Procesos Estocásticos
Introducción
• Las características de un fenómeno aleatorio puede ser
descrito a través de la distribución de probabilidad de una
variable aleatoria que representa el fenómeno.
• En la teoría de probabilidad, las propiedades estadísticas de
un fenómeno aleatorio que ocurre de manera aleatoria
respecto al tiempo no son considerados.
2
Introducción
• Ejemplos de fenómenos aleatorios en el tiempo:
– Movimiento de una partícula en el movimiento
Browniano
– Emisión de fuentes radioactivas
– Flujo de corriente en un circuito eléctrico.
– Comportamiento de una onda en el oceano.
– Respuesta de un avión al viento y movimiento de un
barco en el mar.
– Vibración de un edificio causado por un temblor o
terremoto.
3
Proceso Estocástico
• Definición: Una familia de variables aleatorias x(t) donde t
es el parámetro perteneciente a un conjunto indexado T es
llamado un proceso estocástico (o proceso aleatorio), y se
denota por:
{x(t ), t T }
también es definido como:
{x(t , ), t T , }
donde es el espacio muestral.
4
Proceso Estocástico
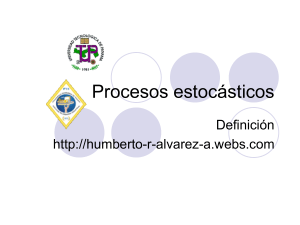
• Observación:
– Si t es fijo, x( ) es una familia de variables aleatorias.
(“ensemble”).
– Para fijo, x(t) es una función del tiempo llamada
“función muestrada”.
1
x(t )
2
x(t )
3
x(t )
k
x(t )
n
x(t )
t1
t2
5
Proceso Estocástico
Estado
Continuo
Discreto
Discreto
Tiempo
Continuo
• Estado y tiempo discreto y continuo.
6
Función de Medias
1. Sea {x(t ), t T } un proceso estocástico, se llama función
de medias:
x (t ) : T
t x (t ) E[ xt ]
Obs: x (t ) E[ x(t )] cte t T se dice que es un
proceso estocástico estable en media.
7
Función de Varianzas
2. Sea {x(t ), t T } un proceso estocástico, se llama función
de varianzas:
x2 (t ) : T
t x2 (t ) V [ xt ] E{( xt E[ xt ]2 }
Obs: x2 (t ) cte t T se dice que es un proceso
estocástico estable en varianza.
8
Función de Autocovarianzas
3. Sea {x(t ), t T } un proceso estocástico, se llama función
de varianzas:
C xx (t ) : T T
(t1 , t 2 ) C xx (t1,t 2 ) Cov[ xt , xt2 ]
1
E{( xt1 x (t1 ))( xt2 x (t 2 ))}
9
Función de Autocovarianza
• La función de Autocovarianza Cxx (t1 , t2 ) de un proceso
estocástico viene dado por:
C xx (t1 , t 2 ) Cov[ x(t1 ), x(t 2 )]
E[( x(t1 ) E[ x(t1 )])( x(t 2 ) E[ x(t 2 )])]
1 n k
{ x(t1 ) x(t1 )}{ k x(t 2 ) x(t 2 )}
n k 1
donde
1 n k
x(ti ) E[ x(ti )] x(ti )
n k 1
i 1,2
• Si está en función de las diferencias de tiempo:
R( ) Cov[ x(t ), x(t )]
10
Función de Autocorrelación
3. Sea {x(t ), t T } un proceso estocástico, se llama función
de varianzas:
x (t ) : T T
(t1 , t 2 ) x (t1,t 2 )
Cov[ xt , xt2 ]
1
(t1 ) (t 2 )
11
Distribución conjunta finito
dimensional
• Sea (, , P) un espacio de probabilidad y un conjunto de
índices T, y X : T un proceso estocástico.
El sistema:
FX {FX (t1 ),..., X (tn ) : t1,....,tn T , n }
es una “Distribución conjunta finito dimensional”
12
Proceso estocástico de 2° orden
• Sea X un proceso estocástico, se dice de 2° orden ssi
E[ x 2 (t )] t T
o sea
2 (t ) 2 12 t T
13
1.- Proceso Estacionario
OBS: Las características de un proceso aleatorio son
evaluados basados en el ensemble.
a) Proceso Estocástico Estacionario Estricto:
– Si la distribución conjunta de un vector aleatorio n1
2
n
dimensional, { x(t ), x(t ),...., x(t )}
y {1 x(t ),2 x(t ),....,n x(t )}
es la misma para todo , entonces el proceso
estocástico x(t) se dice que es un proceso estocástico
estacionario (o estado estacionario).
– Es decir, las propiedades estadísticas del proceso se
mantienen invariante bajo la traslación en el tiempo.
