovarianzas tienen que cumplir
ciertas condiciones correspondan a un proceso estacionario.
Sea Yt = c1 Z t + c 2 Z t −1 + ... + c k Z t − k
Var (Yt ) = c' Γz (k )c debe ser no negativa
5
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
γ0
γ
Γ(k ) = 1
M
γ k −1
γ1
γ0
L
...
O
L
L
γ k −1
γ k −2
M
γ 0
la matriz de autocovarianzas de orden k del proceso Z t es definida no negativa.
Para una secuencia de números pueda ser una FACov de un proceso estacionario, esta
secuencia debe verificar que la matriz de autocovarianzas asociada de orden k debe ser
definida no negativa.
Si considero un proceso con γ 0 = 1 ⇒ γ k = ρ k
1 ρ1 L ρ k −1
ρ
O
M
1
→R=
debe ser también definida no negativa.
M
O M
ρ k −1 L L 1
Propiedades de la función de autocovarianzas
a) γ k = γ −k
b) γ 0 = Var (Yt ) > 0
c) γ k ≤ γ 0
d )Γk → matriz _ semidefinida _ positiva
e)ρ k =
γk
γ0
d) Que las matrices de autocovarianza y autocorrelación sean definidas positivas
implica que su determinante y los menores principales sean mayor que 0.
1
• Sea n=2 , ρ1
1
•
Sea n=3
ρ1
ρ2
ρ1
>0→
1
ρ1
1
ρ1
ρ2
ρ1 > 0 ,
1
1 − ρ12 > 0
1 − ρ12 > 0ρ12 > 1 → −1 < ρ1 < 1
ρ12 < 1
1
ρ1
ρ1
>0
1
1
ρ2
ρ2
>0
1
6
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
implica que: − 1 < ρ1 < 1
− 1 < ρ2 < 1
ρ 2 − ρ12
−1 <
<1
1 − ρ12
Ejercicios:Discutir la estacionariedad
Caso 1.
X t = α cos(θ t ) + β sen(θ t ), t ∈ Z
α y β v.a. no corr.
E (α ) = E ( β ) = 0; V (α ) = V ( β ) = 1; θ fijo.
Note que cos( X ± Y ) = cos( X )cos(Y ) ± sen ( X )sen (Y )
Caso 2.
Y t = X 1 + X 2 + .... + X t
X t → NI (0, σ 2 );
E (Y t ) = 0
Serie de Tiempo Gaussiana o Normal
El proceso {X t } se dice Gaussiano o Normal si y sólo si las funciones de distribución de
{X t } son todas Normales Multivariadas.
Nota: Si {X t , t ∈ Z } es un proceso Gaussiano y débilemnte estacionario, entonces es
estrictamente estacionario, ya que para todo n ∈ {1,2,K} y para todo h, t1 , t 2 K ∈ Z los
vectores ( X t1 ,...., X tk )' y ( X t1 + h ,...., X tk + h )' tienen la misma media y matriz de
covarianzas, y por tanto la misma distribución.
Operador de Rezagos
Notaremos L al operador de rezagos. Es un operador lineal, tal que, aplicado a
x t produce x t −1 :
Lxt = xt −1 .
Se extiende fácilmente a más rezagos L j x t = x t − j , j = 0,1,K
L puede manipularse como cualquier cantidad algebraica.
Una constante se interpreta como una función que es constante en el tiempo, por tanto
aplicar el operador de rezagos a una constante, no da lugar a modificaciones.
L(a) = a , a = cte.
Es un operador lineal, por tanto si:
L(a Xt + b Yt) = a Xt-1 + b Yt-1
Sea un proceso autorregresivo de orden 1
7
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
xt = φ xt −1 + ε t
φ ( L) = (1 − φ L )xt = ε t
∞
∞
j =0
j =0
xt = ∑ φ jε t − j = ∑ (φL ) ε t =
j
1
εt
1 − φL
Se pueden definir polinomios en el operador de rezagos, esto presenta la ventaja de que
se operan de la misma manera que los polinomios algebraicos ordinarios.
Obsérvese que el resultado de la progresión geométrica implica tratar a L como si
tuviera “magnitud” 1, más allá de lo que el término magnitud pueda significar.
Operador de Diferencias
Un caso particular de operador polinómico es el operador diferencias, se define como
∆ = (1 − L ) . Por tanto, ∆x t = (1 − L )x t = x t − x t −1 , y al igual que en el caso del operador
de rezagos, se generaliza fácilmente a cualquier número de diferencias: ∆ j = (1 − L )
j
Note que ∆2 = (1 − L ) = (1 + L2 − 2 L ) , es decir que ∆2 x t = x t + x t − 2 − 2 x t −1
2
Operador Suma
∞
Sea S= (1-L)-1 = 1 + L+ L2 + .....Lp y tiene el siguiente efecto: Sxt = ∑ xt −1
i =0
8
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
PROCESOS ESTOCASTICOS ESTACIONARIOS
Ruido Blanco
El proceso estocástico débilmente estacionario más simple que se puede definir, se
denomina RUIDO BLANCO (RB). Un proceso estocástico estacionario se denomina
Ruido Blanco si:
1) E ( X t ) = 0 ∀t ∈ Z
σ 2 si k = 0
2) γ ( k ) =
0 si k ≠ 0
Es un proceso con esperanza cero, varianza constante y donde las variables del proceso
están incorrelacionadas para todos los retardos.
El proceso ruido blanco no es necesariamente estacionario en sentido estricto, sólo se
impone incorrelación, por tanto no necesariamente las variables son independientes. Si
se impone la condición de que las variables del proceso tienen distribución normal, el
proceso será estacionario en sentido estricto. Bajo estas características el proceso se
denomina ruido blanco gaussiano.
