PROGRAMACIÓN DE
ACTIVIDADES Y CONTROL
DE PROYECTOS CPM Y PERT
Introducción
Los proyectos en gran escala por una sola vez han existido desde
tiempos antiguos; este hecho lo atestigua la construcción de las
pirámides de Egipto y los acueductos de Roma. Pero sólo desde hace
poco se han analizado por parte de los investigadores operacionales
los problemas gerenciales asociados con dichos proyectos.
El problema de la administración de proyectos surgió con el proyecto
de armamentos del Polaris, empezando 1958. Con tantas componentes
y sub-componentes juntos producidos por diversos fabricantes, se
necesitaba una nueva herramienta para programar y controlar el
proyecto. El PERT (evaluación de programa y técnica de revisión) fue
desarrollado por científicos de la oficina Naval de Proyectos
Especiales. Booz, Allen y Hamilton y la División de Sistemas de
Armamentos de la Corporación Lockheed Aircraft.
Introducción
La técnica demostró tanta utilidad que ha ganado amplia aceptación tanto
en el gobierno como en el sector privado.
Casi al mismo tiempo, la Compañía DuPont, junto con la División
UNIVAC de la Remington Rand, desarrolló el método de la ruta crítica
(CPM) para controlar el mantenimiento de proyectos de plantas químicas
de DuPont. El CPM es idéntico al PERT en concepto y metodología. La
diferencia principal entre ellos es simplemente el método por medio del
cual se realizan estimados de tiempo para las actividades del proyecto.
Con CPM, los tiempos de las actividades son determinísticos. Con PERT,
los tiempos de las actividades son probabilísticos o estocásticos.
El PERT/CPM fue diseñado para proporcionar diversos elementos útiles
de información para los administradores del proyecto. Primero, el
PERT/CPM expone la "ruta crítica" de un proyecto.
Introducción
Estas son las actividades que limitan la duración del proyecto.
En otras palabras, para lograr que el proyecto se realice
pronto, las actividades de la ruta crítica deben realizarse
pronto. Por otra parte, si una actividad de la ruta crítica se
retarda, el proyecto como un todo se retarda en la misma
cantidad. Las actividades que no están en la ruta crítica
tienen una cierta cantidad de holgura; esto es, pueden
empezarse más tarde, y permitir que el proyecto como un
todo se mantenga en programa. El PERT/CPM identifica
estas actividades y la cantidad de tiempo disponible para
retardos.
Introducción
El PERT/CPM también considera los recursos
necesarios para completar las actividades. En
muchos proyectos, las limitaciones en mano de obra
y equipos hacen que la programación sea difícil. El
PERT/CPM identifica los instantes del proyecto en
que estas restricciones causarán problemas y de
acuerdo a la flexibilidad permitida por los tiempos
de holgura de las actividades no críticas, permite que
el gerente manipule ciertas actividades para aliviar
estos problemas.
Introducción
Finalmente, el PERT/CPM proporciona una
herramienta para controlar y monitorear el progreso
del proyecto. Cada actividad tiene su propio papel en
éste y su importancia en la terminación del proyecto
se manifiesta inmediatamente para el director del
mismo. Las actividades de la ruta crítica, permiten
por consiguiente, recibir la mayor parte de la
atención, debido a que la terminación del proyecto,
depende fuertemente de ellas. Las actividades no
críticas se manipularan y remplazaran en respuesta a
la disponibilidad de recursos.
Antecedentes
Dos son los orígenes del método del camino crítico: el
método PERT (Program Evaluation and Review
Technique) desarrollo por la Armada de los Estados
Unidos de América, en 1957, para controlar los tiempos
de ejecución de las diversas actividades integrantes de
los proyectos espaciales, por la necesidad de terminar
cada una de ellas dentro de los intervalos de tiempo
disponibles. Fue utilizado originalmente por el control
de tiempos del proyecto Polaris y actualmente se utiliza
en todo el programa espacial.
Antecedentes
El método CPM (Crítical Path Method), el segundo origen del
método actual, fue desarrollado también en 1957 en los
Estados Unidos de América, por un centro de investigación de
operaciones para la firma Dupont y Remington Rand,
buscando el control y la optimización de los costos de
operación mediante la planeación adecuada de las actividades
componentes del proyecto.
Ambos métodos aportaron los elementos administrativos
necesarios para formar el método del camino crítico actual,
utilizando el control de los tiempos de ejecución y los costos
de operación, para buscar que el proyecto total sea ejecutado
en el menor tiempo y al menor costo posible.
Antecedentes
Definición: El método del camino crítico es un proceso
administrativo de planeación, programación, ejecución y
control de todas y cada una de las actividades
componentes de un proyecto que debe desarrollarse
dentro de un tiempo crítico y al costo óptimo.
Usos: El campo de acción de este método es muy amplio,
dada su gran flexibilidad y adaptabilidad a cualquier
proyecto grande o pequeño. Para obtener los mejores
resultados debe aplicarse a los proyectos que posean las
siguientes características:
Antecedentes
a) Que el proyecto sea único, no repetitivo, en algunas
partes o en su totalidad.
b) Que se deba ejecutar todo el proyecto o parte de el,
en un tiempo mínimo, sin variaciones, es decir, en
tiempo crítico.
c) Que se desee el costo de operación más bajo posible
dentro de un tiempo disponible.
Antecedentes
Dentro del ámbito aplicación, el método se ha estado
usando para la planeación y control de diversas
actividades, tales como construcción de presas, apertura
de caminos, pavimentación, construcción de casas y
edificios, reparación de barcos, investigación de
mercados, movimientos de colonización, estudios
económicos regionales, auditorias, planeación de
carreras universitarias, distribución de tiempos de salas
de operaciones, ampliaciones de fábrica, planeación de
itinerarios para cobranzas, planes de venta, censos de
población, etc.
