UNIVERSIDAD VERACRUZANA TESIS
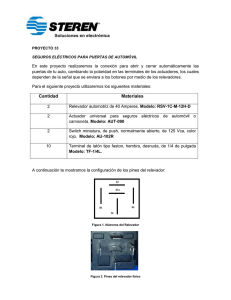
Anuncio

UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERÍA MECÁNICA ELÉCTRICA “APLICACIÓN DEL SOFTWARE COMPUTER AIDED PROTECTION ENGINEERING (CAPE) EN PROTECCIONES A SISTEMAS DE POTENCIA” TESIS QUE PARA OBTENER EL TÍTULO DE: INGENIERO MECÁNICO ELECTRICISTA PRESENTA: NOHÉ RAMÍREZ GARCÍA DIRECTOR DE TESIS: DR. ALFREDO RAMÍREZ RAMÍREZ XALAPA-ENRÍQUEZ, VER. ENERO 2010 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” ÍNDICE INTRODUCCIÓN.................................................................................................... 3 CAPÍTULO I ............................................................................................................ 4 Conceptos básicos y principales consideraciones en la protección por relevadores ............................................................................................................. 4 1.1 Protección por relevadores (definición). ...................................................... 4 1.2 Función de la protección por relevadores.................................................... 7 1.3 Principios fundamentales de la protección por relevadores. ...................... 8 1.4 Características funcionales de la protección por relevadores. ................. 10 1.5 Principales características de los relevadores de protección. .................. 12 CAPÍTULO II ......................................................................................................... 14 Características y fundamentos de la operación de los diferentes tipos de relevadores de protección. ................................................................................... 14 2.1 Clasificación de los relevadores................................................................. 14 2.2 Principio de funcionamiento. ...................................................................... 18 2.3 Relevadores direccionales del tipo de atracción electromagnética ......... 24 2.4 Relevadores de inducción de una sola magnitud. ..................................... 25 2.5 Relevadores de inducción direccionales. .................................................. 28 CAPÍTULO III ........................................................................................................ 35 Transformadores de instrumentos para el accionamiento de los relevadores .. 35 3.1 Transformadores de corriente. ................................................................... 35 3.1.1 Simbología y marcas de polaridad. ..................................................... 38 3.1.2 Circuito equivalente de un transformador de corriente. ...................... 38 3.1.3 Clasificación de los transformadores de corriente para protección. .. 40 3.1.4 Conexiones de transformadores de corriente. .................................... 47 3.2 Transformadores de potencial. .................................................................. 49 3.2.1 Relación de transformación. ................................................................ 50 3.2.2 Clases de precisión. ............................................................................. 50 3.2.3 Conexiones de transformadores de potencial..................................... 52 CAPÍTULO IV ....................................................................................................... 54 Descripción general de la protección de sobrecorriente, direccional y de distancia. ............................................................................................................... 54 4.1 Protección contra sobrecorriente por relevadores. .................................. 54 4.2 Coordinación por ajuste de corriente y por ajuste de tiempo.................... 56 4.3 Relevadores de sobrecorriente de tipo instantáneo. ................................. 59 4.4 Relevadores de sobrecorriente a tierra. .................................................... 59 4.5 Relevadores direccionales. ........................................................................ 60 4.6 Relevadores de distancia. .......................................................................... 64 4.7 Relevador diferencial. ................................................................................. 68 1 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CAPÍTULO V ........................................................................................................ 74 Protección de líneas de transmisión. ................................................................... 74 5.1 Causas de fallas en líneas de transmisión. ............................................... 74 5.2 Protección de líneas con relevadores de sobrecorriente. ......................... 75 5.3 Protección de líneas con relevadores de distancia. .................................. 89 5.4 Protección de líneas con relevadores piloto. ............................................. 98 CAPÍTULO VI .....................................................................................................107 Aplicación del software CAPE. ..........................................................................107 CONCLUSIONES ............................................................................................... 164 BIBLIOGRAFÍA...................................................................................................165 2 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” INTRODUCCIÓN El capital invertido involucrado en un sistema de potencia, para la generación, transmisión y distribución es muy grande que se deben de tomar en cuenta las precauciones propias para asegurar que el equipo opere lo más cercano posible a su máxima capacidad y eficiencia, de éste modo estará protegido contra accidentes. La trayectoria normal de la corriente eléctrica, desde la fuente de generación a través de conductores, en los generadores, transformadores y líneas de transmisión a la carga, se confinan a esta trayectoria por aislamiento. No obstante el material aislante, puede sufrir una avería ocasionada por los efectos de temperaturas altas o por accidentes físicos, y debido a esto se producen las fallas, puesto que la corriente sigue una trayectoria errónea. Lo cual conocemos como cortocircuito o fuga de corriente. De modo que cuando esto sucede se destruye la capacidad del sistema de potencia causando una costosa pérdida o deterioro del equipo, además de una severa baja en el voltaje y pérdida del servicio producido por ésta interrupción. Tales fallas son raramente reparadas por un buen protector de aparatos y líneas de potencia, además de un dispositivo de protección extra que seguramente desviara y neutralizará la falla, aunque inevitablemente y a pesar de estas medidas ocurrirá cierto número de accidentes ocasionados por inesperados relámpagos que condicionan a éste tipo de accidentes. El propósito de los relevadores de protección y sistemas de relevadores, es hacer funcionar correctamente los circuitos para desconectar o parar la falla del equipo tan rápido como sea posible minimizando de éste modo el problema y el daño causado por la falla. Lo ideal sería que se pudiera anticipar la protección y así prevenir las fallas. Por lo tanto aquí es donde se encuentra la importancia de contar con un software para la simulación de dichas fallas y la coordinación de las protecciones, en este caso el software es CAPE, quien en su base de datos se encuentras varias aplicaciones que son de mucha importancia para realizar ejercicios con diferentes tipos de relevadores, así como la simulación de la operación de interruptores, para hacer más eficientes y obtener mejores resultados en las protecciones a sistemas de potencia. 3 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CAPÍTULO I Conceptos básicos y principales consideraciones en la protección por relevadores. 1.1 Protección por relevadores (definición). Al hablar de un sistema de potencia generalmente lo primero que llega a la mente son las enormes redes de transmisión, los transformadores, las grandes centrales generadoras de potencia, etc. Sin embargo todos estos elementos solo son parte de un sistema ya que además existen elementos y componentes que son de vital importancia, uno de ellos es la protección por relevadores. ¿Que es un relevador?; más específicamente, ¿qué es un relevador de protección? El instituto de Ingenieros Electricistas y Electrónicos (IEEE) define al relevador como "un mecanismo eléctrico que está diseñado para interpretar condiciones especificas, se encuentra para responder a la operación de cierre a causa de un cambio abrupto o hechos similares asociados con circuitos eléctricos de control". La siguiente nota ampliará la información: "Las entradas son usualmente eléctricas, pero pueden ser mecánicas, térmicas, u otras cantidades. Los interruptores de límite, y mecanismos simples similares no son relevadores”. La IEEE define un relevador de protección como: "Aquel cuya función es detectar defectos de líneas o aparatos u otras condiciones del sistema de potencia de naturaleza anormal o peligrosa y que inicia una apropiada acción del circuito de control". Los relevadores son utilizados en todas las partes importantes de los sistemas eléctricos de potencia, acompañados por lo regular con fusibles para la detección de las condiciones intolerables. El objetivo principal y primordial de todos los sistemas de potencia es el mantener en un alto nivel la continuidad del servicio, y que cuando ocurran condiciones intolerables, reducir el número de cortes de energía eléctrica. Las pérdidas de potencia, y sobrevoltajes ocurren de cualquier manera, porque es imposible y también poco práctico, poder evitar las consecuencias de eventos naturales y accidentes físicos; como son fallas del equipo, o mala operación debido a errores humanos. Muchas de estas fallas resultan de: descuidos, conexiones accidentales o "descargas" entre conductores de fase o de un conductor de fase a tierra. Las causas naturales que pueden provocar cortocircuitos (fallas) son descargas atmosféricas (voltaje inducido o descarga directa en el conductor), viento, hielo, terremotos, fuego, explosiones, árboles caídos sobre las líneas, objetos voladores, contactos físico de animales y contaminación. Los accidentes incluyen las fallas resultantes de choques de vehículos con los postes o equipo vivo, así como el sabotaje por parte de las personas a las instalaciones y equipos del sistema eléctrico de potencia. Se hace un esfuerzo considerable 4 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” para reducir los posibles daños, pero la eliminación de todos estos problemas semejantes aún no es posible. La mayoría de fallas en un sistema eléctrico de distribución con red de líneas aéreas son fallas de fase a tierra, producto de las descargas atmosféricas, que inducen un alto voltaje transitorio y dañan o flamean el aislamiento. En los sistemas aéreos de distribución, el contacto de árboles con líneas originado por viento es otra fuente de fallas. El hielo, nieve y viento durante tormentas severas pueden originar muchas fallas y daños, al equipo. En algunos casos la descarga originada por eventos de esta naturaleza, no causan daño permanente si el circuito es interrumpido rápidamente. Esta interrupción rápida es una práctica común. Pero en muchos casos se produce una sobretensión en la tensión nominal del sistema causada por este corte momentáneo de energía. El tiempo promedio del corte de energía está en el orden del ½ a 1 ó 2 minutos que es un buen tiempo en comparación con muchos minutos y horas que puede estar fuera el sistema. Las fallas originadas en el sistema no siempre suministran cambios significativos de las cantidades eléctricas del sistema que pueden ser usadas para distinguir las condiciones tolerables de las no tolerables por el sistema. Estos cambios cuantitativos, incluyen sobrecorriente, sobre o bajo voltaje, potencia, factor de potencia, dirección de la corriente, impedancia, frecuencia, temperatura, movimientos físicos y presión. También la acumulación de contaminación en el aislamiento es una fuente de falla muy común que es impredecible y que generalmente significa un incremento en la corriente, por lo que la protección de sobrecorriente es muy aplicada. La protección es la ciencia, técnica o arte de aplicar y seleccionar relevadores y/o fusibles para proporcionar la máxima sensibilidad para la detección de las fallas o condiciones indeseables, y no obstante, evitar su operación en todas las condiciones permisibles o tolerables. En un sistema eléctrico de potencia se deben cuidar los siguientes aspectos: i. ii. iii. iv. Funcionamiento normal. Previsión de una falla eléctrica. Reducción de los efectos de la falla. Protección con relevadores. Cuando se habla de un “funcionamiento normal” se cree que no existen errores humanos, que la naturaleza no castiga al sistema y que el equipo instalado funciona de manera correcta, por mencionar algunas situaciones. También se considera que existen los requisitos mínimos para la alimentación de la carga 5 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” existente, además de tener una cierta cantidad de carga anticipada. Algunas de las consideraciones son las siguientes: i. Selección de la fuente de potencia. ii. Localización de las centrales de generación. iii. Transmisión de la potencia a la carga. iv. Estudio de la carga instalada y de la carga futura. v. Medición. vi. Regulación de la tensión y de la frecuencia. vii. Operación del sistema. viii.Mantenimiento normal. Previsión de una falla eléctrica: Las fallas que ocurren en cualquier sistema eléctrico ocasionan pérdidas, de esta manera se debe instalar equipo adicional al sistema con la finalidad de reducir los daños al mismo y con esto también disminuir las interrupciones del servicio eléctrico debido a fallas. Algunas de las características de funcionamiento y diseño que tienen como finalidad prevenir una falla son los siguientes: i. Provisión de un aislamiento adecuado. ii. Coordinación de la resistencia de aislamiento con las capacidades de los pararrayos. iii. Uso de hilos de guarda y baja resistencia a tierra de las torres. iv. Resistencia mecánica de diseño para reducir la exposición y para disminuir la probabilidad de falla originada por contaminación, granizo, animales, etc. v. Operación y prácticas de mantenimiento apropiados. A continuación se mencionan algunas de las características de diseño y funcionamiento para “reducir los efectos de una falla eléctrica”: 1) Características que reducen los efectos inmediatos de una falla eléctrica: i. Diseño para limitar la magnitud de la corriente de cortocircuito. Evitando concentraciones muy grandes de capacidades de generación. Utilizando impedancia limitadora de corriente. ii. Diseño para soportar los esfuerzos mecánicos y los calentamientos debidos a corrientes de cortocircuito. iii. Dispositivos de baja tensión con acción retardada en interruptores para evitar la caída de la carga durante disminuciones de tensión momentáneas. iv. Neutralizadores de fallas a tierra (bobinas Peterson). 2) Características para la desconexión rápida de los elementos defectuosos: i. Protección por relevadores. ii. Interruptores con suficiente capacidad interruptiva. 6 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” iii. Fusibles. 3) Características que reducen la pérdida del elemento defectuoso: i. Circuitos paralelos. ii. Capacidad de reserva de generadores y transformadores. iii. Recierre automático. 4) Características presentes en todo el periodo, desde que inicia la falla hasta que se elimina, para mantener la tensión y la estabilidad. i. Regulación automática de la tensión. ii. Características de estabilidad de los generadores. 5) Medios para observar la eficacia de las características anteriores. i. Oscilógrafos automáticos. ii. Observación humana eficiente y registro de datos. 6) Inspecciones frecuentes a medida que cambia el sistema o adiciones que se hagan para estar seguro de que las características anteriores son aun adecuadas. La protección por relevadores es una de las características importantes del diseño de un sistema relacionado con la disminución del daño al equipo y con interrupciones al servicio cuando se presentan fallas en el sistema de potencia. Aun cuando es muy importante la economía en el diseño de un sistema eléctrico de potencia, también debe existir la certeza de que el sistema está adecuadamente protegido. 1.2 Función de la protección por relevadores. La función de la protección por relevadores es originar el retiro rápido del servicio de cualquier elemento de un sistema de potencia, cuando se presenta una falla o cuando se presenta un funcionamiento anormal que pueda ocasionar un daño o interfiera de otra forma con el funcionamiento eficaz del resto del sistema. Las protecciones actúan sobre interruptores, que son los que desconectan al elemento defectuoso cuando el equipo de protección les manda la señal. Los interruptores se localizan de tal manera de que cada elemento (transformador, línea de transmisión, generador, etc.) pueda aislarse por completo del resto del sistema. Estos interruptores deben tener la capacidad suficiente para conducir corrientes máximas de cortocircuito de manera momentánea y además poder interrumpir dicha corriente; deben soportar también el cierre de un cortocircuito semejante e interrumpirlo de acuerdo con normas establecidas. La función principal de los relevadores es la de reducir los efectos de los cortocircuitos, una función secundaria de la protección por relevadores es indicar el lugar donde se presenta la falla, además de indicar que tipo de falla se presenta. Estos datos ayudan en la reparación oportuna; también 7 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” proporcionan medios para el análisis de la eficacia de la prevención de la falla y las características de disminución que incluye la protección por relevadores. 1.3 Principios fundamentales de la protección por relevadores. La filosofía general para aplicar la protección por relevadores consiste en dividir todo el sistema eléctrico de potencia en zonas de protección a las cuales los relevadores las puedan proteger de manera eficiente, con una mínima cantidad de interrupciones del suministro eléctrico. En la Figura 1.1 se puede observar un sistema eléctrico de potencia dividido en zonas: 1. 2. 3. 4. 5. Generadores o unidades tipo generador-transformador. Transformadores. Barras. Líneas de transmisión. Motores. Figura 1.1. Diagrama de la zonas de protección en un sistema eléctrico de potencia. Las zonas de protección están traslapadas para evitar la posibilidad de áreas sin protección. El traslape se logra conectando los relevadores a los transformadores de corriente como se muestra en la figura 1.2. Cualquier anomalía en la pequeña área entre los transformadores de corriente se detecta por la protección de ambas zonas y dispara todos los interruptores de las dos zonas. Considerando en un principio un equipo de protección solo contra cortocircuitos. Existen dos grupos de dichos equipos: el primero llamado protección primaria, y el segundo protección de respaldo. Es obvio que la confiabilidad es de vital importancia en un sistema de protección, sin embargo existen muchos factores que pueden afectarla 8 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” recordando que también el interruptor pude llegar a fallar. Por estas razones se usan zonas de protección primaria y de respaldo para garantizar el libramiento de una falla bajo cualquier situación. Figura 1.2. Zonas de protección traslapadas. La protección primaria como su nombre lo dice es la primera en actuar cuando se presenta una falla, debe ser capaz de librarla en el menor tiempo posible y también debe abrir únicamente los interruptores del circuito donde se presentó la falla. En cuanto a la protección de respaldo es generalmente más pausada comparándola con la protección primaria. La protección de respaldo debe operar cuando la protección primaria no opera, por cualquier circunstancia; de modo que actúa como respaldo local. Otro caso es cuando no abra el interruptor de un circuito con falla en una subestación lejana; entonces actúa como protección de respaldo remota. Generalmente la protección de respaldo solo se emplea para protección de cortocircuitos. La experiencia ha mostrado que la protección de respaldo no es justificable económicamente para casos distintos de los cortocircuitos. Se debe mencionar también que cuando la protección primaria está fuera de servicio por reparación o por mantenimiento, la protección de respaldo actuará como protección primaria. La protección por relevadores para los casos que no sean de cortocircuito se incluye en la protección primaria. Cada elemento del sistema se encuentra provisto de protecciones independientes que actuarán cuando se presente un funcionamiento anormal y abrirán interruptores para proteger a dicho elemento. Y la protección de respaldo para cortocircuitos va a funcionar cuando ocurran otras condiciones diferentes que produzcan tensiones o corrientes anormales. 9 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 1.3 Diagrama unifilar con varias LT en un sistema eléctrico de potencia. Analizando el diagrama de la Figura 1.3, simulando una falla en la línea 5-6, debe operar su protección primaria abriendo los interruptores 5 y 6. Si ésta llegara a fallar por cualquier circunstancia deberán operar las protecciones de respaldo local abriendo los interruptores 5 y 6 respectivamente. Si no llegara a operar el interruptor 5 deben operar las protecciones de respaldo remoto, es decir; en 1 y 2 respectivamente. En el caso de que fallara 6 deberá operar con respaldo remoto los interruptores 9 y 10. Si la falla llegara a ocurrir en las barras colectoras de la SE “3”, debe operar la protección primaria desconectando los interruptores 3, 4 y 5, en caso de que no opere la protección, deben operar con protección de disparo remoto los interruptores 1, 2 y 6, para librar la falla. 1.4 Características funcionales de la protección por relevadores. La aplicación de la protección por relevadores divide en forma muy estricta las partes del sistema de potencia, cada una con sus problemas particulares. Se debe tomar muy en cuenta la aplicación de cinco principios fundamentales para obtener un buen diseño y una protección eficaz, que se mencionan a continuación: i. Confiabilidad. Habilidad de la protección o conjunto de protecciones para operar correctamente cuando se requiere y evitar operaciones indebidas. Es un requisito básico que el equipo de protecciones sea confiable. Cuando la protección por relevadores no funciona adecuadamente, las características de reducción implicadas son muy inefectivas. Por lo tanto, es esencial que el equipo de protección por relevadores sea muy confiable y que la aplicación, mantenimiento e instalación aseguren que se aprovecharán al máximo. 10 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Los sistemas de protección deben funcionar correctamente bajo condiciones adversas del sistema y del medio que lo rodea. Deben operar en respuesta a disturbios en su área asignada o bloquear correctamente si el disturbio ocurre fuera de su área. La aplicación adecuada del equipo de protección por relevadores involucra una selección no solo del equipo de relevadores sino también de los aparatos asociados. ii. Velocidad. Librar la falla en el tiempo mínimo requerido y el menor daño al equipo. iii. Selectividad. Es la propiedad mediante la cual se aísla el elemento del sistema que se encuentra en falla, y las demás secciones se encuentran en condiciones normales (lograr máxima continuidad de servicio y mínima desconexión de circuitos). Se habla de una selectividad absoluta cuando la protección se acciona únicamente cuando ocurren fallas dentro de su zona, y se hace referencia a la selectividad relativa si se obtiene graduando los ajustes de las protecciones de las diversas zonas que puedan responder a una falla dada. iv. Simplicidad. Un sistema de protección se debe de diseñar de una manera muy simple, pero debe cumplir con sus propósitos de diseño (mínimo equipo y mínimo alambrado). v. Economía. Se busca tener la máxima protección al mínimo costo. Cuando se habla de un sistema de valor inicial bajo generalmente no es el más confiable, ya que presenta dificultades mayores cuando se instala y cuando se opera. Los relevadores de alta velocidad ofrecen mayor continuidad del servicio reduciendo los daños producidos por disturbios y daños al personal. Generalmente estos relevadores tienen un costo inicial alto, que no siempre se puede justificar, por lo tanto para la protección de los sistemas de potencia se hace una combinación de los relevadores de baja y alta velocidad ya que ambos tipos son muy confiables. La protección por relevadores se examina sobre la base primordial que es la contribución al mejoramiento del servicio de los consumidores, dentro de lo económicamente posible. La contribución de la protección por relevadores es ayudar al sistema de potencia, además de funcionar con mayor eficiencia y efectividad posible cuando ocurre una falla. Esto lo realiza el sistema de protección, en la siguiente forma: 11 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” A. Disminuyendo el daño al ocurrir una falla, reduciendo: i. El costo de la reparación. ii. La posibilidad de que la falla pueda extenderse e involucrar otros equipos. iii. El tiempo que el equipo está fuera de servicio. B. Reduciendo la cantidad de equipo de reserva: i. Con el restablecimiento oportuno del servicio. ii. Disminuyendo la probabilidad de otra falla, antes que la primera sea reparada. C. Permitiendo el uso más completo de la capacidad del sistema: i. Los relevadores de alta velocidad libran las fallas en tiempos más pequeños. ii. Evitando la pérdida de sincronismo del sistema de potencia. Para obtener una seguridad de operación cuando se requiera de la intervención de un relevador, además de la confiabilidad misma del instrumento se deben implementar programas de mantenimiento que los mantenga en buenas condiciones para tener la certeza de que en cualquier momento que ocurra una falla el relevador opere de forma eficiente y precisa, de acuerdo a la política de seguridad establecida para el sistema eléctrico de que se trate y ésta consiste en la justificación del costo de la protección incluyendo el capital, mano de obra y mantenimiento en función de la importancia del servicio que prestara el sistema eléctrico. 1.5 Principales características de los relevadores de protección. Un sistema de potencia no funcionaría sin la protección por relevadores, pero esto no lo hace apreciable. Como en toda buena ingeniería, la economía es de vital importancia. El ingeniero de protecciones puede justificar por lo general gastos para la protección por relevadores sobre la base de una práctica normalizada, las circunstancias pueden alterar dichos conceptos, y a menudo viene a ser necesario evaluar los beneficios que van a lograrse. Esta no es una cuestión por justificar la protección por relevadores, sino evaluar hasta donde es factible la inversión para obtener la mejor protección. Como todas las otras partes de un sistema de potencia, la protección por relevadores se evaluaría sobre la base del mejoramiento al servicio eléctrico, económicamente posible para los usuarios. La contribución de la protección por relevadores es ayudar al resto del sistema de potencia a funcionar con la mayor efectividad y eficiencia posible ante la falla. Todo esto lo hace la protección por relevadores disminuyendo el daño cuando se presentan las fallas, la protección por relevadores disminuye: 1. El costo de la reparación del daño. 2. La probabilidad de que la falla pueda extenderse e involucrar otro equipo. 12 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” 3. El tiempo que el equipo está fuera de servicio. 4. La pérdida en ingreso y la tirantez de las relaciones públicas mientras el equipo está fuera de servicio. La calidad del equipo de protección por relevadores afecta a los gastos de ingeniería al aplicar el equipo de protección mismo. El gasto justificable para un equipo dado de protección por relevadores es necesariamente proporcional al valor o importancia del elemento de un sistema que va a ser protegido de un modo directo. Una falla en ese elemento de sistema puede afectar la capacidad para dar servicio del sistema completo y, por lo tanto, ese equipo de protección está protegiendo realmente el servicio del sistema completo. Algunos de los paros más serios han sido ocasionados por los efectos que provienen de una falla original en equipo de relativa importancia que no se protegió de manera adecuada. Todos los relevadores utilizados para la protección de cortocircuitos y muchos otros tipos, también funcionan en virtud de la corriente y/o tensión proporcionada a éstos por los transformadores de instrumentos (corriente y tensión) conectados en diversas combinaciones al elemento del sistema que va a protegerse. Por cambios ya sean individuales o relativos en estas dos magnitudes las fallas señalan su presencia, tipo, y localización a los relevadores de protección. Para cada tipo y localización de falla, existe alguna diferencia característica en estas magnitudes así como varios tipos de equipos de protección por relevadores disponibles, cada uno de los cuales está diseñado para reconocer una diferencia particular y funcionan en respuesta a ésta. Existen más diferencias posibles en estas magnitudes de las que uno pueda sospechar. Las diferencias en cada magnitud son posibles en una o más de las que siguen: i. ii. iii. iv. v. vi. vii. Magnitud Frecuencia. Ángulo de fase. Duración. Razón de cambio. Dirección u orden de cambio. Armónicas o forma de onda. De modo que, cuando corriente y tensión son considerados en combinación, o relativas a magnitudes similares en diferentes localidades, uno puede empezar a darse cuenta de los medios disponibles para propósitos de discriminación. Esta es una circunstancia afortunada que, aunque la naturaleza ha impuesto en su forma contraria la precisión de la falla de un sistema eléctrico de potencia, nos ha provisto al mismo tiempo con un medio para combatirla. 13 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CAPÍTULO II Características y fundamentos de la operación de los diferentes tipos de relevadores de protección. 2.1 Clasificación de los relevadores. La clasificación de los relevadores tomando en cuenta sus características constructivas, los cuales pueden ser: A. Relevadores electromagnéticos. Se basan en la fuerza de atracción ejercida entre pieza de material magnético y son accionados por una señal de corriente. B. Relevadores de inducción. Estos relevadores tienen muchas aplicaciones y su principio de funcionamiento es el mismo que el de los motores de inducción, los cuales utilizan el sistema de estructura electromagnética. Son accionados por una señal de corriente. C. Relevadores electrónicos. Estos relevadores funcionan por medio de diodos, tiristores, transistores, etc. Su principal característica es que son de mayor velocidad de operación. Su funcionamiento es equivalente al de los relevadores electromagnéticos. D. Relevadores térmicos. Estos relevadores operan dejando fuera de servicio al equipo o máquina que protegen, y el cual ha sido sometido a sobrecarga o a falla. Estos efectos producen calentamiento excesivo elevando la temperatura de los devanados. Estos relevadores son muy utilizados en transformadores de mediana y de gran potencia. Estos relevadores generalmente toman en cuenta la imagen térmica del equipo que protege, es decir; de un dispositivo cuya ley de calentamiento sea análoga a la ley del objeto protegido. Tienen tres contactos los cuales cierran a diferentes temperaturas. Uno de tales contactos sirve para el control de abanicos otro para evitar una señal de alarma y el último para enviar una señal de disparo dejando fuera el equipo que se protege. Varios dispositivos incluyendo los relevadores, han sido provistos de identificación, de su operación con números y algunas veces con sufijos de letras apropiadas para uso de esquemas y diagramas de alambrado. Estos fueron introducidos por NEMA y ahora adoptados como norma estándar para sistemas de interrupción automática por la AIEE. Son como se presentan enseguida, haciendo mención de solo aquellos de relevante importancia: No. De Disp. Definición y función 12 SOBRE-VELOCIDAD: Es generalmente un switch de velocidad conectado directamente y que funciona al sobrepasar de un valor determinado la velocidad de una máquina. 13 VELOCIDAD SINCRÓNICA: Tal como un switch centrífugo de velocidad, un relé de voltaje, un relé de baja corriente o 14 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” cualquier tipo de dispositivo, opera aproximadamente a la velocidad sincrónica de la máquina. 14 BAJA VELOCIDAD: Funciona cuando la velocidad de una máquina cae por debajo de un valor predeterminado. 15 DISPOSITIVO QUE EMPAREJA LA VELOCIDAD O FRECUENCIA: Iguala y mantiene la velocidad o la frecuencia de una máquina o de un sistema igual o aproximadamente igual al de la otra máquina, fuente o sistema. 21 RELÉ DE DISTANCIA: Funciona cuando la admitancia, impedancia o reactancia de un circuito, aumenta o disminuye más allá de los límites predeterminados. 23 CONTROL DE TEMPERATURA: Funciona al elevar o bajar la temperatura de una máquina u otro aparato, cuando excede o baja un valor predeterminado. 25 SINCRONISMO: Opera cuando dos circuitos están dentro de límites deseados de frecuencia, ángulo de fase o voltaje para permitir o hacer el emparalelamiento de esos dos circuitos. 27 RELÉ DE BAJO VOLTAJE: Funciona a un cierto valor de bajo voltaje. 32 RELÉ DIRECCIONAL DE POTENCIA: Funciona en valor deseado de flujo de potencia en una dirección dada o porque se invierte la potencia como resultado de invertir el ánodo-cátodo de un rectificador de potencia. 37 RELÉ DE BAJA-CORRIENTE O BAJA-POTENCIA: Dispositivo que funciona cuando la corriente o flujo de potencia disminuye a menos de un valor predeterminado. 40 RELÉ DE CAMPO: Opera a un dado o bajo valor anormal o pérdida de la corriente de campo de una máquina o a un excesivo valor del componente reactivo de la corriente de armadura en máquinas de CA, que indican la excitación anormal baja del campo. 46 RELÉ DE CORRIENTE, INVERSION DE FASE, O BALANCE DE FASE: Funciona cuando las corrientes polifásicas son de secuencia inversa de fase, o cuando las corrientes se desbalancean o contienen componentes de secuencia de fase negativa, sobre una cantidad dada. 49 RELÉ TÉRMICO DE MÁQUINA O TRANSFORMADOR: Funciona cuando la temperatura de armadura de una máquina 15 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” de CA u otra carga que tiene devanado o elemento de máquina de CD, convertidor o rectificador de potencia (incluyendo un transformador rectificador de potencia) excede a un valor predeterminado. 