"Diseño de anticontroladores de retardo para sistemas lineales y no
Anuncio

INSTITUTO POLITÉCNICO NACIONAL
CENTRO DE INVESTIGACIÓN Y DESARROLLO
DE TECNOLOGÍA DIGITAL
MAESTRÍA EN CIENCIAS CON
ESPECIALIDAD EN SISTEMAS DIGITALES
“DISEÑO DE ANTICONTROLADORES DE RETARDO PARA
SISTEMAS LINEALES Y NO LINEALES DE TRES DIMENSIONES”
TESIS
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
P R E S E N T A:
OSWALDO CUEN TÉLLEZ
BAJO LA DIRECCIÓN DE:
DR. KONSTANTIN E. STARKOV
JUNIO DE 2005
TIJUANA, B.C. , MÉXICO
A Mis Padres:
Ramón Alberto Cuen Sánchez y
María Higinia Téllez Soto
Agradecimientos
Quiero agradecer a mis Padres por todo el apoyo que me han dado, a mis Hermanos,
Fabiola, Alberto y Susana por estar siempre ahí cuando los he necesitado, a toda mi
Familia por la ayuda que me han brindado, al Dr. Starkov por su paciencia y sus
enseñanzas, a todos los profesores y personal de CITEDI por haber colaborado en el
proceso de elaboración de mi trabajo de tesis. A todos ustedes gracias.
Índice
Lista de Figuras ................................................................................................................iii
Lista de Tablas................................................................................................................... v
Resumen ............................................................................................................................ vi
Abstract ............................................................................................................................vii
Capítulo 1 Introducción................................................................................................... 1
Capítulo 2 Conceptos Básicos.......................................................................................... 4
2.1
Sistemas Dinámicos ............................................................................................. 4
2.1.1
Sistemas Lineales y No Lineales........................................................... 6
2.2
Atractor................................................................................................................. 7
2.3
Caos ...................................................................................................................... 7
2.3.1
Atractor Caótico .................................................................................... 8
2.4
Ecuación Diferencial con Retardo...................................................................... 10
2.5
Función Racional................................................................................................ 11
2.6
Función Suave .................................................................................................... 11
2.7
Mapeo................................................................................................................. 11
2.8
Campo Vectorial ................................................................................................ 12
2.9
Difeomorfismo ................................................................................................... 12
2.10 Derivada de Lie .................................................................................................. 12
Capítulo 3 Diseño de Anticontroladores de Retardo .................................................. 14
3.1
Preeliminar al Diseño de Anticontrol de Retardo .............................................. 14
3.1.1
Linealización ....................................................................................... 16
3.2
Metodología para el Diseño de Anticontrol de Retardo..................................... 17
3.3
Diseño de Anticontroladores con retroalimentación de Retardo........................ 20
3.3.1
Sistema de Lorenz usando r como parámetro de control................... 20
3.3.2
Sistema I usando B como parámetro de control ................................ 24
3.3.3
Sistema de Rössler usando b como parámetro de control ................. 26
3.3.4
Sistema de Lorenz usando b como parámetro de control.................. 29
3.3.5
Sistema Modificado de Lorenz usando κ como
parámetro de control............................................................................ 31
3.3.6
Sistema de Liu usando b como parámetro de control........................ 34
3.3.7
Sistema de Rucklidge usando b como parámetro de control............. 37
3.3.8
Sistema de Rand usando a como parámetro de control..................... 39
Capítulo 4 Simulación Numérica .................................................................................. 43
4.1
Sistema de Lorenz usando r como parámetro de control.................................. 43
4.2
Sistema I usando B como parámetro de control ............................................... 45
4.3
Sistema de Rössler usando b como parámetro de control ................................ 46
i
4.4
4.5
4.6
4.7
4.8
Sistema de Lorenz usando b como el parámetro de control ............................. 49
Sistema Modificado de Lorenz usando κ como parámetro de control............. 51
Sistema de Liu usando b como parámetro de control....................................... 53
Sistema de Rucklidge usando b como parámetro de control............................ 55
Sistema de Rand usando a como parámetro de control.................................... 57
Capítulo 5 Aplicaciones .................................................................................................. 60
Capítulo 6 Conclusiones.................................................................................................. 62
Apéndice A: Campos Vectoriales Relacionados ........................................................... 64
Bibliografía y Referencias .............................................................................................. 67
ii
Lista de Figuras
2.3
(a) El atractor caótico de Lorenz en tres dimensiones; ..................................................10
(b) Proyección de dos dimensiones de la trayectoria del sistema de Lorenz .................10
2.10
Esquema ilustrativo de la derivada de Lie .....................................................................13
4.1
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.1.1 y su correspondencia en coordenadas
x del sistema de Lorenz usando r como parámetro
de control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 ,
(b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 ...............................................................................44
4.2
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.2.1 y su correspondencia en coordenadas
x del sistema I usando B como parámetro de control.
(a) y1 − y2 , (b) x1 − x2 ..................................................................................................46
4.3
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.3.1 y su correspondencia en coordenadas
x del sistema de Rössler usando b como parámetro
de control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 ,
(b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 ...............................................................................48
4.4
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.4.1 y su correspondencia en coordenadas
x del sistema de Lorenz usando b como parámetro
de control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 ,
(b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 ...............................................................................50
4.5
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.5.1 y su correspondencia en coordenadas
x del sistema Modificado de Lorenz usando κ como
parámetro de control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 ,
(b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 ...............................................................................52
iii
4.6
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.6.1 y su correspondencia en coordenadas
x del sistema de Liu usando b como parámetro de control.
(a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 ,
(d) x2 − x3 , (f) x1 − x3 ...................................................................................................54
4.7
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.7.1 y su correspondencia en coordenadas
x del sistema de Rucklidge usando b como parámetro
de control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 ,
(b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 ...............................................................................56
4.8
Gráficas de las proyecciones del atractor caótico generado
por el sistema 4.8.1 y su correspondencia en coordenadas
x del sistema de Rand usando a como parámetro
de control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 ,
(b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 ...............................................................................59
iv
Lista de Tablas
3.1
Lista de sistemas y parámetros utilizados para el diseño de
anticontroladores............................................................................................................20
v
Resumen
En este trabajo de tesis se estudia el problema de caotificación o anticontrol a través
retroalimentación de retardo para sistemas no lineales continuos de tres dimensiones, con
el propósito de crear caos en sistemas no caóticos y para aumentar el rango de valores de
parámetros para los cuales un sistema caótico mantiene su comportamiento caótico. La
caotificación se realiza introduciendo una perturbación en uno de los parámetros del
sistema, el cual es llamado el parámetro de control. Este problema se resuelve resuelto en
dos pasos: Primero, a través del uso de un mapeo polinomial, se transforma el sistema
inicial en una ecuación diferencial ordinaria escalar de tercer orden con una no linealidad
racional. En el segundo paso se aplica el anticontrol por retroalimentación propuesto por
Wang, Chen y Yu en [36]. Los diseños de caotificación son aplicados a siete sistemas, el
sistema de Lorenz, tomando como parámetros de control a dos de sus parámetros en
forma separada, el sistema I, el sistema de Rössler, el sistema de Lorenz modificado, el
sistema de Liu, el sistema de Rucklidge y el sistema de Rand.
vi
Abstract
The chaotification or anticontrol problem of three dimensional nonlinear continuoustime systems via time-delay feedback is studied in this thesis, with the purpose of creating
chaos in nonchaotic systems and enlarges the range of parameter values for which an
originally chaotic system remains with its chaotic behavior. The chaotification is made by
means of a parameter perturbation, this parameter is called the control parameter. This
problem is solved in two steps. First, by using a polynomial mapping we transform the
initial system to a third order explicit scalar ordinary differential equation with a rational
nonlinearity. On the second step we apply the anticontrol feedback proposed by Wang,
Chen and Yu in [36]. This anticontrol method is applied to seven systems: the Lorenz
system choosing two of its parameters as control parameters separately, the I system, the
Rössler system, the modified Lorenz system, the Liu system, the Rucklidge system and
the Rand system.
vii
Capítulo 1
Introducción
El anticontrol de caos o caotificación es la tarea opuesta a controlar o eliminar el caos
en los sistemas dinámicos, y se utiliza cuando el caos es deseable en un sistema, para
llevar a cabo una aplicación específica, ya que brinda una serie de elementos que son de
gran ayuda en la solución de diversos problemas [1, 3, 6, 8, 18, 19, 23]. El anticontrol de
caos, es pues, la creación o el mantener el caos en los sistemas [35] y ha tenido un
creciente interés en los últimos años. Este es debido a la gran utilidad del caos en algunas
aplicaciones críticas de tiempo y/o energía, donde el caos puede proveer al diseñador con
un sistema una gran variedad de propiedades especiales, flexibilidad, y un gran número
de posibilidades. Algunos ejemplos de estas aplicaciones son el mezclado de fluidos [18,
19], regulaciones neuronales y cardiacas en el área médica [1, 23], prevención de
resonancia en sistemas mecánicos [3] y en comunicaciones seguras [6, 8]. Se espera que
las investigaciones sobre el caos en ingeniería eventualmente lleguen al punto en donde
los procesos de diseño estén tan avanzados y refinados que será posible que un diseñador
pueda hacer que un sistema sea caótico o no caótico a voluntad del mismo [36].
En trabajos de investigación se ha demostrado que el caos puede ser controlado por
pequeñas perturbaciones [32, 33, 34, 35]. También se ha visto que es posible hacer que
un sistema cualquiera se convierta en caótico o aumentar algunas las cualidades caóticas
de los sistemas que originalmente ya lo eran [36], puesto que se ha demostrado que
cualquier sistema autónomo discretizado en tiempo con dimensión finita, incluso
sistemas originalmente estables, pueden ser llevados a ser caóticos por medio del uso de
pequeñas señales de control por retroalimentación de estados [32, 33]. Sin embargo, cabe
resaltar, que este método utiliza un control por retroalimentación de la totalidad de los
estados del sistema, lo cual no es muy deseable en algunas aplicaciones, lo que ha llevado
a buscar alguna otra metodología diferente.
1
En [37] se estudió el problema de llevar sistemas continuos al caos a través una
entrada de control impulsiva, esto es posible siempre y cuando el sistema dado está cerca
de un ciclo límite estable. En [31] se investiga el rol de la función x x en la generación
de caos en sistemas no autónomos. En [38] se estudia la generación de caos en sistemas
lineales autónomos a través de un controlador no lineal por retroalimentación, donde se
requiere de una selección precisa de parámetros y ganancias tanto del sistema como del
controlador para llevarlo a cabo.
En este trabajo de tesis se aplica una técnica de anticontrol de caos que es muy
diferente en su naturaleza a los métodos mencionados anteriormente, ya que este diseño
de anticontrol se aplica a sistemas continuos en el tiempo y no requiere ningún proceso
de discretización. Esta técnica también tiene la capacidad de convertir un sistema no
lineal autónomo continuo en el tiempo en caótico, siempre y cuando el sistema cumpla
ciertas condiciones que se mencionan mas adelante. En este trabajo se aplica el diseño de
anticontrol principalmente a sistemas no lineales que son originalmente caóticos, debido
a que dentro del mismo proceso de diseño se genera caos a un sistema lineal. Se
incrementará el rango de valores de los parámetros de diversos sistemas caóticos para los
cuales estos sistemas continúan presentando caos, por medio de la aplicación de una
entrada de control adecuada.
La herramienta principal para la generación de caos en este trabajo es la
retroalimentación con retardo a través de una perturbación en uno de los parámetros del
sistema. Un sistema con retardo tiene la capacidad de producir comportamientos
complejos, tal como lo es el caos, incluso en sistemas tan simples como los de primer
orden.
El método de anticontrol propuesto consta de dos pasos. En el primero, a través del
uso de un mapeo polinomial se transforma el sistema original en una ecuación diferencial
ordinaria escalar de orden n con una no linealidad racional. En el segundo paso se aplica
el anticontrol a través de una retroalimentación con retardo propuesta por Wang, Chen y
2
Yu en [36]. En el primer paso transformamos al sistema de su representación de variables
de estado:
x = f ( x, uˆ )
(1.1.1)
a una forma de ecuación diferencial ordinaria de orden n:
y ( n ) = φ ( y ) +ψ ( y )uˆ
(1.1.2)
donde φ y ψ son funciones no lineales suaves de y = [ y, y,..., y ( n −1) ]T , y û es uno de los
parámetros del sistema, que será llamado el parámetro de control, donde:
y = h(x)
(1.1.3)
es una función suave escalar que satisface h(0) = 0 .
En el segundo paso se sustituye el parámetro de control û por u (t ) que consiste en:
u (t ) = uˆ + δ u (t , x(t ))
(1.1.4)
donde û es el valor constante del parámetro de control y δu es una perturbación al
parámetro y contiene términos que cancelarán las no linealidades del sistema original e
introducirá la retroalimentación con retardo, lo cual llevará al sistema caótico a que su
rango de valores de parámetros sea mayor sin que deje de ser caótico. En el capítulo 3 se
explicará en que consiste el término δu .
En el capítulo 2 se presentan algunos conceptos generales que se manejaran a lo largo
de este trabajo. En el capítulo 3 se explica la metodología para el diseño de
anticontroladores con retroalimentación de retardo, así como, también, se realizan los
diseños para los sistemas considerados. En el capítulo 4 se realizan las simulaciones
numéricas para todos los sistemas a los que se les aplicó el diseño de anticontrol. Los
sistemas considerados en este trabajo de tesis son el sistema de Lorenz [13] (con r y
b como parámetros de control), el sistema de Liu [11], el sistema de Rössler [20], el
sistema I [24], el sistema de Lorenz Modificado [15], el sistema de Rucklidge [16] y el
sistema de Rand [21]. En los últimos dos capítulos se presentan las aplicaciones y
conclusiones.
3
Capítulo 2
Conceptos Básicos
En este capítulo se presenta una explicación breve de los conceptos básicos que serán
utilizados a lo largo del desarrollo de este trabajo.
2.1 Sistemas Dinámicos
Un sistema es una combinación de componentes que actúan conjuntamente y
cumplen determinado objetivo [17]. Un sistema dinámico es un modelo matemático que
describe la evolución de todos los estados posibles de un sistema en un espacio de estado,
en función del tiempo [7]. Dado un estado inicial del sistema, la evolución de los estados
subsecuentes a través del tiempo se le conoce como “trayectoria” o “movimiento”. Para
representar a un sistema dinámico se utilizan una ecuación diferencial.
Los sistemas dinámicos pueden ser estocásticos o deterministas, en los sistemas
estocásticos las reglas que modelan la respuesta del sistema son distribuciones de
probabilidad y en los sistemas deterministas cualquiera estado futuro o pasado del
sistema está determinado por el estado del sistema en determinado instante de tiempo. En
este trabajo se trata únicamente con sistemas dinámicos deterministas.
