Notas del curso Cadenas de Markov - EMALCA
Anuncio

Notas del curso
Cadenas de Markov: Una introducción
Stella Brassesco
Departamento de Matemáticas, Instituto Venezolano de Investigaciones
Cientı́ficas, Apartado Postal 20632 Caracas 1020–A, Venezuela
sbrasses@ivic.gob.ve
EMALCA– El Salvador
29 de mayo al 9 de Junio de 2011
1
1.
Introducción
Sea {Ω, F, P } un espacio de probabilidad, y denotemos por ω a los elementos de Ω.
Un proceso estocástico es una familia {Xt }t∈T de variables aleatorias indexadas en T , que puede ser un conjunto discreto, por ejemplo {0, 1, 2, · · · },
o continuo, como por ejemplo el intervalo [0, 1] o el conjunto de los números
reales R. Se utilizan como modelos para la evolución del estado de un sistema
cuando la dinámica es de alguna forma aleatoria, o depende de factores que
no se conocen bien. En estos casos se piensa t como el tiempo, y se dice que
X está en el estado a en el tiempo t cuando Xt = a.
Supongamos T = N, y consideremos un proceso {Xi }i∈N . Una trayectoria
de este proceso es la sucesión {Xi (ω)}i∈N , que corresponde a una realización u
observación particular a lo largo del tiempo. Estamos interesados en estudiar
caracterı́sticas de estas trayectorias, tales como
¿ Cuántas veces pasa por un determinado estado antes de un tiempo T
dado?
¿ Cuál es la distribución del máximo del proceso hasta cierto N dado?
¿ Cuánto vale es la esperanza del tiempo que tarda en el proceso en alcanzar
un nivel dado A?
Ejercicio Describa matemáticamente los eventos de las preguntas anteriores,
en términos de un proceso Xn .
2.
El paseo aleatorio
Uno de los procesos más básicos es el paseo aleatorio simple en Z, que
describe la posición de una partı́cula que se mueve en una lı́nea, y en cada
unidad de tiempo da un paso de tamaño 1, o bien a la derecha o bien a la
izquierda, con probabilidad p y 1 − p respectivamente, donde p ∈ (0, 1).
Matemáticamente, Xn se expresa ası́:
Xn = X0 + ξ1 + ξ2 + · · · + ξn
2
(2.1)
donde X0 es la posición inicial, y {ξi }i∈N son variables aleatorias independientes definidas en {Ω, F, P }, y tales que P (ξi = 1) = 1 − P (ξi = −1) = p.
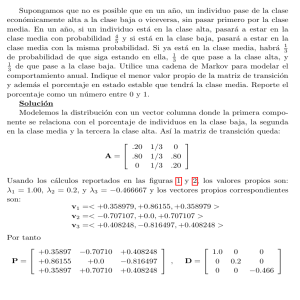
Podemos representar gráficamente los primeros 14 pasos de una trayectoria:
Figura 1: Gráfico de los primeros 14 pasos de un paseo aleatorio simétrico
con posición inicial 2.
En caso de que p = 12 , el paseo se dicesimétrico. Supongamos que X0 = 0.
Podemos calcular EXn = n p − (1 − p) , y V arXn = 4np (1 − p). Más aún,
se puede calcular P (Xn = k), para cada n y k en N. Como cada paso tiene
tamaño 1, es claro que si |k| > n o bien k tiene paridad distinta de la de n,
entonces P (Xn = k) = 0. En los otros casos, Xn = k significa que la partı́cula
da D pasos a la derecha e I pasos a la izquierda, de forma que D − I = k.
Como D + I = n, tenemos que D = n+k
de modo que el evento (Xn = k)
2
n+k
resulta igual al evento (D = 2 ). Pero
n+k
n−k
n+k
n
) = n+k p 2 (1 − p) 2
P (D =
2
2
que corresponde a contar cuantas trayectorias del paseo en [0, n] pueden
dar n+k
pasos a la derecha (y por lo tanto n−k
pasos a la izquierda), y
2
2
n+k
n−k
multiplicarlas por la probabilidad de cada una de ellas, que es p 2 (1−p) 2 .
Hemos demostrado entonces lo siguiente:
Proposición 2.1. Sea Xn un paseo aleatorio en Z, con P (ξi = 1) = p, y
3
X0 = 0. Entonces
n+k
n−k
n
n+k p 2 (1 − p) 2
2
P (Xn = k) =
0
si |k| < n, y si
n y k tienen la misma paridad
en caso contrario
Veamos un ejemplo de aplicación de lo anterior al cálculo de una probabilidad que tiene que ver con la trayectoria completa del paseo hasta un
cierto instante.
Problema 2.2. Supongamos que tenemos un paseo simétrico, con condición
inicial X0 = a > 0, y sea b > a, y n ∈ N ¿ Cuál es la probabilidad de que el
paseo esté en el estado b en el tiempo n, sin haber tocado el 0?
Una interpretación de la situación anterior que es frecuente es la siguiente:
supongamos que un jugador cuya fortuna inicial es a juega un juego justo,
donde si pierde paga 1 y si gana recibe 1, de modo que su fortuna Xn a lo
largo del tiempo describe un paseo simétrico. En este lenguaje, la pregunta
es cuál es la probabilidad de que su fortuna en el tiempo n sea b sin haberse
arruinado antes. Para responderla, observamos
P (Xn = b, Xn−1 6= 0, Xn−2 6= 0 · · · X1 6= 0|X0 = a) =
P (Xn = b|X0 = a) − P (Xn = b, Xj = 0 para algún j ∈ (1, n − 1)|X0 = a)
Ahora bien, usando la proposición anterior, obtenemos
n
P (Xn = b|X0 = a) = P (Xn = b − a|X0 = 0) =
n+b−a
2
2n
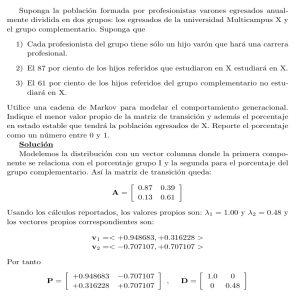
Con respecto a la probabilidad de que el paseo llegue a b habiendo visitado
el 0, observamos, como en la siguiente figura, que a cada trayectoria que llega
desde a hasta b tocando el 0 corresponde una trayectoria que llega desde a
al reflejado de b respecto del 0. Como todas las trayectorias hasta n tienen
la misma probabilidad ( 21n ) tenemos que
P (Xn = b, Xj = 0 para algúnj ∈ (1, n − 1)|X0 = a) =
P (Xn = −b|X0 = a) = P (Xn = −b − a|X0 = 0)
4
(2.2)
Figura 2: Trayectoria reflejada en la barrera 0
de modo que finalmente la respuesta al problema es
n
P (Xn = b − a) − P (Xn = −b − a) =
n+b−a
2
2n
n
−
n−b−a
2
2n
La propiedad que nos permitió calcular (2.2) se conoce como principio de
reflexión.
Consideremos ahora un paseo aleatorio Xn . Recordando (2.1) observemos
que, por ejemplo,
P (X4 = 2 | X3 = 1, X2 = 2, X1 = 1, X0 = 0) =
P (X3 + ξ4 = 2 | X3 = 1, X2 = 2, X1 = 1, X0 = 0) = P (X4 = 2 | X3 = 1)
(2.3)
Esta propiedad, extendida a tiempos y estados cualesquiera, se llama
propiedad de Markov.
Ejercicio
1. Considere un paseo aleatorio Xn como en (2.1), con P (ξ1 = 1) = p,
P (ξ1 = −1) = q := (1 − p) y X0 = k ∈ (0, A).
5
Defina uk = P (Xn llegue a 0 antes que aA | X0 = k). (En lenguaje de juego, la probabilidad de que el jugador se arruine antes de
obtener una fortuna A cuando su fortuna inicial es k). Muestre
que, si p 6= q,
(q/p)k − (q/p)A
uk =
1 − (q/p)A
Sug: Verifique que uk satisface la recurrencia uk = p uk+1 + q uk−1
si k ∈ (1, A−1), con las condiciones de contorno u0 = 1 y uA = 0,
y resuelva esta recurrencia.
Calcule vk := P (Xn llegue a A antes que a 0 | X0 = k).
Verifique que uk + vk = 1
Calcule uk y vk en el caso p = 21 .
¿Cuánto vale P Xn ∈ (0, A)∀ n ≥ 0 ?
Suponga p > q. Calcule lı́mA→∞ vk .
3.
Definiciones y propiedades básicas
Definición 3.1. Un proceso Xn a valores en un espacio S satisface la
propiedad de Markov si
P (Xn+1 = j|Xn = i, Xn−1 = in−1 , · · · , X0 = i0 ) = P (Xn+1 = j|Xn = i)
∀n ∈ N, ∀i0 , i1 , · · · in−1 , i, j ∈ S tales que las probabilidades en la igualdad
anterior están definidas.
Un proceso de Markov homogéneo es un proceso de Markov tal que
P (Xn+1 = j|Xn = i) no depende de n.
Una cadena de Markov es un proceso de Markov a tiempo discreto con
espacio de estados S finito o numerable.
***
Consideraremos en lo que sigue cadenas de Markov homogéneas.
***
6
Un análisis como el de (2.3) muestra que el paseo aleatorio es una cadena
de Markov homogénea con espacio de estados Z.
Si Xn es una cadena de Markov homogénea, las probabilidades de transición del estado i al estado j las denotaremos P (i, j) := P (X1 = j|X0 = i).
Se acostumbra acomodarlas en forma matriz
P := {P (i, j)}i,j∈S
Si n es el número de elementos de S, es una matriz de n × n. Si S no es
finito, será una matriz infinita. P se llama matriz de transición asociada a la
cadena de Markov Xn , y es claro que se cumple
X
P (i, j) = 1, y que 0 ≤ P (i, j) ≤ 1 ∀i, j ∈ S
j∈S
Toda matriz con estas propiedades se llama matriz estocástica.