Ejemplo:Se simulan 1500 observaciones de un proceso ruido blanco gaussiano
-3
-2
-1
0
w
1
2
3
w=rnorm(1500,0,1)
plot.ts(w)
par(mfrow=c(2,1))
autoc_rb<-acf(w,lag.max=24,main="Autocorrelograma Ruido Blanco")
pacf_rb<-pacf(w,lag.max=24,main="Autocorrelograma Parcial Ruido
Blanco")
autoc_rb
pacf_rb
0
500
1000
1500
Time
9
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
0.4
0.0
AC F
0.8
Au to c o rre lo g ra m a Ru id o B la n c o
0
5
10
15
20
Lag
0.02
-0.04
Partial A C F
Au to c o rre lo g ra m a P a rc ia l Ru id o B la n c o
5
10
15
20
Lag
Autocorrelations of series 'w', by lag
0
1
2
3
4
5
6
7
8
9
10
1.000 0.009 0.020 -0.011 0.006 -0.005 -0.003 -0.019 -0.023 0.022 -0.009
11
12
13
14
15
16
17
18
19
20
21
-0.021 -0.001 -0.009 -0.028 -0.014 0.017 0.020 0.010 0.006 -0.046 -0.017
22
23
24
-0.023 -0.003 0.024
Partial autocorrelations of series 'w', by lag
1
2
3
4
5
6
7
8
9
10
11
0.009 0.020 -0.011 0.006 -0.005 -0.004 -0.018 -0.023 0.023 -0.009 -0.023
12
13
14
15
16
17
18
19
20
21
22
0.000 -0.009 -0.029 -0.014 0.019 0.020 0.007 0.005 -0.046 -0.018 -0.023
23
24
-0.002 0.026
Procesos Autorregresivos
Los modelos autorregresivos se basan enla idea de que los valores corrientes de la serie
puede ser explicados a partir de los p valores pasados, como combinación lineal de los
mismos.
10
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
El proceso {X t , t ∈ T } se dice autorregresivo de orden p; X t → AR ( p ) ⇔
X t = φ1 X t −1 + φ 2 X t − 2 + ..... + φ ` p X t − p + ε t , donde ε t es un ruido blanco y los φ ’s son
coeficientes fijos.
Utilizando el operador de rezagos definido previamente, podemos re-escribir la
expresión anterior:
(1 − φ 1 L − φ 2 L2 − ..... − φ ` p L p ) X t = ε t .
Podemos escribir sintéticamente el polinomio en L:
(1 − φ1 L − φ 2 L2 − ..... − φ` p Lp ) = φ ( L) ⇒ φ ( L) X t = ε t
Xt =
εt
φ (L)
A partir de un RB genero X t . La introducción de los rezagos de X t es lo que introduce
correlación en el proceso (correlación que el RB no tiene).
Cuando p = 1 tenemos un caso muy simple que se presenta a continuación.
Proceso autorregresivo de orden uno, AR(1)
X t = φX t −1 + ε t
Ejemplo:
t
0
1
2
3
4
5
6
εt
-0,12
0,20
0,06
-0,18
-0,04
0,00
X t (φ = 0,5)
0,16
-0,04
0,18
0,15
-0,105
-0,09
-0,045
A partir de t = 1, genero un ruido blanco, a partir de ese ruido, de X 0 y de φ ; genero el
resto de la serie. Con este ejemplo muy simple, vemos que se requiere un punto de
partida, un arranque, X 0 = 0,16 en este caso.
Si consideramos la serie de entrada y la de salida, se aprecia es que ε t tiene un
comportamiento más errático que X t , y ello se debe a la parte φX t −1 que es la que da
inercia.
En el trabajo con series temporales estacionarias, iremos viendo que la “forma“ de los
procesos es lo importante. La “forma” del proceso AR(1) no depende de t, es decir, lo
que vale para t, vale para t - 1, t + 1, etc. Ello nos permite utilizar el procedimiento
recursivo, que resulta muy útil para trabajar la serie:
X t = φX t −1 + ε t = φ (φX t − 2 + ε t −1 ) + ε t = φ 2 X t − 2 + φε t −1 + ε t = ......... =
n −1
φ n X t − n + φ n −1ε t − ( n −1) + φ n − 2 ε t − ( n − 2 ) + ..... + φε t −1 + ε t = φ n X t − n + ∑ φ j ε t − j
j =0
Llegados a este punto, nos preguntamos: Dónde comenzó el proceso? En el momento
0?, En el pasado infinito? Veremos a continuación que esta decisión es importante.
11
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Estacionariedad e inicio del proceso
1. El proceso comenzó en t = 0 , con X 0 fijo.
Tenemos que:
n −1
X t = φ X t −n + ∑φ j ε t − j .
n
j =0
t −1
Si tomamos n = t, tenemos: X t = φ t X 0 + ∑ φ j ε t − j
j =0
E( X t ) = µt = φ X 0
t
1 − φ 2 t 2
t −1
t −1
t
σ
φ2 ≠1
V ( X t ) = V φ X 0 + ∑ φ j ε t − j = V ∑ φ j ε t − j = 1 − φ 2
j =0
j =0
tσ 2
φ 2 =1
Obsérvese que la media depende de t, al igual que la varianza, cualquiera sea el valor de
φ. No tenemos por tanto un proceso estacionario.
