MÉTODO DE FACTORIZACIÓN LOWER UPER PARA LA
RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES.
MÉTODO DE LAGRANGE PARA LA INTERPOLACIÓN DE
DATOS:
Pablo Enriques Diaz1, Paulo Ibañez Almaguer2
Instituto Superior de Tecnología y Ciencias Aplicada
InsTEC
pablitoed@instec.cu1, paulo.ibañez@instec.cu2
RESUMEN
En el presente trabajo se abordaran dos métodos de gran importancia,
primeramente el método de factorización LU de Doolittle y método de
Lagrange para la interpolación de datos. El objetivo que se pretende cumplir
es dar solución a determinados problemas con la utilización de estos
métodos ya que día a día nos encontramos con problemas difíciles de
resolver en los cuales los métodos numéricos son de vital ayuda. Para ello se
resuelven dos problemas propuestos en los que se emplearan los métodos
anteriormente mencionados, primero se hará una descripción breve y precisa
de ambos, se analizara la convergencia de cada uno y se realizaran los
algoritmos en forma de seudocódigo correspondiente a cada método.
Palabras claves: Factorización LU, Método de Lagrange para la interpolación
1. INTRODUCCIÓN
1.1 MÉTODO DE FACTORIZACIÓN LU PARA LA RESOLUCIÓN DE SISTEMAS
DE ECUACIONES LINEALES
En el álgebra lineal, la factorización o descomposición LU (del inglés Lower-Upper)
es una forma de factorización de una matriz como el producto de una matriz
triangular inferior y una superior. Debido a la inestabilidad de este método, deben
tenerse en cuenta algunos casos especiales, por ejemplo, si uno o varios elementos
de la diagonal principal de la matriz a factorizar es cero, es necesario pre multiplicar
la matriz por una o varias matrices elementales de permutación. Método llamado
factorización con pivote. Esta descomposición se usa en el análisis numérico para
resolver sistemas de ecuaciones (más eficientemente) o encontrar las matrices
inversas.
[A] {X} – {B} = 0
Supongamos que la ecuación anterior puede expresarse como un sistema
triangular superior:
.
Lo anterior expuesto se puede expresar en notación matricial y se reordena
Ahora, suponga que existe una matriz diagonal inferior con números 1 en la
diagonal,
Que tiene la propiedad de que cuando se pre multiplica por la ecuación anterior, el
resultado es la siguiente expresión:
Si estas ecuaciones se satisfacen, según las reglas de multiplicación entre
matrices, se obtendrá
1.1.2 UNICIDAD
Las matrices L y U son únicas, si la matriz no es singular. En caso contrario pueden
no ser únicas. Demostración:
Dada la matriz A con un dominio
Recordando que L1, L2, U1, U2 son invertibles por tener el determinante distinto de
cero, por lo tanto:
Lo que conlleva
Que es una matriz triangular inferior, con unos en la diagonal y es triangular
superior (recordando que el producto matricial de triangulares superiores/inferiores
es triangular superior/inferior). La única matriz que cumple estas dos propiedades
es la identidad. Por lo tanto:
Con lo cual:
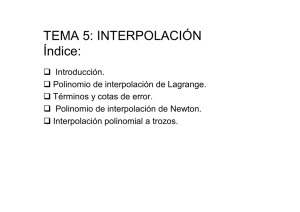
1.1.3 ALGORITMO EN FORMA DE SEUDOCÓDIGO:
Figura 1 Diagrama de la descomposición LU
1.2 MÉTODO DE LAGRANGE PARA LA INTERPOLACIÓN DE DATOS
EL método de Lagrange brinda un algoritmo eficiente para hallar el polinomio
interpolador pero, además permite encontrar el valor interpolando por una (x)
especifica sin la necesidad de hallar la expresión analítica del polinomio
interpolador
Sean
x0,x1,x2,,x3………….. xn nodos de interpolación diferentes y f(x) la función
a interpolar .Sean
Los valores de f en los nodos .El método de Lagrange consiste en encontrar n+1
polinomios básicos de grado n:
Dichos polinomios deben satisfacer las siguientes condiciones
Una vez obtenido el polinomio:
Cumple las condiciones:
Además, como p(x) es una combinación lineal de polinomios de grado n su grado
será menor o igual que n y es, por tanto, el polinomio de interpolación buscando.
Para hallar el polinomio básico:
Donde dicho polinomio posee el mismo n ceros
Lo que nos conlleva a que cada nodo de interpolación excepto xi es un cero de
Li(x), por tanto:
Donde K es un coeficiente aún por determinar. Como se debe cumplir que Li(x) =1 ,
el valor de K se hallara de modo que esta condición se satisfaga.
Despejando K:
Y sustituyendo esta expresión para K en la ecuación que se planteaba inicialmente
1.2.2 DESVENAJAS DE SU USO
Si se aumenta el número de puntos a interpolar (o nodos) con la intención de
mejorar la aproximación a una función, también lo hace el grado del polinomio
interpolador así obtenido, por norma general. De este modo, aumenta la dificultad
en el cálculo, haciéndolo poco operativo manualmente a partir del grado 4, dado
que no existen métodos directos de resolución de ecuaciones de grado 4, salvo que
se puedan tratar como ecuaciones bicuadradas, situación extremadamente rara.