50 RELÉ DE SOBRECORRIENTE INSTANTÁNEO: Funciona instantáneamente a un excesivo valor de corriente o a una excesiva relación de aumento de corriente, de este modo indicando una falla en el aparato o circuito que protege. 51 RELÉ DE SOBRECORRIENTE DE TIEMPO CA: Es un dispositivo con una característica de tiempo definida o inversa que funciona cuando la corriente en un circuito excede de un valor predeterminado. 52 INTERRUPTOR DE CA: Dispositivo que se usa para cerrar e interrumpir un circuito de potencia bajo condiciones normales o para interrumpir este circuito bajo condiciones de falla o de emergencia. 53 RELÉ EXCITADOR DE CD: Dispositivo que obliga la excitación del campo de la máquina de CD reforzándola durante el encendido o que funciona cuando el voltaje de la máquina ha alcanzado un valor dado. 54 INTERRUPTOR DE ALTA VELOCIDAD: Es un interruptor que funciona para reducir la corriente al inicio en el circuito principal en 0.01 segundos o menos, después de ocurrir la sobrecorriente CD o relación excesiva de alza corriente. 55 RELÉ DE FACTOR DE POTENCIA: Opera cuando el factor de potencia en un circuito de CA aumenta o disminuye más de un valor predeterminado. 56 RELÉ DE APLICACIÓN DE CAMPO: Es un dispositivo que controla automáticamente la aplicación de la excitación del campo a un motor de CA a un punto predeterminado en el lapso de ciclo. 59 RELÉ DE SOBREVOLTAJE: Es un dispositivo que funciona a un cierto valor dado de sobrevoltaje. 60 RELÉ DE BALANCE DE VOLTAJE: Dispositivo el cual opera a una diferencia dada en voltaje entre dos circuitos. 61 RELÉ DE BALANCE DE CORRIENTE: Dispositivo que opera a una diferencia dada de entrada o salida de corriente de dos circuitos. 16 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” 62 RELÉ DE RETARDO DE TIEMPO DE PARAR O ABRIR: Es un dispositivo retardador de tiempo que sirve en conjunción con el aparato que inicia la operación del cierre, paro o apertura en una secuencia automática. 63 RELÉ DE PRESIÓN, FLUJO O NIVEL DE GAS Ó LÍQUIDO: Es un aparato que opera en un dado valor de presión flujo o nivel de gas o liquido o a una relación dada de cambios de estos valores. 64 RELÉ PROTECTOR DE TIERRA: Funciona en fallas del aislamiento de una máquina, transformador o de otro aparato que tenga conexión a tierra. NOTA: esta función es asignada solamente a un relé que detecta el flujo de corriente de la armazón de una máquina o cubierta, estructura o una pieza de un aparato a tierra en un circuito o devanado normalmente no conectado a tierra. No se aplica a un dispositivo conectado en el circuito secundario o neutro secundario de un transformador de corriente o transformadores de corriente, conectados en el circuito de potencia de un sistema normalmente aterrizado. 67 RELÉ DIRECCIONAL DE SOBRECORRIENTE CA: Funciona a un valor deseado de sobrecorriente fluyendo en una dirección predeterminada. 72 INTERRUPTOR CD: Se usa para cerrar e interrumpir un circuito de potencia bajo condiciones normales o para interrumpir este circuito bajo condiciones de falla, emergencia o peligro. 74 RELÉ DE ALARMA: Este dispositivo es diferente al relé anunciador (con No. 30), y que se usa para operar en conexión con una alarma visual o auditiva. 76 RELÉ DE SOBRECORRIENTE CD: Aparato el cual funciona cuando la corriente excede a un valor dado. 78 RELÉ MEDIDOR DE ÁNGULO DE FASE O DE DESBALANCE: Es un dispositivo que funciona a un valor predeterminado de ángulo entre dos voltajes, dos corrientes o entre voltaje y corriente. 81 RELÉ DE FRECUENCIA: Dispositivo que funciona a un predeterminado valor de frecuencia ya sea por arriba o por abajo o a la frecuencia normal del sistema o relación de cambio de frecuencia. 84 MECANISMO DE OPERACIÓN: Es el mecanismo eléctrico completo o servomecanismo, incluyendo el motor de operación, solenoides, posición de los switches, etc. Para un cambio disponible, regulador de inducción, o cualquier pieza de aparato 17 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” que no tenga número de función de aparato. 85 RELÉ RECEPTOR DE MENSAJE O DE CONDUCTORPILOTO: Aparato el cual es operado o controlado por una señal usada en conexión con la corriente mensajera o conductor piloto de CD en una falla de relevamiento direccional. 86 RELÉ DE eléctricamente funciona para mantenerlo así 87 RELÉ DE PROTECCIÓN DIFERENCIAL: Dispositivo el cual funciona a un porcentaje, ángulo de fase u otra diferencia cuantitativa de dos corrientes o algunas otras cantidades eléctricas. 90 DISPOSITIVO REGULADOR: Funciona para regular una cantidad o cantidades, tales como: voltaje, corriente, potencia, velocidad, frecuencia, temperatura y carga a un cierto valor o valores entre ciertos límites para máquinas, líneas enlazadas u otros aparatos. 91 RELÉ DIRECCIONAL DE VOLTAJE: Dispositivo el cual opera cuando el voltaje a través de un interruptor abierto o contactor excede en un valor dado en una dirección dada. 92 RELÉ DIRECCIONAL DE VOLTAJE Y POTENCIA: Aparato que permite o causa la conexión de dos circuitos cuando la diferencia de voltajes entre ellos excede a un valor dado en una dirección predeterminada y causa que estos dos circuitos se desconecten el uno del otro cuando el flujo de potencia entre ellos exceda a un valor dado en la dirección opuesta. CIERRE FORZADO: Dispositivo operado que se reajusta manual o eléctricamente que suspender el funcionamiento de un equipo y al presentarse condiciones anormales. 2.2 Principio de funcionamiento. Los relevadores de protección para sistemas de potencia, están formados por una o más unidades de decisión o detectores de fallas, además de los circuitos lógicos y unidades auxiliares que necesiten. Debido a que varios de estos detectores de fallas se usan en diferentes relevadores, son llamados unidades básicas. El principio de funcionamiento de todos los relevadores considerados es función de una respuesta a una o más magnitudes eléctricas, ya sea para abrir o cerrar contactos. Existen dos principios fundamentales de funcionamiento diferentes de los relevadores que son: i. Atracción electromagnética. 18 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” ii. Inducción electromagnética. Los de atracción electromagnética emplean un embolo que es atraído dentro de un solenoide, o una armadura que es atraída por los polos de un electroimán, estos relevadores pueden ser accionados por corriente alterna o por corriente directa. Los relevadores de tipo inducción electromagnética funcionan en forma análoga al motor de inducción, por este motivo el par se obtiene mediante la inducción en el rotor. Estos relevadores solo son accionados por corriente alterna. De acuerdo a su tipo de estructura se tiene que las cinco primeras utilizan el principio de atracción electromagnética, mientras las siguientes usan el de inducción electromagnética. Las estructuras iv, vii, viii, ix y x son direccionales y las correspondientes a v y xi son diferenciales. i. ii. iii. iv. v. vi. vii. viii. ix. x. xi. Atracción de Armadura (Abisagrada). Atracción de Armadura (Pivotada). Núcleo de Succión. Direccional de Atracción Electromagnética. Diferencial de Atracción Electromagnética. Polo sombreado. Vatihorimétrica. Cilindro de Inducción. Anillo de Inducción Doble. Anillo de inducción Sencillo. Diferencial de Inducción Figura 2.1 (i) Atracción de Armadura (Abisagrada); (ii) Atracción de Armadura (Pivotada). Figura 2.2 (iii) Núcleo de Succión; (iv) Direccional de Atracción Electromagnética. 19 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 2.3 (v) Diferencial de Atracción Electromagnética; (vi) Polo sombreado. Figura 2.4 (vii) Vatihorimétrica; (viii) Cilindro de Inducción. Figura 2.5 (ix) Anillo de Inducción Doble; (x) Anillo de inducción Sencillo. 20 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 2.6 (xi) Diferencial de Inducción. En relación con los contactos, estos pueden ser normalmente abiertos o normalmente cerrados. Se entiende por condiciones normales cuando el relevador no opera, es decir; está fuera de servicio y precisamente la posición que adopten dichos contactos en estas circunstancias será lo que los defina como normalmente abiertos (NA) o normalmente cerrados (NC). El símbolo para designar contactos NA o NC se muestran en la figura: Figura 2.7 Símbolos de los contactos. Para tener una mejor comprensión de los contactos se hacen las siguientes definiciones: Valor de puesta en trabajo: es el valor mínimo de la magnitud de influencia que logra abrir o cerrar los contactos del relevador. Valor de reposición: es cuando la magnitud de influencia disminuye y los contactos retornan a su condición normal. Valor de paso al reposo: es cuando un relevador funciona para abrir un contacto pero no se repone, se dice que este pasa al reposo y el valor máximo de la magnitud de influencia a la que esto ocurre se llama valor de paso al reposo. Indicadores de funcionamiento o indicadores: son elementos de cierto color que son accionados por el mecanismo del relevador, o eléctricamente por flujo de la corriente de contacto y salen a la vista cuando funciona el relevador. Bobinas de sello y de retención: para la protección de los contactos del deterioro y evitar falsos contactos, algunos relevadores están provistos de una pequeña bobina conectada serie con los contactos, ésta se localiza sobre un 21 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” electroimán que actúa sobre la armadura en el conjunto móvil del contacto, de esta forma una vez que se establece el flujo de corriente de la bobina de disparo, los contactos se mantendrán herméticamente cerrados. Esta descripción corresponde a lo que se conoce como bobina de sello, pues otros relevadores emplean precisamente otro pequeño relevador cuyos contactos están en derivación con los del relevador de protección para mantener cerrado el circuito mientras fluya la corriente de disparo. Este relevador es conocido como relevador de contactos de sello o de retención. Ajuste de puesta en trabajo o de reposición: aquí se utilizan bobinas de corriente o bobinas de potencial, en ambos casos deberán tener tomas o resistencias o bien el ajuste se logrará por un resorte ajustable o por la variación del entrehierro con respecto a su solenoide o electroimán. Las figuras 2.8 y 2.9 complementan la idea para comprender de mejor maner a la operación, el control, su disposición, etc.; en cuanto a los contactos de un relevador. Figura 2.8 Alternativas de los métodos de contactos de sello. Figura 2.9 Curvas de tiempo de funcionamiento contra el valor de la magnitud de influencia. 22 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Continuando con el análisis correspondiente para los distintos tipos de relevadores, vemos el principio de funcionamiento del relevador de una sola magnitud de atracción electromagnética. La fuerza que se desarrolla sobre el elemento móvil es proporcional al cuadrado del flujo en el entrehierro. Despreciando el efecto de saturación, la fuerza total es: F K1 I 2 K 2 F Fuerza neta. K1 Constante de conversión de la fuerza. I Corriente eficaz en la bobina. K 2 Fuerza de retención. Cuando el relevador está en el límite de la puesta en trabajo, la fuerza neta es cero, entonces la característica de funcionamiento es: K1 I 2 K 2 o bién; I K2 K1 Una característica que afecta la aplicación de algunos de estos relevadores es la diferencia relativamente grande entre sus valores de puesta en trabajo y de reposición. El problema es menor en relevadores de CA que en CD, donde es entre 90 a 95%, en cambio, en CD se habla de un 60 a 90%, para aplicaciones en sobrecorriente, el relevador dispara un interruptor que reduce la corriente a cero, y por esto el valor de reposición no es de consecuencia. Otra anomalía que representan estos relevadores es la tendencia a la vibración sobre todo en CA, una mejoría se consigue si las piezas polares tienen anillos de sombra que dividan el flujo del entrehierro en dos componentes fuera de fase, así disminuye la tendencia a reponer cada medio ciclo, cuando el flujo pasa por cero. Estos relevadores no se recomiendan en control direccional, como son de respuesta rápida son afectados por los transitorios y particularmente por la CD descentrada en ondas de CA. El relevador se podrá poner en trabajo durante un transitorio dependiendo de la cantidad de descentrado, su constante de tiempo y de su velocidad. Esta tendencia se conoce como “sobrealcance”. Estos relevadores son de funcionamiento rápido, y son recomendables cuando no se desea retardo, si éste fuera necesario se obtendría, mediante fuelles, amortiguadores, escapes, etc. Si la acción retardada es muy corta, ésta se obtendría con relevadores de CD rodeando al circuito magnético con un anillo 23 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” de baja resistencia o slug, que aumenta o disminuye el entrehierro según se desea. 2.3 Relevadores direccionales del tipo de atracción electromagnética. Los relevadores direccionales del tipo de atracción electromagnética funcionan con CD o CA rectificada. El uso más común es en protección de circuitos de CD, donde la magnitud de influencia se obtiene de una resistencia en derivación o directamente del circuito. La figura 2.10 es un esquema de un relevador direccional de atracción electromagnética. Figura 2.10 Relevador direccional de atracción electromagnética. La armadura móvil magnetizada por la corriente que fluye en la bobina actuante alrededor de la armadura, y con tal polaridad como para cerrar contactos. Un cambio de polaridad de la magnitud de influencia invertirá las polaridades magnéticas de los extremos de la armadura que ocasionará la apertura de contactos. En la misma figura 2.10 se ve entre la sección X y Y una bobina polarizadora la cual, en ocasiones es remplazada por un imán permanente. Un análisis de la fuerza que hace mover la armadura será el siguiente, despreciando la saturación: F K1 I p I a 24 K2 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Cuando el relevador está en el límite de funcionamiento: I pIa K2 K1 cte. Este relevador se denomina direccional precisamente por la capacidad que tiene de distinguir entre dos direcciones opuestas de la c orriente de la bobina actuante o entre polaridades opuestas. Con un imán permanente de polarización o con la bobina polarizadora activada por una corriente constante, la característica de funcionamiento es: Ia K2 K1 I p cte. Se exige para I a un valor para la puesta en trabajo, así como una polaridad correcta. Este relevador es más eficiente que los de armadura articulada o solenoide, por la energía requerida del circuito de la bobina actuante. Por esta razón estos relevadores se emplean cuando la fuente es una resistencia en derivación de CD. Otra opción para operar este relevador es el uso de CA rectificada de onda completa, esto sería un relevador de CA de baja energía. Los relevadores direccionales son instantáneos, pero un retardo corto se logra con un slug colocado alrededor de la armadura. Por la elevada relación de corriente continua o capacidad de tensión al valor de puesta en trabajo, se tendrán calentamientos con el consiguiente aumento de la eficiencia. 2.4 Relevadores de inducción de una sola magnitud. Los relevadores del tipo de inducción son los más ampliamente utilizados en la protección por relevadores, utilizan exclusivamente CA por el principio de funcionamiento. Estos relevadores son motores de inducción de fas e auxiliar provistos de contactos. La fuerza actuante se desarrolla en un elemento móvil, ya sea un disco o bien otra forma de rotor de material no magnético que sea conductor de corriente, para eliminar el efecto de las corrientes parásitas de Foucault. 25 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” En la figura las corrientes fluyen en el rotor por la influencia de las dos tensiones. La corriente producida por un flujo reacciona con el otro, y viceversa, de este modo se dá lugar a la fuerza actuante sobre el rotor. La figura 2.11 se ilustra cómo se produce la fuerza actuante sobre el rotor. Figura 2.11 Producción del par en un relevador de inducción. 1 1 sen t; donde 1 es el flujo máximo. Así mismo 2 2 sen( t ) Siendo θ el ángulo de fase entre los flujos 1 y 2 . Para evitarse el considerar la autoinducción de las corrientes creadas en la placa y también el ángulo de fase de estas con respecto a sus fuerzas electromotrices que por lo demás son despreciables, se puede establecer que las corrientes son proporcionales a las derivadas del flujo con respecto al tiempo, según las expresiones siguientes: i 1 i 2 d 1 dt d 2 dt 1 cos t cos( t 2 ) Como se puede observar en la figura las fuerzas F1 y F2 se encuentran en oposición y la resultante será la diferencia de ellas: F ( F2 - F1 ) ( 2i 1 1 i 2) Sustituyendo los valores de los flujos en esta ecuación tenemos: F 1 2 sen La ecuación anterior nos indica que la fuerza es constante en todo momento dependiendo únicamente de los valores máximos de los flujos y el ángulo de fase entre ellos. 26 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” En los relevadores de inducción de acuerdo con su estructura de funcionamiento, hay una clasificación como sigue: de polo sombreado, tipo Wattorímetro tipo de tambor o copa de inducción y de anillo sencillo. En el relevador de polos sombreados el flujo principal se divide en dos flujos desfasados. El relevador de tipo Wattorímetro contiene dos bobinas separadas, cada una de ellas produce un flujo que creará la fuerza neta para mover el rotor que es un disco. Los relevadores tipo tambor o copa de inducción y el de anillo de inducción, son parecidos a los motores de inducción, solo que aquí el hierro del rotor está estacionario y el tambor que es un cilindro hueco es el que gira, la misma operación se desarrolla si la parte que gira es uno o dos anillos. El relevador tipo polos sombreados es un ejemplo de éstos. También los otros relevadores de inducción pueden ser utilizados con una sola magnitud de influencia, conectando sus circuitos actuantes en serie o paralelo, el defasamiento entre los flujos está en función de la relación X/R que será distinta para cada circuito. En la siguiente figura se muestra en forma esquemática la construcción del relevador de inducción. Figura 2.12 Relevador de inducción tipo de polos sombreados. Si se desprecia el efecto de saturación el par de estos relevadores es: T K1 I 2 K2 T K 1V 2 K2 si el relevador es de corriente. si el relevador es de voltaje. En estos relevadores el par es controlado por un contacto en serie con uno de los circuitos si éstos están en paralelo o en serie con una parte del circuito si éstos están en serie. Un relevador se diseña para tener la puesta en trabajo más baja a su frecuencia nominal. El efecto de ligeros cambios en la frecuencia, en los sistemas de potencia, puede despreciarse, pero una forma distorsionada de la onda puede alterar la característica de puesta en trabajo y tiempo. 27 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” En general, la puesta en trabajo de los relevadores de alta velocidad, es tan alta que de esta forma compensa cualquier tendencia al sobrealcance. La relación de reposición a puesta en trabajo está entre 95% y 100% y son la fricción y compensación imperfecta del resorte de control del par, las únicas cosas que hacen que la relación sea del 100%. Además, la relación no se afectará por el ajuste de la puesta en trabajo, donde las bobinas de corriente con tomas, proporcionan el ajuste de la puesta en trabajo. Cuando se necesita el recierre rápido automático de un interruptor, el tiempo de reposición de un relevador de tiempo inverso, puede ser una característica crítica para su selección. Si todos los relevadores involucrados no tienen tiempo de reposición rápida, después que se dispara un interruptor, y antes que este recierre, y si el otro que originó el disparo se restablece cuando cierra el interruptor, algunos relevadores pueden funcionar muy rápido y disparar sin necesidad. Las curvas de tiempo inverso se obtienen con relevadores cuyo rotor en un disco y estructura de polo sombreado o del tipo Wattorímetro. El funcionamiento de alta velocidad se obtiene con las estructuras de tambor de inducción o de anillo de inducción. 2.5 Relevadores de inducción direccionales. El relevador direccional es de tipo de inducción y solamente toma en cuenta en qué dirección se encuentra la falla. Por lo que cierra sus contactos solamente cuando la energía circula en un sentido determinado. Debido a la característica direccional este relevador tiene la característica principal de funcionamiento de ser selectivo, o sea que se desconecta solamente de la línea que ha fallado. Sus contactos cierran o abren según sea el ángulo formado por los vectores representativos de la corriente y la tensión. La señal de corriente y de tensión que se suministran a cada relevador direccional, no debe ser de una misma fase ya que al producirse una falla en tal fase la tensión y el factor de potencia caen a valores muy bajos lo cual dificulta el funcionamiento del relevador. Por esta razón se aplica a cada relevador una tensión entre fases. La señal de corriente que reciben estos relevadores al igual que todos los demás que necesiten de esta señal para su funcionamiento, viene de los transformadores de corriente, los cuales generalmente vienen montados en la parte interior de los interruptores, transformadores de potencia, etc. Vienen uno o dos por fase, tanto para protección como para medición. La señal de tensión la reciben de los transformadores de potencial los cuales generalmente se colocan en la subestación conectándose del bus principal. Al igual que todos aquellos relevadores que necesitan de esta señal para su funcionamiento. 28 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” La protección direccional se utiliza donde existen dos o más tramos de línea, así pues los dos extremos de la línea deben de estar provistos de relevadores direccionales de protección los cuales deben operar solamente cuando el defecto está en dirección de la línea. En la actualidad los relevadores direccionales cierran sus contactos según sea el sentido de la energía independientemente de la magnitud de la potencia y de la corriente aunque ésta debe de excederse de un límite. Existen varios tipos de relevadores direccionales en general cada uno de ellos contienen los siguientes elementos: i. ii. iii. iv. Unidad o unidades direccionales. Unidades de sobrecorriente. Unidad de sello. Unidad instantánea. Estos relevadores contienen también un mecanismo defasador. La unidad direccional es un producto que se realiza en la unidad de operación la cual es del tipo cilindro de inducción sobre el cual interacciona entre el circuito del flujo de polarización y el circuito del flujo de operación. Mecánicamente la unidad direccional está compuesta de cuatro componentes básicos: 1. 2. 3. 4. Marco de aluminio de forma de cuña fundida. Marco electromagnético. Elemento móvil. Puente moldeado. El marco sirve como estructura de montaje para el núcleo magnético, además tiene dos bobinas de polarización conectadas en serie y montadas diametralmente opuestas una de otra; dos bobinas de operación conectadas en serie y montadas diametralmente una de la otra. El elemento móvil consiste de un resorte en espiral, de un contacto móvil y de un cilindro de aluminio montado sobre una pequeña flecha. Los topes del elemento móvil o contacto móvil son una parte integral del puente el cual está fijo al marco electromagnético. Este puente es usado para el montaje del ajuste del contacto estacionario. Con los contactos fijo y móvil se logra hacer la conexión eléctrica y así poder mandar una señal de disparo al interrumpir del tramo de línea protegido, al ocurrir una falla en tal tramo siempre y cuando se cierren tales contactos cuando el relevador direccional opere satisfactoriamente. Los contactos de la unidad direccional son conectados en serie con la bobina de polos sombreados de la unidad de sobrecorriente, dándole control 29 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” direccional a la unidad de sobrecorriente. Este arreglo evita que el relevador opere para fallas en la dirección de no disparo. Partes del relevador direccional más importantes: Figura 2.13 Relevador direccional sin caja, mostrando sus partes más importantes. 1. Unidad direccional. 2. Unidad de sobrecorriente. 3. Unidad de sello. Figura 2.14 Relevador direccional. 1. 2. 3. 4. 5. 6. 7. Contacto estacionario. Resorte de presión (para presionar al contacto estacionario). Plugs. Ajuste magnético. Tornillo de ajuste magnético. Conjunto de elemento móvil. Prensa para el ajuste del resorte. Vía oblicua de corriente. 30 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Partes de la unidad de sobrecorriente de tiempo: Figura 2.15 Relevador de sobrecorriente, mostrando sus partes más importantes. 1. 2. 3. 4. 5. 6. 7. Block de Tap´s. Dial de tiempo. Conjunto del resorte de control. Disco. Conjunto de contacto estacionario. Plugs magnéticos. Imán permanente. Figura 2.16 Indicating Contactor Switch (ISC). Las características de tiempo de los relevadores direccionales de sobrecorriente son de tiempo corto, de tiempo largo, inverso de tiempo muy inverso, y de tiempo extremadamente inverso. Esto también se verá con más detalle en el capítulo 4. Puesto que se verá por medio de figuras, las cuales mostrarán las curvas de tiempo para las diferentes palancas o ajustes de dial. Estas figuras mostrarán las características de tiempo al cual los contactos cierran para un determinado ajuste de palanca y un determinado valor de corriente en múltiplos del TAP de corrientes aplicado al relevador. 31 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 2.17 Diagrama vectorial para el par máximo en un relevador direccional el cual funciona con las magnitudes de tensión y corriente, el relevador es de tipo de inducción. Los relevadores direccionales se utilizan para la protección de algún tramo de línea y cuando la falla ocurre en las fases, pero también se utiliza para cuando la falla que ocurre es a tierra. En la figura 2.17 se puede observar el diagrama vectorial para el par máximo en un relevador direccional. Según las magnitudes de influencia para el funcionamiento de los relevadores direccionales, el par es estrictamente: T K1VI cos( ) K2 Donde: V La magnitud eficaz de la tensión aplicada a la bobina de tensión del circuito. I La magnitud eficaz de la corriente de la bobina de corriente. Ángulo entre I y V. El ángulo del par máximo. El valor de φ es del orden de 60° a 70° de atraso para la mayoría de las bobinas de tensión y por lo tanto, será del orden de 20° a 30° de adelanto si no hay impedancia en serie con la bobina de tensión. Con la inserción en el circuito del relevador de una combinación de resistencia y capacidad en serie con la bobina de tensión, podemos cambiar el ángulo entre la tensión aplicada e Iv a casi cualquier valor, ya sea atrasado o adelantado V sin cambiar la magnitud de Iv. Por lo mismo el ángulo de par máximo puede hacerse casi a cualquier valor deseado. En el punto de equilibrio, cuando el relevador está en el límite del funcionamiento, el par neto es cero, y tenemos: VI cos( ) K2 K1 cte. Esta característica de funcionamiento se muestra en la figura 2.18 mediante coordenadas polares. La magnitud polarizante, que es la tensión para este tipo 32 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” de relevadores es la distancia y la magnitud es constante. Por lo que se obtiene: I cos( ) cte. Cualquier vector de corriente cuya punta esté situada en el área del par positivo originará la puesta en trabajo del relevador; ésta no se pondrá en trabajo, para cualquier vector de corriente cuya punta está situada en el área del par negativo. Figura 2.18 Características de funcionamiento de un relevador direccional. Para una magnitud diferente de la tensión de referencia, la característica de funcionamiento será otra, nada más que paralela a la anterior o sea cuando la magnitud de la tensión era constante según la figura en cuestión y relacionada a ésta por la expresión. VI mín cte. Donde Imín, es la magnitud mínima de todos los vectores de corriente cuyas puntas finalizan en la característica de funcionamiento. , es conocida como la corriente mínima de puesta en trabajo del relevador aunque debe ser algo mayor para cumplir con su cometido. De este modo hay un número infinito de características de funcionamiento, una para cada magnitud posible de la tensión de referencia. Siempre se desea que el par máximo ocurra en algún valor de θ diferente de 90°, lo cual se logra poniendo en paralelo una resistencia o un capacitor con las bobinas principales. El efecto de los transitorios puede despreciarse con relevadores de tiempo inverso; pero con relevadores de alta velocidad tendrán que ser vigilados ciertos transitorios ya sea contra el diseño del relevador en su aplicación. En 33 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” general, un aumento de la puesta en trabajo, o la adición de uno o dos ciclos (60 hertz como base) de acción retardada evitará el funcionamiento indeseado. El efecto de ligeros cambios en la frecuencia como los encontrados normalmente, puede, no obstante, despreciarse. Si las frecuencias de las dos magnitudes proporcionadas al relevador son diferentes, se producirá un par senoidal alterno entre positivo y negativo; el par neto para cada ciclo del par será cero. Los relevadores del tipo de disco se utilizan donde se desean las características de tiempo inverso, y los relevadores de tambor o de anillo se utilizan para el funcionamiento de alta velocidad. Cuando se desea acción retardada, ésta se encuentra provista a menudo por otro relevador asociado con el relevador direccional. Todos los relevadores ya considerados son meramente combinaciones de los tipos que han sido descritos. Este punto podemos escribir la ecuación universal del par como sigue: T K1 I 2 K 2V 2 K 3VI cos( ) K4 Asignando signos más o menos a algunas de las constantes; haciendo cero las otras, y añadiendo algunas veces otros términos similares, pueden expresarse las características de funcionamiento de todos los tipos de relevadores de protección. 34 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CAPÍTULO III Transformadores de Instrumentos para el Accionamiento de los Relevadores. 3.1 Transformadores de corriente. En los sistemas eléctricos de potencia de medición de corriente alterna es una de las cosas más comunes, no solo por la medición misma, sino porque se requiere para determinar otros parámetros de los circuitos eléctricos ya que las señales de corriente y voltaje se requieren para: i. ii. iii. iv. Instrumentos indicadores y registradores. Medición de potencia y energía eléctrica. Telemedición. Alimentación de relevadores de protección. Cuando las corrientes por medir son relativamente pequeñas y los circuitos de baja tensión, la medición se puede hacer en forma directa, en cambio si los voltajes son grandes al igual que las corrientes, se debe tener una réplica de las corrientes y tensiones que se tienen en el circuito primario por medio del uso de transformadores de corriente y de potencial que son dispositivos que están diseñados para operar en su primario con las corrientes y tensiones nominales del circuito. De esta manera los transformadores de instrumentos son usados para: i. Proteger al personal y los aparatos del alto voltaje. ii. Permitir el uso de niveles de aislamientos razonables y capacidades de conducción de corriente en relevadores a una base común. Los transformadores de instrumentos y relevadores están estandarizados a 5 Amperes y/o 120 Volts, 60 ciclos. La dirección del flujo de corriente en los devanados del transformador no es importante cuando los relevadores operan sobre magnitud de corriente y voltaje, sin embargo; donde el relevador compara la suma o diferencia de dos corrientes, o las interacciones de varias corrientes o voltajes, es necesario conocer la polaridad del transformador. Como ya se comentó antes en lo referente a la medición de corrientes nominales grandes que no se pueden pasar directamente por los instrumentos de medición o protección, entonces es necesario establecer un aislamiento eléctrico entre el circuito primario conductor y los instrumentos de medición y protección; esto se logra al utilizar transformadores de corriente. La ecuación básica para los transformadores de corriente es la siguiente: 35 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” I 1 N1 I2 N2 También I1 I2 N2 N1 a Donde: Se designa por ZC la impedancia de carga; el voltaje que aparece en el secundario de un TC es función de otra impedancia de carga. V2 I 2 ZC Si se considera la impedancia interna Zi del TC entonces el voltaje secundario es: V2 (Z C Z i )I 2 En el transformador de corriente se deben considerar para su aplicación los errores de relación y de ángulo, mismo que aparecen en las denominadas clases de precisión de los TC´S. Para la aplicación de los transformadores de corriente se requieren conocer como parámetros los siguientes: i. ii. iii. iv. v. vi. vii. viii. ix. Corriente primaria. Corriente secundaria. Corriente de cortocircuito para efectos térmicos. Corriente de cortocircuito para efectos dinámicos. Potencia de salida del TC. Clase de precisión. Nivel básico de aislamiento. Número de devanados secundarios. Burden (Cargas). Los transformadores de corriente pueden ser de medición, de protección, mixtos o combinados. Transformador de medición. Los transformadores cuya función es medir, requieren reproducir fielmente la magnitud y el ángulo de fase de la corriente. Su precisión debe garantizarse desde una pequeña fracción de corriente 36 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” nominal del orden del 10%, hasta un exceso de corriente del orden del 20%, sobre el valor nominal. Transformadores de protección. Los transformadores cuya función es proteger un circuito, requieren conservar su fidelidad hasta un valor de veinte veces la magnitud de la corriente nominal, cuando se trata de grandes redes con altas corrientes puede ser necesario requerir treinta veces la corriente nominal. En el caso de los relés de sobrecorriente, sólo importa la relación de transformación, pero en otro tipo de relés, como pueden ser los de impedancia, se requiere además de la relación de transformación, mantener el error del ángulo de fase dentro de valores predeterminados. Transformadores mixtos. En este caso, los transformadores se diseñan para una combinación de los dos casos anteriores, un circuito con el núcleo de alta precisión para los circuitos de medición y uno o dos circuitos más, con sus núcleos adecuados, para los circuitos de protección. Transformadores combinados. Son aparatos que bajo una misma cubierta albergan un transformador de corriente y otro de tensión. Se utilizan en estaciones de intemperie fundamentalmente para reducir espacios. Los componentes básicos de los transformadores de corriente son: Aislamiento externo: el aislamiento externo consta de una envolvente cerámica con una línea de fuga lo suficientemente larga como para que ningún arco pueda contornear bajo condiciones de contaminación, como lluvia, niebla, polvo, etc. Aislamiento interno: puede variar según sus características constructivas. Un caso es aquél en que las partes activas se moldean en resina de epoxy que las fija, las separa y las aísla, existiendo una cámara de aire entre el aislamiento externo de porcelana y el cuerpo de resina. Esta cámara se sella herméticamente con juntas de caucho nitrílico y se la rellena con aceite aislante o gas SF6. Existe otro tipo constructivo, indicado para potencias de precisión elevadas y grandes intensidades de cortocircuito, en que el aislamiento interno suele ser cartón prespán impregnado en aceite para el conjunto de los núcleos, arrollamientos secundarios y la bajante de los conductores que unen los arrollamientos secundarios con sus cajas de bornes. Este bajante lleva incorporada en el interior de su aislamiento una serie de pantallas metálicas de forma cilíndrica, estando todo ello envuelto por un tubo metálico en forma decreciente, de forma cónica. Este conjunto constituye un capacitor que permite un reparto uniforme de tensión a lo largo de todo el aislamiento interno. El aceite que se utiliza para impregnar el cartón es desgasificado y filtrado, y cuando se rellena el transformador se hace bajo condiciones de vacío. Los transformadores con aislamiento de cartón impregnado en aceite suelen disponer de un depósito de expansión (donde va a parar el aceite sobrante cuando éste se calienta) en su extremo superior. Conviene indicar que la parte 37 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” superior del transformador, donde se halla el conjunto del núcleo y arrollamiento secundario, está moldeada en resina epoxy, formando una cabeza donde da cabida también al depósito de expansión de aceite. Este tipo constructivo de transformador se utiliza para tensiones desde 36 hasta 765 kV. 3.1.1 Simbología y marcas de polaridad. En los diagramas eléctricos, los transformadores de corriente se representan en cualquiera de las dos formas mostradas en la figura 3.1. Figura 3.1 Símbolos del transformador de corriente. En las cuales la línea horizontal representa el devanado primario que se conoce conecta en serie o se intercala en el circuito de alta tensión (AT) y el resto del diagrama, que se asemeja a una “M” corresponde al devanado secundario. La polaridad del transformador está usualmente marcada en el transformador de instrumento, pero donde no sea conocida, existen dos métodos convencionales para determinarla. Las marcas de polaridad, representadas por puntos o pequeños cuadros, designan las direcciones instantáneas de la corriente en el primario y la corriente del secundario durante medio ciclo. 