Procesamiento Digital de Señales
Anuncio

Procesamiento Digital
de Señales
CE16.10L2
Tema 3. Operaciones en
señales en tiempo discreto
Operaciones básicas con señales
Operación Producto (modulación):
Operación de Suma:
Operación de Multiplicación:
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Operaciones básicas con señales
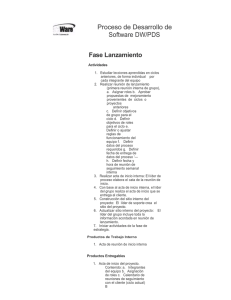
Operación de desplazamiento en tiempo:
y[n] = x[n − N]
donde N es un entero.
Si N > 0, es una operación de retardo
Unidad
de retardo
Si N < 0, es una operación de Avance
Unidad
de avance
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Operaciones básicas con señales
Operación de inversión en Tiempo (folding):
Operación de Ramificación: Es usada para
proporcionar múltiples copias de una secuencia.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo con operaciones básicas
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Sistemas Discretos
Un sistema en tiempo discreto procesa una secuencia de
entrada dada x[n] para generar una secuencia de salida y[n]
con propiedades mas deseables
En muchas aplicaciones, el sistema en tiempo discreto es
normalmente un sistema de una entrada sencilla, una salida
sencilla
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Clasificación de los Sistemas
Los sistemas en tiempo discreto pueden ser clasificados
en función de sus propiedades:
Discretos vs. Continuos
Lineales vs. No-Lineales
Invariantes al desplazamiento vs. Variantes al desplazamiento
Causal vs. No-Causal
Sin Memoria – vs. Con Memoria
Estables vs. Inestables
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Linealidad
Sea y1[n] la salida producida por una entrada x1[n] y sea
y2[n] la salida producida por una entrada x2[n]. Un sistema
es lineal, si las siguientes propiedades son satisfechas:
Esta propiedad se debe mantener para cualquier
constante arbitraria α y β, además para todas las posibles
entradas x1[n] y x2[n] o cualquier numero de entradas
posible.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo : Acumulador
Un sistema discreto cuya relación entrada/ salida es dada
por
y[-1]
la segunda forma es usada si la
señal es causal, en cuyo caso
es la condición inicial
Esta representación es conocido como un acumulador, donde
la salida en cualquier instante, es simplemente la suma de
todas las entradas hasta ese instante.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Invarianza al Desplazamiento
Un sistema es invariante al desplazamiento si
para toda m y n.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo: Muestreador Ascendente
Es un sistema cuyas carac. de entrada/salida pueden ser escritas como
es conocido como muestreador ascendente.
Lo que realiza este sistema es insertar L ceros entre cada muestra. Si
las muestras son insertadas basadas en sus amplitudes, entonces este
sistema es llamado interpolador
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Sistema Lineal Invariante en el Tiempo
Un sistema que satisface las propiedades de linealidad e
invarianza en el tiempo (desplazamiento) es llamado un
sistema LTI (linear time invariant).
Mas adelante veremos que este tipo de sistemas serán
muy importante en el procesamiento digital de señales:
Ya que son fáciles de analizar y caracterizar, por lo tanto fácil de
diseñar.
Algoritmos eficientes se han implementado para tales sistemas.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Causalidad
Un sistema es causal si la salida y[n0], en el instante n0
depende únicamente de las muestras de entrada x[n] para n
≤ no y no depende de las muestras de entrada para n > no
Son los siguientes sistemas causales?
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo: Muestreador Descendente
Un sistema cuyas características de entrada/salida
satisfacen
, donde M es un entero +, es
llamado muestreador descendente o decimador.
Este sistema reduce el numero de muestras por un factor M, es
decir removiendo M muestras entre dos muestras consecutivas.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Memoria y Estabilidad
Un sistema se dice sin memoria si la salida depende
únicamente de entrada actual, pero no de las entradas
pasadas ni futuras. De otra forma decimos que el sistema
tiene memoria.
Un sistema en tiempo discreto es estable si y solo si para
toda entrada acotada, la salida también lo es.
Si y[n] es la respuesta a una entrada x[n] que satisface
y y[n] satisface
, entonces se dice que el sistema es
estable en sentido BIBO (entrada, salida acotadas).
Un sistema (filtro) que no es estable no es de uso practico
(excepto para aplicaciones muy especificas) y por lo tanto la
mayoría de los filtros son diseñados en el sentido BIBO
estables.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
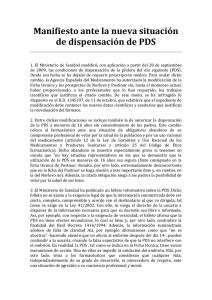
Ejemplo: Filtro de Promedio Movil
Promedio Móvil de M puntos:
Usada en suavizar variaciones aleatorias de
datos.
Una implementación directa del sistema de
promedio móvil de M-puntos, requiere M sumas, 1
división y almacenamiento de las muestras de
entrada pasadas.
Una implementación más eficiente es presentada
a continuación.
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo: Filtro de Promedio Movil
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
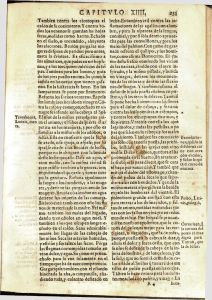
Ejemplo: Filtro de Promedio Movil
El calculo del sistema de promedio móvil de
M-puntos modificado usando la ecuación recursiva,
requerirá ahora 2 sumas y 1 división.
Una aplicación puede ser:
x[n] = s[n] + d[n],
donde s[n] es la señal contaminada con ruido d[n]
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
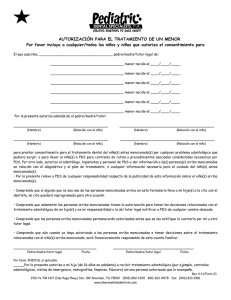
Ejemplo: Filtro de Promedio Movil
% Suavizado de la senal por un filtro de promedio
movil
R = 50;
d = rand(R,1)-0.5;
m = 0:1:R-1;
s = 2*m.*(0.9.^m);
x = s + d';
plot(m,d,'k-',m,s,'b--',m,x,'r:')
xlabel('indice de tiempo n','FontSize',14);
ylabel('Amplitud','FontSize',14)
legend('d[n]','s[n]','x[n]');
pause
M = input('Numero de muestras de entrada = ');
b = ones(M,1)/M;
y = filter(b,1,x);
figure
plot(m,s,'r-',m,y,'b--')
legend('s[n]','y[n]');
xlabel ('indice de tiempo n','FontSize',14);
ylabel('Amplitud','FontSize',14)
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
n=0:99;
s=2*(n.*(0.9).^¨n);
d=rand(1:100);
x=s+d;
subplot(211)
plot(x);grid
for i=7:100;
y(i)=(1/7)*sum(x(i-1)+x(i-2)+x(i-3)
+x(i-4)+x(i-5)+x(i-6));
end
subplot (212)
plot(n,y);grid
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
FIN
Procesamiento Digital de Señales (PDS)
Facultad de Ingeniería Mecánica, Eléctrica y Electrónica