Breve sobre el Polinomio de Taylor
Anuncio

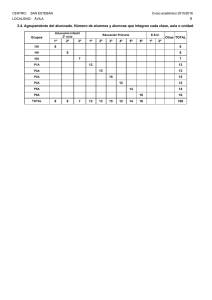
Breve sobre el Polinomio de Taylor Alejandro Lugon 23 de agosto de 2010 1. Funciones de R en R Consideremos la función f : R → R diferenciable en un conjunto S abierto. Por definición su derivada en un punto a ∈ S es: f (x) − f (a) lı́m = f 0 (a) x→a x−a a partir de lo cual podemos operar: f (x) − f (a) − f 0 (a) = 0 lı́m x→a x−a f (x) − f (a) 0 lı́m − f (a) = 0 x→a x−a f (x) − f (a) − (x − a)f 0 (a) lı́m = 0 x→a x−a ra1 (x) lı́m = 0 (1) x→a x − a donde hemos definido: ra1 (x) = f (x) − f (a) − (x − a)f 0 (a) reacomodando esta expresión tenemos que: f (x) = f (a) + (x − a)f 0 (a) + ra1 (x) (2) con ra1 (x) cumpliendo (1) 1.1. El polinomio Una lectura de la condición (1) es que cuando x tiende a a el resto ra1 (x) tiende a cero ”más rápido”. Desde otro punto de vista, podemos hacer ra1 (x) tan pequeño como queramos si tomamos x suficientemente cercano a a. Esto nos permite, a partir de (2), escribir: f (x) ≈ f (a) + (x − a)f 0 (a) (3) donde estamos aproximando a la función f alrededor de a (x cerca a a) por medio de un polinomio de grado uno, p1a (x) = f (a) + (x − a)f 0 (a). Como queda claro en la Figura 1.1 1 Figura 1.1 esta apróximación es aceptable para x cerca a a. Es fácil ver que f y p1a cumplen: f (a) = p1a (a) 0 f 0 (a) = p1a (a) El polinomio p1a es el Polinomio de Taylor de grado 1 de f alrededor de a y comunmente a la expresión (3) se le llama la linealización de f alrededor de a. Podemos pensar en mejorar la aproximación aumentando el grado del polinomio. Dada la función f definamos su Polinomio de Taylor de grado 2 alrededor de a como el polinomio p2a (x) = k0 + k1 x + k2 x2 que cumple: f (a) = p2a (a) 0 f 0 (a) = p2a (a) 00 f 00 (a) = p2a (a) Observando la forma de p1a (x) vemos que es más conveniente escribir el p2a (x) en una forma similar: p2a (x) = c0 + c1 (x − a) + c2 (x − a)2 para tener: f (a) = p2a (a) = c0 0 f 0 (a) = p2a (a) = c1 0 f 00 (a) = p2a (a) = 2c2 con lo cual: c0 = f (a) c1 = f 0 (a) f 00 (a) c2 = 2 y por lo tanto: p2a (x) = f (a) + f 0 (a)(x − a) + 2 f 00 (a) (x − a)2 2 (4) Si definimos ra2 (x) = f (x) − p2a (x) tendremos: f (x) = f (a) + f 0 (a)(x − a) + f 00 (a) (x − a)2 + ra2 (x) 2 (5) y también es verdad1 que: ra2 (x) =0 x→a (x − a)2 lı́m Figura 1.1 Como se ve en al Figura 1.1 esta aproximación es más precisa que con p1a (x). Evidentemente podemos ir más lejos y tener mejores aproximaciones considerendo polinomios de mayor grado, ası́ el Polinomio de Taylor de grado n de f alrededor de a es: pna (x) = f (a) + f 0 (a)(x − a) + f 00 (a) f 000 (a) f (n) (a) (x − a)2 (x − a)3 + . . . (x − a)n 2 3! n! o, de manera concisa: pna (x) = n X f (k) (a) k! k=0 para el cual el resto ran (x) = f (x) − pna (x) (x − a)k cumple: ran (x) =0 x→a (x − a)n lı́m 1.2. (6) Formas para el resto Hasta el momento hemos definido el resto simplemente como la diferencia entre el valor de la función y el del polinomio de Taylor. La expresión (6) nos da la idea que este resto es çontrolable”, podemos mantenerlo relativamente pequeño si no nos alejamos demasiado del valor a. Ahora vamos a dar otras formas de escribir el resto que son útiles en desarrollos posteriores. 