Diferencias entre PERT y CPM
Como se indicó antes, la principal diferencia entre
PERT y CPM es la manera en que se realizan los
estimados de tiempo. El PERT supone que el
tiempo para realizar cada una de las actividades es
una variable aleatoria descrita por una distribución
de probabilidad. El CPM por otra parte, infiere que
los tiempos de las actividades se conocen en forma
determinísticas y se pueden variar cambiando el
nivel de recursos utilizados.
Diferencias entre PERT y CPM
La distribución de tiempo que supone el PERT para
una actividad es una distribución beta. La distribución
para cualquier actividad se define por tres estimados:
El estimado de tiempo más probable, m;
2. El estimado de tiempo más optimista, a;
3. El estimado de tiempo más pesimista, b.
1.
Diferencias entre PERT y CPM
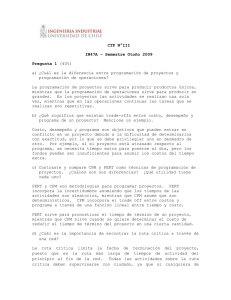
La forma de la distribución se muestra en la
siguiente Figura. E1 tiempo más probable es el
tiempo requerido para completar la actividad
bajo condiciones normales. Los tiempos
optimistas y pesimistas proporcionan una
medida de la incertidumbre inherente en la
actividad, incluyendo desperfectos en el equipo,
disponibilidad de mano de obra, retardo en los
materiales y otros factores.
Diferencias entre PERT y CPM
Diferencias entre PERT y CPM
Con la distribución definida, la media (esperada) y
la desviación estándar, respectivamente, del
tiempo de la actividad para la actividad z puede
calcularse por medio de las fórmulas de
aproximación.
a 4m b
Te ( Z )
6
ba
(Z )
6
Diferencias entre PERT y CPM
El tiempo esperado de finalización de un proyecto es la suma de
todos los tiempos esperados de las actividades sobre la ruta
crítica. De modo similar, suponiendo que las distribuciones de
los tiempos de las actividades son independientes
(realísticamente, una suposición fuertemente cuestionable), la
varianza del proyecto es la suma de las varianzas de las
actividades en la ruta crítica. Estas propiedades se demostrarán
posteriormente. En CPM solamente se requiere un estimado de
tiempo. Todos los cálculos se hacen con la suposición de que los
tiempos de actividad se conocen. A medida que el proyecto
avanza, estos estimados se utilizan para controlar y monitorear el
progreso. Si ocurre algún retardo en el proyecto, se hacen
esfuerzos por lograr que el proyecto quede de nuevo en programa
cambiando la asignación de recursos.
Métodos CPM y PERT
Los métodos CPM (método de la ruta crítica o del camino
crítico, critical path method) y PERT (técnica de evaluación y
revisión de programa, program evaluation and review
technique) se basan en diagramas, y tienen por objeto auxiliar
en la planeación, programación y control de proyectos. Se
define un proyecto como conjunto de actividades
interrelacionadas, en la que cada actividad consume tiempo y
recursos. El objetivo del CPM y del PERT es contar con un
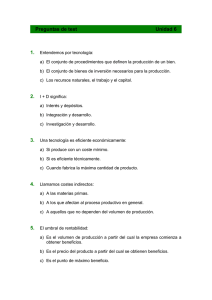
método analítico para programar las actividades. En la figura
siguiente se resumen los pasos de estas técnicas. Primero se
definen las actividades del proyecto, sus relaciones de
precedencia y sus necesidades de tiempo.
Métodos CPM y PERT
Fases de aplicación de un proyecto con CPM o
PERT
Métodos CPM y PERT
A continuación, el proyecto se traduce en un
diagrama que muestre las relaciones de precedencia
entre las actividades. El tercer paso implica cálculos
específicos de diagramas, que forman la base del
desarrollo del programa del proyecto en función del
tiempo.
Métodos CPM y PERT
Durante la ejecución del proyecto, podría no
cumplirse el programa que estaba planeado,
causando que algunas de las actividades se
adelanten o se atrasen. En este caso será
necesario actualizar el programa para que
refleje la realidad. Esta es la razón de incluir un
bucle, lazo o ciclo de retroalimentación entre la
fase de programa y la fase de diagrama, como
se ve en la figura anterior.
Métodos CPM y PERT
Las dos técnicas CPM y PERT, que se desarrollan en
forma independiente, difieren en que el CPM se
supone duraciones determinísticas de actividad,
mientras que el PERT se suponen duraciones
probabilísticas. Esta presentación comenzara con el
CPM y después se presentaran los detalles del PERT.
Modelaje de sistemas CPM/PERT
Para aplicar el CPM/PERT a un proyecto, se requiere
comprender completamente la estructura y
requisitos del mismo. El esfuerzo que se gaste para
identificar la estructura del proyecto es de gran valor
para la compresión de este. En particular, se deben
contestar cuatro preguntas para empezar el
procedimiento de modelaje:
Modelaje de sistemas CPM/PERT
1.
2.
3.
4.
¿Cuáles son las actividades que el proyecto requiere?
¿Cuáles son los requisitos de secuenciación o restricciones
de estas actividades?
¿Qué actividades pueden realizarse simultáneamente?
¿Cuáles son los tiempos estimados para cada actividad?
Modelaje de sistemas CPM/PERT
El primer paso para construir la diagrama
CPM/PERT consiste en hacer una lista de cada
una de las actividades y de las actividades que
inmediatamente las debe preceder.
Para la pregunta 4, la duración de los tiempos
estimados (días, semanas, horas, etc.) de cada
actividad se establece de acuerdo al rendimiento
de la mano de obra y del número de obreros
asignados a cada actividad.
Diagrama de actividades tipo red
Cada actividad del proyecto se representa con
un arco que apunta en la dirección de avance
del proyecto. Los nodos del diagrama
establecen las relaciones de precedencia entre
las diferentes actividades del proyecto.