Veamos la Covarianza:
t + k −1
t −1
t −1
E ( X t . X t + k ) = E ∑φ jε t − j ∑φ jε t +k − j = ∑φ kφ 2 j E (ε 2 t − j ) =
j =0
j =0
j =0
t −1
φ kV ( X t ) φ 2 ≠ 1
φ k ∑φ 2 jσ 2 =
φ2 =1
j =0
V ( X t )
La covarianza también depende de t (porque la varianza depende de t) como era de
esperar.
Por tanto, si el proceso comenzó en t = 0, con X 0 fijo (no aleatorio), no tenemos
estacionariedad.
El caso φ =1 tampoco es estacionario, pero es un caso muy especial, conocido como
paseo aleatorio.
2. El proceso comienza en t = -∞ (|φ | < 1)
En la medida en que el proceso comenzó en el pasado remoto, (t = -∞) el primer término del
proceso desaparece, con lo cual queda redefinido como:
∞
X t = ∑φ jε t − j
0
E( X t ) = µt = φ t X 0 = 0
∞
∞
σ2
V ( X t ) = V ∑ φ j ε t − j = σ 2 ∑ φ 2 j =
= γ (0)
1−φ 2
0
j =0
Cov( X t . X t + k ) = γ (k ) = φ k γ (0)
Por lo tanto, basta con que |φ | < 1 para que el proceso sea estacionario, cuando éste
comenzó en t = -∞ .
Note que ρ ( k ) = γ ( k ) / γ (0) = φ k
12
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
3. El proceso comienza en t = 0, pero con X 0 una variable aleatoria
E( X 0 ) = 0 y V ( X 0 ) =
σ
2
1−φ2
y además, X 0 no está correlacionado con ε 1 , ε 2 ,K etc.
X 0 se piensa como una variable aleatoria que es igual al proceso en estado estacionario.
Además consideramos el caso |φ | < 1.
E ( X t ) = µ t = E (φ t X 0 ) = 0
t −1
t −1
φ 2t
1 − φ 2t 2
σ2
2
V ( X t ) = V φ t X 0 + ∑ φ j ε t − j = V (φ t X 0 ) + V ∑ φ j ε t − j =
σ
+
σ
=
2
1−φ 2
1−φ 2
j =0
j =0
1−φ
la varianza de la suma es la suma de las varianzas porque la COV [X 0 , (ε 1 , ε 2 ,K)] = 0 .
Calculemos ahora las Covarianzas: COV ( X t , X t + k ) .
t −1
X t = φ t X 0 + ∑φ jε t− j
j =0
X t +k = φ t +k X 0 +
t + k −1
∑φ
j =0
j
ε t +k − j
2t
t −1
σ2
σ2
σ2
k
k
k
2 1−φ
2
2j
2t + k
+ φ σ ∑φ = φ
+φ σ
=φ
E ( X t X t +k ) = φ
1−φ 2
1−φ 2
1−φ 2
1−φ 2
j =0
Como puede verse, ninguno de los momentos depende de t, por lo que el proceso es
estacionario1.
El punto de partida es importante, pero como vimos, no es preciso que comience en -∞,
basta con que lo haga en t = 0, con X 0 en la solución estacionaria pero en ambos casos
2t + k
se requiere que φ < 1 .
4. Si φ = 1 y X 0 ≡ 0 . E ( X t ) = µ t = 0; V ( X t ) = tσ 2 ; COV ( X t ; X s ) = min(t , s )σ 2 .
Este caso es, como puede apreciarse, no estacionario, y se conoce como Camino
Aleatorio. El tipo de no estacionariedad que propone este modelo es interesante.
Obsérvese que:
X t = X t −1 + ε t
X t −1 = X t − 2 + ε t −1 ⇒ X t = X t − 2 + ε t −1 + ε t ⇒
t −1
X t = X 0 + ∑ε t− j
j =0
el efecto de cualquier suceso que ocurra en el pasado se queda para siempre impactando
la dinámica de la serie. Esta es una diferencia clave con los procesos estacionarios,
donde el impacto de lo ocurrido en el pasado remoto tiende a desaparecer, en la medida
en que φ j se hace más y más pequeño.
El tipo de no estacionariedad que se genera cuando φ > 1 es muy especial, genera
procesos explosivos, en la medida en que lo que sucedió en el pasado se hace cada vez
más importante.
Ejemplo
Simulación en R de un camino aleatorio con deriva (random walk with drift)
1
No se ha dicho nada de la distribución de las variables, por lo que no sabemos si es estrictamente estacionario.
13
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
0
10
20
xd
30
40
50
set.seed(154)
w=rnorm(200,0,1);x=cumsum(w)
wd=w+0.2;xd=cumsum(wd)
plot.ts(xd, ylim=c(-5,55))
0
50
100
150
200
Time
autoc=acf(xd,lag.max=40)
0.4
0.0
0.2
AC F
0.6
0.8
1.0
S e rie s x d
0
10
20
30
40
Lag
Simulación en R de un camino aleatorio (random walk )
set.seed(170540)
w=rnorm(200,0,1);x=cumsum(w)
plot.ts(x)
14
0
-5
x
5
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
0
50
100
150
200
Time
Observaciones
Muchas de las consideraciones serán extensibles al modelo AR(p), con p > 1,
1. Diferencia entre esperanza incondicional y esperanza condicional, E ( X t ) y
E ( X t X t −1 )
Sea el proceso: X t = φX t −1 + ε t
La esperanza incondicional, E ( X t ) = 0
En cambio la esperanza condicional, E ( X t X t −1 ) = φ X t −1
donde X t −1 está dado, es un dato y será en general diferente de cero.
2.En el curso, en general supondremos que T representa los números enteros, por lo
que supondremos que el proceso comenzó en -∞.