Veremos que esta determina, junto con la condición inicial, la ley de la
cadena {Xn }, y que por otro lado, dadas una condición inicial y una matriz estocástica P, existe una cadena de Markov Xn (es decir, un espacio de
probabilidad {Ω, F, P } donde hay definido un proceso {Xn }n∈N a valores en
S, que satisface la propiedad de Markov), cuya matriz de transición es la P
dada.
Si Xn es una cadena de Markov homogénea en un espacio de estados
S, y ei ∈ S, i = 0, 1, · · · , por la definición de probabilidad condicional y la
propiedad de Markov 3.1 tenemos que, ∀n:
P (Xn = en , Xn−1 = en−1 , Xn−2 = en−2 , · · · , X0 = e0 ) =
P (Xn = en Xn−1 = en−1 , Xn−2 = en−2 , · · · , X0 = e0 )×
P (Xn−1 = en−1 , Xn−2 = en−2 , · · · , X0 = e0 ) =
P (en−1 , en ) P (Xn−1 = en−1 , Xn−2 = en−2 , · · · , X0 = e0 ) = · · ·
n
Y
P (ei , ei−1 ) P (X0 = e0 )
i=1
Observemos que el conjunto de todas las probabilidades como en la primera
lı́nea arriba, para cualesquiera conjuntos de estados, y n ∈ N determina la
distribución de la cadena Xn . Por la última expresión obtenida, tenemos
entonces lo siguiente:
7
Proposición 3.2. La distribución de Xn queda determinada por la matriz
de transición P = {P (i, j)}i,j∈S y la distribución inicial de X0 .
Podemos entonces referirnos a la cadena de Markov con matriz P y condición inicial X0 . Esta condición inicial puede ser una variable aleatoria, o, en
particular, un valor fijo en el espacio S. Supongamos que X0 se distribuye de
manera que P (X0 = i) = µ(i), i ∈ S (lo cual suele denotarse por X0 ∼ µ) En
este caso, escribiremos Pµ cuando se quiera hacer explı́cita la distribución de
la condición inicial:
X
Pµ (Xn = j) =
P (Xn = j|X0 = i)µ(i)
i∈S
Con un ligero abuso de notación, escribimos Pi cuando X0 = i. Análogamente, Eµ y Ei denotarán la esperanza condicional cuando el estado inicial
es µ o i, respectivamente.
De la propiedad de Markov podemos calcular las probabilidades de transición en dos pasos, que denotaremos por P (2) :
P (2) (i, j) := P (X2 = j|X0 = i) =
=
X
X
P (X2 = j, X1 = k|X0 = i)
k∈S
P (X2 = j, X1 = k, X0 = i)/P (X0 = i)
k∈S
=
X
P (X2 = j|X1 = k, X0 = i) P (X1 = k, X0 = i)/P (X0 = i)
k∈S
=
X
P (X2 = j|X1 = k) P (X1 = k|X0 = i) =
X
P (k, j) P (i, k) = P2 (i, j)
k∈S
k∈S
donde P2 (i, j) es la entrada (i, j) de la matriz P elevada al cuadrado. Por
inducción obtenemos facilmente que la probabilidad de transición en n pasos
viene dada por
P (Xn = j|X0 = i) = Pn (i, j),
donde Pn (i, j) es la entrada (i, j) de la n-ésima potencia de la matriz P. A la
matriz Pn se le llama matriz de transición en n pasos. Observe que denotamos
P (n) (i, j) = Pn (i, j).
8
La siguiente proposición muestra como obtener cadenas de Markov por
recurrencia a partir de una
sucesión de variables i.i.d. definidas en un espacio
de probabilidad Ω, F, P . Veremos que, además de resultar de utilidad para
implementar algoritmos de generación con un computador, también engloba
la mayorı́a de los ejemplos a considerar.
Proposición 3.3. Sea {Yn }n≥1 una sucesión de variables aleatorias independientes definidas en cierto espacio Ω, F, P . Sea S un conjunto finito o
numerable, y F : S × R → S una función. Sea X0 una variable aleatoria con
valores en S, independiente de {Yn }n≥1 , y sea Xn definida por recurrencia
ası́:
Xn+1 = F (Xn , Yn+1 )
(3.1)
Entonces Xn es una cadena de Markov homogénea.
Demostración Es claro que la recurrencia planteada genera un proceso a
valores en S. Resta verificar la propiedad de Markov. Tenemos:
P Xn+1 = j|Xn = i, Xn−1 = in−1 , · · · X0 = i0 =
(3.2)
P F (Xn , Yn+1 ) = j|Xn = i, Xn−1 = in−1 , · · · X0 = i0 =
P F (i, Yn+1 ) = j = P F (Xn , Yn+1 ) = j|Xn = i = P Xn+1 = j|Xn = i
Para escribir la tercera igualdad observamos que, iterando la recurrencia,
se concluye que Xn es una función de X0 y de {Yj }nj=1 .
Como P F (i, Yn+1 ) = j no depende de n, tenemos que la cadena de
Markov definida por (3.1) es homogénea.
Antes de ver algunos ejemplos, veamos como se puede aplicar la proposición anterior, mostrando una particular función F y sucesión de variables
aleatorias {Un } tal que Xn+1 = F (Xn , Un+1 ) y de modo que las transiciones
son dadas por P.
Supongamos que S = {1, 2, 3 · · · N }, sean Un i.i.d. uniformes en [0, 1].
Para definir F , definimos una familia de particiones del intervalo [0, 1], como
sigue:
Asociamos con la primera fila de la matriz una partición del intervalo [0, 1]
en N intervalos disjuntos I1,1 , I1,2 , · · · I1,N de longitudes P (1, 1), P (1, 2) · · · P (1, N ).
Análogamente, a la fila j, asociamos una partición del intervalo [0, 1] en N intervalos disjuntos Ij,1 , Ij,2 , · · · Ij,N de tamaños P (j, 1), P (j, 2) · · · P (j, N ). Sea
9
entonces F : S × [0, 1] → S definida por:
X
F (i, x) =
j 1IIi,j (x)
(3.3)
j∈S
Con la receta de la proposición 3.3 tenemos que
Xn+1 = F (Xn , Yn+1 )
(3.4)
es una cadena de Markov, y de (3.2) sigue que
P (Xn+1 = j|Xn = i) = P (F (i, Un+1 ) = j) = P (Un+1 ∈ Ii,j ) = P (i, j)
Ejemplo. Consideremos la matriz de transición P dada en la siguiente figura. Un posible conjunto de particiones del intervalo [0, 1] es mostrado a la
derecha. Observe que los intervalos I2,2 , I2,3 I3,1 e I3,4 son vacı́os.
P=
1
8
1
2
1
8
1
4
1
2
0
0
1
2
0
1
5
4
5
0
1
4
1
4
1
4
1
4
I1,1
I1,2
( )[
I2,1
(
(
(
I3,2
I1,3
)[ )[
I2,4
)[
I3,3
)[
I4,1
I1,4
)[
I4,2
)[
I4,3
]
]
]
)[
I4,4
]
Para obtener una realización de la cadena correspondiente en S = {1, 2, 3, 4},
dada la condición inicial X0 , simplemente aplicamos la fórmula (3.4). Por
ejemplo, tomando la primera muestra de uniformes (aproximadas) que aparece
en el listado del Apéndice, en este ejemplo, tomando X0 = 2, obtenemos la
siguiente realización de los primeros 10 pasos: 2, 1, 4, 3, 3, 3, 2, 4, 3, 3, 3.
Comentario 3.4. La función F mostrada arriba no es de ninguna manera
la única posible. Encontraremos más adelante situaciones en que será conveniente escoger otra función F .
10
4.
Algunos ejemplos clásicos
Consideramos primero algunas variaciones del paseo aleatorio.
Paseo aleatorio con barreras
Sean A, B ∈ Z dos valores donde se localiza una barrera. Sea X0 ∈ Z, A <
X0 < B. Xn será entonces la posición de una partı́cula que realiza un paseo
igual que antes, excepto cuando llega a A o a B. En particular tenemos
* Barreras absorbentes Al llegar a A o a B, el paseo queda absorbido por
esos estados, es decir,
p si A < i < B, j = i + 1
q si A < i < B, j = i − 1
P (i, j) = 1 si i = A, j = A
1 si i = B, j = B
0 en todos los otros casos
* Barreras reflejantes Al llegar a A o a B, el paseo es reflejado por esos
estados, es decir,
p si A < i < B, j = i + 1
q si A < i < B, j = i − 1
P (i, j) = 1 si i = A, j = A + 1
1 si i = B, j = B − 1
0 en todos los otros casos
El paseo aleatorio con barreras absorbentes 0 y B suele interpretarse como
la fortuna de un jugador que en cada unidad de tiempo apuesta 1 para
participar en un juego justo, y que se retira o bien porque se arruina ( llega
a 0, o bien alcanza un nivel prefijado B. Por eso se habla de problemas de
ruina para referirse a problemas de llegada a las barreras. En el libro [5] se
puede encontrar un estudio detallado del paseo aleatorio.
Paseo aleatorio simétrico en un grafo Consideremos un grafo conexo
dado, con vértices Vi , 1 = 1, 2, · · · , n y algunas aristas que los unen. El pro11
ceso Xn toma valores en el conjunto de los vértices, y
(
1
si hay una arista entre Vi y Vj
P (Vi , Vj ) = di
0 en todos los otros casos,
donde di es el número de vecinos de i, es decir, el número de vértices conectados por aristas con i.
