P - WordPress.com
Anuncio

Universidad Autónoma Gabriel Rene Moreno
Facultad de Ciencias Exactas y Tecnología
Carrera de Ingeniería Civil
Mecánica de los Materiales I
CIV302 “A” y “B”
Ing, Elías Guillermo Belmonte Clementelli
Santa Cruz de la Sierra – Bolivia
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
1
Unidad 1
Tensiones Normales y Cortantes simples en
sistemas Isostáticos.
1.1 Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes objetivos
trazados para el Estudio de tensiones normales y cortantes en sistemas Isostáticos.
1.
Definir y conocer que estudia la resistencia de materiales.
2.
Conocer y comprender las hipótesis básicas de resistencia.
3.
Definir que son las tensiones o esfuerzos normales y cortantes.
4.
Resolver problemas de elementos estructurales en sistemas Isostáticos.
sometidos a fuerzas normales y cortantes
1.2 Introducción
A diferencia de la Estática, que trata del estudio del equilibrio de las fuerzas que
componen un sistema, sobre cuerpo rígido, la Mecánica de Materiales se ocupa del estudio de
los efectos causados por la acción de cargas externas sobre un sólido deformable; analizando las
fuerzas y deformaciones que se producen en su interior, además de las relaciones que existen
entre ellas, permitiéndole al ingeniero , con base a estos análisis tomar decisiones acerca de los
materiales a usar, su tamaño y forma correcta de las piezas o elementos de un sistema dado,
además de tener la capacidad poder definir y concluir si una pieza o elemento es capaz de
resistir un sistema de cargas propuesto.
Sea un sólido deformable como muestra la figura, sometido a cargas externas.
P1
Pn
P6
P6
P3
P3
P5
P4
P5
P4
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
2
Lo que queremos conocer es que sucede en el interior del sólido deformable, respecto a
los las fuerzas y deformaciones en cualquier sección del mismo, de tal forma de poder definir el
material, tamaño y forma del sólido en otras palabras poder dimensionar el elemento.
Para dimensionar una pieza o elemento, es necesario que conocer de ellos tres
propiedades:
-
Resistencia
-
Rigidez
-
Estabilidad
Resistencia.- Capacidad que tiene el interior del sólido deformable de soportar cargas
antes de romperse.
Rigidez.-
Capacidad que tiene el interior del sólido deformable de contrarrestar
deformaciones.
Estabilidad.-
Capacidad que tiene el sólido deformable de mantener su equilibrio
estático.
1.3 Hipótesis básicas de resistencia de materiales.
1.3.1 Hipótesis de continuidad del material
Se supone que el material llena, totalmente el volumen que ocupa. La teoría atómica de la
composición discreta de la materia no se la toma en consideración.
Ejemplo: El Hormigón, es un material compuesto por otros materiales que son cemento,
arena, grava y agua y si se estudia por separado la resistencia de cada uno de los componentes
del hormigón sería demasiado complejo por eso se considera como un solo material llamado
continuo llamado Hormigón
-
Cemento
- Arena
-
Grava
-
Agua
Hormigón
σi , δi
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
3
1.3.2 Hipótesis de Homogeneidad
Se supone que el material tiene las mismas propiedades fisicas y mecánicas en todo su
volumen
Ejemplo: Dos testigos extraídos de un mismo material, todas sus propiedades físicas (color, olor,
peso, etc) y propiedades mecánicas (tensiones y deformaciones) tiene que ser las mismas.
1
2
1
2
Testigos
1.3.3 Hipótesis de Isotropía
Se supone que un material tiene las mismas propiedades físicas y mecánicas en todas sus
direcciones.
Ejemplo: Si comparamos un material acero, con otro material madera nos daría como
resultado que el acero sus propiedades físico, mecánicas son las mismas en todas sus direcciones,
en cambio el caso de la madera debido a su composición de sus fibras no todas sus propiedades
son las misma en todas sus direcciones como vemos en el esquema.
ACERO
Material Isótropo
Resiste igual en cualquier
dirección
MADERA
Material Anisótropo
No tiene la misma resistencia
en todas las direcciones
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
1.3.4
4
Hipótesis de Rigidez
Se supone que las deformaciones son pequeñas con relación a las dimensiones del cuerpo
deformado.
Ejemplo:
δ <<< L
δ
L
1.3.5
La deformación es mucho más
pequeña que la longitud
Hipótesis de Elasticidad perfecta
Se supone que todo sólido en estudio, recupera totalmente su deformación al retirar la
carga que produce dicha deformación.
Ejemplo:
1
P=0
δ=0
Estado Inicial: No tiene peso ni
deformación
L
P≠0
2
δ≠ 0
Estado de carga: tiene peso y se
deforma
L
3
P=0
δ=0
L
Estado de descarga: Se retira el peso
y el elemento
recupera su
estado inicial
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
1.3.6
5
Hipótesis de Dependencia lineal entre carga y
deformación
Se supone que existe una dependencia lineal entre la carga aplicada y la deformación
producida.
Ejemplo:
1
P=0
δ=0
L
P
P
2
δ
L
3
2P
δ
LEY DE HOOCKE
2δ
L
• Principio De superposición de Efectos
Se considera que el efecto producido por un conjunto de cargas externas a una estructura
es igual a la suma de los efectos producidos por cada una de ellas que componen el conjunto de
cargas externas.
0
1
P
M
P
RA0 = R1A + RA2 + RA3
M
R1A
3
+
+
=
RA0
2
R A2
R A3
M a0−a = M a1−a + M a2−a + M a3−a
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
1.3.7
6
Hipótesis de Bernoulli o de secciones planas
Se supone que las secciones planas trazadas perpendicularmente al eje de la barra, alejada
un poco en el punto de aplicación de la carga, en el proceso de su deformación, se mantienen
planas y perpendiculares a dicho eje.
δ
δ
P
1.3.
P
Hipótesis
de
Saint
Venant
o
Hipótesis
de
distribución uniforme de cargas.
Se supone que al aplicar una carga en una sección plana y perpendicular al eje la
respuesta en otra sección un poco alejada del punto de aplicación es una carga uniformemente
q=
a
b
a
b
b
P
A
b
P
a
a
P
P
Real
Hipótesis
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
7
1.4 Esfuerzos internos
1.4.1 Tensiones Normales
Sea un elemento sometido a fuerzas normales como muestra la figura:
a
a
Sección a-a
N
Lo que queremos saber es la respuesta interna que se presenta en cualquier sección
normal a la fuerza N como la sección a-a. Aplicando la Hipótesis de Saint Venant:
dN = σ * dA ⊥
a
a
dA
N
σ = Esfuerzo interno normal (TENSIÓN NORMAL)
N
N
0
0
∫ dN = ∫ σ * dA ⊥
N = σ * A ⊥ , entonces: σ =
N
A
⎡ Kg ⎤
⎢⎣ cm 2 ⎥⎦
La tensión normal es la carga aplicada que actúa perpendicularmente al área.
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
1.4.2
8
Tensión Cortante
Sean dos chapas unidas mediante un roblón o perno como muestra la figura:
P
a
a
P
Sección resistente
Lo que queremos saber es la respuesta interna que se presenta en la sección paralela a la
fuerza del roblón, aplicando la hipótesis de Saint Venant:
dP = τ * dA//
dA//
τ = Esfuerzo interno de corte (TENSIÓN CORTANTE)
P
P
0
0
∫ dP = ∫ τ * dA//
P = τ * A/ / , entonces: τ =
P
A
⎡ Kg ⎤
⎢⎣ cm 2 ⎥⎦
Tensión cortante es la fuerza aplicada a una sección paralela o transversal a ella.
Ejemplo 1:
Sea la estructura mostrada en la figura, sometida a esfuerzos internos normales, determinar las
distintas secciones que se presentan, considerando que la sección 1 – 1 es cuadrada y la sección
2 – 2 es circular.
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
9
Datos
a
n
2
σAdm =1200 Kg/cm
a
n
P1 = 20000 Kg
P2 = 5000 Kg
P1 = 20000 Kg
Sección n - n
o
Incógnitas
d
o
Dimensiones a, d
Sección o - o
P2 = 5000 Kg
Solución:
Aplicando σ =
N
A
y despejando A de la fórmula se tiene:
A ⊥=
N
σ Adm
Para la sección 2 - 2
N2 = 5000 Kg
o
o
Sabemos que:
N 2 = 5000Kg
σ Adm = 1200
P1 = 5000 Kg
A ⊥=
Kg
cm 2
π * d2
4
Reemplazando en la fórmula se determina el valor de “d”
π *d2
4
=
5000 Kg
4 * 5000 Kg
⇒ d=
, por tanto: d = 2.30cm
Kg
Kg
1200 2
π *1200 2
cm
cm
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
10
Luego la sección tendrá las siguientes dimensiones:
2,30 cm
Sección o - o
Para la sección 1 - 1
N1 = 25000 Kg
n
Sabemos que:
N1 = 25000Kg
n
P1 = 20000 Kg
σ Adm = 1200
Kg
cm2
A ⊥= a 2
P2 = 5000 Kg
Reemplazando en la fórmula se determina el valor de “a”
a2 =
25000 Kg
25000 Kg
⇒ a=
, por tanto: a = 4.56 cm
Kg
Kg
1200 2
1200 2
cm
cm
Luego la sección tendrá las siguientes dimensiones:
4.56 cm
4.56 cm
Sección n - n
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
11
Ejemplo 2:
Sea un sistema estructural que consta de 3 piezas unidas mediante pernos de 1 cm. de diámetro,
calcule el esfuerzo cortante que se produce en las secciones de los pernos.
Datos
c
φ = 1cm
d
n
n
P = 1000 Kg
n
n
o
o
P = 1000 Kg
Incógnitas
τn-n
τo-o
P
A
Solución: Aplicando τ =
Roblón Nº 2
Sabemos que: P2 = 1000 Kg.
A2 =
π *d 2
4
Reemplazando:
τ=
1000 Kg
⇒
π * (1cm )2
τ = 1273
Kg
cm 2
4
Sabemos que: P1 = 1000 Kg.
Roblón Nº 1
A2 = 2 A //
2 áreas de corte
A2 =
π *d 2
4
Reemplazando:
1000 Kg
τ=
2
π * (1cm)2
⇒
τ = 636
Kg
cm 2
4
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
12
Ejemplo 3:
Determinar los diámetros de las barras elásticas mostradas en la siguiente figura, además
dimensionar el pasador aplicado en el punto A.
Datos
n
σAdm. =1200 kg /cm2
τAdm =500 Kg/cm2
o
P1 =10000 Kg
Pasador
45º
P1 = 10000 Kg
P2 = 5000 Kg
∀
!
1.00 m
30º
Chapa Rígida
P2 = 5000 Kg
#
∃
1.00 m
2.00 m
Incógnitas
Dimensionar barras n y o
Dimensionar pasador
Solución: Representando el esquema isostáticamente:
∑M A = 0
P1 =10000 Kg
1000 * (1) − VC * (3) + 5000 * (4) = 0
VC
VC = 10000 Kg
HA
P2 = 5000 Kg
VA
1.00 m
∑ FV = 0
V A − 10000 + 10000 − 5000 = 0
V A = 5000 Kg
1.00 m
2.00 m
Para el punto #
n
∑F
=0
∑F
=0
V
N 2 sen30º + N 1 sen45º = 10000........( A)
o
H
VC = 10000 Kg
N1
45º
N 2 cos 30º = N 1 sen45º..................(B )
N2
30º
N 1 = 8965 Kg
N 2 = 7320 Kg
VC = 10000 Kg
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
13
Para las barras n y o:
Aplicando σ =
N
A
y despejando A de la fórmula se tiene: A ⊥=
π *φ 2
4
=
N
σ Adm
N
σ Adm
⇒ φ=
4* N
π * σ Adm
φ1 =
4 * 8965
π *1200
⇒ φ1 = 3.08 cm
φ2 =
4 * 7320
π * 1200
⇒ φ 2 = 2.79 cm
pero A =
π *d 2
4
Para el pasador:
Aplicando τ =
2
π *d 2
4
=
P
2A
P
τ Adm
y despejando A de la fórmula se tiene: 2 A // =
⇒ d=
2* P
π *τ Adm
⇒ d=
P
τ Adm
2 * 5000
π * 500
d = 2.52 cm
Luego las los diámetros de las barras elásticas y el pasador serán:
n
φ = 3.08 cm
o
d = 2.52 cm
45º
30º
φ = 2.79 cm
Elías Belmonte C.
TENSIONES NORMALES Y CORTANTES EN SISTEMAS ISOSTÁTICOS
14
Unidad 2 - 1
PROPIEDADES MECANICAS DE LOS MATERIALES
Unidad 2
Propiedades Mecánicas de los Materiales
2.1 Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes
objetivos trazados para el Estudio de tensiones normales y cortantes en sistemas Isostáticos.
1. Definir las deformaciones unitarias.
2. Enunciar la “Ley de Hooke”
3. Relacionar las deformaciones con las fuerzas aplicada
4. Describir el procedimiento para efectuar la prueba estándar de tensión (σ) deformación unitaria (ε) y a partir de esta prueba definir las propiedades mecánicas
que se presentan en el diagrama.
5. Describir un método para determinar el punto de fluencia en materiales que no se
presenta bien definido.
6. Clasificar los materiales de acuerdo a su comportamiento mecánico
7. Describir la relación de Poissón
8. Conocer o estudiar las tensiones admisibles y sus valores que podemos adoptar de
trabajo de los distintos materiales.
9. Aprender a resolver problemas de tensión (σ) y deformación (δ), que obedezcan la
Ley de Hooke en elementos o sistemas Isostáticos sometidos a esfuerzos normales
simples.
2.2 Introducción
En la unidad anterior nos dedicamos fundamentalmente a estudiar los conceptos
básicos que relaciona la fuerza (carga) con los esfuerzos o tensiones. En esta unidad nos
ocuparemos de estudiar los cambios de forma de los materiales en otras palabras sus
deformaciones y sus relaciones que existen con las fuerzas y los esfuerzos (tensiones).
Examinaremos las propiedades mecánicas de los materiales interpretando su
comportamiento de acuerdo a las hipótesis planteadas. Además conoceremos que son las
tensiones admisibles.
Ing. G Elías Belmonte C.
Unidad 2 - 2
PROPIEDADES MECANICAS DE LOS MATERIALES
2.3 Deformaciones Unitarias
2.3.1 Deformaciones Unitarias Normales
Sea un elemento sometido a fuerzas normales como muestra la figura:
Δ LN = Deformación
L
L
ε
= Longitud del elemento
= Deformación Unitaria
ΔLN
N
Estado Inicial o
Estado no deformado
Estado Final o
Estado deformado
Aplicando la hipótesis de Bernoulli podemos definir:
ε=
Δ LN cm
L cm
Deformación
Unitaria
2.3.2 Deformaciones Unitarias Transversales o
Distorsión angular
Sea un elemento sometido su sección a fuerzas transversales como muestra el
esquema de la figura:
V
ΔLτ
γ
L
Estado inicial
No deformado
Estado final
deformado
Ing. G Elías Belmonte C.
Unidad 2 - 3
PROPIEDADES MECANICAS DE LOS MATERIALES
Aplicando Bernoulli podemos definir:
γ=
ΔLτ
L
Distorsión angular
2.4 Prueba estándar de tensión (σ) – deformación
unitaria (ε) del Acero Dulce
La resistencia de un material depende de muchas propiedades de los
materiales la mas importante es la capacidad para soportar cargas sin deformación
excesiva o falla. En menor grado depende de otras como ser la dureza, la tenacidad y la
ductilidad que influyen en la decisión de elección de un material. Todas estas
propiedades
se determinan mediante ensayos de materiales en laboratorio, en el
transcurso del tiempo se han standardizado, de modo de comparar los resultados
obtenidos, por ejemplo en Estados Unidos, la American Society for Testing and Materials
(ASTM) ha publicado pautas y lineamientos para llevar a cabo tales pruebas y
proporcionar limites de los cuales es aceptable el uso de material determinado.
Examinaremos uno de ellos el Ensayo de Tracción en el acero dulce,
dada su importancia y su inestimable ayuda que nos proporciona en la introducción de
conceptos básicos respecto a comportamiento mecánico de los materiales.
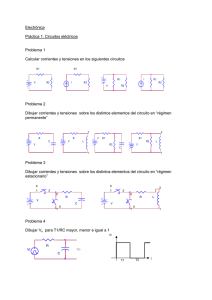
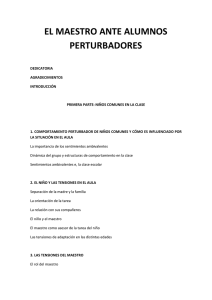
2.4.1 Diagrama de tensión – deformación unitaria
Este ensayo consiste en aplicar a una probeta de dimensiones estándares,
una carga que incrementa gradualmente, anotando las lecturas de los valores de cargas y
deformaciones correspondientes hasta que se produce la rotura. Esta prueba se la realiza
mediante una maquina conocida con el nombre de
“Maquina Universal”, como
muestra el esquema.
A
L
Probeta de
Acero dulce
Regla para
medir
deformación
Reloj de
carga
Gato
hidráulico
Máquina Universal
Ing. G Elías Belmonte C.
Unidad 2 - 4
PROPIEDADES MECANICAS DE LOS MATERIALES
Consideremos una probeta de acero con contenido bajo de carbono (acero
dulce), Con los valores obtenidos de fuerza y deformación mediante la maquina universal
construyamos una tabla para calcular los valores de tensión y deformación unitaria, los cuales
son graficados en un diagrama como mostramos a continuación.
TABLA DE CALCULO DE
σ- ε
P
ΔL
0
0
0
0
100
0.002
180
0.0004
200
0.004
360
0.0008
300
0.006
540
0.0012
0.008
720
0.0016
σ=
P
A
ε=
ΔL
L
0.0020
DIAGRAMA (σ
σ
- ε)
Tensión ultima E
σu
Escalón
de
fluencia
C D
B Limite de elasticidad
A Limite de proporcionalidad
σ rot
σf
σ Le
σ Lp
O
Zona
Elástica
PARA EL ACERO DULCE
Tensión de rotura
real
F’
F
Tensión de rotura
aparente
σLp= Tensión limite de
proporcionalidad
σLe = Tensión limite de
elasticidad
σf = Tensión de fluencia
σu = Tensión ultima
σrot = Tensión de rotura
ε
Zona Plástica
Ing. G Elías Belmonte C.
Unidad 2 - 5
PROPIEDADES MECANICAS DE LOS MATERIALES
2.4.2 Propiedades mecánicas
Del diagrama “Tensión – Deformación unitaria” del acero dulce
podemos definir varios conceptos y propiedades del comportamiento mecánico de los materiales.
•
Limite de proporcionalidad (punto A): Es el punto de la curva hasta donde
la deformación unitaria es proporcional al esfuerzo aplicado. Al esfuerzo que caracteriza este
punto se lo denomina Tensión Limite de Proporcionalita (σLP).
•
Limite de elasticidad (punto B): Es el punto de la curva hasta donde el
material es capaz de recuperar su deformación al quitarle la carga aplicada. Al esfuerzo que
caracteriza este punto se lo denomina Tensión Limite de Elasticidad (σLe).
•
Escalón de Fluencia (puntos C – D): Un ligero aumento de esfuerzo mas
allá del límite elástico provocara un colapso del material y esto ocasionara que se deforme
permanentemente sin aumento sensible de carga a este comportamiento se lo llama fluencia. Al
esfuerzo que caracteriza este escalón que muestra la curva se lo denomina Tensión de Fluencia
(σLP).
•
Resistencia ultima (punto E): Cuando la fluencia ha terminado, puede
aplicarse mas carga a la probeta debido a que en el interior del material a existido un reacomodo
de partículas de tal manera que el material sufre un endurecimiento por deformación, dando
como resultado una curva que se eleva continuamente hasta alcanzar el esfuerzo máximo. Al
esfuerzo que caracteriza este punto se lo denomina Tensión Ultima (σu).
•
Resistencia a la ruptura (punto F): Es el esfuerzo basado en la sección
original, que produce la ruptura o fractura del material. Al esfuerzo que caracteriza este punto se
lo denomina Tensión ruptura (σrot). O tensión de ruptura aparente.
En la realidad lo que sucede es que el área de la sección transversal sufre una
contracción en forma de cuello o garganta, cuya sección decrece hasta romperse. Si se calcula la
tensión de rotura considerando el decrecimiento de la sección trasversal nos encontraríamos que
el punto de ruptura de la curva es el punto F’, donde se presentaría la Tensión real de ruptura.
N
N
N
N
Rompe
Ing. G Elías Belmonte C.
Unidad 2 - 6
PROPIEDADES MECANICAS DE LOS MATERIALES
2.7.2
Ensayo de carga y descarga
a) Estado Elástico
Cuando la probeta de acero dulce se somete a cargas y descargas
sin alcanzar el punto B de la curva, podemos comprobar que el material es capaz de recuperar
toda su deformación en el proceso descarga, lo cual nos suponer que el material esta trabajando
en un Estado Elástico.
σ
Donde:
Zona
Elástica
εT = Deformación total
B
εe = Deformación elástica (deformación que el material es
carga
capaz de recuperar)
descarga
εT
ε
εe
Se considera que un material es elásticamente perfecto cuando se
cumple que la deformación unitaria total es igual a la deformación elástica, ósea que el material
es capaz de recuperar toda su deformación.
εT = εe
b) Estado Plástico
Cuando la probeta de acero dulce se somete a una carga más allá
del punto B de la curva, podemos comprobar que el proceso de descarga, no es capaz de
recuperar toda su deformación. Lo cual nos hace suponer que el material esta trabajando en
Estado Plástico.
σ
Zona
Elástica
Donde:
Zona
Plástica
εP = Deformación permanente o deformación plástica
(Deformación que el material no es capaz de recuperar)
B
εT = εp + εe
carga
descarga
εT
εP
εe
ε
Ing. G Elías Belmonte C.
Unidad 2 - 7
PROPIEDADES MECANICAS DE LOS MATERIALES
Se considera que un material es Plásticamente Perfecto cuando se
cumple que la deformación unitaria total es igual a la deformación Plástica, ósea que el material
no es capaz de recuperar deformación.
σ
Zona Plástica
εT = εp
εT
εP
2.7.3
ε
Cargas y descargas repetidas
Cuando la probeta de acero dulce se somete a cargas y descargas repetidas más allá del
punto B de la curva, podemos comprobar el material pierde elasticidad pero gana resistencia,
cuantas cargas y descargas se realicen.
σ
σf3
σf2 σ
f1
εe2
εe1
σ
ε
f1
e1
<σ
>ε
f2
e2
<σ
>ε
f3
e3
εe3
ε
< ....... < σ
fn
> ............ > ε en
Ing. G Elías Belmonte C.
Unidad 2 - 8
PROPIEDADES MECANICAS DE LOS MATERIALES
2.5 Clasificación de los materiales de acuerdo a su
características mecánicas
De acuerdo a sus a sus características mecánicas de los materiales
podemos clasificar los materiales en tres grandes grupos, materiales frágiles, dúctiles y plástico.
σ
frágiles
Dúctile
Plástico
ε
a) Materiales frágiles: Sus características principales son las siguientes:
•
A grandes tensiones pequeñas deformaciones.
•
No acusa escalón de fluencia.
•
Rotura brusca y sin contracción de la sección transversal.
•
Ejemplo: vidrio, porcelana, rocas, etc.
b) Materiales Plásticos: Sus características principales son las siguientes:
•
A pequeñas tensiones, grandes deformaciones
•
No acusa escalón de fluencia
•
Rotura suave y con contracción de la sección transversal.
•
Ejemplo: plásticos, asfalto, arcilla húmeda, etc.
c) Materiales Dúctiles: Sus características principales son las siguientes:
•
En su primer estado de deformación, la tensión es directamente
proporcional a la deformación.
•
Acusa escalón de fluencia
•
Rotura suave y con contracción de la sección transversal.
•
Ejemplos: acero dulce, latón, zinc, etc.
Ing. G Elías Belmonte C.
Unidad 2 - 9
PROPIEDADES MECANICAS DE LOS MATERIALES
2.6 Límite convencional de fluencia.
Para materiales de curvas continuas en el diagrama Tensión –
Deformación Unitaria, donde no es apreciable el escalón de fluencia, se han realizado en
laboratorio muchos ensayos para determinar este valor representativo, como en la Sociedad
Americana de Ensayo de Materiales (ASTM), donde se han adoptado valores de deformación
unitaria, denominándolo límite convencional de fluencia, debe hacerse notar que la fluencia
definida de tal manera no representa ninguna propiedad física, ni mecánica del material, tan solo
sirve para encontrar un punto característico de la curva que nos permita comparar con otros
materiales.