El estado de un sistema x ∈ Ω ⊆
n
, esta definido por n número variables. Donde a
Ω se le denomina como el espacio de fase del sistema dinámico. Los estados representan
la memoria que el sistema dinámico tiene de su pasado y al número n se le conoce como
la dimensión del sistema.
Un valor del vector x(t ) representa la configuración presente que tiene el sistema en
un tiempo específico t. En adición con los estados del sistema y el tiempo t,
los
4
parámetros son constantes forman parte de las reglas que definen la evolución del
sistema.
Los sistemas dinámicos son modelados por n número de ecuaciones diferenciales
ordinarias de primer orden [9]:
x1
x2
=
=
f1 (t , x1 ,..., x n , u1 ,..., u p )
f 2 (t , x1 ,..., x n , u1 ,..., u p )
xn
=
f n (t , x1 ,..., x n , u1 ,..., u p )
(2.1.1)
donde xi denota la derivada de xi con respecto a la variable tiempo t, y u1 , u 2 ,....u p son
variables de entrada. Las variables x1 , x 2 ,..., xn se conocen como las variables de estado
del sistema. Reescribiendo las n ecuaciones diferenciales de primer orden como una
ecuación diferencial vectorial de primer orden
x = f (t , x, u ) ,
(2.1.2)
Se define a (2.1.2), como la ecuación de estado, y donde x es el estado y u es la
entrada. Algunas veces se asocia a (2.1.2) con una ecuación de salida:
y = h(t , x, u ).
(2.1.3)
Esta salida se compone de variables de interés particular en el análisis del sistema
dinámico, tales como variables que pueden ser medidas físicamente o variables que se
requiere que se comporten de una manera específica.
Un caso especial de (2.1.2) aparece cuando la función f no depende explícitamente de
t; esto es,
x = f ( x, u ).
(2.1.4)
En tal caso se dice que el sistema es autónomo o invariante en el tiempo. La respuesta
de un sistema autónomo es invariante a desplazamientos en el tiempo, puesto que al
cambiar la variable t por τ = t − a , el lado derecho de la ecuación de estado no cambia. Si
el sistema no es autónomo, entonces es llamado no autónomo o variante en el tiempo. En
este trabajo se contemplan únicamente sistemas autónomos.
5
Un concepto importante relacionado con la ecuación de estado es el concepto de
punto de equilibrio. Se dice que un punto x = x ∗ en el espacio de estado es un punto de
equilibrio de (2.1.4) si tiene la propiedad de que siempre que el estado del sistema tenga
una condición inicial en el punto x ∗ , este permanecerá en el mismo punto x ∗ , para todo
el tiempo futuro. Para los sistemas autónomos (2.1.4), los puntos de equilibrio son las
raíces reales de la ecuación [9]:
f ( x, 0) = 0 .
2.1.1 Sistemas Lineales y No Lineales
Los sistemas dinámicos se dividen en dos grandes grupos: los sistemas lineales y los
sistemas no lineales. Los sistemas lineales tienen la siguiente representación en espacio
x = Ax + Bu
de estado:
(2.1.5)
y = Cx + Du ,
donde x ∈
n
y A , B , C y D son matrices constantes de dimensión apropiada. Se
considera un sistema lineal a aquel sistema que cumpla con el principio de superposición,
es decir, si:
f ( x + y ) = f ( x) + f ( y )
f (α x) = α f ( x), ∀α
La solución a través del tiempo de un sistema no lineal tiene una dinámica más
compleja que la de los sistemas lineales, por esto, no puede ser expresada con
operaciones lineales para describirla. A diferencia de los sistemas lineales, los sistemas
no lineales no se pueden separar en partes y resolver cada parte separadamente, es decir,
en estos sistemas no es aplicable el principio de superposición. La mayoría de los
sistemas que encontramos en la naturaleza son sistemas no lineales. En los sistemas no
lineales se pueden presentar los siguientes fenómenos [9]:
•
Múltiples puntos de equilibrio
•
Ciclos límite
6
•
Subarmónicos, armónicos y oscilaciones cuasi-periódicas
•
Caos
2.2 Atractor
Un atractor es una región en el espacio de estado hacia donde todas las trayectorias
de un sistema convergen. De manera formal, un atractor se define como un conjunto
invariante M con las siguientes propiedades [9]:
1. Cualquier trayectoria x(t ) que comienza en M , permanece en M todo el
tiempo. ∀x(0) ∈ M → x(t ) ∈ M , ∀t ≥ 0 .
2. M atrae un conjunto abierto de condiciones iniciales: existe un conjunto abierto
U que contiene a M tal que si x(0) ∈U , entonces la distancia de x(t ) a M
tiende a cero cuando t → ∞ . Esto quiere decir que M atrae todas las trayectorias
que comienzan lo suficientemente cerca de él. x(0) ∈ U → lim dist( x(t), A ) = 0 .
t →∞
3. M es mínimo: no existe un subconjunto de M que cumpla las condiciones 1 y 2.
Un punto de equilibrio y un ciclo limite estable son dos ejemplo de atractores. Existen
atractores de diversas formas geométricas. Cuando estas formas geométricas son
complejas (o el movimiento dentro de ellas es complejo), se dice que el atractor es
extraño.
Un punto de equilibrio es un punto en el espacio de estado hacia donde todas las
trayectorias que comienzan en una región cercana a este convergen. Un ciclo limite
estable es una secuencia de estados que se repite periódicamente en el espacio de estado y
hacia donde las trayectorias que comienzan en una región cercana a este son atraídas.
2.3 Caos
Un sistema caótico es un sistema determinista donde las trayectorias de los estados no
presentan periodicidad, es altamente sensible a las condiciones iniciales, aparenta tener
soluciones aleatorias y sus soluciones son acotadas [29]. Alta sensibilidad a las
condiciones iniciales significa que hasta las más pequeñas diferencias entre condiciones
7
iniciales producen soluciones en el tiempo totalmente diferentes. A pesar de que un
sistema caótico es determinista, no se puede predecir su solución a través del tiempo,
debido a que ninguna medición real de las condiciones iniciales es infinitamente precisa,
puesto que intrínsecamente llevan una incertidumbre. Entonces esta incertidumbre en las
condiciones iniciales hace que los sistemas caóticos sean impredecibles. Es importante
señalar que los sistemas caóticos exhiben un comportamiento caótico solamente para un
rango acotado de valores de parámetros.
Es de gran importancia teórica que un comportamiento caótico no puede existir en
sistemas autónomos de menos de tres dimensiones. La justificación de esto esta dada por
el Teorema de Poincaré-Bendixson que dice lo siguiente [29]:
Considérese un sistema de dos dimensiones
x = f (x)
donde f :
2
→
2
es continuamente diferenciable en D ⊂
(2.3.1)
2
, y se asume que:
1. D es una región acotada y cerrada que no contiene puntos de equilibrio de
x = f (x) .
2. Existe una trayectoria R que comienza en D y permanece en D para todo el
tiempo futuro.
Entonces R es una órbita cerrada, o converge a una órbita cerrada cuando t → ∞ .
Este teorema predice que en dos dimensiones, una trayectoria que esta acotada por
una región cerrada que no contiene puntos de equilibrio debe eventualmente aproximarse
a un ciclo límite. En sistemas de orden mayor, las nuevas dimensiones añaden un grado
extra de libertad que permite que las trayectorias nunca se asienten en una órbita cerrada.
2.3.1 Atractor Caótico
Un atractor es informalmente conocido como extraño si tiene dimensión no entera o
si la dinámica dentro del atractor es caótica [22]. Esto implica que es posible que un
8
atractor sea extraño pero no caótico. El termino atractor caótico se utiliza para enfatizar la
propiedad de la dinámica del atractor (altamente sensible a las condiciones iniciales). Un
atractor caótico es topológicamente distinto a una orbita periódica o a un ciclo limite. Las
soluciones de un sistema caótico con dos condiciones iniciales cercanas divergen
exponencialmente dentro del atractor caótico.
Mientras todos los atractores caóticos son extraños, no todos los atractores extraños
son caóticos [5].
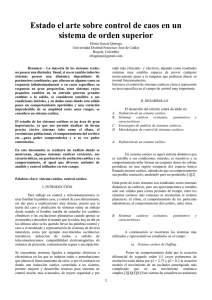
El sistema de Lorenz es el ejemplo clásico de los sistemas caóticos. Este sistema fue
presentado por Edward Lorenz en 1963 como un modelo para la turbulencia atmosférica.
Desde la publicación en donde Lorenz presentó su sistema, han sido encontradas
ecuaciones similares en una gran variedad de sistemas. Considere el siguiente sistema de
ecuaciones no lineales:
x1 = σ ( x2 − x1 );
x2 = rx1 − x2 − x1 x3 ;
(2.3.2)
x3 = x1 x2 − bx3 ;
donde σ , r , b > 0. El conjunto de valores de parámetros que fueron considerados
originalmente por Lorenz son: σ = 10 , b = 8 / 3 y r = 28 . La Figura 2.3 (a) muestra el
atractor de caótico de Lorenz en tres dimensiones de una trayectoria empezando en una
condición inicial seleccionada en forma aleatoria, mientras que la Figura 2.3 (b) muestra
una proyección de la misma trayectoria en el plano x1 − x2 . Se puede observar en ambas
figuras, que el comportamiento de la trayectoria sigue un movimiento recurrente, sin
llegar a ser periódico, cambiante entre dos superficies.
Este conjunto es llamado un atractor caótico, y las dos superficies que juntas
asemejan un par de “alas de mariposa”, son mucho mas complicadas de lo aparentan en
esta figura.
9
45
40
45
35
40
35
30
25
x2
x3
30
20
25
15
20
10
5
15
-20
0
20
15
x2
10
5
0
-5
-10
-15
10
5
-20
x1
-15
-10
-5
0
x
5
10
15
20
1
Figura 2.3. (a) El atractor caótico de Lorenz en tres dimensiones;
(b) Proyección de dos dimensiones de la trayectoria del sistema de Lorenz.
2.4 Ecuación Diferencial con Retardo
Una ecuación diferencial con retardo es similar a una ecuación diferencial ordinaria,
pero su evolución envuelve valores pasados de las variables de estado. Por lo tanto la
solución de las ecuaciones diferenciales con retardo requiere del conocimiento no
solamente del valor del estado actual sino también de uno o más de los valores de estados
pasados del sistema en un tiempo específico.
x = f ( x(t − τ 1 ),..., x(t − τ m ))
(2.4.1)
donde τ j es un valor positivo de retardo, o en caso de no existir el retardo el valor es
cero.
Aun las ecuaciones diferenciales con retardo más simples pueden presentar
comportamientos muy diferentes a los que presenta una ecuación diferencial ordinaria,
por ejemplo, una ecuación diferencial lineal con retardo puede presentar oscilaciones
mientras que la ecuación diferencial lineal ordinaria equivalente, es decir, sin el retardo,
nunca tiene soluciones oscilantes.
10
2.5 Función Racional
Una función racional es el cociente de dos polinomios. Entonces r es racional si, para
todo x ∈
n
en su dominio,
r ( x) =
p ( x)
,
q( x)
(2.5.1)
en donde p( x) y q( x) son polinomios. El dominio de un polinomio es
dominio de una función racional consta de todo el espacio
n
n
, pero el
excepto los ceros del
polinomio que esta en el denominador [30].
2.6 Función Suave
Una función f :
n
→
m
se dice que es suave o continuamente diferenciable en el
punto x0 si las derivadas parciales ∂f i / ∂x j existen y son continuas en x0 para 1 ≤ i ≤ m y
1 ≤ j ≤ n . Una función f es continuamente diferenciable en el conjunto S , si es
continuamente diferenciable para cada punto de S [9].
2.7 Mapeo
Un mapeo es sinónimo de función, es decir, es una correspondencia que asigna a cada
elemento x de D un elemento único y de I . Su notación es
f :D→I ,
(2.7.1)
significa que f es una función de D a I . El elemento y de I es el valor de f en x y
se denota por f ( x) . El conjunto D se llama dominio de la función. El contradominio o
imagen de f es el subconjunto de I que consta de todos los valores posibles de f ( x)
para x en D . Cabe señalar que a elementos diferentes de D les puede corresponder un
mismo elemento en I , pero no se puede asociar un elemento del dominio a más de un
elemento de la imagen [30].
Como ejemplo, sea f una función con dominio en
en
tal que f ( x) = x 2 para todo x
. Por definición, el contradominio de f consta de todos los números de la forma
11
f ( x) = x 2 , para x en
. Como el cuadrado de cualquier número real es no negativo, el
contradominio está contenido en el conjunto de todos los números reales no negativos. El
dominio son todos los números reales, como se aprecia números con el mismo valor
absoluto en el dominio le corresponden el mismo valor en el contradominio. Un ejemplo
es f (3) = f (−3) = 9 .
2.8 Campo Vectorial
Un mapeo f : D →
n
, donde D ⊂
n
es su dominio, se dice que es un campo
vectorial en D . Un campo vectorial se representa por un vector columna de dimensión n
[9].
2.9 Difeomorfismo
Una función f : D ⊂
n
→
n
se dice que es un difeomorfismo en D , o un
difeomorfismo local, sí [14]:
1. Es continuamente diferenciable en D
2. Su inversa f −1 , definida por f −1 ( f ( x)) = x , ∀x ∈ D , existe y es continuamente
diferenciable.
2.10 Derivada de Lie
Sea h : D →
y f :D→
n
. La derivada de Lie de una función suave h( x) con
respecto a un campo vectorial f ( x) , se escribe como L f h , y es definida por [9]:
T
⎛ ∂h ⎞
L f h( x) = ⎜ ⎟ f ( x),
⎝ ∂x ⎠
(2.10.1)
L0f h( x) = h( x),
⎛ ∂ ( Lif−1h( x) ) ⎞
i
i −1
⎟ f ( x), i > 1.
L f h( x) = L f ( L f h( x)) = ⎜
⎜
⎟
∂x
⎝
⎠
T
12
En la Figura 2.10 se muestra un diagrama esquemático para ilustrar el cálculo de la
derivada de Lie, donde x0 y x1 , son dos puntos en el espacio de estado con x ∈
n
.
Como se observa, en cada punto de la curva descrita por la función h( x) existe un vector
tangente. Este vector esta definido por ∂h / ∂x . De la misma forma en cada punto existe
otro vector debido al campo vectorial f ( x) . La derivada de Lie se calcula llevando a
cabo un producto escalar de estos dos vectores. Lo que se obtiene al final es la longitud
de la proyección del vector ∂h / ∂x en la dirección del vector f ( x) , situando a estos dos
vectores en un punto determinado x .
Figura 2.10. Esquema ilustrativo de la derivada de Lie.