3. X t está correlacionado con ε t , ε t −1 , ε t −2 ,K , (el pasado ) pero no con ε t +1 , ε t + 2 ,K ,(el
futuro).
∞
Ello resulta evidente en la formulación del proceso como X t = ∑ φ j ε t − j .
La COV (X t , ε t − j ) = φ σ para j > 0 , pero COV (X t , ε t + j ) = 0 .
j
j =0
2
4.El proceso AR(1) es estacionario si φ < 1 y ocurre:
iii-
El proceso comienza en t = −∞ .
El proceso comienza en t = 0 en la solución estacionaria
15
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Función de autocovarianzas de un AR(1)
Si sabemos que X t ∼ AR (1) es estacionario, entonces
X t = φ X t −1 + ε t
E ( X t ) = E (φX t −1 + ε t ) ⇒ µ = φµ ⇒ µ = 0.
Multiplicando por X t a ambos lados de la definición del proceso, y tomamos esperanza
tenemos:
E ( X t X t ) = φE ( X t X t −1 ) + E ( X t ε t )
γ 0 = φγ 1 + σ 2
Multiplicando X t por X t −1 a ambos lados y tomamos esperanza tenemos:
E ( X t −1 X t ) = φE ( X t −1 X t −1 ) + E ( X t −1ε t )
γ1 = φ γ 0 + 0 = φ γ 0
Si ahora multiplicamos X t por X t −k con k > 1, y tomamos esperanza, tendremos:
γ k = φ γ k −1 ⇒
γ 0 = φγ1 +σ 2
γ1 = φγ 0
γ k = φ γ k −1
En general, γ k = φ k γ 0 ∴ ρ k = φ k
Este método de cálculo para la función de autocovarianza es válido si el proceso es
estacionario.
La expresión de la función de autocorrelación de un proceso AR(1) es igual a las
potencias del perámetro φ y decrece geométricamente hacia cero. Si el parámetro es
positivo, la dependencia lineal del presente de los valores pasados es siempre
positiva. Si el parámetro es negativo, la dependencia es positiva para los rezagos
pares y negativa para los impares.
•
Hasta ahora hemos trabajado con X t ∼ AR (1) con media 0. El proceso se generaliza
fácilmente para media ≠ 0. Podemos pensar en X t con E ( X t ) = µ ≠ 0 . Definamos
entonces X t* = X t − µ .
Este nuevo proceso es tal que:
X t − µ = φ ( X t −1 − µ ) + ε t , de donde X t = φ X t −1 + µ (1 − φ ) + ε t
•
Obsérvese que en la definición del proceso aparecerá una constante, pero esa
constante no es la media del proceso, µ , sino que está multiplicada por (1 − φ ) .
16
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Existen 2 posibles formas para la función de autocorrelación de un AR(1)
Ejemplo:
Usando R para simular un AR(1)
1. φ = 0.8
0
-4
-2
a r1 .s i m
2
4
ar1.sim<-(arima.sim(list(order=c(1,0,0),ar=0.8),n=200))
plot(ar1.sim)
0
50
100
150
200
Tim e
Función de autocorrelación de la serie simulada
autoc<-acf(ar1.sim,lag.max=20)
ACF
0 .0
0 .2
0 .4
0 .6
0 .8
1 .0
S e r ie s a r 1 .s im
0
5
10
15
20
Lag
autoc
Autocorrelations of series 'ar1.sim', by lag
0
1.000
11
0.092
1
0.776
12
0.048
2
0.625
13
0.020
3
0.501
14
0.006
4
0.376
15
0.001
5
0.279
16
0.009
6
0.217
17
0.022
7
8
9
0.200 0.184 0.132
18
19
20
0.022 -0.014 -0.005
10
0.095
17
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
2 φ = -0.8
1
0
-3
-2
-1
a r1 .s i m
2
3
ar1.sim<-(arima.sim(list(order=c(1,0,0),ar=-0.8),n=200))
plot(ar1.sim)
0
5 0
1 0 0
1 5 0
2 0 0
T im e
autoc<-acf(ar1.sim,lag.max=20)
a r 1 .s im
-0 .5
0 .0
ACF
0 .5
1 .0
S e r ie s
0
5
10
15
20
Lag
autoc
Autocorrelations of series 'ar1.sim', by lag
0
1
1.000 -0.753
11
12
-0.032 0.003
2
3
0.578 -0.392
13
14
0.027 -0.056
4
5
0.281 -0.203
15
16
0.044 -0.082
6
7
0.164 -0.088
17
18
0.053 -0.034
8
9
0.071 -0.066
19
20
0.018 -0.004
10
0.038
Verifique usando el paquete R que, para valores de φ pequeños (en un proceso AR(1)),
la caída a 0 es rápida.
18
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Otra forma de verificar si un proceso AR(1) es estacionario es verificando el signo de la
raíz de la siguiente ecuación característica (1 − φ L ) = 0 . El proceso es estacionario si la
raíz es > 1 en valor absoluto.
1
(1 − φ L) = 0 ⇒ L =
φ
Esta condición es equivalente a φ < 1 .
Proceso autorregresivo de segundo orden, AR(2)
Muchos de los resultados obtenidos hasta aquí pueden generalizarse a procesos de
mayor orden, pero hay una serie de temas que no aparecen en un proceso AR(1) y que
ahora analizaremos el proceso AR(2).
X t = φ 1 X t −1 + φ 2 X t − 2 + ε t , donde ε t es un proceso ruido blanco.
Como vimos nos interesa particularmente establecer las condiciones de estacionariedad
del proceso.