Para encontrar la tensión de fluencia se procede de la siguiente manera: se
traza una tangente a la curva en el punto de origen y traslada dicha tangente paralelamente hasta
el valor determinado por el límite convencional de fluencia, donde corta esta paralela a la curva
consideraremos el punto de fluencia del material, que para este curso consideraremos que en ese
punto coinciden los limites de proporcionalidad, elasticidad y el punto de Fluencia , reflejando
dicho punto en el eje de las tensiones podemos encontrar la tensión de fluencia para materiales
de curva continua.
Tangente al
punto de origen
de curvatura
σ
Donde:
A =B =C =D
Punto de fluencia
σpf
σpf = tensión convencional de fluencia
Paralela tangente
0
εpf
εpf = Límite convencional de fluencia
ε
El límite convencional de fluencia especificado para los aceros y aluminio
es de 0.002 y para otros materiales se especifica valores que fluctúan entre 0.0005 (frágiles) y
0.0035 (plásticos) dependiendo de su curva característica.
Ing. G Elías Belmonte C.
Unidad 2 - 10
PROPIEDADES MECANICAS DE LOS MATERIALES
2.7 Ley de Hooke
Como se observo en la sección anterior en estado elástico existe una relación
lineal entre la tensión y la deformación unitaria (Hipótesis de dependencia lineal). Este
hecho fue descubierto por Robert Hooke en 1676 y se conoce como la Ley Hooke que
dice que la tensión es proporcional a la deformación unitaria, para que sea igual debe
existir una constante de proporcionalidad, mas conocida como modulo de elasticidad o
modulo de Young (E) en honor a Thomas Young que la introdujo en 1807, este modulo
representa la medida de rigidez del material.
Para el esfuerzo normal σ ∝ ε
⇒ σ = E*ε
Para el esfuerzo cortante τ ∝ γ ⇒ τ = Gγ
donde :
E : Módulo de elasticidad longitudinal
G: Módulo de elasticidad transversal
σ
tanα =
σ
ε
⇒ σ = tanα * ε ⇒ E = tanα
σ
α
ε
ε
2.8 Ley complementaria de Hooke
Otra forma de ver expresada esta ecuación es de tal forma de relacionar la
deformación (ΔL) en función de la fuerza aplicada (N).
Sabemos de las anteriores secciones que para esfuerzos normales, tenemos:
σ=
N
…………….1
A⊥
ε=
ΔLN
……………2
L
σ = Eε ……………...3
Ing. G Elías Belmonte C.
Unidad 2 - 11
PROPIEDADES MECANICAS DE LOS MATERIALES
Reemplazando 1 y 2 en 3 tenemos:
ΔL
N
=E N
A⊥
L
⇒
ΔLN =
N *L
E * A⊥
Ley complementaria de Hooke
para esfuerzos normales
De Igual manera se puede deducir para el esfuerzo cortante quedando la expresión
de la siguiente manera:
ΔLτ =
Ley complementaria de Hooke
para esfuerzos cortantes
P*L
G * A//
Es bueno conceptuar entre la diferencia que existe entre deformación (ΔL ) y
desplazamiento (δ ) . La deformación es producto de un esfuerzo en el elemento que produce
cambio de forma en el, en cambio el desplazamiento es producto del desplazamiento o
deformacion de otro elemento
que no necesariamente implica cambio de forma, sino
movimiento del elemento respecto a su posicion original. Ver ejemplo a continuación:
a
b
n
a
n
ΔLN
N
o
b
o
δ
El elemento n se deforma (ΔL )
o se desplaza (δ )
Ing. G Elías Belmonte C.
Unidad 2 - 12
PROPIEDADES MECANICAS DE LOS MATERIALES
2.9 Problemas
Ejemplo 1:
Sea es sistema estructural mostrado en la figura, sometida a esfuerzos normales,
determinar los diagramas de fuerzas Normales, Tensiones Normales y Desplazamientos.
Datos:
E = 2 X 10 6
Kg
cm
2
A1 = 2cm 2
A2 = 4cm
P1 =3000Kg
A
30 cm.
2
P2 = 2000Kg
B
Incógnitas
40 cm.
Diagramas
“N” , “σ” , “δ”
P3 = 9000Kg
C
20 cm.
D
Solución
A
-
30 cm.
B
P2 = 2000Kg
0.0375 cm.
-
-
5000Kg
0.015 cm.
40 cm.
C
20 cm.
D
1500Kg/cm2
3000Kg
P1 =3000Kg
-
2
1250Kg/cm
P3 = 9000Kg
+
+
+ 1000Kg/cm2
0.010 cm.
4000Kg
“N”
“σ”
“δ”
a) Fuerzas normales
Se diagrama directamente a partir del conocimiento de las cargas aplicadas.
Ing. G Elías Belmonte C.
Unidad 2 - 13
PROPIEDADES MECANICAS DE LOS MATERIALES
b) Tensiones Normales
Tramo A - B
σ A− B =
N A− B 3000
=
= 1500
2
A1
σ B −C =
N B −C 5000
=
= 1250
4
A2
σ C −D =
N C − D 4000
=
= 1000
A2
4
Kg
cm2
(− )
Tramo B - C
Kg
cm 2
(− )
Tramo C - D
ΔL =
c) Deformaciones
Kg
cm2
(+ )
N *L
E*A
Tramo A - B
ΔL A− B =
N A− B * L A− B
3000 * 30
=
= 0.0225 cm
E * A1
2 X 10 6 * 2
ΔL B − C =
N B −C * L B −C
5000 * 40
=
= 0.025 cm
E * A2
2 X 10 6 * 4
(acorta )
ΔLC − D =
N C − D * LC − D
4000 * 20
=
= 0.010 cm
E * A2
2 X 10 6 * 4
(alarga )
(acorta )
Tramo B - C
Tramo C - D
d) Desplazamientos
Partimos donde la deformación es cero, o sea en el empotramiento.
Sección D – D
δ D −D = 0
Sección C – C
δ C −C = δ D − D + ΔlC − D = 0 + 0.010 = 0.010 cm
(+ )
δ B − B = δ C −C + Δl B −C = 0.010 − 0.025 = −0.015 cm
(− )
Sección B –B
Ing. G Elías Belmonte C.
Unidad 2 - 14
PROPIEDADES MECANICAS DE LOS MATERIALES
Sección A –A
δ A− A = δ B − B + Δl A− B = −0.015 − 0.0225 = −0.0375 cm (− )
Ejemplo 2:
Sean dos barras de acero (elásticas) que soportan una carga como indica la figura,
determinar el desplazamiento vertical y horizontal del punto B.
Datos:
A
E = 2 X 10 6
A AB
=
Kg
A
cm 2
4cm 2
5m
ABC = 6cm 2
3m
3m
B
Incógnitas
δ
δ
Estado inicial
No deformado
B
C
C
δ VBδ
B
V
Estado final
deformado
B´
P = 6000 Kg.
B
=?
H
B
=?
V
4m
BH
δδH
B
Solución:
a) Fuerzas en las barras
∑ FV = 0
NBA
α
N BA senα − 6000 = 0
N BA =
NBC
P = 6000 Kg.
6000 6000
=
3
senα
5
N BA = 10000 Kg
( Tracción )
∑ FH = 0
N BA cos α − N Bc = 0
N Bc = N BA * cos α
N Bc = N BA * cos α
N Bc = 8000 Kg
⇒
N Bc = 8000 Kg
( Compresión)
Ing. G Elías Belmonte C.
Unidad 2 - 15
PROPIEDADES MECANICAS DE LOS MATERIALES
b) Deformaciones en las barras
ΔL =
N *L
E*A
b1) barra BA
A
5m
ΔLBA =
ΔLBA =
B
N BA * LBA
E * ABA
10000 * 500
2 X 106 * 4
ΔLBA
ΔLBA = 0.625 cm
NBA
(Alargamiento)
b1) barra BC
ΔLBC =
NBC ΔLBC
B
C
ΔLBC =
4m
N BC * LBC
E * ABC
8000 * 400
2 X 10 6 * 6
ΔLBC = 0.267 cm (Acortamiento)
d) Desplazamiento del punto B
Para comprender el efecto que producen las deformaciones
A
de las barras sobre el desplazamiento del punto B, es
necesario que en el proceso de su movimiento, las barras
5m
3m
cumplan con dos condiciones:
o Mantener las dimensiones de las barras
deformadas.
ΔLBA
B
B’’
ΔLBC
B’
Fig. 1
C
o Mantener unidas las barras en el punto B
Para lograr esto, imaginemos por un momento
desconectadas entre si las barras BA y BC, de tal manera
que estas se puedan deformar libremente hasta los puntos B’
y B’’, como muestra la figura 1.
Ing. G Elías Belmonte C.
Unidad 2 - 16
PROPIEDADES MECANICAS DE LOS MATERIALES
A
La única solución que existe para mantener las barras
deformadas y unidas en el punto B, es rotarlas las barras
5m
3m
sobre sus apoyos fijos A y B. Donde se intercepten estas
rotaciones será el punto real de desplazamiento del punto
B (punto B*). Ver Fig. 2
ΔLBA
B
C
B’’
ΔLBC
δ VB
B’
B*
Desplazamiento
real del punto B
B
δH
Fig. 2
A
En la práctica los arcos engendrados por las rotaciones
pueden ser remplazados por rectas perpendiculares, sin error
5m
3m
apreciable, debido que tanto las rotaciones como las
deformaciones son pequeñas. Donde se interceptan estas
B
rectas será el punto de desplazamiento de calculo (punto
C
B’
ΔLBA ΔL
BC
B**)
δ VB
B’’
Desplazamiento de
B** cálculo del punto B
B
δH
b1) Alternativa de solución 1: Realizando una comparación de triángulos se obtiene las
ecuaciones de solución:
θ B’’
B
ΔLBA
B’
δ H = ΔLBC = 0.267 cm
B
ΔLBC
θ a
bθ
δ VB
B
Donde: a =
θ
B
δH
δV = a +b
B**
ΔLBC
ΔLBA
y b=
si
tan θ
senθ
tan θ =
Reemplazando en la ecuación tenemos:
Ing. G Elías Belmonte C.
ΔLBC
b
Unidad 2 - 17
PROPIEDADES MECANICAS DE LOS MATERIALES
ΔL
ΔL
δ V = senBAθ + tanBCθ
B
0
δV =
B
0.625 0.267
+
3
3
4
5
δ V = 1.398 cm
B
⇒
Alternativa de solución 2: Este método consiste en poner la deformación, en función de
los desplazamientos:
ΔLi = f (δ H , δ V )
Barra BC
B
ΔLBC
ΔLBC = δ H = 0.267 cm
B
C
c
B**
B
δH
Barra BA
δ VC
B
B
θ
B
de la δ V y δ V
θ ΔLBC
ΔLBA
B’
Recta Auxiliar // a la barra
que pasa por la intersección
ΔLBA = a − b
B’
b
C
senθ =
a
cos θ
δ VB
a
δ
b
δ
→ a = δ V senθ
B
B
V
→ b = δ H cos θ
B
B
H
ΔLBA = δ V senθ − δ H cos θ
B
θ
ΔLBc =
B**
B
0
d Sistema de ecuaciones
−δ H
B
Reemplazando c en d
B = ΔL
δH
BC
ΔLBA = δ V senθ − ΔLBC cosθ
B
Despejando δ V
B
ΔL
ΔL
δ V = senBAθ + tanBCθ ,
B
entonces
δ V = 1.398 cm
B
Ing. G Elías Belmonte C.
Unidad 2 - 18
PROPIEDADES MECANICAS DE LOS MATERIALES
Ejemplo 3:
Sea el sistema estructural mostrado en la figura, determinar el desplazamiento vertical del
punto A y las tensiones en las barras elásticas.
Datos:
q = 2000 Kg/m.
p
P1= 6000 Kg.
E = 2X106 Kg/cm2
P1
2
A2 = 6 cm
δ
q
n
1.20 m
C
Chapa rígida
A
B
=?
1.00 m
σ1 = ?
σ2 = ?
σ3 = ?
0.80 m
P2
A1 = A3 = 4 cm2
V
A
p
o
P2= 8000 Kg.
Incógnitas
30º 30º
2.00 m
Solución:
a) Ecuación de comparación de deformaciones.
δ VA
δ AV δ CV
=
⇒ δ CV = 2δ AV
1
2
δ VC
1.00 m
2.00 m
b) Cálculo de esfuerzos en las barras
P1
q = 2000Kg/m
NC
∑MB = 0
N C * 2 + 2000 * 2 *1 = 6000 *1
B
1.00 m
2.00 m
N C = 1000 Kg
Ing. G Elías Belmonte C.
Unidad 2 - 19
PROPIEDADES MECANICAS DE LOS MATERIALES
Analizando cada barra por separado:
Barra 1
N1
∑ FV = 0
N C − N1 = 0
N1 = Nc
NC
N1 = 1000 Kg
(Compresión)
Barra 2
N2
∑ FV = 0
NC + N 2 − P2 = 0
N 2 = 8000 − 1000
P2
NC
N1 = 7000 Kg
(Tracción)
Barra 3
N3
30º 30º
∑ FV = 0
N3
2 N 3 cos 30º − N 2 = 0
N2= 7000 Kg.
N3 =
7000
2 * cos 30º
N3 = 4041.45 Kg (Compresión)
Se han calculado sus fuerzas internas, para determinar sus deformaciones y finalmente
sus desplazamientos
ΔL =
b) Deformaciones:
N *L
E*A
Barra 1
ΔL1 =
N1 * L1 1000 * 120
=
= 0.015 cm
E * A1 2 X 106 * 4
(acorta )
Ing. G Elías Belmonte C.
Unidad 2 - 20
PROPIEDADES MECANICAS DE LOS MATERIALES
Barra 2
ΔL 2 =
N 2 * L 2 7000 * 80
=
= 0.047 cm
E * A2
2X10 6 * 6
(alarga )
Barra 3
ΔL 3 =
c)
N3 * L3
=
E * A3
80
cos 30º = 0.047 cm
6
2X10 * 4
4041.45 *
(acorta )
Desplazamiento del punto C
ΔL3
30º 30º
p
30º 30º
p
δ
ΔL3
V
3
p
o
∃
o
∃
n
ΔL2
#
n
δ =δ
C
3
V
V
ΔL1
#
…………………
c
+ ΔL 2 − ΔL 3
En el gráfico podemos observar el siguiente triángulo:
cos 30º =
ΔL3
30º
δ3
V
ΔL3
δ3
V
ΔL
δ 3 = cos 303 º
V
Reemplazando en la ecuación c tenemos:
ΔL
δ V = cos 303 º + ΔL2 − ΔL3
C
0.047
δ V = cos 30º + 0.047 − 0.015
C
δ
C
V
= 0.086 cm
⇒
δ
δ V = 0.043 cm
C
A
=
V
2
Ing. G Elías Belmonte C.
Unidad 2 - 21
PROPIEDADES MECANICAS DE LOS MATERIALES
d) Tensiones:
σ1 =
N1 1000
Kp
=
= 250 2
cm
A1
4
compresión
σ2 =
N 2 7000
Kp
=
= 1166 2
cm
A2
6
tracción
σ3 =
N 3 4041.45
Kp
=
= 1010 2
cm
A3
4
compresión
Ejemplo 4:
Sea la barra de sección constante, determinar su deformación debido a su peso propio.
Datos:
γ = Peso específico
q =γ *A
L
A = Área
dz
L = Longitud
z
Incógnitas
ΔLG =?
N
Solución:
Extrayendo el diferencial:
ΔL =
dz
N *L
E*A
dΔL
N=q*z =γ *A*z
ΔLG
L
0
0
∫ dΔLG = ∫
ΔLG =
L
⎡ z2 ⎤
ΔLG = * ⎢ ⎥
E ⎣⎢ 2 ⎦⎥
0
γ
γ * A * zdz
E*A
γ * L2
2E
G
Si el peso es : G = γ * L * A
ΔLG =
G*L
2E * A
ΔLG =
γ *L*L A
2E
*
A
Deformación debido al
peso propio de sección
Ing. G Elías Belmonte C.
Unidad 2 - 22
PROPIEDADES MECANICAS DE LOS MATERIALES
2.10 Relación de Poisson
Otro tipo de deformación elástica que se produce en un sólido deformable es la
variación de las dimensiones transversales producto del sometimiento del mismo a una fuerza de
tracción o compresión axial. En efecto se comprueba experimentalmente que si una barra se
alarga por una tracción axial, sufre una reducción de sus dimensiones transversales. Poisson,
físico matemático Francés comprobó en el año 1811 que debajo del límite de proporcionalidad la
relación entre la deformación unitaria longitudinal con respecto a la deformación transversal es
constante y la definió de la siguiente manera:
μ=−
Lx
ΔLx
ΔLy
N
Ly
εy
εx
Relación de
Poisson
εy = Deformación unitaria longitudinal
εx = Deformación unitaria transversal
μ = Relación de Poisson
2.11 Ley generalizada de Hooke
La relación de Poisson permite generalizar la ley de Hooke para un estado
tridimensional de tensiones (ejes X,Y, Z), imaginémonos un elemento tridimensional sometido a
fuerzas en sus tres direcciones, y analicemos que sucede por ejemplo con la deformación sobre el
eje X, el elemento debido a su fuerza axial sobre el eje X , este se alargara sobre el eje X, pero
debido a las fuerzas aplicadas en los otros dos ejes restantes (ejes Y, Z) según Poisson acortara la
deformación sobre el eje X, quedando la deformación unitaria sobre el eje X expresada de la
siguiente manera:
[
]
[
]
[
]
1
⎫
σ x − μ(σ y + σ z )
⎪
E
⎪
Generalizando para los otros ejes tenemos:⎪
⎪
DA HOOKE
⎬ LEY DE GENERALIZA
1
ε y = σ y − μ(σ x + σ z )
⎪
E
⎪
1
⎪
ε z = σ z − μ(σ x + σ y )
⎪⎭
E
⊕ Traccion− Alarg amiento
− Compresion− Acortamiento
εx =
Ing. G Elías Belmonte C.
Unidad 2 - 23
PROPIEDADES MECANICAS DE LOS MATERIALES
Ejemplo 5:
Sea un cubo de goma deformable que se introduce libremente sin holgura en un molde de
acero indeformable cubo de goma en su cara superior esta sometido a una presión
uniformemente repartida (qi), como muestra la figura. Determinar las tensiones normales y
deformaciones unitarias en sus tres direcciones (X, Y, Z).
qi
Y
Molde de acero
indeformable
X
Cubo de goma
deformable
Z
Solución:
Antes de aplicar las ecuaciones de la ley generalizada de Hooke, analicemos como se
producen las tensiones y deformaciones en el cubo de goma de forma general.
•
Dirección X
εx = 0
Debido a que en esa dirección el molde de acero le impide deformarse
al cubo de goma.
σx = 0
Ósea existe tensión debido que al impedir el molde de acero que se
deforme el cubo de goma esto hace que se produzca tensión.
•
Dirección Y
εy = 0
Debido a que en esa dirección el molde de acero no impide deformarse
al cubo de goma.
σy = -qi Debido al equilibrio que debe existir en esa dirección.
•
Dirección Z
εz = 0
Debido a que en esa dirección el molde de acero no impide deformarse
al cubo de goma.
σz = 0 Debido a que la goma puede en esta dirección libremente sin que nadie
interrumpa este proceso, es que no se produce tensión en esta dirección.
Ing. G Elías Belmonte C.
Unidad 2 - 24
PROPIEDADES MECANICAS DE LOS MATERIALES
Del análisis realizado podemos concluir lo siguiente:
εx = 0
σx = 0
σy = -qi
σz = 0
Conocidas
εy = 0
Incógnitas
εz = 0
Aplicando este análisis a la ley generalizada de Hooke se encuentran las incógnitas:
1era Ecuación
εx =
[
]
1
σ x − μ (σ y + σ z )
E
Remplazando las expresiones conocidas se tiene:
0=
1
[σ x − μ (- q i + 0)]
E
σx = −μ q
i
2era Ecuación
εy =
[
]
1
σ y − μ (σ z + σ z )
E
Remplazando las expresiones conocidas se tiene:
1
ε y = [- q i − μ (- μq i + 0 )]
E
q
ε y = i ( μ 2 − 1)
E
3era Ecuación
εz =
[
]
1
σ z − μ (σ x + σ y )
E
Remplazando las expresiones conocidas se tiene:
εz =
1
[0 − μ(- μq i + q i )]
E
εz =
μq
E
i ( μ - 1)
Ing. G Elías Belmonte C.
Unidad 2 - 25
PROPIEDADES MECANICAS DE LOS MATERIALES
2.12 Tensiones Admisibles y peligrosas
La tensión real de trabajo que soporta el material bajo la acción de unas cargas, no
debe sobrepasar a la tensión admisible, que es la máxima a la que puede ser sometido el
material con cierto grado de seguridad en la estructura o elemento que se considere, por
consiguiente la Tensión admisible queda definida de la siguiente manera:
σ Adm =
Donde:
σo
n
σAdm = Tensión Admisible
σ o = Tensión peligrosa
n
= Coeficiente de seguridad
2.11.1 Tensión peligrosa
En un proyecto real la tensión admisible debe ser siempre menor al límite de
proporcionalidad, con el objeto de que se pueda aplicarse en todo momento la relación
lineal entre tensiones y deformaciones que establece la ley de Hooke, y es la base de toda
la teoría propuesta. Sin embargo, es muy difícil determinar el límite de proporcionalidad,
y se toma como tensión peligrosa a la tensión fluencia, sabiendo que el coeficiente de
seguridad nos garantiza que el material este trabajando por debajo del límite de
proporcionalidad. Quedado de finida de la siguiente manera:
a) Para materiales con escalón de fluencia
σo = σf
σ f = tensión de fluencia
b) Para materiales sin escalón de fluencia
σ o = σ pf
σ pf = tensión convencional de fluencia
2.11.2 Coeficiente de seguridad “n”
Son muchos los factores que influyen para adoptar el coeficiente de seguridad, a
continuación enunciaremos algunos:
a) Conocimiento del comportamiento físico y mecánico del material (continuidad,
homogeneidad, isotropía, etc.)
Ing. G Elías Belmonte C.
Unidad 2 - 26
PROPIEDADES MECANICAS DE LOS MATERIALES
b) Uso que se le va ha dar a la estructura
c) La fiscalización y supervisión.
d) Método de cálculo utilizado para el diseño
e) Errores numéricos y aproximaciones realizadas.
f) Perfecta evaluación de las cargas
Como referencia:
Para materiales con escalón de fluencia:
n = 1.10 – 1.70
Para materiales sin escalón de fluencia:
n = 1.80 – 4.00
Ing. G Elías Belmonte C.
Unidad 2 - 27
PROPIEDADES MECANICAS DE LOS MATERIALES
εz
εy
εx
Ing. G Elías Belmonte C.
PROPIEDADES MECANICAS DE LOS MATERIALES
εx =
εy =
εz =
σx
E
σy
E
σz
E
−
−
−
μ
E
μ
E
μ
E
Unidad 2 - 28
(σ y + σ z )
(σ x + σ z )
(σ x + σ y )
Ing. G Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 1
Unidad 3
Tensiones y deformaciones Normales en
Sistemas Hiperestáticos
3.1 Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes
objetivos trazados para el Estudio de tensiones normales y cortantes en sistemas Hiperestáticos.
1. Conocer cuales son los sistemas estructurales Hiperestáticos y su grado de
hiperestaticidad de las mismas.
2. Explicar porque un sistema se convierte en hiperestàtico.
3. Listar los pasos para dar solución a un sistema hiperestàtico.
4. Analizar sistemas hiperestáticos sometidos a cargas externas, errores de montaje o
variaciones de temperatura; determinando sus fuerza, tensiones, deformaciones y
desplazamientos de cada uno de los elementos o barras elásticas que componen el
sistema.
5. Conociendo sus materiales, propiedades, tensiones y deformaciones normales de los
distintos elementos que componen el sistema hiperestático, tenemos que saber
dimensionar las secciones necesarias de los mismos.
6. Analizar las tensiones y deformaciones en cilindros de pared delgada, sometidos a
presión.
3.2 Introducción
Un sistema hiperestàtico o estáticamente indeterminado, es aquel en cual no es posible
determinar las fuerzas internas de sus elementos debido a que el numero de incógnitas excede al
numero de ecuaciones que nos brinda la estática. Físicamente un sistema se convierte en
hiperestàtico cuando el numero de sus elementos (incluyendo soportes) es mayor que el numero
necesario para guardar su equilibrio estático; hay que aclarar que estos elementos adicionales
llamados vínculos superfluos no garantizan el equilibrio de una estructura, si no vienen dados por
exigencias de rigidez y resistencia .
El grado de hiperestaticidad de un sistema estructural lo determina el número de vínculos
superfluos o elementos en exceso que tenga.