3.1.2 Circuito equivalente de un transformador de corriente. La figura 3.2 muestra el circuito equivalente aproximado de un transformador de corriente. La magnitud de la corriente se reduce a través de los devanados ab y cd del transformador. La impedancia del devanado primario ( Z H ) se multiplica por n 2 para referirlo al secundario. La impedancia del secundario es Z L y las pérdidas de excitación se representan como Rm y X m . Figura 3.2 Circuito equivalente de un TC. 38 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” El devanado primario está conectado en serie con la línea o alimentador y muchas veces es ésta misma, por lo que la corriente primaria es la misma de la línea y la impedancia primaria es lo suficientemente pequeña que puede ser despreciada. La impedancia de carga es la resultante de la conexión en serie de las bobinas de corriente de los equipos de protección y medición que el TC debe alimentar; ésta tendrá siempre una magnitud pequeña para ofrecer una oposición mínima al paso de la corriente y no sacar al TC de sus características de diseño. Este circuito puede reducirse aun más, como se muestra en la figura 3.3. El valor de ( Z H ) se puede despreciar, puesto que no afecta a la corriente IH , ni al voltaje a través de X m .la corriente de excitación I e n queda representada como la corriente que circula a través de X m . transformada Figura 3.3 Circuito equivalente reducido de un TC. En la figura 3.4, se muestra el diagrama fasorial mostrando las caídas de tensión con magnitudes más grandes de las reales para visualizarlo mejor. En general Z L es resistivo. I e atrasa Vcd por 90° y es la causa principal de error. Figura 3.4 Diagrama fasorial de un TC. Es importante mencionar en este tema el efecto de saturación siendo el efecto representado por la disminución de impedancia de magnetización del núcleo, pues provoca en la mayoría de los casos un retraso en la operación de protecciones. 39 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” 3.1.3 Clasificación de los transformadores de corriente para protección. Los transformadores de corriente para la protección se clasifican según las normas nacionales (NOM-J-109/1977), mediante dos símbolos: una letra y el voltaje de clase, los cuales definen las características del transformador. Las letras de designación pueden ser: C= indica que la relación de transformación puede ser calculada. T= indica que la relación debe ser determinada mediante pruebas. La primer clasificación (C) cubre a los TC tipo dona o boquilla con el devanado secundario uniformemente distribuido o cualquier otro transformador en el cual, el flujo de dispersión en el núcleo tiene un efecto despreciable sobre el error de relación, dentro de los límites de corriente y carga establecidos por las normas. Figura 3.5 Transformador de corriente” tipo dona o boquilla”. La segunda clasificación (T) cubre la mayoría de los TC tipo devanado y cualquier otro transformador, en los cuales el flujo de dispersión afecta la relación de transformación en forma apreciable. El voltaje en las terminales del secundario, es el voltaje que el transformador entregara a una carga estándar con 20 veces la corriente nominal secundaria sin exceder el 10% de error de relación. 40 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 3.6 Transformador de corriente QDR 123 a 245 kV serie Balteau de Alsthom. Figura 3.7 Caja de terminales secundarias. El transformador de corriente tipo boquilla (o clase C) tiene el devanado secundario aislado y bobinado sobre el núcleo y no tiene devanado primario como una parte integral de su estructura. Está provisto con aislamiento en el orificio a través del cual se hace pasar el conductor de línea de alta tensión, para formar el devanado primario. Normalmente estos TC´s son de relación múltiple. Las combinaciones normales de corrientes primarias son las siguientes: 41 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” 600/500/450/400/300/250/200/150/100/50 amperes. 1200/1000/900/800/600/500/400/300/200/100 amperes. 2000/1600/1500/1200/1100/800/500/400/300 amperes. 3000/2000/1500 amperes. 4000/3000/2000 amperes. 5000/4000/3000 amperes. La corriente nominal secundaria es de 5 amperes, pero puede ser empleada una corriente nominal de 1 ampere, siempre que así se especifique. Los TC´s tipo boquilla reciben este nombre porque normalmente van instalados en las boquillas de los transformadores o interruptores de potencia. La figura 3.8 muestra un TC tipo boquilla con relación total de 1200/5. Las terminales H1 y H2 corresponden a la línea de alta tensión, que forma el devanado primario y las terminales marcadas con las letras “X” corresponden a las derivaciones del devanado secundario. Las marcas de polaridad están representadas implícitamente por H 1 en el primario y en el secundario por la X de menor índice (considerando las dos terminales en uso). Figura 3.8 Transformador de corriente tipo “boquilla” con relación múltiple. El transformador de corriente es aquel en el cual el devanado primario está fijado mecánicamente al núcleo y puede tener una o más vueltas primarias. Los devanados primario y secundario están aislados completamente y permanente unidos al núcleo formando una estructura integral. Las relaciones normalizadas para los transformadores de corriente tipo devanado son: 5:5; 10:5; 15:5; 20:5; 25:5; 30:5; 40:5; 50:5; 75:5; 100:5; 150:5; 200:5; 250:5; 300:5; 400:5; 500:5; 600:5; 800:5; 1000:5; 1200:5; 1500:5; 1600:5; 2000:5; 3000:5; 4000:5; 5000:5; 6000:5; 8000:5; 12000:5 42 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 3.9 Esquema del transformador de corriente tipo “dona”. En cada relación el primer número corresponde a la corriente nominal del devanado primario y el segundo número a la corriente en el devanado secundario, que en todos los casos es de 5 amperes. Para el caso del transformador de corriente de doble relación se tienen los siguientes valores normalizados: 5 X 10:5; 10 X 20:5; 15 X 30:5; 25 X 50:5; 50 X 100:5; 75 X 150:5; 100 X 200:5; 150 X 300:5; 200 X 400:5; 300 X 600:5; 400 X 800:5; 500 X 1000:5; 600 X 1200:5; 1000 X 2000:5; 2000 X 4000:5; Los bornes de los arrollamientos primario y secundario deben poder ser identificados con fiabilidad. Para ello, en la norma IEC 60185 se indica el criterio a seguir para su nomenclatura, siendo aquellos bornes que empiecen con P y C los del arrollamiento primario, y los que empiecen con S los del arrollamiento secundario. En la figura 3.10 se visualizan los diferentes casos: 1. Transformador de simple relación. 2. Transformador con toma intermedia en el secundario. 3. Transformador con dos secciones en el arrollamiento primario para su conexión en serie o paralelo. 4. Transformador con dos arrollamientos secundarios y núcleos independientes. 43 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 3.10 Esquemas típicos de conexión de los TC´s. En la figura 4 dentro de la figura 3.10 existen dos posibilidades de identificación de los bornes secundarios. Todos los terminales identificados con P1, S1 y C1 deben tener la misma polaridad en el mismo instante. Los bornes terminales deben marcarse o identificarse clara e indeleblemente sobre su superficie o en su inmediata vecindad. La identificación consiste de letras seguidas, o precedidas donde fuera necesario, por números. Las letras deben ser siempre mayúsculas. Figura 3.11 Relación de transformación simple. Figura 3.12 Relación de transformación doble por acoplamiento serie-paralelo del primario. 44 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 3.13 Doble secundario y relación de transformación doble en cada secundario. La figura 3.14 muestra la capacidad de voltaje secundario para varios transformadores de corriente clase C graficados contra corrientes secundarias. Con un transformador de clase C200 por ejemplo, la relación de transformación puede ser calculada y el error de relación no debe ser mayor del 10% con corrientes entre 1 y 20 veces la corriente nominal, si la carga no excede el valor de 2Ω. El numero 200 indica que en las terminales secundarias del transformador aparecen 200 volts cuando entrega una corriente de 100 amperes (20 veces la corriente nominal secundaria de 5 amperes) a la carga normalizada B 2.0 (2.0Ω) de acuerdo con V=ZI. Figura 3.14 Características de transformadores de corriente tipo “C”. La precisión normalizada, se aplica solamente al devanado completo del transformador. Cuando se usa una derivación (parte del devanado), se tiene un voltaje menor proporcional al voltaje nominal (observar tabla 3.1). Además de la precisión el fabricante deberá suministrar otros datos sobre los transformadores, como la capacidad térmica, resistencia del devanado secundario, curvas de excitación (también llamada curva de saturación); cuando se trate de un TC del tipo “C”. En el caso del TC tipo “T” se suministra además el error de relación y ángulo medido mediante un puente patrón, además del valor de la corriente de excitación que resulta al aplicar el voltaje de clase al devanado secundario. 45 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Tabla 3.1 Clases de precisión del transformador de corriente para protección. Las cargas normalizadas para los transformadores de corriente se muestran en la Tabla 3.2. Para el caso de los transformadores de corriente tipo “C”, cuando se usa solo una parte del devanado, únicamente puede aplicarse una parte de la carga normalizada, sin exceder el 10% de error. Tabla 3.2 cargas nominales para transformadores con corriente nominal a una frecuencia de 60 Hz. Se debe mencionar también que los transformadores de intensidad deben llevar una placa de características, indeleble, en la que deben figurar, las siguientes indicaciones según la norma IEC 60185: Nombre del constructor o cualquier otra marca que permita su fácil identificación. Número de serie y designación del tipo. Corrientes nominales primaria y secundaria en amperes. Frecuencia nominal en Hz. Potencia de precisión y clase de precisión correspondiente a cada núcleo. Tensión más elevada de la red. Nivel de aislamiento nominal. 46 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” 3.1.4 Conexiones de transformadores de corriente. Para la protección de los sistemas de potencia trifásicos generalmente se utilizan las conexiones delta y estrella en los devanados secundarios de los transformadores de corriente. En la figura 3.15 (a), se puede apreciar la conexión de los transformadores en estrella, y en la figura 3.15 (b) se observa el diagrama vectorial de las corrientes primarias y secundarias. Para la conexión estrella, se unen las terminales de no polaridad para formar la estrella y se aterriza. Las terminales de polaridad van conectadas a los relevadores de protección. Figura 3.15 (a) Conexión en estrella de transformadores; (b) diagramas vectoriales de las corrientes secundarias y primarias. En cuanto a la conexión delta existen dos posibilidades para llevarla a cabo, hablando de un primera caso se tiene que las corrientes fuera de la delta, es decir, las corrientes que van a los relevadores están adelantadas 30° con 47 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” respecto a las corrientes de fase y para el segundo caso, dichas corrientes están atrasadas por el mismo ángulo. Se considera un sistema balanceado. Figura 3.16 (a) Conexión en delta de transformadores; (b) diagramas vectoriales de las corrientes secundarias y primarias. En la figura 3.16 (a) se puede observar la conexión de transformadores de corriente en delta; y en la figura 3.16 (b) se observa el diagrama vectorial de las corrientes primarias y secundarias. Las corrientes fuera de la delta están adelantadas 30° respecto a la corriente de fase. 48 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 3.17 (a) Conexión en delta de transformadores; (b) diagramas vectoriales de las corrientes secundarias y primarias. 3.2 Transformadores de potencial. Un transformador de tensión es un dispositivo destinado a la alimentación de aparatos de medición y /o protección con tensiones proporcionales a las de la red en el punto en el cual está conectado. El primario se conecta en paralelo con el circuito por controlar y el secundario se conecta en paralelo con las bobinas de tensión de los diferentes aparatos de medición y de protección que 49 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” se requiere energizar. Cada transformador de tensión tendrá, por lo tanto, terminales primarios que se conectarán a un par de fases o a una fase y tierra, y terminales secundarios a los cuales se conectarán aquellos aparatos. En estos aparatos la tensión secundaria, dentro de las condiciones normales de operación, es prácticamente proporcional a la tensión primaria, aunque ligeramente desfasada. Desarrollan dos funciones: transformar la tensión y aislar los instrumentos de protección y medición conectados a los circuitos de alta tensión. En esta definición tan amplia quedan involucrados los transformadores de tensión que consisten en dos arrollamientos realizados sobre un núcleo magnético y los transformadores de tensión que contienen un divisor capacitivo. A los primeros los llamaremos en adelante "Transformadores de Tensión Inductivos" y a los segundos "Transformadores de Tensión Capacitivos". Es de hacer notar que estas denominaciones no son de uso universal, pero consideramos que son las que mejor se adaptan a la Norma IRAM 2271, que incluye a los dispositivos con divisor capacitivo. Estos transformadores se fabrican para servicio interior o exterior, y al igual que los de corriente, se fabrican con aislamientos de resinas sintéticas (epoxy) para tensiones bajas o medias de hasta 33 kV, mientras que para altas tensiones se utilizan aislamientos de papel, aceite, porcelana o con gas SF6. 3.2.1 Relación de transformación. La relación de transformación está en función del voltaje nominal primario y el voltaje nominal secundario, este último es normalmente de 120 / 3 para protección y 200 / 3 para medición 3.2.2 Clases de precisión. Las clases de precisión normalizadas para los transformadores de potencial son 0.3, 0.6 y 1.2. Se designan por el máximo error admisible expresado en porciento, que el transformador puede introducir en la medición de potencia, operando con su tensión nominal primaria y a su frecuencia nominal. La clase de precisión especificada debe asociarse con una o varias cargas nominales de precisión. Para un transformador de potencial con una especificación de 0.6Y, 1.2Z, significa que para una carga Y tendrá un error de relación y ángulo no mayor de 0.6% y si la carga es Z, su error será de 1.2%. 50 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” En la figura 3.18 se muestran los tres paralelogramos que representan los límites del error para un transformador de potencial de clases de precisión 0.3, 0.6 y 1.2. Las cargas normalizadas para los TC se muestran en la Tabla 3.3. En el caso de los TC tipo “C”, cuando se usa sólo una parte del devanado, únicamente puede aplicarse una parte de la carga normalizada, sin exceder el 10% de error. Tabla 3.3 Cargas nominales de precisión usuales para transformadores de potencial con tensión secundaria nominal de 120 y 69.3 volts. Para mediciones en aparatos en que se considera solo la magnitud del voltaje, los límites del factor de corrección de la relación están dados por las líneas horizontales de las graficas. Ejemplo: para la precisión 1.2, los límites del FCR, son: %E 1. 2 FCR1, 2 1 1 100 100 El límite superior es: FCR1 1 0.012 FCR1 1.012 FCR2 1 0.012 FCR2 0.998 El límite inferior es: Las líneas oblicuas representan los valores correspondientes al error de ángulo. (Ver figura 3.18). 51 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 3.18 Clases de precisión para los transformadores de potencial. 3.2.3 Conexiones de transformadores de potencial. En caso de circuitos muy importantes, se utiliza un juego de transformadores de potencial exclusivos, instalados en el propio circuito. Lo más usual es instalar un juego de transformadores de potencial por barra y con ello se polarizan todos los circuitos correspondientes a la misma barra. Los transformadores de potencial normalmente tienen tres devanados secundarios, uno de los cuales se utiliza para medición, el segundo para polarizar relevadores con voltajes de fase y tierra y el tercero se conecta en delta quebrada (o delta rota) para polarizar relevadores con 3Vo (ver figura 3.19). 52 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 3.19 Diagrama típico de conexión de transformadores de potencial, para usarse en circuitos de potencia. 53 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CAPÍTULO IV Descripción general de la protección de sobrecorriente, direccional y de distancia. 4.1 Protección contra sobrecorriente por relevadores. La protección de sobrecorriente es de las más sencillas y económicas que tiene su aplicación en los alimentadores radiales, líneas de transmisión cortas, en líneas de cierta importancia como de respaldo para proteger equipos de pequeñas capacidades, etc. El relevador que se usa en esta protección es el llamado “Relevador de Sobrecorriente”, de esta clase de relevadores hay varios tipos: Instantáneos y de tiempo retardado o combinados. Generalmente se usan los combinados. Sus características de tiempo permiten formar cascadas en cuanto a tiempo de apertura, así como tomar en cuenta la magnitud de la falla de tal manera que en cuanto más corriente haya, menos tiempo tarda en operar el relevador, característica llamada de “Tiempo Inverso”. El principio en que se basan, es la inducción, aún cuando puede contar con un elemento instantáneo que es de atracción electromagnética. Estas características de tiempo de los relevadores se pueden comprender mediante las curvas de tiempo inverso. Cada una de las curvas es una posición en la que se puede colocar el relevador. Si por ejemplo ponemos la curva (1) el relevador trabajara de acuerdo con ésta y operara en un tiempo determinado de acuerdo con la corriente que circula en su bobina. Esta corriente está indicada en el eje horizontal en forma indirecta, puesto que no está marcada en amperes, sino en veces o múltiplos de la corriente de operación, es decir, si nosotros deseamos que el relevador no opere con una cierta corriente “X” o que opere pero en tiempo infinito, ésta será la base que tenemos marcada en la gráfica (Ver figura 4.1). Como se ve esta corriente empieza con 1.5 veces y se termina con 20 veces, cosa que está dentro de los límites medios y el operador puede ajustar el relevador para que trabaje en la curva que se desee. 54 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 4.1 Curvas de tiempo inverso. Si por ejemplo se ajusta sobre la curva de 10 se verá que no se opera, sino que hasta que por su bobina circulen corrientes 2.5 veces la mínima a que nos hemos referido y con tiempo entre 7 y 3 segundos. Esta característica de tiempo inverso de los relevadores de sobrecorriente que produce el elemento de inducción nos permite aplicarles a un sistema de cascada como el siguiente. Figura 4.2 Sistema en cascada. 55 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” El diagrama mostrado en la figura 4.2 indica que los interruptores más lejanos de la fuente pueden operar más rápidamente, en cambio los que se encuentran más próximos pueden ajustarse a un tiempo mayor, todo esto sobre la base de una misma corriente, es decir, que sobre la base de una misma corriente que fuera por ejemplo 5 veces la mínima de operación, el relevador del último paso operara en ½ segundo y el del penúltimo paso operara en un segundo y el primero en tres segundos. Sobre la base de otra corriente el tiempo de operación sería distinto, pero de acuerdo con las curvas de ajuste de cada relevador, sin embargo, operarían primero los últimos y después los más cercanos a la fuente de energía. Por su lado el elemento instantáneo que no está basado en el principio de inducción, sino de fuerza electromagnética, es de ajuste muy alto, es decir, solo opera con corrientes muy altas y su acción es muy rápida. Un ajuste más que debe tomarse en cuenta, es el de sobrecarga, para lo cual los relevadores tienen un grupo de derivaciones en sus bobinas de operación. Para comprender claramente el significado de lo anterior, veremos un ejemplo: Ejemplo: si se tiene un sistema por donde circulan 300 amperes normales y si se instala un juego de transformadores de corriente de 300/5 amperes, o sea una relación de 60:1, el ajuste del relevador deberá estar de acuerdo con la sobrecarga permisible. Si se desea que esta sea de 25, 50, 100%, etc. Tendremos entonces la mínima de operación del relevador o sea la máxima corriente permisible, siendo en este caso de 375 amperes, 450 amperes o 600 amperes, respectivamente. Escogeremos entonces la derivación más cercana del relevador. Los relevadores más comunes tienen las siguientes derivaciones: 4, 5, 6, 8, 10, 12, 16 Otros con 1.5, 2.0, 2.5, 3.0, 4.0, 5.0, 6.0 Otros como son los que se usan en sobrecorriente de tierra tiene: 0.5, 0.6, 0.8, 1.0, 1.2, 1.5 y 2.0 En el ejemplo que estamos analizando para corriente de 6.25 amperes, pondríamos las derivaciones de 6, para 7.5 amperes, la derivación de 8, y para 10 amperes, la derivación de 10. 4.2 Coordinación por ajuste de corriente y por ajuste de tiempo. El concepto más simple en la coordinación de relevadores es el gradiente de corriente de tal forma que los relevadores tienen diferente tiempo de disparo. Supóngase que se tiene un sistema como el de la figura 4.3: 56 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 4.3 Sistema eléctrico de potencia básico. En el sistema anterior los relevadores ajustados trabajan mejor cuando la impedancia de la fuente Zf es mucho menor que la línea Zl, ya que entonces la corriente de falla para una terminación remota es considerablemente menor que para una falla en el extremo de la fuente. Suponiendo que ocurre una falla de 80 Amperes en el lado de la carga, siguiendo el principio de ajuste de corriente solo los relevadores de 50 amperes harían operar a sus correspondientes interruptores ya que los interruptores ajustados para 100 y 200 amperes tienen el ajuste de sus relevadores arriba del valor de la corriente de falla, sin embargo este no es el caso general de ajuste de relevadores de sobrecorriente ya que puede ocurrir en el lado de la carga una falla que demande una corriente mayor, por ejemplo 250 Amperes y entonces los tres interruptores operarían, para comprender en qué consiste el ajuste por corriente y porque solo el interruptor de la carga operaria en lugar de los tres basta examinar la siguiente curva característica tiempo-corriente de los relevadores. Figura 4.4 Características de tiempo-corriente de los relevadores. Las curvas características mostradas en la figura 4.4 corresponderían a relevadores que son del tipo que operan más rápido para valores grandes de corrientes de falla que para valores pequeños de corrientes de falla conocidas 57 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” como relación inversa tiempo-corriente y es una característica típica de los relevadores de inducción. Nótese en la figura que el tiempo t 1 del relevador que controla al interruptor de 50 Amperes es menor que t2 y t3 por lo que la falla la interrumpirá el interruptor de 50 Amperes antes que operen los relevadores de los interruptores de 100 y 200 Amperes. En caso de que por alguna razón no interrumpiera el interruptor de 50 Amperes, lo haría el de 100 Amperes en un tiempo t 2, y si esto no ocurriera así lo haría el de 200 Amperes en un tiempo t 3. No todas las situaciones permitirán usar relevadores de ajuste inverso ya que por ejemplo cuando la impedancia de la fuente Z f es grande con respecto a la impedancia de la línea la corriente de falla no es mayor cerca de la fuente que para una falla en el extremo del alimentador de la carga lo que implica la necesidad de revisar para diferentes localizaciones de la falla. En lo que se refiere a la coordinación por ajuste de tiempo se tiene que los relevadores empleados es este esquema se denominan definidos en lugar de los conocidos como inversos de sobrecorriente; esto significa que los relevadores definidos tiene un valor especifico de disparo por corriente una vez que se ha alcanzado ese valor de corriente para disparar. El valor real de tiempo de operación es independiente de la corriente. En la figura 4.5 se ilustra y compara las relativas relaciones tiempo-corriente de varios elementos de sobrecorriente. Figura 4.5 Relaciones tiempo-corriente de varios elementos de sobrecorriente. El concepto de coordinación de los relevadores por tiempo considérese la figura 4.6 que se trata de un sistema con tres relevadores fuente. 58 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 4.6 Sistema con tres relevadores fuente. Considérese que son tres relevadores están ajustados para operar al mismo valor de corriente, sin embargo los relevadores más cercanos a la fuente darían un mayor tiempo de retraso para proporcionar el respaldo y la selectividad necesaria. El relevador A respalda a los relevadores B y C, en tanto que el relevador B respalda al C no obstante una falla que ocurra entre los interruptores A y B tendrá un largo tiempo de retraso antes de que sea liberada por el interruptor A, esta es la principal desventaja de usar la coordinación con relevadores de tiempo definido. Por lo general los relevadores de tiempo definido deberían ser usados únicamente en sistemas aislados o como respaldo de relevadores de impedancia o diferenciales. 4.3 Relevadores de sobrecorriente de tipo instantáneo. Si el relevador opera instantáneamente sin ningún retardo intencional en el tiempo se denominan instantáneos y esta característica se puede lograr por medio de relevadores del tipo de armadura de atracción no polarizada, tiene la ventaja de reducir el tiempo de operación a un mínimo para fallas muy cercanas a la fuente cuando la corriente de falla es muy grande y es efectivo solo cuando la impedancia entre el relevador y la fuente es pequeña con la impedancia de la zona por proteger. Una de las importantes consideraciones en la aplicación de relevadores de sobrecorriente y sobrevoltaje es su velocidad de operación, los relevadores de acción instantánea se emplean para fallas de línea a tierra restringidas y otras formas de circulación de corriente. La relación X/R del sistema de la fuente a la falla controla el grado de desajuste y el índice de decremento de la onda de corriente y la relación de al impedancia de la fuente a la impedancia de la carga el grado de rapidez que puede ser logrado. Para que un esquema de protección como este sea eficiente se requiere que a falla mínima de corriente de falla exceda a la máxima corriente de carga. 4.4 Relevadores de sobrecorriente a tierra. Cuando un relevador de sobrecorriente se conecta en el punto neutro de sus transformadores de corriente solo es sensitivo a las fallas a tierra. Dado que tales relevadores a tierra no son sensitivos a las corrientes desbalanceadas de línea, no detectan corrientes de carga y por lo tanto se pueden ajustar para operar a valores mucho más bajos de corriente que los relevadores de fase, 59 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” esto conduce en gran medida más rápida que la lograda con los relevadores de fase. En la figura 4.7 se muestra la conexión típica de los relevadores de sobrecorriente a tierra. Figura 4.7 Conexión típica de relevadores de sobrecorriente a tierra. 4.5 Relevadores direccionales. La protección direccional es de las más sencillas y tiene múltiples aplicaciones, además de ser una de las más económicas para pequeños sistemas en anillos, donde existen derivaciones que pueden ser controlados con interruptores. Un ejemplo de esto se tiene en el siguiente sistema que se explica a continuación, en las figuras 4.8 y 4.9. Figura 4.8 Anillo de una subestación en derivaciones. 60 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 4.9 Anillo de una subestación en derivaciones (con tiempos de operación). Un anillo como el mostrado con subestaciones en las derivaciones marcadas, se usa para la protección direccional en los interruptores indicados por las flechas, de tal manera que operan cuando hay una falla en el sector comprendido entre dos interruptores, por ejemplo, si existiera una falla en el punto A se abrirían los interruptores E y F, porque la alimentación al cortocircuito esta en el sentido en que debe operar la protección direccional, en cambio los interruptores D y G permanecerán cerrados, los demás interruptores que tienen el mismo sentido de los E y F, se ajustan sus tiempos de operación. Partiendo por la rama derecha el interruptor más alejado de los que operan en el mismo sentido, es el interruptor B y es el que se debe tener un ajuste de tiempo menor, por ejemplo 0.1 seg., el D llevara un tiempo ligeramente mayor de 0.2 seg., el F, 0.3 seg., el H;0.4 seg., y el J, 0.5 seg. Partiendo por la rama izquierda, siguiendo el sentido de las corrientes de operación también se ajustan los tiempos quedando: interruptor K, que es el más alejado en este sentido y contrario al anterior, 0.1 seg., I, 0.2 seg., G, 0.3 seg., E, 0.4 seg., y C, 0.5 seg. De esta manera, se logra que es falla en cualquier punto no trascienda a otra parte del sistema y no operen falsamente otros interruptores, sucediendo esto en la siguiente forma. Si se analiza el mismo punto A, de acuerdo con los sentidos de operación, se abre primero el F, en el sentido de la rama derecha, después el H, y por último el J. del otro lado se abriría primero el E y después el C, logrando así la combinación de ajustes de tiempo y dirección, además de aislar la parte del sistema afectada, sin interrumpir el servicio de las subestaciones. 61 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Los interruptores A y L no necesitan protección direccional, y con sobrecorriente y su ajuste de tiempo será suficiente. En la figura 4.10 se puede observar otro ejemplo de la aplicación de la protección direccional. Figura 4.10 Ejemplo de una aplicación de protección. En líneas de alimentación que trabajan en paralelo, se usa protegerlos direccionalmente haciendo que los interruptores operan en la forma indicad con las flechas. Si existe una falla en una de ellas, por ejemplo en el punto A, únicamente operan los interruptores 3 y 4. La protección direccional comprende dos partes, la dirección de la potencia y la sobrecorriente que produce la falla, los relevadores pueden estar construidos para comprender los dos tipos elementos en la misma caja o separados. El elemento de potencia direccional puede también basarse en el principio de inducción utilizando dos fuentes de alimentación del mismo sistema, que pueden ser corriente y voltaje o corriente y corriente y en este último de diferentes partes del sistema. La operación de estos relevadores depende de la comparación de estas dos cantidades y del ángulo que forman entre ellas. Se procura tener una de ellas fija o como punto de referencia, llamándose fuente polarizante. Tomando por ejemplo el voltaje como factor de referencia de corriente puede variar en magnitud y en ángulo con respecto a este de tal manera que cuando el extremo del vector corriente caiga en una región determinada, opera el relevador, así en el siguiente diagrama se ven los vectores mencionados (figura 4.11). Figura 4.11 Diagrama de los vectores donde opera el relevador. 62 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Haciendo permanecer fijo el vector voltaje en la posición marcada y considerando que la corriente puede variar tanto en magnitud como en ángulo a través de los 360° y considerando que la corriente y el voltaje provienen de fuentes como la indicada en la figura que marcan un desfasaje de 30° (figura 4.11). Figura 4.12 Conexiones internas y externas de un relevador direccional. El diagrama nos explica que cuando la corriente y el voltaje forman un ángulo de 30° al llegar al relevador, trabaja este en sus condiciones mejores y haremos adaptaciones al aparato para que en este momento nos produzca el máximo par en el disco. Si hay variaciones de la corriente en ángulo dentro de la región no sombreada habrá operación del disco mientras que cuando la corriente se encuentre en la región sombreada no se permitirá que el relevador trabaje. Cuando por necesidades del sistema quisiéramos que el relevador operara precisamente en sentido contrario el mencionado anteriormente, es decir; que la operación del relevador se efectuara con una corriente contraria a la que consideramos solo tendríamos que cambiar la conexión de la bobina de corriente en cuanto a polaridad, esto es, cambiando X 1 por X2, y por lo tanto las condiciones del relevador y las características de dirección dependerán de la polaridad que pueden depender de las conexiones externas o internas del relevador direccional, figura 4.12. Las combinaciones del voltaje y la corriente pueden ser analizadas vectorialmente y presentan tres tipos que se usan en los sistemas direccionales. 