Este proceso se conoce como modelo para ratones en laberintos.
Modelo de Eherenfest Supongamos que se tienen M bolas numeradas
de 1 a M , que están repartidas en dos recipientes A y B. En cada unidad de
tiempo, se sortea un número al azar entre 1 y M , y la bola con ese número
se cambia de recipiente: si estaba en A se coloca en B, y viceversa. Sea Xn
el número de bolas en el recipiente A.
En este caso, tenemos
P (i, i+1) =
M −i
M
P (i, i−1) =
i
M
y cero en todos los demás casos
Este proceso fue propuesto por P. y T. Eherenfest a comienzos del siglo
XX como un modelo simplificado que pudiera aclarar la aparente contradicción que surgió al tratar de explicar algunos fenómenos fı́sicos (como el comportamiento de un gas en un recipiente cerrado). Por un lado, se esperaba
que el sistema fuese reversible y recurrente, al considerarlo como un sistema
con muchas partı́culas y aplicar las leyes de la fı́sica clásica. Por otro, se
debı́an aplicar las leyes de la termodinámica, que implican convergencia al
equilibrio y decaimiento de la entropı́a. Un análisis detallado de este modelo,
ası́ como de las motivaciones para su formulación puede encontrarse en [7] o
en el trabajo original de los Ehrenfest [4]
Cadenas de nacimiento y muerte Una cadena de nacimiento y muerte
es una cadena Xn con espacio de estados N tal que, para ciertos pi , qi no
negativos, i = 0, 1, 2, · · · ,
P (i, i + 1) = pi
P (i, i − 1) = qi
y cero en todos los demás casos
Xn se puede interpretar como el tamaño de una población donde en cada
unidad de tiempo o bien nace o bien muere un individuo, con probabilidades
pi o qi (que dependen del número i de individuos en ese instante).
12
Castillo de naipes o cadena de nacimiento y desastre El espacio
de estados para este proceso es N, y supongamos dados
α1 , α2 , · · ·
0 < αi < 1.
Las probabilidades de transición son dadas por
P (k, k + 1) = αk ,
P (k, 0) = 1 − αk si k ≥ 1,
P (0, 1) = 1
y cero en los demás casos. En palabras, del estado k el proceso pasa a k + 1
o a 0, con probabilidades αk y 1 − αk , respectivamente. ¿Puede dar una
interpretación para el nombre de este proceso?
Un modelo genético: modelo de Wright–Fisher. Supongamos que
se tiene una población con un número finito fijo 2M de genes, que pueden ser
de tipo a o de tipo A. El tiempo se mide en generaciones, e interesa considerar
el número de genes del tipo A en la n-ésima generación, Xn . Para cada uno de
los 2M genes de la la generación n + 1, se escoge su tipo independientemente
de entre los tipos presentes en la generación n, con probabilidad dada por la
frecuencia relativa de cada tipo, de forma que las probabilidades de transición
son
2M
i j 2M − i 2M −j
P (Xn+1 = j|Xn = i) =
j
2M
2M
En el libro [11] hay varios ejemplos y una motivación para este y otros modelos relacionados con genética de poblaciones, ası́ como una lista de referencias
sobre el tema.
5.
Clasificación de estados y dinámica global
de una cadena de Markov
Una manera de visualizar una cadena de Markov es mediante un grafo
cuyos vértices son los estados de la cadena. Se coloca una flecha del estado i
al estado j si P (i, j) > 0, y no se coloca flecha en los casos en que P (i, j) = 0.
Las probabilidades de transición P (i, j) pueden o no colocarse como etiquetas
sobre las flechas. Por ejemplo, para el paseo aleatorio con 5 estados y barreras
absorbentes, se tiene el siguiente grafo asociado.
13
R
R
R
E3
E4
E5 E1
E2
I
I
I
Aquellas propiedades de la cadena que dependen apenas del grafo sin
etiquetas se dicen topológicas. Veremos algunas de ellas.
Definición 5.1. El estado j de una cadena de Markov Xn se dice accesible
desde el estado i si existe N > 0 tal que P (N ) (i, j) > 0. Si j es accesible
desde i e i es accesible desde j, diremos que i y j se comunican, lo cual se
denota por i ↔ j.
Como P (0) (i, i) = 1, todo estado es accesible desde sı́ mismo. Es fácil ver
que ↔ establece una relación de equivalencia en S, y como tal lo divide en
clases disjuntas que se llaman clases comunicantes.
Definición 5.2. Si sólo hay una clase comunicante, la cadena se dice irreducible.
Definición 5.3. Un conjunto C de estados se dice cerrado si ∀i ∈ S,
X
P (i, j) = 1
j∈C
Ejemplos En el ejemplo del paseo aleatorio con 5 estados y barreras
absorbentes cuyo grafo esta dibujado más arriba, tenemos que {E1 } y {E5 }
constituyen dos clases cerradas, y {E2 , E3 , E4 } constituyen una clase comunicante.
Es fácil ver que en cambio los estados de un paseo aleatorio con barreras reflejantes se comunican todos entre sı́ por lo que esta cadena resulta
irreducible.
Recurrencia y transitoriedad.
Una variable aleatoria importante para el estudio de la dinámica de una
cadena de Markov Xn es el tiempo de llegada al estado i ∈ S,
Ti = ı́nf{n ≥ 1 : Xn = i}
14
Definición 5.4. El estado i se dice recurrente si
Pi (Ti < ∞) = 1
y transitorio si Pi (Ti < ∞) < 1.
Un estado recurrente se dice recurrente positivo si Ei (Ti ) < ∞ y recurrente nulo si Ei (Ti ) = ∞
Proposición 5.5. Sea Xn una cadena de Markov en S, i ∈ S y Ti < ∞
el tiempo de llegada a i. Entonces el proceso {XTi +n }n≥0 es una cadena de
Markov con condición inicial i, independiente de la cadena antes de Ti , XTi ∧n .
Demostración
Claramente XTi +0 = i. Veamos la propiedad de Markov para XTi +n .
P XTi +n+1 = k XTi +n = j, XTi +n−1 = jn−1 , · · · , XTi = i
X P XTi +n+1 = k, XTi +n = j, XTi +n−1 = jn−1 , · · · XTi = i, Ti = r
=
P XTi +n = j, XTi +n−1 = jn−1 , · · · , XTi = i
r≥1
En vista de la propiedad de Markov (observe que Ti = r se puede expresar
en términos de {Xk }k≤r ), el numerador en esta última expresión se puede
escribir como
P Xr+n+1 = k Xr+n = j, Xr+n−1 = jn−1 , · · · XTi = i, Ti = r ×
P XTi +n = j, XTi +n−1 = jn−1 , · · · , Xr = i, Ti = r =
P Xr+n+1 = k Xr+n = j P XTi +n = j, XTi +n−1 = jn−1 , · · · , XTi = i, Ti = r
= P (j, k) P XTi +n = j, XTi +n−1 = jn−1 , · · · , XTi = i, Ti = r ,
y entonces
P XTi +n+1 = k XTi +n = j, XTi +n−1 = jn−1 , · · · , XTi = i = P (j, k)
La verificación de la segunda afirmación sigue de un argumento similar.
Dado i ∈ S, sea r(i) la probabilidad de que el tiempo del primer retorno
al estado i sea finito, y sea N (i) en número de veces que la cadena pasa por
el estado i:
X
N (i) =
1I{Xn =i}
r(i) = Pi Ti < ∞
n≥1
15
Proposición 5.6. Sean Ti y N (i) como arriba. Entonces,
a) Si r(i) < 1 entonces Pi N (i) = ∞ = 0 y E N (i) =
b) Si r(i) = 1 entonces Pi N (i) = ∞ = 1
r(i)
.
1−r(i)
Demostración Con ayuda de la proposición 5.5, no es difı́cil ver que
Pi N (i) = k = r(i)k 1 − r(i)
de modo que si r(i) < 1
X
Pi N (i) = ∞ = 1 −
r(i)k 1 − r(i) = 1 − 1 = 0
y
k≥0
X
E N (i) =
k r(i)k 1 − r(i) =
k≥1
X
d
r(i)
k r(i)k−1 =
r(i) 1 − r(i)
dr(i) k≥1
1 − r(i)
Una forma de verificar recurrencia de un estado es dada por la siguiente
proposición
Proposición 5.7. El estado i es recurrente ⇔
X
P (n) (i, i) = ∞
n≥0
Demostración De la proposición anterior tenemos que el evento N (i) = ∞
tiene probabilidad 0 o 1. Xn es una cadena
con estado inicial i recurrente
⇔ r(i) = 1 ⇔ N (i) = ∞ c.s. ⇔ Ei N (i) = ∞. Pero
X
X
Pi (Xn = i) =
P (n) (i, i)
Ei N (i) =
n≥1
n≥1
También se cumple que todos los estado de una misma clase comunicante
tienen las mismas propiedades de recurrencia. Precisamente
16
Proposición 5.8. Si i ↔ j, entonces o bien ambos estados son recurrentes,
o bien ambos estados son transitorios.
Demostración Sean i, j ∈ S, i ↔ j. Entonces existen M, N tales que
P (M ) (i, j) > 0, P (N ) (j, i) > 0. Para cada k > 0 podemos escribir
P (M +N +k) (i, i) ≥ P (M ) (i, j) P (k) (j, j) P (N ) (j, i)
P (M +N +k) (j, j) ≥ P (N ) (j, i) P (k) (i, i) P (M ) (i, j)
(5.1)
ya que en los lados izquierdos se tienen las probabilidades de retornar al
estado en M + N + k pasos y en la derecha
formas particulares
de hacerlo.
P
P
De estas desigualdades se concluye que n≥0 P (n) (i, i) y n≥0 P (n) (j, j) son o
bien ambas divergentes, o bien ambas convergentes, lo cual por la proposición
5.7 significa ambos estados recurrentes o ambos transitorios.