14
1.- Proceso Estacionario
b) Proceso Estocástico Evolucionario:
– Es aquel proceso estocástico que no es estacionario.
c) Proceso Estocástico Débilmente Estacionario:
– Un proceso estocástico se dice débilmente estacionario
(o estacionario en covarianza) si su función de valor
medio E[x(t)] es constante independiente de t y su
función de autocovarianza Cov[x(t),x(t+)] depende de
para todo t.
15
2.- Proceso Ergódico
• Un proceso estocástico x(t) se dice que es un proceso
ergódico si el tiempo promedio de un simple registro es
aproximadamente igual al promedio de ensemble. Esto es:
1 n
n x(ti ) para un proceso de tiempo discreto.
i 1
E[ x(t )] T
1 x(t )dt para un proceso de tiempo continuo.
T
0
16
2.- Proceso Ergódico
• Obs:
– En general, las propiedades ergódicas de un proceso
estocástico se asume verdadera en el análisis de los
datos observados en ingeniería, y por lo tanto las
propiedades estadísticas de un proceso aleatorio puede
ser evaluado a partir del análisis de un único registro.
17
3.- Proceso de Incrementos
Independientes
• Un proceso estocástico x(t) se dice que es un proceso de
incrementos independientes si x(ti 1 ) x(ti ) , i=0,1,…, es
es estadísticamente independiente (Por lo tanto,
estadísticamente no correlacionado).
• Sea el proceso estocástico x(t) un proceso estacionario de
incrementos independientes. Entonces, la varianza de los
incrementos independientes x(t 2 ) x(t1 ) , donde t1 t 2
,es proporcional a t 2 t1
18
4.- Proceso de Markov
• Un proceso estocástico x(t) se dice que es un proceso de
Markov si satisface la siguiente probabilidad condicional:
P{x(t n ) xn | x(t1 ) x1 , x(t 2 ) x2 ,..., x(t n 1 ) xn 1}
P{x(t n ) xn | x(t n 1 ) xn 1},
donde t1 t 2 ....t n 1 t n
• Cadena de Markov: Proceso de Markov con estado
discreto.
• Proceso de Difusión: Proceso de Markov con estado
continuo.
19
4.- Proceso de Markov
• La ecuación anterior puede ser escrita como:
f {x(t n ) | x(t1 ), x(t 2 ),..., x(t n1 )} f {x(t n ) | x(t n1 )}
entonces se tiene:
f {x(t1 ), x(t 2 ),..., x(t n )}
f {x(t n ) | x(t1 ), x(t 2 ),..., x(t n 1 )} f {x(t1 ), x(t 2 ),..., x(t n 1 )}
f {x(t n ) | x(t n 1 )} f {x(t1 ), x(t 2 ),..., x(t n 1 )}
f {x(t1 ), x(t 2 ),..., x(t n 1 )}
f {x(t n 1 ) | x(t n 2 )} f {x(t1 ), x(t 2 ),..., x(t n 2 )}
n
f {x(t1 ), x(t 2 ),..., x(t n )} f {x(ti )} f {x(t n ) | x(t r 1 )}
r 2
20
4.- Proceso de Markov
• Conclusión:
– La función de densidad de probabilidad conjunta de un
proceso de Markov puede ser expresado por medio de
las densidades marginales f {x(t1 )} y un conjunto de
funciones de densidad de probabilidad condicional
f {x(t r ) | x(t r 1 )} ,el cual es llamado densidad de
probabilidad de transición.
• Un proceso de Markov se dice Homogeneo en el tiempo si
la densidad de probabilidad de transición es invariante en
el tiempo :
f {x(t r ) | x(t r 1 )} f {x(t r ) | x(t r 1 )}
21
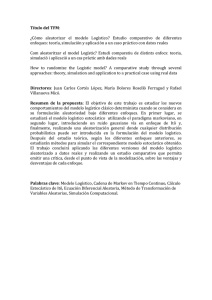
5.- Proceso de Conteo
• Un proceso estocástico de tiempo continuo y valores
enteros se llama proceso de conteo de la serie de eventos si
N(t) representa el número total de ocurrencias de un evento
en el intervalo de tiempo t=0 a t.
N(t)
4
3
2
1
0
t1
t2
T1 T2
t3
T3
T4
Time
Intervalos de tiempo
entre sucesivas
ocurrencias
22
5.- Proceso de Conteo
• Proceso de renovación (Renewal Process):
– Los tiempos entre llegadas son v.a. i.i.d.
• Proceso de Poisson:
– Proceso de renovación en la cual los tiempos entre
llegadas obedecen una distribución exponencial.