1. Conexión de 90°. 2. Conexión de 30°. 3. Conexión de 60°. Estas conexiones están representadas en los siguientes diagramas vectoriales, mostrados en la figura 4.13. 63 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 4.13 Tipos de conexiones en diagrama vectorial. Las conexiones que producen estos diagramas se muestran en la figura 4.14. Figura 4.14 Tipos de conexiones de los Transformadores de Potencial. 4.6 Relevadores de distancia. Con la necesidad de reducir la duración de una falla que ocurriese en algún punto de una línea de transmisión la cual forma gran parte de una red eléctrica de un sistema de potencia. Estos relevadores comparan y equilibran las 64 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” señales de tensión y corriente, las cuales pueden expresarse en función de la impedancia. Esta impedancia es una medida eléctrica de la distancia a lo largo de una línea de transmisión. Los relevadores de distancia actualmente son muy utilizados y tiene muchas aplicaciones en redes eléctricas de alta tensión. Estos relevadores son para protección de fase, aunque también los hay para la protección de distancia de tierra. Tiene tres zonas de protección. La primera y segunda zona checa la distancia por medio de una unidad la cual tiene una característica de reactancia (u ohm), la tercera zona checa la distancia por medio de una unidad la cual tiene una característica direccional (o mho). Para que un relevador de distancia opere tiene que haber ciertas relaciones de las magnitudes de tensión, corriente y ángulo de fase. Estos relevadores debido a sus características de reactancia de su primera y segunda zona, son particularmente convenientes para la protección de circuitos donde la resistencia de arco es un problema. Puesto que la resistencia de arco es una falla está directamente relacionada con la longitud del arco e invers amente a la corriente, la resistencia de arco es independiente de la longitud de la línea. Así pues, la resistencia de arco llega a ser la parte más significativa de la impedancia total desde el relevador al punto de falla según se consiga acortar la longitud de la línea protegida. Por esta razón, estos convenientes para proteger líneas de transmisión cortas. Sin embargo tales relevadores también pueden ser aplicados sobre líneas largas si el rango del relevador permite el ajuste del alcance requerido. La unidad de reactancia en cada relevador proporciona diferentes ajustes del alcance mínimo básico. No es recomendable que la unidad ohm sea ajustada por medio de taps en menos de 10%. La tercera zona o unidad mho de los relevadores es ajustada para que tenga un ángulo de par máximo de 60°. No es recomendable que la unidad significante sobre-alcance, las unidades de la primera zona puede ser ajustadas para que operen sobre un 90% de la distancia desde el relevador hasta el punto más remoto. Las unidades de segunda zona deberán ajustarse a que alcance al menos 110% de la terminal remota más lejana. La unidad de tercera zona deberá ajustarse para que alcance lo suficiente como para asegurarse que se acomode la resistencia de arco en el punto de balance de la segunda zona. La unidad mho es del tipo de cilindro de inducción con cuatro polos. Los dos polos laterales, se energizan con un porcentaje del mismo voltaje entre fases, interaccionando con el flujo de polarización produciendo el par de restricción. El flujo en el polo posterior, energizado con las corrientes de las dos líneas asociadas con las mismas fases del voltaje, interaccionado con el flujo de polarización para producir par de operación. T K1 EI cos( Donde: E Voltaje de fase. I La corriente delta. 65 ) K2E 2 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Ángulo de par máximo de la unidad. Ángulo del factor de potencia de la impedancia de la falla. K1 Constante de conversión del par positivo. K 2 Constante de conversión del par negativo. Dividiendo por E 2 y despejando K 1 y K 2 , la ecuación se reduce a la siguiente expresión en términos de impedancia. I cos( Z ) Y cos( ) K2 K1 CONSTANTE CONSTANTE. En esta forma la unidad opera para una componente constante de la admitancia a un ángulo fijo, dependiendo del ángulo de par máximo. La unidad mho tiene la característica de impedancia circular que pasa por el origen y que tiene su centro en la línea de ángulo de par máximo de la unidad. El alcance mínimo básico de la unidad en el ángulo de par máximo es obtenido cuando el E2 o tap de restricción está sobre el porcentaje del voltaje de falla aplicado al circuito de restricción, lo cual se logra haciendo que los taps de restricción, E2 sean bajos, los cuales generalmente vienen expresados en porciento. El alcance óhmico de la unidad de la línea de transmisión con su ángulo correspondiente, el cual usualmente difiere del ángulo de par máximo, puede ser determinado mediante la siguiente ecuación: Alcance óhmico a un determinad o ángulo de línea (Tap de entrada)Z mín cos( E 2 ajuste del Tap (%) ) Donde: Ángulo de par máximo de la unidad. Ángulo de línea. Z mín Alcance óhmico básico de fase de la unidad tap de entrada. Z mín E2 Ajuste del tap de entrada en porciento. Ajuste de tap en (%)=voltaje de restricción ( E 2 ) , ajuste de tap en porciento El propósito primario de la unidad mho en los relevadores de distancia es proporcionar una discriminación direccional la cual es necesaria puesto que la unidad ohm es inherentemente no direccional. Las características direccionales de la unidad mho son tales que la hacen que opere correctamente para fallas hacia adelante o hacia atrás en voltajes abajo del 1% del rango de voltaje sobre un rango de corriente de 5 a 60 Amperes. Un propósito secundario de la unidad mho es medir la impedancia de falla de la tercera zona de protección. 66 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 4.15 Diagrama de la característica de operación. La unidad ohm es también del tipo de unidad de inducción de cuatro polos. Los polos frontales y posteriores son energizados por la corriente delta, produciendo flujo de polarización. Los polos laterales son energizados con un voltaje igual a la diferencia entre la cantidad de operación IZT y el voltaje de restricción E, donde I es la corriente delta y ZT es la impedancia de transferencia del transactor. El par es la unidad resulta de la interacción entre el flujo neto frontal y posterior y el punto de polarización en los polos frontal y posterior y el punto de balance pueden ser expresados con la siguiente ecuación: T 0 KI ( IZT E )senB Donde: E voltaje de fase a fase (E12 ). I corrientedelta ( I 1 I 2 ). ZT impedancia de transferencia del transactor (constantede diseño). B ángulo entre I e /IZT - E). K constantede diseño. Por medio de relaciones trigonométricas, la ecuación anterior puede ser reducida a: ( KI )(IZTsen KI ( E )sen ) 0 Donde: 67 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” ángulo entre I e IZT (esto es el ángulo del transactor, constante de diseño). ángulo entre E e I (esto es el ángulo de la impedancia de la falla). Puesto que ZT para un tap de ajuste en particular el transactor es también una constante de diseño, la ecuación queda: KY2 KIESen K K K K Sen E ISen KF En esta forma la unidad opera cuando la reactancia de falla XF es menor que una constante determinada por la característica del transactor y del tap de ajuste. Las características de impedancia de la unidad ohm cuando se representa sobre un diagrama R-X es una línea recta con el eje R. la unidad operará para impedancias de fallas falsas. Debajo de las características de la unidad, ahí no es direccional. Durante condiciones normales cuando se está alimentando carga por la línea protegida, el voltaje y la corriente suministrados a la unidad presentan una impedancia que está cerca del eje R puesto que la carga tiene un factor de potencia cerca de la unidad en contraste KVA reactivos que fluyen durante condiciones de falla. Una impedancia, cerca del eje R estará bajo la característica de la unidad ohm, por lo tanto sus contactos cerraran. Esto no causa problemas, puesto que el contacto de la unidad mho la cual es del tipo direccional no cerrará bajo estas condiciones. Tal como se muestra en la figura 4.15. El ajuste requerido para proteger una línea de x ohms la longitud, donde X es la reactancia positiva (de fase a neutro) expresada en ohms secundarios, es determinado por la siguiente ecuación: Ajuste de salida en % (ajuste de entrada en %)(ohms mínimos básicos) X Existen varios tipos de relevadores de distancia a los cuales tiene el mismo principio de funcionamiento, solamente cambian en algún o algunos elementos componentes, según la aplicación que se les vaya a dar o ciertas consideraciones que se deban tener en cuenta, tales como: funcionalidad, rapidez, eficacia, economía, etc., de cada tipo de relevador. 4.7 Relevador diferencial. La protección diferencial estriba esencialmente en la diferencia de dos magnitudes eléctricas al compararlas vectorialmente dentro de un relevador. 68 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” La protección diferencial está indicada en el diagrama de la figura 4.16. La diferencia de las corrientes que pasan por la bobina es igual a cero, condiciones normales, ya que la corriente I 1 es igual a la corriente I2. Figura 4.16 Diagrama de flujos de corriente en relevador diferencial normal. Si hubiera una falla en el interior de este tramo, las corrientes I1 e I2 serían distintas en magnitud y en sentido al mostrado, y aparecería una corriente de operación en el relevador que cerrará los contactos y estos a su vez, hicieran abrir los interruptores extremos del tramo de línea, como se muestra en la figura 4.17. Figura 4.17 Diagrama de flujos de corriente en relevador diferencial con falla. Si la falla ocurriera en el exterior o fuera de los puntos donde se encuentran los transformadores de corriente, volveríamos a caer en la primera condición, solo las corrientes I1 o I2 serian mucho mayores que las normales. El tramo de línea aquí representado, puede ser sustituido por cualquier sección del sistema que comprenda equipo eléctrico, como son: Transformadores, Generadores, etc., sin embargo como las corrientes de entrada y salida pueden ser distintas debido a los cambios de voltaje, solo será necesario que los transformadores de corriente, den la relación de transformación correcta en Amperes, a fin de que la cantidad de energía que entra por un lado, sea igual a 69 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” la que sale por el otro, y que la diferencia vectorial de las corrientes entrantes y salientes, sean igual a cero, para que la condición de estabilidad permanezca. En caso de cualquier falla interna, existirá un desbalanceo y al comparar las corrientes, habrá una diferencia que hará operar la protección. Con el propósito de estabilizar el funcionamiento de estos relevadores diferenciales, se ha incluido en ellos una bobina más, a la cual se le ha llamado restrictora, ver figura 4.18. Figura 4.18 Diagrama de flujos de corriente en relevador diferencial con bobina restrictora. Los efectos de estas dos bobinas son opuestas y su funcionamiento se explica de la siguiente manera: La bobina operadora trabaja en proporción a la diferencia de las corrientes I 1-I2 a medida que esta diferencia es más grande, tiene mayores efectos. La bobina restrictora está formada por dos partes, una que es atravesada por una corriente proporcional a I1 y otra por I2, y como la derivación está en el punto medio de los Amperes-vueltas de las dos mitades son proporcionales a: N xI 1 Y 2 N xI 2 2 Donde N, es el número de vueltas, lo que da por resultado que la suma de estas dos partes es igual a: N ( I1 I 2 ) 2 La operadora por lo tanto trabaja en proporción a I 1-I2 y la restrictora en proporción a: ( I1 I2 ) 2 70 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Hay sin embargo una cantidad admitida de no operación comprendida entre estas dos corrientes I1 o I2 que permite que en la diferencia esté incluida cierta cantidad de energía que se pierde en el interior del tramo protegido. Esta cantidad puede representar las pérdidas naturales de un transformador o algunas otras corrientes de fuga naturales del sistema, y aun las diferencias que marcan los transformadores de corriente, cuando se saturan sus núcleos son corrientes muy altas, y por lo tanto, esta diferencia I 1-I2 es imposible mantenerla en cero. Por esta razón los relevadores están adaptados para incluir una diferencia antes de operar. A medida que las corrientes aumentan, por ejemplo, cuando hay un cortocircuito en el exterior del tramo mencionado, la diferencia también aumentaría y no conviene que nuestros relevadores operen aun en este caso por lo que se construyen estos aparatos para operar no propiamente con la diferencia sino con el porciento de diferencia con respecto a una de las corrientes, I1 o I2 (generalmente la más pequeña), la cual si permanece constante denominándose por esta razón, este tipo de relevadores de porcentaje diferencial. Las características de porciento de pendiente de un relevador diferencial son de las más interesantes y nos muestran rápidamente las condiciones dentro de las cuales va a operar se encuentran por ejemplo, ajustes en el aparato para dar 10, 15, 25, 40%, etc., porcientos de pendiente que el operador escoge de acuerdo con las condiciones del sistema. Si por ejemplo, la corriente que atraviesa el sistema es de 500 Amperes y se va a permitir una máxima diferencia de corrientes de 75 Amperes, el porciento de la diferencia será: 75x100 500 15% Entonces se ajusta el relevador a 15% de pendiente. La condición de pendiente como característica se explica de la siguiente manera: Como se expresó anteriormente la bobina operadora depende o está su funcionamiento en proporción a la diferencia de las corrientes I 1-I2, en cambio la bobina restrictora se rige por la semisuma de las corrientes. I1 I2 2 O sea la corriente media. Los relevadores se construyen para operar no con la corriente media, sino con la corriente más pequeña o sea la que entra y sale del sistema, para mayor comodidad en los cálculos y ajustes. 71 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Usando entonces la diferencia de corriente y la corriente I 2 que suponemos es la parte de corriente no afectada, se puede trazar el siguiente diagrama, mostrado en la figura 4.19: Figura 4.19 Diagrama que muestra la diferencia de corrientes y la corriente I2. La recta teóricamente pasa por el origen y que hemos marcado con 15% de los valores de la diferencia de corrientes para cualquier valor de la corriente I2 que mantienen el relevador sin operar. Si por ejemplo con la I 2=500 Amperes se tiene una diferencia mayor de 75 Amperes, es decir que caemos al punto A, los contactos permanecerán cerrados, pero en su límite y cualquier diferencia mayor para esta misma corriente por ejemplo 150 Amperes (punto B) hará trabajar al relevador. Cuando la diferencia está por debajo de esta recta de pendiente 15% por ejemplo en el punto C los contactos permanecerán cerrados y la bobina restrictora aumentara su esfuerzo por mantener la posición de no operación. En general para cualquier curva de pendiente determinada por el ajuste del relevador, si el punto que requiere las condiciones del sistema diferencialmente protegido no cae dentro de la recta, no opera el relevador, pero si cae dentro de la anterior cerrara los contactos y estos darán por resultado que en el circuito de apertura de uno de los varios interruptores del sistema opere y, que aíslen una falla en la parte encerrada por los transformadores de corriente que se instalan para este relevador. Las curvas verdaderas las publican los fabricantes de los relevadores y son parecidos a estos, sin embrago, siguiendo este principio y la construcción de sus elementos, ver la figura 4.20. 72 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 4.20 Curvas de relevadores. Los ejes se marcan en múltiplos de la mínima corriente de operación, o máxima corriente permisible de operación. Los relevadores diferenciales no necesitan tener características de tiempo retardado o tiempo inverso, como los de sobrecorriente u otros, y se construyen, cayendo dentro de la clasificación de relevadores instantáneos aun cuando hay unos más rápidos en su operación que otros. La razón para ser instantáneos, es que al proteger una zona completamente determinada y encerrada entre los transformadores de corriente detectores, no es necesario considerar secuencias de operación con respecto a otra parte del sistema y mientras más rápidamente se libre el equipo de una falla, menores efectos tendrá el deterioro de éste. Hay relevadores diferenciales que adicionalmente a su elemento normal, tienen uno que opera con corrientes muy altas, y que se designan como el elemento instantáneo de sobrecorriente, aun cuando ocurre en el interior del sector protegido por este sistema. 73 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CAPÍTULO V Protección de líneas de transmisión. 5.1 Causas de fallas en líneas de transmisión. El elemento más susceptible de fallas en una red eléctrica es la línea de transmisión, ya que está expuesta por su longitud a las condiciones climatológicas y ambientales. El 95% de las fallas ocurren de una fase atierra, bien por descargas atmosféricas o por problemas de aislamiento, contaminación, animales, hilos de guarda caídos y vandalismo. Los requerimientos para una protección de líneas son básicos: i. ii. iii. iv. Deberían ser selectivos, es decir, únicamente se librará el tramo de línea afectado por la falla. Deberán ser de operación rápida, de tal forma que los daños al equipo se reduzca al mínimo y se eviten problemas de estabilidad. Tendrán flexibilidad para que puedan seguir operando debidamente aun con cambios en la configuración del sistema de potencia. La impedancia de una línea de transmisión con determinadas características y configuración de los conductores, es proporcional a la longitud. Esta realidad ofrece la factibilidad del relevador de distancia. Para los propósitos específicos de la protección por relevadores las líneas de transmisión de potencia se clasifican como sigue: i. ii. iii. Líneas de distribución (que constituyen las redes de distribución) de 2.4 a 34.5 KV. Líneas de subtransmision, las que transmiten potencia a distancias relativamente cortas o bien interconectan áreas urbanas por lo que existe cierto traslape con las líneas de distribución ya que cubren de 13.8 hasta 115 KV. Líneas de transmisión, que se consideran a las que interconectan subestaciones importantes o partes de sistemas, razón por la que también existe cierto traslape con las líneas de subtransmision. Ya que cubren un rango de 69 hasta 800 KV, o tensiones superiores según sea el caso. La selección del esquema de protección más adecuado para la protección de una línea de transmisión se basa principalmente en los siguientes factores: i. Tipo del circuito a proteger, es decir: si es línea aérea o cable, si está constituido por una línea, doble circuito o dos líneas en paralelo, si tiene terminaciones múltiples en los puntos de llegada o salida, etc. 74 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” ii. Función de la línea y su importancia es decir su efecto en la continuidad del servicio, requerimientos reales y prácticos respecto al aislamiento de la falla con respecto del sistema. Compatibilidad con el equipo y resto de esquemas de protección del sistema. iii. A las tres consideraciones anteriores se deben agregar los aspectos de tipo económico así como el conocimiento y experiencia que se tenga del sistema en cuanto a su operación se refiere, y al cual se interconectará la línea o líneas de transmisión en proyecto. Como se podrá observar existen varios esquemas de protección y consideraciones para la selección de los mismos, razón por la cual no es posible dar reglas específicas para la protección de líneas de transmisión. La aplicación de los esquemas de protección se puede hacer en base de las características de los relevadores mismos, por lo que un enfoque de esta naturaleza permite dar cierta generalidad al problema. 5.2 Protección de líneas con relevadores de sobrecorriente. La protección de sobrecorriente es la más sencilla y la más económica, la más difícil de aplicar y la que más rápido necesita ajuste o reemplazo a medida que cambia el sistema. Se le utiliza en general de la siguiente forma: i. ii. Protección contra fallas de fase. Protección de fallas de tierra. Cuando menor es el cambio en la magnitud de la corriente de cortocircuito con cambios en la capacidad de generación conectada, para una falla en un punto dado, mayor será el beneficio que puede obtenerse de la mayor diversidad. En la protección de circuitos de distribución de servicio eléctrico, puede aprovecharse la máxima ventaja de la característica de tiempo inverso debido a que la magnitud de la corriente de falla depende, la mayoría de las veces de la localización de ésta y se mantiene prácticamente inafectada por cambios en la generación o en el sistema de transmisión de alta tensión. No solo por esta razón pueden utilizarse los relevadores con curvas extremadamente inversas sino que también proporcionan la mejor selectividad con fusibles y restauradores. Resumiendo podemos decir lo siguiente respecto a la aplicación de la característica de tiempo: i. Característica de tiempo inverso.- Se utiliza generalmente, con los mejores resultados, cuando la magnitud de la corriente de cortocircuito, 75 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” ii. iii. al ocurrir la falla, depende de gran parte de la capacidad de generación del sistema. Característica de tiempo muy inverso.- Se utiliza mas adecuadamente en sistemas donde la magnitud de la corriente de cortocircuito depende principalmente de la posición relativa respecto al punto donde se ha producido la falla y muy poco o casi nada de las características de generación del sistema. Características de tiempo extremadamente inverso.- Son excelentes para aplicaciones en las que se necesite suficiente retardo para permitir a un circuito recerrar una suma de cargas que han estado desconectadas sin disparos innecesarios durante el periodo de cierre y al mismo tiempo coordinar adecuadamente con fusibles. Los relevadores de sobrecorriente instantáneos se pueden aplicar si la magnitud de la corriente de falla bajo condiciones de máxima generación alcanza un valor aproximadamente el triple a medida que la falla se mueve desde el extremo lejano de la línea hacia la posición del relevador. Con la protección de sobrecorriente instantánea en ambos extremos de la línea, se obtiene el disparo simultáneo en éstos bajo condiciones de máxima generación, en las fallas en la parte media de la misma. La protección de sobrecorriente se hace direccional para simplificar el problema de obtener la selectividad cuando puede fluir la misma magnitud de la corriente de falla en cualquier dirección en la localidad del relevador. Todos los relevadores de sobrecorriente direccionales deberán tener la característica de control direccional, con lo cual la unidad de sobrecorriente no empieza a funcionar hasta que la unidad direccional lo hace para el flujo en la corriente en la dirección en la que deberá de funcionar la primera. Por lo general se prefieren relevadores direccionales de sobrecorriente monofásicos para protección contra fallas entre fases la razón principal es que la muy adecuada característica de “control direccional” se obtiene más sencillamente y con mayor seguridad con los relevadores direccionales de sobrecorriente monofásicos que con un polifásico direccional en combinación con monofásicos de sobrecorriente de tierra. Una ventaja menor de los relevadores monofásicos, es que estos proporcionan un poco de más de flexibilidad en la instalación de los tableros. La ventaja de un direccional polifásico es que esta menos expuesto que los monofásicos al mal funcionamiento ocasional. Para ciertas condiciones de falla, uno de los tres relevadores monofásicos puede desarrollar par en la dirección de disparo cuando éste pueda ser indeseable si la corriente de este relevador fuera bastante elevada para hacer funcionar la unidad de sobrecorriente, resultaría un disparo inadecuado. Ya que un elevador polifásico direccional funciona sobre el par neto de sus tres elementos, un par invertido en uno de 76 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” ellos puede equilibrarse por los otros dos, y por lo general resulta el par neto correcto. Bajo ciertas circunstancias, los relevadores monofásicos direccionales de sobrecorriente para la protección de falla de fase pueden originar el disparo innecesario en fallas a tierra en la dirección de no disparo. Las componentes de secuencia cero de la corriente de falla a tierra producen una tendencia hacia el mal funcionamiento. Todas estas corrientes están en fase, y cuando se utilizan transformadores de corriente conectados en estrella, siempre producen par de cierre de contacto en una de las tres unidades direccionales, independientemente de la dirección en que fluya la corriente. En general, las otras componentes de la corriente de falla son capaces de “ahogar” el efecto de las componentes de secuencia cero. Pero, cuando la corriente de falla se compone principalmente a base de la componente de secuencia cero, el mal funcionamiento es más probable. Figura 5.1 Esquema que muestra la probabilidad a que se produzca un disparo indeseado. En la figura 5.1 se muestra el tipo básico de aplicación en la cual hay mayor probabilidad a que se produzca el disparo indeseado. Supongamos que se aplican las unidades direccionales de los relevadores para permitir el disparo solo en fallas a la izquierda de la localidad del relevador, como se indica por la flecha. Sin embargo una falla a tierra a la derecha, como la mostrada, originará que por lo menos una unidad direccional cierre su contacto y permita el disparo por su unidad de sobrecorriente. Depende de sus ajustes de puesta en marcha (pick up) y de tiempo el que dicha unidad dispare en realidad su interruptor, y de si toma suficiente corriente para funcionar antes de que se retire la falla del sistema por algún otro relevador que se supone funcionara para esta falla. Para evitar el mal funcionamiento en la situación mostrada en la figura 5.1, debe impedirse que los relevadores de fase respondan a la secuencia cero, de la misma que utilice 3 transformadores de corriente auxiliares, como se muestra en la figura 5.2. Se hace hincapié en que el neutro de los relevadores 77 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” de fase no deberá conectarse al neutro de los transformadores de corriente pues puede perderse parte de la efectividad de la derivación. Figura 5.2 Esquema que muestra la compensación para evitar un disparo indeseado. Las unidades direccionales para relevadores de tierra pueden polarizarse de ciertas fuentes de corriente o de tensión de secuencia cero, o de ambas en forma simultánea. La figura 5.3 muestra un método para la obtención de la tensión de polarización del lado de baja tensión de un banco de transformadores de potencia con conexión Δ/Δ, que solo utiliza un transformador de potencial de alta tensión para establecer el neutro en el lado de baja. Figura 5.3 Esquema que muestra un método para la obtención de la tensión de polarización del lado de baja tensión. 78 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” La figura 5.4 muestra cómo puede obtenerse la corriente de polarización, a partir de la corriente del neutro puesto a tierra, de un banco trifásico de transformadores de potencia. Figura 5.4 Esquema que muestra cómo obtener la corriente de polarización, a partir de la corriente del neutro puesto a tierra. La corriente de polarización de los TC´s en paralelo en los neutros puestos a tierra de dos o más bancos de transformadores se considera bastante segura si los bancos tienen interruptores separados de tal manera que siempre estará en servicio un banco. Con un banco de transformadores de potencia de 3 arrollamientos λ/λ, los TC´s de polarización deberán ponerse en los neutros puestos a tierra de ambos arrollamientos en estrella, y conectados en paralelo. Las relaciones de estos TC´s deberán ser inversamente proporcionales a los valores nominales de la tensión en los arrollamientos en estrella. Como una alternativa a los TC´s del neutro con transformadores de dos o tres arrollamientos, puede utilizarse un solo TC en serie con uno de los arrollamientos en delta si estos no alimentan carga externa o no están conectados a una fuente de generación. Si hay conexiones externas a la delta, se requieren tres TC´s, uno en cada uno de los arrollamientos. Estos TC´s deberán ponerse en paralelo como se muestra en la figura 5.5. Como una segunda alternativa a los TC´s del neutro, se puede utilizar la corriente del neutro de los TC´s conectados en estrella, en serie con los arrollamientos en estrella, como se muestra en la figura 5.6. 79 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 5.5 Diagrama que muestra que los TC´s deben ponerse en paralelo. En un banco de de autotransformadores con un terciario en delta, puede emplearse cualquiera de las dos alternativas de los TC´s en el neutro. Por lo general no se permite utilizar un TC en el neutro porque puede invertirse la corriente en éste en una falla de baja tensión en comparación con la que se obtiene en el mismo para una falla es tal que puede utilizarse un TC en el neutro; sin embargo, debe tomarse en cuenta que las condiciones pueden cambiar a medida que se hacen los cambios del sistema. Figura 5.6 Diagrama que muestra que los TC´s deben ponerse en serie. El valor de la corriente primaria de un TC de neutro de arrollamiento delta utilizado para la polarización de las unidades direccionales de relevadores de tierra debe ser tal que las bobinas de polarización y funcionamiento de una unidad direccional tomen casi las mismas magnitudes de corriente para cualquier falla para las que deben operar. 80 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Se dispone de relevadores direccionales que están diseñados para polarización simultánea por tensión y corriente. Aparte de simplificar el problema del ahorro de existencias almacenadas de relevadores, la polarización doble, como se le llama, tiene ciertas ventajas funcionales. Algunas veces, no son satisfactorias la corriente o la tensión solas, debido a que cualquier fuente puede desconectarse alguna vez del sistema, con lo cual se deja sin uso cuando aún se le necesita. Con la doble polarización, puede desconectarse cualquier fuente en tanto se deja en servicio la otra. De otro modo, sea la tensión o la corriente de polarización, proporcionan está en forma débil, pero las dos juntas aseguran una polarización fuerte. Cuando no hay fuente de corriente o tensión de secuencia cero para la polarización de la unidad direccional de un relevador, es posible utilizar a menudo una unidad direccional de secuencia negativa, si se requiere protección de tierra separada. Sin embargo, se debe estar seguro de que se dispondrá de suficiente corriente y tensión de secuencia negativa, para garantizar la operación segura de dicha unidad para todas las condiciones en las que debe operar. En algunos sistemas que están puestos a tierra a través de impedancia, las cantidades de secuencia negativa pueden ser muy pequeñas. Otra ventaja de las unidades direccionales de secuencia negativa es que no están afectadas por la inducción mútua entre circuitos paralelos cuando ocurren fallas a tierra. A pesar de algunas ventajas que puede tener el relevador de secuencia negativa, solo se le utiliza como último recurso, debido a que el de secuencia cero es más fácil de probar, y porque produce un par más seguro en todas las condiciones en que es aplicable. En la práctica generalmente se utiliza un conjunto de dos o tres relevadores de sobrecorriente para la protección contra fallas entre fases y un relevador de sobrecorriente separado para las fallas a tierra. El problema de considerar si se emplea dos o tres relevadores de sobrecorriente para la protección contra fallas de fase, surge por un deseo de evitar el gasto de un TC y un relevador, o al menos del relevador, en ocasiones donde sólo puede tolerarse un gasto mínimo para la protección de una línea. La protección de sobrecorriente no direccional para fallas de fase puede proporcionarse por medio de dos relevadores alimentados por TC´s de dos o tres fases. Sin embargo no será posible proporcionarla si los TC´s en todos los circuitos no están localizados en las mismas fases como se muestra en la figura 5.7. Se supone que el sistema mostrado en la figura 5.7 no está aterrizado. Las fallas a tierra simultáneas en fases diferentes de dos circuitos distintos constituirán una falla de fase a fase en el sistema y no operará ningún relevador de sobrecorriente. 81 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Por otro lado si utilizamos únicamente dos transformadores de corriente, no podríamos lograr la protección completa contra fallas de fase y a tierra, ya que se logra si se utilizan tres transformadores de corriente con dos relevadores de fase y un relevador de tierra como se muestra en la figura 5.8. Si se utiliza la protección direccional de fases en dos fases únicamente en un sistema con neutro aterrizado, deben proporcionarse relevadores de tierra para la protección contra fallas a tierra. Si la magnitud de la corriente de falla para fallas de fase no es varias veces la magnitud de la carga, deberán utilizarse tres relevadores direccionales de sobrecorriente monofásicos para asegurar el disparo cuando se desee. Figura 5.7 Esquema que muestra la protección de sobrecorriente no direccional para fallas de fase Figura 5.8 Esquema que muestra la protección completa contra fallas de fase y a tierra. 