13
Capítulo 3
Diseño de Anticontroladores de Retardo
En este capítulo se realiza el diseño de anticontroladores de caos a través de
retroalimentación de retardo para sistemas no lineales. Se realizaron ocho diseños de
anticontrol utilizando siete sistemas diferentes. Para este propósito se tomaron los
siguientes sistemas: el sistemas de Lorenz [13], en el cual se realizó el diseño de
anticontrol tomando como parámetro de control a dos de sus parámetros en forma
separada, el sistema de ecuaciones I [24], el sistema de Rössler [20], el sistema
Modificado de Lorenz [15], el sistema de Liu [12], el sistema de Rucklidge [16] y el
sistema de Rand [21].
Todos lo sistemas son de tres dimensiones, excepto el sistema I, el cual es de dos
dimensiones, este sistema se consideró para demostrar que el método de anticontrol
puede llevar a un sistema no caótico a presentar caos y a una caotificación en forma
global. Además para mostrar la eficacia del método en sistemas no polinomiales, tal
como lo es el sistema I. Los demás sistemas fueron consideraron debido a que, como se
observa mas adelante en este capítulo, se encontró que el grado relativo (número de veces
que se tiene que derivar la salida del sistema para que la entrada del sistema aparezca en
forma explícita en la salida), entre estos y la salida propuesta es exactamente igual a la
dimensión del sistema.
3.1 Preliminar al Diseño de Anticontrol de Retardo
En [36] se sugiere un método de caotificación para sistemas lineales estables y su
aplicación a sistemas no lineales. Estos sistemas pueden tener puntos de equilibrio
estables, pueden presentar ciclos límites estables o pueden ser sistemas caóticos. Este
método permite crear caos en sistemas que son originalmente no caóticos o incrementar
14
el rango de valores de los parámetros del sistema considerado para los cuales el sistema
permanece caótico. El método expuesto en [36] considera una ecuación diferencial
ordinaria lineal invariante en el tiempo:
y ( n ) (t ) + α n −1 y ( n −1) (t ) + ... + α1 y (1) (t ) + α 0 y (t ) = β 0u (t )
(3.1.1)
donde u (t ) y y (t ) son la entrada y la salida respectivamente, {α i }in=−01 y β 0 son constantes
con α 0 β 0 ≠ 0 , y s n + α n −1s n −1 + ... + α1s + α 0 es un polinomio estable Hurwitz (todas sus
raíces tienen parte real negativa). Se busca una entrada de la forma u (t ) = w( y(t − τ )) ,
donde w es una función continua y τ > 0 es un retardo, satisfaciendo u (t ) ≤ ε , para
toda t ≥ 0 , para una amplitud especificada ε > 0 , tal que la salida y (t ) del sistema sea
caótica desde un punto de vista matemático [10]. La solución de la ecuación (3.1.1) es
acotada para cualquier condición inicial acotada y se calcula iterativamente en cada
intervalo de tiempo τ , (mτ , (m + 1)τ ] para m = 0,1,... . Se denota y (t ) = y (mτ + tˆ) para
t = mτ + tˆ, tˆ ∈ (0,τ ] . Existen mapeos caóticos bien conocidos como el mapeo Logístico, el
mapeo de Hénon, el mapeo de Baker, etc. [11], que pueden ser usados para construir la
retroalimentación con retardo w(⋅) , que llevará a (3.1.1) a ser caótico. El mapeo:
yk +1 =
β0
w( yk ) = ε 0 sin(ξ yk )
α0
(3.1.2)
es caótico [36] para cualquier valor ε 0 diferente de cero, el cual puede ser
arbitrariamente pequeño, siempre y cuando el valor de ξ sea lo suficientemente grande.
En otras palabras, una amplitud pequeña es compensada por una oscilación alta. Entonces
una posible elección de w(⋅) es [36]:
u (t ) = w( y (t − τ )) = ε sin(ξ y (t − τ ))
(3.1.3)
donde ε = ε 0α 0 / β 0 .
15
En el mapeo (3.1.2), para cualquier ε 0 ≠ 0 , el origen es un punto de equilibrio
asintóticamente estable, si se cumple la siguiente condición: 0 < ξ < ε 0 . Cuando se
incrementa el valor de ξ y pasa sobre el valor de ε 0 , el mapeo (3.1.2) tiene un par de
puntos de equilibrio conjugados, diferentes de cero, asintóticamente estables en forma
local, estos son: y + > 0 y y − = − y + < 0 . Si el valor de ξ continua incrementándose, cada
punto de equilibrio se transforma en una cascada de doblamiento de periodo, que se
convertirán en atractores caóticos. Con un incremento más grande del valor del parámetro
ξ , cada atractor caótico crece en tamaño. Finalmente, en el punto crítico ξ = π / ε 0 , los
dos atractores se convierten en uno solo [36].
3.1.1 Linealización
Considérese una ecuación diferencial de una entrada y una salida (SISO) no lineal
continua en el tiempo de la forma:
y ( n ) = φ ( y ) + ψ ( y )u
(3.1.4)
donde φ y ψ son funciones no lineales suaves de Y = [ y, y,..., y ( n −1) ]T . Supóngase que
Y = 0 es un punto de equilibrio asintóticamente estable del sistema sin controlar (con
u (t ) = 0 ) y que ψ (0) ≠ 0 .
Un método para linealizar el sistema es a través de linealización exacta por
retroalimentación. Si la entrada del sistema es
1
(−φ ( y ) − γ n −1 y (1) −
ψ ( y)
− γ 1 y (1) − γ 0 y + v(t ))
(3.1.5)
donde {γ i }i =0 son n constantes con γ 0 ≠ 0 , tal que s n + γ n −1 s n −1 +
+ γ 1 s + γ 0 es un
u=
n −1
polinomio Hurwitz estable. Entonces, la ecuación (3.1.4) se convierte en
y ( n ) + γ n −1 y ( n −1) +
+ γ 1 y (1) + γ 0 y = v (t )
(3.1.6)
que es de la misma forma de (3.1.1), de esta forma el controlador u con
v(t ) = ε sin(ξ y (t − τ )) puede generar o mantener el caos en un rango de parámetros más
amplio para el sistema (3.1.4).
16
3.2 Metodología para el Diseño de Anticontrol de Retardo
Sea el sistema no lineal:
x = f ( x) + g ( x)uˆ
donde x ∈
n
(3.2.1)
y û es uno de los parámetros constantes del sistema. Sea:
y = h( x )
(3.2.2)
la salida del sistema (3.2.1), siendo esta salida una función escalar suave, que satisface
h(0) = 0 .
El grado relativo ρ de (3.2.1) y su salida y = h( x) , es exactamente igual al número
de veces que se tiene que derivar la salida del sistema, tal que la entrada del sistema u
aparezca explícitamente en el término y ( ρ ) (t ) [11].
Sea H ( x) = ( h( x), L f h( x),..., Lnf−1h( x) ) .
T
Sea el sistema de ecuaciones algebraicas H ( z ) = w , en el espacio complejo,
z, w∈
n
.
Supóngase que
H
satisface la siguiente condición llamada Condición de
Invertibilidad: existe un polinomio de n variables η ( w) para el cual el sistema
H ( z ) = w* tiene una única solución real para cualquier w* , tal que η ( w* ) ≠ 0 [26].
Entonces, si el grado relativo es igual a n , el sistema (3.2.1) puede ser descrito por
una ecuación diferencial orden n de la forma de (3.1.4). Si el sistema y su salida
y = h( x) tienen grado relativo ρ (h) = n , entonces:
17
⎛ h( x ) ⎞
⎜
⎟
⎜ L f h( x ) ⎟
2
y = H ( x ) = ⎜ L f h( x ) ⎟
⎜
⎟
⎜
⎟
⎜ Lnf−1h( x) ⎟
⎝
⎠
(3.2.3)
T
Donde: y = ⎡⎣ y, y,..., y ( n −1) ⎤⎦ . Ver Apéndice A.
De las proposiciones establecidas en [27]:
1. Asumiendo que ρ = n , se establece que el difeomorfismo H mapea a (3.2.1) en una
ecuación de la forma de (3.1.4) que puede ser escrita en su representación de variables
de estado denominada forma normal racional en [26], como se muestra a continuación:
y1 = y2
y2 = y3
(3.2.4)
ˆ 2 ( y )q2−1 ( y ).
yn = α ( y ) + β ( y )uˆ = p1 ( y )q1−1 ( y ) + up
donde y ∈
n
, α ( y ) , β ( y ) , ps ( y ) y qs ( y ) , son polinomios reales con s = 1, 2 .
Cabe resaltar que los términos q1 , q2 aparecerán cuando α ( y ) y β ( y ) sean
funciones racionales.
2. Sean ρ (h) = n y η ( y ) = p2 ( y )q1 ( y )q2 ( y ) un polinomio. Supóngase que existe un
punto de equilibrio de x* del sistema (3.2.1), con û un parámetro fijo del sistema (3.2.1),
tal que y* = H ( x* ) ∈ C (η ) y C (η ) un componente conectado del conjunto
n
− η −1 (0) . Si
D es el dominio de H −1 (C (η )) , con x* ∈ D , entonces existe un anticontrolador de la
forma:
u (t ) = uˆ + δ u (t , x(t ))
(3.2.5)
que lleva al sistema a la forma (3.1.1) y hace que (3.2.1) exhiba caos en D donde
18
⎛
n −1
⎞
⎝
s=0
⎠
δ u = ⎜ v − p1 ( H ( x (t ) ) ) q1−1 ( H ( x (t ) ) ) − ∑ γ s ( Lsf h ( x (t ) ) − Lsf h ( x* ) ) ⎟ p 2−1 ( H ( x (t ) ) ) q 2 ( H ( x (t ) ) ) − uˆ
(
)
con: v = ε sin ξ ( h ( x(t − τ ) ) − h( x* ) ) .
(3.2.6)
El término δ u es una perturbación que se le introduce al valor constante del
parámetro û . Los términos h( x* ) y Lsf h( x* ) fueron introducidos para hacer un
desplazamiento hacia un punto diferente del origen, y ubicar la dinámica del atractor en
el punto de equilibrio x* . Siguiendo el argumento expuesto en [36], es posible tomar a v
como un controlador y al término δ u como una transformación de coordenadas.
El dominio de la caotificación se determinará al calcular el conjunto singular η −1 (0) ,
el cual es descrito por los ceros de los términos q1 , q2 y p2 .
19
3.3 Diseño de Anticontroladores por retroalimentación de
retardo
En esta sección se muestra el diseño de los anticontroladores para los sistemas
descritos en la Tabla 3.1.
Tabla 3.1. Lista de sistemas y parámetros
utilizados para el diseño de anticontroladores.
Sistema
Parámetro
Sistema de Lorenz
û = r
Sistema I
û = B
Sistema de Rössler
û = b
Sistema de Lorenz
û = b
Sistema Modificado
û = κ
de Lorenz
Sistema de Liu
û = b
Sistema de Rucklidge
û = b
Sistema de Rand
û = a
3.3.1 Sistema de Lorenz usando r como parámetro de control
Para el primer diseño de anticontrol considérese el sistema de Lorenz [13]:
x1 = −σ x1 + σ x2
x2 = rx1 − x2 − x1 x3
(3.3.1)
x3 = −bx3 + x1 x2
con σ , b > 0 , r > 1 y b ≠ 2σ . Como f denótese el campo vectorial del sistema de
Lorenz. Se toma a r como el parámetro de control y se define
h( x) = x12 / 2 − σx3 .
(3.3.2)
En este caso [36], ρ (h) = 3 . . Calculamos:
L f h = −σ x12 + σ bx3 ;
(3.3.3)
L2f h = 2σ 2 x12 + (−2σ 2 + σ b) x1 x2 − σ b 2 x3 .
20
Despejando los términos en x se tiene que:
x12 = 2(b − 2σ ) −1 ( L f h + bh);
x3 = σ −1 (b − 2σ ) −1 ( L f h + 2σ h);
(3.3.4)
x1 x2 = σ −1 (b − 2σ ) −1 ( L2f h + 2bσ h + (2σ + b) L f h).
Ahora aplicamos L f a la expresión de L2f h :
L3f h + (2σ + b) L2f h + 2σ bL f h = −σ (σ + 1)(b − 2σ ) x1 x2 + rσ (b − 2σ ) x1 +
− σ (b − 2σ ) x12 x3 + σ 2 (b − 2σ ) x22 .
La expresión final de L3f h , se muestra a continuación:
L3f h = {2σb(2σ − b) L f h + (4σ 2 − b 2 ) L2f h} + σ (b − 2σ )(−(σ + 1)) x1 x2 +
+ σx22 + rx12 − x12 x3 ) =
= −(2bσL f h + (2σ + b) L2f h) − (σ + 1)( L2f h) + 2bσh + (2σ + b) L f h +
+ 2rσ (hb + L f h) − 2(b − 2σ ) −1 ( L f h + hb)(2σh + L f h) +
+ (b − 2σ )( L2f h + 2bσh + (2σ + b) L f h) 2 ( L f h + bh) −2 / 4 .
Usando coordenadas y, y1 = h( x); y2 = L f h( x ) ; y3 = L2f h( x) se obtiene la expresión
en forma normal racional:
y1 = y2
y2 = y3
y3 = − ( 2bσ y2 + (2σ + b) y3 ) − (σ + 1) y3 + 2bσ y1 + (2σ + b) y2 +
(3.3.5)
+2rσ ( y1b + y2 ) − 2(2σ + b) ( y2 + y1b)(2σ y1 + y2 ) +
−1
+ (b − 2σ ) ( y3 + 2bσ y1 + (2σ + b) y1 ) ( y2 + by1 ) −2 / 4.
2
21
Se denota:
p11 ( y ) = −2bσ (σ + 1) y1 − (3bσ + 2σ 2 + b + 2σ ) y2 − (b + 3σ + 1) y3 +
−2(by1 + y2 )(2σ y1 + y2 )(b − 2σ ) −1 ;
p12 ( y ) = (b − 2σ )(2bσ y1 + (b + 2σ ) y2 + y3 ) 2 ;
(3.3.6)
q1 ( y ) = 4(by1 + y2 ) ;
2
p2 ( y ) = 2σ ( y2 + by1 ).
El sistema expresado usando los polinomios definidos, queda de la forma siguiente:
y1 = y2
y2 = y3
y3 = p11 ( y ) + p12 ( y )q1−1 ( y ) + rp2 ( y ).
La ecuación del anticontrolador tiene la forma:
p11 ( y ) + p12 ( y )q1−1 ( y ) + (r + δ r ) p2 ( y ) + ∑ γ s ( ys +1 − y( s +1)* ) = v = ε sin (ξ ( y1 (t − τ ) − y1* ) ) .
2
s =0
(3.3.7)
Entonces la ecuación de δ r en coordenadas x , tiene la forma:
⎛
2
⎞
⎝
s =0
⎠
δ r = ⎜ v − ∑ γ s ( Lsf h( x) − Lsf h( x* ) ) − p11 ( H ( x) ) − p12 ( H ( x) ) q1−1 ( H ( x) ) ⎟ p2−1 ( H ( x) ) − r ,
(
)
con v = ε sin ξ ( h ( x(t − τ ) ) − h( x* ) ) .