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 2
Ejemplo:
P
P
P
P
1er grado de
hiperestaticidad
er
1 grado de
hiperestaticidad
2er grado de
hiperestaticidad
3.3 Metodología de solución
En general, para dar solución a un sistema hiperestàtico se debe seguir los siguientes pasos
que por su importancia los describimos como partes:
a) Parte geométrica
Se propone como se deforma el conjunto los elementos (barras) incognitas que
componen el sistema estructural partiendo de la suposicion de la condición que las deformaciones
de las barras incognitas guardan una relacion geometrica lineal, esta relacion expresada
matematicamente se denomina Ecuaciones de Compatibilidad de Deformación. El numero de
estas ecuaciones que se deben plantear esta en función del grado de hiperestaticidad del sistema, si
es de primer grado se planteara una, si es de segundo grado se plantearan dos y así sucesivamente.
Ecuaciones : f (ΔLi)
En la practica para construir estas ecuaciones se sigue los siguienter pasos:
Se dibuja un diagrama de cuerpo libre mostrando todos sus elementos incognitos en
un estado no deformado (Estado inicial)
Se propone un diagrama de curpo libre deformado (Estado final) asumiendo que
las deformacciones de las barras incognitas (alargamiento o acortamiento), esta regidos por medio
de un comportamiento geometrico lineal de deformacion de las barras incógnitas,y haciendo
cumplir las restricciones de movimientos de los apoyos ,articulaciones y barras rigidas planteamos
la Propuesta Final de deformacion de la estructura..
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 3
Del análisis de la Propuesta de deformacion de la Estructura, por medio de
comparaciones geometricas entre las deformaciones incógnitas se propone relaciones lineales
entre ellas, denominadas Ecuaciones de Compatibilidad de Deformación.
b) Parte estática
Partiendo del conocimiento de la Propuesta Final de deformacion (alargamientos,
acortamientos de las barras incognitas) ,adoptamos el sentido de las fuerzas internas de las barras
incognitas y mediante las ecuciones que nos brinda la estática construimos relaciones de equilibrio
que nos vinculan las fuerzas internas. Llamadas Ecuaciones de Equilibrio Estático.
Ecuaciones : f (Ni)
c)
Parte física
( Ley de Hooke)
Se relaciona para cada elemento isostático incognito que compone el sistema
estructural hiperestático, las deformaciones propuestas ( Parte Geometrica), con las fuerzas que las
ocacionan (Parte Estatica), mediante la Ley de Hooke mas conocidas como Ecuaciones Físicas.
Ecuacion para cada
elemento incognito
Li
N i * Li
Ei * Ai
d) Parte final
Una vez planteadas los tres grupos de ecuaciones (Ecuaciones. de Compatibilidad,
Equilibrio y Fisica ) , seprocede a conformar un sistema de ecuaciones y resolverlas por cualquier
metodo, obteniendo las ingontitas deseadas.
3.4 Problemas
3.4.1 Generales
Ejemplo 1
Sean tres barras de un sistema colgante hiperestático como muestra la figura, las barras
laterales son idénticas y de cobre, la barra central es de acero, ¿que tensión se produce en las barras
bajo la acción de una fuerza P?.
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Datos
Unidad 3 - 4
Barras elásticas
E cu
L
E ac
A cu
A ac
Acero
Cobre
Cobre
P
L
L
D
P
Chapa Rígida
Incógnitas
cu = ?
ac = ?
Solución:
a) Parte Geométrica:
Acero
Cobre
Cobre
E.I.
Lcu
Lcu
Lac
E.F.
Estado Inicial no
deformado
Estado Final
deformado
Propuesta de deformacion
Lcu = alarga, entonces Ncu (tracción)
Lac = alarga, entonces Nac (tracción)
ΔLcu = ΔLac
①
Ecuación de compatibilidad
de deformaciones
b) Parte estática:
Ncu
Ncu
Nac
P
F
V
0
2 N cu N ac P
②
Ecuación equilibrio estático
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 5
c) Parte física
c1) Barra Cu:
c2) Barra Ac
Cobre
L cu
N cu * L cu
E cu * A cu
L
N ac * 2L ac ③b
E ac * A ac
Ecuación física
2L
L ac
③a
Ecuación física
Acero
Lcu
Lac
Ncu
c) Parte final
Nac
Reemplazando las ecuaciones físicas ③a y ③b en ①
N ac * 2L ac N cu * L cu
E ac * A ac
E cu * A cu
N ac
E ac * A ac
* N cu
2 * E cu * A cu
N ac c1 * N cu
Donde: c1
E ac * A ac
2 * E cu * A cu
④
④ en ②
2 N cu c1 * N cu P
⑤ N cu
P
2 c1
cu
N cu
A cu
ac
N ac
A ac
⑤ en ④
N ac c1 *
P
2 c1
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 6
Ejemplo 2
Determinar las tensiones normales en las barras elásticas de acero mostradas en la
figura además calcular el desplazamiento vertical del punto A
Datos
Ecu = 1.2X106 Kg/cm2
30º 30º
0.60 m
Eac = 2.1X106 Kg/cm2
A1 = 6 cm2
Acero
A2 = 6 cm2
P1 = 20000 kg
A3 = 6 cm2
0.30 m
C
B
D
A4 = 4 cm2
A
P1 = 20000 kg
P2 = 14000 kg
Chapa rígida
Cobre
0.60 m
P2 = 14000 kg
Incógnitas
0.45 m
1 = ?
2 = ?
1.00 m
3 = ?
1.00 m
2.00 m
4 = ?
V = ?
A
Solución
a) Parte Geométrica:
Acero
E.F.
L cu L ac
1
3
Lac
A
B
Lcu
3L cu L ac
Chapa rígida
E.I.
D
C
①
Ecuación de compatibilidad
de deformaciones
Cobre
1.00 m
1.00 m
2.00 m
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 7
Propuesta de deformacion
Lcu = alarga, entonces Ncu = tracción
Lac = acorta, entonces Nac = compresión
v
A
También:
1
Lcu
1
v Lcu
A
b) Parte estática
Nac
P1 = 20000 kg
MB 0
C
B
2000 *1 N cu *1 N ac * 3 0
D
A
Chapa rígida
Ncu
1.00 m
1.00 m
N cu 3N ac 2000 ②
2.00 m
Ecuación equilibrio estático
c) Parte física
Barra Cu:
Ncu
Ncu
Lcu L1 L2
L1
Lcu
L1
N cu * 60
N1 * L1
Ecu * A1 1.2 X 10 6 * 6
L2
N 2 * L2 N cu 14000* 45
Ecu * A2
1.2 X 10 6 * 6
0.60 m
L2
P2 = 14000 kg
0.45 m
por tanto :
L cu
N 14000 * 45
N cu * 60
cu
6
1.2X10 * 6
1.2X10 6 * 6
③a
Ecuación física
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 8
Barra Ac:
L4
30º 30º
´
30º 30º
L4
30º 30º
´
L3
ΔLac
L ac 4 L 3
V
Nac
Nac
En el gráfico podemos observar el siguiente triángulo:
´
4
cos 30º
V
L 4
V
V
4
4
30º
L4
entonces:
L ac
L 4
cos 30º
L 4
L 3
cos 30º
pero:
N *L
N * 90
Nac * 90
ΔL3 3 3 ac
Eac * A 2
Eac * 6 2.1X106 * 6
L 4
N4 * L4
E ac * A 4
60
N 4 * 60
cos 30º
E ac * 4
2.1X10 6 * 4 * cos 30º
N4 *
Cálculo de N4
F
V
0
2 N 4 cos 30º N ac 0
N4
30º 30º
N4
N4
Na
c
L 4
N ac
2 * cos 30º
N ac * 60
2.1X10 6 * 8 * cos 2 30º
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 9
Reemplazando luego en la ecuación de deformación de la barra de acero:
Lac
N ac * 60
6
3
N ac * 90
2.1X 10 * 8 * cos 30º
③b
6
2.1X 10 * 6
Ecuación física
c) Parte final
Reemplazando las ecuaciones físicas ③a y ③b en ①
N 14000 * 45
N ac * 60
N ac * 90
N cu * 60
3*
cu
6
6
6
3
1.2X10 * 6 2.1X10 * 8 * cos 30º 2.1X10 6 * 6
1.2X10 * 6
N 14000 * 45
N cu * 60
3*
cu
6
1.2X10 * 6
1.2X10 6 * 6
N ac
60
90
6
3
2.1X10 * 8 * cos 30º 2.1X10 6 * 6
N ac 1.98N cu 1.48N cu 14000 ④
④ en ②
N cu 31.98N cu 1.48N cu 14000 2000
N cu 5637.96 k
⑤
Tracción
⑤ en ④
N ac 1212.66 k
Tracción
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 10
Calculo de Tensiones y Deformaciones de las barras elasticas
Barra ac
Ncu
Lcu
N1 = Ncu = 5637.93 k
(Tracción)
N2 = Ncu – P2 = - 8362.07 k
(Compresión)
(Tracción)
0.60 m
(Compresión)
P2 = 14000 kg
0.45 m
(Acortamiento)
Barra ac
0.60 m.
N3 = Nac = 1212.66 k
30º 30º
´
0.30 m.
ΔLac
Ncu
(Tracción)
N4
N ac
700.13k
2 * cos 30º
3
N 31 1212.66
k
202.11 2
A3
6
cm
4
N 4 700.13
k
175.03 2 (Compresión)
A4
4
cm
Lac
N ac * 60
2.1X 106 * 8 * cos 3 30º
L ac 15.33x10 3 cm
Calculo de desplazamientos
Punto A
A
N ac * 90
2.1X 106 * 6
(Alarga)
De acuerdo a los resultados el
desplazamiento real es el que muestra
el esquema, siendo:
C
Lcu
(Tracción)
Acero
Chapa rígida
B
(Compresión)
D
E.I.
Lac
A
v
Lcu 5.28x103 cm.
Cobre
E.F.
1.00 m
1.00 m
2.00 m
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 11
Ejemplo 4:
Sea el sistema estructural colgante que consta de tres barras elásticas unidas en B, determinar el
desplazamiento horizontal y vertical del punto B y las tensiones en cada barra.
Datos
A1 A 2 A 3 A 6 cm 2
E 2X10 6 Kg / cm 2
Incógnitas:
1
2
3
45º
B
20º
B
P = 8000 Kg
V
B
H
2.00 m
Solución:
Estado inicial
No deformado
Propuesta de
deformacion
B
B´
Estado final
deformado
a) Parte Geométrica
①
② 45º
20º
Propuesta de deformacion
B L2
L3
E.I.
L1
③
B´
BH
BV
L1 = alarga, entonces N1 (tracción)
L 2 = alarga, entonces N2 (tracción)
L 3 = acorta, entonces N3 (compresión)
E.F.
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 12
Analizando barra por barra colocando las deformaciones de las barras en función de los
desplazamientos vertical y horizontal del punto B, tenemos :
L i f ( V , H )
Barra 1:
ΔL1 a b
a
sen45º
45º
δ
B
L1
Recta Auxiliar
45º
a
B
b 45º
cos45º
b
δ
a δV sen45º
B
B
V
b δH cos45º
B
B
H
B
B
ΔL1 δV sen45º δH cos45º
Barra 2
L2
L2 H
B
B
BH
Barra 3
L 3 a b
B
20º
L3
sen 20º
20º
cos 20º
B
V
b
Aux
B
a
20º B B
a
b
B
a V sen 20º
B
B
V
b H cos 20º
B
H
L 3 V sen 20º H cos 20º
B
B
H
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 13
b) Parte estática
F
V
y
N1
N2
45º
20º
N1sen 45º N 3sen 20º 8000
B
F
x
H
N3
0
P= 8000 Kg
0
N1 cos 45º N 2 N 3 cos 20º 0
c) Parte Física
L 1
N * 200
L 2 2
E*A
200
N3 *
cos 20º
L 3
E*A
200
cos 45º
E*A
N1 *
d) Parte final
Remplazando las expresiones ⑥ en las ecuaciones ①,② y ③ tenemos:
N 1 .L
BV Sen 45 O BV Cos 45 O ⑦
o
E.A.Cos 45
N 2 .L
BH
E.A
⑧
N 3 .L
BV Sen 20 O BV Cos 20 O ⑨
o
E.A.Cos 20
Que conjuntamente con las expresiones ④ y ⑤ forman las cinco ecuaciones con cinco incognitas
para resolver.
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 14
④N1sen 45º N 3sen 20º 8000
⑤ N1 cos 45º N 2 N 3 cos 20º 0
Resolviendo el sistema de ecuaciones nos da como resultado lo siguiente:
N 1 8449.32 k 1
N1
k
1408.22 2 (Traccion )
A1
cm
N 2 408.91 k 2
N2
k
68.15 2
A2
cm
(Compresion)
N 3 5922.74 k 3
N3
k
987.12 2
A3
cm
(Compresion)
BH 0.0068 cm (Se desplaza del punto B hacia la izquierda )
BV 0.2885 cm
(Se desplaza del punto B hacia abajo )
El signo negativo que aparecen en los resultados solamente significa que el sentido es contrario al
asumido en la propuesta.
3.4.2 Problemas debido a error de montaje:
Son aquellas tensiones que aparecen en los sistemas estructurales debido a la aplicación
de una fuerza momentánea para corregir algún error de dimensión que haya tenido alguno de los
elementos, producto de una falla en la fabricación de los mismos, es bueno aclarar que este error
de dimension debe ser pequeño en relación a las dimensiones del elemento a corregir.
L
δ = Error de montaje
Existen dos posibilidades si deseamos corregir el error de dimension de la barra central de la
cercha metálica mostrada en la figura:
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 15
fabricar otra barra con la dimensión correcta
Aplicar una fuerza momentánea de tal forma de deformar la barra hasta ponerla en su
sitio.
El caso que nos interesa es el segundo ya que nos ahorraríamos el costo y el trabajo de fabricar
otra barra, pero este caso produce esfuerzos en las demás barras del sistema, siendo necesario
verificar estas tensiones de tal manera de asegurar que no fallen producto de la corrección
realizada. En este inciso se aprenderá a calcular dichas tensiones, para lograr este objetivo
procederemos a analizar los sistemas estructurales que tengan error de montaje en alguno de sus
elementos siguiendo la metodología aprendida en el inciso anterior.
Ejemplo 5:
Sea el sistema estructural de la figura que consta de tres barras elásticas, por error de
fabricación la barra central es mas corta de lo que necesita. Determinar las tensiones en todas las
barras elásticas producto del error de montaje (δ)
Datos
Barras elásticas
E
A1 = A2 = A
L
L
= Error de montage
Incógnitas
1 = ?
L
2 = ?
δ = Error de montaje
Solución:
Chapa rígida
a) Parte Geométrica:
´
L2
L1
L1
EI2 (Estado inicial barra 2- no deformado)
E.F. (Estado Final deformado)
EI1 (Estado inicial barra 1- no deformado)
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 16
Propuesta de deformacion
①
L1 L 2
L1 = acorta, entonces N1 (compresión)
L2 = alarga, entonces N2 (tracción)
Ecuación de compatibilidad
de deformaciones
b) Parte estática:
N1
N2
F
N1
V
0
2 N1 N 2 0
②
Ecuación equilibrio estático
c) Parte física
Barra Cu:
N *L
L1 1
E*A
Barra Ac:
L
L 2
③a
L1
Ecuación física
N 2 * 2L
E*A
③b
2L
Ecuación física
N1
L2
c) Parte final
N2
Reemplazando las ecuaciones físicas ③a y ③b en ①
N 1 * L N 2 * 2L
E*A
E*A
De la expresión ② tenemos que : N 2 2N1
Remplazando ⑤ en ④ tenemos:
5..E.A
L
10..E.A
N2
L
N1
Despejando tenemos:
④
⑤
N 1 * L 2 N 1 * 2L
E*A
E*A
1
N 1 5..E
A1
L
2
N 2 10..E
A2
L
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 17
3.5 Problemas debido a la variación de temperatura
La mayor parte de los materiales usados en la ingenieria debido a las variaciones de
temperatura sufren cambio de sus dimensiones. Si la temperatura aumenta el material se dilata o se
alarga, mientras que si la temperatura disminuye, el material se contrae o se acorta. Si el material
es homogéneo y isòtropo,se ha encontrado que la deformación de un elemiento debido a la
variacion de la temperatura viene dada por:
t * t * L
donde:
: Coeficiente de dilatación térmica del
material.
t t f t i :Variación de temperatura
L
t
t f = Temperatura final.
ti
= Temperatura inicial.
L = Longitud del elemento estructural.
t , entonces el material se alarga debido al calentamiento.
t , entonces el material se acorta debido al enfriamiento.
Tabla de coeficiente de dilatación
Material
Acero
Aluminio
Bronce
Fundición Gris
Latón
Cobre
( ºC-1)
11.6X10-6
23.4X10-6
18.0X10-6
10.8X10-6
18.7X10-6
18.0X10-6
En los sistemas estaticamente determinados se dejan deformar libremente los elementos debido al
cambio de temperatura ( t ), este efecto no produce tensiones o esfuerzos en los elementos.
L
t
t libre 0
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 18
En cambio en sistemas estaticamente indeterminados las deformaciones debido a la variacion de
temperatura suelen estar restringidos parcial o totalmente, como resultado de ello aparecen fuerzas
internas que contrarestan parcial o toltalmente, estas deformaciones. Las tensiones originadas por
estas fuerzas internas se las llama tensioines tèrmicas o esfuerzos termicos.
La determinacion de las tensiones tèrmicas puede efectuarse usando la metodologia delineados
anteriormente, la unica salvedad es que en la parte geometrica se debe incluir un estado de
deformación producido por la variacion tèrmica dejando al elemento deformar libremente por la
variacion de temperatura de tal forma que el efecto de contrarestar esta deformación sea la que
ocaciona tension.
L
t
N
N
N
LN
t Re strigida 0
Ejemplo 6:
Determinar la tensión que aparecerà en una varrilla de acero de 2.50m, cuya sección es de 12cm2
al decender la temperatura a -20 oC, si la tensión de la varrilla es nula a los +20 oC. Para los siguiente
casos:
a. Muros completamente rìgidos e indeformables.
b. Muros que ceden ligeramente, acortàndose su distancia en 0.5 mm.
Datos
L
L = 2.50 m.
A = 12 cm2
Caso (a)
ti = +20 oC
tf = -20 oC
L
Δt = tf - ti = - 40 oC
α = 11.70x10-6 (oC)-1
Eac = 2.1X106 Kg/cm2
Δ = 0.5 mm.
Caso (b)
Δ = 0.5 mm.
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 19
Incógnitas
Caso (a)
σ =?
Caso (b)
σ =?
Solución: Caso (a): Muros rigidos
a) Parte Geométrica
A
B
Estado inicial no deformado
δt
Estado deformado Δt: se deja deformar
libremente (no produce tensión)
Estado Final o Estado de equilibrio:se obliga
al elemento a deformarse hasta llegar a la
posición de equilibrio (produce tensión).
ΔLB
δt = ΔLB
① Ecuación de compatibilidad de deformación
Donde:
δt = α.Δt.L deformación debido a la variacion de temperatura
Propuesta
ΔLB = Alargamiento
NB = Tracción
b) Parte estática:
Para que se produzca ΔLB obligatoriamente esta ha tenido que ser ocasionada por una
fuerza interna NB, quedando el sistema de equilibrio de la siguiente manera:
NA
N 0
NB
N A NB
② Ecuación de equilibrio estático
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 20
c) Parte física:
Planteamos la ley de Hooke para relacionar las deformaciones con las fuerzas aplicadas de
cada elemento, para nuestro caso:
L B
N B .L
E.A
③ Ecuación fisica
d) Parte final:
Remplazamos ③ en ① y tenemos:
.t.L
N B .L
N
N B .t.E.A B .t.E
E.A
A
Remplazando los datos tenemos: σ = 982.80
k
cm 2
Respuesta
Caso (a)
Solución: Caso (b): Muros deslizables
a) Parte Geométrica
Δ
A
B
Estado inicial no deformado
Estado deformado Δt: se deja deformar
libremente (no produce tensión)
δt
Estado Final o Estado de equilibrio:se obliga
al elemento a deformarse hasta llegar a la
posición de equilibrio (produce tensión).
ΔLB
δt = ΔLB + Δ
① Ecuación de compatibilidad de deformación
Donde:
δt = α.Δt.L deformación debido a la variacion de temperatura
Propuesta
ΔLB = Alargamiento
NB = Tracción
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 21
b) Parte estática:
Para que se produzca ΔLB obligatoriamente esta ha tenido que ser ocasionada por una
fuerza interna NB, quedando el sistema de equilibrio de la siguiente manera:
NA
N 0
NB
N A NB
② Ecuación de equilibrio estático
c) Parte física:
Planteamos la ley de Hooke para relacionar las deformaciones con las fuerzas aplicadas de
cada elemento, para nuestro caso:
L B
N B .L
E.A
③ Ecuación fisica
d) Parte final:
Remplazamos ③ en ① y tenemos:
.t.L
N B .L
N
(.t.L ).E.A
(.t.L ).E
NB
B
E.A
L
A
L
Remplazando los datos tenemos: σ = 562.80
k
cm 2
Respuesta
Caso (b)
Ejemplo 7:
Sea el sistema estructural mostrado en la figura que está sometida la barra de latón a una diferencia
de temperatura de - 30ºC y la barra de acero a +30ºC, calcular los esfuerzos o tensiones en las
barras de latón y acero.
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 22
Datos
A L 7 cm 2
L 18.7 X10 6 º C 1
+30ºC
E L 1X10 6 Kg / cm 2
Acero
A ac 3 cm 2
③
30 cm
ac 11.6X10 6 º C 1
E ac 2X10 6 Kg / cm 2
t ac 30 o C
Chapa rígida
t lat 30 o C
latón
Incógnitas:
45 cm
-30ºC
L
ac
30 cm
45 cm
Solución
a) Parte Geométrica
a1) Deformación debido a la variación de la temperatura ti
Acero:
30 cm
tac = +30ºC
alarga
tac
Estado
inicial
Estado
Δt
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 23
Latón:
tL
t
t
45 cm
t
L
L
L
L * t L * L L
18.7X10 6 * 30 * 45
0.0252 cm
acorta
Acero
tac
tL
LL
Lac
E.I. (Estado no deformado)
E.tac (Estado deformado t del acero)
E.F. (Estado deformado de equilibrio)
latón
E.tL(Estado deformado t del Laton)
Propuesta de deformacion
ΔLAc = Alargamiento → NAc = Traccion
ΔLL = Alargamiento → NL = Traccion
Entoces Tenemos:
Acero
tL- LL
EI
tac+Lac
latón
E.F.
30 cm
(Estado Inicial deformado)
45 cm
(Estado Final deformado)
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
t L LL
30
Unidad 3 - 24
tac Lac
75
2.5 * t L LL t ac Lac
Lac 2.5LL 2.5t L t ac
Lac 2.5LL 0.0526
Ecuación de compatibilidad
de deformaciones
①
b) Parte estática:
M
Nac
A
NL
0
30 N L 75N ac 0
45 cm
30 cm
A
②
Ecuación equilibrio estático
c) Parte física
Barra de Laton
Barra de acero
L L
N * L ac
L ac ac
E ac * A ac
NL * LL
E
L
*A
L
3.6 Tensiones y deformaciones en cilindros de pared
delgada.
Ejemplos
t
t
r
t
r
2r
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Condicion para ser considerado cilindro de pared delgada
donde:
Unidad 3 - 25
r
t
10
r = radio generador
t = espesor de la pared delgada.
Si existen presiones internas existen tensiones:
σL
σa
σa
Pi
dA
σL
Debido a que partimos de la condicion que el cilindro es de pared delgada, podemos realizar el
estudio tensional de forma unidimensional.
Estudiaremos dos tipos de cilindros de pared delgada.
a)
Cilindros generados por un radio de curvatura
b)
Cilindros generados por dos radios de curvatura.
c)
r
r2
r1
a)
b)
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 26
3.6.1 Cilindros de un radio de curvatura:
a)
Tensiones:
σL
dA
Lo que queremos
estudiar
σL
Estado de carga
Donde:
σa
σa
Pi
σa = Tension anular
Estado tensional
σL = Tension longitudinal
Por separado tenemos:
dA
σa
σa
σL
dA
P
i
Pi
σL
σa = Tension anular
σL = Tension longitudinal
Analizando el elemento diferencial:
Pi
t
dS
dA
Pi
σa
σa
dθ
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Pi
F
V
dx
σa
dS
t
Unidad 3 - 27
0
d
Pi dS dx 2 a t dx sen 0
2
dS r d
σa
d d
si d es pequeño, sen
2 2
d
Pi r d dx 2 a t dx
0
2
dθ
Ecuación que gobierna Las
Pi r tensiones anulares en paredes
a
delgadas de cilindros de un
t
radio de curvatura.