82 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Si se usan solo dos relevadores direccionales de sobrecorriente, deberán disponerse en conexión en la cuadratura. En ésta asegura de uno de los dos relevadores que operará por debajo del límite de condiciones que existen cuando ocurren fallas cercanas a la localidad del relevador. Finalmente podemos decir que se utilizan 3 transformadores de corriente y 3 relevadores de fase siempre que sea justificable económicamente para evitar las dificultades anteriores, debido que al menos siempre operara un relevador para todas las fallas entre fases. El problema principal causado por los errores transitorios de los TC´s es su efecto sobre los relevadores de sobrecorriente de tierra rápidos y sensibles. Este transformador efecto, llamado “corriente residual falsa” consiste en el flujo de grandes corrientes transitorias a través de la bobina del relevador de tierra en el neutro de los TC´s, cuando no hay corriente de falla a tierra real en los primarios de los TC´s. Esto sucede porque los TC´s tienen errores diferentes debido a la componente de corriente directa en las corrientes primarias de falla, o debido a cantidades distintas de magnetismo remanente. Como consecuencia, si la corriente de falla a tierra está muy limitada por la impedancia del neutro y es necesario utilizar relevadores de tierra muy sensibles para detectar en forma segura las fallas a tierra, éstos deberán tener acción retardada o pueden funcionar en forma inadecuada en corrientes elevadas de fallas entre fases. La resistencia de arco es la oposición al paso de la corriente en el momento de producirse el arco. La resistencia de arco puede o no existir. En ocasiones, puede presentarse una falla metálica sin arco. Para corrientes debajo de los 1000 Amperes la fórmula: V 8750 / I 0.4 Da el valor máximo comunicado de volts (V) por pie para cualquier valor de la corriente eficaz de arco (I). Para tomar en cuenta el alargamiento del arco por el viento, puede utilizarse la fórmula aproximada: L 3vt Lo Donde: L Longitud del arco, en pies. v Velocidad del viento en millas por hora. t Tiempo después de que se inició el arco en segundos. Lo Longitud inicial del arco, esto es, la distancia mínima entre conductores o a través de un aislador (pies). 83 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” La resistencia de tierra es la resistencia en la tierra. Esta resistencia se agrega a la de arco. Cuando no se utilizan hilos de guarda, o cuando éstos están aislados de las torres o polos, la resistencia de tierra es la resistencia de la tierra de la torre en la localidad donde ha ocurrido la falla más la resistencia de la tierra de regreso a la fuente. En ocasiones, un conductor se rompe y cae a tierra. La resistencia de cont acto de tierra de una falla semejante puede ser mucho más elevada que la resistencia de tierra de las torres donde por lo general se obtiene resistencia relativamente baja con varillas de tierra o tomas de tierras equilibradas. La resistencia de contacto depende de la geología de una localidad dada, si la tierra es húmeda o seca, y si es seca, que tan elevada es la tensión; ésta toma una cierta cantidad de la tensión para perforar el aislamiento de la superficie. El “sobrealcance” es la tendencia de un relevador a ponerse en operación en las fallas a mayor distancia de la que se esperaría si se desprecia el efecto de la simetría de la corriente de falla. Los relevadores de atracción magnética son los más afectados por la asimetría de las fallas que los relevadores de inducción, y algunos de estos lo son más que otros. El sobrealcance en porcentaje es un término que describe el grado en el cual existe la tendencia, y se ha definido como sigue: ( A B) Sobrealcance en porcentaje 100 A Donde: A La corriente de puesta en trabajo (pick up) del relevador, en Amperes eficaces de estado estable. B Los amperes eficaces en estado estable que en cuanto se inicie la simetría total pondrán en operación el relevador. El sobrealcance en porcentaje aumenta a medida que se incrementa la relación de reactancia a resistencia de la impedancia que limita la corriente de falla, o bien, en otras palabras a medida que aumenta la constante de tiempo de la componente de CD de la corriente de falla. Cuanto más lento es el decaimiento de la componente de corriente directa más pronto originará la operación del elevador. Con lo anterior se hace evidente que, siendo iguales otras condiciones cuanto más rápido es un relevador, tanto mayor será su sobrealcance en porcentaje. A continuación se mencionan algunas recomendaciones para realizar un ajuste a estos relevadores: i. Para ajustar un relevador de fase debe calcularse una falla trifásica para las condiciones de corriente máxima. El ajuste para selectividad se hace suponiendo condiciones de corriente máxima de falla porque, si se obtiene selectividad para tales condiciones, es seguro que se obtendrá para corrientes menores. Sin embargo, un relevador de fase no debe ser 84 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” tan sensible como para ponerse en operación en condiciones de emergencia de máxima carga en la línea de la que recibe su corriente. ii. Para relevadores cercanos a una gran central generadora que proporciona la mayor parte de la corriente de cortocircuito la impedancia síncrona, la mejor para la determinación de la puesta en marcha (pick up) de un relevador cuyo objetivo es el respaldo especialmente si el tiempo de operación del relevador fuera tanto como uno o dos segundos. Por otra parte la puesta en marcha del relevador de alta velocidad cercano a dicha central generadora se determinaría por la utilización de la impedancia transitoria, y aún la subtransitoria. Sin embargo, por lo general, se encontrará más adecuada la impedancia transitoria para todo propósito. Por otro lado cuando interesa conocer el valor máximo posible de la corriente de falla no se debe tomar en cuenta la resistencia d arco. iii. Para utilizar la parte más inversa de las curvas de tiempo del relevador, la puesta en trabajo (pick up) en función de la corriente primaria deberá ser tan elevada como sea posible y también ser aun bastante baja como para que el relevador funcione en forma segura bajo la condición de corriente mínima de falla. En dichas condiciones, el relevador deberá funcionar a no menos de 1.5 veces la puesta en trabajo (pick up). La razón para esta regla es que, cuanto más cercana es a la corriente (pick up) el par es tan lento que un pequeño aumento de la fricción podría impedir el funcionamiento o podría aumentar demasiado el tiempo de operación. iv. Cuando se está seleccionando la puesta en trabajo (pick up) de relevadores de tiempo inverso, si deberá considerarse el efecto de la resistencia de arco. v. Deben evitarse los relevadores con características diferentes. vi. La puesta en trabajo del relevador instantáneo se muestra en la figura 5.9 que es 25% más elevada que la magnitud de la corriente para una falla trifásica en el extremo lejano de la línea; el relevador no deberá ponerse en marcha con una corriente mucho menor de otro modo este podría sobrealcanzar el extremo de la línea cuando la onda de la corriente de falla está completamente asimétrica, en las condiciones de la figura 5.9 se notara que el relevador operara con fallas trifásicas exteriores hasta el 70% de longitud de la línea y para fallas de fase a fase exteriores hasta el 54%. vii. El sobrealcance máximo de un relevador que fuera lo bastante rápido en porcentaje sería 50% y 42% para relevadores que no son muy rápidos. Cuando no se dispone de los datos del sobrealcance en porcentaje, será suficiente por lo general ajustar la puesta en trabajo 25% más elevada que el valor máximo de la corriente de falla simétrica en la cual el relevador no debe funcionar. 85 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 5.9 Puesta en trabajo del relevador instantáneo. Ahora se dan unas recomendaciones para los relevadores de tierra: i. Para ajustar un relevador de tierra debe calcularse una falla de fase a tierra para las condiciones de máxima generación; la corriente de carga no es un factor en la selección de la corriente de pick up de un relevador de tierra, excepto en un sistema de distribución donde por lo general hay corriente de tierra debido a la carga desequilibrada. ii. Si hay dos o más secciones de líneas adyacentes, deberá suponerse la falla en el extremo de la sección que origina el flujo de la corriente mínima en la localidad del relevador que va ajustarse. iii. La resistencia de tierra solo nos interesa en las fallas a tierra, esta se agrega a la resistencia de arco. iv. Para relevadores de tierra en líneas entre las que hay inductancia mutua ésta deberá tomarse en cuenta en el cálculo de la magnitud de corriente en las fallas monofásicas a tierra. Para la coordinación de los relevadores de sobrecorriente en circuitos radiales, el primer paso es seleccionar la puesta en trabajo del relevador de tal manera que éste (1) funcione con todos los cortocircuitos en su propia línea y (2) proporcione protección de respaldo para los cortocircuitos en los elementos del sistema inmediatamente adyacentes, bajo ciertas circunstancias, por ejemplo, si el elemento adyacente es una sección de línea, el relevador se ajusta para ponerse en trabajo con una corriente algo menor que la que recibe por un cortocircuito en el extremo lejano de esta sección de línea en condiciones de máxima generación. Ésta se muestra en la figura 5.10. Figura 5.10 Esquema que muestra un sistema radial con una falla. 86 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Para asegurar la selectividad bajo todas las circunstancias la puesta en trabajo (pick up) de un relevador dado deberá ser algo más elevada que la de otros relevadores más cercanos a la falla y con los que debe ser selectivo el relevador dado. El segundo paso en el ajuste de los relevadores de sobrecorriente de tiempo inverso es ajustar la acción retardada para obtener selectividad con los relevadores de los elementos inmediatamente adyacentes del sistema. Este ajuste deberá hacerse para las condiciones de flujo de máxima corriente en la localidad del relevador. Para la falla tal como se muestra en la figura 5.10, el relevador localizado en el interruptor 2 debe cerrar sus contactos, y el interruptor 2 debe disparar e interrumpir el flujo de la corriente de cortocircuito antes de que el relevador en el interruptor 1 pueda cerrar sus contactos. Además ya que el relevador en el interruptor 1 puede “sobrecorrer” un poco después de que cesa el flujo de la corriente de cortocircuito, deberá hacerse también una previsión para esta sobrecarrera. Podemos expresar el tiempo de funcionamiento del relevador requerido en 1 en función del tiempo de funcionamiento del relevador en 2 por la siguiente fórmula: T1 T2 B2 O1 F Donde: T1 Tiempo de funcionamiento del relevador 1. T2 Tiempo de funcionamiento del relevador 2. B2 Tiempo de interrupción de la corriente de cortocircuito del interruptor 2. O1 Tiempo de sobrecarrera del relevador 1. F Tiempo del factor de seguridad. El tiempo de sobrecarrera para los tipos de tiempo inverso utilizados generalmente puede suponerse un valor de 0.1 segundos. En general será suficiente un valor de 0.2 a 0.3 segundos, para la sobrecarrera más el factor de seguridad. “Intervalo de tiempo selectivo” es la suma de los tiempos del interruptor, sobrecarrera, y el factor de seguridad. Figura 5.11 Esquema de un sistema radial con tiempos de operación. 87 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Para casos como el mostrado en la figura 5.11, podemos generalizar y afirmar que el ajuste debe iniciarse en el relevador eléctricamente más distante de la fuente de generación y trabajar entonces de regreso hacia dicha fuente. Ahora consideramos el siguiente procedimiento para la coordinación de un sistema en anillo como el mostrado en la figura 5.12, es el mismo que el que se siguió para circuitos radiales. El orden en que se ajustaran los relevadores “que ven” una trayectoria alrededor del anillo es 1-2-3-4-5, y viendo la otra trayectoria, a-b-c-d-e. Por lo general, se emplearían relevadores direccionales de sobrecorriente como se indica por las flechas de una punta que señalan en la dirección del flujo de la corriente de falla para la que debería disparar el relevador. Solamente los relevadores en e y 5 pueden ser o no direccionales como se muestra por las flechas de dos puntas. El relevador 1, por ejemplo, debe recibir como mínimo 1.5 veces su corriente de puesta en trabajo para una falla de fase a fase en el extremo lejano de su línea con el interruptor e abierto y con mínima generación. Figura 5.12 Esquema que muestra un sistema en anillo. La primera complicación en el ajuste de relevadores de sobrecorriente en circuitos en anillo surge cuando los generadores están localizados en varias estaciones alrededor del anillo. El problema es entonces dónde empezar. Y en fin, cuando los circuitos de un anillo forman parte de otros anillos, el problema es más difícil. El método de tanteos es el único camino para proceder con dichos circuitos. La experiencia ha demostrado que del 70% al 95% de todas las fallas de líneas de transmisión, subtransmision y distribución de alta tensión no son permanentes si se desconecta del sistema en forma rápida el circuito defectuoso. Esto se debe a que la mayor parte de las fallas de las líneas son originadas por las descargas atmosféricas, y si se evita que el arco que sucede en la falla dure mucho tiempo como para dañar en forma perjudicial conductores y aisladores, la línea puede regresar al servicio en forma inmediata. El recierre automático se aplica por lo general a todos los tipos de circuitos. Las líneas de subtransmisión que tienen protección de sobrecorriente tienen por lo 88 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” general equipo de recierre múltiple, con un equipo suplementario de “comprobación de sincronismo” en un extremo. El equipo de comprobación de sincronismo es un equipo de relevadores que permite cerrar un interruptor sólo si las partes que van a conectarse por éste están en sincronismo. En líneas radiales no se requiere este equipo. En sistemas de distribución en los que se incluye la selectividad con fusibles de circuitos derivados, también se utiliza el recierre múltiple. Los relevadores de sobrecorriente instantáneos y de tiempo inverso están arreglados de tal forma que, cuando ocurre una falla, el relevador instantáneo funciona para disparar el interruptor antes de que pueda quemarse un fusible de un circuito derivado, y se cierra entonces en forma inmediata al interruptor. Sin embargo, después de la primera salida, los relevadores instantáneos salen de servicio en forma automática, de tal manera que si la falla persistiera los relevadores de tiempo inverso tendrían que funcionar para disparar el interruptor. Esto da tiempo para que se queme el fusible del circuito derivado del circuito defectuoso, si suponemos que la falla está más allá de este fusible. En esta forma, se disminuye el costo del reemplazamiento de los fusibles quemados del circuito derivado. 5.3 Protección de líneas con relevadores de distancia. A medida que las redes eléctricas aumentan de tamaño y consecuentemente de complejidad, los Esquemas de Protección de sobrecorriente con selección de tiempo resultan inadecuados por requerirse ajustes demasiado altos en los relevadores que quedaron en los últimos escalones. Debido a lo anterior se diseñaron y construyeron los relevadores de distancia cuyo principio de operación es tal que su tiempo de diseño es proporcional a la distancia que se produce la falla. Los relevadores utilizados para protección de cortocircuitos funcionan en virtud de la corriente y/o tensión proporcionada a éstos por los transformadores de corriente y tensión, conectados en diversas combinaciones al elemento del sistema que se va a proteger. En relevadores de distancia hay un equilibrio entre la tensión y la corriente que se expresa en función de la impedancia. La impedancia es una medida eléctrica de la distancia a lo largo de la línea de transmisión lo que explica el nombre aplicado a ese grupo de relevadores. Hablando sobre el relevador de distancia de impedancia, el término Impedancia puede aplicarse solo a la resistencia, solo a la reactancia, o a la combinación de los 2, en protección el relevador de impedancia tiene una característica diferente del relevador que responde a cualquier componente de impedancia. 89 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” El elemento de corriente produce par positivo (puesta en servicio del relevador) mientras que el elemento de tensión produce par negativo (reposición). La ecuación del par es: T K1 I 2 K 2V 2 K 3 Donde I y V son magnitudes eficaces de la corriente y de la tensión y K 3 el efecto del resorte de control. Cuando el par neto es cero se tiene: 0 K1 I 2 K 2V 2 K1 I 2 K3 2 2 K3 K2I 2 K1 I K2I 2 V Z2 V I K1 I 2 K2I 2 Z K 2V 2 K 3 , despejando y dividiendo entre K 2 I 2 K3 K2 I 2 Despreciando el efecto del resorte de control ya que su efecto sólo es notorio a magnitudes de corriente relativamente bajas. Z V I K1 K2 constante Lo anterior nos indica que un relevador de impedancia está en el límite de funcionamiento a un valor constante dado por la relación de V a I que es una impedancia. Su característica se indica en la figura 5.13. Figura 5.13 Característica de funcionamiento de un relevador de impedancia. 90 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Otra forma más común que la anterior es de mostrar la característica de funcionamiento del relevador de distancia es por medio del diagrama de impedancia o diagrama R-X. Ver figura 5.14. En este diagrama el valor numérico de la relación de V a I se muestra como una longitud de un radio vector Z y ángulo de fase θ entre V e I determina la posición. Si la I está en fase con la V el vector se sitúa en el eje +R; si está 180° fuera de fase con V el vector se sitúa en el eje –R; si I se atrasa de V el vector tiene I componente +X y si la I se adelanta de V, el vector tiene una componente –X. Figura 5.14 Característica de funcionamiento de un relevador de impedancia de un diagrama R-X. Cualquier valor de Z menor que el radio del círculo resultara en un par positivo y cualquier valor de Z mayor que este radio tendrá par negativo haciendo caso omiso del ángulo de fase entre V e I. El principio de operación de los relevadores de distancia lo rige la relación o el cociente entre el voltaje y la corriente en el punto de ubicación del relevador, es decir que es: V Z I La impedancia de la línea hasta el punto de falla. En una línea de transmisión la impedancia es proporcional a la distancia, por lo tanto el relevador recibe el nombre de distancia. Una forma de ilustrar el concepto de impedancia que detecta el relevador hasta el punto de falla se indica en la figura 5.15. Se considera que el relevador está conectado al bus A y sus bobinas reciben las señales del V que es proporcional al de la falla y la corriente I F que es la de la falla, el relevador opera debajo de un cierto valor Z=V/I lo que hace básicamente un relevador de distancia es comparar la corriente y el voltaje del sistema de potencia para determinar si la falla se presentó dentro o fuera de su zona de operación. 91 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 5.15 Esquema que ilustra el concepto de impedancia que detecta el relevador hasta el punto de falla. La protección de líneas de transmisión, un relevador de distancia monofásico del tipo de impedancia de alta velocidad y una unidad de tiempo, junto con los indicadores comunes (banderas) unidad de sello y otros auxiliares. En la figura 5.16 se muestra un circuito esquemático. Figura 5.16 Conexiones esquemáticas de los contactos de un relevador de distancia del tipo de impedancia. Las tres unidades de impedancia están rotuladas Z 1, Z2 y Z3 las características de funcionamiento de estas 3 unidades son ajustables independientemente. En la figura 5.17 del diagrama R-X el círculo para Z 1 es el más pequeño y el circulo Z3 el más grande, el circulo para Z2 es intermedio, por tanto es evidente que cualquier valor de impedancia que este dentro del circulo Z 3 origina que las 3 unidades de impedancia. Figura 5.17 Esquema que muestra en el diagrama R-X las impedancias. 92 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” La unidad direccional sólo permite el disparo en su región positiva de par, las partes inactivas de las características de la unidad de impedancia se muestran punteadas, resultando que el disparo ocurrirá solo para puntos que estén dentro de los círculos y arriba de la unidad direccional. La unidad direccional que se muestra en el diagrama R-X tiene una característica de funcionamiento de línea recta, solo si se desprecia el efecto del resorte de control que es suponer que no hay par de retención. Si se desarrolla la característica de funcionamiento de un relevador direccional cuando se toma en cuenta el efecto del resorte de control nos describe una condición como la mostrada en la figura 5.18 dando una serie de círculos uno para cada valor de V. Figura 5.18 Las características de un relevador direccional para un valor de la tensión. Viendo la aplicación de los relevadores de distancia para protección de líneas de transmisión, se muestra el tiempo de funcionamiento contra la característica de impedancia que es conocida como tiempo-impedancia escalonada. Las unidades Z1 y Z2 proporcionan la protección primaria para una sección de una línea de transmisión, mientras que Z2 y Z3 proporcionan la protección de respaldo para barras colectoras y secciones de líneas adyacentes. El relevador de distancia del tipo impedancia modificado es igual al relevador de tipo impedancia, excepto que las características de funcionamiento de la unidad de impedancia están desplazadas como se muestra en la figura 5.19. Este desplazamiento se lleva a cabo por una corriente de polarización, la que consiste de a introducción en la tensión de alimentación de una tensión adicional proporcional a la corriente que da una ecuac ión de: T K1 I 2 K 2 (V CI ) 2 lo anterior nos da círculos con centros desplazados del origen y por cualquier cantidad deseada aun cuando el origen está fuera del círculo. 93 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Figura 5.19 Esquema que muestra el desplazamiento de la unidad de impedancia. La unidad de reactancia de un relevador de distancia del tipo de reactancia tiene, de hecho un elemento de sobrecorriente que desarrolla un par positivo y un elemento direccional corriente-tensión que se opone o ayuda al elemento de sobrecorriente según sea el ángulo de fase entre la corriente y la tensión. T K1 I 2 K 2VIsen K3; ( positivo cuando I se atraza de V). Cuando el par neto es cero se tiene: K1 I 2 K1 K 2VIsen K2 V sen I2 K 3 ; dividiendo entre I 2 se tiene que : K3 I2 V sen Zsen X I K3 K1 X ; despreciando el efecto del resorte tenemos que : K2 K2I 2 X K1 K2 constante Figura 5.20 Característica de funcionamiento de un relevador de reactancia. 94 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” En otras palabras, este relevador tiene una característica de funcionamiento tal como se muestra en la figura 5.20. Un relevador de distancia del tipo reactancia para protección de líneas de transmisión no podrá utilizar una unidad direccional sencilla, porque el relevador de reactancia disparará bajo condiciones normales de carga, por lo anterior se tiene una unidad que es conocida por relevador o unidad de admitancia ó Mho, cuya característica se muestra en la figura 5.21. Figura 5.21 Característica de funcionamiento de un relevador direccional con tensión de retención. A continuación en la figura 5.22 el relevador de reactancia completo con las diversas unidades, se observa que la unidad direccional o de arranque tiene doble utilidad no solo proporciona dirección sino también un tercer escalón de la medición de la distancia. Figura 5.22 Característica de funcionamiento de un relevador de distancia tipo de reactancia. En cuanto al relevador de distancia del tipo Mho su unidad es igual a la unidad de arranque del relevador de reactancia, este relevador completo para la 95 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” protección de líneas de transmisión está compuesto de 3 unidades Mho de alta velocidad M1, M2, M3 y una unidad de tiempo similar a la que se mostró para un relevador de distancia del tipo impedancia, excepto que no se requiere unidad direccional separada ya que las unidades Mho son inherentemente direccionales, la característica de funcionamiento del relevador completo se muestra en la figura 5.23. Figura 5.23 Característica de funcionamiento de un relevador de distancia del tipo Mho. Algunas consideraciones generales sobre los relevadores de distancia son las siguientes: Sobrealcance: cuando ocurre un cortocircuito, la onda de la corriente está propensa a descentrarse inicialmente, bajo estas condiciones los relevadores tienden al Sobrealcance, esto es a funcionar para un valor mayor de impedancia que para el que están ajustados para funcionar en estado estable. Esta tendencia es mayor cuanto más inductiva es la impedancia. También es mayor la tendencia en relevadores del tipo de atracción electromagnética que en los de inducción. La compensación para el sobrealcance, lo mismo que para, imprecisiones en TC y TP se obtiene por el ajuste de los relevadores para funcionar en 10% a 20% menos de impedancia que aquella para la cual se ajustarían en estado estable. El significado de Z: para la protección de líneas de transmisión contra cortocircuito, que es el campo más amplio de aplicación de los relevadores de distancia ésta impedancia es proporcional, dentro de ciertos límites a la distancia física del relevador al cortocircuito, sin embargo el relevador estará aún alimentado por tensión y corriente bajo otras condiciones distintas que los cortocircuitos, como cuando un sistema está conduciendo carga normal o cuando una parte de este pierde el sincronismo con la otra, etc. 96 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Se puede pensar que hay diferentes tipos de relevadores de distancia para protección de líneas de transmisión y que cada tipo tiene ampliamente su campo de aplicación particular en donde resulta más apropiado. Para suponer el trazo de la característica de un relevador en el trazo de la característica de un sistema, ambos trazos deben estar hechos con las mismas bases. Un relevador funciona en respuesta a la tensión y corriente obtenida de ciertas fases, por lo tanto, deben tratarse las características del sistema en función de estas mismas magnitudes. Si se utilizan ohms reales, ambas características, deben estar en una base primaria o secundaria tomando en cuenta las relaciones de los TC y TP como sigue: Ohms secundarios Ohms primarios RTC RTP Es conveniente que ambas coordenadas tengan la misma escala porque ciertas características son circulares si las escalas son las mismas. Es necesario establecer una conversión de las características relevadorsistema en el diagrama R-X, es decir que una condición del sistema que requiere el funcionamiento del relevador, debe estar situada en la región de funcionamiento del relevador. La conversión consiste: tomando como referencia la figura 5.24. Figura 5.24 Esquema de referencia. CONDICIÓN SIGNO DE "R" SIGNO DE "X" Potencia (W) de A a B ± Potencia (W) de B a A Potencia reactiva (VAR) atrasada de A a B + Potencia reactiva (VAR) atrasada de B a A Potencia reactiva (VAR) adelantada de A a B Potencia reactiva (VAR) adelantada de B a A + 97 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Las siguientes relaciones dan los signos numéricos de R y X par una condición trifásica: R V 2W ; W 2 (VAR) 2 X V 2 (VAR) W 2 (VAR) 2 V= voltaje de fase a fase. W= potencia trifásica. VAR= potencia reactiva trifásica. R y X= componentes de secuencia positiva en condiciones trifásicas balanceadas, dividiendo el voltaje de fase a neutro entre la I correspondiente. Lo anterior nos proporciona la localización de un punto en el diagrama R-X, es decir la impedancia para cualquier condición trifásica equilibrada del sistema. 5.4 Protección de líneas con relevadores piloto. Un requerimiento fundamental que deben cumplir las protecciones de las líneas de enlace en un sistema eléctrico de potencia es lograr el disparo simultáneo con alta velocidad de los interruptores de todos los terminales de la línea para todos los cortocircuitos internos. Las protecciones direccionales de sobrecorriente y de distancia solamente cumplen este requerimiento para los cortocircuitos en la porción central de la línea, pero para fallas cercanas a sus terminales la protección opera con alta velocidad, mientras que las de las restantes terminales (en el caso general de una línea multiterminal) operan con retardo de tiempo (a menos que las condiciones del sistema sean tales, que ocurra el disparo secuencial es decir, la aceleración de la operación de las protecciones remotas después del disparo de la protección cercana a la falla). La protección piloto constituye la solución de este problema, al garantizarse el disparo simultáneo con alta velocidad de todos los interruptores de la línea, se obtienen las siguientes ventajas: a) Mejoramiento de la estabilidad transitoria. b) Posibilidad de aplicar el recierre automático de alta velocidad, que si es exitoso mejora la estabilidad transitoria, reduce los tiempos de interrupción y mejora las condiciones de voltaje en parte de la carga. c) Reducción de la posibilidad de daño de conductores y equipos debido a la corriente de falla. La protección tipo piloto tiene selectividad absoluta y basa su funcionamiento en la comparación directa o indirecta de las señales provenientes de todos los terminales de la línea de transmisión. En la figura 5.25 se ilustra la necesidad de esta comparación para lograr la protección de alta velocidad para cortocircuitos en cualquier punto de la línea. Si la protección de la línea ubicada en el extremo A de la línea de transmisión, recibe información correspondiente a ese terminal solamente (protección direccional de sobrecorriente o de distancia), resulta prácticamente imposible que sea capaz de discriminar 98 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” correctamente entre los cortocircuitos F´ y F´´, que ocurren en puntos muy cercanos entre si y por tanto dan lugar a valores muy semejantes de la corriente o de la impedancia medida por la protección 1, sin embargo, estos dos cortocircuitos representan condiciones muy diferentes cuando la información se recibe en el extremo B de la línea, ya que hay una variación de aproximadamente 180° en el ángulo de la corriente de uno a otro caso. Figura 5.25 Fundamentación de la necesidad de la protección piloto de una línea de transmisión. En la protección tipo piloto la protección 1 recibe información desde las subestación B, que define la ubicación precisa del cortocircuito, con lo que se puede decir si se origina o no el disparo instantáneo del interruptor de este terminal de la línea de igual forma la protección 2 recibe información desde la subestación A. De lo anterior se deduce la necesidad de disponer de un canal de comunicación que enlace los terminales de la línea, este canal, también denominado canal piloto en la literatura especializada, es el da nombre a este tipo de protección. Existen en la actualidad 4 tipos de canales de comunicación factibles de utilizar con esta finalidad: a) Un par de conductores complementarios tendidos a lo largo de la línea protegida (hilo piloto), b) un canal de onda portadora de alta frecuencia, que utiliza los propios conductores de la línea protegida, c) un canal de enlace por radio en la banda de microondas, d) un cable de fibra óptica. De acuerdo con el canal de comunicación utilizado, las protecciones tipo piloto se subdividen en: a) Protección por hilo piloto (incluye la variante de fibra óptica) b) Protección piloto por onda portadora. c) Protección piloto por microonda. Una segunda posibilidad de clasificación de las protecciones tipo piloto es atendiendo al principio de detección del circuito. Pueden en general establecerse las siguientes comparaciones entre las señales provenientes de los terminales de la línea protegida: a) Comparación directa de los valores instantáneos de las corrientes (protecciones diferenciales de corriente) o de sus fases (protecciones diferenciales de fase de corriente o por comparación de fase). b) Comparación indirecta de las direcciones relativas de las corrientes o de las potencias, a partir de la operación de relevadores direccionales o de distancia (protecciones por comparación direccional). 