(3.3.8)
Los polinomios en coordenadas x :
(
p11 ( H ( x) ) = ( 2σ 2 − σ 2b − σ b + 6σ 3 − σ b 2 ) x1 x2 + ( 4σ 3 + 4σ 2b − σ b 2 ) ( b − 2σ )
+σ b3 x3 − 4σ 3 x12 ;
−1
)x x +
2
1 3
(3.3.9)
p12 ( H ( x) ) = (12σ 4b − 6σ 3b 2 + σ 2b3 − 8σ 5 ) x12 x22 ;
q1 ( H ( x) ) = ( b 2 − 4σ b + 4σ 2 ) x14 ;
22
p2 ( H ( x) ) = (σ b − 2σ 2 ) x12 .
El conjunto singular está definido por los ceros de los términos q1 y p2 . En
coordenadas y , la región singular esta definida por:
by1 + y2 = 0
Realizando la transformación a coordenadas x , se tiene que la singularidad esta dada
x1 = 0
por:
Este diseño de anticontrol con retroalimentación de retardo para el sistema de Lorenz
usando a r como parámetro de control, tiene como dominio los semiespacios x1 > 0 ó
x1 < 0 .
El sistema de Lorenz tiene los siguientes puntos de equilibrio en :
Z 0 = 0; Z ± = (± b(r − 1) ,± b(r − 1) , r − 1).
Como Z 0 está contenido en el plano x1 = 0 , se selecciona uno de los otros puntos de
equilibrio,
por
Z + ∈ {x1 > 0} ,
ejemplo
entonces
para
este
caso
x* = ( b(r − 1), b(r − 1), r − 1) . El término del anticontrolador v queda de la siguiente
forma:
⎛ ⎛1
2
⎛b
⎞⎞⎞
v = ε sin ⎜ ξ ⎜ ( x1 (t − τ ) ) − σ x3 (t − τ ) − ( r − 1) ⎜ − σ ⎟ ⎟ ⎟ .
⎝2
⎠⎠⎠
⎝ ⎝2
(3.3.10)
Así, el sistema de Lorenz restringido para cualquier dominio abierto D ⊃ Z + dentro
del
semiespacio
x1 > 0 ,
exhibe
caos
para
un
área
de
parámetros
(1 < r < rH ≈ 24.74; b ≠ −2σ ) más grande, debido a la aplicación de una perturbación al
parámetro r , que se convierte en
r (t ) = r + δr (t , x(t ))
23
para una τ > 0 lo suficientemente grande. Las simulaciones numéricas de todos los
diseños se encuentran en el capítulo 4.
3.3.2 Sistema I usando B como parámetro de control
En este diseño de anticontrol, considérense las ecuaciones del sistema I [24]:
x1 = − x1 + Da(1 − x1 ) exp( x2 )
x2 = − x2 + BDa(1 − x1 ) exp x2 − β x2 .
(3.3.11)
Este sistema no es de tres dimensiones pero es considerado para mostrar la
posibilidad de crear caos en un sistema no caótico, además de mostrar la posibilidad de
que el método es aplicable en sistemas no polinomiales y como se verá mas adelante, al
aplicar este diseño de anticontrol, no se presentan regiones singulares, por lo que se
obtiene una caotificación global. Los parámetros básicos son β = 3 y Da tomado como
constante, B = 16.2 [24] es seleccionado como el parámetro de control.
Tomando:
h( x) = − Bx1 + x2 ,
(3.3.12)
se calcula:
L f h = − Bx1 − ( β + 1) x2 ;
(3.3.13)
L2f h = −( β 2 + 2β + 1) x2 + B( x1 + βDa(1 − x1 ) exp( x2 )).
Resolviendo las ecuaciones (3.3.13) para x1 y x2 , se obtiene la siguiente
transformación:
x1 = B −1h +
x2 =
Lf h + h
Bβ
Lf h + h
β
;
(3.3.14)
.
24
En coordenadas y , se define:
y1 = h;
y2 = L f h.
Se obtiende la forma normal racional:
y1 = y2
⎛y +y ⎞
y2 = −( β + 2) y2 − ( β + 1) y1 − Da exp ⎜ 2 1 ⎟ ( ( β + 1) y1 − y2 − Bβ ) .
⎝ β ⎠
(3.3.15)
La ecuación del anticontrolador tiene la forma:
1
p11 ( y ) + p12 ( y )q1 ( y ) + ( B + δ B ) p2 ( y ) + ∑ γ s ys +1 = v = ε sin (ξ y1 ( t − τ ) ) .
(3.3.16)
s =0
Se define a los polinomios como sigue:
⎛y +y ⎞
p11 ( y ) = −( β + 1) y2 − ( β + 1) y1 − Da exp ⎜ 2 1 ⎟ ( ( β + 1) y1 + y2 ) ;
⎝ β ⎠
p12 ( y ) = 0;
q1 ( y ) = 1;
(3.3.17)
⎛y +y ⎞
p2 ( y ) = β Da exp ⎜ 2 1 ⎟ .
⎝ β ⎠
Entonces la ecuación para δ B es:
1
δ B = (v − ∑ γ s Lsf h( x) − p11 ( H ( x)) − p12 ( H ( x))q1−1 ( H ( x))) p2−1 ( H ( x)) − B ,
s =0
con v = ε sin (ξ h( x(t − τ )) ) .
(3.3.18)
25
A continuación se muestran los polinomios en coordenadas x :
p11 ( H ( x)) = −( β 2 + 2β + 1) x2 + Bx1 (1 − Daβ exp( x2 ));
p12 ( H ( x)) = 0;
(3.3.19)
q1 ( H ( x)) = 1;
p2 ( H ( x)) = β Da exp( x2 ).
El conjunto singular es definido por los ceros de los términos q1 y p2 . Como se
observa q1 = 1 no es cero. El término p2 evidentemente no puede ser cero al ser una
función exponencial tanto en coordenadas y como en coordenadas x . Entonces
concluimos que no existe ninguna singularidad. Por lo tanto es posible obtener
caotificación en forma global en este caso. En este diseño no se realizo ningún
desplazamiento hacia a un punto de equilibrio, por lo tanto el atractor obtenido estará
situado en el origen.
3.3.3 Sistema de Rössler usando b como parámetro de control
En este tercer diseño, consideramos las ecuaciones del sistema de Rössler, [20]:
x1 = − ( x3 + x2 )
x2 = x1 + ax2
(3.3.20)
x3 = b + x1 x3 − cx3 .
Se define:
h( x) = x2 ,
(3.3.21)
y b como el parámetro de control, calculamos las derivadas de Lie de h con respecto al
sistema de Rössler f :
L f h = x1 + ax2 ;
L2f h = − x3 − x2 + ax1 + a 2 x2 ;
(3.3.22)
L3f h = −ax3 − 2ax2 − x1 + a 2 x1 + a 3 x2 − b − x1 x3 + cx3 .
26
Resolviendo las ecuaciones (3.3.22) con respecto a x se tiene que:
x1 = L f h − ah;
x2 = h;
(3.3.23)
x3 = − L2f h − h + aL f h.
En coordenadas y , se hace:
y1 = h;
y2 = L f h;
y3 = L2f h.
La forma normal racional:
(3.3.24)
y1 = y2
y2 = y3
y3 = − ay3 − y2 − b + y2 y3 + y1 y2 − ay22 − ay1 y3 − ay12 + a 2 y1 y2 − cy3 − cy1 + acy2 .
La ecuación para el anticontrolador es:
p11 ( y ) − (b + δ b) p2 ( y ) + ∑ γ s ( ys +1 − y( s +1)* ) = v = ε sin(ξ ( y1 (t − τ ) − y1* )).
2
(3.3.25)
s =0
Definiendo a los polinomios como se muestra a continuación:
(3.3.26)
p11 ( y ) = −ay3 − y2 + y2 y3 + y1 y2 − ay22 − ay1 y3 − ay12 + a 2 y1 y2 − cy3 − cy1 + acy2 ;
p2 ( y ) = 1.
27
De esta manera llegamos a la formula de δ b en coordenadas x:
(3.3.27)
⎛
2
⎞
⎝
s =0
⎠
δ b = ⎜ v − ∑ γ s ( Lsf h( x) − Lsf h( x* ) ) − p11 ( H ( x) ) ⎟ ⋅ ( − p2−1 ( H ( x) ) ) − b ,
con v = ε sin (ξ ( h( x(t − τ )) − h( x* ) ) ) .
A continuación se muestran los polinomios en coordenadas x :
p11 ( H ( x)) = −ax3 − 2ax2 − x1 + a 2 x1 + a 3 x2 − x1 x3 + cx3 ;
p2 ( H ( x)) = 1.
(3.3.28)
El sistema de Rössler presenta equilibrio en:
⎛ c ± c 2 − 4ab −c ∓ c 2 − 4ab c ± c 2 − 4ab ⎞
Z± = ⎜
,
,
⎟,
⎜
⎟
2
2
a
2
a
⎝
⎠
entonces escogiendo uno de los puntos de equilibrio, por ejemplo Z − , se tiene que el
término v queda de la siguiente forma:
⎛ ⎛
⎛ −c + c 2 − 4ab ⎞ ⎞ ⎞
v = ε sin ⎜ ξ ⎜ x2 (t − τ ) − ⎜
⎟⎟⎟ .
⎜
⎟⎟⎟
⎜ ⎜
2
a
⎝
⎠⎠⎠
⎝ ⎝
(3.3.29)
El conjunto singular está definido por el cero del término p2 . Puesto que p2 = 1 , en
este caso no existen regiones singulares para este diseño, logrando una caotificación
global.
28
3.3.4 Sistema de Lorenz usando b como parámetro de control
Para este diseño de anticontrol consideramos al sistema de Lorenz [13]:
x1 = −σ x1 + σ x2
x2 = rx1 − x2 − x1 x3
(3.3.30)
x3 = −bx3 + x1 x2
con σ , b > 0 y r > 1 . f denota el campo vectorial del sistema de Lorenz. En este se
realizará la caotificación del sistema de Lorenz usando a b como parámetro de control.
En la sección 3.3.1 se realizó la caotificación del sistema de Lorenz usando a r como el
parámetro de control. En esta sección con:
h( x) = x1
(3.3.31)
y se obtiene:
L f h( x ) = σ ( x 2 − x1 ) ;
L2f h( x) = −σx2 + σ 2 x1 − σx2 − σx1 x3 + σrx1 ;
(3.3.32)
L3f h = x1 (−σ 3 − 2σ 2 r − σ r ) + x2 (σ 3 + σ 2 r + σ 2 + σ ) − σ 2 x3 x2 +
+ (2σ 2 + σ + σ b ) x1 x3 − σ x12 x2 .
Resolviendo para x1 , x2 y x3 se tiene la siguiente transformación:
x1 = h;
x2 = σ −1 L f h + h;
x3 =
(3.3.33)
− L2f h + h(σ r − σ ) − L f h(σ + 1)
σh
.
Usando coordenadas y, y1 = h( x); y2 = L f h( x); y3 = L2f h( x) llegamos a la forma
normal racional:
y1 = y2
y2 = y3
y3 = y3 (−1 − b − σ ) + y2 (−b − bσ ) + y1 (−bσ + bσr) +
(3.3.34)
1 2
1
σ
y3 y 2 − σy13 + y 22 +
y2 − y12 y2 .
y1
y1
y1
29
Agrupando términos para b , llegamos a la ecuación del anticontrolador, la cual esta
dada por la fórmula:
(3.3.35)
p11 ( y ) + p12 ( y ) q1−1 ( y ) + (b + δ b) p2 ( y ) + ∑ γ s ( ys +1 − y( s +1)* ) = v = ε sin (ξ ( y1 (t − τ ) − y1* ) )
2
s =0
Se definen los polinomios de la siguiente manera:
p11 ( y ) = − y3 (σ + 1) − σ y13 − y12 y2 ;
p12 ( y ) = y3 y2 + (σ + 1) y22 ;
(3.3.36)
q1 ( y ) = y1 ;
p2 ( y ) = − y3 − y2 (σ + 1) + y1 (σ r − σ ).
La ecuación para δ b esta dada por:
⎛
2
⎞
⎝
s =0
⎠
δ b = ⎜ v − ∑ γ s ( Lsf h( x) − Lsf h( x* ) ) − p11 ( H ( x) ) − p12 ( H ( x) ) q1−1 ( H ( x) ) ⎟ ⋅ p2−1 ( H ( x) ) − b ,
con v = ε sin (ξ ( h( x(t − τ ) − h( x* ) ) ) .
(3.3.37)
Los polinomios definidos en coordenadas x :
p11 ( H ( x)) = x1 (−σ 2 − σ 3 − σr − σ 2 r ) + x2 (2σ 2 + σ 3 + σ ) + x1 x3 (σ 2 + σ ) − σx12 x2 ;
p12 ( H ( x )) = x12 (−σ 2 r + σ 2 ) + x1 x2 (σ 2 r − σ 2 ) +
−σ 2 x1 x2 x3 + σ 2 x12 x3 ;
(3.3.38)
q1 ( H ( x)) = x1 ;
p2 ( H ( x)) = σx1 x3 .
El conjunto singular está definido por los ceros de los términos q1 y p2 . En
coordenadas y , la región singular esta definida por las regiones:
y1 = 0;
y1 (σ r − σ ) − y2 (1 + σ ) = y3 .
30
Realizando la transformación a coordenadas x , se tiene que la singularidad esta dada
por:
x1 x3 = 0 .
El sistema de Lorenz tiene equilibrio en
Z 0 = 0; Z ± = (± b(r − 1) ,± b(r − 1) , r − 1).
Se escoge un equilibrio fuera de x1 = 0 . Entonces escogiendo uno de los puntos de
equilibrio, por ejemplo Z + , se tiene que el término v queda de la siguiente forma:
((
))
v = ε sin ξ x1 (t − τ ) − b(r − 1) .
(3.3.39)
Así el sistema de Lorenz restringido en cualquier dominio abierto D ⊃ Z + dentro del
cuadrante x1 > 0; x3 > 0, exhibe caos para un área mayor de parámetros dada por la
retroalimentación con retardo b(t ) = b + δb(t , x(t )) ( b es reemplazada por b(t ) en el
sistema de Lorenz) utilizando una τ > 0 lo suficientemente grande.
3.3.5 Sistema Modificado de Lorenz usando κ como parámetro de
control
Aquí se toma el sistema de Lorenz modificado el cual es considerado en [15] en el
contexto del estudio cualitativo del atractor de Lorenz. Las ecuaciones del sistema
Modificado de Lorenz son:
x1 = − s ( x1 + x2 )
x2 = − x2 − sx1 x3
(3.3.40)
x3 = κ + sx1 x2 .