Si φ1 = φ 2 = 0, obviamente el proceso es estacionario, pues Xt = εt
Reescribamos el proceso como una ecuación en diferencias:
(1 − φ1 L − φ 2 L2 ) X t = ε t ó lo que es lo mismo
φ ( L) X t = ε t ⇒ Ecuación en diferencias
Es una ecuación en diferencias no homogénea2. La solución se halla sumando a la
solución de la homogénea, una solución particular.
Tomando X t − n = 0; X t − ( n +1) = 0; tendremos una solución particular de la forma
n −1
X t = ∑ψ j ε t − j 3.
j =0
2
Al igual que el resto de las ecuaciones matemáticas, las ecuaciones en diferencias admiten una solución para la
variable incógnita, Xt. La solución a la ecuación en diferencias será generalmente otra función, no un único valor.
Esta solución nos informará acerca de cómo se forman los valores de Xt a través del tiempo, de la variable tiempo y
del componente aleatorio, εt .
El procedimiento general de ecuaciones en diferencias parte de la descomposición de la solución completa en dos
partes, la solución homogénea y la solución particular. La ecuación homogénea considera únicamente los valores de
Xt y su pasado, y como todo sistema homogéneo admite la solución trivial o bien un conjunto infinito de soluciones a
partir de dos constantes arbitrarias. La solución particular atiende a la parte formada por el término independiente, si
existe y la perturbación aleatoria εt .El procedimiento de resolución comprenderá cuatro etapas: identificar la
ecuación homogénea y encontrar las n soluciones posibles, encontrar la solución particular, formar la solución
completa como suma de la homogénea y la particular y finalmente eliminar las constantes arbitrarias imponiendo
condiciones iniciales.
3
Se obtiene esta expresión, realizando sustituciones recursivas en
por ejemplo
X t −1 por ( φ1 X t − 2 + φ 2 X t − 3 + ε t −1 )
y
X t = φ 1 X t −1 + φ 2 X t − 2 + ε t , sustituyendo
X t − 2 por ( φ 1 X t − 3 + φ 2 X t − 4 + ε t − 2 )
hasta
19
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Para encontrar la solución de la ecuación homogénea de (1 − φ1 L − φ 2 L2 ) X t = 0 es
preciso resolver la ecuación característica: (1 − φ1 L − φ 2 L2 ) = 0 , sean m1 y m2 las raíces
de (1 − φ1 L − φ 2 L2 ) = 0 ; c1 y c 2 constantes a determinar de acuerdo a ciertas
condiciones iniciales (en este caso, por donde pasa X t en 2 momentos X0 y X1).
Al resolver la ecuación característica las posibles soluciones a la ecuación homogénea
son:
1. dos raíces reales y distintas ( m1 ≠ m2 ), 2RR≠: X t = c1 (1 / m1 ) + c 2 (1 / m 2 )
t
2. dos raíces reales e iguales ( m1 = m2 = m ): X t = ( c1 + c 2 t )(1 / m )
t
3. dos raíces complejas conjugadas ( m1 ≠ m2 ): X t = c1 (1 / m1 ) + c 2 (1 / m 2 )
t
t
t
La solución de la ecuación en diferencias no homogénea es la suma de la particular y la
homogénea:
n −1
X t = c1 (1 / m1 ) t + c 2 (1 / m 2 ) t + ∑ψ j ε t − j para los casos 1 y 3 y
j =0
n −1
X t = (c1 + c 2 t )(1 / m ) + ∑ψ j ε t − j en el caso 2.
t
j =0
Pero para que podamos decir que el proceso es estacionario, la solución no deberá
depender de las constantes c1 y c 2 , ya que éstas a su vez dependen de las condiciones
iniciales vinculadas a momentos específicos del pasado. Si ello ocurriera, la idea de
estacionariedad se vería comprometida. Para que el proceso sea estacionario, es preciso
que la solución sea independiente de las condiciones iniciales.
En el caso de 2RR≠, m1 ≠ m2 .
Si al tiempo [ t − n ] y [ t − (n + 1) ] cuento con ciertas condiciones iniciales, es decir,
conozco dos valores del proceso, X t −n y X t −(n +1) , tenemos:
X t −n
1
= c1
m
1
X t − n −1
t −n
1
= c1
m1
1
+ c 2
m2
t − n −1
t −n
1
+ c 2
m2
t − n −1
Inicio del Proceso
Nuevamente es preciso discutir diferentes situaciones:
1. El proceso comenzó en t = 0 .
2. El proceso comenzó en t = −∞ (n = ∞ ) .
llegar a
X t − n y X t − ( n +1)
que se asumieron como 0. Desaparecen así las x’s del lado derecho, quedando una suma
sólo en ε’s rezagados.
20
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
3. El proceso comenzó en t = 0 , pero con X t −n y X t −n −1 v.a. en la solución
estacionaria.
Veamos el caso 2. Aquí es preciso que m1 y m2 sean ambos mayores que 1 en valor
absoluto, de manera que al ser elevados a la n = ∞ , c1 y c 2 se hagan 0, y de este modo
se independiza la solución de las condiciones “iniciales” X t −n y X t −n −1 .
0
0
647
48 647
48 ∞
∞
t
La solución queda: X t = c1 (1 / m1 ) + c 2 (1 / m 2 ) t + ∑ψ j ε t − j = ∑ψ j ε t − j , y de esta
j =0
j =0
forma X t se independiza del pasado infinito.
Ejercicio: demostrar que si el proceso comenzó en t = 0 el proceso no es estacionario, y
que si comenzó en t = 0 con X t −n y X t −n −1 variables aleatorias en la solución
estacionaria, el proceso es estacionario, exactamente igual que en el caso AR(1).