Regla 1: Cada actividad se representa con un
arco, y uno sólo.
Regla 2: Cada actividad se debe identificar con
dos nodos diferentes.
Diagrama de actividades tipo red
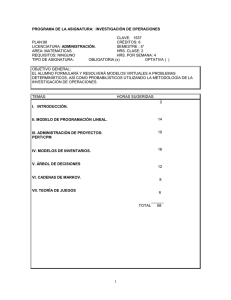
La figura siguiente muestra como se puede usar una
actividad ficticia para representar dos actividades
concurrentes, A y B. Por definición, la actividad
ficticia, que normalmente se representa con un arco
de línea interrumpida, no consume tiempo o
recursos. La inserción de una actividad ficticia en
una de las cuatro formas que se ven en la figura
8.2, mantiene la concurrencia de A y B, y también
proporciona nodos finales únicos para las dos
actividades (para satisfacer la regla 2)
Diagrama de actividades tipo red
Red
A
A
B
1
1
2
2
B
A
2
B
3
1
3
1
B
A
A
3
3
B
2
Uso de una actividad ficticia para tener representación
única de las actividades concurrentes A y B
Diagrama de actividades tipo red
Regla 3. Para mantener las relaciones de precedencia correctas,
se deben contestar las siguientes preguntas cuando se agrega a
la diagrama cada actividad.
¿Qué actividades deben anteceder inmediatamente a la actividad
actual?
¿Qué actividades deben seguir inmediatamente a la actividad
actual?
¿Qué actividades deben efectuarse en forma concurrente o
simultanea con la actividad actual?
Diagrama de actividades tipo red
Para contestar estas preguntas se podrá
necesitar el uso de actividades ficticias, para
asegurar las precedencias correctas entre las
actividades. Por ejemplo, considere al siguiente
segmento de un proyecto.
1. La actividad C comienza de inmediato
después de haber terminado A y B.
2. La actividad E se inicia después de que solo
termino la actividad B.
Diagrama de actividades tipo red
La 1ª parte de la figura siguiente muestra la
representación incorrecta de esta relación de
precedencia, porque pide que A y B terminen antes
de poder iniciar E. En la 2ª parte se corrige la
situación con el uso de la actividad ficticia.
Diagrama de actividades tipo red
Uso de una actividad ficticia para asegurar una relación
de precedencia correcta
Ejemplo:
Las zapatas de cimentación de un edificio se pueden
terminar en cuatro secciones conectadas. Las
actividades de cada sección comprenden:
1º Excavación
2º Colocación de acero
3º Colocado del Hormigón
No puede comenzar la excavación de una sección, sino
hasta haber terminado la de la sección anterior. Esta
misma restricción se aplica a la colocación del
hormigón.
Formule el diagrama del proyecto.
Ejemplo (Resolución):
Ejemplo:
Las actividades de la tabla siguiente describen la
construcción de una casa nueva. Formule la
diagrama asociada al proyecto. Para este ejemplo
se tomaron valores alcanzados de la experiencia de
la construcción de una casa pequeña
Ejemplo:
Actividad
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
Instalación de faenas
Llevar servicios al sitio
Excavar
Vaciar cimientos
Plomería exterior
Muro de mampostería
Instalación eléctrica
Contrapiso
Armar el techo
Plomería interior
Cubierta
Recubrimiento aislante
exterior
Instalar ventanas y puertas
exteriores
Poner ladrillo
Aislar paredes y techos
Revoque interior
Cielo raso
Acabados interiores
Acabados exteriores
Limpieza y retiro de
escombro
Predecesor (es)
Duración
(Días)
—
—
A
C
B, C
D
F
G
F
E, H
I
1
2
1
2
6
10
3
1
1
5
2
F, J
1
F
2
L, M
G, J
O
I, P
P
I, N
4
2
2
1
7
7
S
3
Ejemplo:
La figura siguiente muestra el diagrama que describe
las relaciones de precedencia entre las diferentes
actividades. Con las actividades ficticias (líneas
segmentada), se obtienen nodos finales únicos para
las actividades de concurrentes. La numeración de
los nodos se hace en forma que indique el avance en
el proyecto.
Ejemplo:
K-2
7
I-
S- 7
18
5
11
12
P-2
13
3
19
14
Q-1
-2
E-6
17
T-
O-2
B
10
4
N-4
L-1
9
H-1
5
J-
F - 10
-1
A
C-1
D-2
-3
3
16
G
1
1
M-2
6
2
8
R-7
15
Ruta crítica (CPM)
El resultado final del CPM es la formulación o
construcción del programa del proyecto. Para
lograr este objetivo en una forma adecuada, se
hacen cálculos especiales con los que se obtiene la
siguiente información.
1.
2.
Tiempo total necesario para terminar el proyecto.
Clasificación de las actividades del proyecto en críticas
y no críticas.
Calculo para la ruta crítica (CPM)
Para efectuar los cálculos necesarios, se
define lo siguiente:
j = Tiempo más temprano de ocurrencia del evento j.
Δj = Tiempo más tardío de ocurrencia del evento j.
Dij =Duración de la actividad (i, j).
Las definiciones de los tiempos más temprano
y más tardío del evento j se especifican en
relación con las fechas de inicio y terminación
de todo el proyecto.
Calculo para la ruta crítica (CPM)
Los cálculos de la ruta crítica implican dos
pasos: Paso hacia delante, determina los
tiempos más tempranos o de ocurrencia de los
eventos, y el Paso hacia atrás, calcula sus
tiempos más tardíos de ocurrencia.
Paso hacia delante (tiempos más
tempranos de ocurrencia o tiempos más
próximos, de ocurrencia, ). Los cálculos
se inician en el nodo 1 (inicio) y avanzan en
forma intuitiva hasta el nodo final n.