Escogiendo:
h( x) = x1
(3.3.41)
31
y κ como el parámetro de control. Calculando las derivadas de Lie de h con respecto al
campo vectorial del sistema Modificado de Lorenz, como se muestra a continuación:
L f h( x ) = − s ( x1 + x2 ) ;
L2f h( x) = s 2 x1 + x2 ( s 2 + s) + s 2 x1 x3 ;
(3.3.42)
L3f h = x1 (− s 3 + s 2κ ) + x2 (− s 3 − s 2 − s) − 2 s 3 x1 x3 − s 3 x2 x3 − s 2 x1 x3 + s 3 x12 x 2 .
Al resolver este sistema de ecuaciones se obtiene que:
x1 = h;
x2 =
x3 =
En
L f h + sh
−s
(3.3.43)
;
L2f h − s 2 h − s 2 (
L f h + sh
−s
s2h
) − s(
L f h + sh
−s
)
.
coordenadas y , se hace:
y1 = h( x);
y2 = L f h( x);
y3 = L2f h( x).
Se llega a la forma normal racional:
y1 = y2
y2 = y3
(3.3.44)
y3 = s2κ y1 − y3 (s + 1) +
1
( y2 y3 + sy22 + y22 ) − s2 y12 y2 − s3 y13.
y1
La ecuación del anticontrolador tiene la forma:
(3.3.45)
p11 ( y ) + p12 ( y ) q1−1 ( y ) + (κ + δκ ) p2 ( y ) + ∑ γ s ( ys +1 − y( s +1)* ) = v = ε sin (ξ ( y1 (t − τ ) − y1* ) ) .
2
s =0
32
Se definen los polinomios en coordenadas y de la forma siguiente:
p11 ( y ) = − y3 ( s + 1) − s 2 y12 y2 − s 3 y13 ;
p12 ( y ) = y2 y3 + sy22 + y22 ;
(3.3.46)
q1 ( y ) = y1 ;
p2 ( y ) = s 2 y1.
Entonces la ecuación para la perturbación δκ es:
(3.3.47)
⎛
2
⎞
⎝
s =0
⎠
δκ = ⎜ v − ∑ γ s ( Lsf h( x) − Lsf h( x* ) ) − p11 ( H ( x) ) − p12 ( H ( x) ) q1−1 ( H ( x) ) ⎟ ⋅ p2−1 ( H ( x) ) − κ ,
con v = ε sin (ξ ( h( x(t − τ ) − h( x* ) ) ) .
En coordenadas x los polinomios son:
p11 ( H ( x)) = − x1 ( s 3 + s 2 ) − x2 ( s 3 + 2 s 2 + s ) − x1 x3 ( s 3 + s 2 ) + s 3 x12 x2 ;
p12 ( H ( x)) = s 2 x12 + s 2 x1 x2 − s 3 x12 x3 − s 3 x1 x2 x3 ;
q1 ( H ( x)) = x1 ;
(3.3.48)
p2 ( H ( x)) = s 2 x1.
El conjunto singular está definido por los ceros de los términos q1 y p2 . En
coordenadas y , la región singular esta definida por las regiones:
y1 = 0 .
Realizando la transformación a coordenadas x , se tiene que la singularidad esta dada
por:
x1 = 0 .
El sistema de Modificado de Lorenz tiene equilibrio en
33
Z ± = (±
κ
s
,∓
κ 1
, ).
s s
Se selecciona un equilibrio fuera de x1 = 0 , por ejemplo Z + , se tiene que el término v
queda de la siguiente forma:
⎛ ⎛
κ ⎞⎞
v = ε sin ⎜ ξ ⎜⎜ x1 (t − τ ) −
⎟⎟ ⎟⎟ .
⎜
s
⎠⎠
⎝ ⎝
(3.3.49)
Así el sistema de Modificado de Lorenz restringido en cualquier dominio
abierto D ∋ Z + dentro del
semiespacio x1 > 0 exhibe caos para un área mayor de
parámetros dada por la retroalimentación con retardo κ (t ) = κ + δκ (t , x(t )) ( κ es
reemplazada por κ (t ) en el sistema Modificado de Lorenz) utilizando una τ > 0 lo
suficientemente grande.
3.3.6 Sistema de Liu usando b como parámetro de control
Recientemente, un nuevo sistema caótico fue propuesto, ver en [12]. Las ecuaciones
del sistema de Liu son las siguientes:
x1 = a ( x2 − x1 )
x2 = bx1 − kx1 x3
(3.3.50)
x3 = −cx3 + θ x12 .
Se elige:
h( x) = x1
(3.3.51)
y b como el parámetro de control. Enseguida calculamos las derivadas de Lie de h con
respecto al campo vectorial del sistema de Liu, como se muestra a continuación:
L f h( x ) = − a ( x2 − x1 ) ;
L2f h( x) = −a 2 x2 + a 2 x1 + abx1 − akx1 x3 ;
(3.3.52)
L3f h = x1 (−a 3 − 2a 2 b) + x2 (a 3 + a 2 b) + (2a 2 k + akc ) x1 x3 − a 2 kx2 x3 − akθx13 .
34
Resolviendo estas ecuaciones con respecto a x se obtiene:
x1 = h;
x2 = a −1 L f h + h;
x3 =
− L h − aL f h + abh
2
f
akh
(3.3.53)
.
En coordenadas y , y1 = h( x); y2 = L f h( x); y3 = L2f h( x) se obtiene la forma normal:
y1 = y2
y2 = y3
y3 =
(3.3.54)
a
1
y2 y3 − ay3 + y22 − cy3 − acy2 + abcy1 − akθ y13 .
y1
y1
La ecuación del anticontrolador queda de la siguiente forma:
(3.3.55)
p11 ( y ) + p12 ( y ) q1−1 ( y ) + (b + δ b) p2 ( y ) + ∑ γ s ( ys +1 − y( s +1)* ) = v = ε sin (ξ ( y1 (t − τ ) − y1* ) ) .
2
s =0
Definimos los polinomios en coordenadas y de la forma siguiente:
p11 ( y ) = − y3 (a + c) − acy2 − akθ y13 ;
p12 ( y ) = y2 y3 + y22 ;
(3.3.56)
q1 ( y ) = y1 ;
p2 ( y ) = acy1.
Entonces la ecuación para la perturbación δ b es:
(3.3.57)
⎛
2
⎞
⎝
s =0
⎠
δ b = ⎜ v − ∑ γ s ( Lsf h( x) − Lsf h( x* ) ) − p11 ( H ( x) ) − p12 ( H ( x) ) q1−1 ( H ( x) ) ⎟ ⋅ p2−1 ( H ( x) ) − b ,
con v = ε sin (ξ ( h( x(t − τ ) − h( x* ) ) ) .
35
En coordenadas x se tiene que los polinomios son:
p11 ( H ( x)) = a 3 x2 − a 3 x1 − a 2bx1 + a 2 kx1 x3 − abcx1 + ackx1 x3 − akθ x13 ;
p12 ( H ( x)) = − a 3 x22 + 2a 3 x1 x2 + a 2bx1 x2 − a 2 kx1 x2 x3 − a 3 x12 +
− a 2bx12 + a 2 kx12 x3 + a 2 x22 − 2a 2 x1 x2 + a 2 x12 ;
(3.3.58)
q1 ( H ( x)) = x1 ;
p2 ( H ( x)) = acx1.
El conjunto singular está definido por los ceros de los términos q1 y p2 . En
coordenadas y , la región singular esta definida por las regiones:
y1 = 0 .
Realizando la transformación a coordenadas x , se tiene que la singularidad esta dada
por:
x1 = 0 .
El sistema de Liu tiene equilibrio en
Z ± = (±
cb
cb b
,±
, ).
θk
θk k
Eligiendo un equilibrio fuera de x1 = 0 , por ejemplo Z + , se tiene que el término v
queda de la siguiente forma:
⎛ ⎛
cb ⎞ ⎞
v = ε sin ⎜ ξ ⎜⎜ x1 (t − τ ) −
⎟⎟ ⎟⎟ .
⎜
θ
k
⎠⎠
⎝ ⎝
(3.3.59)
Así el sistema de Liu restringido en cualquier dominio abierto D ∋ Z + dentro del
semiespacio x1 > 0 exhibe caos para un área mayor de parámetros dada por la
retroalimentación con retardo b(t ) = b + δ b(t , x(t )) ( b es reemplazada por b(t ) en el
sistema de Liu) utilizando una τ > 0 lo suficientemente grande.
36
3.3.7 Sistema de Rucklidge usando b como parámetro de control
Considérese las ecuaciones del sistema de Rucklidge [16]:
x1 = bx1 − ax2 − x2 x3
x2 = x1
(3.3.60)
x3 = − x3 + x22 .
con a < 0 .
Se define:
h ( x ) = x2
(3.3.61)
y b como el parámetro de control. Enseguida calculamos las derivadas de Lie de h con
respecto al campo vectorial del sistema de Rucklidge, como se muestra a continuación:
L f h( x ) = x1 ;
L2f h( x) = bx1 − abx2 − bx2 x3 − ax1 − x1 x3 − bx1 x2 + ax22 + x22 x3 ;
(3.3.62)
L3f h = x1 (b 2 − a) − abx2 − x1 x3 − bx2 x3 − x1 x3 − bx1 x2 + ax22 + x22 x3 .
Resolviendo para x1 , x2 y x3 se tiene que:
x1 = L f h;
x2 = h;
x3 =
(3.3.63)
− L h + bL f h − ah
2
f
h
.
En coordenadas y , y1 = h( x); y2 = L f h( x); y3 = L2f h( x) se obtiene la forma normal
racional:
37
y1 = y2
y2 = y3
(3.3.64)
y3 = − y1 y3 +
2
2
y2 y3
y
+ b( y3 − )
y1
y1
La ecuación del anticontrolador tiene la siguiente forma:
(3.3.65)
p11 ( y ) + p12 ( y ) q1−1 ( y ) + (b + δ b) p2 ( y ) + ∑ γ s ( ys +1 − y( s +1)* ) = v = ε sin (ξ ( y1 (t − τ ) − y1* ) ) .
2
s =0
Definimos los polinomios en coordenadas y de la forma siguiente:
p11 ( y ) = − y1 y3 ;
p12 ( y ) = y2 y3 ;
q1 ( y ) = y1 ;
p2 ( y ) = y3 −
(3.3.66)
y22
.
y1
Entonces la ecuación de la perturbación δ b en coordenadas x es:
(3.3.67)
2
⎛
⎞
δ b = ⎜ v − ∑ γ s ( Lsf h( x) − Lsf h( x* ) ) − p11 ( H ( x) ) − p12 ( H ( x) ) q1−1 ( H ( x) ) ⎟ ⋅ p2−1 ( H ( x) ) − b ,
s =0
⎝
⎠
con v = ε sin (ξ ( h( x(t − τ ) − h( x* ) ) ) .
En coordenadas x se tiene que los polinomios son:
p11 ( H ( x)) = −bx1 x2 + ax22 + x22 x3 ;
p12 ( H ( x)) = bx12 − ax1 x2 − x1 x2 x3 ;
q1 ( H ( x)) = x2 ;
p2 ( H ( x)) = bx1 − ax2 − x2 x3 −
(3.3.68)
x12
.
x2
38
El conjunto singular está definido por los ceros de los términos q1 y p2 . En
coordenadas y , la región singular esta definida por las regiones:
y1 = 0 ;
y3 −
y22
=0.
y1
Realizando la transformación a coordenadas x , se tiene que la singularidad esta dada
por:
x2 = 0 ;
bx1 − ax2 − x2 x3 −
x12
=0.
x2
El sistema de Rucklidge tiene equilibrio en
Z 0 = 0, Z1 = (0, −a , − a ).
Seleccionando un equilibrio fuera del origen y de x2 = 0 , por ejemplo Z1 , el término
v queda de la siguiente forma:
((
))
v = ε sin ξ x2 (t − τ ) − −a .
(3.3.69)
Así el sistema de Rucklidge restringido en cualquier dominio abierto D ∋ Z1
evitando las singularidades exhibe caos para un área mayor de parámetros dada por la
retroalimentación con retardo b(t ) = b + δ b(t , x(t )) ( b es reemplazada por b(t ) en el
sistema de Rucklidge) utilizando una τ > 0 lo suficientemente grande.
3.3.8 Sistema de Rand usando a como parámetro de control
En este diseño de anticontrol se toman las ecuaciones del sistema de Rand, [21]:
x1 = µ x1 − x2 − x1 x3
x2 = x1 + µ x2
(3.3.70)
x3 = − x3 + ax12 x3 + x22 .
39
Definiendo:
h ( x ) = x2
(3.3.71)
y a como el parámetro de control. Enseguida se calculan las derivadas de Lie de h con
respecto al campo vectorial del sistema de Rand:
L f h( x ) = x1 + µx2 ;
L2f h( x) = 2 µx1 − x2 − x1 x3 + µ 2 x2 ;
(3.3.72)
L3f h = x1 (3µ 2 − 1) + x2 ( µ 3 − 3µ ) + x1 x3 (−3µ + 1) + x2 x3 + x1 x32 − ax13 x3 − x1 x22 .
Resolviendo para x1 , x2 y x3 se tiene que:
x1 = L f h − µ h;
x2 = h;
(3.3.73)
−2 µ L f h − ( µ + 1)h − L h
2
x3 =
Lf h − µh
2
f
.
En coordenadas y , y1 = h( x); y2 = L f h( x); y3 = L2f h( x) se obtiene la forma normal
racional:
y1 = y2
y2 = y3
(3.3.74)
y3 = y1 (−1 + µ + µ 3 − µ 2 ) + y2 (−1 + 2µ − 3µ 2 ) + y3 (−1 + 3µ) + µy13 − y12 y2 +
1
( y32 + µ 2 y12 + y1 y3 + 4 µ 2 y22 − 4 µy2 y3 + µ 4 y12 − 2 µy1 y2 − 4 µ 3 y1 y2 + 2 µ 2 y1 y3 ) +
y2 − µy1
a ( y1 y22 − 2 µy23 + y22 y3 + µ 4 y13 + µ 2 y13 + 5µ 2 y1 y22 − 4 µ 3 y12 y2 − 2 µy12 y2 − 2 µy1 y2 y3 + µ 2 y12 y3 ) .
La ecuación del anticontrolador tiene la siguiente forma:
(3.3.75)
p11 ( y ) + p12 ( y ) q1−1 ( y ) + ( µ + δµ ) p2 ( y ) + ∑ γ s ( ys +1 − y( s +1)* ) = v = ε sin (ξ ( y1 (t − τ ) − y1* ) ) .
2
s =0
40
Se definen los polinomios en coordenadas y de la forma siguiente:
(3.3.76)
p11 ( y ) = y1 (−1 + µ + µ 3 − µ 2 ) + y2 (−1 + 2µ − 3µ 2 ) + y3 (−1 + 3µ ) + µ y13 − y12 y2 ;
p12 ( y ) = y32 + y12 ( µ 2 + µ 4 ) + y1 y3 (1 + 2µ 2 ) + 4µ 2 y22 − 4µ y2 y3 + y1 y2 (−2µ − 4 µ 3 );
q1 ( y ) = y2 − µ y1 ;
p2 ( y ) = y1 y22 − 2 µ y23 + y22 y3 + y13 ( µ 4 + µ 2 ) + 5µ 2 y1 y22 + y12 y2 (−4 µ 3 − 2 µ ) − 2 µ y1 y2 y3 + µ 2 y12 y3 .