Dada una cadena de Markov, podemos entonces descomponer el espacio
de estados S = R ∪ T , R el conjunto de los estados recurrentes, y T el de los
estados transitorios. R a su vez puede descomponerse en clases comunicantes
disjuntas y cerradas (según la definición 5.3) R = R1 ∪R2 ∪· · · , y la dinámica
podemos simbolizarla ası́ :
'$ '$ '$
R2
R1
R3
···
&%
&%
&%
I
6
T
Reordenando los estados si es necesario, la matriz de transición luce ası́ :
R1
R2
R3
T
P1
P2
17
O
P3
∗
Si la condición inicial está en alguna de las Ri , entonces la cadena en el
futuro tomará valores solamente en Ri , y podemos considerar la dinámica
restringida a este espacio, con matriz de transición correspondiente siendo el
i-ésimo bloque (Pi en el diagrama anterior). Si el estado inicial es transitorio,
la cadena podrá eventualmente alcanzar R, y llegar a la situación anterior, o
bien quedarse en T para siempre. Esto sólo puede suceder si la cadena tiene
infinitos estados transitorios. (¿Por qué?)
Interesa entonces estudiar la dinámica de cadenas recurrentes e irreducibles.
Ejercicios
1. Muestre que si R es una clase comunicante recurrente, entonces es
cerrada.
2. Encuentre una cadena de Markov que tenga infinitos estados transitorios.
3. Muestre que si i, j son dos estados transitorios, entonces P (n) (i, j) → 0
cuando n → ∞.
4. Considere el paseo simétrico en Z. Diga si es irreducible. Considere el
estado 0. ¿Es recurrente?
5. Considere el paseo asimétrico, y responda las mismas preguntas del
item anterior.
6. Considere la cadena para el modelo genético de la sección 4. Dibuje
el grafo de transiciones correspondiente, y diga cuales son sus clases
comunicantes. ¿ Puede clasificarlas en recurrentes o transitorias?
7. Considere la cadena de Markov del castillo de naipes.
Muestre que todos los estados son recurrentes ⇔
Y
lı́m α1 α2 · · · αn =
αi = 0
n→∞
i≥1
Suponga que todos los estados son recurrentes. Muestre que son
recurrentes nulos ⇔ 1 + α1 α2 + α1 α2 α3 + · · · → ∞
18
6.
Distribución invariante
Definición 6.1. Una distribución de probabilidad µ en S es invariante (o
estacionaria) para una cadena de Markov en S con matriz de transición
P = {P (i, j)} si
X
∀j ∈ S
se cumple que
µ(j) =
µ(i) P (i, j)
(6.1)
i∈S
Observe que µ puede pensarse como un vector µ(i), i ∈ S, cuyas componentes satisfacen
X
µ(i) ≥ 0
y
µ(i) = 1
i∈S
Las ecuaciones (6.1) en notación vectorial, con µ escrito como vector fila
pueden escribirse como
µ = µP
y la definición de distribución invariante es equivalente a decir que µ es un
autovector a izquierda con autovalor 1. Podrı́amos entonces apelar al teorema
de Perron–Frobenius, que garantiza la existencia de un tal autovector, al
menos en el caso de P finita y positiva. (Ver por ejemplo [3]).
Sin embargo, veremos que se puede concluir también la existencia de una
tal distribución, y más aún caracterizarla usando la dinámica de la cadena
de Markov correspondiente a la matriz P.
Una primera propiedad de la distribución invariante es que es en efecto
invariante para la cadena, en el sentido de que si X0 tiene distribución µ,
entonces Xn , tendrá distribución µ para todo n ≥ 0. Veamos
X
Pµ (X2 = j) =
P (x2 = j|X0 = i) µ(i)
i∈S
=
XX
P (X2 = j, X1 = k|X0 = i) µ(i)
i∈S k∈S
=
XX
P (X2 = j|X1 = k, X0 = i) P (X1 = k|X0 = i) µ(i)
i∈S k∈S
=
X
k∈S
P (k, j)
X
P (i, k)µ(i) =
i∈S
X
P (k, j)µ(k) = µ(j)
k∈S
Se ha usado la descomposición del evento inicial según la posición en el primer
paso, la propiedad de Markov y la definición de invariancia. Inductivamente,
19
se obtiene de la misma forma que Pµ (Xn+1 = j) = µ(j). Más aún, para todo
k y conjunto de estados i0 , i1 , · · · ik ,
Pµ (Xn = i0 , Xn+1 = i1 , · · · , Xn+k = ik ) = µ(i0 )P (i0 , i1 )P (i1 , i2 ) · · · P (ik−1 , ik )
no depende de n, y la cadena está en régimen estacionario.
Ejemplo 6.2. Consideremos la cadena con dos estados, cuya matriz de transición es
p
1−p
(6.2)
1−q
q
En este caso, las ecuaciones (6.1) se reducen al sistema de 2 × 2
µ(1) = pµ(1) + (1 − q)µ(2)
µ(2) = (1 − p)µ(1) + qµ(2)
Cuya solución, en caso p 6= 1 o q 6= 1 es
1−q
(1 − p) + (1 − q)
1−p
µ(2) =
(1 − p) + (1 − q)
µ(1) =
En el caso p = q = 1, cualquier distribución de probabilidades µ en S es
invariante.
Ejemplo 6.3. Considere el paseo con barreras absorbentes en
S = {0, 1, 2, 3 · · · , N }
(El grafo para el caso particular N = 4 está dibujado en la sección 5). Definimos δK la distribución que asigna probabilidad 1 al estado K (y por consiguiente, 0 a los otros). Es fácil verificar que δ0 es una distribución invariante,
y también lo son δN y cualquier combinación λδ0 + (1 − λ)δN , λ ∈ [0, 1].
Ejemplo 6.4. Consideremos el paseo aleatorio simétrico simple en Z, y
supongamos que tiene una distribución invariante µ. Esta tiene que satisfacer las ecuaciones: si j ∈ Z
µ(j) =
1
1
µ(j + 1) + µ(j − 1)
2
2
=⇒ µ(j + 1) − µ(j) = µ(j) − µ(j − 1)
20
Como
µ(j + 1) = µ(j + 1) − µ(j) + µ(j) − µ(j − 1) · · · + µ(1) − µ(0) + µ(0)
obtenemos de la recurrencia anterior que
µ(j + 1) = (j + 1) µ(1) − µ(0) + µ(0)
Como µ(j) ∈ [0, 1] ∀j ∈ Z, tiene que ser µ(1) − µ(0) = 0, de modo que
µ(j + 1) = µ(0)
P ∀j, pero entonces no se puede satisfacer la condición de
normalización i∈Z µ(i) = 1, de forma que no existe ninguna distribución
invariante para el paseo simétrico simple en Z.
Ejemplo 6.5. Sea una cadena de nacimiento y muerte con barreras reflejantes en 0 y N , es es decir, S = {0, 1, 2, · · · , N } y probabilidades de transición
P (i, i + 1) = pi , P (i, i − 1) = qi , pi + qi = 1,
0 < pi < 1 si 0 ≤ i ≤ N − 1, p0 = qN = 1
Si π = {πi } es una distribución invariante, por (6.1) tiene que satisfacer
πj = πj−1 pj−1 + πj+1 qj+1 ⇒ πj+1 qj+1 − πj pj = πj qj − πj−1 pj−1
pj
⇒ πj+1 qj+1 − πj pj = π1 q1 − π0 = 0 ⇒ πj+1 = πj
qj+1
Iterando obtenemos finalmente
πj+1 = π0
p1 p2 · · · p j
q1 q2 · · · qj+1
Despejando π0 de la condición de normalización
π0 = 1 +
P
πi = 1, se tiene
1
p1
p1 p2 · · · pN −1 −1
+
+ ··· +
q1 q1 q2
q1 q2 · · · qN
lo que termina el cálculo de π.
Como se ve de los ejemplos anteriores, la distribución invariante puede
o bien no existir en absoluto, o bien no ser única. Veremos ahora una serie
de resultados que nos permitirán establecer condiciones que garantizan la
unicidad y existencia de la misma.
21
Definición 6.6. Un vector no nulo µ(i), i ∈ S, µ(i) ∈ [0, 1] tal que µP = µ
para una matriz estocástica se dirá una medida invariante para P.
Observe que orresponde con una distribución
invariante que no está norP
malizada (es decir, no necesariamente
µi = 1).
El siguiente resultado caracteriza la forma que puede tener una medida
invariante para P en términos de la dinámica de la cadena correspondiente,
y permitirá aclarar el problema de unicidad y existencia de una distribución
invariante.
Teorema 6.7. Sea Xn una cadena de Markov irreducible y recurrente con
matriz de transición P = {P (i, j)}. Sea i0 un estado cualquiera fijo pero
arbitrario, y sea Ti0 el tiempo de retorno a i0 . Sea
X
µi = Ei0
1I{Xn =i} 1I{Ti0 ≥n}
(6.3)
n≥1
Entonces
a) µi ∈ (0, ∞).
b) µi es invariante para P.