Calculo para la ruta crítica (CPM)
Paso Inicial: Poner 1(inicio) = 0, para indicar que el proyecto
se inicia cuando el tiempo es 0.
Paso general j: Dado que los nodos p, q, …, y v están
enlazados directamente con el nodo j por las actividades de
entrada (p, j), (q, j),…, (v, j) y que los tiempos más tempranos
de ocurrencia de los eventos (nodos) p, q, …, y v ya se han
calculado, entonces se calcula el tiempo más temprano de
ocurrencia del evento j como sigue:
j = máx {p + Dpj, q + Dqj,…….., v + Dvj}
El paso hacia delante se termina cuando se calcula n(final) en
el nodo n. Por definición, j representa la ruta (duración) más
larga al nodo j.
Calculo para la ruta crítica (CPM)
Paso hacia atrás (tiempos más tardíos de
ocurrencia o tiempos más lejanos, de
ocurrencia, Δ). Después de terminar el paso hacia
delante, los cálculos del paso hacia atrás comienzan
en el nodo n y terminan en el nodo 1.
Calculo para la ruta crítica (CPM)
Paso Inicial: Poner Δn(final) = n(final), para indicar que
las ocurrencias más temprano y más tardío del ultimo
nodo en el proyecto son iguales.
Paso General j: Dado que los nodos p, q, …, y v están
enlazados en forma directa con el nodo j por actividades
de salida (j, p), (j, q),…, (j, v) y que ya se calcularon los
tiempos más tardíos de los nodos p, q, …, y v, el tiempo
tardío del nodo j se calcula como sigue:
Δj = mín {Δp – Djp, Δq – Djq,…….., Δv – Djv
El paso hacia atrás se termina cuando se calcula Δ1.
Calculo para la ruta crítica (CPM)
Con base en los cálculos anteriores, una actividad (i, j)
será crítica si satisface tres condiciones:
Δi = i
Δj = j
Δj – Δi = j – i = Dij
Las tres condiciones indican que los tiempos más
tempranos y más tardíos de ocurrencia de los nodos i y j
son iguales, y que la duración Dij se ajusta exactamente al
intervalo especificado de tiempo. Una actividad que no
satisface las tres condiciones es no crítica.
Calculo para la ruta crítica (CPM)
Ejemplo: Determinar la ruta crítica para el
diagrama del proyecto de la figura. Todas las
duraciones están en días.
K-2
7
I-
S- 7
18
5
11
12
P-2
13
3
19
14
Q-1
-2
E-6
17
T-
O-2
B
10
4
N-4
L-1
9
H-1
5
J-
F - 10
-1
A
C-1
D-2
-3
3
16
G
1
1
M-2
6
2
8
R-7
15
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución
Paso hacia delante.
Nodo 1. Hacer o definir 1 = 0
Nodo 2. 2 = 1 + D12 = 0 + 1 = 1
Nodo 3. 3 = 2 + D23 = 1 + 1 = 2
Nodo 4. 4 = máx. {1 + D14, 3 + D34}= máx. {0 +
2, 2 + 0}= máx. {2, 2} = 2
Nodo 5. 5 = 3 + D35 = 2 + 2 = 4
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Nodo 6. 6 = 5 + D56 = 4 + 10 = 14
Nodo 7. 7 = 6 + D67 = 14 + 1 = 15
Nodo 8. 8 = 7 + D78 = 15 + 2 = 17
Nodo 9. 9 = 6 + D69 = 14 + 3 = 17
Nodo 10. 10 = máx. {4 + D4-10, 9 + D9-10}= máx.
{2 + 6, 17 + 1}
= máx. {8, 18} = 18
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Nodo 11. 11 = máx. {6 + D6-11, 9 + D9-11, 10 + D10-11}
= máx. {14 + 0, 17 + 0, 18 + 5}= máx. {14, 17, 23}
= 23
Nodo 12. 12 = 11 + D11-12 = 23 + 2 = 25
Nodo 13. 13 = {7 + D7-13, 12 + D12-13}= máx. {15 + 0, 25 +
2}
= máx. {15, 27} = 27
Nodo 14. 14 = 13 + D13-14 = 27 + 1 = 28
Nodo 15. 15 = 13 + D13-15 = 27 + 7 = 34
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Nodo 16. 16 = máx. {6 + D6-16, 11 + D11-16}= máx. {14 + 2, 23 + 1}
= máx. {16, 24} = 24
Nodo 17. 17 = máx. {7 + D7-17, 16 + D16-17}= máx. {15 + 0, 24 + 4}
= máx. {15, 28} = 28
Nodo 18. 18 = 17 + D17-18 = 28 + 7 = 35
Nodo 19. 19 = máx. {8 + D8-19, 14 + D14-19, 15 + D15-19, 18 + D1819}
= máx. {17 + 0, 28 + 0, 34 + 0, 35 + 3}
= máx. {17, 28, 34, 38} = 38
Los cálculos indican que se puede acabar en 38 días.
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Paso hacia atrás.