Entonces la ecuación de la perturbación δ a en coordenadas x es:
(3.3.77)
⎛
2
⎞
⎝
s =0
⎠
δ a = ⎜ v − ∑ γ s ( Lsf h( x) − Lsf h( x* ) ) − p11 ( H ( x) ) − p12 ( H ( x) ) q1−1 ( H ( x) ) ⎟ ⋅ p2−1 ( H ( x) ) − a ,
con v = ε sin (ξ ( h( x(t − τ ) − h( x* ) ) ) .
En coordenadas x se tiene que los polinomios son:
p11 ( H ( x)) = x1 (3µ 2 − 1) + x2 ( µ 3 − 3µ ) + x1 x3 (−3µ + 1) − x1 x22 ;
p12 ( H ( x)) = x1 x2 x3 + x12 x32 ;
(3.3.78)
q1 ( H ( x)) = x1 ;
p2 ( H ( x)) = − x13 x3 .
El conjunto singular está definido por los ceros de los términos q1 y p2 . En
coordenadas y , la región singular esta definida por las regiones:
y2 − µ y1 = 0 ;
y1 y22 − 2 µ y23 + y22 y3 + y13 ( µ 4 + µ 2 ) + 5µ 2 y1 y22 + y12 y2 (−4 µ 3 − 2 µ ) − 2 µ y1 y2 y3 + µ 2 y12 y3 = 0 .
Realizando la transformación a coordenadas x , se tiene que la singularidad esta dada
por:
x1 = 0 ;
− x13 x3 = 0 .
41
El sistema de Rand tiene equilibrio en:
⎛
1
µ+
⎜
1
µ
Z± = ⎜ ±
,∓
a
⎜
µ
2
⎜ aµ + µ + µ
⎝
⎞
⎟
1⎟
µ
.
,µ +
a
µ⎟
aµ + + µ 2
⎟
µ
⎠
µ+
1
Se escoge un equilibrio fuera de x1 = 0 y x3 = 0 , por ejemplo Z + , se tiene que el
término v queda de la siguiente forma:
v = ε sin (ξ ( x2 (t − τ ) − K 0 ) ) ,
donde K 0 = −
1
µ+
µ aµ +
a
µ
(3.3.79)
1
µ
+ µ2
.
Así el sistema de Rand restringido en cualquier dominio abierto D ∋ Z + dentro del
cuadrante x1 > 0 ; x3 > 0 , exhibe caos para un área mayor de parámetros dada por la
retroalimentación con retardo a(t ) = a + δ a(t , x(t )) ( a es reemplazada por a(t ) en el
sistema de Rand) utilizando una τ > 0 lo suficientemente grande.
42
Capítulo 4
Simulación Numérica
En este capítulo se presentan las simulaciones numéricas de los ocho diseños de
anticontrol con retroalimentación de retardo realizados en este trabajo, y que fueron
descritos en el capítulo anterior. Los valores de los parámetros seleccionados para cada
simulación son valores para los cuales los sistemas originales no presentan caos. Se
muestra que con esa misma selección de parámetros, después de aplicar el diseño, los
sistemas exhiben caos.
4.1 Sistema de Lorenz usando r como parámetro de control
Después de aplicar la transformación de coordenadas y de introducir el
(
anticontrolador v = ε sin ξ ( h ( x(t − τ ) ) − h( x* ) )
)
a través de una perturbación al
parámetro r , llegamos al sistema caótico generado, en donde el anticontrolador provoca
un comportamiento caótico en este sistema.
Los coeficientes Hurwitz seleccionados son: γ 0 = 6, γ 1 = 11 y γ 2 = 6 . Se define un
retardo de τ = 1 .
El sistema de Lorenz sin controlar es caótico si r > rH ≈ 24.74 , en este caso definimos
r = 5 . El sistema queda de la siguiente forma:
y1 = y2
y2 = y3
(4.1.1)
⎛ ⎛
⎛b
⎞⎞⎞ ⎛
⎛b
⎞⎞
y3 = ε sin ⎜ ξ ⎜ y1 (t − τ ) − ( r − 1) ⎜ − σ ⎟ ⎟ ⎟ − 6 ⎜ y1 − ( r − 1) ⎜ − σ ⎟ ⎟ − 11 y2 − 6 y3
⎝2
⎠⎠⎠ ⎝
⎝2
⎠⎠
⎝ ⎝
43
donde ε = 1, ξ = 55, σ = 1 y b = 8 / 3 .
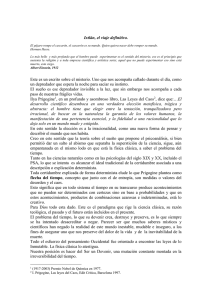
La Figura 4.1 (a, c, e) muestra las gráficas del atractor caótico generado, que resulta
de la simulación del sistema (4.1.1) utilizando t = 500 y con una condición inicial
y0 = (1.2, 0, 0) . La Figura 4.1 (b, d, f) muestra las gráficas del atractor caótico del sistema
de Lorenz generado a través del diseño de anticontrol con retroalimentación de retardo
usando a r como el parámetro de control de la sección 3.3.1. Para obtener la
correspondencia en coordenadas x usamos la siguiente transformación:
x12 = 2(b − 2σ ) −1 ( y2 + by1 );
x3 = σ −1 (b − 2σ ) −1 ( y2 + 2σ y1 );
(4.1.2)
x1 x2 = σ −1 (b − 2σ ) −1 ( y3 + 2bσ y1 + (2σ + b) y2 ).
0.025
3.14
0.02
3.13
3.12
0.015
3.11
0.01
x2
y2
3.1
0.005
3.09
0
3.08
-0.005
3.07
-0.01
-0.015
1.165
3.06
1.17
1.175
1.18
1.185
1.19
y
1.195
1.2
1.205
3.05
3.06
1.21
3.065
3.07
3.075
1
3.08
3.085
x
3.09
3.095
3.1
3.105
3.11
1
(a)
(b)
0.025
3.14
0.02
3.13
3.12
0.015
3.11
0.01
x2
y2
3.1
0.005
3.09
0
3.08
-0.005
3.07
-0.01
-0.015
-0.05
3.06
-0.04
-0.03
-0.02
-0.01
0
y
(c)
3
0.01
0.02
0.03
0.04
3.05
3.5
3.55
3.6
x
3.65
3
(d)
44
1.21
3.11
1.205
3.105
3.1
1.2
3.095
1.195
3.09
x1
y1
1.19
3.085
1.185
3.08
1.18
3.075
1.175
3.07
1.17
1.165
-0.05
3.065
-0.04
-0.03
-0.02
-0.01
0
y
0.01
0.02
0.03
0.04
3.06
3.5
3.55
3.6
x
3
(e)
3.65
3
(f)
Figura 4.1. Gráficas de las proyecciones del atractor caótico generado por el sistema 4.1.1 y su
correspondencia en coordenadas x del sistema de Lorenz usando r como parámetro de control.
(a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 .
4.2 Sistema I usando B como parámetro de control
Después de aplicar la transformación de coordenadas y de introducir el
anticontrolador v = ε sin (ξ h ( x(t − τ ) ) ) a través de una perturbación al parámetro B ,
llegamos al sistema caótico generado, en donde el anticontrolador provoca un
comportamiento caótico en este sistema.
Los coeficientes Hurwitz seleccionados son: γ 0 = 2 y γ 1 = 3 . Se define un retardo de
τ = 1.
El sistema queda de la siguiente forma:
y1 = y2
y2 = ε sin(ξ y1 (t − τ )) − 2 y1 − 3 y2
(4.2.1)
donde ε = 1, ξ = 30, β = 3, B = 5 y Da = 10.
La Figura 4.2 (a, c) muestra las gráficas del atractor caótico generado, que resulta de
la simulación del sistema (4.2.1) utilizando t = 500 y con una condición inicial
45
y0 = (0.1, 0.1) . La Figura 4.2 (b, d) muestra las gráficas del atractor caótico del sistema de
I generado a través del diseño de anticontrol con retroalimentación de retardo usando B
como el parámetro de control de la sección 3.3.2. Para obtener la correspondencia en
coordenadas x usamos la siguiente transformación:
x1 = B −1 y1 +
x2 =
y2 + y1
β
y2 + y1
;
Bβ
(4.2.2)
.
0.4
0.2
0.3
0.15
0.2
0.1
0.1
y2
y2
0.05
0
0
-0.1
-0.05
-0.2
-0.1
-0.3
-0.4
-0.4
-0.3
-0.2
-0.1
0
y
0.1
0.2
0.3
0.4
-0.15
-0.1
1
-0.08
-0.06
-0.04
-0.02
0
y
0.02
0.04
0.06
0.08
0.1
1
(a)
(b)
Figura 4.2. Gráficas del atractor caótico generado por el sistema 4.2.1 y su correspondencia en
coordenadas x del sistema I usando B como parámetro de control. (a) y1 − y2 , (b) x1 − x2 .
El sistema I sin controlar no es caótico, al aplicar el anticontrolador con
retroalimentación de retardo usando a B como el parámetro de control y de acuerdo con
las consideraciones hechas, el sistema controlado presenta un comportamiento caótico.
4.3 Sistema de Rössler usando b como parámetro de control
Después de aplicar la transformación de coordenadas y de introducir el
(
anticontrolador v = ε sin ξ ( h ( x(t − τ ) ) − h( x* ) )
)
a través de una perturbación al
parámetro b , llegamos al sistema caótico generado, en donde el anticontrolador provoca
un comportamiento caótico en este sistema.
46
Los coeficientes Hurwitz seleccionados son: γ 0 = 6, γ 1 = 11 y γ 2 = 6 . Se define un
retardo
de
τ = 1.
En
este
caso
tomamos
un
desplazamiento
de
eq = −c / 2a + c 2 − 4ab / 2a .
El sistema de Rössler tiene equilibrio en:
)
(
Z ± = c / 2 ± c 2 − 4ab / 2, −c / 2a ∓ c 2 − 4ab / 2a, c / 2a ± c 2 − 4ab / 2a ,
en este caso tomamos Z − .
El sistema queda de la siguiente forma:
y1 = y2
y2 = y3
(4.3.1)
y3 = ε sin (ξ ( y1 (t − τ ) − eq ) ) − 6( y1 − eq) − 11 y2 − 6 y3 ,
donde ε = 1, ξ = 55, a = 0.2, b = 2 y c = 2.5.
La Figura 4.3 (a, c, e) muestra las gráficas del atractor caótico generado, que resulta
de la simulación del sistema (4.3.1) utilizando t = 500 y con una condición inicial
y0 = (−0.8, 0.1, 0.1) . La Figura 4.3 (b, d, f) muestra las gráficas del atractor caótico del
sistema de Rössler generado a través del diseño de anticontrol con retroalimentación de
retardo usando a b como el parámetro de control de la sección 3.3.3. Para obtener la
correspondencia en coordenadas x usamos la siguiente transformación:
x1 = y2 − ay1 ;
x2 = y1 ;
(4.3.2)
x3 = − y3 − y1 + ay2 .
47
0.15
-0.75
0.1
-0.8
0.05
-0.85
x2
y2
0
-0.9
-0.05
-0.95
-0.1
-1
-0.95
-0.9
-0.85
y
-0.8
-1
-0.75
0.05
0.1
0.15
0.2
x
1
(a)
0.25
0.3
1
(b)
0.15
-0.75
0.1
-0.8
0.05
-0.85
x2
y2
0
-0.9
-0.05
-0.95
-0.1
-0.25
-0.2
-0.15
-0.1
-0.05
0
y3
0.05
0.1
0.15
0.2
-1
0.65
0.25
0.7
0.75
0.8
(c)
0.85
x3
0.9
0.95
1
1.05
(d)
0.3
-0.75
0.25
-0.8
0.2
x1
y1
-0.85
0.15
-0.9
0.1
-0.95
0.05
-1
-0.25
-0.2
-0.15
-0.1
-0.05
0
y
3
(e)
0.05
0.1
0.15
0.2
0.25
0.65
0.7
0.75
0.8
0.85
x
0.9
0.95
1
1.05
3
(f)
Figura 4.3. Gráficas de las proyecciones del atractor caótico generado por el sistema 4.3.1 y su
correspondencia en coordenadas x del sistema de Rössler usando b como parámetro de control.
(a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 .
48
4.4 Sistema de Lorenz usando b como parámetro de control
Después de aplicar la transformación de coordenadas y de introducir el
(
anticontrolador v = ε sin ξ ( h ( x(t − τ ) − h( x* ) ) )
)
a través de una perturbación al
parámetro b , llegamos al sistema caótico generado, en donde el anticontrolador provoca
un comportamiento caótico en este sistema.
Los coeficientes Hurwitz seleccionados son: γ 0 = 6 , γ 1 = 11 y γ 2 = 6 . Se define un
retardo de τ = 1 .
El sistema queda de la siguiente forma:
y1 = y2
y2 = y3
((
)) (
(4.4.1)
)
y3 = ε sin ξ y1 (t − τ ) − b(r − 1) − 6 y1 − b(r − 1) − 11y2 − 6 y3
donde ε = 1, ξ = 63, σ = 1, r = 28 y b = 10 .
La Figura 4.4 (a, c, e) muestra las gráficas del atractor caótico generado, que resulta
de la simulación del sistema (4.4.1) utilizando t = 500 y con una condición inicial
y0 = (16.43, 0, 0) . La Figura 4.4 (b, d, f) muestra las gráficas del atractor caótico del
sistema de Lorenz generado a través del diseño de anticontrol con retroalimentación de
retardo usando a b como el parámetro de control de la sección 3.3.4. Para obtener la
correspondencia en coordenadas x usamos la siguiente transformación:
x1 = y1 ;
x2 = σ −1 y2 + y1 ;
x3 =
(4.4.2)
− y3 + y1 (σ r − σ ) − y2 (σ + 1)
.
σ y1
49
16.6
0.1
16.55
16.5
0.05
16.45
x2
y2
0
16.4
-0.05
16.35
-0.1
16.3
16.35
16.4
16.45
y
16.5
16.25
16.55
16.35
16.4
16.45
x
1
(a)
16.5
16.55
1
(b)
16.6
0.1
16.55
16.5
0.05
16.45
x2
y2
0
16.4
-0.05
16.35
-0.1
16.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
y
0.05
0.1
0.15
0.2
16.25
26.98
0.25
26.985
26.99
26.995
3
27
x
27.005
27.01
27.015
27.02
3
(c)
(d)
16.5
16.5
16.45
16.45
x1
16.55
y1
16.55
16.4
16.4
16.35
16.35
-0.25
-0.2
-0.15
-0.1
-0.05
(e)
0
y3
0.05
0.1
0.15
0.2
0.25
26.98
26.985
26.99
26.995
27
x3
27.005
27.01
27.015
27.02
(f)
Figura 4.4. Gráficas de las proyecciones del atractor caótico generado por el sistema 4.4.1 y su
correspondencia en coordenadas x del sistema de Lorenz usando b como parámetro de control.