Demostración Observamos que si i 6= i0 , µi como definido en (6.3) es la
esperanza del número de visitas a i antes de retornar a i0 , y
µi0 = P Ti0 < ∞ = 1,
ya que i0 es recurrente. Además,
XX
X
1I{Xn =i} 1I{Ti0 ≥n} = Ti0 ⇒
µi = Ei0 Ti0
i∈S n≥1
i∈S
Definimos
hn (i0 , i) = Ei0 1I{Xn =i} 1I{Ti0 ≥n} = Pi0 Xn = i, Xn−1 6= i0 , · · · X2 6= i0
Entonces h1 (i0 , i) = P (i0 , i) y descomponiendo la probabilidad anterior de
acuerdo al penúltimo paso, obtenemos
X
hn (i0 , i) =
hn−1 (i0 , j)P (j, i)
si n > 1
(6.4)
j6=i0
22
Sustituyendo en (6.3),
X
XX
µi =
hn (i0 , i) + h1 (i0 , i) =
hn−1 (i0 , j)P (j, i) + P (i0 , i)
n≥2
=
X
n≥2 j6=i0
P (j, i)µj + P (i0 , i) =
X
P (j, i)µ(j),
j∈S
j6=i0
lo que muestra b).
P Supongamos que µi = 0 para algún i ∈ S. Por la invariancia, sigue que
P (j, i)µj = 0. Como µi0 = 1, entonces P (i0 , i) = 0. Por la invariancia,
j ∈S
también ∀n ≥ 1, µ Pn = µ, y por el mismo razonamiento anterior se concluye
que P (n) (i0 , i) = 0 ∀n ≥ 1, de forma que i0 e i no se comunican. Esto
contradice la irreducibilidad de la cadena, y P
ası́ µi > 0 ∀i ∈ S.
Por la invariancia, también se tiene que j∈S P (j, i0 ) µj = 1. Si µj = ∞
para algún j, tiene que ser P (j, i0 ) = 0. Por el mismo argumento sigue que
P (n) (j, i0 ) = 0 ∀n ≥ 1, lo cual contradice la irreducibilidad de la cadena, y
entonces µi < ∞ ∀i ∈ S, con lo cual se concluye la verificación de a).
Del resultado anterior tenemos entonces la existencia de una medida invariante (que no es necesariamente normalizable a una distribución invariante). Con respecto a la unicidad, tenemos:
Teorema 6.8. La medida invariante de una cadena irreducible y recurrente
es única salvo constantes multiplicativas.
Demostración Sea Xn una cadena de Markov recurrente e irreducible con
espacio de estados S y matriz de transición P, y ν una medida invariante.
De la demostración del resultado anterior, sigue que νi > 0 ∀i. Sea
X
i∈S
Q(j, i) =
νi
P (i, j). Entonces
νj
Q(j, i) =
1 X
νj
νi P (i, j) =
=1
νj i∈S
νj
por lo que Q es una matriz estocástica. Es fácil ver por inducción que
Q(n) (j, i) = ννji P (n) (i, j), ası́ que como P es irreducible, también Q lo es.
P
P
Como n≥1 Q(n) (i, i) = n≥1 P (n) (i, i), por la proposición 5.7, Q es también
recurrente. Sea Yn una cadena de Markov con matriz Q , y sea
gn (j, i) = Pj (Yn = i, Yn−1 6= i · · · Y1 6= i)
23
(en palabras, la probabilidad de que la cadena Yn pase de j a i por primera
vez en el tiempo n). Como Yn es recurrente,
X
gn (j, i) = 1 ∀i, j
n≥1
Por otro lado, haciendo una descomposición según la posición del primer
paso,
X
X
νj
gn+1 (i, i0 ) =
gn (j, i0 )Q(i, j) =
gn (j, i0 ) P (j, i) =⇒
νi
j6=i0
j6=i0
X
νi gn+1 (i, i0 ) =
gn (j, i0 ) νj P (j, i)
(6.5)
j6=i0
Multiplicando por νi0 la fórmula (6.4), observamos que las sucesiones νi gn (i, i0 )
y νi0 hn (i0 , i) satisfacen la misma recurrencia, y además, de las definiciones,
νi g1 (i, i0 ) = νi Q(i, i0 ) = νi0 P (i0 , i) = νi0 h1 (i0 , i), de modo que
∀n ≥ 1, νi0 hn (i0 , i) = νi gn (i, i0 ).
Tomando sumatoria en n,
νi0 µi = νi
X
gn (i, i0 ) = νi ,
n≥1
de modo que ν es un múltiplo de µ como definida en (6.3).
Veamos ahora algunas consecuencias de estos resultados:
Corolario 6.9.
1. Si una cadena de Markov es recurrente e irreducible y un estado es
recurrente positivo, entonces todos lo son.
2. Una cadena de Markov recurrente e irreducible
Pes positiva recurrente
si y sólo si sus medidas invariantes satisfacen
µi < ∞.
3. Una cadena de Markov irreducible es recurrente positiva si existe una
única distribución invariante π. Más aún,
π(j) =
1
Ej Tj
24
∀j ∈ S
Demostración
1. Sea i0 el estado recurrente positivo. Tomándolo como el estado escogido
en la definición (6.3), como vimos
X
µi = Ei0 Ti0 < ∞
(6.6)
Sea otro estado i1 , y la correspondiente medida µ(1) como en (6.3) (con
i1 en vez de i0 .) Por el teorema 6.8, µ(1) es un múltiplo de µ, por lo
P (1)
que tiene que ser Ei1 Ti1 =
µi un múltiplo de Ei0 Ti0 , y por lo
tanto finita.
2. Sigue por el mismo argumento.
3. Basta normalizar como en (6.6) para obtener
π(i0 ) =
1
.
Ei0 Ti0
Como i0 fue arbitrariamente escogido, la fórmula arriba vale para cualquier
estado, y se cumple π(i) = Pµiµi .
Teorema 6.10. Una cadena de Markov irreducible es recurrente positiva si
y sólo si existe una distribución invariante .
Demostración Supongamos
que existe una distribución invariante π, es decir,
P
(n)
π
P
(i, j). Si los estados son transitorios, entonces
∀ n ∈ N, πj =
i∈S j
(n)
P (i, j) → 0 cuando n → ∞ (ver el ejercicio 3) de la sección 5). Pero
entonces πj = 0, lo cual vimos no es posible. Entonces los estados tienen que
ser recurrentes, y se está en las hipótesis del teorema 6.8, por lo que µ (como
definida en (6.3)) es un múltiplo de la π dada, de modo que, como en (6.6),
Ei0 Ti0 < ∞. El recı́proco sigue del corolario anterior.
Corolario 6.11. Una cadena de Markov irreducible con espacio de estados
finito es recurrente positiva.
Demostración
PLos estados tienen que ser recurrentes, y como S es finito,
Ei0 Ti0 =
i∈S µi < ∞, por lo que i0 es recurrente positivo, y por el
corolario 6.9, todos los estados lo son.
25
Ejercicios
1. Considere el modelo de Ehrenfest presentado en la sección 4 con 2N
bolas.
Calcule
EN +J (TN +J )
.
EN (TN )
Verifique que si j N , entonces el cociente anterior es aproxiJ
madamente 1 + NJ .
Suponga que N es muy grande (por ejemplo, N ≈ 1020 ), y sea J =
N
. Si se realiza un intercambio por segundo, calcule EN +J (TN +J ),
103
y exprese el resultado en años. Haga aproximaciones si es necesario.
2. Sea Xn una cadena de Markov en S finito, con probabilidades de transición P (i, j), sea L > 0 un entero. Definimos Yn = (Xn , Xn+1 , · · · Xn+L ),
un proceso a valores en
E = {(i0 , i1 , · · · , iL ) ∈ S L+1 : P (i0 , i1 )P (i1 , i2 ) · · · P (iL+1 , il ) > 0}.
Este proceso se conoce como cadena serpiente de largo L.
Verifique que Yn es una cadena de Markov homogénea, y calcule
sus probabilidades de transición.
Verifique Yn es irreducible si Xn lo es.
Verifique que si Xn tiene distribución invariante, también Yn la
tiene, y muestre cual es.
3. Sea P una matriz estocástica en S. Una distribución de probabilidad ν
en S se dice reversible para P si ∀ i, j ∈ S ,
ν(i) P (i, j) = ν(j) P (j, i)
Verifique que si ν es reversible, entonces es invariante.
Si Xn es un paseo aleatorio simétrico en un grafo conexo que tiene
N vértices numerados de 1 a N , y di es el número de aristas del
vértice i, verifique que la distribución ν(i) = PNdi d es reversible
i=1 i
para esta cadena.
26
Concluya que ν es invariante.
4. Discuta la existencia y unicidad de una distribución invariante en el
caso de la cadena del castillo de naipes. Sug.: Vea el ejercicio 6 de la
sección 5.
5. Discuta existencia y unicidad de una distribución invariante en el caso
de la cadena de nacimiento y muerte del ejemplo 6.5, en el caso N = ∞.
7.
Resultados ergódicos
Sea Xn una cadena de Markov en S, i0 un estado fijo, y recordemos la
definición de µi (6.3), que vimos es una medida invariante para la cadena,
X
µi = Ei0
1I{Xn =i} 1I{Ti0 ≥n} ,
n≥1
Consideramos ν(n) el número de visitas al estado i0 antes de n,
ν(n) =
n
X
1I{Xj =i0 } .
j=1
Denotemos por Xk σ la cadena con distribución inicial σ.
El siguiente resultado relaciona promedios temporales de Xn con el promedio “espacial”(en S), con respecto a la medida µ.
P
Proposición 7.1. Sea f : S → R tal que i∈S |f (i)| µi < ∞, µ y ν como
arriba. Entonces, para toda condición inicial σ,
lı́m
N →∞
N
X
1 X
f (Xk σ ) =
f (i)µ(i)
ν(N ) k=1
i∈S
con probabilidad 1
(7.1)
Demostración Sean τn los sucesivos tiempos de retorno de la cadena al estado
i0 : τ0 = Ti0 , e, inductivamente, τn+1 = ı́nf{K > τn : XK = i0 }, y sean
U` =
τ`+1
X
f (Xn ),
n=τ` +1
27
`≥0
De la proposición 5.5 sigue que {U` } es una secuencia de variables aleatorias
i.i.d. Supongamos f ≥ 0.