Nodo 19. Hacer o definir Δ19= 19 = 38
Nodo 18. Δ18 = Δ19 – D18-19 = 38 – 3 = 35
Nodo 17. Δ17 = Δ18 – D17-18 = 35 – 7 = 28
Nodo 16. Δ16 = Δ17 – D16-17 = 28 – 4 = 24
Nodo 15. Δ15 = Δ19 – D15-19 = 38 – 0 = 38
Nodo 14. Δ14 = Δ19 – D14-19 = 38 – 0 = 38
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Nodo 13. Δ13 = mín {Δ14 – D13-14, Δ15 – D13-15} = mín {38 – 1, 38
– 7}=
mín {37, 31}= 31
Nodo 12. Δ12 = Δ13 – D12-13 = 31 – 2 = 29
Nodo 11. Δ11 = mín {Δ12 – D11-12, Δ16 – D11-16} = mín {29 – 2, 24
– 1}=
mín {27, 23}= 23
Nodo 10. Δ10 = Δ11 – D10-11 = 23 – 5 = 18
Nodo 9. Δ9 = mín {Δ10 – D9-10, Δ11 – D9-11} = mín {18 – 1, 23 –
0} = mín {17, 23} = 17
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Nodo 8. Δ8 = Δ19 – D8-19 = 38 – 0 = 38
Nodo 7. Δ7 = mín {Δ8 – D7-8, Δ13 – D7-13, Δ17 –D7-17}
= mín {38 – 2, 31 – 0, 28 – 0}= mín {36, 31, 28}= 28
Nodo 6. Δ6 = mín {Δ7 – D6-7, Δ9 – D6-9, Δ11 – D6-11, Δ16 – D6-16}
= mín {28 – 1, 17 – 3, 23 – 0, 24 – 2}= mín {27, 14,
23, 22}= 14
Nodo 5. Δ5 = Δ6 – D5-6 = 14 – 10= 4
Nodo 4. Δ4 = Δ10 – D4-10 = 18 – 6= 12
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Nodo 3. Δ3 = mín {Δ4 – D3-4, Δ5 – D3-5} = mín {12 –
0, 4 – 2}= mín {12, 2}= 2
Nodo 2. Δ2 = Δ3 – D2-3 = 2 – 1= 1
Nodo 1. Δ1 = mín {Δ2 – D1-2, Δ4 – D1-4} = mín {1 – 1,
12 – 2}=
mín {0, 10}= 0
Si los cálculos fueron correctos, siempre terminaran
con Δ1 = 0.
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Los cálculos en los pasos hacia delante y hacia atrás se
resumen en una figura. Las reglas para determinar las
actividades críticas indican que la ruta crítica es
1→2→3→5→6→9→10→11→16→17→18→19,
que
abarca la diagrama desde el inicio (nodo 1) hasta el fin
(nodo 19). La suma de las duraciones de las actividades
críticas [(1,2), (2,3), (3,5), (5,6), (6,9), (9,10), (10,11),
(11,16), (16,17), (17,18), (18,19)] es igual a la duración del
proyecto (= 38 días).
Calculo para la ruta crítica (CPM)
Ejemplo: Resolución (Continuación)
Observe que la actividad (6,11), (6,16) y (9,11) satisfacen las
dos primeras condiciones para que la actividad sea crítica
Δ6 = 6 = 14, Δ11 = 11 = 23, pero Δj – Δi = j – i = Dij
23 – 14 = 23 – 14 = 0
Δ6 = 6 = 14, Δ16 = 16 = 24, pero Δj – Δi = j – i = Dij
24 – 14 = 24 – 14 = 2
Δ9 = 9 = 17, Δ11 = 11 = 23, pero Δj – Δi = j – i = Dij
23 – 17 = 23 – 17 = 0.
Por consiguiente, esas actividades no son críticas.
Calculo para la ruta crítica (CPM)
Leyenda
Paso hacia adelante
28
15
Paso hacia atrás:
9
-2
4
17
17
11
10
12
18
18
29
25
E-6
12
2
17
8
35
35
S- 7
18
T-
23
23
P-2
3
Inicio del paso
hacia atrás
38
28
19
14
13
31
27
38
38
Fin del paso
hacia adelante
Q-1
4
4
N-4
L-1
16
O-2
F - 10
D-2
M-2
5
28
28
24
24
5
3
1
J-
6
I-
H-1
22
C-1
-1
A
14
14
B
Inicio del paso
hacia adelante
1
1
-3
2
2
1
K-2
7
G
Fin del paso
hacia atrás
0
0
j
i
Ruta critica
38
17
R-7
15
38
34
Construcción del cronograma preliminar
Se indica como se puede usar la información obtenida
con los cálculos para desarrollar el programa de tiempo,
o cronograma. Se reconoce que i representa el tiempo
más temprano de iniciación de una actividad (i, j), y que
Δj representa el tiempo más tardío de terminación. Esto
quiere decir que (i, Δj) limita el intervalo máximo de
tiempo durante el cual se puede programar la actividad
(i, j).
Construcción de un cronograma preliminar. Se
ilustrara con un ejemplo el método para construir un
cronograma preliminar.
Construcción del cronograma preliminar
Ejemplo:
Determinar el cronograma para el proyecto del ejemplo anterior.
Se puede tener un cronograma preliminar para las distintas actividades
del proyecto poniendo sus intervalos de tiempo respectivos como se ve
en la figura. Es necesario hacer dos observaciones.
Las actividades críticas (representadas por las líneas llenas) se deben
programar una inmediatamente después de la otra, para asegurar que
el proyecto se termine en la duración especificada de 38 días.
Las actividades no críticas (representadas por líneas segmentadas)
abarcan intervalos que tienen duraciones mayores y que por tanto
permiten holguras en su programación dentro de sus intervalos
asignados.
Construcción del cronograma preliminar
Ejemplo:
Determinación de holguras
Son las holguras de tiempo disponibles dentro del
intervalo asignado para la actividad no crítica. Las
dos más comunes son la holgura total y la
holgura libre.
Interpretación Práctica:
Holgura total: Representa el número de unidades de tiempo de
que disponemos para retrasar el comienzo de la actividad o
aumentar la duración de la actividad sin alterar los tiempos
límite u en principio la programación.
Determinación de holguras
Holgura libre: Representa el número de unidades de tiempo de
que disponemos para retrasar el comienzo de la actividad o
aumentar la duración de la actividad sin alterar el comienzo de
las siguientes.