(a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 .
50
4.5 Sistema Modificado de Lorenz usando κ como parámetro
de control
Después de aplicar la transformación de coordenadas y de introducir el
(
anticontrolador v = ε sin ξ ( h ( x(t − τ ) − h( x* ) ) )
)
a través de una perturbación al
parámetro κ , llegamos al sistema caótico generado, en donde el anticontrolador provoca
un comportamiento caótico en este sistema.
Los coeficientes Hurwitz seleccionados son: γ 0 = 1 , γ 1 = 3 y γ 2 = 3 . Se define un
retardo de τ = 1 .
El sistema queda de la siguiente forma:
y1 = y2
y2 = y3
(4.5.1)
⎛ ⎛
κ ⎞⎞ ⎛
κ⎞
y3 = ε sin ⎜ ξ ⎜⎜ y1 (t − τ ) −
y
−
−
⎟
⎟
⎜
⎟ − 3 y2 − 3 y3
1
⎜
s ⎟⎠ ⎟⎠ ⎜⎝
s ⎟⎠
⎝ ⎝
donde ε = 1, ξ = 68, s = 1 y κ = 25.
La Figura 4.5 (a, c, e) muestra las gráficas del atractor caótico generado, que resulta
de la simulación del sistema (4.5.1) utilizando t = 500 y con una condición inicial
y0 = (5.01, 0.1, 0.1) . La Figura 4.5 (b, d, f) muestra las gráficas del atractor caótico del
sistema Modificado de Lorenz generado a través del diseño de anticontrol con
retroalimentación de retardo usando a κ como el parámetro de control de la sección
3.3.5. Para obtener la correspondencia en coordenadas x usamos la siguiente
transformación:
51
x1 = y1 ;
x2 =
x3 =
y2 + sy1
;
−s
(4.5.2)
y3 − s 2 y1 − s 2 (
y2 + sy1
y + sy1
) − s( 2
)
−s
−s
.
s 2 y1
-4.4
0.3
-4.6
0.2
-4.8
0
x2
y2
0.1
-5
-5.2
-0.1
-0.2
-5.4
-0.3
-5.6
4.6
4.7
4.8
4.9
5
y
5.1
5.2
5.3
5.4
5.5
4.6
4.7
4.8
4.9
1
5
x
(a)
5.1
5.2
5.3
5.4
5.5
1
(b)
-4.4
0.3
-4.6
0.2
-4.8
0
x2
y2
0.1
-5
-5.2
-0.1
-0.2
-5.4
-0.3
-5.6
-0.4
-0.3
-0.2
-0.1
0
y
3
(c)
0.1
0.2
0.3
0.4
0.85
0.9
0.95
1
1.05
x
1.1
1.15
3
(d)
52
5.4
5.4
5.3
5.3
5.2
5.2
5.1
5.1
x1
5.5
y1
5.5
5
5
4.9
4.9
4.8
4.8
4.7
4.7
4.6
-0.4
4.6
-0.3
-0.2
-0.1
0
y
0.1
0.2
0.3
0.4
0.85
0.9
0.95
1
1.05
x
3
(e)
1.1
1.15
3
(f)
Figura 4.5. Gráficas de las proyecciones del atractor caótico generado por el sistema 4.5.1 y su
correspondencia en coordenadas x del sistema Modificado de Lorenz usando κ como parámetro
de control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 .
4.6 Sistema de Liu usando b como parámetro de control
Después de aplicar la transformación de coordenadas y de introducir el
(
anticontrolador v = ε sin ξ ( h ( x(t − τ ) − h( x* ) ) )
)
a través de una perturbación al
parámetro b , llegamos al sistema caótico generado, en donde el anticontrolador provoca
un comportamiento caótico en este sistema.
Los coeficientes Hurwitz seleccionados son: γ 0 = 6 , γ 1 = 11 y γ 2 = 6 . Se define un
retardo de τ = 1 .
El sistema queda de la siguiente forma:
y1 = y2
y2 = y3
(4.6.1)
⎛ ⎛
cb ⎞ ⎞ ⎛
cb ⎞
− 6 ⎜⎜ y1 −
y3 = ε sin ⎜ ξ ⎜⎜ y1 (t − τ ) −
⎟
⎟
⎟⎟ − 11 y2 − 6 y3
⎟
⎜
⎟
θ
k
θ
k
⎝
⎠
⎝
⎠
⎝
⎠
53
donde ε = 1, ξ = 30, a = 1, b = 40, k = 1, c = 2.5 y θ = 4 .
La Figura 4.6 (a, c, e) muestra las gráficas del atractor caótico generado, que resulta
de la simulación del sistema (4.6.1) utilizando t = 500 y con una condición inicial
y0 = (5.01, 0.01, 0.01) . La Figura 4.6 (b, d, f) muestra las gráficas del atractor caótico del
sistema de Liu generado a través del diseño de anticontrol con retroalimentación de
retardo usando a κ como el parámetro de control de la sección 3.3.6. Para obtener la
correspondencia en coordenadas x usamos la siguiente transformación:
x1 = y1 ;
x2 = a −1 y2 + y1 ;
x3 =
(4.6.2)
− y3 − ay2 + aby1
.
aky1
0.06
5.15
0.04
0.02
5.1
0
x2
y2
5.05
-0.02
-0.04
5
-0.06
4.95
-0.08
-0.1
4.96
4.98
5
5.02
5.04
5.06
5.08
5.1
5.12
4.9
5.14
5
5.02
5.04
y1
(a)
5.06
x1
5.08
5.1
5.12
5.14
(b)
0.06
5.15
0.04
0.02
5.1
0
x2
y2
5.05
-0.02
-0.04
5
-0.06
4.95
-0.08
-0.1
-0.1
-0.05
0
0.05
y
(c)
3
0.1
0.15
0.2
4.9
39.96
39.97
39.98
39.99
40
x
40.01
40.02
40.03
3
(d)
54
5.14
5.14
5.12
5.12
5.1
5.1
5.08
5.08
x1
y1
5.06
5.06
5.04
5.04
5.02
5.02
5
5
4.98
4.96
-0.1
-0.05
0
0.05
y
0.1
0.15
0.2
39.96
39.97
39.98
39.99
40
x
3
(e)
40.01
40.02
40.03
3
(f)
Figura 4.6. Gráficas de las proyecciones del atractor caótico generado por el sistema 4.6.1 y su
correspondencia en coordenadas x del sistema de Liu usando b como parámetro de control. (a)
y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 .
4.7 Sistema de Rucklidge usando b como parámetro de
control
Después de aplicar la transformación de coordenadas y de introducir el
(
anticontrolador v = ε sin ξ ( h ( x(t − τ ) − h( x* ) ) )
)
a través de una perturbación al
parámetro b , llegamos al sistema caótico generado, en donde el anticontrolador provoca
un comportamiento caótico en este sistema.
Los coeficientes Hurwitz seleccionados son: γ 0 = 1.188 , γ 1 = 3.81 y γ 2 = 3.55 . Se
define un retardo de τ = 1 .
El sistema queda de la siguiente forma:
y1 = y2
y2 = y3
((
y3 = ε sin ξ y1 (t − τ ) − − a
)) − 1.188 ( y −
1
(4.7.1)
)
− a − 3.81 y2 − 3.55 y3
55
donde ε = 2.5, ξ = 357, a = −25 y b = 4 .
La Figura 4.7 (a, c, e) muestra las gráficas del atractor caótico generado, que resulta
de la simulación del sistema (4.7.1) utilizando t = 500 y con una condición inicial
y0 = (5.001, 0.001, 0.001) . La Figura 4.7 (b, d, f) muestra las gráficas del atractor caótico
del sistema de Rucklidge generado a través del diseño de anticontrol con
retroalimentación de retardo usando a b como el parámetro de control de la sección
3.3.7. Para obtener la correspondencia en coordenadas x usamos la siguiente
transformación:
x1 = y2 ;
x2 = y1 ;
x3 =
(4.7.2)
− y3 + by2 − ay1
.
y1
0.5
0.4
5.4
0.3
0.2
5.2
0.1
0
x2
y2
5
-0.1
4.8
-0.2
-0.3
4.6
-0.4
-0.5
4.4
4.6
4.8
5
y
1
(a)
5.2
5.4
5.6
4.4
-0.5
-0.4
-0.3
-0.2
-0.1
0
x
0.1
0.2
0.3
0.4
0.5
1
(b)
56
0.5
5.8
0.4
5.6
0.3
5.4
0.2
0.1
x2
y2
5.2
0
5
-0.1
-0.2
4.8
-0.3
4.6
-0.4
-0.5
-0.8
-0.6
-0.4
-0.2
0
y
0.2
0.4
0.6
4.4
24.5
0.8
24.6
24.7
24.8
24.9
25
x
3
(c)
25.1
25.2
25.3
25.4
25.1
25.2
25.3
25.4
3
(d)
5.8
0.5
0.4
5.6
0.3
5.4
0.2
0.1
0
x1
y1
5.2
5
-0.1
-0.2
4.8
-0.3
4.6
-0.4
4.4
-0.8
-0.6
-0.4
-0.2
0
y3
0.2
0.4
0.6
0.8
-0.5
24.5
24.6
24.7
24.8
24.9
25
x3
(e)
(f)
Figura 4.7. Gráficas de las proyecciones del atractor caótico generado por el sistema 4.7.1 y su
correspondencia en coordenadas x del sistema de Rucklidge usando b como parámetro de
control. (a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 .
4.8 Sistema de Rand usando a como parámetro de control
Después de aplicar la transformación de coordenadas y de introducir el
(
anticontrolador v = ε sin ξ ( h ( x(t − τ ) − h( x* ) ) )
)
a través de una perturbación al
parámetro a , llegamos al sistema caótico generado, en donde el anticontrolador provoca
un comportamiento caótico en este sistema.
57
Los coeficientes Hurwitz seleccionados son: γ 0 = 0.336 , γ 1 = 1.46 y γ 2 = 2.1 . Se
define un retardo de τ = 1 . El desplazamiento es:
eq = −
1
µ+
µ aµ +
a
µ
1
µ
+µ
.
2
El sistema queda de la siguiente forma:
y1 = y2
y2 = y3
(4.8.1)
y3 = ε sin (ξ ( y1 (t − τ ) − eq ) ) − 0.336 ( y1 − eq ) − 1.46 y2 − 2.1 y3
donde ε = 1, ξ = 150, µ = 0.5 y a = 1 .
La Figura 4.8 (a, c, e) muestra las gráficas del atractor caótico generado, que resulta
de la simulación del sistema (4.8.1) utilizando t = 500 y con una condición inicial
y0 = (−1.81, 0.001, 0.001) . La Figura 4.8 (b, d, f) muestra las gráficas del atractor caótico
del sistema de Rand generado a través del diseño de anticontrol con retroalimentación de
retardo usando a a como el parámetro de control de la sección 3.3.8. Para obtener la
correspondencia en coordenadas x usamos la siguiente transformación:
x1 = y2 − µ y1 ;
x2 = y1 ;
x3 =
(4.8.2)
−2µ y2 − ( µ + 1) y1 − y3
.
y2 − µ y1
2
58
0.3
-1.2
0.2
-1.4
0.1
-1.6
0
-1.8
x2
-1
y2
0.4
-0.1
-2
-0.2
-2.2
-0.3
-2.4
-0.4
-2.6
-0.5
-2.8
-2.6
-2.4
-2.2
-2
-1.8
y
-1.6
-1.4
-1.2
-2.8
0.2
-1
0.4
0.6
0.8
1
x
1
(a)
1.2
1.4
1.6
1
(b)
0.4
-1
0.3
-1.2
0.2
-1.4
0.1
-1.6
0
x2
y2
-1.8
-0.1
-2
-0.2
-2.2
-0.3
-2.4
-0.4
-2.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
y3
0.1
0.2
0.3
0.4
1
2
3
4
5
6
x3
(c)
(d)
-1
1.6
-1.2
1.4
-1.4
1.2
-1.6
1
x1
y1
-1.8
-2
0.8
-2.2
0.6
-2.4
0.4
-2.6
-2.8
-0.4
-0.3
-0.2
-0.1
0
y
3
(e)
0.1
0.2
0.3
0.4
0.2
1
2
3
4
x
5
6
7
3
(f)
Figura 4.8. Gráficas de las proyecciones del atractor caótico generado por el sistema 4.8.1 y su
correspondencia en coordenadas x del sistema de Rand usando a como parámetro de control.
(a) y1 − y2 , (c) y2 − y3 , (e) y1 − y3 , (b) x1 − x2 , (d) x2 − x3 , (f) x1 − x3 .
59
Capítulo 5
Aplicaciones
Los avances científicos y tecnológicos han atestiguado que el caos puede ser
beneficioso para algunas aplicaciones. De hecho, el control y anticontrol de caos como
una nueva tecnología emergente se ha convertido actualmente en un punto de encuentro
donde coinciden ingenierías, la física, las matemáticas, ciencias médicas y sociales [2].
El mezclado de fluidos es una de las aplicaciones donde el caos no sólo es útil, sino
deseable. En esta aplicación, la tarea es que los fluidos sean mezclados completamente
utilizando la menor cantidad de energía posible. Para lograrlo es mucho más fácil y más
rápido si la dinámica del movimiento de las partículas de los dos fluidos es caótica,
puesto que de otra manera resulta difícil y tardado obtener propiedades de mezclado
rigurosas, debido al movimiento invariante aplicado para el mezclado [2]. Este ha sido
uno de los temas principales en el mezclado de fluidos, conocido como advección caótica
[19]. El mezclado caótico es crucial en aplicaciones que envuelven calentamiento, tal
como lo es el calentamiento de plasma para un reactor de nuclear, en la generación de
energía. En este proceso son inyectadas olas de calor en el reactor, para lo cual el mejor
resultado es obtenido cuando la convección de calor dentro del reactor es caótica [18].
La advección caótica puede ser creada a través de anticontrol usando retroalimentación
de retardo [36].
La idea de generar caos para obtener algún beneficio, ha sido propuesta para resolver
el problema de llevar las respuestas del modelo del cerebro humano a un comportamiento
que no sea el de puntos de equilibrio de tipo silla, de esta forma algunos comportamientos
periódicos indeseables pueden ser prevenidos [23]. En la regulación del ritmo cardiaco,
algunos estudios en laboratorio revelan que la compleja variabilidad de la dinámica sana
60
de diversos sistemas fisiológicos tiene características que guardan semejanza con el
comportamiento caótico, indicando la importancia del caos en el corazón [4].