Representación del proceso como una suma de innovaciones
Determinación de los ψ k
Trabajaremos de ahora en más suponiendo que el proceso comenzó en el pasado
remoto, en t = −∞ . Por lo tanto, el proceso AR(2), como acabamos de demostrar,
puede escribirse como:
∞
∞
k =0
k =0
X t = ∑ψ k ε t −k = ∑ψ k Lk ε t =ψ ( L)ε t
Por otra parte, en la definición del proceso escribimos:
1
φ ( L) X t = ε t , de donde X t =
εt .
φ ( L)
Igualando los coeficientes de ε t , tenemos:
1
ψ ( L)ε t =
ε ⇒ψ ( L)φ ( L) = 1
φ ( L) t
(ψ 0 + ψ 1 L + ψ 2 L2 +ψ 3L3 + ...)(1 − φ1 L − φ 2 L2 ) = 1
ψ0 =1
ψ 1 −ψ 0φ1 = 0 ⇒ ψ 1 = φ1
ψ 2 −ψ 1φ1 −ψ 0φ 2 = 0; y en general
ψ k −ψ k −1φ1 −ψ k −2φ 2 = 0 ∀k ≥ 2
(1 − φ L − φ L )ψ
2
1
2
k
=0
Esta es la misma ecuación en diferencias que define al proceso AR(2). Además
conocemos condiciones iniciales: ψ 0 = 1 y ψ 1 = φ1 .
21
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Para qué trabajar con los ψ k ? En ocasiones es más fácil trabajar con el proceso
∞
planteado en la forma X t = ∑ψ k ε t −k , por ejemplo para calcular Esperanzas, Varianzas
k =0
y Covarianzas.
Las soluciones posibles a 1 − φ1 L − φ 2 L2 = 0 son las mismas que mencionáramos
precedentemente, ya que la ecuación característica es la misma:
a) 2 Raíces Reales distintas:
ψ t = c1 (1 / m1 )t + c 2 (1 / m2 )t ; ψ 0 = 1, ψ 1 = φ1
ψ 0 = c1 + c 2 = 1
c1 c 2
+
= φ1
m1 m 2
m1 y m2 a su vez son función de φ1 y de φ 2 por lo cual c1 y c 2 también lo serán.
Una vez determinados c1 y c 2 se reemplazan en la fórmula para calcular ψ t
quedando así determinado ψ t para todo t.
b) 2 Raíces Reales iguales:
ψ t = (c1 + c 2 t )(1 / m )t
ψ 0 = c1 = 1
ψ1 =
c1 + c 2
= φ1
m
Idem al caso anterior, se determinan c1 y c 2 y se reemplazan en la fórmula para
calcular ψ t .
c) 2 Raíces Complejas y Conjugadas:
ψ1 =
Siendo i = − 1 , las raíces de la ecuación característica serán de la forma
m = a ± bi = re ± iθ = r (cos(θ ) ± isen(θ ) ) = re ± iθ
r = a ± bi = a 2 + b 2
cos(θ ) =
θ:
sen(θ ) =
a
r
b
r
−π ≤θ ≤ π
Observación:
La igualdad entre la forma trigonométrica y exponencial r (cos(θ ) ± isen(θ ) ) = re ± iθ
Proviene de los siguientes desarrollos de cos θ y de i sen θ en el punto θ = 0 :
θ2 θ4 θ6
cosθ = 1 −
+
−
+ .......
2! 4! 6!
3
5
7
iθ
iθ
iθ
isenθ = iθ −
+
−
+ .......
3!
5!
7!
22
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
θ 2 iθ 3 θ 4
cosθ + isenθ = 1 + iθ −
−
+
+ ......... = e iθ
2!
3!
4!
A estas representaciones se les denomina forma cartesiana, trigonométrica y
exponencial.
La solución general tiene la misma estructura que se mostró antes:
t
t
t
1
1
1
ψ t = c1 e − iθ t + c 2 e iθt = [(c 2 + c1 )cos (θ t ) + i (c 2 − c1 )sen (θ t )]
r
r
r
c1 y c 2 serán también complejos conjugados:
con c1 + c2 =A y c2 – c1 = B
A = C cos (δ)
B = C sen (δ)
y es equivalente a escribir:
ψ t = C (1 / r ) t [sen (θ × t − δ )]
t
1
domina la tendencia. Si r > 1, tiende a 0 al tender t a ∞. Si r < 1, tiende a ∞ al
r
tender t a ∞.
t
t
1
1
El parámetro define la amplitud de la representación C . Para que la
r
r
secuencia representada por Yt sea convergente, será necesario que r > 1 en valor
absoluto.
El parámetro θ representa la frecuencia angular y define el número de ciclos por
unidad de tiempo, la inversa del período. La frecuencia se mide en radianes.
El parámetro δ representa la fase, la situación del ciclo en cada momento del tiempo,
define la ordenada en el origen t = 0.
ψ 0 = c1 + c 2 = 1
1
ψ 1 = [(c 2 + c1 ) cos θ + i (c 2 − c1 ) sen θ ] = φ 1
r
Como c1 y c 2 son complejos conjugados, los ψ t son siempre reales.
Aunque esta expresión es algo compleja de obtener, permite establecer con sencillez
los patrones de evolución temporal del proceso, ya que lo que obtuvimos es una
función trigonométrica sencilla de representar, con claros patrones periódicos.
Cuando las raíces son reales, la convergencia a 0 es exponencial. Cuando las raíces son
complejas, la convergencia a 0 es oscilante.