Holgura independiente: Refleja las unidades disponibles para
que habiéndose alcanzado un suceso en el tiempo límite
pasemos al tiempo lo más pronto posible del suceso siguiente.
i
Determinación de holguras
En la siguiente figura se ve un resumen adecuado
para calcular la holgura total (TFij) y la holgura libre
(FFij) de la actividad (i, j). la holgura total es el
exceso del intervalo de tiempo definido por el tiempo
más temprano de ocurrencia del evento i hasta el
tiempo más tardío de ocurrencia del evento j en la
duración de (i, j); esto es:
i
TFij j
Dij
Determinación de holguras
Calculo de las holguras totales y libres
Determinación de holguras
La holgura libre es el exceso del intervalo de tiempo
definido desde el tiempo más temprano de
ocurrencia del evento i hasta el tiempo más
temprano de ocurrencia del elemento j durante la
duración de (i, j); esto es: FFij = j – i - Dij
Por definición: Ffij <= TF ij
Determinación de holguras
Regla de la bandera roja, para una actividad (i, j)
no crítica:
a) Si FFij = TFij, entonces se puede programar la actividad
en cualquier lugar dentro de su intervalo (
i, j) sin causar
conflicto con el programa.
b) Si FFij < TFij, entonces el inicio de la actividad (i, j) se
puede demorar cuando mucho hasta FFij a partir de su
tiempo más temprano de inicio (
i) sin causar conflicto con
el programa. Toda demora mayor que FFij (pero no mayor
que TFij) se debe acompañar por una demora igual a
partir de
j en el tiempo de iniciación de todas las
actividades que salen del nodo j.
Determinación de holguras
La implicación de la regla es que una actividad (i, j)
no crítica tendrá bandera roja si su FFij < TFij. Esta
bandera roja solo importa si se decide demorar el
inicio de la actividad respecto a su tiempo temprano
de inicio
i, en cuyo caso se debe poner atención a los
tiempos de inicio de las actividades que salen del
nodo j, para evitar conflictos en el programa.
Determinación de holguras
Ejemplo: Calcular las holguras de las actividades no
críticas del diagrama en el ejemplo anterior (CPM), y
describir su uso en la finalización de un cronograma
para el proyecto.
La tabla siguiente resume los cálculos de las holguras
totales y libres. Conviene más hacer los cálculos en
forma directa sobre el diagrama, usando el
procedimiento grafico dado en la teoría.
Determinación de holguras
Ejemplo:
Actividad
no crítica
B
1→4
FIC
3→4
I
6→7
FIC
6 → 11
M
6 → 16
K
7→8
FIC
7 → 13
FIC
7 → 17
FIC
8 → 19
FIC
9 → 11
O
11 → 12
P
12 → 13
Q
13 → 14
R
13 → 15
FIC 14 → 19
FIC 15 → 19
Duración
2
0
1
0
2
2
0
0
0
0
2
2
1
7
0
0
Holgura total
(TF)
12 – 0 – 2 = 10
12 – 2 – 0 = 10
28 – 14 – 1 = 13
23 – 14 – 0 = 9
24 – 14 – 2 = 8
38 – 15 – 2 = 11
31 – 15 – 0 = 16
28 – 15 – 0 = 13
38 – 17 – 0 = 21
23 – 17 – 0 = 6
29 – 23 – 2 = 4
31 – 25 – 2 = 4
38 – 27 – 1 = 10
38 – 27 – 7 = 4
38 – 28 – 0 = 10
38 – 34 – 0 = 4
Holgura libre
(FF)
2–0–2=0
2–2–0=0
15 – 14 – 1 = 0
23 – 14 – 0 = 9
24 – 14 – 2 =8
17 – 15 – 2 = 0
27 – 15 – 0 = 12
28 – 15 – 0 = 13
38 – 17 – 0 = 21
23 – 17 – 0 = 6
25 – 23 – 2 = 0
27 – 25 – 2 = 0
28 – 27 – 1 = 0
34 – 27 – 7 = 0
38 – 28 – 0 = 10
38 – 34 – 0 = 4
Determinación de holguras
Ejemplo: Los cálculos ponen bandera roja en las actividades B
(1,4), FIC (3,4), I (6,7), K (7,8), FIC (7,13), O (11,12), P (12,13), Q
(13,14) y R (13,15), porque sus FF < TF. Las actividades restantes
FIC (6,11), M (6,16), FIC (7,17), FIC (8,19), FIC (9,11), FIC (14,19)
y FIC (15,19), tienen FF = TF, por lo que se pueden programar en
cualquier momento entre su inicio más temprano y su
terminación más tardía.
En cuanto a la actividad I con bandera roja, se ve que FF = 0. Eso
quiere decir que cualquier demora en el inicio de I después de su
tiempo más temprano de inicio (= 14) se debe acoplar con una
demora al menos igual en el inicio de sus actividades posteriores
E y F.
REDES PERT
En CPM se asume que la duración de cada actividad
es conocida con certeza, claramente, en muchas
ocasiones este supuesto no es valido. PERT intenta
corregir este error suponiendo que la duración de
cada actividad es una variable aleatoria de la que
conocemos su ley de distribución (Distribución ); se
consideran tres clases de tiempos estimados:
REDES PERT
1. Tiempo Optimista “a”, es el que representa el
tiempo mínimo posible sin importar el costo o
cuantía de elementos materiales y humanos que se
requieran, donde se supone que la ejecución va
extremadamente bien. En la mayoría de los casos la
probabilidad de realizar la actividad en este
tiempo es pequeña.
REDES PERT
2. Tiempo más probable “m”, donde se supone
que la ejecución se hace bajo condiciones normales.
Esta estimación debe tener en cuenta las
circunstancias normales, considerando algunos
retrasos debidos a imprevistos, y debe estar basada
en la mejor información de que pueda disponerse.