Partiendo del conocimiento que las fuerzas horizontales se anulan:
Pi . 2r . L
σa.t.L
L
2r
V 0
Pi 2r L 2 a t L
a
Pi r
t
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 28
a2) Tension Longitudinal:
σL.2πr.t
Pi
Pi.πr2
F 0
L 2 r t Pi r 2
L
Ecuación que gobierna las tensiones
longitudinales en paredes delgadas de
cilindros de un radio de curvatura.
Pi r
2t
b) Deformaciones:
σL
corte
L
corte
L
σa
σa
σL
2πr
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Estas tensiones producen deformaciones
Unidad 3 - 29
σL
ΔLL
σa
L
2πr
ΔLa
ΔLa = Deformación del perímetro debido a la σa
ΔLL = Deformación de la longitud debido a la σL
Por tanto:
L
NL
N
, Sabiendo que : , entonces
EA
A
L
L
E
luego:
L a
a 2r Pi r 2r
E
t E
L a
2r 2 Pi
tE
L L
L L Pi r L
E
2 t E
LL
L r Pi
2t E
3.6.2 Cilindros con dos radios de curvatura:
σ1
σ2
dA
Pi
σ2
σ1
Estado de carga
Estado tensional
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 30
Analizando el elemento diferencial
Pi
1
t
dS1
2
2
dS2
1
d1
d2
O1
V 0
O2
d
d
Pi dS1 dS 2 21 dS 2 t sen 2 2 dS1 t sen 0
2
2
dS1 r1 d1
d d
si di es pequeño, entonces : sen i i
dS 2 r2 d 2
2
2
Reemplazando:
d1
d
2 2 r1 d1 t
0
2
2
1
r1 r2 t
Pi r1 d1 r2 d 2 21 r2 d 2 t
Pi r1 r2 1 r2 t 2 r1 t
Pi 1 2
t
r1
r2
Ecuación que gobierna las tensiones en
cilindros de pared delgada con dos radios de
curvatura
Ing. Elías Belmonte C.
TENSIONES Y DEFORMACIONES EN SISTEMAS HIPERESTATICOS
Unidad 3 - 31
Ejemplo 7:
Determinar la ecuación que gobierna las tensiones de una pelota de basketball sometida a una
presión interna qi.
Datos
r1 = r2 = r
t = espesor
qi = presión
Incógnitas
1 = 2 =
como es una pelota totalmente esférica r1 = r2 = r
Aplicando la fórmula para un cilindro de pared delgada de dos radios de curvatura tenemos:
qi
t
r r
qi 2
t
r
qi r
2t
Solución seccionando la pelota:
qi**r2
V 0
t
qi r 2 2 r t
qi r
2t
*2r*t
Ing. Elías Belmonte C.
Unidad 4 - 1
TORSION
Unidad 4
Torsión
4.1 Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes
objetivos trazados para el Estudio de tensiones en estructuras sometidas a momentos torsores
1. Determinar y aprender a analizar estructuras o elementos se sección circular,
sometidos a momentos torsores, determinando (τ ,ϕ ) las tensiones cortantes y los
giros o deformaciones.
2. Dimensionar elementos de sección circular sometidos a torsión.
3. Analizar uniones o bridas empernadas determinando (τ ,φ , P )
4. Determinar τ en secciones de pared delgada sometidas a momentos torsores. (Mt )
5. Aprender a utilizar, expresiones de τ y φ para solucionar problemas de secciones no
circulares, sometidos a torsión.
4.2 Introducción
τ,φ
τ , ΔL
Mt
N
En anteriores
capítulos
En este capítulo se
somete a torsión
La torsión estudia los esfuerzos internos (τ tensión cortante) y deformaciones (φ giros)
provocados por momentos torsores en secciones de cualquier elemento estructural.
Ing. Elías Belmonte C.
Unidad 4 - 2
TORSION
4.3 Formulación
Sea un árbol de sección circular como muestra la figura
Lo que queremos encontrar son las ecuaciones
a
que gobiernan, las tensiones cortantes (τ) y
a
(τ , φ)
deformaciones, giros (φ) en cualquier sección del
elemento.
Mt
Sección circular
a) Parte geométrica
Donde:
S = Arco de desplazamiento.
0
ρ
dA
L = Longitud
γ = Distorsión Angular
φ= Giro
γ
L
ρ= Radio
dA= Diferencial de arco
dA
ρ
φ
0
dA
Mt
S
Estado
inicial
Estado final
Ing. Elías Belmonte C.
Unidad 4 - 3
TORSION
Analizando por separado:
γ
γ=
S
L
⇒ S = γ⋅L
ϕ=
S
ρ
⇒ S = ϕ⋅ρ
Igualando ambos
L
0
φ
ρ
γ ⋅L = ϕ⋅ρ
γ=
ϕ⋅ρ
L
①
Ecuación de compatibilidad
de deformaciones
S
b) Parte estática
ρ
dP
0
dA
Mt
∑ Mt = 0
Mt − ∫ ρ dp = 0
A
Sabemos que: dp = τ ⋅ dA
Ing. Elías Belmonte C.
Unidad 4 - 4
TORSION
Mt − ∫ τ ⋅ ρ ⋅ dA = 0
Entonces:
A
Mt = ∫ τ ⋅ ρ ⋅ dA
A
②
Ecuación equilibrio estático
c) Parte física
τ = G⋅γ
③ Ley de Hooke
c) Parte final
Reemplazo ① en ③
τ = G⋅
ϕ⋅ρ
L
④
donde: G = módulo de elasticidad transversal
Reemplazo ④ en ②
Mt = ∫ G ⋅
A
ϕ⋅ρ
ρ ⋅ dA
L
entonces Mt =
G ⋅ϕ
⋅ ∫ ρ 2 ⋅ dA
L A
Sabiendo que Inercia polar: Ip = ∫ ρ 2 ⋅ dA , luego:
A
Mt =
G⋅ϕ
⋅ Ip
L
finalmente:
⑤
Mt ⋅ L
G ⋅ Ip
ϕ⊗ =
[rad ]
Ecuación que gobierna las
deformaciones
Reemplazo ⑤ en ④
τ = G⋅
Mt ⋅ L ρ
⋅
G ⋅ Ip L
finalmente: τ ⊗ =
Mt ⋅ ρ
Ip
⎡ Kg ⎤
⎢ 2⎥
⎣ cm ⎦
Ecuación que
gobierna las
tensiones cortantes
Ing. Elías Belmonte C.
Unidad 4 - 5
TORSION
4.4 Tensiones máximas
a) Sección circular llena:
τmáx
-
+
r
τmáx
r
d
ρ=0
entonces τ • = 0
entonces τ • máx
ρ=r
Mt ⋅ r
=
Ip
π ⋅ d4
pero: Ip =
32
•
reemplazando Ip
τ •máx =
16 ⋅ Mt
Mt ⋅ r
, resumiendo la fórmula se tiene: τ •máx =
4
π⋅d
π ⋅ d3
32
a) Sección circular hueca:
τmáx
d
+
τmáx
D
τ •máx
D
= D 2 d reemplazando el valor de Ip
(Ip − Ip )
Mt ⋅
finalmente: τº máx =
Mt ⋅ D
π ⋅ D4 − d4
(
τ • máx =
Mt ⋅
D
2
⎛ π ⋅ D4 π ⋅ d 4 ⎞
⎜
⎟
−
⎜ 32
⎟
32
⎝
⎠
)
Ing. Elías Belmonte C.
Unidad 4 - 6
TORSION
Ejemplo 1:
Un árbol de sección constante de 5 cm de diámetro está sometido a pares torsores a través
de ruedas dentadas montadas sobre él, como muestra la figura. Si el módulo de elasticidad
transversal es G = 8.4X105 Kg/cm2 determinar en grados, el ángulo de giro total entre los
puntos A y D.
MD = 5000 k-cm
Datos
MB = 10000 k-cm
G = 8.4X105 Kg/cm2
Incógnita
MC = 9000 k-cm
ϕA-D = ?
1.60 m
5 cm
1.00 m
1.20 m
MA = 6000 k-cm
D
C
B
A
Solución
Otra forma de representar
MB =10000 k-m
MA = 6000 k-cm
MD = 5000 k-cm
MC = 9000 k-cm
A
•
1.20 m
B
D
Planteando la ecuación de deformación desde A hasta D tenemos:
ϕ AD = ϕ AB + ϕ BC + ϕCD
•
1.60 m
1.00 m C
(a)
Aplicando la fórmula que gobierna los giros para cada elemento del árbol
ϕ=
Mt ⋅ L
G ⋅ Ip
Tenemos:
ϕ AB =
ϕ AB =
(M A ) ⋅ 120
8.4 X 10 ⋅ Ip
5
= 0.0139 rad
(M A − M B ) ⋅ 100
8.4 X 10 5 ⋅ Ip
= −0.0078 rad
(b)
(c)
Ing. Elías Belmonte C.
Unidad 4 - 7
TORSION
ϕ AB =
(M A − M B + M C ) ⋅ 160
8.4 X 10 5 ⋅ Ip
(d)
= 0.0155 rad
Remplazando (b), (c),(d) en (a):
ϕ AD = 0.02173 rad ×
57.3º
= 1.25º
1rad
ϕ AD = 1.25º
4.4 Sistemas Hiperestáticos
a) Parte Geométrica
Se compara geométricamente los giros de los elementos proponiendo una ecuación de
compatibilidad de deformaciones.
Ecuación en función de los giros:
ϕ
b) Parte Estática
Se plantean ecuaciones de equilibrio estático
∑ Mt = 0
c) Parte Física
Se calcula cada uno de los giros
ϕi =
Mti ⋅ L
G ⋅ Ip
d) Parte Final
Solución de la ecuación.
Ejemplo 2 :
Sea el árbol mostrado en la figura determinar el diagrama de momentos cortantes,
tensiones cortantes y giros
Datos
4 Mt
Mt
Mt
L
D
2d
d
G
L
L
2L
A
B
C
2L
D
E
Ing. Elías Belmonte C.
Unidad 4 - 8
TORSION
Incógnitas
Diagramas
Mt
ϕ
τ
Solución
a) Parte Geométrica
ϕ AB + ϕ BC + ϕCD + ϕ DE = ϕ E = 0
Ecuación de compatibilidad
de deformaciones
①
b) Parte Estática
4 Mt
Mt
ME
MA
L
L
2L
A
B
C
E
D
4 Mt
Mt
MA
2L
∑ Mt = 0
M A − Mt − 4Mt + M E = 0
ME
2L
L
B
A
2L
L
D
C
M A + M E = 5Mt
E
②
Ecuación equilibrio estático
c) Parte física
*Cálculo de la inercia polar:
d
Ip =
π ⋅d4
32
Ip
2d
Ip* =
π ⋅ (2d )
4
32
= 16 ⋅
π ⋅d
32
4
⇒ Ip* = 16 Ip
Utilizamos la fórmula de los giros, y analizando por tramos:
ϕi =
Mt i ⋅ L
G ⋅ Ip
Ing. Elías Belmonte C.
Unidad 4 - 9
TORSION
4 Mt
Mt
MA
ME
2L
L
E
D
C
B
A
2L
L
Tramo AB:
ϕ AB =
M A ⋅ 2L
G ⋅ Ip
Tramo BC:
ϕ BC =
(M A − Mt ) ⋅ L
G ⋅ Ip
③ Ecuaciones físicas
Tramo CD:
ϕ CD =
(M A − Mt ) ⋅ L = (M A − Mt ) ⋅ L
G ⋅ 16Ip
G ⋅ Ip *
Tramo DE:
ϕ CD =
(M A − 5Mt ) ⋅ 2L (M A − 5Mt ) ⋅ 2L
G ⋅ Ip *
=
G ⋅ 16Ip
d) Parte Final
Reemplazando los giros en ①:
ϕ AB + ϕ BC + ϕCD + ϕ DE = ϕ E = 0
M A ⋅ 2L (M A − Mt ) ⋅ L (M A − Mt ) ⋅ L (M A − 5Mt ) ⋅ 2L
=0
+
+
+
G ⋅ Ip
G ⋅ Ip
G ⋅ 16Ip
G ⋅ 16Ip
* 16
32M A + 16M A − 16Mt + M A − 16 + 2M A − 10Mt = 0
4 Mt
51M A = 27Mt
MA= 0.53 Mt Mt
M A = 0.53Mt ④
ME = 4.47 Mt
Reemplazo ④ en ②
M E = 4.47 Mt
L
2L
A
B
L
2L
D
E
Ing. Elías Belmonte C.
Unidad 4 - 10
TORSION
Diagramas:
A
B
2L
L
C
D
L
2L
4.47 Mt
+
_
+
+
“Mt”
0.53 Mt
0.53 Mt
0.47 τ
+
_
0.53 τ
4.47 Mt
0.47 Mt
0.47 Mt
E
0.47 τ
0.058 τ
0.56 τ
0.56 τ
+
“τ ”
0.53 τ
0
_
_
1.06 ϕ
0.59 ϕ
0
“ϕ”
0.56 ϕ
* Cálculo del diagrama:
τ=
Mt ⋅ r
Ip
Tramo AB:
τ AB =
0.53Mt ⋅ r
= −0.53τ
Ip
Tramo BC:
τ BC =
0.47 Mt ⋅ r
= +0.47τ
Ip
Ing. Elías Belmonte C.
Unidad 4 - 11
TORSION
Tramo CD:
0.47 Mt ⋅ 2r
= +0.058τ
16 Ip
τ CD =
Tramo DE:
4.47 Mt ⋅ 2r
= +0.56τ
16 Ip
τ DE =
* Cálculo de:
ϕ=
Mt ⋅ L
G ⋅ Ip
Tramo AB:
ϕ AB =
0.53Mt ⋅ 2l
= −1.06ϕ
G ⋅ Ip
Tramo BC:
ϕ BC =
0.47Mt ⋅ l
= +0.47ϕ
G ⋅ Ip
Tramo CD:
ϕ CD =
0.058Mt ⋅ l
= +0.03ϕ
G ⋅ 16Ip
Tramo DE:
ϕ DE =
4.47Mt ⋅ 2l
= 0.56ϕ
G ⋅ 16Ip
* Cálculo de los giros
ϕA = 0
ϕ A = ϕ AB = −1.06ϕ
ϕ C = ϕ B + ϕ BC = −1.06ϕ + 0.47ϕ = −0.59ϕ
ϕ D = ϕ C + ϕ CD = −0.59ϕ + 0.03ϕ = −0.56ϕ
ϕ E = ϕ D + ϕ DE = −0.56ϕ + 0.56ϕ = 0
Ing. Elías Belmonte C.
Unidad 4 - 12
TORSION
Ejemplo 2
Determinar la tensión normal que sucede en las barras elásticas que sustentan el apoyo C
de la siguiente estructura mostrada en la figura.
Datos
Mt = 700 Kg.m
A
L = 2.00 m
1.00 m
B
E
C
1.00 m
n φ
d = 10 cm
G = 0.4 E
d
φ = 2 cm
2.00 m
Incógnitas
Mt
σ1 = ?
n
2.00 m
D
Solución
a) Parte Geométrica
ϕA = 0
ϕ C + ϕ CB + ϕ BA = 0 ①
Ecuación de compatibilidad
de deformaciones
b) Parte Estática
MC
MA
Mt
MA
∑ Mt = 0
MC
Mt
M A + M C = Mt
②
Ecuación equilibrio estático
c) Parte física
•
Cálculo de ϕC:
M C = N C * 2r
NC
despejando NC
d = 2r
NC
NC =
MC
2r
(a)
Ing. Elías Belmonte C.
Unidad 4 - 13
TORSION
Las fuerzas NC producen deformación:
ΔLC
ϕC
r
ϕC =
r
ΔLC
r
(b)
ΔLC
Si seguimos analizando la barra 1
NC
ΔLC
ΔLC =
L1=2.00 m
NC ⋅ L1
E ⋅ Aφ
(c)
NC
Reemplazando (c) en (b)
ϕC =
N C ⋅ L1
E ⋅ Aφ
⇒
r
ϕC =
N C ⋅ L1
E ⋅ Aφ ⋅ r
(d)
finalmente reemplazando (a) en (d)
MC
⋅ L1
ϕ C = 2r
E ⋅ Aφ ⋅ r
ϕC =
⇒
Utilizando la ecuacion fisica de giros:
•
ϕ=
3a
M ⋅L
planteamos :
G ⋅ Ip
Cálculo de ϕCB:
ϕ CB =
•
M C ⋅ L1
2 E ⋅ Aφ ⋅ r 2
M C ⋅100
G ⋅ Ip
3b
Cálculo de ϕBA:
ϕ BA =
(M C − Mt ) ⋅100
G ⋅ Ip
3c
d) Parte Final
Reemplazando los giros en ①:
Ing. Elías Belmonte C.
Unidad 4 - 14
TORSION
M C ⋅100
2⋅ E ⋅
π ⋅2
4
2
⋅5
M C ⋅100
+
2
0.4 E ⋅
π ⋅10
4
+
(M C − 70000) ⋅100 = 0
0.4 E ⋅
32
π ⋅10 4
32
Simplificando se obtiene:
M C = 10000 Kg .cm
④
Reemplazo ④ en ②
M A = 60000 Kg .cm
por tanto σ1 será:
σ1 =
NC
MC
=
=
Aφ
2r ⋅ Aφ
σ 1 = 318
Kg
cm 2
10000
2*5*
π ⋅ 22
4
Tracción.
4.4 Acoplamiento o bridas empernadas:
Para transmitir torsión entre dos elementos se realizan acoplamientos entre sí a través de uniones
con pernos como se muestra en la figura.
P
P
P
P=
τ.Aφ
R
P
P
Mt
P
P
∑ Mt = 0
Mt = n * P * R = n * τ *
π ⋅ φ2
*R
4
1a
donde: n = Número de secciones de pernos
Ing. Elías Belmonte C.
Unidad 4 - 15
TORSION
τ = Tensión cortante
φ = Diámetro de la sección del perno
R = radio
Si se tiene más de un radio:
P
P
P
P
R3
P
R2
R1
P
P
Mt
P
∑ Mt = 0
1b
Mt = n 1 * P1R 1 + n 2 * P2 R 2 + n 3 * P3 R 3 + ........ + n m * Pm R m
P1
P2
R1
P3
R2
R3
Ing. Elías Belmonte C.
Unidad 4 - 16
TORSION
Ejemplo 3
Determinar el diámetro (∅) de la sección del roblón que puede soportar una carga P=8000
kg de tal manera de no sobrepasar la tensión admisible de corte de 700 Kg/cm2.
P
48 cm
P
6 cm 12 cm
24 cm
6 cm
Solución
a) Cálculo del baricentro del grupo de roblones.R1
R2
P3
Mt
cg
P1
12 cm
XG =
R3
P2
∑A x
∑A
i
i
i
=
x
24 cm
0 + A * 12 + A * 36
= 16cm
3* A
b) Cálculo de los radios
R1 = 16 cm
Pcrítico = P3
R2 = 4 cm
Por estar más alejado del centro de gravedad
R3 = 20 cm
c) Aplicación de la 1era ecuacion
Mt = P1 R1 + P2 R2 + P3 R3
①
Ing. Elías Belmonte C.
Unidad 4 - 17
TORSION
d) Aplicación de la 2da ecuacion
P1 =
P
P1 P2
=
= 3
R1 R2 R3
P3
R1
R3
②
P2 =
P3
R2
R3
e) Parte final
② en ①
Mt =
P3 2 P3 2 P3 2
R1 +
R2 +
R3
R3
R3
R3
(
P*d =
P3
R 12 + R 22 + R 32
R3
P*d =
P3
R3
∑R
1) τ =
Sabiendo que:
2
i
)
③
P
A
2) A = 2 * Aφ (Dos areas de corte por roblon)
3)
Pcrit = P3
Entonces tenemos que:
τ adm =
P3
2Aφ
P3 = 2 * τ adm * Aφ
Reemplazando en ③
P*d =
P*d =
τ adm 2Aφ
R i2
∑
R3
τ adm * 2 *
R3
πφ 2
4
∑R
2
i
Ing. Elías Belmonte C.
Unidad 4 - 18
TORSION
Despejando φ se tiene:
φ=
2 * P * d * R3
τ adm * π * ∑ ri 2
φ=
2 * 8000 * 48 * 20
600 * π * 16 2 + 4 2 + 20 2
(
)
φ = 3.48cm
Ejemplo 2
Determinar el valor de la fuerza P que puede soportar el grupo de roblones de tal manera
de no sobrepasar la tensión admisible de corte de 700 Kg/cm2.
Datos
τadm = 700Kg/cm2
P= ?
φR = 16 mm
Incógnitas
9 cm
Pmáx = ?
8 cm
8 cm
8 cm
8 cm
4 cm
6cm
15 cm
6cm
P= ?
Solución
Fórmulas a utilizar:
1.
Mt = ∑ M i Pi R i
2.
P1
P
P
+ 2 + .... = n
R1 R 2
Rn
3.
τ=
P
Aφ
Ing. Elías Belmonte C.
Unidad 4 - 19
TORSION
a) Cálculo del baricentro del grupo de roblones.y
xG = 5 cm
Mt = P1 R 1 + P2 R 2 + P3 R 3
P2
R2
8 cm
Mt
P3
R3
cg
R1
yG = 8 cm
8 cm
Cálculo del baricentro:
xG =
0 + 0 + A ⋅ 15
= 5 cm
3A
yG =
0 + A ⋅ 16 + A ⋅ 8
= 8 cm
3A
x
P1
15 cm
b) Cálculo del radio:
R 1 = R 2 = 5 2 + 8 2 = 9.43 cm
R 3 = 10 cm
Por ser el m’as alejado
del centro de gravedad
Pcrítico = P3
8 cm
R2
R3
5 cm
10 cm
Entonces la ecuación será
P ⋅ d = P1 R 1 + P2 R 2 + P3 R 3
①
c) Planteo de la ecuación 2
P
P
P1 P2
=
= 3 como P3 es crítico, dejamos todo en función de 3
R1 R2 R3
R3
Ing. Elías Belmonte C.
Unidad 4 - 20
TORSION
P1 =
P3
R1
R3
entonces:
P
P2 = 3 R2
R3
②
② en ①
P⋅d =
P3 2 P3 2 P3 2
R3
R2 +
R1 +
R3
R3
R3
P*d =
P3
R 12 + R 22 + R 32
R3
P*d =
P3
R3
(
∑R
2
i
)
③
de la fórmula:
τ=
P3
Aφ
Reemplazando en ③
P⋅d =
P3 = τ adm ⋅ Aφ
τ adm ⋅ Aφ
∑ R i2
R3
πφ 2
τ adm ⋅
4
P=
R3 ⋅d
∑R
2
i
Reeplazando datos
π ⋅ (1.6)
700 ⋅
4
P=
⋅ 9.43 2 + 9.43 2 + 10 2
10 ⋅ 29
2
(
)
Pmáx = 1348.46 Kg
Ing. Elías Belmonte C.
Unidad 4 - 21
TORSION
4.5 Torsión en tubos de pared delgada
r
t
Mt
L
4.5.1 Condiciones de pared delgada
a)
b)
r
10
Las tensiones τ se distribuyen uniformemente en el espesor t de la pared
t <<<< r
≈t =
τ1
τ1
-
-
τ2
+
τ1 ≠ τ 2
τ1 = τ 2
c)
τ2
+
Tensión Uniforme
Consta que no existe cambios bruscos en la sección que distorsiona el flujo de tensiones.
t1
t2
Concentración de
tensiones
Ing. Elías Belmonte C.
Unidad 4 - 22
TORSION
d)
Flujo constante de tensiones de corte independiente al espesor de la pared “t”.
t2
∑F = 0
τ2
τ 1 ⋅ dz ⋅ t1 − τ 2 ⋅ dz ⋅ t 2 = 0
τ 1 ⋅ t1 = τ 2 ⋅ t 2
Flujo constante
τ1
dz
t1
4.5.2 Formulación de la ecuación
∑ Mt = 0
Mt − ∫ τ ⋅ ρ ⋅ dA = 0
A
dA = tdz
ρ
t
Mt
L
Mt = ∫ τ ⋅ t ⋅ ρ ⋅ dz
dz
dA* =
ρ ⋅ dz
2
2dA* = ρ ⋅ dz
ρ
ρ
Mt = τ ⋅ t ⋅ ∫ 2 ⋅ dA *
dA*
Ing. Elías Belmonte C.