La tecnología actual permite manejar polinomios de grados superiores sin grandes
problemas, a costa de un elevado consumo de tiempo de computación. Pero, a
medida que crece el grado, mayores son las oscilaciones entre puntos consecutivos
o nodos. Se podría decir que a partir del grado 6 las oscilaciones son tal que el
método deja de ser válido, aunque no para todos los casos.
Sin embargo, pocos estudios requieren la interpolación de tan sólo 6 puntos. Se
suelen contar por decenas e incluso centenas. En estos casos, el grado de este
polinomio sería tan alto que resultaría inoperable. Por lo tanto, en estos casos, se
recurre a otra técnica de interpolación, como por ejemplo a la Interpolación
polinómica de Hermite o a los splines cúbicos
Otra gran desventaja, respecto a otros métodos de interpolación, es la necesidad de
recalcular todo el polinomio si se varía el número de nodos.
1.2.3 ALGORITMO EN FORMA DE SEUDOCÓDIGO
El algoritmo siguiente permite calcular p(x) donde p es el polinomio
interpolador y x es un valor numérico. El algoritmo funciona también si x es
una variable pero en este caso será necesario realizar operaciones
simbólicas de suma y multiplicación. Se supone conocido los nodos de
interpolación x0,x1,x2,,x3… xn y los valores correspondientes de la función a
interpolar : y0,y1,y2,y3 …yn . El resultado será una número de p(x) si x es
un número o el polinomio p(x) si x es simbólica
2. EJERCICIOS PROPUESTOS
I.
Utilizar el método de factorización LU para obtener la inversa de la siguiente
matriz:
II.
Sea la función
( )=
+ 2/
a) Utilizar el polinomio cuadrático de Lagrange basado en los nodos
1
=2y
2
= 2.5 para aproximar los valores
(1.5) y
(1.2)
b) Utilizar el polinomio cúbico de Lagrange basado en los nodos
= 1,
2
=2y
3
= 2.5 para aproximar los valores
(1.5) y
0
(1.2)
0
= 1,
= 0.5,
1
3. RESULTADOS Y DISCUSIÓN
3.1 En el primer ejercicio lo que se desea obtener es la matriz inversa a partir de la
matriz dada:
Para la primera resolución:
Lo que nos permite obtener
X1= [0.472
- 0.19 78
X2= [-0.0102
0.1245
0.3076
]
Para la segunda resolución:
Lo que nos permite obtener
-0.0769]
Para la tercera resolución:
Lo que nos permite obtener
X3= [ -0.5546
0.1454
0
]
De esta forma las soluciones de los respectivos sistemas x1 , x2 y x3 conforman la
matriz inversa
−1
0.472
= −0.1978
0.3076
−0.0102
0.1245
−0.0769
−0.5546
0.1454
0
3.2 En el segundo ejercicio utilizaremos el método de la interpolación de Lagrange
( )=
+ 2/
3.2.1 Utilizar el polinomio cuadrático de Labrange para los puntos
y0 = 3, y1 = 3 y y2 = 3.3
0 = 1, 1 = 2 y 2 = 2.5
L0 = (2*( x - 2 )*( x – 5/2 )) / 3
L1 = -2*( x – 1 )* ( x - 5/2 )
L2 = (4*( x – 1 )*( x – 2 )/3)
Polinomio Interpolado
(22*( x – 1 )*( x – 2 ) ) /15 - 6*( x -1 ) * ( x – 5/2) + 2 *( x – 2 ) *(x – 5/2)
El punto aproximar 1.5
El punto aproximar 1.2
La aproximación es 2.900000
La aproximación es 2.936000
X0 =0.5 X1=1 X2=2 X3=2.5
Y0=4.5 Y1=2 Y2=3 Y=3.3
L0 = (-2*( x – 1 ) * ( x – 2 ) * ( x – 5/2 ) ) / 3
L1 = (4* ( x – 2)*( x - ½ ) * ( x – 5/2 ) ) / 3
L2 = (-4* ( x – 2)*( x - ½ ) * ( x – 5/2 ) ) / 3
L3= (-2*( x – 1 ) * ( x – 2 ) * ( x – ½ ) ) / 3
Polinomio Interpolado
( 11 * ( x – 1 ) * ( x – 2 ) * (x – ½ ) ) /5 – ( 3 * ( x – 1 ) * (x – 2) * (x -5/2 ) )
– 4* ( x -1 )* (x - ½ )*(x - 5/2 ) + ( 4 * ( x - 2 ) * ( x - ½ ) * (x – 5/2 ) )
El punto aproximar 1.5
El punto aproximar 1.2
La aproximación es 2.700000
La aproximación es 2.769600
4. CONCLUSIONES
Con la finalización de este trabajo se ha hecho un análisis acerca de cómo los
diferentes métodos numérico con ayuda de la computación resultan sumamente
eficaces para realizar tareas que de otra forma se volverían tediosas y engorrosas.
El método de factorización lower uper resulto idóneo para la determinar la inversa
de una matriz determinada ,contando a la vez con una gran eficacia y rapidez lo
hacen bastante útil en los distintos trabajos científicos-técnicos. La interpolación de
datos por el método de Lagrange aunque resulta acertada este colectivo de autores
no recomienda su uso y propone la utilización de otros métodos como el spline
cubico.