REDES PERT
3. Tiempo pesimista “b”, es un tiempo
excepcionalmente grande que pudiera presentarse
ocasionalmente como consecuencia de accidentes,
falta de suministros, retardos involuntarios, causas
no previstas, etc. donde se supone que la ejecución
va extremadamente mal. la probabilidad de
realizar la actividad en este tiempo es
grande.
REDES PERT
En la siguiente figura se muestra la localización
ideal de estas tres estimaciones con respecto a la
distribución de probabilidad. Se hacen dos
suposiciones para convertir m, a y b en
estimaciones del valor esperado Te y la varianza ν =
σ2 del tiempo que requiere la actividad.
REDES PERT
Suposición 1: la distribución entre a y b es 6
desviaciones estándar, es decir, 6σ = b – a. En
consecuencia, la varianza del tiempo de una
actividad es 1 b a
6
El razonamiento para hacer esta suposición es que
se considera que las colas de muchas
distribuciones de probabilidad (como en la
distribución normal) están más o menos a 3
desviaciones estándar de la media, de manera que
existe una dispersión de alrededor de 6
desviaciones estándar entre las colas.
2
2
REDES PERT
Para obtener la estimación del valor esperado Te, también
es necesaria una suposición sobre la forma de la
distribución de probabilidad.
Suposición 2: la distribución de probabilidad de cada
actividad es (al menos aproximadamente) una distribución
beta .
Este tipo de distribución tiene la forma que se mostró en la
figura anterior, con una sola moda (m) y dos puntos
terminales (a y b), en donde se supone que 0 ≤ a ≤ b. Así, se
ajusta bien a las definiciones de los tres tiempos estimados,
y da una forma razonable para la distribución de los
tiempos de las actividades.
REDES PERT
Bajo estas suposiciones, el valor esperado del
tiempo de una actividad es aproximadamente
1
1
Te 2m a b
3
2
REDES PERT
Note que el medio del intervalo (a+b)/2 se encuentra a
la mitad entre a y b, de manera que Te es la media
aritmética ponderada de la moda y la mitad del
intervalo, con un peso de dos tercios para la moda.
Aunque la suposición de una distribución beta es
arbitraria, sirve para el propósito de localizar el valor
esperado respecto a m, a y b de una manera razonable.
Con base en los estimados (o estimaciones), el tiempo
promedio de duración , estará en el intervalo [a, b] y su
varianza , de acuerdo a la distribución que se calculan
como sigue:
REDES PERT
a 4m b
D
6
cálculos de ruta crítica
ba
v
6
2
Los
(CPM) que se describieron
anteriormente se puede aplicar en forma directa,
sustituyendo la estimación única D por .
D
Ahora es posible estimar la probabilidad de que un nodo j
en la diagrama suceda en un tiempo programado
especificado con anterioridad, Sj. Sea ej el tiempo más
temprano de ocurrencia del nodo j. como las duraciones de
las actividades que van del nodo de inicio al nodo j son
variables aleatorias, ej también debe ser una variable
aleatoria.
REDES PERT
Suponiendo que todas las actividades en la diagrama
sean estadísticamente independientes, se puede
determinar la media E{ej}, y la varianza, var{ej} como
sigue, si solo hay una ruta desde el nodo de inicio hasta el
nodo j, la media es la suma de las duraciones esperadas ,
para todas las actividades a lo largo de esa ruta, y la
D
varianza es la suma de las varianza u de las mismas
actividades. Por otra parte, si hay más de una ruta que
llegue al nodo j, será necesario calcular primero la
distribución estadística de la duración de la ruta más
larga, antes de calcular la media y la varianza correctas.
REDES PERT
Este problema es bastante difícil, por que equivale a
determinar la distribución del máximo de varias
variables aleatorias. Por consiguiente, una hipótesis
simplificadora es calcular la media y la varianza, E{ej}
y var{ej}, como el de la ruta al nodo j que tenga la
suma mayor de duraciones esperadas de las
actividades. Si hay dos o más rutas que tienen la
misma media (o promedio), se selecciona la que tenga
la varianza mayor, por que refleja la máxima
incertidumbre y en consecuencia conduce a un
estimado más conservador de las probabilidades.
REDES PERT
Una vez calculados la media y la varianza E{ej} y
var{ej} de la ruta al nodo j, la probabilidad que se
realice el nodo j a un tiempo Sj preestablecido, se
calcula con la siguiente formula:
e j Ee j S j Ee j
Pe j S j P
Pz K j
var e j
var e j
En donde
z = Variable aleatoria normal estándar
Kj
S j Ee j
var e j
REDES PERT
Ejemplo:
Se tiene el proyecto del ejemplo de CPM. Para evitar
repetir los cálculos de ruta crítica, se seleccionaron
los valores de a, m y b en la tabla siguiente, de tal
modo que Dij = Dij para toda i y j en el ejemplo
mencionado.
REDES PERT
Ejemplo: (Continuación)
Actividad
i-j
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
1-2
1-4
2-3
3-5
4-10
5-6
6-9
9-10
6-7
10-11
7-8
11-16
6-16
16-17
11-12
12-13
13-14
13-15
17-18
18-19
Optimista
(a)
1
1
1
1
4
8
1
1
1
3
1
1
1
2
1
1
1
5
5
1
Más probable
(m)
1
2
1
2
6
10
3
1
1
5
2
1
2
4
2
2
1
7
7
3
Pesimista
(b)
3
4
3
4
8
12
5
3
3
8
4
3
4
6
4
5
3
9
10
5
REDES PERT
Ejemplo: (Continuación)
K-2
7
I-
S- 7
18
5
11
12
P-2
13
3
19
14
Q-1
-2
E-6
17
T-
O-2
B
10
4
N-4
L-1
9
H-1
5
J-
F - 10
-1
A
C-1
D-2
-3
3
16
G
1
1
M-2
6
2
8
R-7
15
REDES PERT
Ejemplo: (Continuación)
Leyenda
Paso hacia adelante
28
15
Paso hacia atrás:
M-2
4
4
-2
4
17
17
11
10
12
18
18
29
25
E-6
12
2
17
8
35
35
S- 7
18
T-
23
23
P-2
3
Inicio del paso
hacia atrás
38
28
19
14
13
31
27
38
38
Fin del paso
hacia adelante
Q-1
9
5
N-4
L-1
16
O-2
F - 10
D-2
28
28
24
24
5
3
1
J-
6
I-
H-1
22
C-1
-1
A
14
14
B
Inicio del paso
hacia adelante
1
1
-3
2
2
1
K-2
7
G
Fin del paso
hacia atrás
0
0
j
i
Ruta critica
38
17
R-7
15
38
34
VDijij
REDES PERT
Ejemplo: (Continuación)
La media Dij y la varianza
Vij de las distancias
actividades se ve en la
tabla de abajo. Observe
que para una actividad
ficticia (a, b, m) = (0, 0,
0), y en consecuencia su
media y su varianza
también son iguales a cero.