1 Demostración que no haremos por el momento 3 Para lo que sigue fijaremos el valor de x y pensaremos que lo que estamos variando es el valor de a, para evitar confusiones llamemos a esta variable t, de esta forma tenemos al identidad f (x) = pnt (x) + rtn (x) Derivando a ambos lados respecto a t tenemos: 0= Calculemos d n d pt (x) + rtn (x) dt dt d n p (x): dt t n d n d X f (k) (t) pt (x) = (x − t)k dt dt k=0 k! d = dt f (t) + n X f (k) (t) k! k=1 ! (x − t)k n X d f (k) (t) (x − t)k dt k! k=1 n (k+1) X f k (t) f (t) k k−1 0 (x − t) − (x − t) = f (t) + k! (k − 1)! k=1 = f 0 (t) + = = n X f (k+1) (t) k=0 n X k=0 k! n X f k (t) (x − t) − (x − t)k−1 (k − 1)! k=1 k n−1 X f k̄+1 (t) f (k+1) (t) (x − t)k − (x − t)k̄ k! (k̄)! k̄=0 f (n+1) (t) = (x − t)n n! Luego tenemos que: f (n+1) (t) d n rt (x) = − (x − t)n dt n! Ahora, integrando a ambos lados desde t = x hasta t = a: Z a Z a (n+1) f (t) d n rt (x) dt = − (x − t)n dt dt n! x x Z a (n+1) f (t) ran (x) − rxn (x) = − (x − t)n dt n! x Z x (n+1) f (t) ran (x) = (x − t)n dt n! a La última igualdad, ecuación (7), es una de las dos formas del resto que daremos. La segunda es: ran (x) = f (n+1) (p) (x − a)n (n + 1)! para cierto p entre a y x. 4 (7) Funciones de Rn en R 2. Consideremos ahora f : Rn → R diferenciable en un conjunto S abierto. Para esta funciones tenemos las derivadas parciales2 : ∂ f (a + tei ) − f (a) f (a) = lı́m t→0 ∂xi t el vector gradiente: ∇f (a) = ∂ ∂ ∂ f (a), f (a), . . . , f (a) ∂x1 ∂x2 ∂xn y la matriz Hessiana de segundas derivadas: 2 ∂ f (x) ∂x21 ··· .. .. Hf (x) = . . ∂2f (x) · · · ∂xn ∂x1 ∂2f (x) ∂x1 ∂xn .. . 2 ∂ f (x) ∂x2 n El Polinomio de Taylor de grado 1 para estas funciones será un polinomio de n variables, dado por la fórmula: p1a (x) = f (a) + ∇f (a) · (x − a) donde · denota al producto interno de vectores. El resto ra1 (x) = f (x) − p1a (x) cumple ahora: ra1 (x) =0 x→a ||x − a|| lı́m El Polinomio de Taylor de grado 2 será: 1 p2a (x) = f (a) + ∇f (a) · (x − a) + (x − a)Hf (x)(x − a)T 2 donde T denota transpuesta, como (x − a) es un vector fila (x − a)T es un vector columna. El resto ra2 (x) = f (x) − p2a (x) cumple ahora: ra2 (x) =0 x→a ||x − a||2 lı́m Funciones de Rn en Rn 3. Consideremos ahora f : Rn → Rn diferenciable en un conjunto S abierto. Para esta funciones tenemos la matriz Jacobiana de priemras derivadas: ∂f1 ∂f1 (x) · · · ∂x (x) ∂x1 n .. .. .. Df (x) = . . . ∂fn (x) ∂x1 ··· ∂fn (x) ∂xn La linealización de f alrededor de a será: p1a (x) = f (a) + Df (a)(x − a)T 2 i e es el i-ésimo vector canónico. 5 Hay que observar que al igual f la linealización p1a (x) tienen valores en Rn y que la expresión Df (a)(x − a)T es el producto de una matriz y un vector columna. Por ejemplo para n = 2 tenemos: f1 (x) f (x1 , x2 ) = f2 (x) x − a = (x1 − a1 , x2 − a2 ) x 1 − a1 T (x − a) = x 2 − a2 # " ∂f1 ∂f1 (x) (x) ∂x1 ∂x2 Df (x) = ∂f2 ∂f2 (x) (x) ∂x1 ∂x2 luego: f1 (a) p1a (x) = + f2 (a) ∂f1 (a) ∂x1 ∂f1 (a) ∂x2 ∂f2 (a) ∂x1 ∂f2 (a) ∂x2 6 x 1 − a1 x 2 − a2