La sincronización de sistemas caóticos ha atraído mucha atención en los últimos años
debido a la posibilidad de crear sistemas de comunicaciones seguras. El concepto de
sincronización de sistemas caóticos significa hacer tanto al transmisor como al receptor,
los cuales son sistemas caóticos, oscilar de una manera sincronizada, lo cual ha quedado
demostrado en diversos trabajos de investigación [6, 8]. En algunas técnicas la señal a
transmitir es introducida en unos de los parámetros del sistema transmisor, pero debido a
que los sistemas caóticos son caóticos para un rango acotado de valores de sus
parámetros, las características de amplitud de esta señal puede llevar al sistema caótico
transmisor a dejar de presentar caos. En este contexto, el método de diseño de anticontrol
aplicado en este trabajo de tesis, podría ampliar el rango de valores de los parámetros del
sistema transmisor para los cuales continuará siendo caótico, y así, las características de
la señal a transmitir ya no sería una limitante para que el sistema pierda su
comportamiento caótico.
Como se observa el caos puede ser beneficioso para muy diversas aplicaciones y
áreas del conocimiento humano, aunque queda claro, también, que hay mucho por
investigar y descubrir en este campo.
61
Capítulo 6
Conclusiones
En este trabajo de tesis se resolvió el problema de caotificación o anticontrol a través
de retroalimentación de retardo para sistemas no lineales continuos de tres dimensiones.
Esta aproximación de diseño de anticontrolador se basa en una transformación del
sistema de su forma original a una ecuación diferencial escalar explícita de tercer orden
con una no linealidad racional y en la aplicación de una retroalimentación de retardo
propuesta por Wang, Chen y Yu en [36].
Se realizaron ocho diseños de anticontrol y se hicieron las simulaciones numéricas de
todos ellos. El único sistema que no era caótico originalmente es el sistema I, y al
aplicarle el diseño de anticontrol se logró caotificarlo. A los demás sistemas se les aplicó
el diseño de anticontrol para aumentar el rango de valores de los parámetros para los
cuales continúan con un comportamiento caótico. Los diseños de anticontrol realizados
en este trabajo de tesis, muestran que este método puede crear caos en sistemas no
caóticos e incrementar el rango de parámetros para los cuales los sistemas caóticos
mantienen su dinámica caótica.
Se realizó caotificación global para el sistema de Rössler y el sistema I, es decir, no
existieron regiones singulares al hacer el diseño de anticontrol. Para el sistema de Lorenz
con r como el parámetro de control, el sistema Modificado de Lorenz y el sistema de
Liu, se logró obtener una caotificación semiglobal. Para el resto de los sistemas
considerados también se logró caotificación pero con regiones singulares mas complejas
que las anteriores mencionadas, tal como se mostró en el capítulo 3. La posibilidad de
que se realicen diseños de anticontrol globales en un sistema, utilizando la técnica
descrita en este trabajo de tesis, depende de las características matemáticas de dicho
sistema y de la habilidad del diseñador en definir una salida adecuada para tal propósito.
62
Para los casos en donde se obtuvo una caotificación semiglobal, la limitación radica en
que se debe de evitar que el valor de una de las variables del sistema sea cero, es decir, no
debe de tener valores dentro de la región singular. En los diseños con regiones singulares
de formas geométricas más complejas, la limitación es mayor, ya que los valores de todas
las variables del sistema están limitados a no estar dentro de la región singular.
La forma de los atractores y la solución a través del tiempo de los sistemas originales
sin controlar cambian significativamente al aplicársele el diseño de anticontrol por
retroalimentación de retardo, lo cual es una limitación cuando las características del
sistema original juegan un papel importante en una aplicación determinada. La forma del
atractor resultante está determinada por la selección de parámetros que se realice al llevar
a cabo el diseño de anticontrol.
Algunos diseños de anticontrol tienen la limitante de que el término de la entrada de
control y la transformación de coordenadas es más complicado que el sistema en sí, lo
cual para algunas aplicaciones no sería muy práctico.
La posibilidad de que un diseño de anticontrol se realice en determinado sistema
depende de la propuesta de una h por parte del diseñador, que cumpla las condiciones
mencionadas en el capitulo 3.
Esta técnica de caotificación se aplica a sistemas autónomos continuos en el tiempo,
no requiere de valores específicos de los parámetros del sistema original y tampoco es
necesario que el sistema original tenga cierta característica dinámica para que exista la
posibilidad de hacerlo caótico, a diferencia de otras técnicas para generar caos
mencionadas en el capitulo 1 que si lo requieren.
Un posible trabajo futuro es aplicar esta técnica y realizar caotificación a un sistema que
tenga una aplicación práctica en donde el caos sea beneficioso y llevar a cabo la
implementación física.
63
Apéndice A: Campos Vectoriales Relacionados
Consideramos dos campos vectoriales diferenciables f y g definidos en los
n
espacios vectoriales
y
m
respectivamente. Dejamos que H :
n
→
m
sea un
mapeo diferenciable.
Los
campos
f
vectoriales
g ( H ( x) ) = H ′( x) f ( x) para x ∈
n
y
g
se
denominan
H − relacionados
si
, [28].
Por ϕ ( x, t ) denotamos la solución de la ecuación x = f ( x) , con ϕ ( x, 0) = x para
cualquier x ∈
n
.
Por ψ ( x, t ) denotamos la solución de la ecuación y = g ( y ) , con ψ ( y, 0) = y para
cualquier y ∈
m
.
Teorema, [28]. Supongamos que f y g son dos campos vectoriales H − relacionados.
Entonces
ψ ( H ( x), t ) = H (ϕ ( x, t ) ) ,
para cualquier x ∈
n
(A.1)
y cualquier t para los cuales ambas soluciones ϕ ( x, t ) y
ψ ( H ( x), t ) existen.
De la misma forma se pueden construir campos vectoriales H − relacionados f y g
en los casos en donde f esta definida en un dominio U ⊂
dominio V ⊂
m
n
, g esta definida en un
y H : U → V . En este caso (A.1) es valido en U . En este trabajo f es
una campo vectorial polinomial.
64
En este trabajo se construyen campos vectoriales H − relacionados f y g por
medio de la búsqueda una H tal que exista una función racional a( w1 ,… , wn ) con la
propiedad:
Lnf h = a ( h, L f h,… , Lnf−1h ) .
(A.2)
Aquí a( w1 ,… , wn ) = a1 ( w1 ,… , wn ) / a2 ( w1 ,… , wn ) y a1 ; a2 son polinomios de n variables
reales.
Presentamos el mapeo polinomial H ( x ) = ( h( x), L f h( x),… , Lnf−1h( x) ) , H :
n
→
n
,
generado por f = ( f1 ,… f n ) y h .
T
Entonces la formula (A.2) define un campo vectorial H − relacionado g :
y1 = y2
y2 = y3
yn −1 = yn
yn = a( y1 ,… yn ).
De hecho, tomamos y1 = H1 ( x) = h( x) , y2 = H 2 ( x) = L f h( x) ,…, yn = H n ( x) = Lnf−1h( x) .
Aquí g esta definida fuera de la región de los ceros de a2 .
En este trabajo de tesis, para el caso de n = 3 , se establece la formula (A.2) a través
de la elección de una h y por eliminación de la variables x1 , x2 , x3 de las ecuaciones
polinomiales:
y1 = h( x);
y2 = L f h( x);
y3 = L2f h( x),
y sustituyendo las expresiones de x1 , x2 , x3 en la formula de L3f h( x) . La formalización de
esta idea se establece en la Proposición 1, presentada en el capitulo 3, la cual fue
obtenida en [25].
65
En el ejemplo de un campo vectorial cuasi-polinomial de 2 dimensiones f , por
eliminación de variables x1; x2 de las ecuaciones y1 = h( x ); y2 = L f h( x ) construimos
L2f h( x) = a ( h( x), L f h( x) ) por medio de una elección de h apropiada.
El sentido geométrico de (A.1) consiste en el hecho de que el mapeo H mapea las
soluciones de x = f ( x) en las soluciones de y = g ( y ) , con y ∈ imagen de H . Esto nos
permite aplicar las Proposiciones 1 y 2, presentadas en el capitulo 3, para crear caos.
66
Bibliografía y Referencias
[1] Brandt M. E., Chen G., Bifurcation control of two nonlinear models of cardiac
activity, IEEE Trans. Circuits Syst., I: Fundam. Theory Appl., Vol. 44, No. 10, pp.
1031–1034, 1997.
[2] Chen G., Chaos: Its control and generation for engineer applications, Dynamics of
Continuous, Discrete and Impulsive Systems, Vol. 10, No. 1-3, pp. 235-245, 2003.
[3] Georgiou I. T., Schwartz I. B., Dynamics of large scale coupled
structural/mechanical systems: A singular perturbation/proper orthogonal
decomposition approach, SIAM (Soc. Ind. Appl. Math) J. Appl. Math., Vol. 59, No.
4, pp. 1178–1207, 1999.
[4] Glass L., Cardiac arrhythmias and circle maps: A classical problem, Chaos, Vol. 1,
No. 1, pp. 13-19, 1991.
[5] Gregobi C., et al., Strange attractors that are not chaotic, Physica D., Vol. 13, No.
1-2, pp. 261-628, 1984.
[6] Hasler M., Schimming T., Chaos communication over noisy channels, Int. J.
Bifurcation Chaos Appl. Sci. Eng. Vol. 10, No. 4, pp. 719–732, 2000.
[7] Hirsch M., Smale S., Differential Equations, Dynamical Systems and Linear
Algebra, Academic Press, EUA, 1975.
[8] Kennedy M. P., Kolumban G., Kis G., Chaotic modulation for robust digital
communications over multipath channels, Int. J. Bifurcation Chaos Appl. Sci.
Eng., Vol. 10, No.4, pp. 695–718, 2000.
[9] Khalil H., Nonlinear Systems, Prentice Hall, EUA, 1996.
[10] Li T. Y., Yorke J. A., Period three implies chaos, Am. Math Monthly, Vol. 82, No.
10, pp. 481-485, 1975.
[11] Li Z., Halang W., Chen G., Tian L. F. Chaotifying continuous-time Takagi-Sugeno
fuzzy systems via time-delay feedback, Dynamics of Continuous, Discrete and
Impulsive Systems, Vol. 10, No. 6, pp. 813-832, 2003
[12] Liu C., Liu T., Liu L., Liu K., A new chaotic attractor, Chaos, Solitons and
Fractals, Vol. 22, No. 5, pp. 1031-10382, 2004.
67
[13] Lorenz E. N. Deterministic Nonperiodic Flow. J. Atmos. Sci., Vol. 20, No. 2, pp.
130-141, 1963.
[14] Marquez H. J., Nonlinear Control Systems: Analysis and Design, John Wiley &
Sons, EUA, 2003.
[15] Neukirch S., Giakomini H., The shape of attractors for 3-D dissipative dynamical
system, Physical Review Letters E, Vol. 61, No.5, pp. 5098-5118. 2000.
[16] Nikolov S., First Lyapunov value and Bifurcation Behavior of specific class of
three-dimensional systems, Int. Journal of Bifurcation and Chaos, Vol. 14, No. 8 ,
pp. 2811-2823, 2004.
[17] Ogata K., Modern Control Engineering, Prentice Hall, EUA, 1990.
[18] Ottino J. M. et al., Chaos, symmetry, and self-similarity: Exploiting order and
disorder in mixing processes, Science, Vol. 257, No. 5071, pp. 754-760, 1992.
[19] Ottino J. M., The Kinematics of Mixing: Stretching, Chaos, and Transport,
Cambridge Univ. Press, EUA, 1989.
[20] Rössler O. E., An equation for continuous chaos, Phys. Lett. A, Vol. 57, No. 5, pp.
397, 1976.
[21] Robbio F. I., Alonso D. M., Mogola L., On semi-analytical procedure for detecting
limit cycle bifurcations, Int. Journal of Bifurcation and Chaos, Vol. 14, No. 3, pp.
951-970, 2004
[22] Ruelle D., Takens F., On the nature of turbulence, Communications in
Mathematical Physics, Vol. 20, No. 3, pp. 167-192, 1971.
[23] Schiff S. J., et al., Controlling chaos in the brain, Nature, Vol. 370, No. 6491, pp.
615-620, 1994.
[24] Seydel R., World of Bifurcation. Online Collection and Tutorials of Nonlinear
Phenomena. WOB99, 1999.
[25] Starkov, K., On global property of the observation space. Sov. Phys. Doklady, Vol.
34, No. 7, pp. 752-753, 1989.
[26] Starkov K., Chen G., Chaotification of polynomial and rational normal forms,
Chaos, Solitons and Fractals, Vol. 22, No. 5, pp. 849-856, 2004.
68
[27] Starkov K., Cuen O., Chaotification of some classes of polynomial and
quasipolynomial systems and its applications, SICPRO ‘05 Conference, Moscú
Rusia, Enero 2005.
[28] Sternberg, S., Lectures on differential geometry. Prentice Hall, EUA, 1964.
[29] Strogatz S. H., Nonlinear Dynamics and Chaos : With applications to physics,
biology, chemistry, and engineering, Addison-Wesley, EUA, 1994.
[30] Swokowski E. W., Calculus with Analytic Geometry, PWS Publishers, EUA,
1988.
[31] Tang K.S., Man K.F., Zhong G.Q., Chen G., Generating chaos via x|x|, IEEE
Trans. on Circ. Sys.-I, Vol. 48, No. 5, pp. 636-641, 2001.
[32] Wang X. F., Chen G., Chaotifying a stable LTI system by tiny feedback control,
IEEE Trans. on Circ. Sys.-I, Vol. 47, No. 3, pp. 410-415, 2000.
[33] Wang X. F., Chen G., Chaotification via arbitrarily small feedback controls, Int. J.
of Bifur. Chaos, Vol. 10, No. 3, pp. 549-570, 2000.
[34] Wang X. F., Chen G., Generating topologically conjugate chaotic systems via
feedback control, IEEE Trans. Circ. Sys.-I, Vol. 50, No. 6, pp. 812-817, 2003.
[35] Wang X. F., Chen G., On feedback anticontrol of discrete chaos, Int. J. of Bifur.
Chaos, Vol. 9, No. 7, pp. 1435-1442, 1999.
[36] Wang X. F., Chen G., Yu X., Anticontrol of chaos in continuous-time systems via
time-delay feedback, Chaos, Vol. 10, No. 4, pp. 771-779, 2000.
[37] Yang L., Liu Z. R., Chen G., Chaotifying a continuous-time system via impulsive
input, Int. J. of Bifur. Chaos, Vol. 12, No. 5, pp. 1121-1128, 2002.
[38] Zhong G.Q., Man K.F., Chen G., Generating chaos via a dynamical controller, Int.
J. Bifur. Chaos, Vol. 11, No. 3, pp. 865-869, 2001.
69