Unidad 4 - 23
TORSION
Mt = 2 ⋅ τ ⋅ t ⋅ ∫ dA *
A
A*
A* = El área inscrito en el
perímetro medio de la
pared delgada
Mt = 2 ⋅ τ ⋅ t ⋅ A *
τ=
Mt
2 ⋅t ⋅ A*
4.7
Ejemplo 3
Un tubo de pared delgada de forma semicircular, presidiendo de la concentración de
tensiones que se puedan producir en las esquinas y su tensión admisible al corte es de 450
Kg./cm2 determinar el momento torsor que es capaz de soportar.
Datos
t=0.2cm
τ adm = 450 kg / cm2
5 cm
Solución
t=0.2cm
A* =
π ⋅d2
8
5 cm
Ing. Elías Belmonte C.
Unidad 4 - 24
TORSION
De la ecuación 4.7
τ=
Mt
2⋅t ⋅ A*
Mt = τ ⋅ 2 ⋅ t ⋅ A *
Mt = 2 ⋅ 450 ⋅ 0.2 ⋅
π ⋅ 52
8
Mt = 1767.15 Kg ⋅ cm
4.6 Torsión en secciones no circulares.FORMA
Rectángulo
Cuadrado
a
b
a
EFECTO
τ máx
ϕ
K1 ⋅
K2 ⋅
b
a
Mt
a ⋅ b2
4.81 ⋅
Mt ⋅ L
G ⋅ a ⋅ b3
Triángulo
Equilátero
Elipse
7.1 ⋅
a
a
a
a
Mt
a3
Mt ⋅ L
G ⋅ a4
16 ⋅
(a
Mt
π ⋅ a ⋅ b2
20 ⋅
)
+ b2
Mt ⋅ L
⋅
16π
G ⋅ a3 ⋅ b3
2
46 ⋅
Mt
a3
Mt ⋅ L
G ⋅ a4
Valores K1 y K2 para sección rectangular:
a/b
1,0
1,5
2,0
3,0
4,0
6,0
8,0
∞
K1
4,81
4,33
4,07
3,75
3,55
3,34
3,26
3,00
K2
7,10
5,10
4,37
3,84
3,56
3,34
3,26
3,00
Ing. Elías Belmonte C.
TENSIONES NORMALES EN VIGAS
1
Unidad N° 5
Tensiones Normales en Vigas
Flexión
5.1. Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes
objetivos trazados para el Estudio de tensiones normales en secciones de viga.
1. Determinar la ecuación que gobierna las tensiones normales debido a la flexión en
vigas
2. Dibujar la distribución de tensiones normales en cualquier sección transversal de una
viga.
3. Dimensionar cualquier sección de viga transversal capaz de soportar los esfuerzos
normales inducidos por la presencia de momentos flectores.
4. Determinar el Modulo Resistente para cualquier sección transversal de viga
5. Determinar la capacidad de carga que es capaz de resistir cualquier sección debido a la
flexión.
5.2.
Introducción
Las vigas son elementos estructurales cuyo principal objeto es transportar cargas a través
de su sección transversal. Cuando las cargas flexionan a la viga, estas en su interior producen
momentos flectores y fuerzas cortantes en la sección trasversal que son los que mantienen el
equilibrio el sistema.
El objetivo principal de esta unidad es establecer la relación que existe entre el momento
flector que actúa en la sección transversal y la distribución de tensiones normales que se
producen en ella, basándonos en las siguientes suposiciones:
El material de la viga es homogéneo, isótropo y obedece la ley de Hooke.
El modulo de elasticidad “E” es el mismo a tracción que a compresión.
TENSIONES NORMALES EN VIGAS
2
Las secciones transversales de la viga permanecen planas después de la flexión.
La sección transversal de la viga es simétrica con respecto al plano de aplicación
de las cargas y constante en toda su longitud.
Las cargas no ocasionan torsión ni pandeo en la viga.
En conclusión. La Flexión estudia los esfuerzos internos normales originados por la
presencia de momentos flectores en la sección transversal de viga. A estos esfuerzos internos
normales se los denomina Tensiones normales o Tensiones de Flexión en vigas.
5.3.
Formulación
Supongamos una viga simplemente apoyada de sección recta sometida a flexión pura, ósea
que solo necesita la presencia de momentos flectores en el interior de la viga para mantener su
equilibrio en el sistema en toda la longitud y como muestra los diagramas a continuación donde
fuerzas cortantes no existe.
M
M
b
h
dx
Sección
viga
L
+
M
Q
Lo que queremos encontrar es una relación que nos vincule el momento flector que se
produce en cualquier sección transversal, con sus respectivas respuesta interna de tensiones
normales. Para el análisis tomemos un elemento diferencial de la viga, para ello cortémosla en
dos secciones transversales contiguas separadas en “dx”, debido a que solo existe momentos
TENSIONES NORMALES EN VIGAS
3
flectores en la viga es que el sistema se puede equilibrar como muestra la figura y analizaremos
cual es la respuesta a deformación, como a equilibrio de de fuerzas de la superficie en estudio.
M
M
h
dx
Superficie
en
estudio
Elemento
diferencial
b
Sección
viga
a) Parte geométrica
Lo que pretendemos es plantear una ecuación de compatibilidad de deformación
partiendo de ver como se deforma la superficie en estudio, imaginémonos como puede deformar
el momento al elemento diferencial, manteniendo las secciones planas en este proceso, de la
figura que se muestra a continuación podemos plantear las siguientes conclusiones.
O
ΔL = Deformación de la superficie de análisis
ρ
dӨ
Ln = Línea neutra.
dx = Longitud inicial del elemento diferencial.
Superficie que
se acorta
ρ = Radio de curvatura.
y = Ubicación de la superficie de análisis
Ln
dx
y
respecto a la Ln.
dӨ = Angulo de deformación.
dӨ
ΔL Superficie que
Se alarga
TENSIONES NORMALES EN VIGAS
4
Si analizamos el esquema del elemento diferencial deformado vemos que la superficie
superior se acorta y la superficie inferior se alarga, es lógico suponer que existe entre ambas una
superficie que no se acorta, ni se alarga. A esta superficie se la denomina Superficie Neutra, mas
conocida como Línea Neutra.
Ahora veamos que ha sucedido con la superficie de análisis y plantemos una ecuación de
deformación.
ε
L
L
ε = Deformación unitaria
(a)
ΔL = Deformación de la sup. de análisis.
L = dx = ρdӨ
(b)
ΔL = y dӨ
(c)
L = Longitud del elemento diferencial.
remplazando (c) y (b) en (a) Tenemos:
ε
y
ρ
Ecuación de compatibilidad
de deformación
(A)
b) Parte Estática
Para encontrar la fuerza interna que equilibra el momento, se parte del conocimiento de
que fuerzas internas produjeron la deformación en la sección de análisis veamos nuevamente el
esquema de análisis.
M
Ln
h
y
dp = σ*dA
dx
Elemento
diferencial
Superficie en
estudio
b
Sección
viga
M Ln 0
M - A σ * y * dA 0
M σ * y * dA
A
Ecuación de equilibrio
estático
(B)
TENSIONES NORMALES EN VIGAS
5
c) Parte Física (Ley de Hooke)
σ Ε *ε
Ecuación Física
(C)
d) Parte Final
Remplazamos la expresión (A) en (C)
σ Ε*
y
ρ
(D)
esta ecuación muestra que las tensiones normales varían linealmente con la distancia desde la
línea neutra.
remplazamos la expresión (D) en (B)
y
E
M E * * y * dA y 2 * dA
A
ρ
ρ A
sabemos de la unidad Geometría de la Masas contenida en la materia isostática que la
expresión dentro la integral representa la inercia respecto a la Ln:
I Ln y 2 * dA
A
Inercia en Ln.
Remplazando la ILn en la expresión anterior tenemos:
1
M
ρ
E * I Ln
E
M I Ln
ρ
(E)
esta ecuación se la conoce con el nombre de Radio de curvatura y será la base para encontrar la
ecuación que gobierna las deformaciones en vigas, mas conocida como la Ecuación de la
Elástica que lo verán en Mecánica de los materiales 2.
Remplazando la expresión (E) en (D) tenemos:
σ E*y*
M
E * I Ln
σ
M*y
I
Ln
Ecuación de Tensiones
Normales en Vigas
o
Tensiones de Flexión
( 7.1.)
que es la Ecuación que gobierna las Tensiones normales en cualquier sección de viga y nos
vincula las tensiones normales con los momentos flectores actuantes. La cual nos indica que la
TENSIONES NORMALES EN VIGAS
6
tensión debida a flexión en cualquier sección es directamente a la distancia del punto considerado
a la línea neutra:
σ = Tensiones Normales o de Flexión
M = Momento Flector actuante en la sección
ILn = Inercia en la línea neutra.
y = Distancia de la línea neutra a la superficie análisis
Si analizamos la expresión de tensiones de flexión vemos que la distancia de la
línea neutra a la superficie de análisis (y) no esta definida, ya que no se conoce la ubicación de la
Ln, para encontrar esta ubicación volvamos al esquema presentado en la parte estática:
M
h
Ln
y
dp = σ*dA
dx
Elemento
diferencial
b
Sección
viga
∑FH = O
σ * dA 0
A
remplazando la expresión (D) tenemos:
E*y
* dA 0
A
ρ
los términos E, ρ son constantes y distintos de cero, sacando los de la expresión tenemos:
E
y * dA 0
ρ A
TENSIONES NORMALES EN VIGAS
7
Si:
E
0 Const
ρ
A
y * dA 0
Momento Estático
cuya expresión quedo definida en la unidad geometría de las masas en la materia Isostática como
momento estático, para que este se igual a cero necesariamente “y” tiene que ser igual acero y
para que pase eso obligatoriamente la Ln debe pasar por el centro de gravedad de la sección ósea:
Ln = Centro de gravedad de la sección
5.4.
( 7.2.)
Construcción del diagrama de tensiones
5.4.1. Secciones simétricas
Son aquellas secciones simétricas respecto a la línea neutra que coincide con el centro de
gravedad de la sección, y cuyas tensiones varían linealmente con la distancia a la línea neutra, lo
que ocasiona que las tensiones máximas de compresión y tracción sean de igual magnitud. Este
tipo de secciones son útiles para materiales que tengan la misma resistencia a tracción que a
compresión, ver Fig.
σmax
+
σmax
-
+
h
Csup= C
Ln
+
+
σmax
b
Sección viga
Rectangular
Diagrama de
Tensiones de Flexión
+
M
de las expresiones 7.1. y 7.2. tenemos:
σ
M*y
I
Ln
σmax
Diagrama de
Tensiones de Flexión
M
Cinf = C
TENSIONES NORMALES EN VIGAS
8
+ = σ- M * C
σmax= σmax
max
Donde: Cinf = Csup= C
I Ln
( 7.3. )
C = Fibra de la sección mas alejada de la Ln.
σ+max = Tensión normal máxima de tracción
- = Tensión normal máxima de compresión
σmax
Si M
+
entonces:
-
-
Compresión
+ Tracción
+
Si M
-
entonces:
+
+ Tracción
-
-
Compresión
Ejemplos de secciones Simétricas
Csup= C
Ln
Cinf = C
5.4.2.
Secciones asimétricas
Son aquellas secciones asimétricas respecto a la línea neutra la cual debe coincidir con el
centro de gravedad de la sección, y cuyas tensiones varían linealmente con la distancia a la línea
neutra, esta asimetría ocasiona que las tensiones máximas de compresión y tracción sean de
diferente magnitud. Este tipo de secciones son útiles para materiales que no tengan la misma
resistencia a tracción que a compresión, ver Fig.
TENSIONES NORMALES EN VIGAS
9
Csup
Csup
Ln
Ln
Cinf
Cinf
Csup
Csup
Ln
Ln
Cinf
Cinf
Entonces:
Csup Cinf σ max σ max
Quedando la expresión 7.1. y 7.2. de la siguiente manera para cada estado tensional
máximo mostrado en el siguiente esquema:
b1
b1
σmax
+
σmax
-
+
Csup= C
Ln
b
Sección viga
Asimétrica
+
σmax
Si el M entonces:
σmax
Diagrama de
Diagrama de
Tensiones de Flexión Tensiones de Flexión
M
+
Cinf = C
-
+
+
+
M
-
σ
max
M Cinf
I Ln
σ
max
M Csup
I Ln
TENSIONES NORMALES EN VIGAS
10
σ
+
-
Si el M entonces:
-
max
σ max
M C sup
I Ln
M C inf
I Ln
Ejemplo 1
Sea la viga mostrada en la Fig. Determinar el diagrama de tensiones de flexión máximas
en la sección de máxima solicitación.
q = 2000 k/m
30 cm.
15 cm.
3.00 m.
Solución:
σ
1.00 m.
M max * C
I
Ln
Sección
Viga
(7.3.)
a) Calculo de momento máximo ( Mmaz)
Calculo de reacciones
q = 2000 k/m
RA
RB
3.00 m.
1.00 m.
M
A
0
2000 * 4 * 2 - R B * 3 0
RB = 5333.33 k
V 0 5333.33 2000 * 4 R
RA = 2666.67 k
A
0
TENSIONES NORMALES EN VIGAS
11
Diagramas Q y M
q = 2000 k/m
RA
RB
3.00 m.
1.00 m.
+
+
X
+
Mmax = 1777.74 k-m.
M max 2000 *1* 0.5 M max 1000 k m
R A 2000 * X 0 X 1.34 m.
M max M X 1.34 R A * X 2000 *
1.34 2
M max 1777.74 k m.
2
M max M max , M max
M max M max 1777.74 k m 177774.00 k - cm.
(a)
b) Ubicación de la línea neutra
Por ser sección simétrica coincide con la mitad de la sección ósea:
Ln
h
YG = C = h/2
X
b
C = 15.00 cm.
(b)
TENSIONES NORMALES EN VIGAS
12
c) Inercia en la línea neutra
Como coincide la inercia del baricentro con la inercia de la línea neutra y sabemos de
isostática que para una sección rectangular la inercia del baricentro es:
I GX I Ln
b * h3
12
I Ln 33750.00 cm 4
(c)
d) Diagrama de tensiones de flexión en la sección de máxima solicitación
Remplazando (a), (b), (c) en la expresión 7.3. tenemos:
σ max σ max
M max * C 177774 *15
k
79.01 2
I Ln
33750.00
cm
- = 79.01 k/cm2
σmax
-
Csup= 15 cm.
30 cm.
Ln
Cinf = 15 cm.
+
15 cm.
+ = 79.01 k/cm2
σmax
Diagrama de
Tensiones de Flexión
Sección viga
Rectangular
M
+
Ejemplo 2
Sea la viga mostrada en la Fig. Determinar la carga máxima uniformemente repartida que
es capaz de soportar la sección de viga.
q=?
4a
1.00 m.
4.00 m.
1.00 m.
2a
a 2a a
Sección Viga
TENSIONES NORMALES EN VIGAS
13
Datos
Incógnita
k
cm 2
k
adm
1200
cm 2
a 5.00 cm.
qmax= ?
adm
800
Solución:
σ
M max * C
I
Ln
(7.3.)
Calculo de momentos máximos ( Mmaz)
Calculo de reacciones
q
MA
VA
Art
1m
M
4m
1m
q * 5 * 2.5 VB * 4 0
V 0
VA VB q * 6 0
VA 2.875 q
M
q *1 * 0.5 VA *1 M A 0
der
Art
izq
Art
0
VB
0
VB 3.125 q
M A 2.38 q
TENSIONES NORMALES EN VIGAS
14
Diagramas Q y M
q
MA
VA
Art
VB
1m
2.875 q
4m
1m
1.00 q
+
+
Q
2.125 q
X
2.38 q
0.5 q
-
-
+
M
1.75 q
Determinación de momentos máximos
Calculo de la distancia X donde se produce el momento máximo positivo
2.95q − qx = 0 → x = 2.95 m
+
+
Mx=2.95
= Mmax
= −2.38q + 2.875qx − q
+
Mmax
= 1.75q
−
Mmax
= 2.38q
x2
= 1.75q
2
TENSIONES NORMALES EN VIGAS
15
a) Geometría de las masas
Fig.
b
1
2
h
Ai
2
4
4
2
Sumatorias
Yi
8
8
16
Ai.Yi
4
32
1
8
40
Ig
10,67
2,67
di
1,5
1,5
l ln
28,67
20,67
49,33
1
1
2a
2
a = 5 cm
Cinf=
2,5 a =
Csup=
3,5 a =
4
l LN= 49,33 a =
12,5 cm
17,5 cm
4
30833 cm
a
2a
4a
a
b) Calculo de capacidad de carga (qmáx.)
+
𝜎𝑚𝑎𝑥
−
𝜎𝑚𝑎𝑥
-
+
+
-
+
𝜎𝑚𝑎𝑥
−
𝜎𝑚𝑎𝑥
+
Para Mmax
𝐶𝑠𝑢𝑝
𝐶𝑖𝑛𝑓
LN
−
Para Mmax
Para Mmax (+)
+
σ+
max = σAdm =
+
Mmax
× Cinf 1.75q1 × Cinf
σ+
Adm × ILN
=
→ q1 =
= 11276.07 𝑘 𝑚
ILN
ILN
1.75 × Cinf × 100
+
Mmax
× Csup 1.75q 2 × Csup
σ−
Adm × ILN
=
→ q2 =
= 12081.50 k m
ILN
ILN
1.75 × Csup × 100
Para Mmax (-)
−
σ−
max = σAdm =
σ+
max
σ−
max
=
σ+
Adm
−
Mmax
× Csup 2.38q 2 × Csup
σ+
Adm × ILN
=
=
→ q2 =
= 5922.30 k m
ILN
ILN
2.38 × Csup × 100
=
σ−
Adm
−
Mmax
× Cinf 2.38q 2 × Cinf
σ−
Adm × ILN
=
=
→ q2 =
= 12436.84 k m
ILN
ILN
2.38 × Cinf × 100
q max ≤ q1 , q 2 , q 3 , q 4 → 𝐪𝐦𝐚𝐱 = 𝟓𝟗𝟐𝟐. 𝟑𝟎 𝐤 𝐦
TENSIONES NORMALES EN VIGAS
5.5.
16
Modulo resistente
Otra forma de expresar la ecuación de tensiones maximas debido a flexión es sustituir la
distancia (y) por la C que es la distancia de la sección más alejada midiendo desde la línea
neutra. Obteniendo la tensión máxima de flexión.
σmax =
El cociente
W=
Iln
C
MC
M
M
=
=
ILn
ILn
W
C
se conoce como Modulo Resistente.
Esta ecuación es muy empleada en secciones de viga constante y en especial para vigas
metálicas. Cada fabricante a confeccionado tablas de las secciones que produce (ver tablas
adjuntas) de tal manera que determinado el modulo resistente que depende de la geometría de la
sección y conociendo la tensión peligrosa dada por el fabricante se está en condiciones de elegir
de su oferta de secciones de perfiles el cumpla con la condición de Wcalculo ≤ WTabla
Ejemplo 3
Determinar la sección del perfil metálico necesario para soportar la carga externa mostrada
en la figura.
q = 2000 k/m
6.00 m.
Sección
Viga
Datos
𝜎𝑓 = 1200 𝑘 𝑐𝑚2
n = 1.15
Ocupar perfiles Icha
Serie HN
Serie HN
TENSIONES NORMALES EN VIGAS
17
Solución:
σmax = σAdm =
σf MC
M
M
n × Mmax
=
=
= → WCal =
ILn
n
ILn
W
σf
C
a) Calculo de momento máximo
q
+
𝑀𝑚𝑎𝑥
Mmax =
𝑞𝑙 2
=
8
M
2000 × 6
= 9000 k − m
8
b) Calculo de modulo resistente
σmax = σAdm =
WCal =
σf MC
M
M
n × Mmax
=
=
= → WCal =
ILn
n
ILn
W
σf
C
n × Mmax 1.15 × 900000
=
= 862.5cm3
σf
1200
Entrado a la tabla de perfiles Icha IN para vigas obtenemos los valores, los que deben cumplir:
WCal ≤ WTabla
Existiendo varias posibilidades, las que más se aproximan al modulo resistente calculado, las
detallaremos en la siguiente tabla:
TENSIONES NORMALES EN VIGAS
18
VIGAS SOLDADAS
SERIE IN
Propiedades Para el Diseño
Designación
Dimensiones
Sección total
Area
IN H * peso
cm *
B
kgf/m
e
Eje x-x
Eje y-y
Flexiòn
Sold.
t
A
I
W
i
I
W
i
ia
it
Smin
cm
cm4
cm3
cm
cm
cm
mm
mm
mm
mm
cm2
cm4
cm3
IN 40 *
49,3
200
10
6
62,8
18000
898
16,90 1330 133,0
4,61
5,45
0,500
5
IN 35 *
53,0
200
12
6
67,6
15400
883
15,10 1600 160,0
4,87
5,63
0,686
5
IN 25 *
72,7
200
20
6
92,6
11100
886
10,90 2670 267,0
5,37
6,14
1,600
6
De estos tres resultados elegiremos el de menor peso por ser el más económico, ósea:
IN 40*49.3
5.5.1
Modulo resistente de algunas figuras regulares
a) Sección Rectangular
ILn
C
b × h3
ILn =
12
h
C=
2
𝑏 × ℎ2
𝑊∎ =
6
W=
Ln
h
C
b
X
b) Sección Circular
ILn
C
π × d4
ILn =
64
d
C=
2
𝜋 × 𝑑3
𝑊° =
32
W=
Ln
C
d
X
TENSIONES NORMALES EN VIGAS
19
c) Sección Triangular
ILn
C
b × h3
ILn =
36
2
C= ×h
3
𝑏 × ℎ2
𝑊∆ =
24
W=
C
h
Ln
X
TENSIONES CORTANTES EN VIGAS
1
Unidad N° 6
Tensiones Cortantes en Vigas
6.1. Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes
objetivos trazados para el Estudio de tensiones cortantes en secciones de viga.
• Calcular las Tensiones Cortantes inducidos por la presencia de fuerzas verticales en
cualquier punto de una viga.
•
Dibujar la distribución de tensiones cortantes en cualquier sección transversal de una
viga.
•
Dimensionar cualquier sección de viga transversal capaz de soportar las tensiones
cortantes inducidos por la presencia de fuerzas verticales.
•
Determinar la capacidad de carga que puede resistir cualquier sección transversal de
viga.
6.2.
Introducción
En la anterior unidad estudiamos que cuando las cargas flexionan a la viga, estas en su
interior producen momentos flectores y fuerzas cortantes en la sección trasversal que son los que
mantienen el equilibrio el sistema.
El objetivo principal de esta unidad es establecer la relación que existe entre las fuerzas
verticales que actúa en la sección transversal y la distribución de tensiones cortantantes que se
producen en ella, basándonos en las mismas suposiciones realzadas en la unidad anterior respecto
a los materiales que se compone la viga.
En conclusión. El corte en vigas estudia los esfuerzos internos de corte originados
por la presencia de fuerzas verticales en la sección transversal de viga. A estos esfuerzos
internos de corte se los denomina Tensiones cortantes en vigas.
Ing. Elias Belmonte C.
TENSIONES CORTANTES EN VIGAS
6.3.
2
Formulación
Supongamos una viga simplemente apoyada de sección recta sometida a flexión, donde la
carga externa es cualquiera produciendo momentos flectores y fuerzas verticales en el interior de
la viga de tal forma que pueda equilibrarse el sistema como muestra los diagramas a
continuación:
b
h
dx
M
Sección
viga
L
M
M + dM
+
+
-
Q
FIG 6.3.1.
Lo que queremos encontrar es una relación que nos vincule las fuerzas verticales de corte
que se produce en cualquier sección transversal, con sus respectivas respuesta interna de
tensiones cortantes verticales. Tomemos el mismo elemento diferencial y superficie de estudio
de la viga de la unidad anterior, debido a la existencia de fuerzas verticales es que el diagrama de
momentos flectores no es constante, Produciendo en el elemento un desequilibrio que debe ser
absorbido internamente por fuerzas de corte horizontal, para demostrar cortemos el elemento
diferencia mediante la superficie de estudio y realicemos el equilibrio de fuerzas horizontales
Ing. Elias Belmonte C.
TENSIONES CORTANTES EN VIGAS
3
ESTADO DE CARGA
V
M +dM
M
Ln
h
V+dV
dx
Elemento
diferencial
Superficie
en
estudio
b
Sección
viga
ESTADO TENSIONAL NORMAL
Ln
h
σ+dσ
σ
dx
Elemento
diferencial
C
b
Sección
viga
ESTADO DE EQUILIBRIO
Ln
H1 = ∫ σ * dA
A
Y
dFH
H1
C
H2
H2 = ∫ σ * dA + ∫ dσ * dA
A
A
dFH = τ H * dx * b
b
dx
Ing. Elias Belmonte C.
