Act 6: Lección Evaluativa Capítulo 3 Nombre de curso
Anuncio

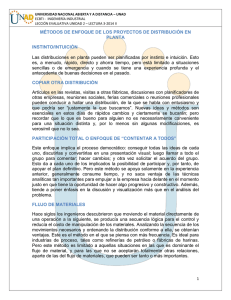
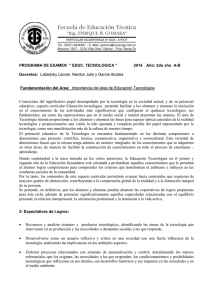
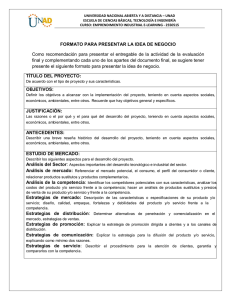
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD Tecnología en Gestión de Redes de Acceso de Telecomunicaciones - ECBTI 2150514 – Automatización Industrial E-Learning. Act 6: Lección Evaluativa Capítulo 3 Nombre de curso: AUTOMATIZACION INDUSTRIAL E-LEARNING 2150514 Temáticas revisadas: CAPITULO 3 Estrategia de aprendizaje: Aprendizaje Autónomo o Individual Aspectos generales: Este trabajo se compone de una lectura y unas preguntas sobre la lectura. Introducción Como hemos visto, la revolución industrial ocurrió al substituirse la producción manual o artesanal, de un sólo artículo a la vez, por la producción en masa o en serie. Esto fue posible gracias a que el “governor”, creado por James Watt en 1788, permitió el control automático y estable de la velocidad de la maquinaria de vapor. Posteriormente, el motor eléctrico, los sistemas hidráulicos, etc. reemplazaron a las máquinas de vapor y se desarrollaron los sistemas automáticos de control industrial. Sistemas de Control Los podemos clasificar en dos grupos, según el objeto del control 1. Control de movimiento Se conocen también como servomecanismos: Controlan posición, velocidad, aceleración, dirección y sentido. 2. Control de procesos Controlan variables físicas o químicas tales como: temperatura, presión, caudal, nivel de líquido en un tanque, pH (acidez), humedad, o composición química. Son de uso habitual en la industria. Los sistemas de control pueden ser a lazo abierto o a lazo cerrado. Control en lazo abierto: El control en lazo abierto se caracteriza porque la información o variables que controlan el proceso circulan en una sola dirección UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD Tecnología en Gestión de Redes de Acceso de Telecomunicaciones - ECBTI 2150514 – Automatización Industrial E-Learning. Control en lazo cerrado: El control en lazo cerrado se caracteriza porque existe una realimentación a través de los sensores desde el proceso hacia el sistema de control, que permite a éste último conocer si las acciones ordenadas a los actuadores se han realizado correctamente sobre el proceso. UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD Tecnología en Gestión de Redes de Acceso de Telecomunicaciones - ECBTI 2150514 – Automatización Industrial E-Learning. Por tanto, los sistemas de control en lazo cerrado son capaces de controlar en cada momento lo que ocurre a la salida del sistema, y modificarlo si es necesario. De esta manera, el sistema es capaz de funcionar por sí solo de forma automática y cíclica, sin necesidad de intervención humana. Estos sistemas, capaces de autocontrolarse sin que intervenga una persona, reciben el nombre de sistemas de control automáticos o automatismos. Un ejemplo de automatismo fácil de entender es el que controla la temperatura de una habitación mediante un termostato. El termostato es un dispositivo que compara la temperatura indicada en un selector de referencia con la existente en la habitación; en caso de que ambas no sean iguales, genera una señal que actúa sobre el sistema de calefacción, hasta hacer que la temperatura de la habitación coincida con la de referencia. En los sistemas de fabricación también se han incorporado las máquinas automáticas, que llevan a cabo trabajos de precisión y nos evitan realizar tareas pesadas. Esta nueva forma de trabajo se denomina automatización. Así, existen máquinas que ensamblan vehículos, fabrican tarjetas de circuito impreso, montan cajas de embalaje, franquean y clasifican el correo, transportan materiales de un sitio a otro de la fábrica, rellenan botellas con líquidos, preparan y cierran latas de alimentos en conserva, fabrican medicamentos y los embalan, e infinidad de ejemplos en todos los ámbitos de la industria. UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD Tecnología en Gestión de Redes de Acceso de Telecomunicaciones - ECBTI 2150514 – Automatización Industrial E-Learning. Elementos constituyentes de control en lazo cerrado Los sistemas en lazo cerrado presentan las siguientes ventajas frente a los de lazo abierto. UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD Tecnología en Gestión de Redes de Acceso de Telecomunicaciones - ECBTI 2150514 – Automatización Industrial E-Learning. Más exactos en la obtención de los valores requeridos para la variable controlada. Menos sensibles a las perturbaciones. Menos sensibles a cambios en las características de los componentes. Aunque tienen las siguientes desventajas: Son significativamente más inestables. Son más caros. Al ser más complejos son más propensos a tener averías, y presentan mayor dificultad en su mantenimiento. Algunas definiciones importantes: Variable del sistema: Toda magnitud física susceptible de ser sometida a vigilancia y control que define el comportamiento de un sistema (velocidad, temperatura, posición,…). Entrada: Excitación que se aplica a un sistema de control desde un elemento externo, al objeto de generar una respuesta. Salida: Respuesta proporcionada por el sistema de control al estímulo de la entrada. Perturbación: Señal no deseada que modifica adversamente de modo imprevisto el funcionamiento del sistema, pueden ser internas o externas al propio sistema. Planta: Sistema sobre el que deseamos realizar el control. Sistema: Conjunto de dispositivos que actúan interrelacionados para realizar el control. Los sistemas de control reciben la información facilitada por los sensores y, tras ser procesada, se utiliza para controlar los actuadores. Entrada de mando: Señal externa al sistema que condiciona su funcionamiento. Señal de referencia: Señal de entrada que utilizamos para calibrar al sistema. Señal de error: Señal obtenida en la salida del comparador entre la señal de referencia y la señal realimentada. UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD Tecnología en Gestión de Redes de Acceso de Telecomunicaciones - ECBTI 2150514 – Automatización Industrial E-Learning. Señal activa: cuando la señal de error resultante del comparador está muy atenuada, es necesario amplificarla para convertirla en una señal capaz de activar los distintos componentes del sistema. Unidad de control: Controla la salida en función de una señal activa. Unidad de realimentación: Conjunto de dispositivos que captan la variable controlada, la acondicionan y llevan al comparador. Transductor: Elemento que transforma una magnitud física en otra interpretable por el sistema. BIBLIOGRAFIA http://educativa.catedu.es/44700165/aula/archivos/repositorio//4750/4925/html/4_ti pos_de_sistemas_de_control.html