23
6.- Proceso de Banda-Angosta
• Un proceso estocástico de tiempo continuo y estado
estacionario x(t) es llamado un proceso de banda angosta si
x(t) puede ser expresado como:
x(t ) A(t ) cos{ 0 (t )}
donde 0 = constante . La amplitud A(t), y la fase (t) son
variables aleatorias cuyo espacio de muestreo son
0A(t) y 0 (t) 2, respectivamente.
2
2 2
2
2
0
0 0
0
0
24
7.- Proceso Normal(Gaussiano)
• Un proceso estocástico x(t) se dice que es un proceso
normal (o gaussiano) si para cualquier tiempo t, la variable
aleatoria x(t) tiene distribución Normal.
• Obs:
– Un proceso normal es importante en el análisis
estocástico de un fenómeno aleatorio observado en las
ciencias naturales, ya que muchos fenomenos aleatorios
pueden ser representados aproximadamente por una
densidad de probabilidad normal. Ejm: movimiento de
la superficie del oceano.
25
8.- Proceso de Wiener-Lévy
• Un proceso estocástico x(t) se dice que es un proceso de
Wiener-Lévy si:
i) x(t) tiene incrementos independientes estacionarios.
ii) Todo incremento independiente tiene distribución
normal.
iii) E[x(t)]=0 para todo el tiempo.
iv) x(0)=0
• Se conoce como Proceso de movimiento Browniano el
cual describe el movimiento de pequeñas particulas
inmersas en un líquido o gas.
26
8.- Proceso de Wiener-Lévy
• Se puede demostrar que la varianza de un proceso WienerLévy aumenta linealmente con el tiempo.
27
9.- Proceso de Poisson
• Un proceso de conteo N(t) se dice que es un proceso de
Poisson con razón media (o intensidad) si:
i) N(t) tiene incrementos independientes estacionarios.
ii) N(0)=0
iii) El número de la longitud en cualquier intervalo de
tiempo está distribuido como Poisson con media . Esto
es:
k
()
P{N (t ) N (t ) k} e
, k 0,1,2,...
k!
también es llamado como proceso de incremento de
Poisson.
28
9.- Proceso de Poisson
• Para un proceso estocástico de incrementos
independientes, se tiene la siguiente función de
autocovarianza:
Var[ N (t1 ) N (t 2 )] para 0 t 2 t1
Cov[ x(t1 ), x(t 2 )]
e.t.o.c
0
• Si x(t) tiene distribución de Poisson, entonces:
(t1 t 2 ) ( (t 2 t1 )) para 0 t 2 t1
Cov[ x(t1 ), x(t 2 )]
e.t.o.c
0
Por lo tanto un proceso de incremento de Poisson es
estacionario en covarianza.
29
10.- Proceso de Bernoulli
• Considerar una serie de intentos independientes con dos
salidas posibles: éxito o fracaso. Un proceso de conteo Xn
se llama proceso de Bernoulli si Xn representa el número
de éxitos en n intentos.
Si p es la probabilidad de éxito, la probabilidad de k éxitos
dado n intentos está dado por la distribución binomial:
n k nk
P{ X n k} p q , donde q 1 p
k
30
11.- Proceso Ruido Blanco
•
Sea {a(t )}tT
i. E[a(t )] 0
ii.
un p.e., se llama ruido blanco ssi:
1 si s t
Cov[at , as ] st
0 e.t.o.c.
•
Obs:
1. El ruido blanco es un proceso estocástico estacionario
(por construcción).
2
a
(
t
)
~
N
(
0
,
t T , en tal caso el ruido
2. Si
a)
blanco se dice Gaussiano.
3. Si t1 , t2 ,..., tn T son independientes
entonces es ruido blanco puro
31
12.- Proceso de Medias Móviles
• Sea {x(t ), t T } un p.e., se dice de media móvil de orden
q ssi:
xt at 1at 1 2 at 2 ..... q at q
donde
1 ,...., q , q 0
y {a(t )}tT es ruido blanco.
• Notación:
X ~ MA(q)
32
13.- Proceso Autoregresivo
• Sea {x(t ), t T } un p.e., se dice autoregresivo de orden p
ssi:
xt 1 xt 1 2 xt 2 ... p xt p at
donde
1 ,...., p , p 0
y {a(t )}tT es ruido blanco.
• Notación:
X ~ AR( p)
33
14.- Proceso ARMA
• Sea {x(t ), t T } un p.e., se dice autoregresivo de media
móvil de orden (p,q) ssi:
xt 1 xt 1 ... p xt p at 1at 1 ... q at q
donde
1 ,...., p ,1 ,..., q , p 0, q 0
y {a(t )}tT es ruido blanco.
• Notación:
X ~ ARMA ( p, q)
34