TENSIONES CORTANTES EN VIGAS
4
b
V
M +dM
M
h
V+dV
dx
Elemento
diferencial
Superficie
en
estudio
dF
H1
Ln
y
τ
σ
dx
Sección
viga
FIG
6.3.2
σ + dσ
Estado
tensional
H1 = ∫ σ * dA
A
H2
H2 = ∫ σ * dA + ∫ dσ * dA
A
Estado de
fuerzas
A
dFH = τ H * dx * b
quedando la ecuación:
τH =
V *Me
b * I Ln
ECUACION DE TENSION CORTANTE
HORIZONTAL EN VIGAS
ECC. 6.1
remplazando tenemos:
6.3.1.
Relación entre la tensión cortante horizontal y vertical
Habrá quien se sorprenda al ver al ver que el termino fuerza cortante vertical (V) aparece
en la ecuación de tensión de corte horizontal τ H . Sin embargo como veremos ahora, una tensión
cortante horizontal va siempre acompañada de otra tensión cortante vertical de la misma
magnitud pero de sentido contrario. Para demostrar ello supongamos un elemento diferencial
cualquiera de la viga donde se representen las tensiones de corte horizontal y vertical y
realicemos el equilibrio respectivo. Ver figura.
Ing. Elias Belmonte C.
TENSIONES CORTANTES EN VIGAS
τH
τH
τV
τV
τH
τ V dy
τV
dx
dz
τH
(b) Tensiones
(a) Elemento diferencial
A
A
dy
dx
∑M
5
τ V dydz
dy
dx
τ H dxdz
(c) Fuerzas
=0
(τ V dydz)dx - (τ H dxdz)dy = 0
Simplificando tenemos:
τH = τV
l.q.q.d.
Por consecuencia la expresión que gobierna las tensiones de corte vertical viene dada por:
τV =
6.4.
V * Me
b * I Ln
ECUACION DE TENSION CORTANTE
VERTICAL EN VIGAS
ECC. 6.2
Construcción del diagrama de tensiones
6.4.1. Secciones simétricas, b = constante
Son aquellas secciones simétricas respecto a la línea neutra que coincide con el centro de
gravedad de la sección, y cuyas tensiones de corte varían siguiendo una ecuación cuadrática en
función de la variación del momento estático, ya que las otras variables de la expresión son
constantes, como veremos a continuación:
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
6
x
h
y
yg
+
τmax
τmax
-
+
Csup= C
Ln
Cinf = C
b
Sección viga
Rectangular
Diagrama de
Tensiones de Corte
+
V
de las expresiones 6.1. y 6.2. tenemos:
τV =
Diagrama de
Tensiones de Corte FIG. 6.4.1
V
V * Me
b * I Ln
donde:
•
Cinf = Csup= C
•
V, b, ILn = Constantes
•
C = Fibra de la sección mas alejada de la Ln.
⎡
⎛h
⎞⎤
⎜ − y⎟⎥
2
⎢
⎡ ⎛h
2
⎞⎤
⎠ ⎥ = b * ⎡⎛ h ⎞ − y 2 ⎤
Me = Variable = A*yg = ⎢b * ⎜ − y ⎟⎥ * ⎢y + ⎝
⎢⎜ ⎟
⎥
2
2 ⎥ 2 ⎢⎣⎝ 2 ⎠
⎢
⎝
⎠
⎣14
⎦
⎦⎥
4244
3 ⎢
⎥
A
⎣144244
3⎦
yg
remplazando
τV =
V
2
* b * ⎡⎛ h ⎞ − y 2 ⎤
⎥
b * I Ln 2 ⎢⎢⎜⎝ 2 ⎟⎠
⎥
123
⎣
1442443⎦
Const.
Variable
como vemos la expresión varia de forma cuadrática, entonces tenemos:
Para y = h/2
τV = 0
Para y = 0
τV = τmax
Lo que da como resultado el diagrama mostrado en el grafico, el signo del diagrama de
tensiones de corte lo define el signo del diagrama de fuerzas cortantes.
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
7
Sabiendo la inercia en la “Ln”, tenemos para la sección rectangular mostrada que el corte
máximo es el siguiente:
I Ln
b * h3
=
12
remplazando tenemos
τV =
2
⎤
V
b ⎡⎛ h ⎞
*
* ⎢⎜ ⎟ − y 2 ⎥
3
bh
2 ⎢⎣⎝ 2 ⎠
⎦⎥
b*
12
simplificando y remplazando y = 0 tenemos: τ max =
3 V
*
2 bh
Tensión de corte
máximo para secciones
rectangulares
3 V
τ max = *
2 A
si A = bh
ECC. 6.3
6.4.2. Secciones simétricas, b = variable
Son aquellas secciones simétricas respecto a la línea neutra que coincide con el centro de
gravedad de la sección, y cuya variación de las tensiones de corte son simétricas respecto a la
“Ln” y ocasionadas por dos factores:
•
Momento estático (Me).- Que es la variable que ocasiona la variación cuadrática del
diagrama.
•
Bases (b).- Que es la variable que ocasiona variaciones bruscas en el diagrama.
Los otros dos factores que intervienen como ser la inercia y la fuerza de corte son
constantes, veamos a continuación dos ejemplos:
1
2
+
Ln
3
4
Sección
Tensiones de corte
τ
V
=
Me
I
b
{
Ln
1
2
3 variable
const.
V
*
Sup
b 2 ⟩ b Inf
2
Sup
b 3 ⟨ b Inf
3
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
8
1
2
τ
V
Ln
+
Me
I
b
{
Ln
1
2
3 variable
const.
V
*
Sup
b 2 ⟨ b Inf
2
3
4
Sección
=
Sup
b 3 ⟩ b Inf
3
Tensiones de corte
Como vemos en los dos ejemplos el diagrama lo define una curva cuadrática debido a la
variación del momento estático, existiendo variaciones bruscas debido al cambio brusco de las
bases de la sección que se presentan en los ejes 2 y 3. Representadas en la figura por rectas
segmentadas (base 2 superior segmentos rojo, base 2 inferior segmento verde).
6.4.2. Secciones asimétricas, b = variable
Son aquellas secciones asimétricas respecto a la línea neutra que coincide con el centro
de gravedad de la sección, y cuya variación de las tensiones de corte son asimétricas respecto a
la “Ln” y ocasionadas por los mismos factores que el inciso anterior. Veamos a continuación dos
ejemplos:
1
+
Ln
2
τ
V
=
Me
I
b
{
Ln
1
2
3 variable
const.
V
*
3
Sección
Tensiones de corte
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
9
1
2
+
Ln
τ
3
4
V
=
Me
I
b
{
Ln
1
2
3 variable
const.
V
*
5
Sección
Tensiones de corte
Como vemos en los dos ejemplos el diagrama lo define una curva cuadrática debido a la
variación del momento estático, la cual crece desde los extremos superior y inferior hacia la línea
neutra , existiendo variaciones bruscas debido al cambio brusco de las distintas bases que se
presentan en la sección .
Ejemplo 1
Sea la viga mostrada en la Fig. Determinar el diagrama de tensiones de corte en la
sección de máxima solicitación, además determinar el cote máximo.
q = 2000 k/m
4.00 cm.
12.00 cm.
3.00 m.
1.00 m.
Sección
Viga
4.00 cm.
8.00 cm.
2.00 cm.
Solución:
a)
τ=
Vmax * M e
I *b
Ln
2.00 cm.
(6.2.)
Calculo de Fuerza vertical máxima ( Vmaz)
• Calculo de reacciones
q = 2000 k/m
RA
3.00 m.
RB
1.00 m.
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
∑M
A
=0 ⇒
10
2000 * 4 * 2 - R B * 3 = 0
RB = 5333.33 k
∑V = 0 ⇒
5333.33 − 2000 * 4 + R A = 0
RA = 2666.67 k
• Diagramas Q
q = 2000 k/m
RA
RB
3.00 m.
1.00 m.
Vmax = 3333.33 k
2666.67 k
(a)
2000.00 k
+
+
-
Vmax
= 3333.33 k.
3333.33 k
b)
Ubicación de la línea neutra
Por ser sección simétrica coincide con la mitad de la sección ósea:
1
h
2
Ln
YG = C = h/2
X
b
C = 10.00 cm.
(b)
TENSIONES CORTANTES EN VIGAS
c)
11
Inercia en la línea neutra
Como coincide el baricentro de las figuras 1 y 2 con la línea neutra tenemos que:
12.00 cm.
20.00 cm.
8.00 cm.
12.00 cm.
Figura 2
Figura 1
I Ln = I1 − I 2 =
b1 h 13 b 2 h 32 12 * 20 3 8 *12 3
−
=
−
12
12
12
12
I Ln = 6848.00 cm 4
d)
Ln
X G1 = X G2
(c)
Diagrama de tensiones de corte en la sección de máxima solicitación
Remplazando (a), (c) en la expresión 7.3. tenemos:
τV =
V
I Ln
{
const.
*
M
Me
e
= 0 . 4868 *
b
b
{
variable
como vemos estamos en el caso de sección simétrica con b = variable. Dibujemos la
sección y en cada cambio de base creemos un eje.
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
12
1
4.00 cm.
-
12.00 cm.
2
τmax=55.5 cm.
3
4
4.00 cm.
8.00 cm.
2.00 cm.
2.00 cm.
Diagrama de
Tensiones de Corte
Sección
Viga
•
Cuadro de calculo
Sección
•
Ln
Const
Me
b
τ
1
2sup
0.4868
0.4868
12.00
12.00
0.00
384.00
0.00
15.58
2inf
Ln
3sup
0.4868
0.4868
0.4868
4.00
4.00
4.00
384.00
456.00
384.00
46.73
55.50
46.73
3inf
4
0.4868
0.4868
12.00
12.00
384.00
0.00
15.58
0.00
Calculo de momentos estáticos
• Sección 1
12.00 cm.
1
M 1e = M e4 = A 1 * y 1 = 0 * y 1
M 1e = 0
y 1 = 10.00 cm.
Ln
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
13
• Sección 2
12.00 cm.
1
4.00 cm.
M e2 = M e3 = A 1− 2 * y 1− 2
2
y 1- 2 = 8.00 cm.
M e2 = (12 * 4) * 8 = 384 cm 3
Ln
• Sección Ln
12.00 cm.
1
2
6.00 cm.
3.00 cm.
2.00 cm.
Ln
M Ln = M e2 + M e2 − Ln = M e2 + A 2 − Ln * y 2 − Ln
M Ln = 384 + (4 * 6) * 3
M Ln = 456 cm 3
2.00 cm.
Ejemplo 2
Sea la viga mostrada en la figura. Determinar para la sección c-c los diagramas de
tensión cortante y tensión normal
q=4000 kg/m
c
P = 4000 kg
4 cm. 4 cm.
6 cm.
5.00 cm
5.00 cm
15.00cm
10 cm
c
Seccion
Ra
0.6m
0.6m
M = 6000 kg-m
0.6m
0.6m
0.6m
Rb
0.6m
Solucion
1. Calculo de solicitaciones en la seccion c -c
1.1. Calculo de reacciones
Ma = 0
qx1.8x0.3 - M + px3.0 - Rbx2.4 = 0
V=0
Ra + Rb - qx1.8 + p = 0
Rb = 3400 kg
Ra = 7800 kg
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
14
1.2. Diagramas M y Q
q=4000 kg/m
c
P = 4000 kg
c
M = 6000 kg-m
Ra = 7800 kg
0.6m
Rb = 3400kg
1.2m
0.6m
0.6m
0.6m
5400 kg
Vc-c = 3000 kg
4000 kg
+
+
Q
600 kg
2400 kg
2760 kg-m
2400 kg-m
720 kg-m
M
+
Mc-c = 1800 kg-m
2880 kg-m
3240 kg-m
Vc-c = -qx1.2 +Ra = 3000 kg
Mc-c = -qx1.2x.6 +Rax0.6 =1800.00 kg-m
2, Ubicación linea neutra
14,00
5
8
11,92
Csup
1
2
3
13,08
Cinf
LN
5
15
4
X
10,00
Seccion
Cinf =
A1Y1 + A2Y2 + A3Y3
A1 + A2 + A3
Cinf =
13,08
cm
Csup=
11,92
cm
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
Areas
F1
F2
F3
h
15,00
5,00
5,00
25,00
b
10,00
8,00
14,00
15
Yi
7,50
17,50
22,50
Ai
Igi di=(Cinf - Yi
Ini
150,00
2812,50
5,58 7477,81
40,00
83,33
-4,42
865,88
70,00
145,83
-9,42 6361,44
260,00
14705,13
3 Calculo de inercia en la linea neutra
2
Steinner Ini = Igi + Aidi
InT = In1 + In2 + In3
Inercia baricentrica del rectangulo
In1 =
7477,81
In2 =
865,88
In3 =
6361,44
Int =
14705,13
Ig = bh3/12
Xg
4. Calculo de Tensiones
σ=
Seccion
c-c
1
2s
2i
3s
3i
Ln
4
Mc-cCi
Int
τ=
Tension normal
Mc-c
Ci
k-m
cm
1800,00
1800,00
1800,00
1800,00
1800,00
1800,00
1800,00
11,92
6,92
6,92
1,92
1,92
0,00
13,08
145.95 k/cm2
Int
4
cm
Vc-c Me
bi Int
Tension cortante
σc-c
V
Me
b
τc-c
k/cm2
k
cm3
cm
k/cm2
-145,95
-84,69
-84,69
-23,52
-23,52
0,00
159,96
14705,13
14715,13
14715,13
14715,13
14715,13
14715,13
14715,13
3000,00
3000,00
3000,00
3000,00
3000,00
3000,00
3000,00
17.05k/cm2
+
0,00
9,61
16,81
21,32
17,05
17,43
0,00
2
9.61k/cm2
16.81k/cm2
14,00
14,00
8,00
8,00
10,00
10,00
10,00
1
0.00 k/cm2
-
0,00
659,62
659,62
836,54
836,54
855,03
0,00
21.32 k/cm
21.32k/cm2
2
3
2
17.43 k/cm LN
17.43k/cm2
+
4
159.96 k/cm2
Tension Normal
seccion c-c
0.00 k/cm2
Tension Cotante
seccion c-c
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
16
Ejemplo 3
Sea la viga mostrada en la figura. Dimensionar la sección de la misma con las máximas
solicitaciones.
P = 6000 k
q = 8000 k/m
Seccion C -C
Rb
Ra
0.60 m
0.60 m
a 2a a 2a a
1.20 m
0.60 m
cm
6a cm.
Seccion C -C
Tensiones Admisibles
σadm = 900 k/cm2
τadm =300 k/cm2
4a cm.
2a cm.
Solución:
(a)
Calculo de solicitaciones máximas
•
∑M
A
Calculo de reacciones
= 0 ⇒ 6000 * 0.6 − 8000 * 1.8 * 2.1 + R b * 2.4 = 0
∑V = 0 ⇒ R
a
− 6000 + 8000 * 1.8 − 11100 = 0
Rb = 11100.00 k
Ra = 2700.00 k
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
•
17
Diagramas Q y M
Vmax= 6300 k
2700 k
+
+
-
-
6300 k
Vmax
1620 k-m
Mmax
3300 k
4800 k
Mmax= 1620 k-m
360 k-m
+
+
1440 k-m
1620 k-m
(b)
Geometría de las masas
a 2a a 2a a
FIG. 1
XG1
6a
9a
4a
2a
FIG. 2
XG2
4a
a
Cinf
XG3
Ln
FIG. 3
X
Aid2
i
FIGURA
bi
hi
Ai
Yi
Ai*Yi
IGi
1
2
3
1.00
3.00
7.00
6.00
4.00
2.00
6.00
12.00
14.00
9.00
4.00
1.00
54.00
48.00
14.00
18.00
16.00
4.67
173.34
1.69
96.47
12.00
32.00
116.00
38.67
271.50
∑
Cinf =
3.63 a
Csup=
8.38 a
4
ILn = 310.17 a
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
a 2a a 2a a
18
σmax
1
-
6a
Csup = C
+
τmax
2
Ln
4a
(c)
Dimensionamiento
(c1)
Por Flexión
σ max = σ adm =
aσ = 3
(c2)
τ max
3
4
+
2a
M max * C M max * 8.38a
M * 8.38
=
⇒ a σ = 3 max
4
I Ln
310 * σ adm
310a
162000 * 8.38
⇒ a σ = 1.69 cm.
310 * 900
Por Corte
Vmax * M e,2 Vmax * ((a * 6a) * (8.38a − 3a) )
= τ adm =
=
⇒ aτ =
I Ln * b 2
310a 4 * a
aτ =
Cin
Vmax * 32.28
310 * τ adm
6300 * 32.28
⇒ a τ = 1.48 cm.
310 * 300
Se escoge el mayor valor de “a” de tal forma que la sección sea capaz de soportar los dos
esfuerzos, ósea a ≥ aσ , a τ ⇒
1.7
1.7
3.4
a = 1.69 cm. ≈ 1.70 cm.
1.7 cm.
3.4 cm.
10.2 cm.
SECCIÓN VIGA
6.8 cm.
3.4 cm.
Ing. Elías Belmonte C.
TENSIONES CORTANTES EN VIGAS
19
Ejemplo 4
Sea la viga mostrada en la figura. Determinar la Pmax capaz de soportar la sección
3P
P
Ra
0.60 m
2 4
2
0.6 m
0.60 m
4
2
2P
Rb
0.6 m
Seccion C -C
0.60 m
cm
8 cm.
4 cm.
Seccion C -C
Tensiones Admisibles
σadm = 900 k/cm2
τadm =300 k/cm2
12 cm.
Ing. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
1
Unidad N° 7
VIGAS COMPUESTAS O REFORZADAS
7.1. Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes
objetivos trazados para el Estudio de tensiones en secciones de viga compuesta por distintos
materiales.
1. Efectuar el análisis tensional en la sección transversal de viga compuesta, identificando
las tensiones normales y cortantes que se producen en los distintos materiales
(Diagramas Tensiónales).
2. Aprender a transformar la sección transversal real compuesta por distintos materiales
en una sección equivalente compuesta de un solo material.
3. Determinar momentos máximos y corte máximo que es capaz de resistir la sección
trasversal.
7.2.
Introducción
Las vigas cuya sección transversal esta construida por dos o más materiales diferentes se
la denomina Vigas compuestas o Reforzadas. Su importancia de estas secciones es que varios
de los materiales de construcción soportan distintas tensiones de compresión y de tracción, entre
estos materiales figura el hormigón, la madera, algunos metales y plásticos. Además de que como
ingenieros se busca optimizar las cualidades de los materiales. El caso más conocido es el del
Hormigón armado, que las debilidades que tiene el hormigón para absorber tensiones de tracción
se busca que sean absorbidas por el acero.
La teoría de la flexión estudiada no se puede aplicar directamente a las vigas de secciones
compuestas, ya que se habrán dado cuenta estas se basan en las Hipótesis de continuidad,
homogeneidad, isotropía y en especial la Hipótesis de bernoulli que define que las secciones
planas deben permanecer planas después del proceso de la deformación, es decir que las
deformaciones deben ser proporcionales a la distancia a la línea neutra. Lo cual no cumple las
secciones de viga compuesta.
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
2
La metodología que se va a seguir para el estudio de vigas compuestas es la
transformación de la sección compuesta de distintos materiales en una sección equivalente
homogénea de un solo material a la que se aplique directamente las ecuaciones que gobiernan la
flexión. Para poder cumplir con las hipótesis antes mencionadas debemos basarnos en dos
principios fundamentales de transformación:
1er Principio.- Las deformaciones de los materiales que componen la sección compuesta
debe ser la misma
2do Principio.- La capacidad de carga de los materiales que componen la sección
compuesta debe ser la misma
7.3.
Formulación
Supongamos una viga de sección compuesta de dos materiales, madera y acero firmemente
asegurados de forma que no pueda haber deslizamiento entre ambos materiales, como muestra la
figura 7.3.1.
Madera
h
h1
FIG. 7.3.1
Sección Real de
Madera y Acero
Acero
b
Lo que se quiere lograr es transformar la sección compuesta en una sección homogénea
equivalente donde se cumpla las hipótesis de resistencia de materiales y se puedan aplicar
directamente las formulas de flexión. Para lograr este objetivo aplicaremos a la sección los dos
principios:
1er Principio.- Deformaciones iguales.
εm = εa
(7.3.1)
εm = Deformación unitaria Madera
εa = Deformación unitaria Acero
Sabemos de las unidades 1 y 2 que:
ε=
ΔL
L
(a)
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
σ=
N
A
ΔL =
3
(b)
N*L
E*A
(c)
remplazando la expresión (b) en (c) tenemos:
ΔL =
σ*L
E
(d)
remplazando la expresión (d) en (a) tenemos:
ε=
ΔL σ * L
=
L E*L
=
ε
σ
E
(e)
remplazando la expresión (e) en (7.3.1) tenemos:
σm σa
=
Em Ea
n
=
E
E
Ea
σm
Em
σa =
a
(7.3.2.)
m
σ a = nσ m
(7.3.3.)
2do Principio.- Capacidad de cargas iguales.
Nm = Na
(7.3.4.)
Na = Capacidad de Carga Acero
Nm = Capacidad de Carga Madera
sabemos de la unidad 1 que:
N = A*σ
(f)
remplazando en 7.3.4. tenemos:
Am*σm = Aa*σa
(g)
por ultimo remplazando 7.3.3 en (g) tenemos:
Am*σm = Aa*(n*σm)
Am = n* Aa
(7.3.5.)
que es la ecuación que gobierna las transformaciones de secciones reales compuestas a secciones
equivalentes homogéneas. La cual significa que para convertir un área real de acero en un
área equivalente de madera es necesario multiplicar esta área en “n” veces. Cuyo valor “n”
esta en función de la relación de módulos de elasticidad que existen, ver expresión 7.3.2.
aplicando esta expresión a la sección de la Fig. 7.3.1. tenemos:
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
•
4
Transformación a sección Equivalente Madera
Am = n* Aa
Am = n*(b*h1)
Considerando h1 constante podemos escribir la expresión de la siguiente manera:
Am = h1*(n*b)
Lo que transforma a la sección como muestra la Fig. 7.3.2.
Madera
h
FIG. 7..3.2.
h1
Acero
b
nb
Sección Equivalente
de Madera
Sección Real
de Madera y Acero
•
Transformación a sección Equivalente Acero
Am = n* Aa
Aa =
1
1
Am ⇒ Aa = (h * b)
n
n
Considerando h constante podemos escribir la expresión de la siguiente manera:
⎛b⎞
Aa = h * ⎜ ⎟
⎝n⎠
Lo que transforma a la sección como muestra la Fig. 7.3.3.
b/n
Madera
h
h1
b
Acero
Sección Equivalente
de Acero
Sección Real
de Madera y Acero
FIG. 7.3.3.
Para el caso que se analice tensiones de corte debido a flexión el procedimiento es el
mismo lo único que varía en las expresiones son las tensiones de corte que remplazan a las
tensiones normales quedando las expresiones de la siguiente manera:
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
n
=
E
E
a
(7.3.2.a)
m
τ a = nτ m
(7.3.3.a)
Am = n* Aa
7.4.
5
(7.3.5.a)
Transformación en secciones equivalentes
La transformación de secciones reales compuestas por distintos materiales en secciones
equivalentes de un mismo material (homogéneas), se lo realiza siguiendo la expresión 7.3.5 y el
procedimiento del anterior inciso, se simplifica partiendo del conocimiento de que todas las
ecuaciones de flexión como las estudiadas en este unidad están referidas a la línea neutra por lo
cual las alturas deben ser constantes y no pueden variar en dimensión. Por consiguiente las únicas
dimensiones que pueden variar son las bases (bi) de los distintos materiales que componen la
sección. Existiendo varios casos que plantearemos a continuación como queda la expresión 7.3.5.
7.4.1 Sección compuesta por dos materiales
Este es el caso que desarrollamos la expresión 7.3.5. De forma simplificada haciendo
solamente la transformación de las bases queda
b = nb
e
i
E
n = r
Ee
r
i
b ie = base (i) equivalente
b ir = base (i) real
(7.3.6.)
Er = Modulo de elasticidad real
Ee = Modulo de elasticidad equivalente
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
6
7.4.2 Sección compuesta por “n” materiales colocados
de forma horizontal
En este caso existen varios factores “n” de transformación, tantos como materiales que esta
compuesta la sección quedado la expresión 7.3.5. de la siguiente manera.
b ie = n i b ir
(7.3.7.)
E ir
ni = e
Ei
Ejemplo 1
Sea la sección de viga mostrada en la compuesta de tres materiales como muestra
la Fig. transformar la sección a una sección equivalente de Madera.
8.00 cm.
Latón
16.00
Madera
2.00 cm.
Acero
4.00 cm.
3.00 cm.
DATOS
EL = 1*106 k/cm2
Em = 1*105 k/cm2
Ea = 2*106 k/cm2
3.00 cm.