99 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” En la práctica no se han utilizado todas las variantes posibles de comparación en cada uno de los tipos de protecciones pilotos. En la protección por hilo piloto se utiliza preferentemente el principio diferencial de comparación directa de los valores instantáneos de las corrientes. En las protecciones piloto por onda portadora y por microonda, por el contrario, han encontrado mayor aplicación los principios de comparación directa de fase (o protección diferencial de fase) y de comparación indirecta direccional. El canal de hilo piloto consiste en un par de conductores, generalmente de tipo telefónico, por los que la información puede transmitirse mediante señales de corriente directa (actualmente en desuso), de corriente alterna de frecuencia del sistema (50 a 60 Hz, según el caso), que es la variante más difundida, o de corriente alterna de una frecuencia del orden de 1000 a 3000 Hz (tonos de audio). Estos conductores deben ser subterráneos para garantizar un adecuado nivel de fiabilidad canal, no es recomendable utilizar conductores aéreos con esta finalidad, aunque esta variante se aplica en la práctica. Existen valores límites admisibles de la resistencia serie y capacidad paralelo del hilo piloto, aunque se dispone de medios para compensar parcialmente los efectos de estos parámetros sobre el funcionamiento del canal, ellos constituyen restricciones a la longitud del canal y el calibre mínimo de conductor a utilizar. No es recomendable la aplicación de la protección por hilo piloto en líneas de longitudes superiores a unos 25Km. Un problema que se confronta en este tipo de canal de comunicación es el de los sobrevoltajes, que están determinados por dos causas fundamentales. Una de ella es la inducción electromagnética entre los conductores piloto y la línea de transmisión. En este caso la situación más crítica es la de los cortocircuitos a tierra, en que la corriente de secuencia cero puede inducir valores altos de voltaje. Si los conductores se disponen trenzados, en ambos se inducen voltajes prácticamente iguales, por lo que entre ellos no aparecen grandes diferencias. Sin embargo, los valores de este potencial con respecto a tierra pueden ser altos, y deben tratar de reducirse. La variante más común a este fin consiste en apantallar el par trenzado de conductores con cubierta metálica, que se pone a tierra de la subestación. Cuando ocurre un cortocirc uito a tierra, la corriente que circula por el apantallamiento tiene un sentido tal, que reduce el campo magnético asociado con la corriente de cortocircuito, un buen apantallamiento puede reducir el sobrevoltaje por inducción electromagnética a menos de la mitad de su valor posible. La segunda causa de sobrevoltaje es la elevación que experimenta el potencial de la malla de tierra de la subestación cuando ocurre un cortocircuito a tierra en la línea, debido a la circulación de parte de la corriente de retorno por tierra a través del paso resistivo existente entre la tierra remota y la malla de tierra. En subestaciones con altos niveles de cortocircuito a tierra la elevación de este potencial puede ser considerable, y ello hace precisamente recomendable que 100 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” el apantallamiento del hilo piloto se aísle de la malla de tierra (si se conecta también a esta, las corrientes circulares resultantes del sobrevoltaje pueden incluso dañarlo). El sobrevoltaje aparece, por tanto, entre los conductores de hilo piloto y su apantallamiento, que está conectado a la tierra remota. Es conveniente que el aislamiento de los conductores sea capaz de soportar este sobrevoltaje, y en caso contrario hay que disponer de una protección especial contra el mismo. Para garantizar la seguridad del personal y de los equipos conectados al canal, es necesario instalar dispositivos especiales de protección contra los dos tipos de sobrevoltaje anteriormente mencionados, la operación de estos dispositivos no deben afectar el funcionamiento normal de la protección por hilo piloto. Adicionalmente es necesario brindar protección contra sobrevoltajes por descargas atmosféricas o por contactos con circuitos de potencia, en cuyo caso no se considera indispensable garantizar el buen funcionamiento de la protección piloto. El aseguramiento de niveles altos de fiabilidad en la protección implica la necesidad de supervisar ininterrumpidamente el estado del canal. Por ello se utilizan equipos de supervisión, que comprueban el estado del piloto inyectando en este una corriente directa, y permiten detectar cortocircuitos, circuitos abiertos o contactos con tierra. El canal de onda portadora se basa por lo general en la utilización de los propios conductores de la línea protegida para transmitir señales en la banda de frecuencia comprendida entre 30 y 300 KHz. La variante más difundida en la práctica es aquella en que se utiliza una sola fase de la línea, y la señal se aplica entre esa fase y tierra, otras variantes involucran dos o las tres fases, y requieren más equipos. La señal de onda portadora transmitida puede ser de una frecuencia única, de las frecuencias (sistema de corrimiento de frecuencia), o de modulación por simple banda lateral. La señal de frecuencia única es siempre de bloqueo, el sistema de corrimiento de frecuencia puede utilizarse para bloqueo o para disparo transferido, en el sistema de simple banda lateral la señal de alta frecuencia es modulada por tonos de audio portadores de la información. En la figura 5.26 se presenta el esquema general del canal de onda portadora de una fase de una línea de transmisión. El canal está formado por los conductores de la línea protegida (las tres fases participan en la propagación de la señal aun cuando esta se aplique a una sola fase), las trampas de onda (1), los capacitores de acoplamiento (2), los reactores de drenaje (3), los sintonizadores (4) y los transmisores-receptores (5). En la figura se muestran también los relevadores de protección, representados por bloques (6). La conexión entre los transmisores-receptores y los sintonizadores se hace mediante cables coaxiales. 101 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Las trampas de onda son circuitos resonantes paralelos que constituyen pasos de alta impedancia a la señal de radiofrecuencia, y de baja impedancia a la señal de frecuencia de potencia. Su funciones evitar las pérdidas de señal de onda portadora hacia las barras de la subestación adyacente, lo que reduce la señal en la dirección deseada y origina interferencia en los canales de onda portadora cercanos. Figura 5.26 Esquema que muestra el esquema general del canal de onda portadora de una fase de una línea de transmisión. Las trampas también evitan que las fallas externas a la línea protegida constituyan cortocircuitos para las señales de onda portadora de la línea. Las trampas de onda se diseñan para permitir continuamente la circulación de la corriente normal de la línea con pérdidas reducidas, y para soportar la máxima corriente de cortocircuito de la línea. Existen distintos tipos de trampa de onda, que pueden sintonizarse a una o dos frecuencias, o a toda banda de frecuencias. La señal de radiofrecuencia generada por cada transmisor-receptor se aplica a la línea de capacitores de acoplamiento, compuestos por un conjunto de capacitores en serie, montados dentro de un aislador de porcelana. Los sintonizadores, que por lo general están situados en la base de los capacitores de acoplamiento, garantizan la adaptación de impedancia entre el cable coaxial de la salida de los transmisores-receptores y la línea de transmisión, cada sintonizador conforma con el capacitor de acoplamiento un filtro pasa banda, que puede estar sintonizado a una, o toda una banda de frecuencias de la señal de onda portadora. Por otra parte, los capacitores de acoplamiento presentan una impedancia muy alta a la señal de frecuencia de potencia (50 o 60 Hz) de la línea de transmisión. Las líneas aéreas de transmisión tiene impedancias características del orden de 200 a 500 ohm de fase a tierra, el canal de onda portadora hace la adaptación a esta impedancia para obtener la condición de máxima transferencia de potencia a la radiofrecuencia. Las derivaciones y otras 102 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” discontinuaciones de la línea de transmisión pueden dar lugar a grandes pérdidas de señal. La aplicación de los sistemas de onda portadora a los cables de potencia es prácticamente imposible, debido a que tienen valores bajos de impedancia característica y perdidas mucho mayores que las de las líneas aéreas. En los canales de onda portadora es de gran importancia mantener la atenuación de la señal, en niveles aceptables la atenuación tiene lugar en todos los elementos del canal, y especialmente en la línea de transmisión, y depende de un gran número de factores. La atenuación de la señal constituye uno de los parámetros fundamentales a la máxima longitud de línea utilizable como canal de onda portadora, estos canales se ven afectados por ruidos o interferencias de distintos tipos que también afectan la longitud admisible en la línea, al imponer un límite a la atenuación del canal. Como fuentes de ruidos están la propia línea (efecto corona, arco del cortocircuito o de los desconectivos del aire, operación de interruptores, etc.) y factores externos, tales como canales cercanos de radiofrecuencia, descargas eléctricas, atmosféricas o estaciones de radio. El canal de microondas consiste en un alcance por radio en la banda de microonda usualmente en el intervalo de frecuencia de 2 a 12 GHz, con antenas entre las que debe existir un enlace “visual” directo. Cuando no se dispone de estaciones repetidoras la máxima longitud del canal es de unos 60 Km. La información puede transmitirse por el canal de dos formas. En una de ellas un tono de audio o una señal de una frecuencia que oscila entre la de audio y varios cientos de KHz modulada directamente la frecuencia de microonda (modulación de banda base). Cuando se requieren más canales se utiliza la segunda forma, en que se aplican directamente a un canal de voz de tonos de audio en el intervalo de frecuencias de 400 a 3000 Hz, este canal de voz es una señal de frecuencia comprendida entre audio y varios cientos de KHz, que modula la frecuencia de microonda. El canal de microonda es independiente de la línea protegida, por lo que las señales no son afectadas por los cortocircuitos y las interferencias asociadas con ellos. Tiene también la ventaja de que admite muchos canales de banda ancha, esto hace que, una vez establecido el enlace de microonda, la adición de nuevos canales no implica un costo elevado. Los sistemas de protección piloto que utilizan los canales de onda portadora y de microonda se basan por lo general en los principios de detección del cortocircuito, que son esencialmente los de comparación de fase y comparación direccional, por lo que para su estudio no establece operación. De hecho, los equipos de protección de un principio de operación dado pueden aplicarse a uno u otro canal. 103 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” El canal de fibra óptica consiste en un cable de fibra óptica de pequeño diámetro (del orden de 100 micrómetros), no conductor de la electricidad, por el que la información se transmite por técnicas de modulación de luz. Este canal es de gran capacidad y está libre de los problemas relacionados con voltajes inducidos y aislamiento eléctrico. El canal de fibra óptica presenta altos niveles de atenuación de las señales, como en el caso de hilo piloto limita su aplicación a líneas de transmisión de longitud relativamente pequeña. Por lo general no se utilizan técnicas de modulación de amplitud, debido precisamente a la atenuación y a la falta de consistencia de las características transferenciales de los transductores electroópticos utilizados en la interfaz entre la protección y el canal de comunicación. Son de mayor aplicación las técnicas de modulación de fase (o la demodulación de periodos de pulsos) o las digitales. Una variante práctica para la protección del cable de fibra óptica contra daños mecánicos consiste en colocarlo en el interior del conductor que se utiliza como hilo de guarda de la línea de transmisión. Al igual que la protección por hilo piloto, la protección piloto por comparac ión de fase es inherentemente diferencial y se basa en la comparación de corrientes, por lo que tienen las siguientes ventajas: i. ii. iii. iv. v. No requiere transformadores de potencial (excepto en el caso en que se utilizan relevadores de distancia detectores de falla). No es afectada por la inducción mutua entre la línea protegida y la línea adyacente. No es afectada por regímenes asimétricos de la línea protegida, tales como los relacionados con el recierre deficiente de interruptores o el disparo y recierre monopolar. Es aplicable a la protección de líneas largas con compensación serie capacitiva. No es afectada por las oscilaciones de potencia y pérdidas de sincronismo. La comparación piloto por comparación de fase tiene problemas con la discriminación entre las corrientes de carga y de cortocircuito, lo que limita su aplicación a los casos en que hay una diferencia apreciable entre ambas corrientes. Por esta misma razón su aplicación es difícil en líneas con alimentación débil en una terminal, o en líneas multiterminales. En la protección piloto por comparación direccional se hace una comparación indirecta de las direcciones relativas de las corrientes o de las potencias a partir de la operación de relevadores que tienen direccionalidad. Este principio se ha utilizado con todos los tipos de canales. En la figura 5.27 se presenta el 104 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” diagrama esquemático simplificado de una protección piloto por comparación direccional para una línea de dos terminales. La protección piloto por comparación direccional, al igual que la de comparación de fase, no realiza la función de respaldo para cortocircuitos externos, por lo que debe complementarse con protecciones de distancia o direccionales de sobrecorriente. La protección de fase generalmente es de distancia, mientras que la de tierra puede ser de distancia o direccional de sobrecorriente. Figura 5.27 Diagrama esquemático simplificado de una protección piloto por comparación direccional para una línea de dos terminales. En la práctica es común disponer el esquema de modo que las protecciones de distancia o direccionales constituyen también gran parte de la protección primaria de la línea protegida, y que su operación sea acelerada por la protección piloto en los casos de cortocircuitos internos cercanos a la terminal remota de la línea. Esto se logra disponiendo en el circuito de disparo del interruptor un contacto del relevador auxiliar de salida de la protección piloto en paralelo con el contacto de la unidad correspondiente a la segunda zona de la protección de distancia o con el contacto direccional de sobrecorriente. Por lo general también se utilizan algunos de los elementos de medición de los esquemas de distancia o direccionales de sobrecorriente como detectores de falla para la protección piloto por comparación direccional. Algunas consideraciones finales sobre las protecciones piloto por comparación direccional son las siguientes (esto se hace en comparación con la protección piloto por comparación de fase): i. ii. iii. iv. Tiene mayor velocidad de operación (tiempos de operación inferiores a 20mseg). Es más adecuada para la protección de líneas con derivaciones y, en general, de redes con cualquier configuración. Tiene mayor flexibilidad para admitir cambios en el sistema, incluyendo la adición de cargas en derivación en las líneas. Tiene mayor sensibilidad, ya que no confronta problemas de discriminación entre las corrientes de carga y de cortocircuito. 105 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” v. Impone menores requerimientos al canal de comunicación. La protección piloto por comparación direccional, por utilizar detectores de falla de tipos direccional o de distancia, requieren transformadores de potencial, puede ser afectada por regímenes asimétricos de la línea protegida (disparo y recierre monopolar o cierre deficiente de interruptores) o por la inducción mutua entre líneas, tiene limitaciones para su aplicación a líneas largas con compensación serie capacitiva y perdidas de sincronismo. En la protección piloto por comparación combinada de fase y direccional se combinan los principios de cada uno, utilizando un solo canal de comunicación, con lo que se tratan de retener las ventajas de ambos principios. En la comparación de fase se utiliza secuencia negativa pura o secuencia cero pura, y en la comparación direccional se utilizan dos detectores de falla (generalmente son relevadores de tiempo Mho), uno de ellos opera para fallas en la dirección de la línea protegida, y hace la función de disparo, mientras el otro opera para fallas en la dirección contraria, y hace la función de bloqueo. Al combinarse ambos principios, para la comparación de fase no se requiere la componente de corriente de secuencia positiva, pues la comparación puede cubrir aquellos cortocircuitos que no se detecten por comparación de fase. Esto tiene la ventaja de que la corriente de carga no afecta la protección, y no hay problema de sensibilidad. 106 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CAPÍTULO VI Aplicación del software CAPE. Este último capítulo contiene la traducción del manual original del software Computer Aided Protection Engineering (CAPE). Se darán cuenta de que éste software tiene muchas aplicaciones de las que se estudiaron en los capítulos anteriores. Su recorrido por CAPE. Esto no es una presentación publicitaria conservada. La mejor manera de entender una nueva herramienta, es manejarla por sí mismo. Usted estará trabajando con el programa de CAPE real. Se mostrarán algunos de los fundamentos y algunos aspectos más destacados. Usted es libre para explorar. Se ha organizado la gira como un conjunto de tareas que normalmente puede ser que se desee hacer. Después de comenzar CAPE se podrá hacer cualquier tarea en cualquier orden, las mismas se han enumerado en un orden que parece bueno para aprender sobre el programa de forma natural. Inicio de CAPE (Start CAPE). Aplicar las fallas (Apply faults). Iniciar el programa, adjunte una base de datos, y ajustar el diagrama unifilar. Aplicar las fallas con el diagrama unifilar, los datos de árbol, o los menús. No fallas estándar. Los informes impresos. Estudio de los relevadores de sobrecorriente (Study overcurrent relays). Visualización de los relevadores de sobrecorriente y su respuesta a las fallas. Arrastre para cambiar el ajuste de curvas o editar los ajustes directamente. Estudio de los relevadores de distancia (Study distance relays). Visualización de los relevadores de distancia y su respuesta a las fallas. Arrastre para cambiar el ajuste de curvas o cambiar directamente la configuración. Configuración automatizada de ejecutar los cálculos para establecer un relevador digital. Simular interactivamente el sistema de protección en torno a una falla y el funcionamiento de los interruptores paso a paso. Coloque y fije un nuevo relevador. Establecer un relevador digital (Set a digital relay). Simular la protección (Simulate protection). Añadir un relevador digital (Add a digital relay). Estudio de interruptores (Study breakers). Realizar un análisis del funcionamiento del interruptor. INICIO DE CAPE. Para empezar CAPE, haga clic en Inicio/programa/CAPE/CAPE Executive. 107 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Haga click en Aceptar en el “Time Remaining” ("tiempo restante") o pop-up si está utilizando el CD de demostración CAPE. Cuando CAPE aparece, haga clic en Attach Database (Adjuntar base de datos) en la barra de acción. La forma de selección del archivo aparece muy familiar a Windows. Búsqueda a \cape\dat, seleccione cape.gdb, y haga click en Open. El archivo “cape.gdb” es un ejemplo de la base de datos que tiene alrededor de 100 buses. El formulario de configuración de la sesión se abrirá automáticamente. Este formulario le permite elegir desde la base de datos adjunta qué datos de la red requiere para leer. Ya que queremos que CAPE lea todos los datos de la red de "cape.gbd", no se necesita hacer ninguna selección, sin embargo, es conveniente decirle a CAPE para abrir un dibujo de la red para este sistema. Haga clic en la casilla Read Graphics File (leer archivo de gráficos), si está en blanco. 108 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Si no hay ningún nombre de archivo aparece a la derecha, esta acción aparecerá el diálogo de archivo abierto, elija \cape\dat\cape.gf y abrir. También, observe que un botón de radio le permite elegir entre ANSI / IEEE e IEC modos de cálculo de corto circuito. Para el cortocircuito (SC), los dos son casi iguales, aunque hay algunas diferencias en el modelado de los generadores. Para el análisis de funcionamiento del interruptor (BD), hay diferencias más importantes en la evaluación de las calificaciones del interruptor de circuito. Haga click en aceptar, Build SC Network (construir red de cortocircuito) para aceptar las entradas de la sesión. CAPE leerá los datos de la red de la base de datos. Si un diagrama unifilar no aparece, haga clic en el Zoom-to-Fit button (Zoom-a-Botón de Ajuste) en la barra de herramientas estándar: La pantalla será algo como esto, a pesar de las barras de herramientas están en diferentes lugares, se pueden arrastrar a donde se prefiera. La pantalla de CAPE. Los Menús Principales (file…help) (archivo…ayuda) se encuentran en la parte superior de barra. Todos los menús a la izquierda de la línea divisoria vertical (|) son los mismos en cada módulo de CAPE. Los de la derecha del divisor tienen comandos que son especiales para el módulo activo. La Barra de Acción está justo debajo de los menús principales. Contiene los comandos más utilizados en el menú principal para su conveniencia. La mayor parte del resto de la pantalla se compone de: 109 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Árbol de datos. Esta columna de la izquierda es un árbol de Explorer que te da acceso natural a todos sus datos, a partir de las subestaciones, como se muestra. Área de texto. Salida de texto de los programas que aparecen aquí. Área de gráficos. El diagrama de la red, las características del relevador, y otras representaciones gráficas aparecen aquí. Puede arrastrar los separadores entre estas zonas con el ratón para cambiar el tamaño de ellos. La línea de comandos aparece bajo el árbol de datos y de los gráficos de la zona. Aquí es donde se pueden teclear comandos y respuestas a las instrucciones que aparecerán aquí de vez en cuando. La barra de estado en la parte inferior muestra el nombre de la base de datos adjuntos y archivos de dibujo. Ajustar el diagrama unifilar. A menudo van a interactuar con el diagrama unifilar cuando se realicen todos los ejercicios. Es importante que sepa lo siguiente: ¿Cómo ampliar el diagrama? Haga click y mantenga pulsado el botón 1 del ratón en algún lugar del diagrama donde no se dibuja nada, arrastre hasta que el cuadro incluya lo que quiere ver, y luego suelte el botón del ratón. Si lo prefiere, haga clic en uno de los iconos de lupa, hasta el nivel de aumento que se adapte. En cualquier momento, usted puede ajustar la vista con las barras de desplazamiento horizontal y vertical. Para empezar, haga clic k en Draw All (todo el dibujo) en el menú de gráficos. ¿Cómo seleccionar y cambiar el tamaño del texto? Usted necesitará la barra de herramientas Formato de texto. Si no es visible, vaya a View menu (menú Ver) y haga clic en Text Formatting (Formato de texto). Haga clic en cualquier parte del área de gráficos o en el área de texto, según el texto que desea controlar. Y puede elegir el tipo de letra, tamaño y atributos de negrita. ¿Cómo encontrar un bus? En primer lugar ajuste la ampliación a un nivel que desee. Luego haga click derecho en el diagrama, lejos de cualquier objeto. Seleccione Fin a bus (buscar un bus) en el menú resultante. 110 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Alternativamente, haga clic en Options (Opciones) en la parte superior del árbol de datos y configurar el botón de radio que dice CAPE al centro del diagrama unifilar en un objeto que seleccione en el árbol de datos. Entonces, cada vez que la búsqueda de, por ejemplo, un bus y haga clic en el árbol de datos, el diagrama unifilar se centrará en sí en el bus. APLICAR LAS FALLAS. Uno de los cálculos más frecuentes un ingeniero de protección es que debe calcular las corrientes y tensiones causadas por una falla. Con el software de CAPE puede rápidamente estudiar cualquier condición de falla que pueda imaginarse: las fallas típicas en cualquier fase, con o sin impedancia, fallas serie, defectos entre diferentes niveles de tensión, fallas simultáneas, o lo que sea. Errores estándar son normalmente estudiados a la hora de establecer los relevadores. Defectos complejos son necesarios cuando se tiene la reconstrucción de un verdadero acontecimiento de la vida y aprender por qué los dispositivos de protección operan en la forma en que lo hizo. Por ejemplo, es posible que desee saber lo que las corrientes de sus relevadores vio cuando un conductor de alta tensión se rompió y cayó sobre un conductor de baja tensión más adelante, posiblemente en contacto con la torre en el proceso. Es fácil de estudiar las fallas con CAPE, con o sin un diagrama unifilar. Primero. Después de haber iniciado CAPE, como se explica en la página 1, tendrá la base de datos de ejemplo y de la red de dibujo adjunto. Haga clic en Cape Modules (Módulos Cape) y Short Circuit (cortocircuito) para ir al módulo SC (cortocircuito). 111 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Arrastre el separador de barras que separa el texto y las áreas de gráficos y el árbol de datos para ajustar el tamaño de las ventanas como deseé. Presione y mantenga el botón de liberación 1 en la barra de división para hacer esto. Ajuste la ampliación del diagrama unifilar, como se explicó anteriormente, en el ajuste del diagrama unifilar. Falla en un bus. Con el diagrama unifilar con un aumento cómodo, desplácese hacia abajo a la subestación de Winder en el árbol de datos. Ampliar esta subestación hasta que el árbol muestre la lista de los buses en Winder. Haga clic en el botón Options (Opciones) en la parte superior del árbol de datos, elija el botón que dice Center one line diagram on selected item (Centro de un diagrama de línea sobre el tema seleccionado), y cierre el formulario. Luego haga clic en el bus 183 "Winder 230" en el árbol. El diagrama unifilar se centrará en sí en este bus. Haga clic derecho en el bus 183 Winder 230kV en el diagrama unifilar (no en una de sus líneas) y elegir Faults|Other Faults (Fallas | otras fallas). (Se podría haber elegido una de las tres fallas normal de manera directa, pero que sería demasiado fácil). Seleccionar Single_Line_Ground (sola_línea_tierra). La forma se ampliará como se muestra en la figura anterior. Tenga en cuenta 112 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” que puede elegir la fase fallada, la R y X de una impedancia de falla. Haga clic en aceptar para aplicar la falla. Para ver las corrientes de falla en el diagrama, haga clic derecho en el diagrama, pero lejos de objetos y seleccione Change displayed text (cambiar el texto que se muestra). La forma aquí se puede editar y estas son sólo algunas de las muchas muestras que pueda tener. Pruebe unos pocos y observe cómo la pantalla cambia a medida que prueba diferentes combinaciones. El botón Advances (Opciones avanzadas) conduce a una forma en la que podría convertirse en los ángulos fasorial, por ejemplo. Por último, seleccione Show Phase A and Zero Sequence Branch Currents (mostrar la fase A y la secuencia cero corrientes de rama) y haga clic en Aceptar. Para ver un informe de texto estándar, tira hacia abajo la barra de división entre el texto y gráficos de áreas. Para obtener un informe para cualquier bus, dar click en Reports|bus (Informes|Bus) y seleccione un bus desde el menú popup (emergente). También puede resaltar un número buses en un informe existente, haga clic derecho y elegir el bus # K informar bus. Puede imprimir el texto o gráficos de la zona haciendo click en cualquier área (para centrar el programa en ella), y luego haciendo click en File|print (Archivo|Imprimir). Si hace click en File|Print Preview (Archivo|Vista preliminar), se puede ver lo que obtendría sin malgastar papel. Informes de texto con las líneas de encabezado se puede producir con la opción de los informes de archivo en el menú de preferencias, pero que no se explica aquí. 113 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Falla de una línea (fallas de deslizamiento). Haga click en cualquier línea conectada a 183 Winder 230kV, más cerca de Winder que al bus remoto, por ejemplo, la línea superior en el lado derecho. Si, por error, hace click en el bus o en uno de los textos de cerca, sabrá que cuando se mira en la parte superior del menú contextual resultante. Elija Faults|Midline (fallas|línea media). Mueva el control deslizante a 0.7, lo que significa el 70% de la distancia desde el extremo que se ha elegido, y click en Aceptar. A continuación, seleccione del menú Single_Line_Ground (sola_línea_tierra) y haga clic en Aceptar. Su diagrama ahora tiene el siguiente aspecto. Observe que el bus de la línea media ahora indica donde ha sido aplicada la falla. Si desea mostrar los voltajes del bus o de otras corrientes de fase, haga click derecho en un espacio vacío del diagrama y seleccione Change displayed text (cambiar texto exhibido) como lo hizo anteriormente. 114 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Falla en multi-segmento de línea. Si el modelo tiene una línea de carga de los buses del en varios puntos, todavía puede desear la caída de una falla a lo largo de toda la línea, es decir, puede hacer caso omiso de los buses adicionales temporalmente. Nuestro caso de prueba tiene tal línea. Haga click en Options (opciones) en la parte superior del árbol de datos y, si es necesario, establecer la opción # 1 para “center one line diagram on selected item” ("centro de un diagrama de línea sobre el tema seleccionado"). Buscar subestación Monroe en el árbol de datos y ampliar esta subestación para mostrar la lista de sus buses. Haga click en bus 173 "Monroe". El diagrama se desplazará para mostrar este bus. (Está en la esquina inferior izquierda del dibujo.) Tenga en cuenta que la línea del bus 181 Monroe Winder 115 dispone de dos buses de carga. Haga click derecho sobre la línea cerca al extremo de 173 Monroe y elija Faults|Midline (fallas|línea media). Seleccione el bus remoto 181 Winder y elija aceptar en pop-up (en la ventana emergente). Ajuste el control deslizante a 0.85 y haga click en aceptar. A continuación, seleccione Three_Phase y haga click en aceptar. Nota donde CAPE puso la falla. Las carga de los buses son designadas como ficticias en la base de datos lo que permite que CAPE pueda saltar sobre ellos en forma automática. Combinación de línea de interrupción y falla cerca de un interruptor. Haga click en la línea de 104 Lawrville 115kV que se dibuja sobre el cruce de Monroe-línea Winder. Elija Network Changes|Outage line (cambios en la red|Línea de corte de energía). A continuación, haga click derecho sobre la línea entre Monroe y Winder, cerca de 173 Monroe. Elija Faults|Close-in (fallas|cerrado) y seleccione un tipo de falla Single_Line_Ground. CAPE lugares poco más allá de la falla del interruptor, efectivamente cero impedancia de distancia de los buses. Una vista de cerca en un bus se dibuja en el diagrama y todas las corrientes de Monroe están marcados con una "C" para indicar que se refieren a un primer plano en condición de falla ahí. Las corrientes de línea al final de la línea de Monroe difieren de aquellos en el extremo remoto, porque son la suma de los flujos en otras ramas en 173 Monroe (que obviamente no se muestra). 115 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Fallas complejas. CAPE puede modelar cualquier falla o una combinación de fallas que pueden ocurrir en la vida real. He aquí un ejemplo que puede haber experimentado o al menos oído hablar. Imagínate que un conductor de fase de una línea de alta tensión se rompe y cae sobre una fase diferente de una línea de baja tensión en la misma torre. Hay 30 grados implícitos de diferencia de fase entre los dos niveles de tensión causadas por los transformadores estrella-delta. El arco se extiende a la torre, formando un camino de tierra con impedancia. ¿Cómo analizar este problema con el fin de determinar si sus relevadores operan como se "espera"? En CAPE, se puede definir la falla, hacer algunos cambios balanceados en la red, y aplicar la falla. Es así de fácil. Una falla es cualquier desequilibrio que se pueda definir en el dominio de fase. Los cambios de la red, tales como interruptores abiertos y buses temporales, son condiciones de equilibrio, es decir, que implican las tres fases. La condición de falla general es una combinación de cambios en la red equilibrada. Éste diagrama ilustra lo que se quiere decir. 116 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Inserta un bus temporal en la línea de alto voltaje en el punto donde el conductor se rompió. Luego de abrir las tres fases de la línea en ese punto (un cambio equilibrado). Esto crea un bus temporal en el segundo punto. A continuación, insertar un bus de la línea temporal de bajo voltaje (LV) en el punto donde el conductor hace contacto con el alto voltaje (HV). Esto hace un total de tres buses de carácter temporal. El último paso consiste en aplicar una falla previamente definida en la parte superior de los tres buses. El diagrama unifilar muestra la mayoría de las corrientes de intereses, puede solicitar un informe detallado del texto haciendo click en Report|Bus (Informe|Bus) y pedir un informe de "todos los buses fallado". La definición de la falla que usaría está dibujada en la parte inferior derecha del diagrama de la página anterior. Tenga en cuenta que se compone de las conexiones entre tres buses y la tierra. Las conexiones entre las fases A, de los nodos 1 y 2 y entre B de los mismos nodos pueden parecer extraños a primera vista. Simplemente volver a conectar las fases en buen estado de la apertura equilibrada que hemos creado en la línea de alta tensión, dejando a la fase C abierta. Para definir la falla en CAPE, haría click en Define Fault (Definir error) en la barra de acción. En pop-up (formulario emergente), se le daría un nombre a la falla, utilice Add Node (agregar nodo) para agregar de tres nodos, y luego utilice Add Connection (agregar conexión), sucesivamente para añadir la conexión cuatro mostrada. (Siéntase libre de errores, haga click en Define Fault (Definir falla) y elija la falla en Fallen Conductor para que pueda ver la forma, lo que falla o algo similar que ya está definido). ¿Qué pasa si no tengo un diagrama unifilar? Si usted no tiene un diagrama, haga click en Define Fault (definir la falla) y aplica la falla en la barra de acción cuando sea necesario. Los formularios permiten la búsqueda de componentes de red para tener fuera de servicio y el bus bajo falla. Todos los informes aparecerán en el área de texto. 117 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” ESTUDIO DE LOS RELEVADORES DE SOBRECORRIENTE. Típicamente, el ingeniero de relevadores estudia la coordinación entre los dispositivos de sobrecorriente (relevadores, restauradores de distribución, y fusibles), trabajando con curvas de coordinación de tiempo-corriente (TCC) para encontrar las curvas de los tiempos de operación de las fallas de interés. Esto se puede hacer muy rápidamente en CAPE con el módulo de gráficos de la Coordinación. CAPE utiliza modelos específicos de relevadores de los fabricantes, será capaz de ajustar la misma configuración que lo haría en el dispositivo físico y además puede guardar los ajustes en el dispositivo físico. Usted puede ahorrar ésos ajustes con dos clicks de ratón. Primero. Después de haber iniciado CAPE, como se explicó anteriormente, tendrá nuestra base de datos de ejemplo y de la red de dibujo adjunto. Haga click en Cape Modules y Short Circuit (módulos cape y cortocircuito), de modo que el cortocircuito (SC) estará disponible. Luego haga click en Cape Modules y Coordination Graphics (módulos cape y coordinación de gráficos) para pasar a CG. El CG de Windows son un poco diferentes del resto de CAPE: el área de texto se coloca a la derecha del área de gráficos por defecto. Usted puede arrastrar las barras del divisor que separan a estas zonas y el árbol de datos para ajustar el tamaño de la ventana que quiera. Para hacer esto presione y mantenga el botón de liberación 1 en la barra de división. Si usted ha comenzado primero el módulo de cortocircuito, usted puede cambiar rápidamente hacia adelante y hacia atrás entre las exhibiciones del diagrama unifilar de la curva haciendo click en las etiquetas de Short Circuit y Coordination Graphics (cortocircuito y coordinación de graficas). De un click en Short Circuit (cortocircuito) y ajuste la ampliación del diagrama unifilar como se explicó anteriormente. 