E U0 =E
τ0
X
τ0 X
X
f (Xn ) = Ei0
f (i)1I{Xn =i}
n=1
=
X
n=1 i∈S
X
Ti0
f (i) Ei0
X
1I{Xn =i} =
f (i)µi
n=1
i∈S
i∈S
El intercambio en el orden de las sumas está justificado por el teorema de convergencia dominada, y la última igualdad sigue simplemente de la definición
de µ. De la ley fuerte de los grandes números sabemos que, con probabilidad
1,
N
X
1 X
U` →
f (i)µi
cuando N → ∞
N `=0
i∈S
Sustituyendo la definición de U` , tenemos entonces
1
N
X
τN +1
f (Xk ) →
k=τ0 +1
X
f (i)µi
cuando N → ∞
i∈S
Como τν(N ) ≤ N < τν(N )+1 , entonces
Pτν(N )
f (Xk )
≤
ν(N )
k=1
PN
f (Xk )
<
ν(N )
k=1
Pτν(N )+1
f (Xk )
ν(N )
k=1
Por ser la cadena recurrente, ν(N ) → ∞, de forma queP
ambos extremos en
las desigualdades precedentes tienen el mismo lı́mite ( f (i)µi ), y por lo
tanto el término del medio también.
En el caso de que f no sea necesariamente positiva, se puede descomponer
en f = f + − f − , y la demostración
sigue como antes,
que por
P
P observando
−
+
la hipótesis sobre f , tanto i∈S f (i) µi < ∞ como i∈S f (i) µi < ∞ son
finitas.
Como corolario, obtenemos el teorema ergódico para cadenas de Markov:
Teorema 7.2 (Teorema Ergódico). Si Xn es irreducible, recurrente positiva
y su distribución invariante es π, entonces para toda f : S → R tal que
28
P
|f (i)| πi < ∞, se cumple que, con probabilidad 1, para cualquier configuración inicial,
N
X
1 X
lı́m
f (Xk ) =
f (i) πi
N →∞ N
i∈S
k=1
i∈S
P
Demostración Como Xn irreducible y recurrente positiva,
µi < ∞, y
P
N
vale la proposición 7.1 con f = 1, de donde ν(N
→
µ
.
Como
π y µ son
i
)
P
proporcionales, sabemos i∈S |f (i)| µi < ∞, y otra vez por la proposición
7.1,
X
1 X
lı́m
f (Xk ) =
f (i) µi =⇒
N →∞ ν(N )
i∈S
k=1
P
N
X
1 X
i∈S f (i) µi
=
f (i) πi
lı́m
f (Xk ) = P
N →∞ N
µ
i
i∈S
i∈S
k=1
N
Corolario 7.3. Si Xn es una cadena de Markov recurrente positiva con distribución invariante π, L ≥ 1 un entero, g : S L+1 → R una función dada que
satisface
X
g(i0 , i1 , · · · , iL ) πi0 P (i0 , i1 ) · · · P (iL−1 , iL ) < ∞
(i0 ,i1 ,··· ,iL ) ∈S L+1
entonces con probabilidad 1, para cualquier configuración inicial,
N
1 X
lı́m
g(Xk , Xk+1 , · · · Xk+L ) =
N →∞ N
k=1
X
g(i0 , i1 , · · · , iL ) πi0 P (i0 , i1 ) · · · P (iL−1 , iL )
(i0 ,i1 ,i2 ,··· ,iL ) ∈S L+1
Demostración Para demostrarlo, basta considerar la cadena serpiente de largo
L. (Ver Ejercicio 2 de la sección anterior).
29
Un ejemplo
Inspección de una lı́nea de producción
Suponga que se tiene una lı́nea de producción, donde cada objeto manufacturado tiene una probabilidad p de ser defectuoso. Se propone un esquema
de inspección para detectar defectos sin tener que inspeccionarlos todos. El
esquema tiene un modo A, donde cada objeto se inspecciona con probabilidad r < 1, y un modo B, donde todos son inspeccionados. Se pasa de modo
B a modo A cada vez que N objetos sin defecto han sido consecutivamente
detectados (N > 1 es un entero fijado previamente). Se pasa de modo A a
modo B cada vez que se detecta un objeto defectuoso. Sea Xn el proceso
con valores en S = {e0 , e1 , · · · eN }, donde el estado ej , j < N significa que se
está en modo B con j objetos sin defecto consecutivamente observados. El
estado eN significa que el proceso de inspección está en modo A.
La matriz de transición viene dada por
p
1−p
0
0
···
0
0
p
0
1−p
0
···
0
0
p
0
0
1−p
···
0
0
·
·
·
·
·
·
···
p
0
0
0
···
0
1−p
pr
0
0
0
···
0
1 − pr
Es fácil ver que la cadena es irreducible, y como es finita, es recurrente
positiva, ası́ que tiene una distribución invariante π = (π0 , π1 , · · · , πN ). Las
ecuaciones para π son:
π0 = p
N
−1
X
πi + p r π N
i=0
πi+1 = (1 − p)πi
i = 0, 1, · · · , N − 1
πN = (1 − pr)πN + (1 − p)πN −1
Resolviendo en términos de π0 , tenemos
πi = (1 − p)i π0
i = 1, 2, · · · , N − 1
30
πn =
(1 − p)N π0
pr
pr
De la primera ecuación, y usando la normalización, despejamos π0 = r−(1−p)
N (r−1) .
Supongamos que queremos calcular la proporción q de objetos inspeccionados en el largo plazo, y la eficiencia E del esquema de inspección , definida
por
proporción de objetos defectuosos detectados
E=
.
proporción de objetos defectuosos
Tenemos que
N
1 X
q = lı́m
1I{e1 ,e2 ,··· ,eN −1 } Xk + r 1I{eN } Xk
N →∞ N
k=1
Aplicando el Teorema 7.2 con f (i) = 1I{e1 ,e2 ,··· ,eN −1 } (i) + r 1I{eN } (i), tenemos
PN −1
que q = i=1
πi + rπN = 1 + (r − 1)πN .
Análogamente, podemos calcular la proporción de objetos defectuosos no
detectados en el largo plazo, como
p lı́m
N →∞
N
X
(1 − r)1IeN (Xk ) = p (1 − r) πN
k=1
de donde E = 1 − (1 − r)πN
Ejercicio
1. Se desea detectar la presencia en la sangre de una substancia rara, que
aparece con probabilidad muy pequeña ρ 1 en individuos de una
población muy grande. Cada análisis es muy costoso, por lo que se
procede según el siguiente esquema:
A Se toman muestras de r individuos, se mezcla una parte de cada
muestra y se analiza. Si el resultado es negativo, se reporta y se
comienza nuevamente con otros r individuos.
B Si el resultado es positivo, se analizan separadamente las muestras
de los primeros r − 1 individuos, y si todos negativos, se reportan
los resultados.
C Si algun resultado en B es positivo, se analiza la muestra restante
del r-ésimo individuo, se reportan resultados y se comienza nuevamente con otros r individuos.
31
Muestre que el esquema se puede modelar como una cadena de
Markov, indique el espacio de estados y la matriz de transición.
Los costos de los pasos A, B y C son γ, (r − 1)γ y γ respectivamente, y el numero de informes producidos es r. Calcule el
número de informes esperado y el costo esperado una vez alcanzado el equilibrio.
El cociente mencionado en el item anterior mide el rendimiento del
esquema. Tomando en cuenta que ρ 1, discuta como conviene
escoger r de forma de maximizar el rendimiento.
8.
Convergencia al equilibrio y pérdida de memoria
En el caso de Xn una cadena de Markov irreducible y recurrente positiva,
para cada estado e ∈ S, podemos tomar f = 1I{e} en el teorema ergódico, y
si llamamos π la distribución invariante obtenemos
N
1 X
1I{e} Xn → π(e)
N n=1
cuando N → ∞
con probabilidad 1, para toda condición inicial. En particular, si el estado
inicial es i, tomando esperanza,
N
N
1 X
1 X (n)
Pi (Xn = e) =
P (i, e) → π(e)
N k=1
N k=1
En otras palabras, la sucesión P (n) (i, e) converge en promedio (o en media
Cesaro) a π(e) cuando n → ∞ independientemente de la condición inicial
i. Es natural preguntarse si es verdad que P (n) (i, e) → π(e) cuando n →
∞. Con miras a aplicaciones, es también relevante estudiar la velocidad de
convergencia.
Para responder estas preguntas, usaremos el concepto de acoplamiento.
Acoplar uno (o más) procesos estocásticos consiste simplemente en construirlos en un mismo espacio de probabilidad. Esto se hace con la finalidad de
32
poder traducir, por ejemplo, comparaciones entre probabilidades referentes
a ellos en comparaciones entre eventos correspondientes, que puede resultar
conveniente dependiendo de la particular construcción.
Veamos algunos ejemplos de acoplamientos entre cadenas de Markov en
el caso particular en que ambas tienen el mismo espacio de estados S y la
misma matriz de transición P, pero el estado inicial es diferente.
En vista de la construcción de la sección 3, dados dos estados iniciales a
y b, podemos obtener ambas cadenas definidas en el mismo espacio de probabilidad simplemente tomando la familia de variables aleatorias uniformes
en el mismo espacio (Ω, F, P ) en ambos casos. Hay muchas formas de hacer
esto, por ejemplo, dada P, consideremos una función F que genere la cadena
por recurrencia como en (3.4), y procedemos como sigue:
El acoplamiento libre. Consiste en considerar ambas cadenas obtenidas
con la misma familia de uniformes {Un }n≥1 :
X0 = a Xn+1 = F (Xn , Un+1 )
X̃0 = ã X̃n+1 = F (Xn , Un+1 )
El acoplamiento de Doeblin Consiste en considerar, en un mismo
espacio, dos familias independientes de variables aleatorias independientes uniformes, {Un }n≥1 y {Ũn }n≥1 , y ası́ construir las dos cadenas
Xn y X̃n (que resultan independientes), también en el mismo espacio:
X0 = a Xn+1 = F (Xn , Un+1 )
X̃0 = ã X̃n+1 F (Xn , Ũn+1 )
Tiene sentido entonces definir la variable aleatoria “ tiempo de encuentro”
entre los dos procesos,
τ (a,b) = ı́nf{n ≥ 1 : Xn = X̃n }.