Solución:
a)
b)
Factores de transformación
n1 =
EL
= 10
Em
Factor de latón a madera
n2 =
Em
=1
Em
Factor de madera a madera
n3 =
Ea
= 20
Em
Factor de acero a madera
Transformación
• Latón a Madera
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
7
b1m = n1 * b1L = 10*10 = 100 cm.
•
Madera a Madera
b m2 = n 2 * b m2 = 1*10 = 10 cm.
•
Acero a Madera
b 3m = n 3 * b 3a = 20*4 = 80 cm.
c)
Sección equivalente Madera
100.00 cm.
8.00 cm.
10.00 cm.
16.00
2.00 cm.
4.00 cm.
3.00 cm.
80.00 cm.
3.00 cm.
Sección Equivalente
de Madera
Sección Real
Esta misma sección se puede transformar a cualquier otro material con tan solo tomar
como base en el cálculo del factor de transformación el modulo de elasticidad del material que se
desee convertir la sección y seguir el mismo procedimiento para el calculo de las nuevas bases.
7.4.3 Sección compuesta por “n” materiales colocados
de forma Vertical
En este caso no podemos emplear directamente las expresiones 7.3.7. ya que al cortar la
sección transversal compuesta nos encontramos con mas de una clase de materiales. Para dar
solución a este caso y siguiendo el concepto de la ecuación 7.3.5. es que se utilizan las siguientes
expresiones.
b ie =
∑nb
i
r
i
(7.3.7.)
ni =
E
E
r
i
e
i
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
8
Ejemplo 2
Sea la sección de viga mostrada en la compuesta de tres materiales como muestra
la Fig. transformar la sección a una sección equivalente de Bronce.
1
1
18 cm.
2
2
6 cm.
6 cm.
4 cm.
6 cm.
Latón
Bronce
Acero
DATOS
EL = 1*106 k/cm2
Eb = 2.5*105 k/cm2
Ea = 2*106 k/cm2
Solución:
d)
e)
Factores de transformación
n1 =
EL
=4
Eb
Factor de latón a bronce
n2 =
Eb
=1
Eb
Factor de bronce a bronce
n3 =
Ea
=8
Eb
Factor de acero a bronce
Transformación
• Sección 1 – 1 (latón + bronce)
b1b = n 1 * b1L + n 2 b1b = 4*6 + 1*6 = 30 cm.
•
Sección 2 – 2 (latón + acero + bronce)
b1b = n 1 * b1L + n 3 b1a + n2 b1b = 4*6 + 8*4 + 1*6 = 62 cm.
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
f)
9
Sección equivalente Madera
30 cm.
18 cm.
6 cm.
6 cm.
4 cm.
6 cm.
62 cm.
Sección Equivalente
de Bronce
Sección Real
7.5.
Determinación de tensiones reales
y capacidad carga
El procedimiento que se sigue es el mencionado en la parte introductiva de este unidad. El
cual de tallaremos a continuación:
•
Paso 1: Transformación de la sección compuesta de varios materiales a una sección
equivalente de un solo material.
•
Paso 2: Mediante las ecuaciones que conocemos de flexión determinamos las
tensiones normales y cortantes equivalentes para la sección equivalente.
•
Paso 3: Una vez conocidas las tensiones equivalentes, mediante la expresión (7.3.3) y
(7.3.3.a) las transformamos en tensiones reales para cada material
σ ir = n i σ ie
Ecc. de transformación para
las tensiones normales
( 7.5.1. )
τ ir = n i τ ie
Ecc. de transformación para
las tensiones cortantes
( 7.5.2. )
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
10
Siguiendo el mismo procedimiento se calcula las capacidades de carga ya sea de
momentos, como de fuerzas verticales. Una vez obtenido los valores máximos para cada material,
se compara los valores y el menor será la capacidad que puede resistir tanto a momento, como a
fuerza vertical la sección compuesta antes de romperse.
Ejemplo 3
Sea la viga cuya sección esta compuesta por dos materiales acero y aluminio como
muestra la Fig. Determinar con las máximas solicitaciones lo siguiente:
•
Diagrama de Tensiones normales
•
Diagrama de tensiones cortantes
•
Tensiones máximas
q=4000 kg/m
P = 4000 kg
5.00 cm
5.00 cm
1cm
Aluminio
Acero
Aluminio
15.00cm
5
4 5 cm
Seccion
Ra
0.6m
0.6m
M = 6000 kg-m
0.6m
0.6m
0.6m
Rb
0.6m
Real
Modulos de Elasticidad
Eal =
5.0 E5 k/cm2
Eac = 2.0 E6 k/cm2
Solucion
1. Calculo de maximas solicitaciones
1.1. Calculo de reacciones
∑Ma
?Ma == 00
qx1.8x0.3 - M + px3.0 - Rbx2.4 = 0
Rb = 3400 kg
?V==00
∑V
Ra + Rb - qx1.8 - p = 0
Ra = 7800 kg
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
11
1.2. Diagramas M y Q
q=4000 kg/m
P = 4000 kg
M = 6000 kg-m
Ra = 7800 kg
0.6m
A
Rb = 3400kg
1.2m
0.6m
B
C
0.6m
D
0.6m
E
F
5400 kg
4000 kg
Vmax = 5400 kg.
+
+
Q
5400
M
3240
600 kg
2400 kg
2760 kg-m
2400 kg-m
720 kg-m
+
Mmax = 3240 kg-m.
2880 kg-m
3240 kg-m
1.2.1 Corte
QA = 0
Q isq
B = −4000 * 0.6 = 2400kg
Q der
B = −4000 * 0.6 + 7800 = 5400kg
Q C = −4000 * 0.6 + 7800 - 4000 *1.2 = 600kg
Q F = +4000kg
Q der
E = +4000kg
Q isq
E = +4000 - 3400 = 600k
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
12
1.2.2. Momento
MA = 0
0.6
= −2400kg − m
2
1.8
M C = −4000 *1.8 *
+ 7800 *1.2 = 2880kg − m
2
MF = 0
M B = −4000 * 0.6 *
M E = −4000 * 0.6 = −2400kg − m
M der
D = −4000 *1.2 + 3400 * 0.6 = −2760kg − m
M isq
D = −4000 *1.2 + 3400 * 0.6 + 6000 = 3240kg − m
2. Transformacion de la seccion real en seccion equivalente
n1= Eal / Eal = 1.00
n2 = Eac/Eal =
4.00
be = nixbr Ecc. de Transfornacion a seccion equivalente
bases
n 1 b1
Aluminio
1cm Acero
5.00 cm
5.00 cm
14.00
5
be = nixbr
n 2 b3
8
15.00cm
11.92
Csup
1
2
3
13.08
Cinf
LN
5
15
4
Aluminio
5
n 1 b4
4 5 cm
Seccion
Real
X
10.00
Seccion equivalente
Aluminio
3. Ubicación linea neutra en Seccion Equivalente
Cinf =
A1Y1 + A2Y2 + A3Y3
A1 + A2 + A3
Cinf =
Csup=
Areas
F1
F2
F3
13.08
cm
11.92
cm
h
15.00
5.00
5.00
25.00
b
10.00
8.00
14.00
Yi
7.50
17.50
22.50
Ai
150.00
40.00
70.00
260.00
Igi
2812.50
83.33
145.83
di=(Cinf - Yi)
5.58
-4.42
-9.42
Ini
7477.81
865.88
6361.44
14705.13
4. Calculo de inercia en la linea neutra en la seccion Eqquivalente
InT = In1 + In2 + In3
Steiner
Ini = Igi + Aidi2
Inercia baricentrica del rectangulo
In1 =
7477.81
In2 =
865.88
In3 =
6361.44
Int =
14705.13
Ig = bh3/12
Xg
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
13
5. Calculo de Tensiones normales en la seccion c - c
σe =
Mc-cCi
Int
Tension normal equivalente
σr = ni σe
Tension normal real
Mmax
Seccion Materiales
c-c
Reales
1
2s
2i
3s
3i
Ln
4
Aluminio
Aluminio
Acero
Acero
Aluminio
Aluminio
Aluminio
Ci
k-m
cm
cm
3240.00
3240.00
3240.00
3240.00
3240.00
3240.00
3240.00
σe
Int
11.92
6.92
6.92
1.92
1.92
0.00
13.08
4
k/cm
14705.13
14715.13
14715.13
14715.13
14715.13
14715.13
14715.13
σr
ni
2
k/cm
-262.70
-152.43
-152.43
-42.34
-42.34
0.00
287.93
2
-262.70
-152.43
-609.73
-169.37
-42.34
0.00
287.93
1.00
1.00
4.00
4.00
1.00
1.00
1.00
5.1. Diagramas de Tensiones Nomales
1
-262.70 k/cm2
-262.70 k/cm2
-
-
+
2
-152.43 k/cm2
-609.73 k/cm2
-169.37 k/cm2
-42.34 k/cm2
0.00 k/cm2
3
LN
+
4
287.93 k/cm2
-287.93 k/cm2
Diagrama de Tension Normal
Equivalente para la
seccion c-c
Diagrama de Tension Normal
Real para la
seccion c-c
6. Calculo de Tensiones de Corte en la seccion c - c
τe =
τr =
Vc-c Me
bi Int
ni τe
Tension cortante equivalente
Tension cortante real
Vmax
Seccion Materiales
c-c
Reales
1
2s
2i
3s
3i
Ln
4
Aluminio
Aluminio
Acero
Acero
Aluminio
Aluminio
Aluminio
Me
cm
k
5400.00
5400.00
5400.00
5400.00
5400.00
5400.00
5400.00
Int
3
cm
0.00
659.62
659.62
836.54
836.54
855.03
0.00
τe
be
4
cm
14705.13
14715.13
14715.13
14715.13
14715.13
14715.13
14715.13
2
ni
k/cm
14.00
14.00
8
8
10
10
10
2
τr
2
k/cm
0.00
17.29
30.26
38.37
30.70
31.38
0.00
1.00
1.00
4.00
4.00
1.00
1.00
1.00
0.00
17.29
121.03
153.49
30.70
31.38
0.00
6.1. Diagramas de Tensiones de Corte en la seccion c - c
0.00 k/cm2
17.29 k/cm2
30.26k/cm2
30.70k/cm2
1
0.00 k/cm2
17.29 k/cm2
38.37k/cm2
30.70 k/cm2
0.00 k/cm2
Diagrama de Tension Cotante
Equivalente para la
2
3
31.38 k/cm2
31.38k/cm2
+
121.03 k/cm2
153.49 k/cm2
LN
+
0.00 k/cm2
4
Diagrama de Tension Cortante
Real para la
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
14
7. Tensiones M axim as
7.1. Tensiones m axim as norm ales
acero
max = -609.73 k /cm 2
σ
alum inio
= -287.93
m ax
σ
k /cm 2
7.1. Tensiones m axim as cortantes
acero
= 153.49 k /cm 2
max
τ
τ
aluminio
= 31.38 k /cm 2
max
• Ejemplo 4
Se la sección de viga compuesta mostrada en la Fig. Determinar el momento flexor
máximo y la fuerza de corte máxima capaz de soportar:
Bronce
18 cm.
Acero
3 cm.
6 cm.
3
6
3 cm.
Datos
a
σadm = 1200 k/cm2
b
= 300 k/cm2
σadm
a
= 400 k/cm2
τadm
b
= 100 k/cm2
τadm
Eb = 2.5*105 k/cm2
Ea = 2*106 k/cm2
Solución:
1. Transformación en sección equivalente
n1 =
Eb
=1
Eb
n2 =
Ea
=4
Eb
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
15
Bases
Equivalentes
18 cm.
3
6
Acero
6 cm.
Bronce
1
n1*b1 Csup
Bronce
3 cm.
12
be = ni*br
Ln
n2*b3
n1*b4
2
3
24
Cinf
4 (X)
12
3 cm.
Sección equivalente
de bronce
Sección real
2. Calculo de ubicación y de inercia en Ln de la sección equivalente
FIGURA
1
2
3
h
b
18
3
6
27
A
216
72
72
360
12
24
12
Yi
18
7,5
3
2
Ig
A*Yi
3888
540
216
4644
5832
54
216
6102
Ai*di
5618,16
2099,52
7056,72
14774,4
Cinf = 12,9 cm.
Csup = 14,1 cm.
Iln=
20876,40 cm4.
3. Calculo de momento máximo
σ max ≤ σ adm
Se parte del cocimiento que tenemos de que:
3.1 Diagrama de tensiones normales
b
σmax
Bronce
18 cm.
3 cm.
Bronce
6 cm.
Bronce
6
12
6 cm.
σr = ni*σe
+
Bronce
Acero
Bronce
Diagrama de tensiones normales
Equivalentes
-
Csup= 14.1cm.
Ln
a
σmax
+
Cinf = 12.9cm.
Diagrama de tensiones normales
Reales
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
16
Como vemos en el diagrama de tensiones normales, las tensiones máximas quedaran
ubicadas siempre en las fibras mas alejadas de cada material de la Ln. Por consiguiente serán
las tensiones que producirán los momentos máximos para los distintos materiales como veremos
a continuación:
3.2.
Momento máximo que es capaz de soportar el acero
σ amax ≤ σ aadm
σ
a
max
M amax * C amax
σ aadm * I Ln
a
a
= n 2 * σe = n 2 *
= σ adm ⇒ M max =
I Ln
n 2 * C amax
M amax =
3.3.
1200 * 20876.40
= 907669.57 k - cm = 9076.70 k - m
4 * 6 .9
Momento máximo que es capaz de soportar el bronce
b
σ bmax ≤ σ adm
σ bmax = n 1 * σ e = n 1 *
M bmax =
3.4.
M bmax * C bmax
σb * I
b
= σ adm
⇒ M bmax = adm b Ln
I Ln
n 1 * C max
300 * 20876 .4
= 444178.72 k - cm = 4441.79 k - m
1 * 14 .1
Momento máximo que es capaz de soportar la sección de viga
Se elige el menor valor entre los momentos máximos que son capaces de soportar el acero
y el bronce, este es debido a que es el máximo valor donde los materiales en conjunto son
capaces de resistir de forma conjunta sin fallar ninguno de ellos.
M max ≤ M amax , M bmax
Mmax = 4441.79 k-m
4. Calculo de fuerza vertical máxima
Se parte del cocimiento que tenemos que:
τ max ≤ τ adm
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
17
4.1. Diagrama de tensiones cortantes
Bronce
18 cm.
+
3 cm.
Bronce
6 cm.
Bronce
6
12
6 cm.
τr = ni*τe
Bronce
Acero
Bronce
Diagrama de tensiones cortantes
Equivalentes
+
b
τmax
Csup= 14.1cm.
Ln
a
τmax
Cinf = 12.9cm.
Diagrama de tensiones cortantes
Reales
Como vemos en el diagrama de tensiones cortantes, las tensiones máximas quedan
ubicadas en las fibras más próximas de cada material a la Ln. Esta regla no es general hay
que estar pendientes de las variaciones de tensiones que pueden producir las bases.
Por
consiguiente para este caso es mejor analizar el diagrama de tensiones que nos indicara donde se
producirán las tensiones cortantes máximas para los distintos materiales como veremos a
continuación:
4.2.
Fuerza vertical máxima que es capaz de soportar el acero
τ amax ≤ τ aadm
τ amax = n 2 * τ e = n 2 *
a
Vmax
* M ea
τ aadm * I Ln * b ae
a
a
=
⇒
=
τ
V
adm
max
I Ln * b ae
n 1 * M ea
M ea = M eLn = (12 * 6) * 9.9 + ( 24 * 3) * 5.4 = 1101 .6 cm 3
a
Vmax
=
4.3.
400 * 20876 .4 * 24
= 45482.35 k
4 * 1101 .6
Fuerza vertical máxima que es capaz de soportar el bronce
b
τ bmax ≤ τ adm
τ
b
max
b
b
Vmax
* M eb
τ adm
* I Ln * b eb
b
b
= n1 * τ e = n1 *
= τ adm ⇒ Vmax =
n 1 * M eb
I Ln * b eb
M eb = M eLn = (12 * 14.1) * 14.1/2 = 1192.86cm
b
Vmax
=
3
100 * 20876 .4 * 12
= 21001.36 k
1 * 1192 .86
Ing. G. Elías Belmonte C.
VIGAS COMPUESTAS O REFORZADAS
4.4
18
Fuerza vertical máxima que es capaz de soportar la sección de viga
Con el mismo principio que para momentos se elige la fuerza vertical menor entre los
máximos de cada material ósea:
a
b
Vmax ≤ Vmax
, Vmax
Vmax = 21001.36 k-m
Ing. G. Elías Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
1
Unidad N° 8
ESTUDIO BIDIMENSIONAL DE TENSIONES EN
PLANOS OBLICUOS
8.1.
Objetivos
Al terminar el estudio de esta unidad usted deberá ser capaz de resolver los siguientes
objetivos trazados para el Estudio bidimensional de tensiones en planos oblicuos.
1. Determinar analíticamente las tensiones normales y cortantes que actúan en las caras de
un elemento diferencial orientado a un ángulo cualquiera ( Plano oblicuo) respecto al
eje de referencia x, aprender a dibujar dicho elemento diferencial.
2. Obtener los valores de tensiones de las tensiones Principales ( tensiones máximas y
mínimas normales), la ubicación del plano donde ocurren el estado tensional respecto
al eje de referencia x, aprender a dibujar dicho elemento diferencial.
3. Obtener valores de tensiones de corte máximo y mínimo, sus respectivas tensiones
normales, además el plano de ubicación donde ocurre el estado tensional respecto a un
eje de referencia x, aprender a dibujar dicho elemento diferencial
4. Aprender un método grafico – numérico (Circulo de Mohr) que de solución a lo
planteado anteriormente en los objetivos 1, 2, 3.
5. Aprender a resolver problemas prácticos los distintos estados tensiónales para
cualquier elemento diferencial en estructuras sometidas a esfuerzos unidimensionales y
bidimensionales.
8.2.
Introducción
Si analizamos las unidades estudiadas anteriormente referido a los distintos estados
tensiónales que hemos venido calculando tanto en elementos sometidos a esfuerzos normales y
cortantes simple, como esfuerzos ocasionados por la torsión y la flexión nos damos cuenta que
siempre han estado referidos al eje principal de los elementos o un plano normal o paralelo a este
eje, en esta unidad lo que pretendemos es analizar los estados tensiónales que no necesariamente
Ing. G. Elías Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
2
sus planos sean paralelos o normales a los elementos, ya que al cambiar la orientación del plano,
en este se darán nuevos valores tensiónales que nos interesa conocerlos y analizarlos de tal
manera de saber en que plano y que valores dan las tensiones máximas normales y cortantes, de
tal forma de ser mas eficientes el momento de diseñar cualquier sección de un elemento
estructural, por ejemplo veamos la viga de la Fig. 8.1, una vez conocido el estado tensional del
elemento diferencial “ A “ respecto a los ejes ortogonales x, y que sabemos calcular, lo que se
desea es encontrar es el estado tensional para los planos n, t girados en un ángulo φx-n.
Y
n
X
t
para lograr este objetivo debemos deducir las ecuaciones de transformación que gobiernen las
tensiones normales y de corte para cualquier plano oblicuo.
8.3.
Solución numérica
Formulación de las ecuaciones
Sea la viga pared sometida a fuerzas externas como muestra la Fig. 8.2, consideremos un
un elemento diferencial cualquiera de la viga pared, donde conocemos sus esfuerzos respecto a
los ejes x, y como muestra la Fig.8.3. El objetivo de este análisis es conseguir las ecuaciones de
transformación que nos determinen los estados de esfuerzos respecto a los planos ortogonales n, t
Ing. G. Elías Belmonte C.
3
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
n
Y
σy
Y
φx-n
X
σx
Elemento
Diferencial
σx
τxy
τyx
σy
φ
Fig.8.3
Elemento diferencial mostrando
el Estado Tensional respecto a los
planos (x, y)
Fig.8.2
Viga Pared mostrando él
Elemento diferencial
X
t
Cortando el elemento diferencial por medio del plano t –t como muestra la Fig.8.4 vemos
que automáticamente para mantener el equilibrio estático se generan tensiones respecto a los
planos n, t
Y
n
σx
τxy
φxn
σn
φxn
X
τnt
σy
τyx
t
Fig.8.4
Elemento diferencial mostrando
el estado tensional respecto a
los planos (n, t)
Ing. G. Elías Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
4
Estableciendo ecuaciones de equilibrio de fuerzas en las direcciones de los ejes (n, t)
obtenemos:
∑ Fn
= 0
σn (dA) – σx (dA)Cos (φxn)Cos (φxn) - σy (dA)Sen (φxn)Sen (φxn)
+ τxy (dA) Cos (φxn) Sen (φxn) + τyx (dA) Sen (φxn) Cos (φxn) = 0
simplificando y despejando σn tenemos:
σn =σx Cos2(φxn) + σy Sen2(φxn)– τxy Cos (φxn)Sen (φxn)– τyx Sen (φxn)Cos (φxn) (8.1)
∑ Ft
= 0
τnt (dA) - σx (dA)Cos (φxn)Sen(φxn) + σy (dA) Sen (φxn)Cos (φxn)
- τxy (dA) Cos (φxn) Cos (φxn) + τyx (dA) Sen (φxn) Sen (φxn) = 0
simplificando y despejando tenemos:
τnt = σxCos(φxn)Sen(φxn) - σySen(φxn)Cos (φxn) - τxyCos2(φxn) - τyx Sen2(φxn)
(8.2)
recordando de la unidad N° 6 la ecuación del equilibrio rotacional
IτxyI = IτyxI
Las siguientes Identidades Trigonometrícas
Sen2(φxn) =
1 – Cos (2φxn)
2
Cos2(φxn) = 1 – Cos (2φxn)
2
2Sen (φxn) Cos (φxn) = Sen (2φxn)
Ing. G. Elías Belmonte C.
5
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
y remplazando en las en las ecuaciones (8.1) y (8.2) se transforman en:
σn =
σx + σy
τnt =
σx - σy Sen(2φxn) + τxy Cos (2φxn)
2
2
+
σx - σy Cos (2φxn) - τxy Sen (2φxn)
2
8.3
que son las ecuaciones que gobiernan los distintos estados tensiónales cuya normal forma un
ángulo (φ ) con respecto al eje de referencia.
Auque es posible obtener los valores máximos de los esfuerzos normales y cortantes, así
como la orientación de los planos donde actúan derivando y igualando cero las ecuaciones (8.3),
es más sencillo obtener estas expresiones a partir de un método grafico – numérico conocido
como el nombre de circulo de Mohr
8.4 Solución grafico – numérica
8.4.1 Circulo de Mohr - Formulación
Este método consiste en poder obtener los valores de esfuerzos normales y cortantes
para cualquier plano oblicuo de forma grafica, para ello nos valemos de un artificio
extremadamente útil, conocido como él circulo de Mohr para esfuerzos. Se llama así en honor del
ingeniero alemán Otto Mohr (1835 – 1918) quien lo invento en 1882.
Partiendo de las expresiones (8.3) es fácil demostrar que son ecuaciones parametricas de
un circulo. Para facilitar esta demostración hagamos:
σx + σy
2
σ -σ
D= x y
2
C=
quedando las ecuaciones (8.3) de la siguiente forma:
σn = C + D Cos (2φxn) - τxy Sen (2φxn)
(8.4)
τnt = D Sen (2φxn) + τxy Cos (2φxn)
(8.5)
Ing. G. Elías Belmonte C.
6
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
pasando él termino C al lado izquierdo y elevando al cuadrado las expresiones (8.4) y (8.5)
obtenemos:
(σn – C)2 = (D Cos (2φxn) - τxy Sen (2φxn) )2
(τnt )2
= (D Sen (2φxn) + τxy Cos (2φxn) )2
resolviendo los cuadrados de los segundos términos y sumando las dos expresiones tenemos:
(σn – C)2 = D2Cos2 (2φxn) - 2 D Cos (2φxn) τxy Sen (2φxn) + τxy2 Sen2 (2φxn)
(τnt - 0 )2 = D2Sen2 (2φxn) + 2 D Sen (2φxn) τxy Cos (2φxn) + τxy2 Cos2 (2φxn)
+
(σn – C)2 + (τnt - 0 )2 = D2(Cos2 (2φxn)+Sen2 (2φxn)) +τxy2 (Sen2 (2φxn)+ Cos2 (2φxn))
aplicando la identidad trigonométrica siguiente:
Sen2 (θ) + Cos2 (θ) = 1
obtenemos:
(σn – C)2 + (τnt - 0 )2 = D2 + τxy2
(8.6)
la cual corresponde a la ecuación de un circulo referido a ejes σn
y
τnt, cuyo:
Centro: (C, 0) = ( σx + σy, 0)
2
Radio: R =
D2 + τxy2 =
τ
σx - σy
2
2
+ τxy2
σx - σy
2
2
+
τxy2
τxy
σ
σx + σy
2
σx - σy
2
Ing. G. Elías Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
7
8.4.2 Forma practica de construcción del circulo de
Mohr
Sea el elemento diferencial sometido a esfuerzos normales y cortantes conocidos
respecto a los ejes (X, Y) como muestra la Fig. 8.5
Y
DATOS
σy
τyx
σx
σy
τxy
σx
σx
τxy
X
τxy
σy
τyx
τyx
Lo que se pretende es presentar una forma practica de construcción del circulo para ello tenemos
primeramente que ponernos de acuerdo en la simbología que se va utilizar y los pasos a seguir
para la construcción del mismo.
a) Simbología
Tensiones normales
Tracción ( +)
Salen las tensiones perpendicularmente a las caras del
elemento diferencial, ejemplo:
σy
σx
σn
σx
σy
σn
Ing. G. Elías Belmonte C.