Actividad
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
i-j
1-2
1-4
2-3
3-5
4-10
5-6
6-9
9-10
6-7
10-11
7-8
11-16
6-16
16-17
11-12
12-13
13-14
13-15
17-18
18-19
Dij
1.33
2.17
1.33
2.17
6.00
10.00
3.00
1.33
1.33
5.17
2.17
1.33
2.17
4.00
2.17
2.33
1.33
7.00
7.17
3.00
Vij
0.11
0.25
0.11
0.25
0.44
0.44
0.44
0.11
0.11
0.69
0.25
0.11
0.25
0.44
0.25
0.44
0.11
0.44
0.69
0.44
REDES PERT
Ejemplo: (Continuación)
La tabla siguiente muestra la trayectoria más larga
del nodo 1 a los distintos nodos, junto con su media y
su varianza asociados.
REDES PERT
Ejemplo: (Continuación)
Nodo
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Ruta más larga basada
en duraciones medias
1-2
1-2-3
1-4
1-2-3-5
1-2-3-5-6
1-2-3-5-6-7
1-2-3-5-6-7-8
1-2-3-5-6-9
1-2-3-5-6-9-10
1-2-3-5-6-9-10-11
1-2-3-5-6-9-10-11-12
1-2-3-5-6-9-10-11-12-13
1-2-3-5-6-9-10-11-12-13-14
Media de
la ruta
Desviación estándar
de la ruta
1.33
2.66
2.17
4.83
14.83
16.16
18.33
17.83
19.16
24.33
26.5
28.83
0.665
1.330
1.085
2.415
7.415
8.080
9.165
8.915
9.580
12.165
13.250
14.415
30.16
15.080
35.83
25.66
29.66
17.915
12.830
14.830
36.83
18.415
39.83
19.915
1-2-3-5-6-9-10-11-12-13-15
16
17
1-2-3-5-6-9-10-11-16
1-2-3-5-6-9-10-11-16-17
18
1-2-3-5-6-9-10-11-16-17-18
19
1-2-3-5-6-9-10-11-16-17-18-19
REDES PERT
Ejemplo: (Continuación)
Por ultimo, en la tabla siguiente se calcula la
probabilidad de que cada nodo se realice en un
tiempo Sj preestablecido, especificado por el
analista.
REDES PERT
Ruta más larga basada
en duraciones medias
Nodo
Media de
la ruta
Desviación estándar
de la ruta
2
1-2
1.33
0.665
3
1-2-3
2.66
1.330
4
1-4
2.17
1.085
5
1-2-3-5
4.83
2.415
6
1-2-3-5-6
14.83
7.415
7
1-2-3-5-6-7
16.16
8.080
8
1-2-3-5-6-7-8
18.33
9.165
9
1-2-3-5-6-9
17.83
8.915
10
1-2-3-5-6-9-10
19.16
9.580
11
1-2-3-5-6-9-10-11
24.33
12.165
12
1-2-3-5-6-9-10-11-12
26.5
13.250
13
1-2-3-5-6-9-10-11-12-13
28.83
14.415
14
1-2-3-5-6-9-10-11-12-13-14
30.16
15.080
15
1-2-3-5-6-9-10-11-12-13-15
35.83
17.915
16
1-2-3-5-6-9-10-11-16
25.66
12.830
17
1-2-3-5-6-9-10-11-16-17
29.66
14.830
18
1-2-3-5-6-9-10-11-16-17-18
36.83
18.415
19
1-2-3-5-6-9-10-11-16-17-18-19
39.83
19.915
Ejemplo: (Continuación)
Sj
Kj
P z K j
1
2
2
3
2
3
4
5
12
16
14
18
18
20
15
20
18
21
23
25
26
27
27
30
30
31
33
37
25
27
28
30
34
37
38
40
-0.50
1.01
-0.50
0.26
-0.16
0.76
-0.34
0.07
-0.38
0.16
-0.27
0.23
-0.04
0.18
-0.32
0.24
-0.12
0.19
-0.11
0.06
-0.04
0.04
-0.13
0.08
-0.01
0.06
-0.16
0.07
-0.05
0.10
-0.11
0.02
-0.15
0.01
-0.09
0.01
0.31
0.84
0.31
0.6
0.44
0.78
0.37
0.53
0.35
0.56
0.39
0.59
0.48
0.57
0.37
0.59
0.45
0.57
0.46
0.52
0.48
0.52
0.45
0.53
0.5
0.52
0.44
0.53
0.48
0.54
0.45
0.51
0.44
0.504
0.46
0.504
REDES PERT
Ejemplo: (Continuación)
Como vemos en la tabla anterior en la ruta crítica 12-3-5-6-9-10-11-16-17-18-19, su media es de 39.83
días para finalizar y la probabilidad de acabar en 40
días es de 50.4% y en 38 días es de 46 %