Un tercer ejemplo es el siguiente.
Acoplamiento coalescente independiente Consiste en considerar
las cadenas a partir de dos familias de uniformes independientes hasta
el tiempo τ (a,b) , y evolucionando juntas despues de τ (a,b)
Observemos que en el caso del acoplamiento libre y también del coalescente independiente, las dos trayectorias continúan juntas después de τ (a,b) .
Cuando este tiempo es finito, se puede decir que la cadena “pierde memoria”
de su condición inicial. El coeficiente de ergodicidad es una forma de medir
la tendencia de una cadena a “perder la memoria”.
33
Definición 8.1. Dada una matriz de tansición P = P (i, j) en S, se define
el coeficiente de ergodicidad β(P) como
X
β(P) =
ı́nf P (i, j)
j∈S
i∈S
Teorema 8.2. Si P es una matriz de transición en un espacio de estados S,
entonces para todo par de estados a y b en S existe un acoplamiento Xna , Xnb
de las cadenas de Markov correspondientes a P con condiciones iniciales a y
b tal que
n
P sup τ (a,b) > n ≤ 1 − β(P)
a,b∈S
Demostración Presentaremos la demostración en el caso de S finito. La extensión al caso infinito se hace siguiendo el mismo procedimiento.
Supongamos S = {1, 2, 3, · · · , N }. Se realizará un acoplamiento usando
la misma familia de uniformes y una función F convenientemente construida
de modo de colaborar con el encuentro de las trayectorias al usar la fórmula
de recurrencia (3.4). Para definir F ,Sconstruiremos, para cada estado i ∈ S,
una partición del intervalo [0, 1) = j∈S I(i, j) en intervalos disjuntos tales
que λ I(i, j) = P (i, j).
Sean los intervalos J(j), j = 1, 2, · · · , N definidos por
J(1) = 0, `(1) , con `(1) = mı́n P (k, 1)
k∈S
J(j) = `(j − 1), `(j)
con `(j) = `(j − 1) + mı́n P (k, j) si j > 1
Tenemos que
k∈S
S
j∈S
J(j) es una partición de [0, `(N )), con
X
`(N ) =
mı́n P (k, j) = β(P)
j∈S
i∈S
S
˜ j),
Para cada i ∈ S, se va a tomar una partición de [`(N ), 1) = j∈S J(i,
˜ j)) = P (i, j). Basta
de forma que la suma de las longitudes λ(J(j)) + λ(J(i,
definir
˜ 1)
˜ 1) = `(N ) + P (i, 1) − mı́n P (k, 1)
˜ 1) = `(N ), `(i,
J(i,
`(i,
k∈S
˜ j − 1), `(i,
˜ j)
˜ j) = `(i,
J(i,
si j > 1, donde
˜ j) = `(i,
˜ j − 1) + P (i, j) − mı́n P (k, j)
`(i,
k∈S
34
˜ j) satisface las propiedades requeridas,
Es claro que I(i, j) = J(j) ∪ J(i,
esto es, para cada i∈ S, ∪j∈S I(i, j) es una partición en intervalos disjuntos
de [0, 1), y λ I(i, j) = P (i, j). Sea entonces la función
X
j 1II(i,j) (u).
F (i, u) =
j∈S
Observamos que si u ≤ `(N ), entonces para i0 , i1 dos estados cualesquiera de
S,
F (i0 , u) = F (i1 , u)
(a)
(8.1)
(b)
Si se generan recursivamente las cadenas Xn y Xn con condiciones iniciales
a y b respectivamente, usando la misma famila de uniformes i.i.d {Un }{n≥1} ,
y esta función, se tiene:
(a)
(b)
Xn+1 = F Xn(a) , Un+1 ,
Xn+1 = F Xn(b) , Un+1
De (8.1) sigue que si τ̃ = ı́nf{n ≥ 1 : Un < `(N )}, entonces τ (a,b) < τ̃ ,
∀ a, b ∈ S, de donde
P sup τ
(a,b)
n
\
> n ≤ P τ̃ > n ≤ P
a,b∈S
{Ur > `(N )}
r=1
= 1 − `(N ))
n
= 1 − β(P)
n
(8.2)
Veamos algunas importantes consecuencias de este resultado.
Teorema 8.3. Sea P la matriz de transición de una cadena de Markov Xn
recurrente positiva e irreducible, y tal que que β(P) > 0. Sea π su distribución
invariante. Entonces se satisface que
n
sup Pa (Xn = j) − π(j) ≤ 1 − β(P)
a,j
Demostración
Pa (Xn = j) − π(j) = Pa (Xn = j) − Pπ (Xn = j)k
X
=
Pa (Xn = j) − Pk (Xn = j) π(k) (8.3)
k∈S
35
(a)
(k)
Considerando las cadenas Xn y Xn acopladas como en la demostración del
teorema anterior y recordando que una vez que las trayectorias se encuentran
(en τ a,k ), entonces ellas continuan juntas, podemos estimar
|Pa (Xn = j)−Pk (Xn = j)| = |P (Xn(a) = j, Xn(k) 6= j)−P (Xn(k) = j, Xn(a) 6= j)|
≤ máx{P (Xn(a) = j, Xn(k) 6= j) , P (Xn(k) = j, Xn(a) 6= j)} ≤ supk6=a P (τ a,k > n)
Esta última probabilidad se estima como (8.2)
Corolario 8.4. Sea P la matriz de transición de una cadena de Markov
Xn recurrente positiva e irreducible con distribución invariante π, y tal que
β(Pk ) > 0. Entonces, para todo par de estados a, j ∈ S,
N
sup Pa (XN = j) − π(j) ≤ 1 − β(Pk ) k
a,j
Demostración Sea k como en el enunciado. La cadena de Markov {Xkn }n≥0 ,
cuya mariz de transición es Pk tiene la misma distribución invariante π, por
lo que vale el resultado anterior,
n
sup Pa (Xkn = j) − π(j) ≤ 1 − β(Pk )
a,j
Basta renombrar N = kn.
Ahora bien, para que los resultados anteriores garanticen la convergencia al equilibrio, independientemente de la condición inicial, hace falta que
β(P) > 0, o al menos que para algún k, β(Pk ) > 0. Veamos un ejemplo en
el cual esta hipótesis no se satisface, aún en las condiciones en que vale el
teorema ergódico 7.2.
Ejemplo 8.5. Considere el paseo aleatorio en el grafo formado por los 4
vértices de un cuadrado y sus lados, que corresponde con el siguiente grafo
de transición, donde todas las probabilidades son 12 , y hemos numerado los
vértices 1, 2, 3, 4.
36
1 y
9
4 3
s
2
3 Su matriz de transición es:
P=
0
1
2
0
1
2
0
0
0 12
1
0 12 0
2
1
2
0
1
2
1
2
Es fácil ver que esta cadena es irreducible y recurrente positiva, y que
su medida invariante es π = ( 14 , 14 , 14 , 41 ). Claramente, β(P) = 0. También
tenemos
1
0 12 0
2
0 1 0 1
2
2
P2 =
1 0 1 0
2
2
0 12 0 12
Más aún, en este caso particular es fácil obtener todas las potencias de
P: P2n+1 = P, y P2n = P2 , de modo que β(Pk ) = 0 ∀k ∈ N. En particular, por
ejemplo, la sucesión P (n) (1, 1) vale 12 si n es par, y 0 si n es impar, por lo que
claramente no converge cuando n → ∞. (Observe que, como ya sabı́amos del
teorema ergódico, converge a 14 en promedio , o en media Cesaro).
Este fenómeno se llama periodicidad. Precisamente, definimos:
Definición 8.6. Sea P es la matriz de transición de una cadena de Markov
en S, y j ∈ S. Consideremos d el máximo común divisor del conjunto
{n ≥ 1 : Pn (j, j) > 0}, es decir,
d = M CD {n ≥ 1 : Pn (j, j) > 0}
37
Si d > 1, el estado j se dice periódico de perı́odo d. Si d = 1, se dice
aperiódico.
Omitimos la demostración de las siguientes dos proposiciones, que puede
encontrarse por ejemplo en [3].
Proposición 8.7. Si dos estados i, j se comunican, entonces tienen el mismo
perı́odo.
Podemos hablar entonces del perı́odo de una cadena irreducible (o de una
clase comunicante).
Proposición 8.8. Si P es irreducible y tiene perı́odo d, entonces para cada
par de estados i, j, existen m > 0 y N0 tal que P(m+nd) (i, j) > 0 ∀n ≥ N0 .
Observación Si S es finito y la cadena es irreducible y aperiódica, entonces,
en virtud del resultado anterior, tenemos que existe k tal que
P (k) (i, j) > 0 ∀i, j ∈ S
En particular, vale el Teorema 8.3.
Definición 8.9. Una cadena de Markov se dice ergódica si es irreducible,
recurrente positiva y aperiódica.
No es difı́cil a esta altura, demostrar el siguiente resultado, que en el caso
de S finito, es una consecuencia de del teorema 8.3.