8
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
Compresión ( -) Entran las tensiones perpendicularmente a las caras del
elemento diferencial, ejemplo:
σy
σx
σn
σx
σn
σy
Tensiones de corte
Positivas ( +) El par cortante cuyas tensiones son paralelas a las caras del
elemento diferencial lo hacen girar a favor de las agujas del reloj, ejemplos:
τyx
τxy
τxy
+
τnt
+
τnt
τyx
Negativas ( -) El par cortante cuyas tensiones son paralelas a las caras del
elemento diferencial lo hacen girar en contra de las agujas del reloj, ejemplos:
τxy
-
τxy
τyx
τyx
τnt
-
τnt
Angulo de rotación del plano oblicuo (φ)
Positivo ( + ) En contra de las agujas del reloj
+ φ
Negativo ( - ) A favor de las agujas del reloj
-
φ
Ing. G. Elías Belmonte C.
9
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
b) Construcción del circulo
Escala .- Se adopta una escala en cm. de las tensiones y se las transforma
para poder representarlas en un plano cartesiano (σ, τ ).
Ubicación de los planos X y Y que corresponden a dos puntos del perímetro
del circulo equidistantes a 180o
Plano X
E (σx,
τxy )
Plano Y
F (σy,
τyx )
Ubicación del centro del circulo.- Se une mediante una recta los puntos E y
F donde corta esta recta el eje de las tensiones normales (σ), es el centro del circulo
(C)
Trazado del circulo.- Conociendo la ubicación del centro (C) y sabiendo
que las rectas CE y CF son radios del circulo, ya estamos en condiciones de
proceder a trazarlo.
τ
E (σx, τxy )
σ
o
C
F (σy, τyx)
Ing. G. Elías Belmonte C.
10
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
Representación de los elementos del circulo.- Una vez hemos aprendido a
construir él circulo, es necesario conocer que representa cada uno de los elementos
que componen él circulo los cuales detallaremos a continuación.
+φ
τ
X
n (σn, τnt)
+2φxn
o
+2φxy=180
C
E (σx, τxy )
-φ
Eje X
σ
Y
o
τyx
EJE Y
o
+φxy = 90
σy
Estado tensional
σx
τxy
F (σy, τyx)
Y
t (σt, τtn)
t
CE
CF
Cn
Ct
+2φxn
Nota 1
Nota 2
Nota 3
X respecto a los
planos
X,Y
Y
Representa el eje " X "
n
Estado tensional
Representa el eje " Y "
σt
σn
+φxn
Representa el eje " n "
respecto a los
τtn
Representa el eje " t "
planos
τnt
X
Representa la posición del plano "n"
n,t
con respecto al plano "X"
Si nos fijamos en los esquemas en el
circulo los ángulos varían en 2φ y en
los elementos diferenciales varían en φ
Los planos "Y" y "t" también se los denomina planos
complementarios de los de los planos "X" y "n" respectivamente
porque quedan ubicados a 90o de los mismos.
Cada punto del perimetro del circulo representa un estado de tensiones
ligado a un plano diferente. Por ejemplo el punto n representa el estado
de tensiones ligado al plano n-n cuya normal forma un angulo φxn
con el eje X
Ing. G. Elías Belmonte C.
11
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
Estados Tensiónales Máximos y Mínimos
+φ
τ
σH = σH
X
H
+2φxH
E (σx, τxy )
EJE H
o
-φ
-2φx1
C
2
1
τmax
σ
EJE 1
EJE 2
EJE H
τmin
F (σy, τyx)
Y
Hl
σ2
σ1
2
Y
τyx
σy
+φxy = 90o
σx
τxy
σ1
X
σ2
H
σ2
σ1
σH
X
-φx1
1
τmax
+φxH
τmin
σH
X
H
Estado tensional
respecto a los
planos
X,Y
Estado tensional Principal
respecto a los
planos
1,2
Estado tensional de
Corte maximo y minimo
respecto a los planos
H,H
C1
Representa el eje principal “1” donde se produce el esfuerzo
principal “1” o esfuerzo normal máximo.
C2
Representa el eje principal “2” donde se produce el esfuerzo
principal “2” o esfuerzo normal mínimo.
φX1
Representa el ángulo que forma el eje “x” con el eje “1”
CH
Representa el eje “H” donde se produce el esfuerzo de corte máximo.
Ing. G. Elías Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
8.5
CH
Representa el eje “H” donde se produce el esfuerzo de corte mínimo
φXH
Representa el ángulo que forma el eje “x” con el eje “H”.
12
Formulación de los estados máximos y mínimos
de esfuerzos normales y cortantes
Partiendo del conocimiento que nos proporciona él circulo de Morh
podemos plantear fácilmente las ecuaciones que gobiernan los esfuerzos máximos
y mínimos.
+φ
τ
σH = σH
X
H
E
+2φxH
EJE H
C
2
o
τxy
-2φx1
-φ
τmax
σ
1
EJE 1
EJE 2
EJE H
τmin
F
Y
Hl
σ2
σ1
σ1 + σ2
2
σ1 - σ2
2
8.5.1 Esfuerzos Principales o Esfuerzos normales máximos y mínimos
Esfuerzo principal “1” o Esfuerzo normal máximo
σ1 =
σx + σy
+
2
σx - σy
2
2
2
+ τxy
Ing. G. Elías Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
Esfuerzo principal “2” o Esfuerzo normal mínimo
σ2 =
13
σx + σy
2
σx - σy
2
-
2
2
+ τxy
Angulo que forma el eje “X” con el eje “1”
Tan2φx-1 = -
2τxy
σx - σy
8.5.2 Esfuerzo de corte máximo y mínimo (Ejes H y HI)
Esfuerzo de corte máximo
τmax =
τxy
2
τxy
2
Esfuerzo de corte mínimo
τmin =
+
σx - σy 2
+
2
-
σx - σy 2
+
2
Angulo que forma el eje “X” con el eje “H”
φX-H = φx-1 - 45o
Esfuerzos normales
σH =
σH =
σx + σy
2
σx + σy
2
Ing. G. Elías Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
14
Ejemplos
8.6
8.6.1
Ejemplo No 1
Pregunta
Mediante un análisis previo se determino el estado tensional respecto a los ejes
(X, Y) correspondientes al elemento diferencial marcado en la pieza de la figura, dando
como resultado los siguientes valores:
P1
P2
Y
Pi
X
Elemento
diferencial
DATOS
σx = 1000.00 kg/cm2
σy = -1500.00 kg/cm2
τxy = - 500.00 kg/cm2
τyx = 500.00 kg/cm2
P5
P3
P4
A.
Para el elemento diferencial, Dibujar el estado tensional respecto a los ejes (X, Y).
B.
Mediante el método grafico numérico del circulo de Mohr determinar para el
elemento diferencial lo siguiente:
B.1 Estado Tensional Principal, Dibujar el elemento diferencial mostrando el
estado tensional en sus caras.
B.2 Estado Tensional Para Corte Máximo y Mínimo, Dibujar el elemento
diferencial mostrando el estado tensional en sus caras.
B.3 Estado tensional para plano φX-1 = - 110° y su plano complementario, Dibujar
elemento diferencial mostrando el estado tensional en su cara.
C.
Mediante el Metodo analitico comprueba los resultados del inciso “ B”
Ing. G. Elías Belmonte C.
8.6
8.6.1
Ejemplos
Ejemplo No 1
14
Pregunta
Mediante un análisis previo se determino el estado tensional respecto a los ejes
(X, Y) correspondientes al elemento diferencial marcado en la pieza de la figura, dando
como resultado los siguientes valores:
P1
P2
Y
Pi
X
Elemento
diferencial
DATOS
σx = 1000.00 kg/cm2
σy = -1500.00 kg/cm2
τxy = - 500.00 kg/cm2
τyx = 500.00 kg/cm2
P5
P3
P4
A.
Para el elemento diferencial, Dibujar el estado tensional respecto a los ejes (X, Y).
B.
Mediante el método grafico numérico del circulo de Mohr determinar para el
elemento diferencial lo siguiente:
B.1 Estado Tensional Principal, Dibujar el elemento diferencial mostrando el
estado tensional en sus caras.
B.2 Estado Tensional Para Corte Máximo y Mínimo, Dibujar el elemento
diferencial mostrando el estado tensional en sus caras.
B.3 Estado tensional para plano φX-1 = - 110° y su plano complementario, Dibujar
elemento diferencial mostrando el estado tensional en su cara.
C.
Mediante el Metodo analitico comprueba los resultados del inciso “ B”
Solución
A.
σy= -1500 kg/cm2
τyx
σx
2
σx = 1000 kg/cm
τxy= -500 kg/cm2
τxy
σy
τyx= 500 kg/cm2
ESTADO TENSIONAL
RESPECTO A LOS
EJES (X; Y)
Ing. Elias Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
15
B. CIRCULO DE MOHR
σn
H
σH
σH
τ
n
τnt
τmax
F
2φxH
C
2
σx
O
1
σ
2φx1 τ
xy
-2φxn
τtn
E
τmin
X
t
HI
σt
σ2
ESCALA : 1.00 cm : 224.38 kg/cm2
σ1
2
B.1 Estado Tensional Principal
σ1 = 4.90 cm x Esc. = 1099.46 kg/cm2
σ2 = 7.10 cm x Esc. = 1593.10 kg/cm2
φx1 = 11o
2φx1 = 22o
σ2
φx1
X
σ1
σ2
H
B.2 Estado Tensional de Corte maximo y minimo
τmax = 6.00 cm.x Esc = 1346.28 kg/cm2
τmin = 6.00 cm.x Esc = 1346.28 kg/cm2
σH = 1.11 cm x Esc. = - 249.06 kg/cm2
σH = 1.11 cm x Esc. = - 249.06 kg/cm2
φXH = 56o
2φXH = 112o
1
σ1
H
σH
σH
τmax
φxH
τmin
σH
σH
Ing. G. Elias Belmonte C.
X
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
16
B.3 Estado tensional para plano φX-1 = -110° y su plano complementario
σn = - 4.0 cm x Esc. = -897.52 kg/cm2
σt = 1.75 cm x Esc. = 392 kg/cm3
τnt = 5.2 cm.x Esc = 1166.78 kg/cm2
τtn = -5.20 cm.x Esc = -1166.78 kg/cm3
τnt
τtn
σn
X
σt
t
n
C. Comprobacion analitica de los resultados del inciso “ B“
φxn
C.1 Estados Tensionales Principales
σ1 =
σx + σy
2
+
σx - σy
2
2
2
+ τxy
σ1 = 1096.29 k/cm2
σ2 =
σx + σy
2
-
σx - σy
2
2
2
+ τxy
σ2 = - 1596.29 k/cm2
2τxy
σx - σy
Tan2φx-1 = -
2φx-1 = + 21.80o
= 0.4
φx-1 = +10.90o
C.2 Estado Tensional Corte maximo y Corte minimo
τmax =
τmin =
σH =
σH =
+
σx - σy 2
+
2
τxy
2
τmax = 1346.29 k/cm2
-
σx - σy 2
+
2
τxy
2
τmin = - 1346.29 k/cm2
σx + σy
2
σH = - 250 k/cm2
σx + σy
2
σH = - 250 k/cm2
φX-H = φx-1 + 45o
C.3 Estado Tensional para
C.3.1. Para
σn =
τnt =
φX-H = - 55.90o
φX-n = - 110o y su plano complementario
φX-n = - 110o
σx - σy
σx + σy
+
2
2
σx - σy Sen2φ
X-n
2
+
Cos2φX-n - τxy Sen2φX-n
σn = - 886.16 k/cm2
τxy Cos2φX-n
τnt = 1186.51 k/cm2
Ing. G. Elias Belmonte C.
ESTUDIO BIDIMENSIONAL DE TENSIONES EN PLANOS OBLICUOS
17
C.3.2. Para el plano complementario
o
o
φX-t = φX-n + 90 = -40
σx + σy
σx - σy
+
2
2
Cos2φX-t - τxy Sen2φX-t
σt = + 386.16 k/cm2
τxy Cos2φX-t
τtn = - 1186.51 k/cm2
σt =
τtn =
σx - σy Sen2φ
X-t
2
+
TENSIONES EN SECCIONES DE VIGAS EN PLANOS OBLICUOS
18
EJERCICIO No 1
Sea la viga de sección compuesta mostrada en la figura:
1.
Para la sección ( c – c ) diagrama las Tensiones Normales (σc-c) y las
Tensiones Cortantes ( τc-c )
2.
Para el elemento diferencial “C” determinar el estado tensional respecto a
los ejes (X, Y), Dibujar el elemento diferencial mostrando el estado
tensional en sus caras.
3.
Mediante el método grafico numérico del circulo de Mohr determinar para el
elemento diferencial “C” lo siguiente:
3.1. Estado Tensional Principal, Dibujar el elemento diferencial
Mostrando el estado tensional en sus caras.
3.2.
Estado Tensional Para Corte Máximo y Mínimo, Dibujar él
Elemento diferencial mostrando el estado tensional en sus caras.
3.3.
Estado tensional para plano
φx-1 = - 60° y su plano
complementario, Dibujar el elemento diferencial mostrando el estado
tensional en sus cara
4.
Mediante el Método analítico comprueba los resultados del inciso “ 3 “
q=4000 kg/m
c
P = 4000 kg
8 cm
5.00 cm
5.00 cm
Elemento
Diferencial
1cm
Aluminio
15.00cm
C
5
c
0.6m
4 5 cm
Seccion
Ra
0.6m
Aluminio
Acero
M = 6000 kg-m
0.6m
0.6m
0.6m
Rb
0.6m
Real
Modulos de Elasticidad
Eal = 5.0 E5 k/cm2
Eac = 2.0 E6 k/cm2
Ing. Elias Belmonte Clementelli
TENSIONES EN SECCIONES DE VIGAS EN PLANOS OBLICUOS
19
Solucion
1. Diagramas de Tensiones Normales y Cortantes para la seccion c - c
1.1. Calculo de solicitaciones en la seccion c -c
1.1.1. Calculo de reacciones
Ma = 0
qx1.8x0.3 - M + px3.0 - Rbx2.4 = 0
V=0
Ra + Rb - qx1.8 - p = 0
Rb = 3400 kg
Ra = 7800 kg
1.1.2. Diagramas M y Q
q=4000 kg/m
c
P = 4000 kg
c
M = 6000 kg-m
Ra = 7800 kg
0.6m
Rb = 3400kg
1.2m
0.6m
0.6m
0.6m
5400 kg
V c-c = 3000 kg
4000 kg
+
+
Q
600 kg
2400 kg
2760 kg-m
2400 kg-m
720
720 kg-m
M
+
Mc-c = 1800 kg-m
2880 kg-m
3240 kg-m
Vc-c = -qx1.2 +Ra = 3000 kg
Mc-c = -qx1.2x.6 +Rax0.6 =1800.00 kg-m
Ing. Elias Belmonte Clementelli
TENSIONES EN SECCIONES DE VIGAS EN PLANOS OBLICUOS
20
1.2 Transformacion de la seccion real en seccion equivalente
n1= Eal / Eal = 1.00
n2 = Eac/Eal =
be = nixbr Ecc. de Transfornacion a seccion equivalente
4.00
bases
n1b1
Aluminio
1cm Acero
5.00 cm
5.00 cm
14.00
5
be = nixbr
n2b3
8
15.00cm
11.92
Csup
1
2
3
13.08
Cinf
LN
5
15
Aluminio
5
4
X
n1b4
10.00
Seccion equivalente
Aluminio
4 5 cm
Seccion
Real
1.3. Ubicación linea neutra en Seccion Equivalente
Cinf =
A1Y1 + A2Y2 + A3Y3
A1 + A2 + A3
Cinf =
13.08
cm
Csup=
11.92
cm
Areas
F1
F2
F3
h
15.00
5.00
5.00
25.00
b
10.00
8.00
14.00
Yi
7.50
17.50
22.50
Ai
150.00
40.00
70.00
260.00
Igi
2812.50
83.33
145.83
di=(Cinf - Yi)
5.58
-4.42
-9.42
Ini
7477.81
865.88
6361.44
14705.13
1.4 Calculo de inercia en la linea neutra en la seccion Eqquivalente
InT = In1 + In2 + In3
Steiner
2
Ini = Igi + Aidi
Inercia baricentrica del rectangulo
In1 =
7477.81
In2 =
865.88
In3 =
6361.44
Int =
14705.13
Ig = bh3/12
Xg
Ing. Elias Belmonte Clementelli
TENSIONES EN SECCIONES DE VIGAS EN PLANOS OBLICUOS
21
1.5. Calculo de Tensiones normales en la seccion c - c
σe =
Mc-cCi
Int
Tension normal equivalente
σr = ni σe
Seccion
c-c
1
2s
2i
C
3s
3i
Ln
4
Tension normal real
Mc-c
Ci
k-m
4
cm
cm
1800.00
1800.00
1800.00
1800.00
1800.00
1800.00
1800.00
1800.00
σe
Int
11.92
6.92
6.92
3.92
1.92
1.92
0.00
13.08
σr
ni
k/cm2
14705.13
14715.13
14715.13
14715.13
14715.13
14715.13
14715.13
14715.13
k/cm2
-145.95
-84.69
-84.69
-47.99
-23.52
-23.52
0.00
159.96
1.00
1.00
4.00
4.00
4.00
1.00
1.00
1.00
-145.95
-84.69
-338.74
-191.95
-94.09
-23.52
0.00
159.96
1.6. Diagramas de Tensiones Nomales
145.95 k/cm2
145.95 k/cm2
-
1
-
338.74 k/cm2
94.09 k/cm2
2
-191.95 k/cm2
3
LN
+
+
4
159.96 k/cm2
159.96 k/cm2
Diagrama de Tension Normal
Equivalente para la
seccion c-c
Diagrama de Tension Normal
Real para la
seccion c-c
1.7. Calculo de Tensiones de Corte en la seccion c - c
τe =
τr =
Seccion
1
2s
2i
C
3s
3i
Ln
4
Vc-c Me
bi Int
ni τe
Vc-c
3000.00
3000.00
3000.00
3000.00
3000.00
3000.00
3000.00
3000.00
Tension cortante equivalente
Tension cortante real
Me
0.00
659.62
659.62
789.77
836.54
836.54
855.03
0.00
Int
14705.13
14715.13
14715.13
14715.13
14715.13
14715.13
14715.13
14715.13
be
14.00
14.00
8
8
8
10
10
10
τe
0.00
9.61
16.81
20.13
21.32
17.05
17.43
0.00
τr
ni
1.00
1.00
4.00
4.00
4.00
1.00
1.00
1.00
0.00
9.61
67.24
80.51
85.27
17.05
17.43
0.00
Ing. Elias Belmonte Clementelli
TENSIONES EN SECCIONES DE VIGAS EN PLANOS OBLICUOS
22
1.8. Diagramas de Tensiones de Corte en la seccion c - c
0.00 k/cm2
9.61k/cm2
16.81k/cm2
17.05k/cm2
1
0.00 k/cm2
9.61k/cm2
21.32k/cm2
17.05k/cm2
17.43k/cm2
2
67.24k/cm2
80.51k/cm2
3
85.27k/cm2
17.43k/cm2
+
LN
+
4
0.00 k/cm2
0.00 k/cm2
Diagrama de Tension Cotante
Equivalente para la
seccion c-c
Diagrama de Tension Cortante
Real para la
seccion c-c
2. Estado Tensional del elemento diferencial " C " respecto a lo ejes (X,Y)
σx = -191.95
k/cm2
τyx
2
σy = 0.00
k/cm
τxy = 80.51
τyx = -80.51
k/cm2
σx
τxy
k/cm2
C
σx = - 307.13 k/cm2
τxy = - 16.10 k/cm2
τxy = 16.10k/cm2
3. Solucion a planos oblicuos por el metodo grafico numerico del Circulo de Mohr
E(σx,τxy) = E(-191.95 , 80.51) : (-9.19,3.86)
esc 1cm:20.879k/cm2
F(σy,τyx) = F(0.00 ,- 80.51) : (0.00,0.63)
τ
H
x
E
φx-H
φx-n
n
2
1
C
σ
O
φx-1
t
F
HI
Ing. Elias Belmonte Clementelli
TENSIONES EN SECCIONES DE VIGAS EN PLANOS OBLICUOS
23
3.1 Estados Tensionales Principales
1
Esc 1cm : 20.879k/cm2
Y
σ1
φx-1= 110o
σ1 = 1.40cmxEsc 29.29 kg/cm2
σ2 = - 10.6cmxEsc = - 221.32 kg/cm2
C
σ2
φx-1 = 110o
220o
2φx-1 =
σ2 = - 221.32 k/cm2
X
σ1 = 29.29 k/cm2
2
3.2 Estado Tensional Corte maximo y Corte minimo
H
σH
Y
Esc 1cm : 20.879k/cm2
τmax
τmax = 6.00cmxEsc = 125.27 k/cm2
σH = - 96.04 k/cm2
- 6.00cmxEsc = - 125.27 k/cm
τmin =
2
σH = - 4.60cmxEsc = - 96.04 k/cm
C
φX-H =
3.3 Estado Tensional para
- 25o
φX-n = - 60o y su plano complementario
Y
σn
Esc 1cm : 20.879k/cm2
τtn = - 41.76k/cm2
C
2.00cmxEsc = 41.76 k/cm2
t
σt
τnt = 41.76k/cm2
σn = 1.00cmxEsc = 20.88 k/cm2
τnt =
H
σH = - 96.04 k/cm2
- 50o
X
φX-H = - 25o
σH
τmin
2
σH = - 4.60cmxEsc = - 96.04 k/cm2
2φX-H =
τmin = - 125.27k/cm2
τmax = 125.27k/cm2
X
2
σt =- 219.23k/cm
2
σt =
10.5cmxEsc = - 219.23 k/cm
τtn =
2.00cmxEsc = - 41.76 k/cm2
τtn
τnt
σn = 20.88k/cm2
φx-n =- 60
o
n
4. Solucion a planos oblicuos por el metodo Analitico
4.1 Estados Tensionales Principales
σ1 =
σx + σ y
+
2
σx - σ y
2
2
2
+ τxy
σ1 =
σ2 =
σx + σ y
2
σx - σ y
2
2
2
+ τxy
σ2 = - 221.25 k/cm2
Tan2φx-2 = φX-1 =
-
2τxy
σx - σ y
φx-2 + 90o
= 0.8389
2φx-2 = + 39.99o
29.29 k/cm2
φx-2 = + 20o
φX-1 = +110o
Ing. Elias Belmonte Clementelli
TENSIONES EN SECCIONES DE VIGAS EN PLANOS OBLICUOS
24
3.2 Estado Tensional Corte maximo y Corte minimo
τmax =
τmin =
σH =
σH =
+
σx - σ y 2
+
2
τxy
2
τmax = 125.27 k/cm2
-
σx - σ y 2
+
2
τxy
2
τmin = - 125.27 k/cm2
σx + σ y
2
σH = - 95.98 k/cm2
σx + σ y
2
σH = - 95.98 k/cm2
φX-H = φx-2 - 45o
3.3 Estado Tensional para φX-n =
3.3.1. Para φX-n =
σn =
τnt =
φX-H = - 25o
- 60o
- 60o
σx - σ y
σx + σ y
+
2
2
σx - σy Sen2φ
X-n
2
+
3.3.2. Para el plano complementario
σt =
τtn =
y su plano complementario
σx + σ y
σx - σ y
+
2
2
σx - σy Sen2φ
X-t
2
+
Cos2φX-n - τxy Sen2φX-n
σn = 21.73 k/cm2
τxy Cos2φX-n
τnt = 42.87 k/cm2
o
φX-t = φX-n + 90 = 30o
Cos2φX-t - τxy Sen2φX-t
σt = - 213.68 k/cm2
τxy Cos2φX-t
τtn = - 42.87 k/cm2
Ing. Elias Belmonte Clementelli