23
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Ejemplo: AR(2)
1- (1 − 0,75L + 0,125L2 )X t = ε t
2- (1 − 0,8 L + 0,6 L2 )X t = ε t
−1
m2
n −t
1
c1
1
1 c1
m1
m1n −t X t −n
+ ∑ψ k ε t −k ; y =
entonces:
X t = t
t
1 X t −n −1
c 2 m2 − m1 − m1
m1 m2 c 2 k =0
n −t
m2n −t
m2
n −1
m2 m1
− 1 1
1
1
n − n X t −n +
n + n X t −n −1 + ∑ψ k ε t −k
X t =
k =0
m2 − m1 m1 m2
m2 − m1 m1 m2
n −1
En este caso particular, m1 = 2 y m2 = 4 .
n −1
1 4
2
1 −1 1
X t = n − n X t −n + n + n X t −n −1 + ∑ψ k ε t −k
22
4
22
4
k =0
Como las raíces son mayores que 1, a medida que crece n el pasado va perdiendo
importancia, y el proceso depende cada vez menos de condiciones iniciales.
Si hacemos n = 1 :
X t = 0,75 X t −1 − 0,125 X t − 2 + ε t
En el segundo ejemplo las raíces serán complejas:
0,8 ± − 1,76 2
1 − 0,8 z + 0,6 z 2 = 0 ⇒ z = a ± bi =
= ± 1,10554 i . Podemos expresar
1,2
3
esto de diferentes formas más o menos convenientes. Una forma que permite visualizar
el comportamiento tanto de la FAC como de los ψ k es hacer que aparezca el módulo
del complejo: r.
r = a 2 + b 2 = 1,291
cosθ = 0,5164 ⇒θ = 0,3273π
a ± bi = r (cosθ ± i sen θ ) = re ± θi = 1,291e ± 0,3273πi
la fórmula que deriváramos para ψ k era:
k
k
1
1
1
ψ k = c1 e − i θ k + c 2 e i θ k =
r
r
r
ψk
1
=
1,291
k
[(c 2
k
[(c 2 + c1 ) cos (θ k ) + i (c 2 − c1 ) sen (θ k )]
+ c 1 ) cos (0,3273 π k ) + i (c 2 − c 1 ) sen (0,3273 π k )]
calculando c1 y c 2 (tarea) obtenemos:
k
ψk
1
=
[cos (0,3273 π k ) − i 0,603 sen (0,3273 π k )]
1,291
La expresión del segundo paréntesis oscilará acotada, por lo que (como ya sabemos) la
convergencia estará determinada sólo por la expresión en el primer paréntesis.
En este caso, 1 = 0,7746 < 1 , y por tanto los ψj irán a 0 a medida que k crezca. La
1,291
evolución será precisamente la mostrada en el gráfico de ψj presentado anteriormente.
24
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Ejemplo en R
0
-4
-2
ar2
2
4
1. Raíces complejas
set.seed(5)
ar2=arima.sim(list(order=c(2,0,0),ar=c(0.8,-0.6)),n=150)
plot.ts(ar2,axes=F);box();axis(2)
axis(1,seq(0,150,25))
abline(v=seq(0,150,10),lty="dotted")
0
25
50
75
100
125
150
Time
Grafico la Función de autocorrelación
-0.5
0.0
acf
0.5
1.0
acf=ARMAacf(ar=c(0.8,-0.6),ma=0,50)
plot(acf,type="h",xlab="lag")
abline(h=0)
0
10
20
30
40
50
lag
25
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Cálculo de los primeros 50 ψ
ARMAtoMA(ar=c(0.8,-0.6),ma=0,50)
[1]
[6]
[11]
[16]
[21]
[26]
[31]
[36]
[41]
[46]
8.000000e-01
1.997440e-01
-1.593131e-02
-1.922306e-02
-3.214780e-03
7.499849e-04
4.237378e-04
3.985274e-05
-2.371677e-05
-8.593650e-06
4.000000e-02 -4.480000e-01 -3.824000e-01 -3.712000e-02
1.820672e-01 2.580736e-02 -8.859443e-02 -8.635996e-02
3.907093e-02 4.081553e-02 9.209866e-03 -1.712142e-02
-5.105593e-03 7.449361e-03 9.022845e-03 2.748659e-03
-4.221019e-03 -1.447947e-03 1.374254e-03 1.968171e-03
-5.809148e-04 -9.147228e-04 -3.832294e-04 2.422502e-04
1.936401e-04 -9.933059e-05 -1.956485e-04 -9.692047e-05
9.003448e-05 4.811594e-05 -1.552794e-05 -4.129191e-05
5.801733e-06 1.887145e-05 1.161612e-05 -2.029974e-06
-5.656935e-06 6.306415e-07 3.898674e-06 2.740555e-06
Gráfico de los primeros 50 ψ
0.6
0.4
0.2
0.0
-0.2
-0.4
ARMAtoMA(ar = c(0.8, -0.6), ma = 0, 50)
0.8
plot(ARMAtoMA(ar=c(0.8,-0.6),ma=0,50),type="l")
abline(h=0)
0
10
20
30
40
50
Index
2. Raíces complejas
set.seed(5)
ar2=arima.sim(list(order=c(2,0,0),ar=c(1.5,-0.75)),n=150)
plot.ts(ar2,axes=F);box();axis(2)
axis(1,seq(0,150,25))
abline(v=seq(0,150,10),lty="dotted")
26
0
-4
-2
ar2
2
4
6
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
0
25
50
75
100
125
150
Time
Grafico la Función de autocorrelación
-0.4
-0.2
0.0
0.2
acf
0.4
0.6
0.8
1.0
acf=ARMAacf(ar=c(1.5,-0.75),ma=0,50)
plot(acf,type="h",xlab="lag")
abline(h=0)
0
10
20
30
40
50
lag
Cálculo de los primeros 50 ψ
ARMAtoMA(ar=c(1.5,-0.75),ma=0,50)
Gráfico de los primeros 50 ψ
plot(ARMAtoMA(ar=c(1.5,-0.75),ma=0,50),type="l")
27
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
1.0
0.5
0.0
-0.5
ARMAtoMA(ar = c(1.5, -0.75), ma = 0, 50)
1.5
abline(h=0)
0
10
20
30
40
50
Index
3. Raíces reales y distintas
0.0
0.2
0.4
acf
0.6
0.8
1.0
set.seed(25)
ar2=arima.sim(list(order=c(2,0,0),ar=c(0.75,-0.125)),n=150)
plot.ts(ar2,axes=F);box();axis(2)
axis(1,seq(0,150,25))
abline(v=seq(0,150,10),lty="dotted")
acf=ARMAacf(ar=c(0.75,-0.125),ma=0,50)
plot(acf,type="h",xlab="lag")
abline(h=0)
0
10
20
30
40
50
lag
Cálculo de los primeros 50 ψ
ARMAtoMA(ar=c(0.75,-0.125),ma=0,50)
28
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Gráfico de los primeros 50 ψ
0.6
0.4
0.2
0.0
ARMAtoMA(ar = c(0.75, -0.125), ma = 0, 50)
plot(ARMAtoMA(ar=c(0.75,-0.125),ma=0,50),type="l")
abline(h=0)
0
10
20
30
40
50
Index
Observación 1: Los ψ k se irán a 0 en forma sinusoidal (raíces complejas) o lo harán
como combinación lineal de términos exponenciales.