Teorema 8.10. Si Xn es una cadena ergódica en S, y π es su distribución
invariante, entonces
P (n) (i, j) → π(j)
cuando n → ∞
Con respecto a las cadenas irreducibles y periódicas de perı́odo d, podemos decir lo siguiente. Supongamos que su matriz de transición es P. De la
proposición 8.8, tenemos que existe una partición de S en clases G0 , G1 , · · · Gd−1
tales que (tomando la convención Gd = G0 ),
X
P (i, j) = 1 ∀i ∈ Gk
j∈Gk+1
(En palabras, la cadena se va moviendo entre estas clases). Si además es
recurrente positiva, es fácil ver que la cadena con matriz Pd restringida a
38
cada una de las clases G` es recurrente positiva, irreducible y aperiódica, por
lo que tiene una distribución invariante Π. Como la esperanza del tiempo de
k)
retorno a un estado k ∈ G` con respecto a la matriz Pd tiene que ser Ek (T
d
(donde esta última esperanza es en relación a la cadena original) es fácil ver
que, si k ∈ G`
(
d
si i ∈ G`
lı́m P (nd) (i, k) = Ej (Tk )
n→∞
0
si no
Ejercicios
1. Considere el paseo simétrico en el grafo formado por un pentágono y
sus lados. ¿ Es periódico? Encuentre n tal que P (n) (i, j) > 0 para todo
par de estados i, j.
2. Considere la cadena correspondiente a la matriz P dada en la sección
3, y diga si es periódica.
3. Sean P, β y τ a,b como en el teorema 8.2. Deduzca de este resultado una
cota para la esperanza E(τ a,b ).
9.
Algunos algoritmos de simulación
Uno de las aplicaciones actuales más difundidas de las cadenas de Markov
es en los conocidos como métodos de Monte Carlo por Cadenas de Markov
(MCMC por sus siglas en inglés). Son métodos para simular una muestra
de una distribución π definida en un espacio de estados finito S. Consisten
en simular una cadena de Markov ergódica (recuerde la definición 8.9) en S
cuya distribución invariante es precisamente la π dada, y dejarla evolucionar
“hasta alcanzar el equilibrio”. En vista de los resultados de la sección anterior,
se obtiene una realización (aproximada) de π. En este contexto la distribución
π se denomina blanco, o target, en inglés.
Veamos un par de formas de conseguir una cadena ergódica con distribución invariante π dada en un espacio finito S = 1, 2, · · · , N .
39
1-. Sean las siguientes probabilidades de transición :
1
π(j)
N − 1 (π(j) + π(i))
X
P (i, i) = 1 −
P (i, j)
P (i, j) =
si i 6= j
j6=i
2-. Sean las probabilidades de transición P̃ (i, j) dadas ası́
1 π(j)
P̃ (i, j) =
1I{π(i)≤π(j)} +
1I{π(i)>π(j)}
N −1
π(i)
X
P̃ (i, i) = 1 −
P̃ (i, j)
si i 6= j
j6=i
Es muy fácil verificar que las cadenas correspondientes a estas probabilidades
de transición tienen
las propiedades requeridas. En efecto, si i 6= j, entonces
P
P (i, j) > 0, y j6=i P (i, j) < 1, por lo que P (i, i) > 0 también. Pero entonces
la cadena es irreducible y aperiódica. Como S es finito, también es recurrente
positiva. Para mostrar que π es invariante para la cadena, basta verificar
que es reversible (como definido en el Ejercicio de la sección 6), lo cual es
inmediato de la definición.
9.1.
El algoritmo de Propp y Wilson
Este algoritmo fue propuesto por J. Propp y D. Wilson en 1996 en [10]
para obtener una muestra de una medida π en un espacio finito, y tiene la
ventaja de que (cuando converge) genera una muestra exacta de la distribución blanco. Tiene además un mecanismo de parada automático,por lo que no
requiere cálculos de velocidad de convergencia. Es un mecanismo de muestreo
“ desde el pasado”. Una discusión de esta propuesta incluyendo ejemplos y
generalizaciones, puede encontrarse en [8] y las referencias allı́ citadas.
Sea entonces el espacio S = {1, 2, 3, · · · , N }, donde está definida una
medida π de la cual se desea obtener una muestra. Sea Xn una cadena de
Markov reversible y ergódica tal que π sea su distribución invariante. (Por
ejemplo, una de las presentadas al comienzo de esta sección). Sea F una función que genera por recurrencia a Xn , a partir de una muestra de uniformes
{Un } i.i.d. (Por ejemplo, la considerada en (3.3)). El algoritmo consiste en
considerar un acoplamiento de N cadenas, cada una comenzando en un estado diferente de S, desde tiempos en el pasado, mirar el estado de cada una de
40
ellas en el tiempo 0, e ir suficientemente hacia atrás hasta que coincidan en el
tiempo 0. Por la forma en que se usan las variables uniformes, el valor X0 estará distribuido según π. Concretamente, sea una sucesión creciente de tiempos (N1 , N2 , N3 · · · ), por ejemplo Nk = 2k . Los negativos de estos números
serán los tiempos de partida en el pasado de las cadenas, −N1 , −N2 , N3 , · · · .
Supongamos (por conveniencia en la notación) que las variables uniformes
están indexadas en −N : {U−n }n≥0 El algoritmo funcion ası́
1. Tómese m = 1.
2. Para cada j ∈ S, simúlese una cadena de Markov comenzando en j en
el tiempo −Nm , usando una función F y las v.a. uniformes
U−Nm +1 , U−Nm +2 , · · · , U−1 , U0
3. Si todas las cadenas están en el mismo estado k en el tiempo 0, el
algoritmo se detiene, con salida k. En caso contrario, se pasa a 4.
4. Tómese m + 1 y comiéncese nuevamente en el paso 2.
Es importante (y desde el punto de vista práctico, complicado) que parte de
las v. a. uniformes son reutilizadas cuando se retrocede en el tiempo.
Tenemos el siguiente resultado:
Teorema 9.1. Supongamos que el algoritmo descrito arriba, en las condiciones consideradas para la cadena de Markov correspondiente, termina con
probabilidad 1, y sea Y su salida. Entonces Y se distribuye según π, es decir,
para j ∈ S,
P Y = j = π(j)
Demostración Basta demostrar que, dado ε > 0,
|P Y = j − π(j)| < ε
(9.1)
Ya que el algoritmo termina con probabilidad 1, existe M tal que
(j,−NM )
sup |P (X0
k,j∈S
(j,−N
)
(k,−N
(k,−NM )
6= X0
)
)| < ε
M
M
donde X0
y X0
es la posición en el tiempo 0 de las cadenas
(acopladas según indica el algoritmo) que en tiempo −NM comienzan en j
41
(π,−N
)
M
y k, respectivamente. Sea ahora Xn
una cadena que en tiempo −NM
(π,−NM )
esta distribuida según π. Como π es invariante, entonces X0
∼ π. Pero
entonces
(j,−NM )
(π,−NM )
6= X0
) < ε,
P (X0
y procediendo como en (8.3), sigue (9.1)
Ejercicios
1. Verifique que las probabilidades de transición P̃ (i, j) del ejemplo 2-.
dan lugar a una cadena ergódica con distribución invariante π.
2. Considere la distribución π = ( 16 , 26 , 36 ) en S = {1, 2, 3}.
Escriba una matriz de transición cuya cadena tiene distribución
invariante π.
Implemente el algoritmo de Propp y Wilson para generar una
muestra de π.
Apéndice
El siguiente es un conjunto de 4 muestras de tamaño 10 de variables
uniformes en el intervalo [0, 1]:
0,4186
0,5028
0,6979
0,6602
0,8462
0,7095
0,3784
0,3420
0,5252
0,4289
0,8600
0,2897
0,2026
0,3046
0,8537
0,3412
0,6721
0,1897
0,5936
0,5341
0,8381
0,1934
0,4966
0,7271
0,0196
0,6822
0,8998
0,3093
0,6813
0,3028
0,8216
0,8385
0,3795
0,5417
0,6449
0,5681
0,8318
0,1509
0,8180
0,3704
Fórmula de Stirling
√
1 n! = nn e−n 2πn 1 + Ø( )
n
Una demostración de esta fórmula se encuentra en [5], por ejemplo. Más
detalles en [1].
42
Referencias
[1] Stella Brassesco and Miguel A Méndez. The asymptotic expansion
of n! and the Lagrange inversion formula. The Ramanujan Journal,
24(2):219–234, 2011.
[2] Leo Breiman. Probability and stochastic processes with a view toward
applications. Houghton Mifflin Company, 1969.
[3] Pierre Brémaud. Markov chains, Gibbs fields, Monte Carlo simulations
and queues. Springer, 1998.
[4] P Eherenfest and T Ehrenfest. The Conceptual Foundations of the Statistical Approach in Mechanics. Dover Publications, 1990.
[5] William Feller. Introduction to Probability theory and its applications.
John Wiley and sons Inc., 1968.
[6] Pablo A Ferrari and Antonio Galves. Construction of stochastic processes, coupling and regeneration. XIII Escuela Venezolana de Matemática,
2000.
[7] Antonio Galves, Arnaldo C.R. Nogueira, and Maria Eulália Vares. Introducão aos sistemas Markovianos de particulas. 5o Simpósio Nacional
de Probabilidade e Estatistica, 1982.
[8] Olle Häggstrom. Finite Markov chains and algorithmic applictions.
Cambridge university press, 2002.
[9] Torgny Lindvall. Lectures on the coupling method. Dover publications
Inc., 2002.
[10] J. Propp and D. Wilson. Exact sampling with coupled Markov chains
and applications to statistical mechanics. Random Strutures and Algorithms, 9(1& 2):223–252, 1996.
[11] Henry C Tuckwell. Elementary applications of probability theory. Chapman and Hall, second edition, 1995.
43