118 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Mostrar curvas. Con un aumento cómodo en el diagrama unifilar, haga click derecho en el diagrama lejos de cualquier objeto y seleccione Find a bus or substation (buscar un bus o subestación). Haga clic en el botón de radio en Bus names y Case insensitive (nombre de los buses y sin diferenciación entre minúsculas y mayúsculas) en la parte superior de la ventana emergente. La opción Match.....no importa mucho aquí. Comience a escribir la abreviatura de "Gansvle 1"; por el tiempo que usted ha escrito "ga", sólo pocos buses se mantendrán. Haga click en el bus "Gansvle1 115" y haga click en Aceptar. El diagrama unifilar se centrará en sí en éste bus. Ahora será fácil escoger un relevador principal directamente en el diagrama, que mira de Gainesville a Cornelia. Puesto que usted también puede elegir desde el árbol de datos en Coordination Graphics (CG) los relevadores primarios, éste método se utilizará para escoger un relevador de seguridad que mira de Gainesville No.2 a Gainesville No.1. Su pantalla se verá como la imagen siguiente: La imagen muestra en el diagrama unifilar el cortocircuito de la línea que va de Gainesville2 a Gainesville1 y a Cornelia. Estamos interesados en relevadores de sobrecorriente direccionales y se mostrarán relevadores instantáneos y de retardo en Gainesville1 y Gainesville2. Haga click derecho sobre la línea de conexión 153 "GANSVLE1 115kV" a 160 "Cornelia 115kV", más cerca del extremo de Gainesville. Elija Device Curves|Initialize (curvas de dispositivo|iniciar). El formulario ha 119 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” escogido la subestación denominada "Gainesville N º 1" y el panel de relevadores (LZOP) llamado "Cornelia Línea 115" en la línea de Cornelia para usted. Los dispositivos de protección de la Zona Local de Protección se enumeran en el centro de la forma. Elija el IRQ-9 (que tiene el nombre de "258DG"). La lista de elementos en la IRQ-9 en la parte inferior. Haga click en el elemento de IOC y después en el elemento de TOC. CAPE ya ha pasado a las ventanas del CG, y ahora se muestra las curvas. Si se quiere añadir un relevador de seguridad. Por la variedad y la conveniencia, usaremos el árbol de datos para hacer esto. Busque la subestación de "Gainesville N.2," LZOP "Gainesville # 1 White 115", y realmente "11.00 358DG (IRQ-9...)." Arrastrar el elemento de la IOC desde el árbol de datos y colóquelo en el área de gráficos. (Nota cómo el símbolo de la "mano" del cursor cambia mientras que se mueve a la pantalla que indica que es permisible hacer eso), a continuación, arrastre el elemento de TOC en la pantalla. 120 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” La exhibición de la curva parecerá la que se muestra aquí. El número que muestra el número de curva, estilos de línea, y en realidad los nombres no pueden ser como se muestra, pero puede arrastrar en cualquier lugar o haga click derecho sobre él y moverlo. Los números de la curva se pueden arrastrar donde se quiera. Tenga en cuenta que las curvar TOC y IOC se truncan donde se cruzan. Para ver toda la curva de TOC, haga click en: Preferences|Overcurrent_Element_Option (tab). Y para quitarlo seleccione Truncate_TOC y haga click en aceptar. Mire el área de la leyenda (texto) para ver la clase de información que contiene. Usted puede necesitar arrastrar la barra del separador para hacer la leyenda más grande temporalmente. Aplicar una falla. Las curvas por sí solas no nos dicen lo suficiente. Tenemos que aplicar una falla para ver si los elementos funcionan rápidamente. Volver al diagrama unifilar (Short Circuit tab). Haga click en el bus de 153 al bus 160, elegir Plot Faults in CG|Midline, (cuadro de fallas en CG|línea media), ajuste el deslizador a 0.3, y elegir una falla Single_Line _Ground. El CG responde trazando las marcas de la corriente de falla y el tiempo de operación de cada elemento gráfico, que tenga un tiempo de funcionamiento finito. Más importante aún, observe la tabla de cantidades de funcionamiento, los múltiplos de pick up, 121 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” y los tiempos en el área de texto (no mostrado aquí). Solamente el elemento del IOC de respaldo no funciona (como era de esperar). Aplicar las fallas de deslizamiento. Haga click derecho en un espacio vacío de la imagen y elija Remove all faults (Quitar todos las fallas). Haga click derecho de nuevo y elija Clear all network changes and stored changes (borrar todos los cambios de red y los cambios guardados). Volver al diagrama unifilar (Short Circuit tab). Haga click derecho en la línea del bus 153 al bus 160 cerca del final del bus 153, elija Plot Faults in CG|Faults Study (fallas en CG|estudio de fallas), seleccione Single_Line_Ground y aceptar, y, cuando se le pregunte por un tamaño de paso, elegir el valor por defecto de 0.1 con sólo hacer click en aceptar. Cuando se le preguntó si se abre el interruptor remoto, otra vez sólo haga click en aceptar (de aceptar o no la respuesta por omisión, que es "no"). CAPE aplica fallas a lo largo de la línea principal y los informes de las respuestas en la leyenda. Examinar la tabla. Tenga en cuenta que la falla en la línea del extremo significa que el interruptor remoto está abierto y la falla está "colgada" al final. Cuando esté listo, haga click derecho en un espacio vacío de la imagen y elija Remove all faults (eliminar todas las fallas). 122 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Cambiar la configuración. Es casi trivial para cambiar los valores y ver los efectos. Puede hacer esto arrastrando una pequeña parte de la curva con el ratón o haciendo click derecho en la curva para solicitar un formulario para la configuración de la edición directamente. Antes de ejercer estos métodos, aplicar un falla a tierra del 80% hacia afuera del bus 153 en la línea del bus 153 al bus 160. (Haga click en Short Circuit, haga click derecho en la línea del bus cerca de 153, elegir Plot Faults in CG|midline, la posición del cursor en 0.8..... y de aceptar, luego elija Single_Line_Ground....y aceptar). Observe que ninguno de los dos elementos del IOC funciona pero que el elemento primario del IOC (curva #1 en éstas curvas) ve un poco menos de uno de los múltiplos de la corriente de pick up (arranque). Utilizando el botón 1 del ratón, arrastre y suelte la parte vertical de la curva # 1 un poco a la izquierda hasta que se opere. La tabla de operaciones en la leyenda le dirá tan pronto como esto sucede. Ahora arrastre y suelte la curva de TOC hacia arriba y hacia abajo (curva # 2 en estas fotos). Observe cómo el tiempo de funcionamiento y el tiempo de línea (dial), el cambio de la curva en la leyenda como lo puede arrastrar. Para utilizar editar formularios, haga click derecho en la curva de TOC y elija Setting|Make temporary setting changes (configuración|Hacer cambios de la configuración temporal). Podrá ver la forma mostrada en la siguiente hoja. El botón situado junto a Time Dial Settings muestra el valor que acaba de arrastrar. Haga click en este botón. El pop-up hace el cambio de valor de los límites a los valores mínimos y máximos, así como este estilo particular de retransmisión. CAPE ilustra el valor de los modelos de los relevadores, que son específicos de cada fabricante. Introduzca un valor de 3.0 y haga click en aceptar. El dial cambia el valor de ajuste y los cambios de tiempo de prueba 123 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” con él, como debe ser. Estos son sólo los cambios provisionales. Para ver la configuración almacenada en la base de datos, haga clic k en el botón de Modified (modificado). Ahora, el formulario muestra la base de datos (Original) de valores. Activar el botón de nuevo lo que cambia de nuevo a "Modificado". Para hacer el cambio de la curva sin cerrar el formulario de edición, puede hacer click en Apply (aplicar). Para cambiar la curva y cerrar el formulario, haga click en aceptar. Haga click derecho en cualquier curva y notar que se le puede cambiar la relación de CT o la relación de VT temporalmente. (Si usted se pregunta por qué hay una relación de VT en todos, recordará que estos relevadores son de tensión polarizada). Una vez más, ninguna de nuestras manipulaciones ha cambiado la base de datos. Para demostrar esto, haga click en Refresh Protection Data (Actualizar los datos de protección) en la barra de acción. Esto sustituye a todos los cambios con los valores de configuración de la base de datos. Usted puede ahorrar solamente ajustes cambiados explícitamente. Usted haría eso haciendo click en Save Modified Settings (guardar configuración modificada) en la barra de la acción y eligiendo los relevadores para ponerse al día. ESTUDIO DE LOS RELEVADORES DE DISTANCIA. Relés de distancia en CAPE se estudian en la misma forma como usted trabajó con relevadores de sobrecorriente en el ejercicio anterior. Usted puede seleccionar y mostrar características de los elementos, se aplican las fallas, y cambiar la configuración. Normalmente, usted trabajará en el plano R-X, pero también se puede estudiar la coordinación en el plano de tiempo-distancia o analizar la sensibilidad de la carga en el plano P-Q (potencia). Los modelos de fasores de CAPE de los relevadores de distancia son insuperables por cualquier producto de software de la competencia. La característica dinámica es siempre usada por CAPE para evaluar el funcionamiento de un elemento de distancia, aunque CAPE muestra la característica estática de forma 124 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” predeterminada. Al modificar el ajuste, usted ajusta los mismos ajustes nombrados que estarían el dispositivo físico. Primero. Después de haber iniciado CAPE, como ya se explicó, tendrá nuestra base de datos de ejemplo y de la red de dibujo adjunto. Haga click en Cape Modules y Short Circuit, de modo que la SC estará disponible. Luego haga click en Cape Modules y Coordination Graphics para pasar a CG. El CG de Windows son un poco diferentes del resto de CAPE: el área de texto se coloca a la derecha del área de gráficos por defecto. Puede arrastrar el divisor de barras que separan a estas zonas y el árbol de datos para ajustar el tamaño de Windows como desee. Presione, mantenga, y suelte el botón 1 del ratón en una barra del divisor para hacer esto. 125 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Si usted tiene ha iniciado el módulo de cortocircuito, puede cambiar rápidamente de nuevo y el diagrama unifilar haciendo click en las pestañas de Short Circuit y Coordination Graphics. Haga click en Short Circuit y ajustar el aumento del diagrama unifilar a un nivel cómodo, como ya se explicó anteriormente. Esta parte de la gira CAPE se centrará en los relevadores de distancia en Tugalo y la subestación de Commerce. Mientras tenga el diagrama unifilar a la vista, céntrela en Data Tree (árbol de datos) a lo largo de la ruta de Commerce|Buses y haga click con el botón 1 del ratón sobre 179 "Commerce 115". Options|Center one line diagram on select item se establece cuando se hizo esto, el diagrama se ajusta automáticamente a bus 179 en el centro de la pantalla. Haga click en Coordination Graphics (tab). Mostrar curvas. En el ejercicio anterior, se comenzó a seleccionar las curvas de sobrecorriente haciendo click derecho sobre su ubicación en el diagrama unifilar. Esta vez vamos a utilizar el árbol de datos completo. Una vez más, en el ejercicio anterior se trabajó con los relevadores electromecánicos. Esta vez tendremos que seleccionar relevadores digitales. En lo que se refiere a CAPE, los relevadores digitales no son más complicados para trabajar, a excepción de que tienen un poco más de ajustes. Buscar en el árbol de datos a lo largo de la ruta de acceso Tugalo|LZOPs |"Commerce 115 Line"|Relays|Digital_REL521. Al expandir el último elemento, observar aquí una lista impresionante de elementos. Este es un ABB REL521 y tiene cinco zonas de la fase y los elementos de distancia de tierra, así como muchas otras funciones. Observar debajo de la lista, encontramos DIST "ZM1_PH", haga click derecho sobre él y elija Draw this Device (dibujar este dispositivo). La característica cuadrilátera de la zona 1 del elemento se mostrará. De manera similar, haga click derecho sobre DIST "ZM2_PH" 2 y seleccione Add this device (agregar este dispositivo). Observe cómo esto se suma a la pantalla existente y no se tiene que iniciar uno nuevo. (Si elije algún otro elemento, por error, haga click derecho en su curva y elija Remove this curve (eliminar esta curva) en el menú emergente). 126 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Usted puede agregar más elementos de distancia y la red a la pantalla. Busc ar en Data Tree (árbol de datos) a lo largo de la ruta de acceso de Commerce|LZOPs|"Toccoa 115 Line"|Relays|Digital_7SA513. Este es un relevador de Siemens. No se deje engañar en pensar que tiene menos elementos de distancia que el anterior, su tierra y las funciones de distancia de fase se combinan en cada elemento de la distancia. Haga click derecho sobre DIST "Z1" 1 y seleccione Add this device (agregar este dispositivo). Haga click derecho sobre DIST "Z2" 2 y seleccione otra vez Add this device. Su área de gráficos tendrá el siguiente aspecto. Puede ampliar la pantalla con la técnica de costumbre "arrastre-liberación", o simplemente haga click en cualquier curva de distancia y la elija Zoom to fit (ajuste de tamaño). Puede colocar la clave de color y las etiquetas de la curva que desee arrastrándolos con el ratón. El relevador primario de este par es el 7SA513 en el bus 179, el respaldo es el REL521 en el bus 167. Desde la zona principal 2 el elemento va más allá de su bus remoto, 169, podría ser útil para mostrar más de la red en ese bus. Haga click derecho en el bus etiquetado "169" en la zona del gráfico (también seleccionar "Bus 169" en la ventana emergente, si es necesario distinguir los objetos cercanos) y seleccione Add forward looking branches (agregar ramas hacia adelante). Elija bus 168 Yonah 115 en la ventana emergente, haga click en aceptar y tenga en cuenta que la línea del bus 169 al 168 se muestra ahora en la pantalla R-X. Puede añadir más líneas haciendo click en cualquier bus de muestra. 127 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Hay muchas otras características cosméticos puede explorar por su cuenta. Por ejemplo, usted puede hacer click derecho sobre el número y seleccione “Remove Key” ("Eliminar clave") y usted puede hacer click derecho sobre cualquier curva y seleccione Curve labe|Info Box. El cuadro de información puede sustituir a la zona de la leyenda, ya que contiene gran parte de la misma información. Aplicar una falla. Cualquier falla de cortocircuito aplicada en el diagrama unifilar se puede trazar de inmediato en la pantalla de curvas. Sin embargo, no es necesario utilizar el diagrama unifilar. Haga click derecho en el bus 169 en el diagrama RX y después el Bus 169 en el pop-up, y seleccione las fallas. 128 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Seleccione el tipo de fallo de Line-to-Line (línea a línea). CAPE traza la ubicación de las fallas en la pantalla R-X. También se informa de la impedancia aparente vista por cada elemento gráfico, su tiempo de funcionamiento, y su cociente de impedancia de la fuente en el área de leyenda. Examinar la tabla en la siguiente imagen. Como indica el gráfico, sólo el elemento de la zona primaria 2 opera. El tiempo de operación reportada es la suma del tiempo de operación de elementos y su tiempo asociado, que fue establecido en 30 ciclos. La observación más interesante es que las zonas 1 y 2 del relevador de respaldo en el bus 167 consideran la falla detrás de sí mismos (indicado por el ángulo negativo de la impedancia aparente). La razón es que nuestro ejemplo de relevadores está en un lazo. Las fallas grandes de otras partes de la red contribuyen en el lazo de Commerce. La mayor parte de la corriente de falla de fluye directamente a la falla en Toccoa, pero algunas corrientes fluyen alrededor del lazo, hacia nuestro relevador de respaldo en Tugalo. Si desea ver la topología, haga click en "Short Circuit". CAPE ofrece pantallas de texto predefinidos que muestran impedancias aparente en el diagrama unifilar. Son excelentes para aclarar situaciones como ésta. Cuando CAPE evalúa la respuesta de un elemento de distancia, utiliza su modelo completo, detallando la trama de la localización de fallas evidentes. 129 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Usted siempre debe basarse en el tiempo de funcionamiento que se muestra en la leyenda, no en el gráfico, para evaluar la operación. CAPE evalúa otros factores que pueden no ser evidentes para usted, tal cómo la supervisión del elemento de partida, la lógica de selección de la falla, y las características de expansión dinámica. Estas cosas dependen del fabricante y el modelo, en los programas que utilizan métodos genéricos no los encontrará de manera que sólo CAPE los utiliza. Ahora ha estudiado un sólo bus con una falla simple. Para aplicar una falla de línea, haga click derecho en una línea que se muestra en la segunda figura de la página anterior. Aplicar las fallas de deslizamiento. Vamos a empezar con una pizarra limpia. Haga click derecho en cualquier curva y elija Remove faults|Remove all faults. Repita, esta vez eligiendo Auto Scale|Off (auto escala|cancelado). Para mantener la escala como lo es ahora. Es una simple cuestión de estudiar las fallas de deslizamiento a lo largo de toda la línea. Haga click derecho en la línea del bus 179 (Commerce) a 169 (Toccoa), cerca del bus 179, en la pantalla de R-X. Elija Faults|Faults study (fallas|estudio de fallas) en el menú contextual resultante. Haga click en Lineto-Line y en aceptar. Por último, haga click en aceptar para aceptar el valor predeterminado de "cerrado" para la condición de interruptores remotos. Examinar la tabla que se ha escrito en el área de leyenda (arriba). La impedancia aparente vista por el elemento respaldo (# 1 y # 2) crecerá rápidamente a medida que la falla se deslice a lo largo de la línea. Cuando la falla está en el 90% y 100% de las posiciones, en realidad aparece detrás de los relevadores, como se indicó anteriormente. Haga click en cualquier curva y elija Remove faults|Remove all faults. Repetir, seleccionando Auto Scale|On. 130 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Cambiar la configuración. Al igual que con relevadores de sobrecorriente, puede cambiar la configuración de relevador de distancia, ya sea arrastrando la curva con el ratón (click izquierdo-arrastrar-soltar) o directamente con el formulario de edición (botón derecho de la curva). Ninguna de las dos operaciones cambia los ajustes en la base de datos. Sólo la copia temporal del relevador se cambia en CAPE. La interacción entre varios ajustes que controlan cada característica de cuadrilátera hace la interacción más complicada en comparación con el arrastre, por ejemplo, el círculo mho. Usted puede arrastrar las curvas de primaria también, pero usted tendrá que elegir entre la primera las Unidades 1 y 2 en el pop-up). Recuerde que se realiza arrastrando con el botón izquierdo. Cuando haya terminado, haga click en Refresh Protection Data (actualizar los datos de protección) en la barra de acción para restaurar la configuración original. Para estos relevadores, es probable que prefiera editar la configuración directamente. Haga click en la zona 1 característica del relevador de respaldo (curva # 1). Seleccione Setting|Make temporary setting changes (Configuración|Hacer cambios temporales de ajuste). La distancia estándar del elemento aparece en el editor de formularios. Los ajustes no aparecen aquí porque este es un relevador digital; haga click en el botón Common en la parte inferior del editor de formularios para ver el Common Taps. La forma en la derecha. Siéntase libre para desplazarse por la lista de los ajustes. Sin embargo, los relevadores digitales tienen muchos Taps que puede resultarle más fácil utilizar la función buscar característica de esta forma. Introduzca Operation_Z1 en Find field (buscar campo) y haga click en Find. Es necesario que pueda ver la siguiente configuración"Operation_Z1", como se representa aquí. 131 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Haga click en cualquier parte de la línea con el ajuste de nombre X1PP_Z1. Controla la reactancia de alcance de fase-fase de la unidad de la zona 1, y el elemento de distancia tiene el valor de 3.01. Cambiar el valor a 4.0 en la ventana emergente y haga click en aceptar. El valor en la forma ha cambiado. Si quiere ver el valor de base de datos de nuevo, alterne el botón Modified (modificado). Para ver el efecto de la nueva configuración de la curva, haga click en Apply (aplicar) (que sale del editor de formularios de arriba) o en aceptar (que cierra el editor de formularios también). Usted se preguntará inmediatamente porqué el ángulo de una porción más oculta del elemento del cuadro ha cambiado. Después de todo, sólo se cambió el alcance de la reactancia, La respuesta es, los cálculos para el ángulo de éste relevador particular, se calcula como el arctan (X1PP_Z1/R1PP_Z1). No se cambió R1PP_Z1 en la proporción. El modelo hizo lo que tenía que hacer. Esto ilustra la ventaja del modelo de CAPE. Mostrar la característica dinámica. Las gráficas que han estado buscando hasta ahora son llamadas características estado estáticas o fijas. Estas son correctas si el relevador utiliza la auto-polarización de tensión como su referencia. Sin embargo, la mayoría de los relevadores de distancia emplean una memoria de polarización cruzada, o combinación de tensión cómo referencia. En tales casos, la característica real se expandirá. El importe de la de expansión depende de la tensión de referencia utilizada y la impedancia de la fuente detrás del relevador. Por tanto, El relevador puede operar por las fallas fuera de la característica estática. Los cambios dinámicos característicos de la localización de fallas y el tipo, si CAPE fuera a trazar las características dinámicas en lugar de las estáticas, el gran número de curvas que habría que mostrar para el error de varios estudios se hacen en el gráfico ilegible. Para esto CAPE siempre utiliza características dinámicas para evaluar la operación. Eso es un beneficio inherente del uso de CAPE por tener los modelos detallados de los 132 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” relevadores. La tabla de las operaciones en la leyenda, le indica si el relevador opera correctamente. Es fácil trazar la característica dinámica cuando se requiera. Como ejemplo, se exhibirá ahora la característica mho de un SEL-321, se aplica una falla, y luego decirle a CAPE que trace la característica real de la falla. Utilice Data Tree para buscar la trayectoria de Commerce|LZOPs|"Tugalo Línea 115"|Relays | Digital_SEL_321. Amplíe este relevador, haga click derecho sobre el elemento DIST "M1P 1, y elija Draw this device. Antes de elaborar la característica dinámica, usted debe aplicar una falla que opere al elemento. Para ello, haga click derecho en el diagrama R-X e Indicar en la línea de bus 179 a 167. Elija Faults|Midline. Cuando el control pop-up aparece, arrastre el deslizador a 0.5 (50% de la línea) y haga click en aceptar. Elija una falla Three_Phase y haga click en aceptar. La falla será trazada y la tabla de leyenda dirá que éste elemento de la zona 1 opera. Haga clic derecho sobre la curva de la zona 1 y elija Plot the dynamic characteristic (trazar la característica dinámica). La característica dinámica se representa como usted considere (observar la imagen anterior). Haga click derecho sobre la línea de nuevo, cerca de autobús 179, elegir Faults|Midline, deslice la barra a 0.3 y haga click en aceptar. Elige una falla Three_Phase de nuevo pero esta vez incorpore una resistencia de 10 ohmios y elija aceptar. Observar el informe en la leyenda. Explícitamente le dice que en 133 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” el exterior de los diagramas de la falla fuera del estado (estable), el relevador opera. Esto ilustra una característica importante de CAPE: Usted puede confiar en él. ESTABLECER UN RELEVADOR DIGITAL. Nadie hoy en día puede confiar todo el trabajo de ajuste de los relevadores a un programa de computadora. Sin embargo, es muy razonable dejar a la computadora asumir el control de la mayor parte del trabajo. CAPE puede ejecutar todos los estudios de las fallas, calcular los ajustes iniciales y siguiendo las mismas reglas que usted seguiría. Cuando una norma no puede ser satisfecha, CAPE puede advertirle sobre el conflicto. Entonces, el ingeniero de relevadores, le puede decidir qué hacer. Esto le ayuda a ser mucho más productivo. Algunos usuarios de CAPE han estado aplicando algoritmos de ajuste de los relevadores desde 1994. Ellos han demostrado que el enfoque es práctico y que conduce al ahorro de tiempo y de costes significativos. Los algoritmos del ajuste son los pequeños programas que usted utiliza en el interior de CAPE. Pueden ser muy específicas de una empresa o pueden ser impulsadas por los parámetros a controlar, y por lo tanto ser bastante general. Recientemente se han desarrollado una excelente biblioteca de la creación de macros relés de distancia digital. Se han presentado en los documentos en seis conferencias técnicas en cuatro países. Primero. Después de haber iniciado CAPE cómo ya se explicó anteriormente, se puede contar con la base de datos de ejemplo y de la red de dibujo adjunto. Haga click en Cape Modules y Relay Setting para moverse al módulo de RS. Arrastre el separador de barras que separa el texto y gráficos de áreas y el árbol de datos para ajustar el tamaño de ventana que desee. Presione, mantenga, y libere el botón 1 del ratón sobre una barra de división. Para hacer esto ajuste la ampliación del diagrama unifilar tal como se explicó anteriormente. 134 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Elegir un relevador. Vamos a establecer un relevador SEL-321 en la subestación Winder en la línea de la subestación Centro. Usted puede elegir una retransmisión desde Data Tree, la barra de acciones, o del menú de acción, no importa. Vamos a usar la barra de acciones. Haga click en Set Relay. Los relevadores están en los paneles de relevadores que llamamos LZOPs (Zonas Locales de Protección). Un subestación puede tener cualquier número de LZOPs. Desplácese la lista de la subestación y elija Winder. Elegir en LZOP la línea denominada Center 230 Line. Éste panel tiene cuatro sistemas de protección; elegir la primera, Demo. Haga click en SEL-321 en éste esquema y, a continuación, haga click en aceptar. Elegir un algoritmo de ajuste. A continuación, verá una ventana emergente con todos los algoritmos de ajuste en la biblioteca de CAPE. Haga click en la primera, General Purpose: Phase and ground mho elements of digital Relay. Cuando lo haga, un poco ya la explicación aparece en la mitad inferior del formulario. Haga click en aceptar. El 135 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” algoritmo le pedirá el máximo avance y retroceso corrientes de carga y ángulos, escriba 1000 Amperes y 30 grados para cada uno. Acepte el voltaje de bus de prefalla de 1.0 PU y haga click en aceptar. El algoritmo comenzará a correr un estudio de la falla y, a continuación aparecerá una pregunta sobre si para el tratamiento de la zona 3, como un elemento de distancia escalonada o un elemento piloto inverso. Simplemente haga click en aceptar para elegir el valor (piloto inversa). El algoritmo calcula el alcance primario de cualquier relevador de distancia digital. Sin embargo, el SEL-321 es un modelo para los que se puede traducir el alcance primario en los ajustes reales del relevador. Así que, antes de que finalice, le preguntará si reajustar ese relevador temporalmente dentro de CAPE. Haga click en Aceptar. Siempre es la misma configuración en la base de datos, sólo la imagen de la retransmisión con las que trabajamos dentro de CAPE. (Si usted realmente desea guardar la configuración volver a la base de datos, haría click Save Modified Settings (guardar cambios) en la barra de acción.) Examinar el informe. Arrastre la barra divisoria entre el texto y el diagrama unifilar hacia abajo de manera que puede tener una buena observación en el informe del estudio de ajuste. Usted no puede entender todo si no observa detenidamente el informe de arriba a abajo, sólo para tener una idea de lo que está allí. Podrá darse cuenta que CAPE ha examinado la red alrededor del relevador y ha hecho estudios de la falla con varias interrupciones para determinar impedancias 136 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” aparentes que utilizará para computar los justes primarios iniciales del alcance para un posible esquema stepped-distance. Más tarde, comprueba si alguno de los primarios de la zona de configuración ven demasiado lejos en transformadores remotos. Puede Observar que la zona de 3 llega a través de un transformador y tiene que ser jalado hacia atrás para ver sólo el 80% de ella. De este modo, ya no puede ver una zona remota 2 de bus. Desde entonces que entra en conflicto con las normas seguido, se da una advertencia para el ingeniero. Controles de la invasión de carga son hechos. La carga máxima permitida por los ajustes provisionales es superior al máximo de carga prevista máxima especificada anteriormente. Las zonas piloto de avance y retroceso se calculan, (teleprotecciones) y hacen diversos controles. Los ajustes de la fase piloto y la tierra tienen que ser limitadas porque de lo contrario vería demasiado lejos en un transformador. Más controles se hacen y se comprueba que los ajustes previamente tirados detrás de la zona 3 no pueden considerar los dos buses de la zona remota 2. En la parte inferior, podrás ver el informe de la configuración recomendada que se muestra arriba. Si desea más detalle que este informe, a su vez en Detailed_Reports en el menú Preferences. 137 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Elemento de secuencia negativa direccional. Hay muchos otros tipos de elementos para fijar en la mayoría de los relés digitales. Uno de los tipos de interés es el elemento de secuencia negativa direccional empleado en el SEL-321. Se utiliza para dar control direccional instantáneo y elementos de sobrecorriente de tiempo inverso, así como elementos de distancia. Esto sustituye a la técnica tradicional de polarización de corriente de secuencia cero. Dado que la carga desequilibrada crea una corriente de secuencia negativa, un ajuste existe para la especificación de un cociente normal de las corrientes de secuencia negativa a positiva. Un algoritmo en la biblioteca CAPE puede establecer este elemento. Haga click en File|Clear Text Screen para borrar el informe anterior. Haga click en Set Relay en la barra de acción de nuevo. Para la búsqueda del relevador, simplemente haga click en el SEL_321 para activar y haga click en aceptar. Esta vez, elegir el algoritmo General Purpose: SEL negative-sequence directional element y haga click en aceptar. Cuando se le solicite para la corriente de carga máxima, de nuevo escriba 1000 y haga click en aceptar. Para los más pequeños permite proporción de las corrientes de secuencia de negativa a positiva, acepte el valor predeterminado de 0.10 haciendo click en aceptar cuando se le solicite. Cuando se le pregunte si desea guardar la nueva configuración, haga click en aceptar. Recuerde que éste paso sólo guarda los cambios de manera temporal de la imagen del relevador de CAPE, no la configuración almacenada en la base de datos. Desplácese por el informe. Como antes, un estudio de la falla se ha hecho para dar los números en los que los ajustes iniciales se basan. En éste caso, el peor 138 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” de los casos de avance y retroceso de impedancias aparentes se encuentran sobre la base de las tensiones de y las corrientes de secuencia negativa. Estas situaciones conducen a valores recomendados para la configuración de Z2F y Z2R. El estudio de la falla también conduce a los ajustes para los elementos delanteros y elementos de revertir esa medida 3I2. Por último, observe que al menos I 2 de las fallas inversas estudiado es menor que el desequilibrio I2 que dijo que sería normal cuando dejamos que a2 = 0.10. El algoritmo recomienda un menor valor que permitirá a la corriente de falla inversa lo peor que pueda reconocer. Sólo usted el ingeniero puede decidir qué ajuste a aplicar a2. Para concluir, note cuánto de los cálculos desperdiciadores de tiempo puede hacer este software para usted, cómo te lleva rápidamente a las cuestiones que necesitan de su decisión, y cómo el informe puede ser su registro por escrito de cómo los ajustes se han desarrollado en el primer lugar. SIMULAR LA PROTECCIÓN. El simulador del sistema CAPE le permite colocar una falla en la red y ver la de respuesta de su sistema de protección como interruptores abierto para desactivarla. Creemos que es la herramienta más útil y práctica que ha sido desarrollado para evaluar el rendimiento de un sistema de protección. Los dispositivos sobrecorriente y de distancia y la protección de falla a tierra son normalmente simuladas juntos, como un sistema. Una simple expresión lógica del contacto une los relevadores de cada panel de relevadores, que nosotros 139 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” llamamos una zona local de la protección. Un disparo del interruptor de la señal cuando la expresión lógica se hace realidad. Los modelos detallados de los relevadores de CAPE son la clave para el realismo de la simulación. Con el Simulador de Sistemas usted camina a través de la de simulación de cualquier falla y ve las respuestas del dispositivo gráficamente y en informes textuales. Primero. Después de haber iniciado CAPE cómo ya se explico anteriormente, se puede contar con la base de datos de ejemplos y el dibujo de la red adjunto. Haga click en Cape Modules y System Simulator para moverse al módulo de SS. Arrastre el separador de barras que separa el texto y gráficos de áreas y el árbol de datos para ajustar el tamaño de ventana que desee. Presione, mantenga, y libere el botón 1 del ratón sobre una barra de división. Presione F5 para actualizar el esquema. Ajuste la ampliación del diagrama unifilar tal como se explicó anteriormente. ¿Cómo funciona el simulador? Simulando el sistema de protección es casi trivial en CAPE. Aplicar la falla de interés en el diagrama unifilar y mire cómo responde el diagrama. Pida los informes del texto si usted quiere los detalles. El simulador del sistema funciona de la siguiente manera: Se aplica una falla en algún lugar del diagrama unifilar. SS examina la región en torno a la falla y reúne todos los dispositivos de protección que se encuentran en un conjunto que llamamos simulación de área. Piense en esto como una ventana alrededor de la falla. Las opciones del programa de control del tamaño de dicha ventana, es decir, a qué distancia de la falla SS simula los dispositivos de protección. SS calcula la tensión y entradas de corriente a cada elemento del dispositivo para determinar si funciona el elemento y cuando lo haría. Esto le sirve a SS para determinar qué interruptores recibirán el error de señales (incluyendo el impacto de la supervisión) y el tiempo de esas señales se les dará. El interruptor más rápido se abre y la simulación se detiene. 