Observación 2: Condición de estacionariedad
Para que X t sea una serie estacionaria, necesitamos que los momentos no dependan de
t.
∞
∞
k =0
k =0
X t = ∑ψ k ε t −k ; E ( X t ) = 0; V ( X t ) = σ 2 ∑ψ k2 , ambos momentos son independientes de
t. Además la V ( X t ) debe ser finita. Entonces habrá que exigir que
∞
∑ψ
k =0
2
k
<∞.
∞
1
1
< ∞ ⇒ ∑ψ k2 < ∞ y además ψk ≤ c1 k + c 2 k
k =0
k =0
m1
m2
para el caso de 2 raíces reales y distintas, etc.
∞
∞
∞
COV ( X t X t + s ) = E ∑ψ k ε t −k ∑ψ i ε t + s −i = σ 2 {ψ 0ψ s + ψ 1ψ s +1 + ... } = σ 2 ∑ψ kψ k + s = γ s
i =0
k =0
k =0
no depende de t y además es finita.
Estas son las condiciones que deben cumplir la esperanza, varianza y autocovarianzas
∞
Se puede demostrar que si
∑ψ
k
para que un proceso sea estacionario.
29
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
Observación 3: Condición de estacionariedad sobre φ1 y φ 2
Para que las raíces sean mayores que 1 en módulo,
− φ 1 ± φ1 + 4φ 2
2φ 2
> 1 , debe
φ 2 + φ1 < 1
cumplirse que: φ 2 − φ 1 < 1
φ <1
2
Y esto se puede graficar:
φ2
2
φ2-φ1=1
1
φ2+φ1=1
0
-3
-2
-1
Raíces0Complejas1
2
φ1
3
-1
-2
4φ2+φ12=1
Para que las raíces sean complejas, φ12 + 4φ 2 < 0 . Además las desigualdades son
estrictas, el borde no entra.
Cálculo de los γ k
Los γ k por definición se calculan como la Covarianza entre X t y X t −k . Pero si
sabemos que el proceso AR(2) es estacionario, una forma más simple es:
X t = φ 1 X t −1 + φ 2 X t − 2 + ε t
(i ) E ( X t ) = µ = φ 1 µ + φ 2 µ ⇒ µ = 0
Multiplicamos ahora el proceso por X t , y tomamos esperanza a ambos lados de la
igualdad:
E ( X t X t ) = φ 1 E ( X t −1 X t ) + φ 2 E ( X t − 2 X t ) + E (ε t X t )
γ 0 = φ 1γ 1 + φ 2 γ 2 + σ 2
multiplicando el proceso por X t −1 y tomando esperanza,
γ 1 = φ1γ 0 + φ 2 γ 1 + 0
multiplicando el proceso por X t −2 y tomando esperanza,
γ 2 = φ 1γ 1 + φ 2 γ 0
y en general,
30
Notas del Curso de Series Temporales I. Licenciatura de estadística. Facultad de
Ciencias Económicas y Administración
γ k = φ1γ k −1 + φ 2 γ k − 2 ∀k > 1 ,
es decir, γ k satisface la misma ecuación en diferencias que el proceso X t :
(1 − φ L − φ L )γ
= 0 ∀k > 1 . Las que serán diferentes serán las condiciones iniciales,
las cuales obtendremos a partir de γ 0 , γ 1 y γ 2 .
2
1
1
− φ1
−φ
2
2
− φ1
1
k
− φ 2 γ 0 σ 2
− φ 1 γ 1 = 0
1 γ 2 0
− φ1
Si dividimos en la definición de la ecuación diferencial por γ 0
(1 − φ L − φ L )ρ
tenemos:
= 0 ∀k > 1
A través de los dos ejemplos, tenemos dos modelos para mostrar autocorrelación. Uno
donde los gammas tienden a 0 en forma oscilante, que es el caso de raíces complejas, y
otro donde la evolución hacia cero será una combinación lineal de dos exponenciales.
2
1
2
k
31