140 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Durante la pausa, el diagrama unifilar muestra los tiempos previstos de apertura del interruptor y los elementos que causan el error. Puede hacer click en el diagrama para obtener los pop-ups con útiles informes impresos. Cuando esté listo, le dice a SS a seguir la simulación. SS vuelve a calcular las cantidades de falla, pero ahora con uno o más interruptores abiertos. Los tiempos de funcionamiento previstos se vuelven a calcular para los relevadores restantes (incluyendo el efecto de parcial previa operación), el interruptor siguiente vuelve a operar y es abierto, y la simulación se detiene de nuevo. Usted puede repetir este ciclo hasta que la falla esté desactivada. Antes de comenzar la simulación, usted puede preparar su red quitando líneas, generadores, etc., del servicio y mediante la desactivación de interruptores. Usted puede dirigir SS para volver a realzar un reciente o apertura del interruptor después de un tiempo muerto especificado, o hacer una pausa y cambiar el tipo de falla. Simular la respuesta inicial de una falla a tierra. Usted comenzará ejecutando una simulación cuya área de simulación abarca un solo nivel de protección de respaldo. Eso demostrará la técnica de steppedevent. Entonces usted ampliará el área de simulación y "encuentre" una mala operación causada por un relevador más alejado que se ha colocado de forma incorrecta. 141 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Ajusta su pantalla para que el diagrama unifilar muestre toda la línea de 183 Winder a 177 Center; lo que significa que usted debe mostrar la parte inferior izquierda del diagrama hasta que se parezca que la imagen de arriba. Usted puede ajustar el tamaño de fuente y el formato texto con la herramienta de formato de texto. (Es posible que tenga que activar esta herramienta en el menú View). Haga click en Winder – Center line, más cerca del centro que a Winder. Esto le da un menú de las acciones posibles para esa línea. Elija Fault Simulation|Midline. Pop-up le pedirá que hacer con los cambios preexistentes de la red que usted haya hecho. Usted no ha hecho ninguna, por lo que la respuesta, no importa. Haga click en aceptar, para aceptar la respuesta predeterminada. Entonces elija la falla Single_Line_Ground. Arrastre la línea media de distancia hacia la izquierda, a 0.01 (1% de 177 Center) y haga click en aceptar. Eso es todo. La simulación comienza automáticamente. Habrá una breve demora mientras SS encuentra los relevadores alrededor de la falla. Un estado de pop-up te mantendrá informado de lo que está sucediendo. Esta ventana emergente desaparece cuando finaliza la simulación de cada elemento de SS. Este es el final del primer evento. SS hace una pausa para dejar que nos fijemos en los informes. El diagrama unifilar mostrará la ubicación de la falla, el primer interruptor está previsto para abrir, y en los tiempos previstos los interruptores acabarán de abrirse en todos los lugares cuyos relevadores fueron simulados. Debajo de cada tiempo de apertura podrás ver uno o más códigos de la lógica de los elementos. Las etiquetas de user-assigned nos dicen qué elemento(s) funcionaron para causar el error local. Por ejemplo, aquí el código de la lógica DIR_GND_IOC sugiere que un elemento direccional instantáneo de tierra y un 142 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” elemento de sobrecorriente causaron que el interruptor dispare en 0.058 segundos. Ahora mire el extremo opuesto de esta línea, en el bus 183 Winder. No se ha abierto aún el interruptor, pero algo con un código de la lógica de DIR_GND_TOC se prevé que se debe hacer para abrir el interruptor en 0.525 segundos. Esto es probablemente un elemento tiempo de sobrecorriente direccional de tierra, verificar con los informes de abajo. Es importante que usted pueda darse cuenta de que todas las veces que se predijo para la condición del primer evento: el de la falla de línea a tierra en el 1% hacia afuera del centro y antes de que cualquier interruptor se abra. Quizá la predicción inicial no sea lo que realmente sucede. Examinar los informes. SS ofrece cinco tipos de informe para darle diferentes niveles de detalle sobre lo que está sucediendo. Pronto nos ocuparemos de tres de ellos. Usted puede solicitar cualquier informe o bien en el menú de Reports o haciendo click derecho en el diagrama unifilar, lejos de un objeto, y la elección de " Reports". Vamos a empezar con un resumen. Haga click derecho en una parte clara del diagrama unifilar y elija Reports|LZOP Summary. La siguiente ventana le mostrará las respuestas iniciales previstas (todos los LZOP del panel de relevadores) en el área de simulación. Ellos están ordenados del más rápido al más lento. El código del elemento que causa la señal de error, el tiempo de las señales que se le dará (en "LZOP"), el tiempo que tarda el interruptor para abrir (extinción del arco), y el tiempo total que sea mencionado. Puede ser reconfortante observar que las dos primeras operaciones implican los dos LZOP primarios. Luego elija Cancel el informe. 143 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” A continuación, vamos a ver qué sucede en el extremo de la línea con los primeros errores en, 177 Center. Haga click derecho cerca del final de Center y Center - Winder Line. Seleccione informe de síntesis de los elementos. Si se desplaza un poco hacia abajo, debería ver el siguiente informe. Éste es ancho debido a que toda la información necesita ser demostrada. Observe el elemento de contacto con el código de la lógica DIR_GND_IOC. Éste es el que causa el error. Mire cuidadosamente el informe del elemento de retransmisión. Observe que no comienza a operar hasta 0.017 segundos después de que se produce de la falla y que opera (el código de la lógica se convierte en "true") a 0.033 segundos. Puede que ya hayas adivinado la razón de la demora en el inicio - que es supervisado por un elemento de dirección, que deben funcionar en primer lugar. Ese elemento se informa en la línea inmediatamente superior. Como era de esperar, ese elemento DIR empieza a responder inmediatamente y opera a 0.017 segundos, el momento en que el elemento de la COI comienza a operar. Si alguna vez se trata de la operación (o no operación) de un relevador, se puede obtener un informe muy detallado para el relevador. Ponga el cursor del ratón en cualquier parte la línea en que dicho elemento, en este caso, el elemento DIR y haga click con el botón izquierdo del ratón. CAPE anexará un informe detallado de las operaciones de ese elemento. (Es posible que desee ajustar las fronteras del pop-up.) 144 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Observe la mitad inferior del informe. Éste elemento es de doble dirección polarizada. El fabricante, los límites individuales publicados en el de explotación y de cantidades de polarización, su producto, y la combinación de recogida del producto cuando es de doble polarizado. CAPE modela de todo esto. Por último elija Cancel informe. Continuar la simulación. La falla no se despeja todavía. Haga click en Continue Simulation en la barra de acción. La aplicación de la falla sigue siendo la misma pero ahora un interruptor está abierto. El cómputo del segundo acontecimiento es mucho más rápido que antes, porque CAPE tiene toda la información que necesita el relevador. 145 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” El diagrama unifilar muestra una nueva serie de interruptores con tiempos previsto de apertura. También muestra que el interruptor al final de WinderCenter de la línea se ha abierto para solucionar la falla. Sin embargo, no se abrió en el momento que se predijo por primera vez, el tiempo previsto anteriormente fue de 0.525 segundos, pero el tiempo "Real" resultó ser de 0.125 segundos. El elemento de sobrecorriente instantánea operó en su lugar de otro. Inicialmente, el elemento de IOC no vio la falla. Cuando el interruptor remoto se abrió, las corrientes de falla se redistribuyen, aumentando suficiente la corriente en el elemento de IOC para hacerlo funcionar. Si usted quiere explorar un poco, haga click derecho en cualquier extremo de línea con un tiempo de apertura previsto y haga click en Element Summary Report. O bien, haga click derecho en el diagrama de distancia de cualquier objeto, haga click en Reports, y elija uno. Amplíe el área y la repetición de la simulación. La base de datos que está utilizando tiene un relevador descoordinado intencionadamente, pero la simulación de usted acaba de ejecutar no lo tomó. Evidentemente, el tamaño del área de simulación puede ser crucial para observar o no una descoordinación que está al acecho. Nuestra primera simulación Simulation_Depth utiliza el valor predeterminado de 1. Esto significa un nivel de la protección de respaldo. SS recoge en todos los relevadores de los extremos de la línea de falla (nivel 0) y a continuación, sale un bus real de distancia de cada extremo (nivel 1) y se reúne en estos dispositivos también. Cargue el tap y la unión de buses que no tienen interruptores de protección y se omiten. Una mala operación también puede ser causada por corrientes de secuencia cero inducidas en las líneas mutuo junto a las líneas cerca de la falla. Son fáciles de perder. Por lo tanto, hay una opción similar llamado Mutual_Depth que determina cuántos acoplamientos mutuos SS se cruzan, ya que construye su área de simulación. Por default Mutual_Depth es 0. Si fuera 1, SS saltarían a cualquier línea directamente acoplado a una línea en el área de simulación y se reúnen en la protección dispositivos que se encuentran en los extremos de esa línea. Si Mutual_Depth se establece en 2, SS se va a las líneas de dos conexiones fuera de las líneas originales. 146 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Haga click en Preferences en la barra de acción. Establezca opción Mutual_Depth a 1 y haga click en aceptar. La línea de 230 kV de 177 a Center 154 de Gansvle2c230 estaba en nuestra área de simulación original. La línea de 115 kV de 178 Center a 179 de Commerce se junta mutuamente a ella y no estaba en el área de simulación. Será ésta vez. Haga click en Repeat Simulation en la barra de acción. El pop-up nos dice que la zona de simulación ahora tiene 770 elementos, el doble que antes. Cuando se detiene la simulación brevemente, note que los tiempos previstos ahora aparecen en la línea juntada, Commerce 179 a 178 Center. Haga click en el diagrama lejos de los objetos y elija Reports|LZOP Summary. Esta vez, el respaldo LZOP en Commerce se informa en la segunda lista, justo después de la ubicación a la que acaba de abrirse. De hecho, el informe dice que el interruptor de Commerce ha comenzado a operar. Está demasiado atrasado para que cualquier cosa lo detenga. Un elemento con el código GND_IOC de la lógica de sobrecorriente direccional instantánea, es el culpable. Y por último elegir Cancel informe. Haga click en Continue Simulation en la barra de acción. El diagrama nos dice que el interruptor en 179 Commerce es el próximo en abrir, como se esperaba. 147 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Hay un informe resumido de los eventos que no se han estudiado aún, pero que pudieron ser instructivos. Haga click lejos de los objetos y elija Reports|Event Summary. Este informe le dice que tiene una mala coordinación y le muestra que es más rápida la operación de respaldo de LZOP que la operación primaria de LZOP. Y con esto puede comenzar a apreciar el valor de esta herramienta. Puede estudiar cualquier condición de falla, incluyendo las fallas con impedancia, en múltiples fallas de bus, y fallas simultáneas que pueden suceder en la realidad. Los relevadores del módulo de CAPE realizan este mismo tipo de estudio, sólo funciona automáticamente, sin pausas, y se aplica tal vez cientos de faltas, ya que busca malas coordinaciones. AÑADIR UN RELEVADOR DIGITAL. La base de datos del CAPE es un depósito de red y protección de datos para el análisis, así como otros datos que mantener para el mantenimiento de registros. Mientras que usted puede construir y mantener sus datos directamente con el editor de bases de datos, es probable que prefiera utilizar más la interfaz gráfica del diagrama unifilar en el módulo CAPE. Para nuestro ejercicio de edición de datos, vamos a añadir un relevador digital a nuestra red de ejemplo. Dado que la mayoría de los usuarios ya disponen de datos de la red cuando adquieren CAPE, añadiendo la protección de datos será más informativo para usted ahora. Antes de colocar un relevador, primero añade sus fuentes de corriente y voltaje (un CT y VT) y un panel para sostenerlo. Llamamos al panel de una zona local de protección, o "LZOP" para 148 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” el cortocircuito. El acceso a todos los dispositivos de protección es a través del símbolo del interruptor. Primero. Si usted ha comenzado CAPE, cómo ya se explicó, tendrá nuestra base de datos de ejemplos, (cape.gdb) y el dibujo de la red (cape.gf) adjunto. Haga click en Cape Modules y One Line. Su ventana de OL se organizará similar a la imagen de la pantalla a continuación. La principal diferencia entre éste y los módulos CAPE es la presencia de dos barras de herramientas especiales: la barra de herramientas de la red y la barra de herramientas de protección. Ambos son barras de acoplamiento que puede arrastrar a otros lugares en la pantalla, más popularmente el lado izquierdo. Vamos a utilizar la barra de herramientas de protección en este ejercicio porque es el más rápido y la forma natural para agregar dispositivos de protección. Sin embargo, también puede agregar la protección de Data Tree y desde el Database Editor. Use cualquier método. Los formularios de entrada de datos son los mismos. Cuando la adición de protección, usted querrá que el diagrama unifilar mostrará dónde hay dispositivos existentes. Haga click en el diagrama, lejos de cualquier 149 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” objeto, y seleccione Change displayed text en el menú contextual. Luego haga click en Show Protection Information|OK en pop-up. Centre el diagrama en el bus "AIRLINE 115". Una manera fácil de para hacer esto con una gran red desconocida está a la derecha, haga click en el diagrama de nuevo, lejos de cualquier objeto. Seleccione FIND A BUS OR SUBSTATION en el menú contextual y el uso del formulario de búsqueda que resulta encontrar un bus, por ejemplo, "air" en su nombre. Para añadir cualquier cosa al sistema de protección, el procedimiento es siempre el mismo: haga click en una vez en dicho objeto en la barra de herramientas de protección y luego mover el cursor en el área de dibujo. Los símbolos del interruptor se encienden automáticamente, si es necesario. La ayuda flotante le dirá qué hacer a continuación. Mayoría de las veces que se haga click en un interruptor asociado con el dispositivo que están haciendo. Algunas veces usted puede hacer click en un bus en lugar de otro, como cuando se coloca un VT del bus. Si hace un click aparecerá el formulario de datos, si usted está poniendo un relevador, en primer lugar, puede surgir una forma que le solicitará que seleccione el LZOP (panel de relevador) en cuál ponerlo. Cuando el formulario de datos aparece, introduzca los datos en los campos marcados con rojo. Eso es todo lo que hay que hacer. Para examinar o editar los datos más adelante, haga doble click en el interruptor. El pop-up contiene un pequeño árbol de búsqueda desde el que puede seleccionar cualquier dispositivo en esta ubicación. 150 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Añadir un VT. Necesitaremos un VT del bus. Si el símbolo VT no es visible en la barra de herramientas de protección, haga click con la flecha hacia abajo demostrada para abrir el menú completo de los transformadores de instrumentos. Escoger el símbolo de VT, pero luego suelte el botón, no lo suelte hacia abajo. El cursor se ha convertido en un símbolo de VT. Muévalo sobre "265 AIRLINE 115"del bus. Cuando la etiqueta del cursor cambia al "bus", haga click en el bus. La forma de datos VT aparecerá, como se muestra a continuación. Su forma estará vacía. Usted notará que algunos campos tienen una etiqueta roja. Éstos son los datos requeridos. Observe también que los datos del VP en CAPE se dividen en bobinas primaria y secundaria. Hay un bus de VT con devanado primario, pero puede haber varios secundarios. Vamos a introducir dos: un trifásico, el secundario conectado en estrella-delta (no necesita el relevador en este ejercicio). Para los datos primarios, seleccione VT Estilo de catálogo 115kV PT de la lista desplegable (es el primero). A continuación, seleccionar un Tap primario de 69,000.00 y una conexión primaria Wye (estrella). 151 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Es opcional utilizar los estilos del catálogo de VT, que se almacenan en la biblioteca de la base de datos de CAPE, podría simplemente haber incorporado el valor de 69000 desde el teclado. A continuación, agregue dos secundarios al VT. Haga click en el botón Add Secondary (agregar secundario) y rellene los cuatro campos de datos como sigue, usando las casillas desplegables en su caso: Secondary Name 3PH Style Y Wdg-115kV PT Tap Used 69 Connection: Wye Usted puede dejar " Primary Phase Lead " como cero. Haga click de nuevo en el botón Add Secondary para agregar el otro secundario, con los siguientes datos: Secondary Name 3V0 Style X Wdg-115kV PT Tap Used 115 Connection: Broken Delta Haga click en la casilla para guardar las entradas. Los valores individuales para los taps primarios y secundarios no son importantes por sí mismos, lo único que importa a CAPE es la razón. Los dos VT secundarios son equivalentes a 1000:1 y 1000:1.667 (600:1). La forma VT se cierra automáticamente y el diagrama unifilar en la pantalla indica que el VT ahora con dos buses tiene las conexiones disponibles. Añadir un CT. El relevador va a proteger la línea de Airline a la subestación Bio. Tenemos que añadir un terminal de línea CT en el extremo de aerolíneas. Así que, esta vez, haga click en el CT símbolo en la barra de herramientas de protección para resaltarlo, no sujete el botón de ratón hacia abajo. Mueve el cursor sobre el símbolo de interruptor en 265 AIRLINE 115 en la línea del bus 174 BIO 115. Cuando el cursor se dice "Breaker", haga click en él. El Formulario de datos del CT a continuación aparecerá. (La tuya es vacía; la de CAPE muestran los datos previstos.) 152 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Note cómo la forma ya muestra el autobús y la ubicación cerca de la línea. Entrar en el equipo en forma arbitraria con el nombre de 123.209 y una designación del CT del lado del Bus. Luego, utilizando la lista desplegable estilo de lista, seleccionar el estilo del CT en primer lugar, 1200/5amr. Uso de la lista desplegable de conexiones CT, seleccione Y. De la lista caída de CT Ratio, seleccionar un valor de 600,00 (que es de 120 / 1). No era necesario haber elegido un estilo de en el catálogo de CT, que se almacena en el lado de la biblioteca de la base de datos de CAPE, que podría muy fácilmente haber entrado en el valor de 600 directamente en el campo de la relación del CT. Deja la polaridad CT como +. Deje la función CT, por default en el de terminal, este campo es donde se indican que un transformador está en una fase neutral o devanado delta. Cuando usted ha incorporado estos datos, el formulario debe ser similar al siguiente. Para guardar el CT de la línea, haga clic en el cuadro. Esto cierra la forma y actualiza el diagrama unifilar en la pantalla. Añadir una LZOP. En CAPE, un dispositivo de protección deberá ser colocado dentro de la llamada zona local de protección. (Piense en una LZOP como un panel de relevadores responsable de los interruptores de disparo en particular). Su 153 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” relevador protege la línea de Airline de Bio, por lo que se necesita un LZOP en la subestación de AIRLINE. Haga click en el símbolo LZOP en la barra de herramientas de protección para destacarla, no sujete el botón del ratón hacia abajo. Mueve el cursor sobre el símbolo de interruptor en el 265 AIRLINE 115 en la línea del bus 174 BIO 115. (La nueva LZOP controlará éste interruptor.) Cuando el cursor dice "Breaker", haga click en él. Ésta vez una intermedia pop-up aparece en lugar del formulario de datos de CAPE, porque necesita saber si desea agregar una nueva LZOP o simplemente añadir el interruptor haciendo click a éstos, controlados por algunos LZOP existentes. Haga click en el botón radio para crear un LZOP nuevo. Ésta elección activa otros botones de la misma forma. Haga click en el botón de radio Create a new LINE LZOP seguido de dar click en el botón aceptar, para crear una línea nueva de LZOP. Se podría haber evitado la forma anterior por completo haciendo click en el símbolo LINE LZOP de la barra de herramientas, como se muestra en la 154 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” siguiente figura. Así las cosas, hemos hecho click en el símbolo genérico de LZOP. La zona local de protección de datos aparecerá. Introduzca el nombre de Bio 115 line. Se trata de todos los datos que usted necesita por ahora. La expresión lógica importante es LZOP sólo para la simulación de sistemas y la comprobación de los relevadores. Se refiere a una expresión lógica definida en otra tabla que describe cómo los relevadores en ésta LZOP funcionan juntos para disparar el interruptor. Haga click en el botón para guardar la LZOP. El formulario se cierra y se actualiza la pantalla del diagrama unifilar. Agregue y conecte un relevador. Ahora que usted ha definido un LZOP para sostener relevadores, un VT y un CT, para medir el sistema de voltajes y corrientes, que están listos los relevadores para "instalar". Hemos escogido un dispositivo digital con cuarenta ajustes, a pesar de que los relevadores digitales a menudo tienen cientos de ellos (¡o peor!). 155 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Haga click en el símbolo del relevador en la barra de herramientas protección de para poner de relieve que, no lo sostenga el botón del ratón abajo. Mueve el cursor sobre el mismo interruptor símbolo en 265 AIRLINE 115 como antes. Cuando el cursor dice "Breaker", haga clic en él. El dispositivo de protección de datos para los relevadores aparecerá como se ilustra en la siguiente figura. Se tienen la LZOP ya seleccionado, porque sólo hay una que define los errores del interruptor que selecciono. Como siempre, nos centramos en los campos marcados con rojo. CAPE eligió un defecto LZOP de 1.0. Esto distingue a los relevadores múltiples del mismo estilo y es usado como el orden de presentación de informes en el módulo de producción de orden. Puede introducir cualquier número real si así lo desea. Introduzca un Nombre del dispositivo de 618ZDG. Usted puede dejar en blanco el grupo activo de campo, como su sello negro implica. Esto se refiere a la característica Configuración de la Variante de grupo que le permite almacenar más de un grupo de valores de un relevador, aplicados e históricos. Para seleccionar un relevador de la biblioteca de CAPE, haga click en el botón Select Style. La búsqueda del relevador aparecerá. Trabajo desde la izquierda, haga click en el fabricante en la opción en la primera columna y, a continuación, seleccione SCHWEITZER. De los próximos tres listas, haga click en el Tipo de relé, modelo y estilo (incluso si ya están resaltados): SEL-pg10, SELPG10, y SEL-pg10-00. En este punto, el buscador va a desaparecer, y el seleccionador de estilo aparecerá en la forma de datos de relevadores (como se muestra a continuación). Seleccione Demo para el sistema. Ahora, el relevador debe estar conectado a los transformadores de instrumentos. Haga click en la ficha Elements, que muestra los elementos de relevador en el modelo SEL-pg10 (unidades instantáneas, unidad de tiempo de sobrecorriente, las unidades direccionales, unidad de distancia, y temporizadores). Si conecta el relevador a un CT y VT, éstos elementos estarán en funcionamiento en CAPE. En primer lugar, haga click en el botón etiquetado Connect Op CT y seleccione el VT secundaria con nombre 3PH. Por último, haga click en el botón Connect Pol VT y seleccione la entrada llamada 3V0 (utilizado por el elemento direccional 32D). La lista de elementos muestra las conexiones de funcionamiento y las cantidades de funcionamiento del CT. 156 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Nota: Usted es libre de hacer click en el botón en cualquier momento durante la entrada de datos. Sin embargo, al hacerlo se cierre el formulario desde que se está agregando el relevador a través del diagrama unifilar. Para obtener de nuevo la edición, haga doble click en el interruptor y busque a través de la LZOP los dispositivos de protección. Ajuste el relevador. La mayoría de los relevadores digitales modernos tienen un gran número de ajustes, algunos de los cuales afectan a más de uno de los relevadores. Para simplificar el acceso a la configuración, los modelos de relevadores digitales de CAPE tienen todas las la configuración en un solo lugar. Haga click en la pestaña Common Taps para ver forma en ésta parte del relevador. Hay tres tipos de taps: el numérico, el de texto, y de información. Se ha establecido relevadores Schweitzer antes, se le reconocen algunos de los nombres de ajuste. A medida que botón sugiere la configuración de I/O, CAPE puede tomar en la configuración del software del relevador de muchos fabricantes. En este ejercicio, veinte ajustes de taps se introducen manualmente. Haga click en el nombre del parámetro y responder en el pop-up estableciendo un tap. Algunos ajustes pueden tener valores que son continuas o incrementales dentro de un rango definido, y otros pueden tener sólo valores discretos que pueden ser seleccionados de una lista. Para reducir este ejercicio, vamos a introducir sólo los ajustes que afectan a la respuesta de este relevador a las fallas. Utilice ésta tabla como guía e introduzca los ajustes siguientes para el PG10: 157 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Haga click en la casilla para guardar el relevador en su totalidad. La mitad inferior de la forma debería tener este aspecto: Usted ha puesto el relevador, conectado a un V T y CT, y lo fijó. Es operacional ahora para el uso en CAPE. ESTUDIO DE INTERRUPTORES. El módulo del interruptor de servicio de CAPE clasifica los interruptores s egún los estándares de ANSI/IEEE y el estándar del IEC 909. Sus métodos y uso se describen muy bien en la guía de usuario del interruptor de servicio de CAPE a que usted puede tener acceso del menú de ayuda de CAPE. Dentro de la norma de clasificación ANSI / IEEE, se ofrece apoyo para los interruptores de grado dentro de la base de "corriente simétrica" de acuerdo a IEEE C37.010-1999 y IEEE C37.04-1999, y para los interruptores de grado dentro de una "corriente total", de acuerdo con ANSI C37.5-1979 y ANSI C37.6-1971. El método de cálculo de corriente de cortocircuito IEC es algo diferente del Método ANSI, por lo que se refiere al análisis de grado del interruptor. El 158 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” método IEC se describe en la norma IEC 909. La estructura del número de interruptores para los interruptores de IEC descrito en la norma IEC 56. Este ejercicio le mostrará la colección de las dos formas en que la información de catálogo simple se almacena en sobres los distintos modelos de interruptores. También le mostrará el sistema de forma donde se representa un caso particular de un relevador. Entonces se le mostrará la forma de analizar y generar informes automáticos. Primero. Inicie CAPE, como ya se explicó. Cuando la sesión de la forma de instalación aparece, Asegúrese de hacer click en el botón de radio para la IEC, si deseen evaluar las puntuaciones del interruptor de acuerdo a las normas IEC. Después haga click en aceptar, Build SC Network tendrá nuestro ejemplo base de datos y la red de dibujo adjunto. Haga click en Cape Modules y Breaker Duty para pasar al módulo de BD. Arrastre las barras del divisor que separan el texto y las áreas de los gráficos y el árbol de los datos para ajustar los tamaños de la ventana como usted lo requiera. Presione, sostenga el botón 1 del ratón de liberación en una barra del divisor. Presione F5 para actualizar el diagrama. Ajuste la ampliación del diagrama unifilar, como se explicó anteriormente. Biblioteca de datos de los interruptores. Un interruptor para el análisis debe existir como un modelo en la biblioteca de la base de datos y también debe ser representado más específicamente en la base de datos del sistema. La base de datos que ha anotado, cape.gdb, incluye dos modelos de catálogo del interruptor y un ejemplo de un sistema de interrupción. Estos serán utilizados para ejecutar el simple estudio aquí. Inicie el Editor de bases de datos, haga click en Cape Modules y Database Editor. Desde la Biblioteca, haga click en el menú de Breaker Catalog. Usted verá esta lista de modelos de la biblioteca. 159 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Seleccione el modelo del interruptor ATB 230-25 y haga click en View Data en la parte inferior del formulario. Cuando el catálogo datos del interruptor aparece, seleccione la IEC vista de formulario. Observe cómo diferentes campos de datos están con etiqueta roja en función de si usted eligió ANSI / IEEE o IEC. Las normas requieren diferentes datos, los campos de negro son para los propósitos de registros. El significado de cada campo se explica en la guía del usuario del interruptor, que puede acceder desde el menú Help de CAPE. Hay una segunda forma y más pequeña, en la que la colección de cualquier número de secuencias de cambio de cierre puede ser definida y almacenada. Es necesario los cálculos para ANSI / IEEE. Usted puede acceder a él desde el menú de Biblioteca de la DBE, si desea verlo. 160 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Datos del sistema de interruptores. Para ver dónde el modelo GE ATB 230-25 es utilizado en el sistema, haga click en el botón Show System Breakers en la esquina superior derecha de la forma de catálogo del interruptor. Se usa sólo una vez en nuestra base de datos de ejemplo muy simple, haga click en la entrada de la subestación CENTER para moverse al sistema de datos importante del formulario. La forma de arriba muestra los datos introducidos por un interruptor de línea en un interruptor y medio régimen. En este caso, el interruptor es responsable de las dos ramas se describe en la "Sección 1" y "Sección 2" - "177 175 1" y "177 183 1". El campo Tipo Breaker es quizás el campo en el formulario más importante, ya que define el entorno físico del interruptor en su red. Su elección determina el conjunto de fallas que CAPE debe aplicar en su modelo de sistema de lógica para evaluar el interruptor. 161 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Realizar un análisis del servicio de interrupción. Para evaluar este interruptor particular, ahora debería volver al módulo de servicio de interrupción. Cierre todas las ventanas visibles del editor de la base de datos. Antes de ejecutar un análisis, tendrá que mirar las opciones que ofrece el Breaker Módulo de Guardia. Haga click en Preferencias en la barra de acción y examinar las opciones en el local y las fichas de informes. Recuerde hacer click en el signo "?" Botón de ayuda para las explicaciones de las opciones que no son obvios para usted. A continuación, seleccione la ATB 230 - 25 interruptores en el centro. Haga click en Select Individual Breakers en la barra de acción y elegir el interruptor de esta forma: Usted puede, por supuesto, elegir el número de interruptores de otros, individualmente o en grupos. Ahora seleccionar de la barra de acción Perform Study (realizar estudio) para ejecutar un análisis en el interruptor seleccionado. Se observará un informe completo, que en parte se parece a esto: 162 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” Al examinar el informe, te darás cuenta de que este interruptor tiene márgenes de fallas de 65.4% y el 68.3% para los trifásicos y para los de línea a tierra, respectivamente. La Guía del usuario Breaker Duty 'incluye un minucioso análisis de cómo se deben evaluarse los interruptores de acuerdo con el IEC y ANSI. También se han examinado diferentes configuraciones de circuitos de interruptor y cómo se puede modelar situaciones especiales. Una explicación de todas las opciones disponibles también se encuentra en la Guía. 163 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” CONCLUSIONES Los relevadores electromecánicos juegan un papel muy importante en los sistemas de protección para sistemas de potencia. Estos relevadores son los utilizados en los sistemas de protección; sus diferentes curvas características tiempo-corriente hacen posible una fácil coordinación con otros mecanismos de protección. Los relevadores electromecánicos tienden a ser sustituidos por los relevadores digitales, pero estos tienen ciertas desventajas ante los electromecánicos, las condiciones ambientales tales como la temperatura, humedad y polvo influyen en el óptimo funcionamiento de estos relevadores. Después de analizar las diferentes formas de funcionamiento de los relevadores y también de estudiar lo básico acerca de las protección de líneas de transmisión se llega a la conclusión de que se necesita un laboratorio para realizar las prácticas de protecciones a sistemas de potencia a través del software CAPE, ya que sería más didáctico para los estudiantes de la Facultad de Ingeniería Mecánica Eléctrica porque tendrían la oportunidad de hacer simulaciones sobre los ejercicios que en clase se proponen, además de que las oportunidades de trabajo serían mayores ya que se tendría un conocimiento más amplio acerca de los programas de cómputo. 164 “Aplicación del software COMPUTER AIDED PROTECTION ENGINEERING (CAPE) en protecciones a sistemas de potencia” BIBLIOGRAFÍA AGAPITO MENDOZA ROMERO: PROTECCIÓN POR RELEVADORES A SISTEMAS DE POTENCIA. C. RUSSELL MASON: EL ARTE Y LA CIENCIA DE LA PROTECCIÓN POR RELEVADORES; CECSA, MÉXICO 1977. B. RAVINDRANATH, M. CHANDER: PROTECCIÓN DE SISTEMAS DE POTENCIA E INTERRUPTORES; LIMUSA, MÉXICO 1989. GILBERTO ENRÍQUEZ HARPER; FUNDAMENTOS DE PROTECCIÓN DE SISTEMAS ELÉCTRICOS POR RELEVADORESDE; LIMUSA, MÉXICO 1987. RAFAEL LOZANO GONZÁLEZ: PROTECCIONES DE SISTEMAS ELÉCTRICOS DE POTENCIA; TEXTOS UNIVERSITARIOS, XALAPA, VER. 1997. WERNERG. DOEHNER, LAURO CASTANEDO CONTRERAS, JOSÉ MÉNDEZ ZAVALA, PEDRO PABLO LÓPEZ CAREAGA, RICARDO RODRÍGUEZ HERNÁNDEZ, ALFONSO GRADOS JIMÉNEZ: ESQUEMAS DE PROTECCIÓN ELÉCTRICA; CENTRO EDITORIAL DE LA DIRECCIÓN GENERAL DE CFE, MÉXICO 1981. COMISÓN FEDERAL DE ELÉCTRICIDAD: RELEVADORES A SISTEMAS DE POTENCIA. PROTECCIÓN POR STEVENSON WILLIAM D.: ANÁLISIS DE SISTEMAS ELÉCTRICOS DE POTENCIA; MC GRAW HILL, MÉXICO 1985. http://www.es.wikipedia.org/wiki/Protecciones_de_sistemas_de_potencia http://www.gama.fime.uanl.mx/~omeza/pro/PROTECCION.pdf http://www.yse.com.mx/cordinacionprotecciones.shtml http://www.monografias.com › Tecnología http://www.quiminet.com/.../PROTECCION%2BELECTRICA.htm 165